
WPROWADZENIE
DO SZTUCZNEJ INTELIGENCJI
POLITECHNIKA WARSZAWSKA
WYDZIAŁ MECHANICZNY ENERGETYKI I LOTNICTWA
MEL
MEL
NS 586
Dr in
ż
. Franciszek Dul
© F.A. Dul 2007
18. UCZENIE SIĘ
NA PODSTWIE OBSERWACJI
© F.A. Dul 2007
NA PODSTWIE OBSERWACJI

Uczenie na podstawie obserwacji
Poka
ż
emy, w jaki sposób agent mo
ż
e
ulepszy
ć
swoje działania i zachowania
poprzez uczenie si
ę
na podstawie
poprzez uczenie si
ę
na podstawie
swoich własnych do
ś
wiadcze
ń
.
© F.A. Dul 2007

• Agenci ucz
ą
cy si
ę
• Uczenie indukcyjne
• Uczenie drzewa decyzyjnego
• Teoria uczenia - dlaczego to działa?
Plan rozdziału
© F.A. Dul 2007
Trzeba si
ę
uczy
ć
Obserwuj
ą
c
ś
rodowisko agent nie tylko zdobywa
wiedz
ę
o
ś
wiecie, ale tak
ż
e mo
ż
e ulepszy
ć
swoje
działania w przyszło
ś
ci.
Uczenie ma mie
ć
ró
ż
ne formy – mo
ż
e polega
ć
po prostu na gromadzeniu do
ś
wiadcze
ń
, ale mo
ż
e
tak
ż
e prowadzi
ć
do stworzenia ogólnych teorii,
na miar
ę
teorii Einsteina.
©
F.A. Dul 2007
na miar
ę
teorii Einsteina.
Rozpoczniemy od omówienia uczenia indukcyjnego
na podstawie obserwacji w oparciu o logik
ę
zda
ń
.
Odpowiemy te
ż
na pytanie, dlaczego uczenie działa?
18.1. Formy uczenia
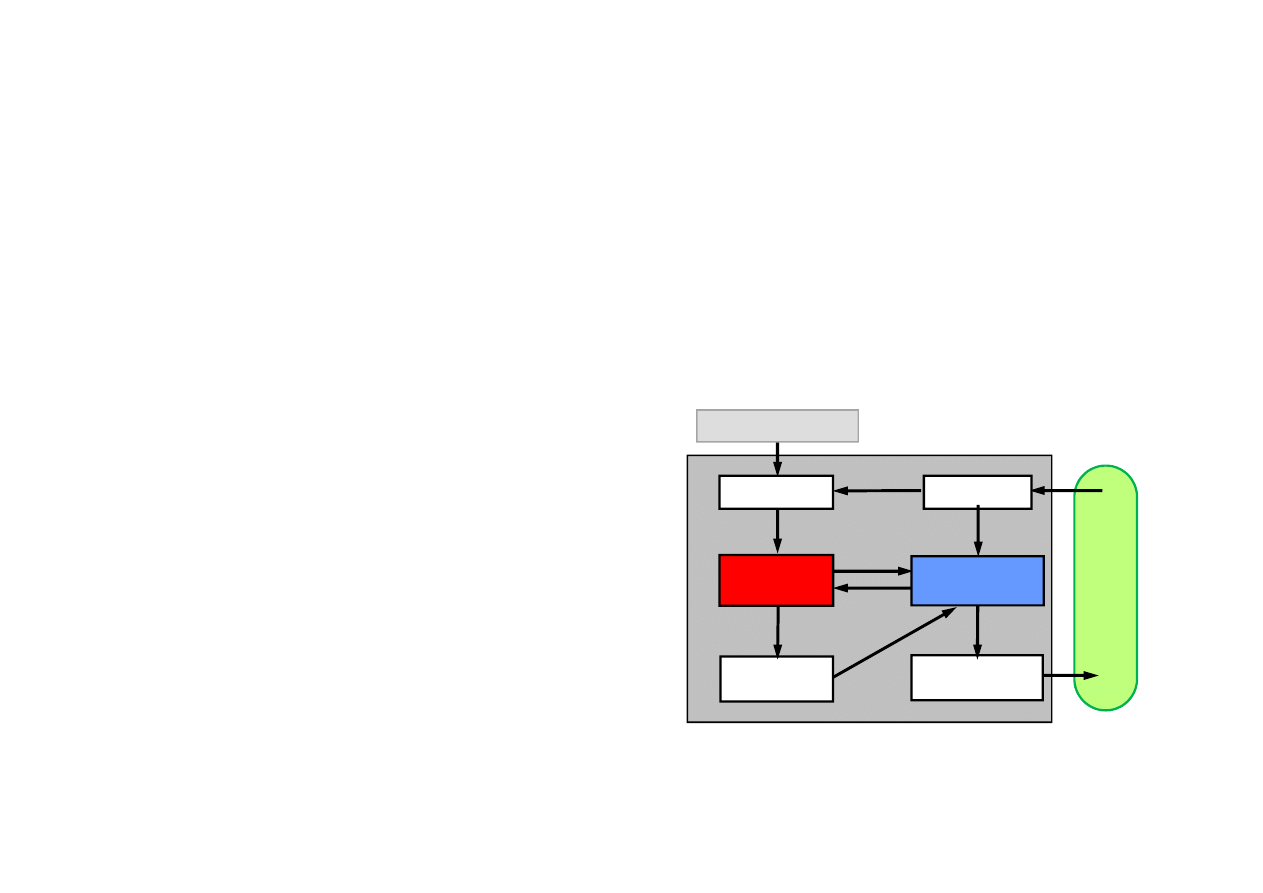
Agent ucz
ą
cy si
ę
posiada:
Standard jako
ś
ci
Agent musi si
ę
uczy
ć
, je
ż
eli musi działa
ć
w nieznanym
ś
rodowisku.
Uczenie jest metod
ą
konstruowania agenta polegaj
ą
c
ą
na skonfrontowaniu agenta z rzeczywisto
ś
ci
ą
zamiast
budowania dokładnego modelu jego działania.
Uczenie modyfikuje mechanizm podejmowania decyzji
agenta w celu polepszenia jego osi
ą
gów.
© F.A. Dul 2007
Agent ucz
ą
cy si
ę
posiada:
Ś
ro
d
o
w
is
k
o
Agent
Czujniki
Mechanizmy
wykonawcze
Generator
problemów
Krytyka
Sprz
ęż
enie
zwrotne
Zmiany
Wiedza
Cel
uczenia
Moduł
ucz
ą
cy si
ę
Moduł
decyzyjny
• moduł decyzyjny
, który
dokonuje wyboru działa
ń
na
podstawie obserwacji,
• moduł ucz
ą
cy si
ę
, który
modyfikuje moduł decyzyjny
tak, aby podejmował on lepsze
decyzje.
Moduły ucz
ą
ce si
ę
mog
ą
mie
ć
ró
ż
ne postacie, zale
ż
ne od typu
agenta który ma si
ę
uczy
ć
.

18.1. Formy uczenia
• Rodzaju elementów modułu decyzyjnego
które maj
ą
by
ć
uczone (odwzorowanie stan-działanie, reprezentacja cech
ś
rodowiska, model
ś
rodowiska i działa
ń
, u
ż
yteczno
ść
stanów,
u
ż
yteczno
ść
działa
ń
, cel),
• Reprezentacji
nauczanych elementów (refleksowa, logiczna,
probabilistyczna).
• Sprz
ęż
enia zwrotnego
które mo
ż
e by
ć
u
ż
yte do uczenia tych
elementów.
• Zakresu
wiedzy pocz
ą
tkowej
(apriorycznej) agenta.
Posta
ć
modułu ucz
ą
cego zale
ż
y od:
© F.A. Dul 2007`
• Zakresu
wiedzy pocz
ą
tkowej
(apriorycznej) agenta.
• Uczenie nadzorowane
(supervised learning): wyznaczenie
funkcji na podstawie przykładów ucz
ą
cych (danych i
odpowiedzi),
• Uczenie nienadzorowane
(unsupervised learning): wyznaczenie
funkcji na podstawie danych bez znajomo
ś
ci odpowiedzi.
• Uczenie ze wzmocnieniem
(reinforcement learning):
wyznaczenie funkcji na podstawie oceny wyników działania
agenta (najbardziej ogólne).
Sprz
ęż
enie zwrotne jest najwa
ż
niejszym czynnikiem
okre
ś
laj
ą
cym rodzaj uczenia:

18.2. Uczenie indukcyjne
Uczenie indukcyjne jest najprostsz
ą
form
ą
uczenia si
ę
.
Agent powinien nauczy
ć
si
ę
funkcji celu
f (target function).
Uczenie realizowane jest za pomoc
ą
wzorców
b
ę
d
ą
cych
parami (x, f(x)), x
∈
D.
Zbiór wzorców jest
zbiorem ucz
ą
cym
.
Zadanie uczenia indukcyjnego:
Znale
źć
hipotez
ę
h nale
żą
c
ą
do przestrzeni hipotez H
© F.A. Dul 2007
Znale
źć
hipotez
ę
h nale
żą
c
ą
do przestrzeni hipotez H
tak
ą
,
ż
e h przybli
ż
a f dla danego zbioru ucz
ą
cego
wzorców.
Dobra hipoteza h umo
ż
liwia
uogólnienie
- prawidłow
ą
klasyfikacj
ę
wzorca nie nale
żą
cego do zbioru ucz
ą
cego.
Uczenie indukcyjne jest bardzo uproszczonym sposobem
uczenia si
ę
, gdy
ż
:
• ignoruje wiedz
ę
aprioryczn
ą
posiadan
ą
przez agenta,
• zakłada,
ż
e dysponujemy zbiorem ucz
ą
cym.
××××
f(x)
18.2. Uczenie indukcyjne
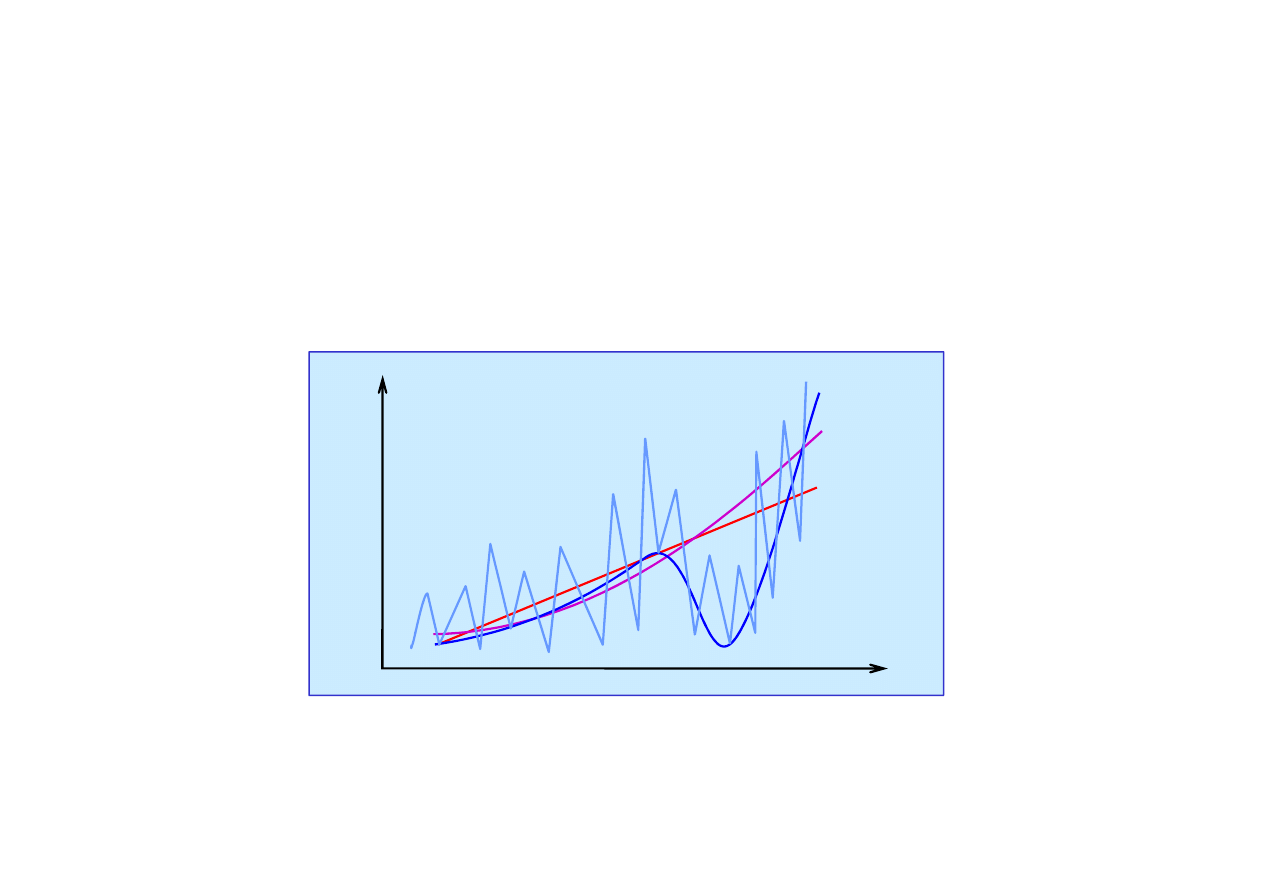
Metoda uczenia indukcyjnego
Hipoteza h jest
zgodna
(consistent) je
ż
eli pokrywa si
ę
z funkcj
ą
f dla wszystkich wzorców.
Dopasowanie hipotezy h tak, aby zgadzała si
ę
z funkcj
ą
celu
f na zbiorze ucz
ą
cym mo
ż
na osi
ą
gn
ąć
np. poprzez
dopasowanie krzywej (curve fitting).
h
1
= a
0
+ a
1
x
h
2
= a
0
+ a
1
x + a
2
x
2
h
5
= a
0
+ a
1
x + a
2
x
2
+ a
3
x
3
+ a
4
x
4
+ a
5
x
5
××××
××××
××××
××××
××××
××××
x
© F.A. Dul 2007
Któr
ą
zgodn
ą
hipotez
ę
nale
ż
y zatem wybra
ć
?
Brzytwa Ockhama
(Ockham’s razor): nale
ż
y wybra
ć
najprostsz
ą
hipotez
ę
zgodn
ą
z danymi.
h
1
= a
0
+ a
1
x

18.2. Uczenie indukcyjne
Identyfikacja jako uczenie indukcyjne
Identyfikacja parametryczna
polega na wyznaczeniu
parametrów p
danego
modelu M(x(t);p) tak, aby predykcja
stanu x(t) była zgodna z obserwacjami y(t
k
), np. w sensie
normy
Identyfikacja parametryczna jest wi
ę
c rodzajem uczenia
∑
=
∈
−
=
n
k
k
k
D
t
t
1
||
)
;
(
)
(
||
min
arg
q
x
y
p
q
© F.A. Dul 2007
Identyfikacja parametryczna jest wi
ę
c rodzajem uczenia
indukcyjnego, w którym funkcja celu dana jest niejawnie
poprzez model zale
ż
ny od parametrów.
Identyfikacja strukturalna
polega na wyznaczeniu struktury
modelu, np. w postaci grafu przepływu informacji, systemu
modeli przyczynowych, itp.

18.3. Uczenie drzew decyzyjnych
Drzewo decyzyjne jest struktur
ą
funkcyjn
ą
na wej
ś
ciu której
s
ą
atrybuty
, za
ś
na wyj
ś
ciu –
decyzja
.
Atrybuty oraz decyzja mog
ą
by
ć
dyskretne lub ci
ą
głe.
Drzewo decyzyjne stanowi jedn
ą
z mo
ż
liwych reprezentacji
hipotez.
Drzewo decyzyjne mo
ż
e reprezentowa
ć
moduł decyzyjny
agenta.
Uczenie drzew decyzyjnych jest jedn
ą
z najbardziej
© F.A. Dul 2007
Uczenie drzew decyzyjnych jest jedn
ą
z najbardziej
u
ż
ytecznych form uczenia.
Uczenie drzew decyzyjnych dyskretnych nazywa si
ę
klasyfikacj
ą
, za
ś
ci
ą
głych –
regresj
ą
.
Klasyfikacja boolowska u
ż
ywa warto
ś
ci Fałsz i Prawda.
Drzewo decyzyjne wyznacza decyzj
ę
na podstawie ci
ą
gu
testów.
Ka
ż
dy test dotyczy pewnego atrybutu, za
ś
li
ś
cie drzewa
okre
ś
laj
ą
wypracowane decyzje.

18.3. Uczenie drzew decyzyjnych
Przykład
Nale
ż
y zdecydowa
ć
czy czeka
ć
na stolik w restauracji
opieraj
ą
c si
ę
na nast
ę
puj
ą
cych atrybutach:
• Alternatywa
: czy w pobli
ż
u jest inna restauracja?
• Bar
: czy jest wygodny bar przy którym mo
ż
na poczeka
ć
?
• Pi
ą
tek/Sobota
: czy jest pi
ą
tek lub sobota?
• Głodny
: czy jeste
ś
my głodni?
• Klienci
: liczba osób w restauracji (Brak, Kilku, Pełno);
© F.A. Dul 2007
• Klienci
: liczba osób w restauracji (Brak, Kilku, Pełno);
• Cena
: rozpi
ę
to
ść
cen ($, $$, $$$);
• Deszcz
: czy pada na zewn
ą
trz?
• Rezerwacja
: czy dokonali
ś
my rezerwacji?
• Rodzaj
: rodzaj restauracji (francuska, włoska, tajska, Burger);
• Czas
: szacowany czas oczekiwania: 0-10, 10-30, 30-60, >60 min.
Decyzj
ę
okre
ś
la predykat
CzyCzeka
ć
b
ę
d
ą
cy funkcj
ą
atrybutów.
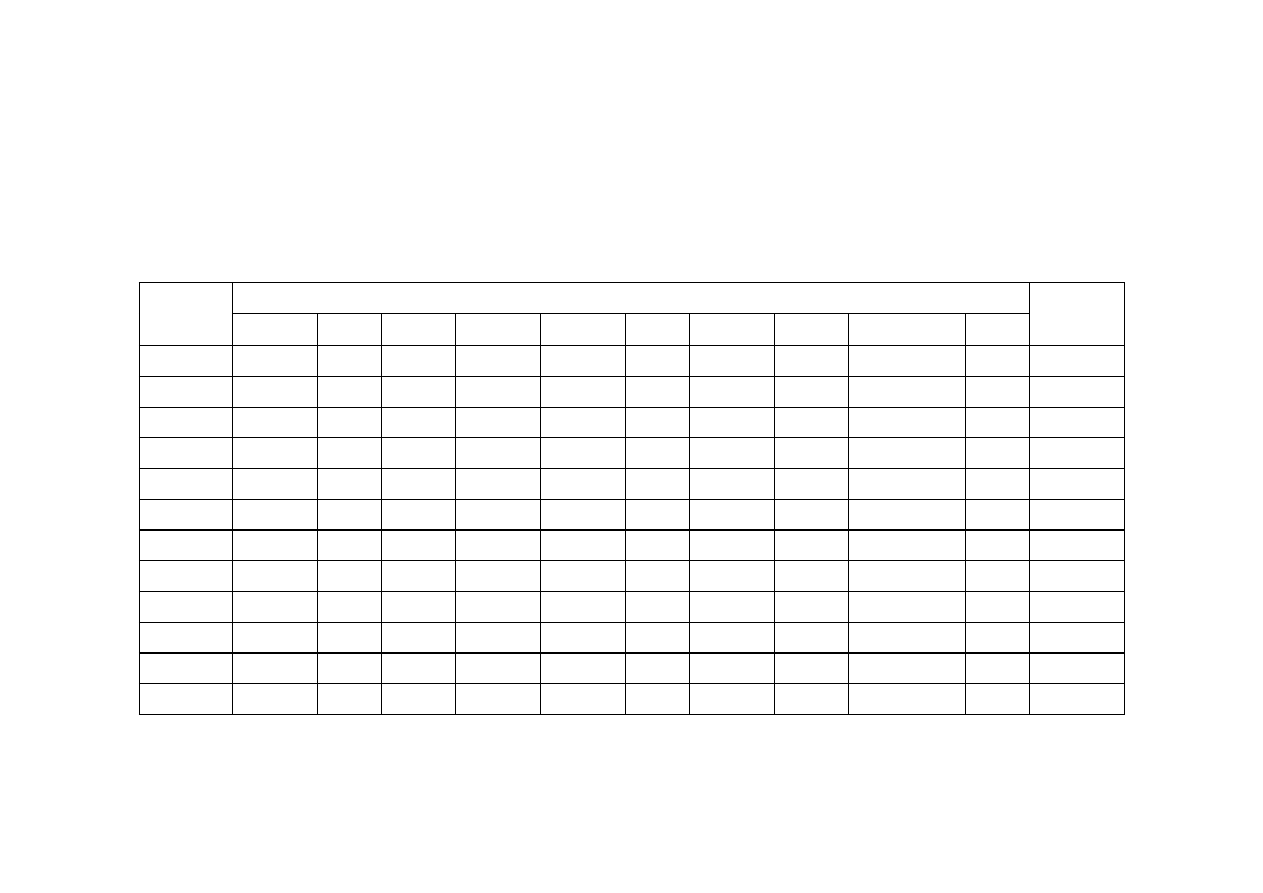
18.3. Uczenie drzew decyzyjnych
Reprezentacje oparte na atrybutach
Wzorce opisane s
ą
przez
warto
ś
ci atrybutów
(boolowskie,
dyskretne, ci
ą
głe).
Zbiór ucz
ą
cy
dla zadania oczekiwania na stolik w restauracji.
Atrybuty
Przykład
Altern.
Bar
Pt/Sob
Głodny
Klienci
Cena
Deszcz
Rezer.
Rodzaj
Czas
Cel
Czy
Czeka
ć
?
X
1
Tak
Nie
Nie
Tak
Kilku
$$$
Nie
Tak
Francuska
0-10
Tak
X
2
Tak
Nie
Nie
Tak
Pełno
$
Nie
Nie
Tajska
30-60
Nie
X
3
Nie
Tak
Nie
Nie
Kilku
$
Nie
Nie
Burger
0-10
Tak
X
Tak
Nie
Tak
Tak
Pełno
$
Nie
Nie
Tajska
10-30
Tak
© F.A. Dul 2007
Klasyfikacja
wzorców jest
pozytywna
(Tak) lub
negatywna
(Nie).
X
4
Tak
Nie
Tak
Tak
Pełno
$
Nie
Nie
Tajska
10-30
Tak
X
5
Tak
Nie
Tak
Nie
Pełno
$$$
Nie
Tak
Francuska
> 60
Nie
X
6
Nie
Tak
Nie
Tak
Kilku
$$
Tak
Tak
Włoska
0-10
Tak
X
7
Nie
Tak
Nie
Nie
Brak
$
Tak
Nie
Burger
0-10
Nie
X
8
Nie
Nie
Nie
Tak
Kilku
$$
Tak
Tak
Tajska
0-10
Tak
X
9
Nie
Tak
Tak
Nie
Pełno
$
Tak
Nie
Burger
> 60
Nie
X
10
Tak
Tak
Tak
Tak
Pełno
$$$
Nie
Tak
Włoska
10-30
Nie
X
11
Nie
Nie
Nie
Nie
Brak
$
Nie
Nie
Tajska
0-10
Nie
X
12
Tak
Tak
Tak
Tak
Pełno
$
Nie
Nie
Burger
30-60
Tak
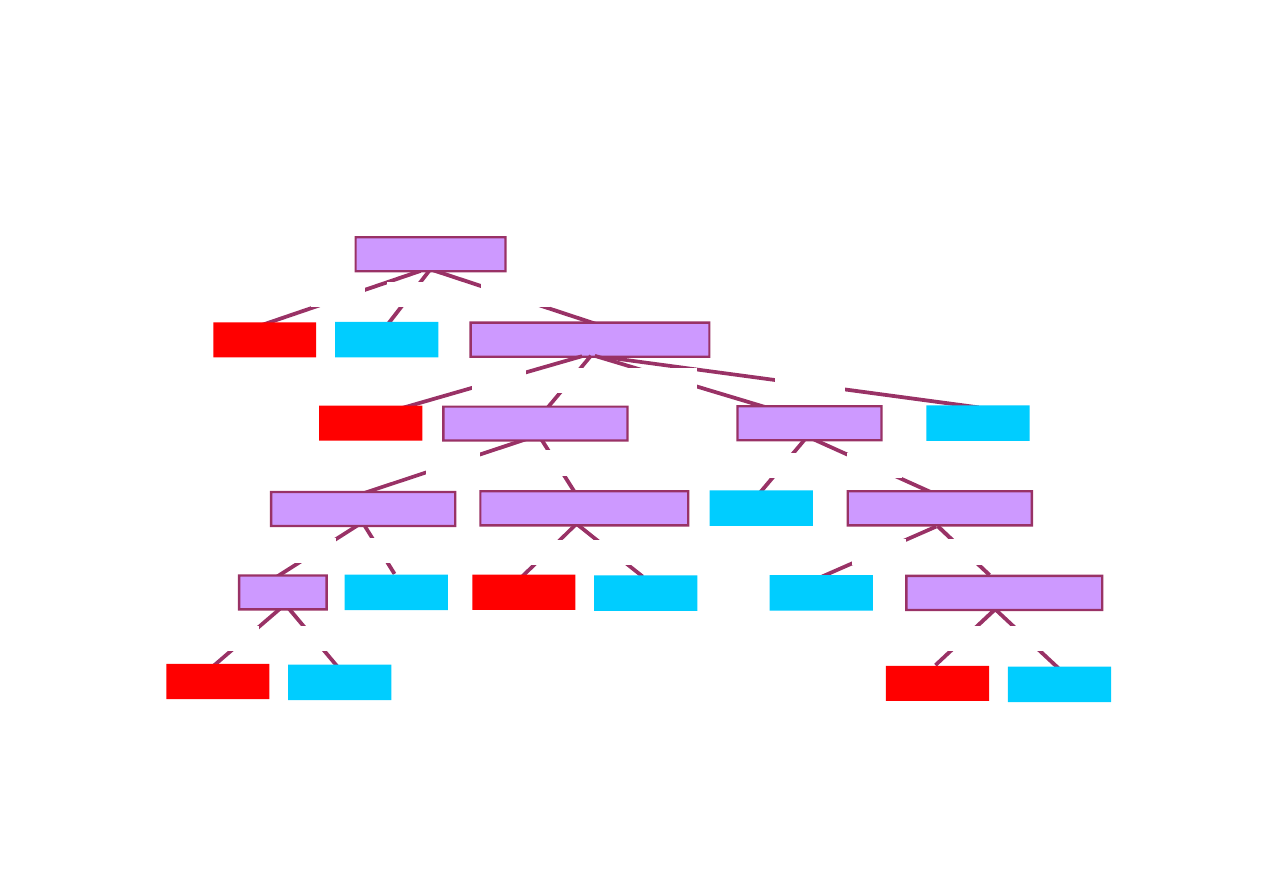
18.3. Uczenie drzew decyzyjnych
Drzewo decyzyjne
Drzewo decyzyjne dla zadania oczekiwania na stolik
w restauracji.
Klienci
CzasOczekiwania
Fałsz
Prawda
Brak
Kilku
Pełno
> 60
60-30
30-10
Alternatywa ?
Głodny?
Fałsz
0-10
Prawda
© F.A. Dul 2007
Rezerwacja ?
Pi
ą
tek/Sobota ?
PadaDeszcz ?
Bar ?
Nie
Tak
Fałsz
Prawda
Prawda
Fałsz
Prawda
Nie
Tak
Nie
Tak
Nie
Tak
Alternatywa ?
Prawda
Prawda
Fałsz
Prawda
Nie
Tak
Nie
Tak
Nie
Tak
Posta
ć
logiczna drzewa decyzyjnego
∀
s CzyCzeka
ć
(s)
⇔
⇔
⇔
⇔
( P
1
(s)
∨
P
2
(s)
∨
...
∨
P
m
(s) )
18.3. Uczenie drzew decyzyjnych
Ekspresyjno
ść
drzewa decyzyjnego
Drzewo decyzyjne mo
ż
e reprezentowa
ć
ka
ż
d
ą
funkcj
ę
atrybutów.
Funkcjom boolowskim lub wierszom tablic prawdy
odpowiadaj
ą
ś
cie
ż
ki do li
ś
ci.
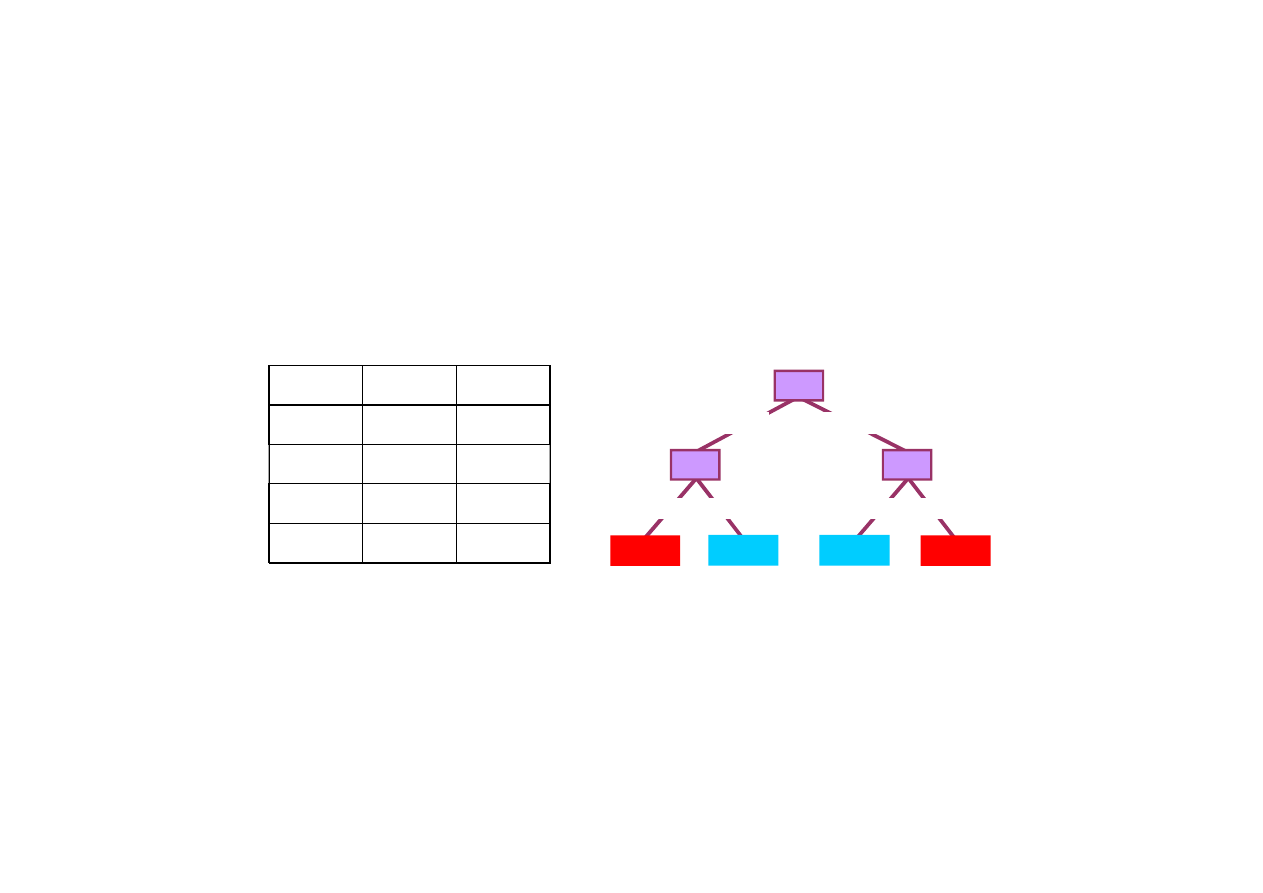
Przykład
Drzewo decyzyjne dla funkcji logicznej XOR (eXclusive OR)
A
Fałsz
Prawda
A
B
A xor B
Fałsz
Fałsz
Prawda
© F.A. Dul 2007
Dla ka
ż
dego zbioru ucz
ą
cego mo
ż
na zbudowa
ć
trywialne
zgodne drzewo decyzyjne z jedn
ą
ś
cie
ż
k
ą
do li
ś
cia dla
ka
ż
dego wzorca.
Takie drzewo nie mo
ż
e jednak by
ć
uogólnione dla nowych
wzorców i mo
ż
e by
ć
bardzo wielkie.
Mo
ż
na jednak zbudowa
ć
bardziej zwarte drzewa decyzyjne.
B
Fałsz
Prawda
Fałsz
Prawda
B
Fałsz
Prawda
Fałsz
Prawda
Fałsz
Prawda
Fałsz
Prawda
Fałsz
Fałsz
Prawda
Prawda
Prawda

18.3. Uczenie drzew decyzyjnych
Drzewa decyzyjne s
ą
efektywne dla pewnych zada
ń
, a dla
innych nie.
Nie ma ogólnej efektywnej reprezentacji dowolnej funkcji.
Uzasadnienie
Liczba wszystkich funkcji boolowskich z n atrybutami jest
równa liczbie opisuj
ą
cych je tablic prawdy.
Ka
ż
da tablica prawdy ma 2
n
wierszy.
Warto
ść
funkcji opisuje 2
n
cyfr (kolumna tablicy prawdy).
© F.A. Dul 2007
Warto
ść
funkcji opisuje 2
n
cyfr (kolumna tablicy prawdy).
Liczba ró
ż
nych funkcji jest zatem równa
2
2n
.
Ju
ż
dla n = 6 atrybutów boolowskich liczba funkcji jest
równa
18,446,744,073,709,551,616 ~ 10
19
.
Mo
ż
na jednak efektywnie budowa
ć
drzewa decyzyjne
dla wielu problemów o znaczeniu praktycznym.
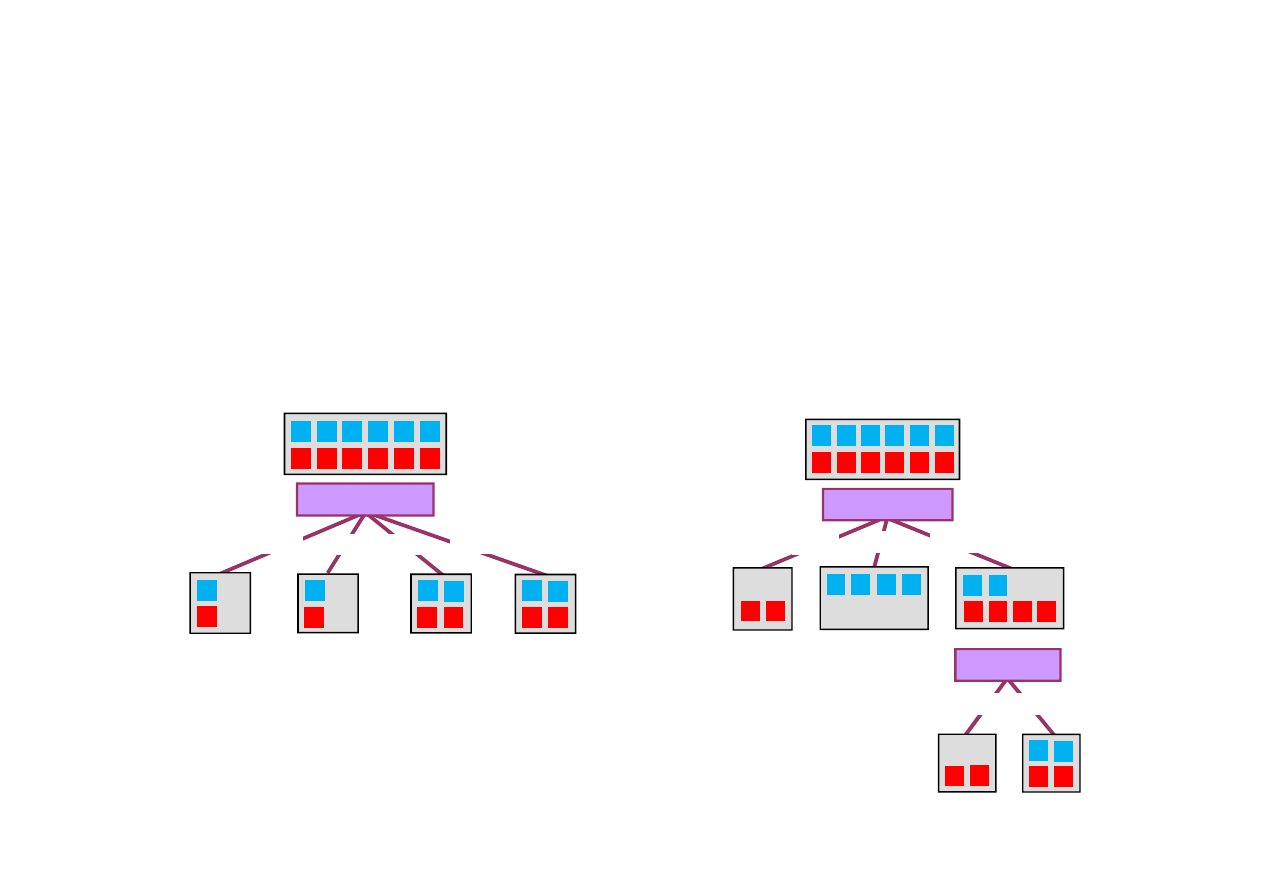
18.3. Uczenie drzew decyzyjnych
Uczenie drzewa decyzyjnego
Cel: zbudowa
ć
„małe” drzewo zgodne z wzorcami ucz
ą
cymi.
Idea: wybra
ć
rekursyjnie ”najwa
ż
niejsze" atrybuty jako
korzenie poddrzew.
1
3
4
6
8 12
1
3
4
6
8 12
Dobre atrybuty dziel
ą
zbiór wzorców na podzbiory które (w
przypadku idealnym) s
ą
w cało
ś
ci pozytywne lub negatywne.
Przykład
© F.A. Dul 2007
Włoska Tajska
2
5
7
9 10 11
6
10
4
2
8
11
Burger
Francuska
1
5
3
7
12
9
Rodzaj
Klienci
Brak
Kilku
Pełno
1
3
6
8
7 11
12
4
2
5
9 10
2
5
7
9 10 11
Nie
Tak
5
4
2
12
10
Głodny?
9
Rodzaj
jest złym atrybutem dziel
ą
cym,
gdy
ż
utworzone podzbiory s
ą
mieszane.
Klienci
s
ą
lepszym atrybutem jako korze
ń
drzewa, gdy
ż
dwa podzbiory s
ą
jednorodne.
18.3. Uczenie drzew decyzyjnych
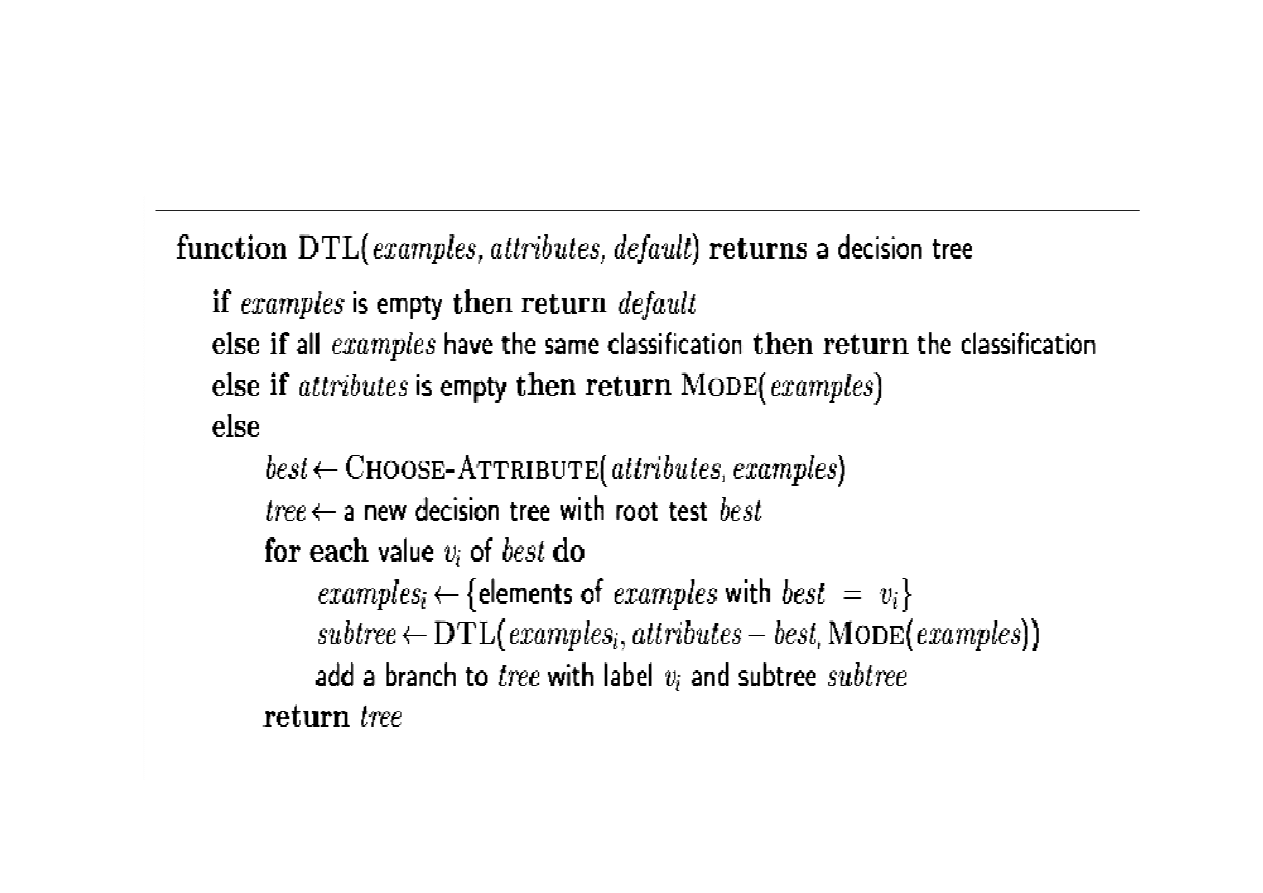
Algorytm uczenia drzewa decyzyjnego DTL (Decision Tree
Learning)
© F.A. Dul 2007

18.3. Uczenie drzew decyzyjnych
Wybór atrybutów na podstawie teorii informacji
Ocena zdolno
ś
ci atrybutu do efektywnego podziału zbioru
ucz
ą
cego mo
ż
e by
ć
przeprowadzona za pomoc
ą
poj
ę
cia
pojemno
ś
ci informacyjnej
(entropii):
∑
=
−
=
n
i
i
i
n
v
P
v
P
v
P
v
P
I
1
2
1
)
(
log
)
(
))
(
),...,
(
(
Dla zbioru ucz
ą
cego zawieraj
ą
cego p wzorców pozytywnych
i n wzorców negatywnych entropia jest równa:
© F.A. Dul 2007
n
p
n
n
p
n
n
p
p
n
p
p
n
p
n
n
p
p
I
+
+
−
+
+
−
=
+
+
2
2
log
log
)
,
(
i n wzorców negatywnych entropia jest równa:
bit
I
1
2
1
log
2
1
2
1
log
2
1
)
12
6
,
12
6
(
2
2
=
−
−
=
Przykład Dla zadania restauracyjnego mamy p = 6, n = 6,
zatem entropia jest równa
18.3. Uczenie drzew decyzyjnych
Wzmocnienie informacyjne
Je
ż
eli atrybut A dzieli zbiór ucz
ą
cy E na podzbiory E
1
, … , E
m
,
które zawieraj
ą
p
i
oraz n
i
wzorców pozytywnych i negatywnych
to ilo
ść
informacji potrzebna do klasyfikacji wzorców jest równa
Wzmocnienie informacyjne
(Information Gain, IG) lub
zmniejszenie entropii atrybutu A wynosi
∑
=
+
+
+
+
=
m
i
i
i
i
i
i
i
i
i
n
p
n
n
p
p
I
n
p
n
p
A
R
1
)
,
(
)
(
© F.A. Dul 2007
zmniejszenie entropii atrybutu A wynosi
Wybór atrybutów przy budowie drzewa decyzyjnego nast
ę
puje
w kolejno
ś
ci okre
ś
lonej warto
ś
ciami ich wzmocnienia
informacyjnego.
)
(
)
,
(
)
(
A
R
n
p
n
n
p
p
I
A
IG
−
+
+
=
18.3. Uczenie drzew decyzyjnych
Przykład
Warto
ś
ci wzmocnienia informacyjnego dla atrybutów Klienci
i Rodzaj s
ą
równe:
bitów
0541
.
)]
6
4
,
6
2
(
12
6
)
0
,
1
(
12
4
)
1
,
0
(
12
2
[
1
)
(
=
+
+
−
=
I
I
I
Klienci
IG
bitów
0
)]
4
2
,
4
2
(
12
4
)
4
2
,
4
2
(
12
4
)
2
1
,
2
1
(
12
2
)
2
1
,
2
1
(
12
2
[
1
)
(
=
+
+
+
−
=
I
I
I
I
Rodzaj
IG
© F.A. Dul 2007
Warto
ść
IG(Klienci) jest wi
ę
ksza ni
ż
IG(Rodzaj) i dlatego
atrybut Klienci zostanie wybrany przez algorytm Decision Tree
Learning jako korze
ń
drzewa decyzyjnego.
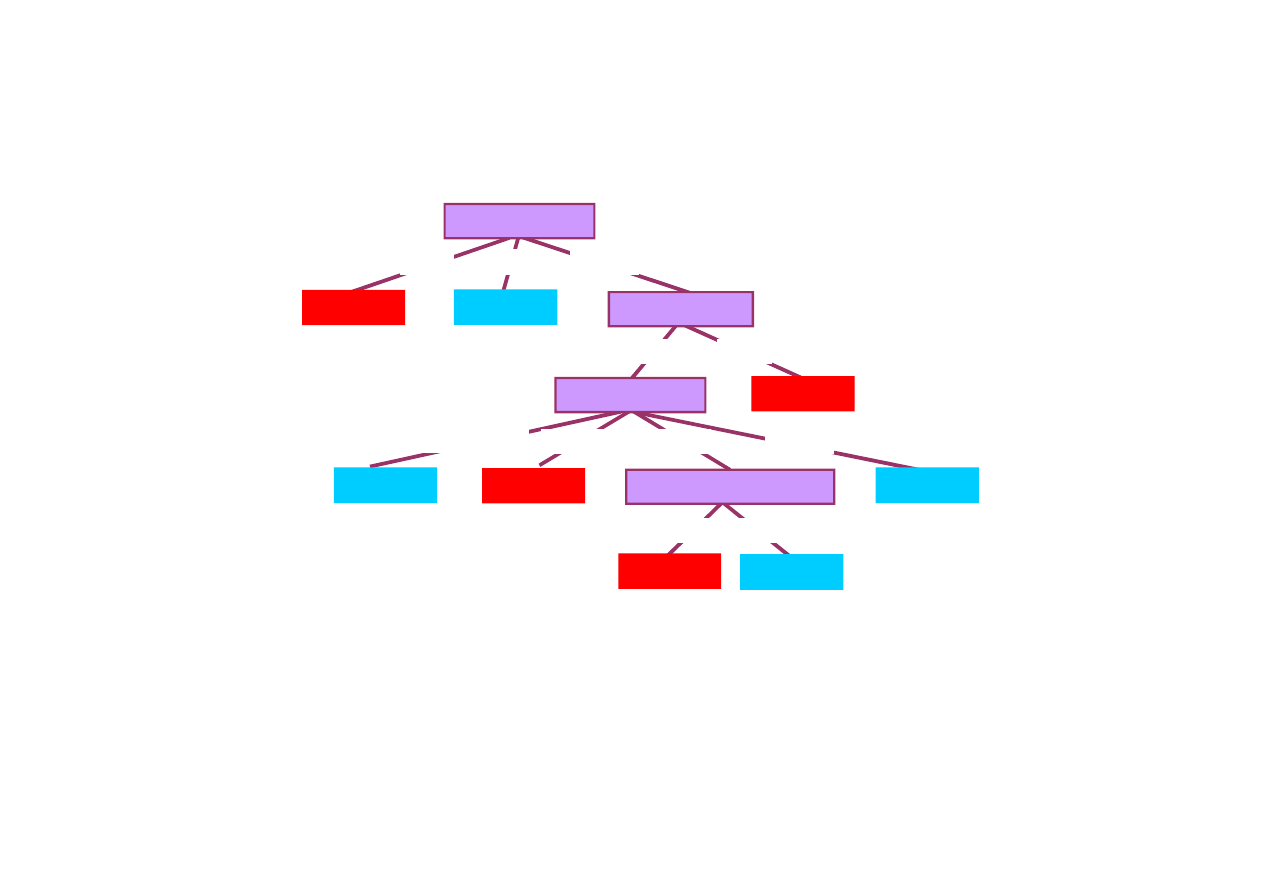
18.3. Uczenie drzew decyzyjnych
Nauczone drzewo decyzyjne
Drzewo decyzyjne nauczone na podstawie 12 wzorców.
Klienci
Fałsz
Prawda
Brak
Kilku
Pełno
Głodny?
Fałsz
Nie
Tak
Rodzaj
Francuska
Włoska
Tajska
Burger
© F.A. Dul 2007
Nauczone drzewo jest du
ż
o prostsze ni
ż
drzewo wyj
ś
ciowe.
Drzewo to ukazuje nieznan
ą
wcze
ś
niej własno
ść
- gotowo
ść
oczekiwania w weekendy na tajskie posiłki.
Drzewo odpowiadaj
ą
ce hipotezie h bli
ż
szej prawdziwej funkcji
f mo
ż
na uzyska
ć
na podstawie wi
ę
kszej ilo
ś
ci wzorców.
Pi
ą
tek/Sobota ?
Fałsz
Prawda
Nie
Tak
Fałsz
Prawda
Francuska
Włoska
Tajska
Prawda
Burger

18.3. Uczenie drzew decyzyjnych
Miara jako
ś
ci uczenia
Hipoteza h dobrze przybli
ż
a funkcj
ę
celu f je
ż
eli poprawnie
klasyfikuje wzorce nieznane wcze
ś
niej.
Metodologia oceny a posteriori jako
ś
ci uczenia:
• Zebra
ć
du
ż
y zbiór wzorców.
• Podzieli
ć
zbiór wzorców na
zbiór ucz
ą
cy
i
zbiór
testowy.
• Wyznaczy
ć
hipotez
ę
h za pomoc
ą
algorytmu ucz
ą
cego
© F.A. Dul 2007
• Wyznaczy
ć
hipotez
ę
h za pomoc
ą
algorytmu ucz
ą
cego
przy wykorzystaniu wzorców ze zbioru ucz
ą
cego.
• Wyznaczy
ć
udział poprawnie sklasyfikowanych
wzorców ze zbioru testowego przy u
ż
yciu hipotezy h.
• Powtórzy
ć
procedur
ę
dla zbiorów testowych o ró
ż
nych
wymiarach.
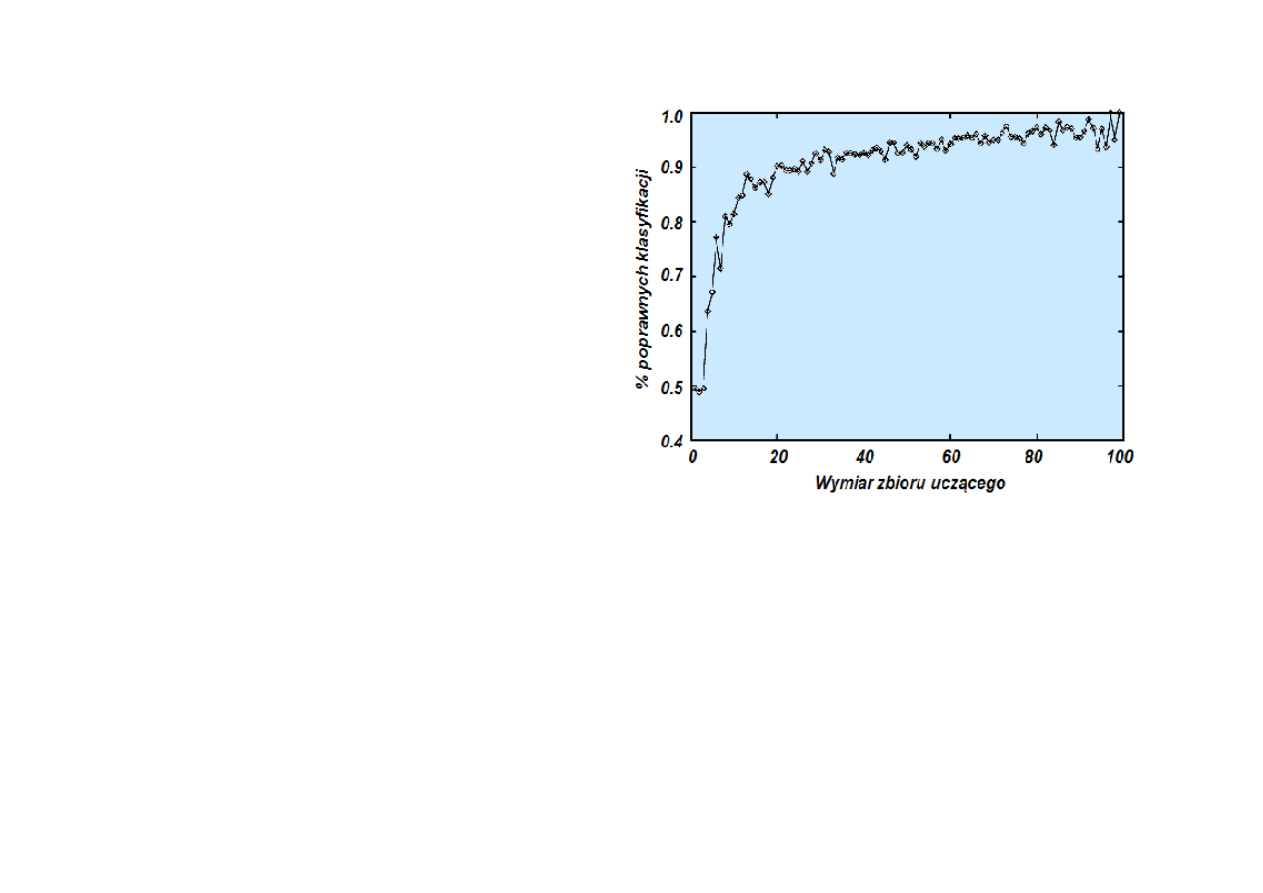
18.3. Uczenie drzew decyzyjnych
Krzywa ucz
ą
ca
obrazuje
udział poprawnych dopasowa
ń
wzorców ze zbioru testowego
w funkcji wymiaru zbioru
ucz
ą
cego.
Wraz ze wzrostem wymiaru
zbioru ucz
ą
cego wzrasta
stopie
ń
poprawno
ś
ci
klasyfikacji za pomoc
ą
hipotezy h.
© F.A. Dul 2007
hipotezy h.
Zagl
ą
danie
(peeking) jest bł
ę
dem uczenia polegaj
ą
cym
na „przeciekaniu” informacji ze zbioru testowego w trakcie
procesu nauczania.
Zagl
ą
danie powoduje spadek jako
ś
ci klasyfikacji za pomoc
ą
tak otrzymanej hipotezy.
Zagl
ą
daniu mo
ż
na zaradzi
ć
poprzez starann
ą
separacj
ę
zbiorów ucz
ą
cych i testowych.
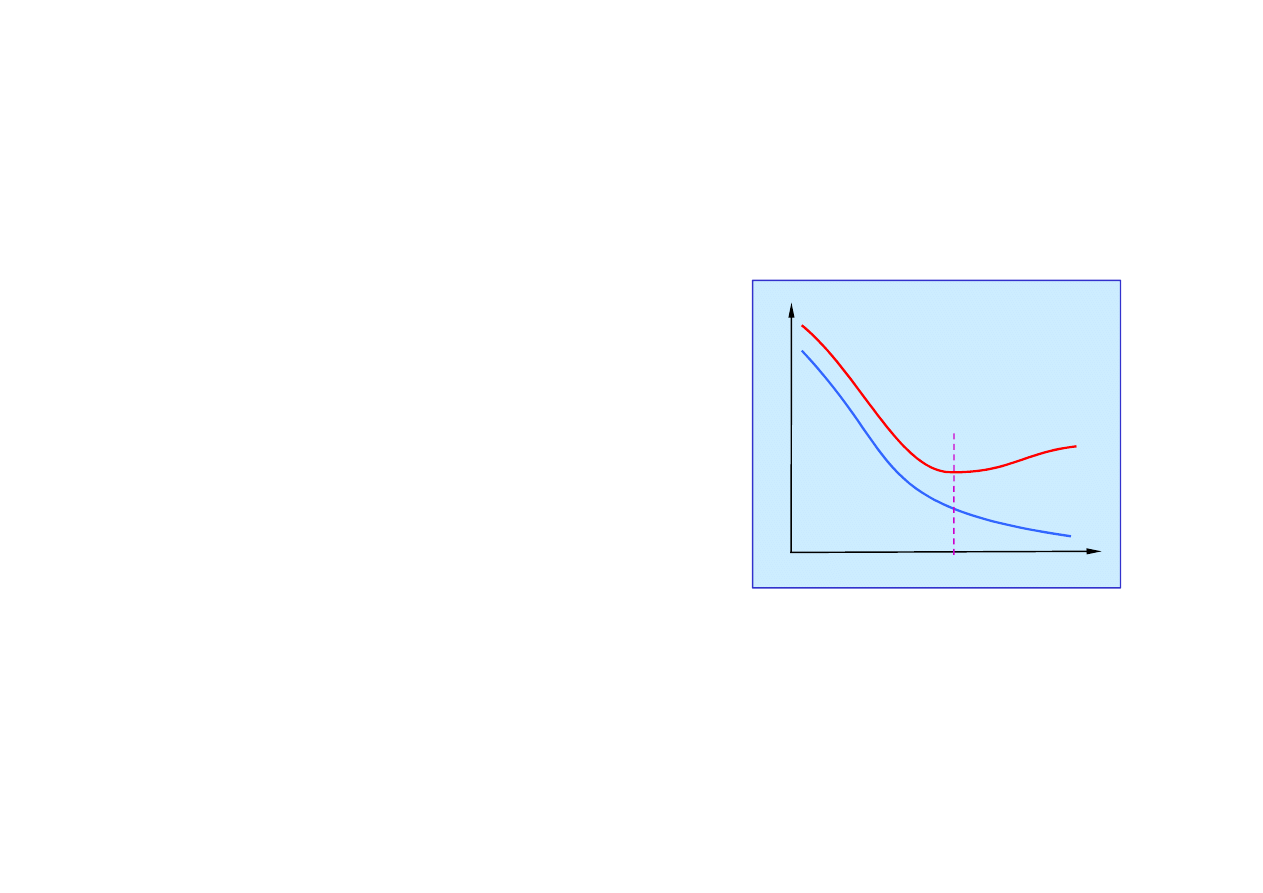
18.3. Uczenie drzew decyzyjnych
Przeuczenie (overfitting)
Gdy przestrze
ń
hipotez jest zbyt obszerna mo
ż
e wyst
ą
pi
ć
zjawisko
przeuczenia
.
Przeuczenie wyst
ę
puje najcz
ęś
ciej wtedy, gdy:
Pocz
ą
tek
przeuczenia
ε
• uczenie trwa zbyt długo,
• zbiór ucz
ą
cy jest za mały.
• u
ż
ywa si
ę
parametrów
nie zwi
ą
zanych przyczynowo
z funkcj
ą
celu.
© F.A. Dul 2007
n
Przy przeuczeniu bł
ą
d dopasowania
wzorców ze zbioru ucz
ą
cego spada,
za
ś
bł
ą
d dopasowania wzorców
ze zbioru testowego ro
ś
nie.
z funkcj
ą
celu.
Przeuczenia mo
ż
na unikn
ąć
przeprowadzaj
ą
c testy, np. wali-
dacji skro
ś
nej (cross-validation) czy wczesnego zako
ń
czenia.
Pozwalaj
ą
one stwierdzi
ć
, czy dalsze uczenie prowadzi
do otrzymania lepszych uogólnie
ń
.
Przeuczenie mo
ż
e wyst
ą
pi
ć
we wszystkich rodzajach uczenia.
18.4. Uczenie zespołowe
Uczenie zespołowe (ensemble learning) obejmuje zbiór hipotez.
Istota uczenia zespołowego polega na wyznaczeniu zbioru
hipotez a nast
ę
pnie ł
ą
czeniu wyników ich przewidywa
ń
.
Mo
ż
na zbudowa
ć
kilka drzew decyzyjnych na podstawie tego
samego (du
ż
ego) zbioru ucz
ą
cego i u
ż
y
ć
ich do klasyfikacji
poprzez
głosowanie
.
Głosowanie wi
ę
kszo
ś
ciowe umo
ż
liwia poprawienie jako
ś
ci
klasyfikacji, gdy
ż
prawdopodobie
ń
stwo bł
ę
dnej klasyfikacji
© F.A. Dul 2007
klasyfikacji, gdy
ż
prawdopodobie
ń
stwo bł
ę
dnej klasyfikacji
przez wi
ę
kszo
ść
drzew jest małe.
–
+
+
+
+
+
+
+
+
+
+
+
+
+
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
U
ż
ycie pi
ę
ciu hipotez zamiast jednej
redukuje prawdopodobie
ń
stwo bł
ę
dnej
klasyfikacji z 1/10 do 1/100.
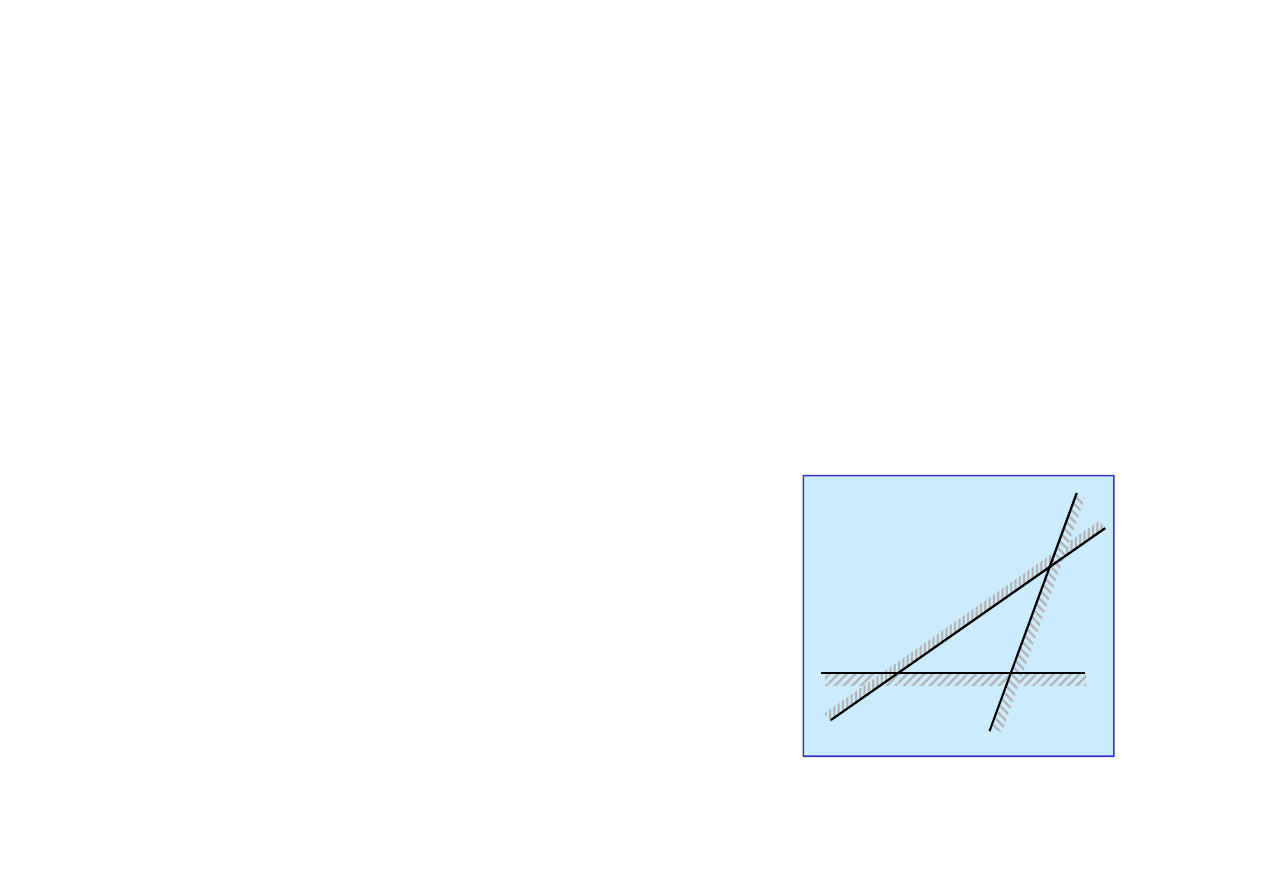
Uczenie zespołowe pozwala rozszerzy
ć
przestrze
ń
hipotez.
Trzy hipotezy pozwalaj
ą
kwalifikowa
ć
wzorce w obszarze, czego nie mo
ż
na
łatwo osi
ą
gn
ąć
przy pomocy pojedy
ń
czej hipotezy.

Najcz
ęś
ciej u
ż
ywan
ą
metod
ą
uczenia zespołowego jest
metoda wzmacniania (
boosting
).
18.4. Uczenie zespołowe
© F.A. Dul 2007

18.5. Obliczeniowa teoria uczenia
Dlaczego uczenie jest skuteczne?
Podstawowa zasada
obliczeniowej teorii uczenia:
Zła hipoteza zostanie prawie na pewno wykryta
na podstawie niewielkiej liczby przykładów ucz
ą
cych,
gdy
ż
jej przewidywania b
ę
d
ą
niewła
ś
ciwe.
Je
ż
eli hipoteza jest potwierdzona przez du
żą
liczb
ę
przykładów
ucz
ą
cych, to jest mało prawdopodobne aby była zła.
Taka hipoteza jest
prawdopodobnie w przybli
ż
eniu poprawna
© F.A. Dul 2007
Taka hipoteza jest
prawdopodobnie w przybli
ż
eniu poprawna
(probably approximately correct, PAC).
Algorytm PAC – algorytm ucz
ą
cy oparty na hipotezie PAC.
Zało
ż
enie podstawowe (o stacjonarno
ś
ci): zbiory ucz
ą
ce
i testowe s
ą
wybrane losowo i s
ą
niezale
ż
ne.
Zakłada si
ę
te
ż
,
ż
e przykłady ucz
ą
ce s
ą
typowe dla zadania
– nie s
ą
„dziwne” (np. trójkołowe samochody, itp.), gdy
ż
wówczas uogólnienia mog
ą
by
ć
niemiarodajne (np. przy
rozpoznawaniu samochodów).
18.5. Obliczeniowa teoria uczenia
Liczba przykładów ucz
ą
cych
Oznaczenia:
Bł
ą
d hipotezy h wzgl
ę
dem funkcji celu f
∈
H przy danym
zbiorze D jest to prawdopodobie
ń
stwo tego,
ż
e h ró
ż
ni si
ę
od f na pewnym przykładzie z D,
e(h) = P( h(x) ≠ f(x) | x
∈
D ).
• X – zbiór wszystkich mo
ż
liwych przykładów,
• D –
ź
ródło przykładów,
• H – zbiór mo
ż
liwych hipotez,
• N – liczba przykładów w zbiorze ucz
ą
cym.
© F.A. Dul 2007
e(h) = P( h(x) ≠ f(x) | x
∈
D ).
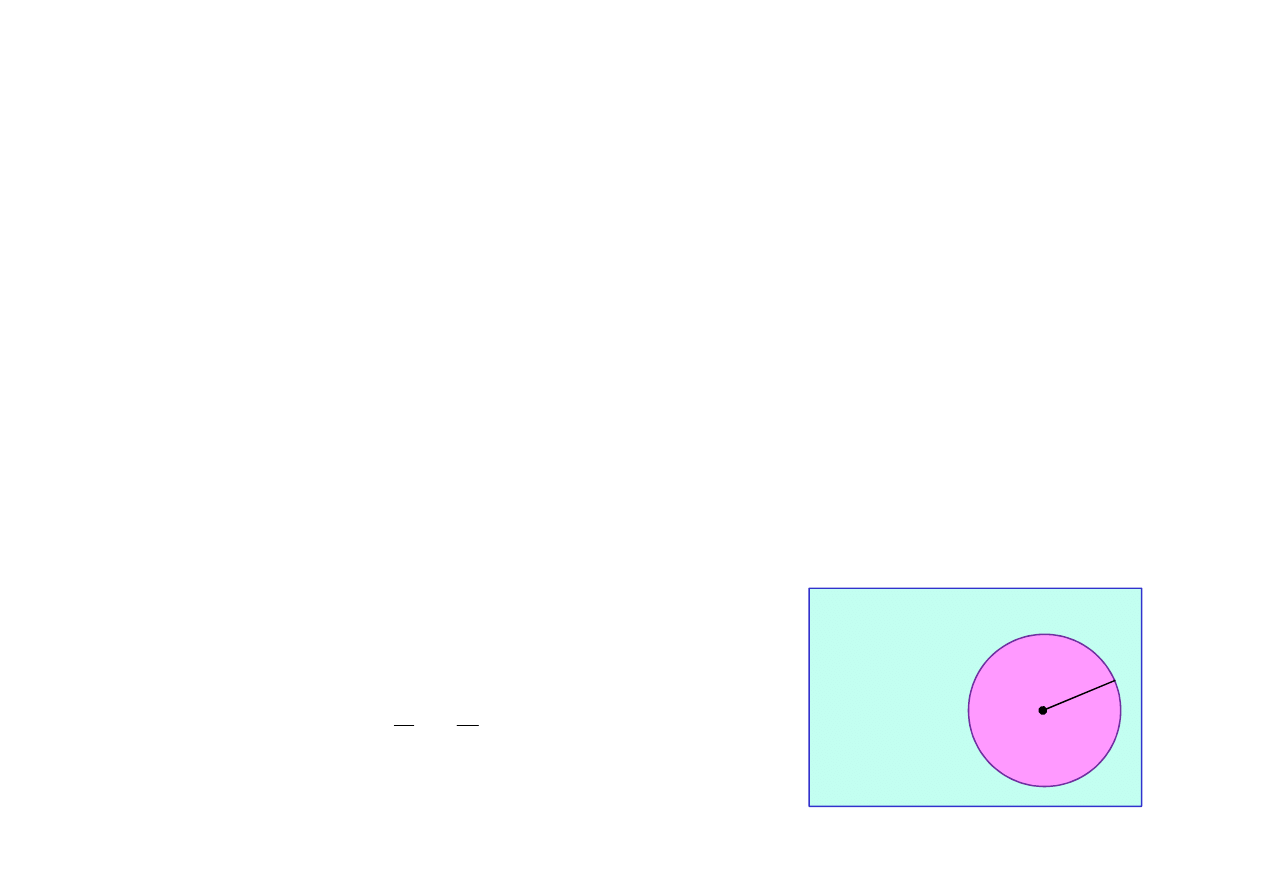
Hipoteza jest
poprawna w przybli
ż
eniu
, je
ż
eli
e(h) ≤
ε
,
ε
–
małe
.
Hipotezy zgodne le
żą
w kole o
ś
rodku w f i promieniu
ε
.
f
ε
H
H
złe
Liczba N przykładów ucz
ą
cych dla
których wszystkie hipotezy zgodne b
ę
d
ą
w przybli
ż
eniu poprawne jest równa
|)
|
ln
1
(ln
1
H
+
≥
δ
ε
N
1-
δ
– prawdopodobie
ń
stwo,
ż
e bł
ą
d
hipotezy jest mniejszy ni
ż
ε
.
Uczenie agenta indukcyjnego
Uczenie indukcyjne to w istocie aproksymacja funkcji
na podstawie danych do
ś
wiadczalnych.
Uczenie drzew decyzyjnych ma charakter
identyfikacji strukturalnej – buduje si
ę
struktur
ę
drzewa na podstawie danych.
Agent ucz
ą
cy si
ę
indukcyjnie jest „tabula rasa”
– nie wie niczego o
ś
wiecie i niczego nie pami
ę
ta.
©
F.A. Dul 2007
– nie wie niczego o
ś
wiecie i niczego nie pami
ę
ta.
Mo
ż
e on znacznie podwy
ż
szy
ć
efektywno
ść
i jako
ść
uczenia poprzez wykorzystanie wiedzy wiedzy
posiadanej a priori.
Bardziej zaawansowany agent b
ę
dzie zatem
wykorzystywał
uczenie z wiedz
ą
.

Podsumowanie
• Uczenie jest niezb
ę
dne przy niepewnym
ś
rodowisku.
• Agent ucz
ą
cy si
ę
= moduł decyzyjny + moduł ucz
ą
cy si
ę
.
• Uczenie przybiera wiele form zale
ż
nych od struktury agenta
i rodzaju ucz
ą
cego sprz
ęż
enia zwrotnego.
• Uczenie indukcyjne wykorzystuje wzorce ucz
ą
ce - zbiór par
wej
ś
cie i wyj
ś
cie.
• Uczenie funkcji dyskretnej to klasyfikacja, za
ś
funkcji ci
ą
głej
to regresja.
• Uczenie indukcyjne polega na znalezieniu hipotezy zgodnej
• Uczenie indukcyjne polega na znalezieniu hipotezy zgodnej
z danymi wzorcami.
• Brzytwa Ochkama sugeruje wybór hipotezy najprostszej.
• Identyfikacja modelu jest form
ą
uczenia indukcyjnego.
• Drzewo decyzyjne uczy si
ę
przy wykorzystaniu
wzmocnienia informacyjnego.
• Przeuczenie polega na nadmiernym dopasowaniu hipotezy
do wzorców i prowadzi do bł
ę
dnych klasyfikacji.
• Jako
ść
uczenia wyra
ż
a si
ę
dokładno
ś
ci
ą
wzorców mierzon
ą
na zbiorze testowym (innym ni
ż
zbiór ucz
ą
cy).
©
F.A. Dul 2007
Wyszukiwarka
Podobne podstrony:
18 Uczenie się na podstawie obserwacji
Na podstawie obserwacji pracy studenta oraz rozmow pohospitacyjnych stwierdza sie ze przygotowani
PDW na podstawie obserwacji pedagogicznej
8 Wyznaczenie częstości generatora na podstawie obserwacji dudnień i krzywych Lissajous2012
1-18-23Materiał opracowany na podstawie dostępnej literatury i odbytych wykładów, PRAWO KARNE
Uczenie się na pamięć wierszyków ortograficznych, ortografia
OII08 Wyznaczanie czestosci generatora na podstawie obserwacji dudnień i krzywych Lissajous
Uczenie się jako podstawowy proces rozwoju
8 Wyznaczenie częstości generatora na podstawie obserwacji dudnień i krzywych Lissajou
Modelowanie 2, Pojecie modelowania odnosi się do procesu uczenia się zachowań poprzez obserwowanie z
zał nr 6 oświadczenie członka rodziny rozliczającego się na podstawie przepisów o zryczałtowanym po
4 Wyznaczanie czestosci generatora na podstawie obserwacji dudnien i krzywych Lissajous, Fizyka spra
WPŁYW METOD UCZENIA SIĘ NA WYNIKI KSZTAŁCENIA WSPÓŁCZESNEJ MŁODZIEŻY
PDW na podstawie obserwacji pedagogicznej
Symptomy trudnosci w uczeniu sie na poszczegolnych przemdmiotach
Dostosowanie wymagań edukacyjnych do potrzeb uczniów ze specyficznymi trudnościami w uczeniu się na
Uczenie się to jedno z podstawowych funkcji umysłu polegające na zdobywaniu wiedzy i w?ekcie informa
18 Samokształcenie jako metoda uczenia się
więcej podobnych podstron