„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Janina Kleban
Obsługiwanie aparatury do pomiarów geofizycznych
311[11].Z3.03
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
doc. dr hab. inż. Grzegorz Mutke
dr inż. Marek Młyńczak
Opracowanie redakcyjne:
mgr Janina Kleban
Konsultacja:
mgr inż. Marek Olsza
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 311[11].Z3.03
„Obsługiwanie aparatury do pomiarów geofizycznych”, zawartego w modułowym programie
nauczania dla zawodu technik geofizyk.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1.
Wprowadzenie
3
2.
Wymagania wstępne
5
3.
Cele kształcenia
6
4.
Materiał nauczania
7
4.1.
Obsługiwanie aparatury do badań grawimetrycznych i magnetycznych
7
4.1.1.
Materiał nauczania
7
4.1.2.
Pytania sprawdzające
19
4.1.3.
Ć
wiczenia
19
4.1.4.
Sprawdzian postępów
20
4.2.
Obsługiwanie aparatury do badań geoelektrycznych i elektromagnetycznych 21
4.2.1.
Materiał nauczania
21
4.2.2.
Pytania sprawdzające
27
4.2.3.
Ć
wiczenia
27
4.2.4.
Sprawdzian postępów
29
4.3.
Obsługiwanie aparatury do badań sejsmicznych
30
4.3.1.
Materiał nauczania
30
4.3.2.
Pytania sprawdzające
44
4.3.3.
Ć
wiczenia
44
4.3.4.
Sprawdzian postępów
46
4.4.
Obsługiwanie aparatury do badań w otworach wiertniczych
47
4.4.1.
Materiał nauczania
47
4.4.2.
Pytania sprawdzające
59
4.4.3.
Ć
wiczenia
60
4.4.4.
Sprawdzian postępów
61
5.
Sprawdzian osiągnięć
62
6.
Literatura
66

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik ten będzie Ci pomocny w przyswajaniu wiedzy dotyczącej obsługiwania
aparatury do pomiarów geofizycznych.
W poradniku zamieszczono:
−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z poradnika,
−
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
−
materiał nauczania – wiadomości teoretyczne niezbędne do osiągnięcia założonych celów
kształcenia i opanowania umiejętności zawartych w jednostce modułowej,
−
zestaw pytań, abyś mógł sprawdzić, czy już opanowałeś określone treści,
−
ć
wiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
−
sprawdzian postępów,
−
sprawdzian osiągnięć, przykładowy zestaw zadań. Zaliczenie testu potwierdzi
opanowanie materiału całej jednostki modułowej,
−
literaturę uzupełniającą.
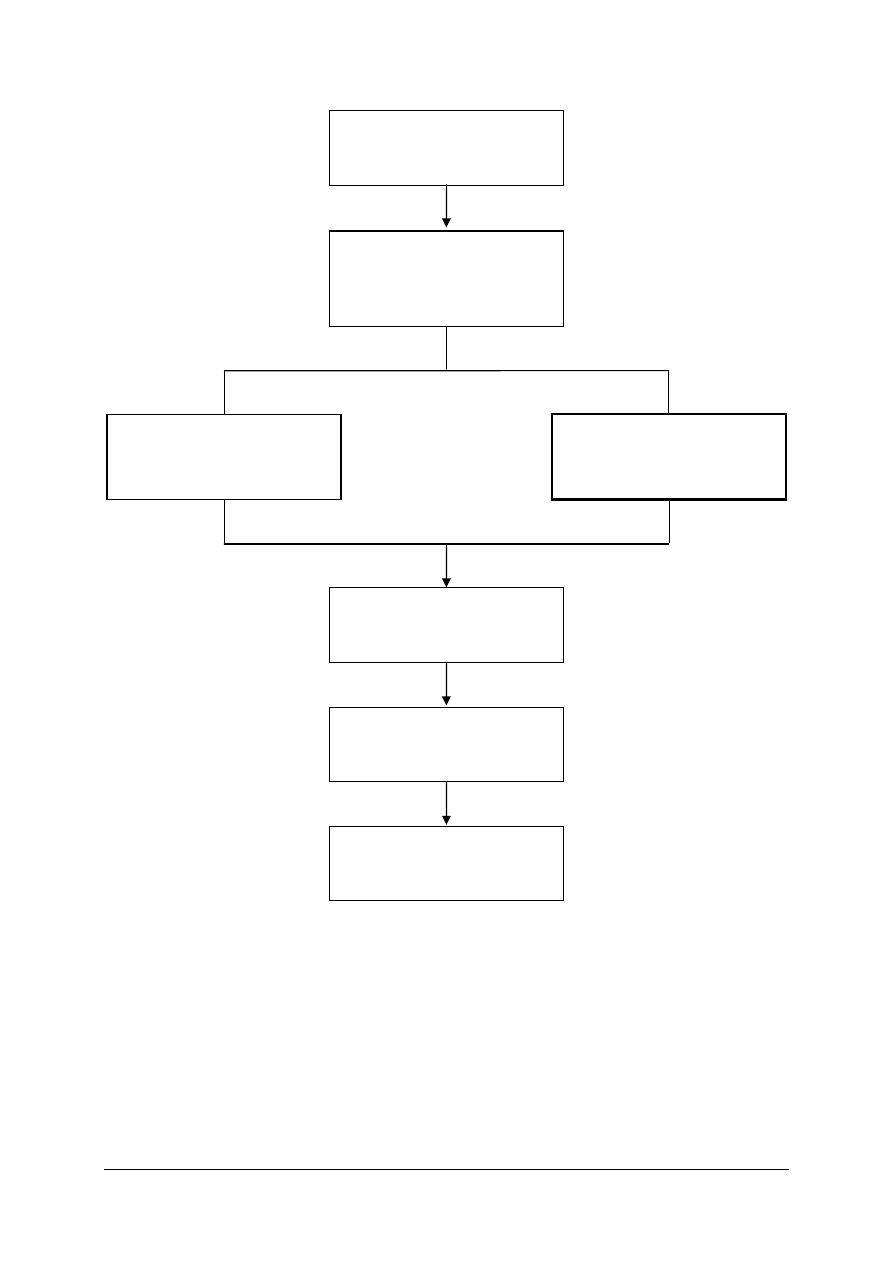
Miejsce jednostki modułowej w strukturze modułu 311[11].Z3 „Badania geofizyczne”
jest wyeksponowane na schemacie zamieszczonym na stronie 4.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów bhp
i instrukcji przeciwpożarowych, wynikających z rodzaju wykonywanych prac. Wiadomości
dotyczące przepisów bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz
ochrony środowiska znajdziesz w jednostce modułowej 311[11].O1.01 „Przestrzeganie
przepisów bezpieczeństwa i higieny pracy oraz ochrony środowiska”.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
Schemat układu jednostek modułowych
311[11].Z3
Badania geofizyczne
311[11].Z3.01
Analizowanie zmian
geofizycznych w strukturze
Ziemi
311[11].Z3.03
Obsługiwanie aparatury
do pomiarów geofizycznych
311[11].Z3.02
Planowanie i organizacja
badań geofizycznych
311[11].Z3.04
Wykonywanie badań
geofizycznych
311[11].Z3.05
Badanie właściwości
minerałów i skał
311[11].Z3.06
Sporządzanie dokumentacji
badań geofizycznych
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu nauczania jednostki modułowej powinieneś umieć:
−
stosować przepisy bezpieczeństwa i higieny pracy, ochrony środowiska i ochrony
przeciwpożarowej obowiązujące w pracowni i na stanowisku pracy,
−
korzystać z różnych źródeł informacji,
−
organizować stanowisko pracy zgodnie z wymogami ergonomii,
−
posługiwać się podstawowymi pojęciami z zakresu fizyki, takimi jak: masa, siła,
prędkość,
−
stosować podstawowe prawa fizyki z zakresu pola grawitacyjnego, elektrostatycznego,
magnetycznego,
−
posługiwać się dokumentacją geodezyjną,
−
posługiwać się dokumentacją geologiczną,
−
posługiwać się podstawowymi pojęciami topograficznymi,
−
stosować i zamieniać jednostki układu SI,
−
interpretować związki wyrażone za pomocą wzorów, tabel,
−
wykonywać proste obliczenia matematyczne,
−
użytkować komputer,
−
współpracować w grupie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
dokonać analizy schematów blokowych i ideowych aparatów geofizycznych,
−
odczytać schematy blokowe aparatury z użyciem symboli graficznych,
−
wyjaśnić budowę i zasady działania aparatury do pomiarów geofizycznych,
−
ocenić stan techniczny aparatury do pomiarów geofizycznych,
−
dobrać parametry pomiarów geofizycznych,
−
dobrać osprzęt pomiarowy,
−
ocenić stan techniczny osprzętu,
−
zlokalizować i usunąć przerwy w kablach oraz przygotować sondy do badań,
−
wyjaśnić budowę sond, geofonów, elektrod,
−
ocenić wpływ parametrów ustawienia geofonów, sond, elektrod na wyniki pomiarów
geofizycznych,
−
wyjaśnić zasady bezpiecznego użytkowania aparatury i sprzętu,
−
przygotować aparaturę i osprzęt do pomiarów,
−
wykonać pomiary w terenie,
−
wyjaśnić budowę i zasady działania aparatury do pomiarów fizycznych właściwości skał,
−
obsłużyć aparaturę do pomiarów fizycznych właściwości skał,
−
określić sposoby zabezpieczenia otworów do badań geofizycznych,
−
posłużyć się przyrządami elektrycznymi podczas badań geofizycznych,
−
dokonać drobnych napraw sprzętu,
−
wyjaśnić budowę i zasady działania urządzeń i sprzętu do wzbudzania sztucznych pól
fizycznych w Ziemi,
−
zabezpieczyć aparaturę i sprzęt przed uszkodzeniami w czasie pracy, przechowywania
i transportu,
−
zastosować przepisy dotyczące użytkowania materiałów wybuchowych i źródeł
promieniotwórczych,
−
zastosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz
ochrony środowiska.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1.
Obsługiwanie aparatury do badań grawimetrycznych
i magnetycznych
4.1.1. Materiał nauczania
Podstawową i najważniejszą częścią układu pomiarowego każdego grawimetru jest
element sprężysty. Może on być wykonany z metalu lub kwarcu. Odpowiednio do tego
wyróżnia się grawimetry metaliczne i grawimetry kwarcowe.
Zasada względnych pomiarów grawimetrami statycznymi
W przypadku pomiaru przyspieszenia siły ciężkości metodą statyczną obserwacje
dotyczą ustalenia położenia masy znajdującej się w stanie równowagi w systemie
pomiarowym instrumentu, gdzie działanie siły ciężkości na masę systemu równoważone jest
deformacją sprężyn pomiarowych lub kompensującego przesunięcie masy czujnika pola
magnetycznego w przypadku grawimetrów nadprzewodnikowych.
Deformację liniową sprężyny
∆
z wywołuje różnica wartości przyspieszenia siły ciężkości
∆
g między punktami pomiarowymi P1 i P2. Jeżeli masa pomiarowa spełnia warunek stałości
m = const, to w liniowym przybliżeniu otrzymuje się:
∆
g = g
2
– g
1
= K ·
∆
z = K(z
2
– z
1
),
przy czym K oznacza współczynnik skali, nazywany stałą kalibracyjną lub
współczynnikiem równania grawimetru. Ta idea wagi sprężynowej, służącej do pomiarów
zmian przyspieszenia, wykorzystana została w konstrukcji grawimetrów morskich
i grawimetru marki GS-3 zbudowanego w połowie XX w. przez A. Grafa.
W celu uniezależnienia się od wpływu zmian temperatury na pomiar, układ pomiarowy
umieszcza się w naczyniu Devara albo w termostacie.
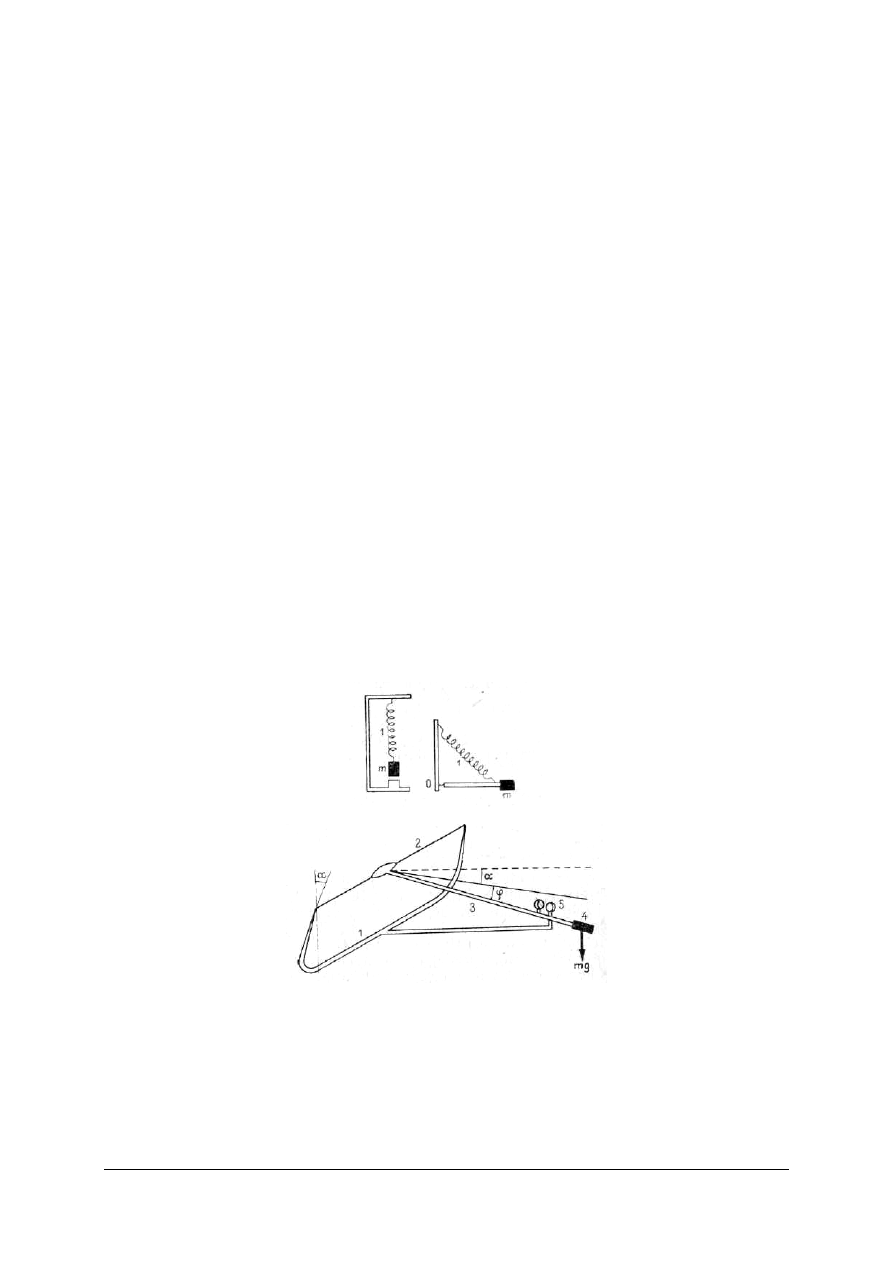
Rys. 1. Najprostsze schematy układów pomiarowych grawimetrów: 1 – sprężyna, m – masa obciążająca [9, s. 44]
Rys. 2. Schemat układu pomiarowego grawimetru: 1 – sztywna ramka, 2 – nić torsyjna, 3 – sztywne ramię,
4 – masa obciążająca ramię 3, 5 – zwierciadło [9, s. 44]
Natomiast zasada stosowania pomiaru kąta obrotu
∆α
ramienia systemu mierzącego przy
zmianie siły ciężkości wykorzystana została przy konstrukcji grawimetrów LaCoste
& Romberg. Elementy sprężyste wykonane są w kształcie sprężyn płaskich lub spiralnych.
Odczyt skali grawimetru wykonywany jest na zasadzie „zerowania wskazań” instrumentu.
Ś
rubą pomiarową licznika grawimetru doprowadza się ramię systemu mierzącego do
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
położenia wyjściowego, najczęściej poziomego, na każdym stanowisku. Skala w okularze
(woltomierza, czujnika elektronicznego) służy do ustalania położenia wskaźnika w położeniu
„zerowym” skali.
Zarówno liniowe, jak i obrotowe systemy mierzące mogą być astatyzowane lub
nieastatyzowane (ástatos po grecku oznacza niestały). W systemach „sprężynowo
astatyzowanych” efekt zwiększenia czułości uzyskuje się przez zainstalowanie dodatkowej
sprężyny, która zwiększa efekt zmian przyspieszenia siły ciężkości we wskazaniach
grawimetru.
Rys. 3. Grawimetr LaCoste-Romberg [14]
Przy budowie systemu pomiarowego grawimetru marki LaCoste & Romberg
z nieliniowym momentem sił sprężystych sprężyny astatyzującej zastosowano klasyczną już
dzisiaj astatyzację przez umieszczenie nachylonej (ukośnej) sprężyny głównej. Konstruktor
grawimetru L. J. LaCoste zastosował sprężynę o „zerowej” długości, której działanie
astatyzujące znacznie powiększa obrót masy próbnej. Produkcja takiej sprężyny polega na
skręcaniu nici w czasie nawijania na formę walcową. Sprężyna stwarza możliwość
symetrycznych obrotów
∆α
ramienia systemu pomiarowego względem położenia
wyjściowego. Sposób rejestracji deformacji czujnikowych elementów systemu mierzącego
pozwala wyróżnić grawimetry z optycznym urządzeniem do obserwacji wskaźnika położenia
masy lub z systemem elektrycznym. Współcześnie produkowane grawimetry precyzyjne
posiadają fotoelektryczne systemy rejestracyjne. Wykorzystuje się przy tym zmiany prądu
z fotokatody wywołane zmianami deformacji systemu pomiarowego.
Od 1987 r. firma Scintrex Co. produkowała grawimetry Autograv CG-3, a od 2004 –
Autograv CG-5, sprzężone z wbudowanymi mikrokomputerami. Jako przenośny system
pozyskiwania i kontroli danych zastosowano konsolę sterującą. System pomiarowy wykonany
jest z kwarcu i pracuje w myśl zasady sejsmografu Golicyna. Masa próbna zawieszona jest na
sprężynach kwarcowych, przemieszcza się przy zmianie przyciągania w polu elektrycznym
między okładkami kondensatora. Zmiany pojemności elektrycznej przetwarzane są przez
przetwornik pojemnościowo-przemieszczeniowy i rejestrowane automatycznie. Przetwornik
ma rozdzielczość równą 0,2 nm. Układ sprzężenia zwrotnego przesuwa masę do pozycji
wyjściowej (zerowej). Zmiany napięcia – równoważne zmianom grawitacji – transmitowane
są do systemu zbierania danych i przetwarzane na sygnał cyfrowy do licznika. Jego
wskazania wyświetlane są na ekranie z ciekłego kryształu – w wersji CG-3M (microGal
resolution) z precyzją do 0,01
µ
m·s
-2
. Komputer grawimetru (48kb RAM) może zapamiętać
odczyty na ok. 450 stanowiskach.
Przed pomiarem do pamięci komputera za pomocą klawiatury (14 dwufunkcyjnych
klawiszy) wprowadza się współrzędne stanowiska. Komputer ma zegar kwarcowy, który
wspomaga automatyczną eliminację liniowej części dryftu. Również automatycznie
uwzględniany jest wpływ przyciągania Słońca i Księżyca. Szybkość zmian czasowych
odczytu programuje się po zbadaniu grawimetru przed rejsem pomiarowym. Można także
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
zaprogramować korektę termiczną wskazań. Ponadto naczynie próżniowe z sensorem
grawitacyjnym, zespół elektroniczny i sensor pochylenia instrumentu umieszczone są
w podwójnie termostatyzowanym pojemniku. Grawimetr nie ma mechanicznej kompensacji
zmian temperatury. Kompensacja następuje za pomocą podzespołów elektronicznych.
Instrument pracuje w zakresie temperatur od -40° do +45°C. Ma dwie libele elektroniczne
o czułości ok. 1˝. Automatyczna korekcja błędów poziomowania jest wykonywana w zakresie
+200˝. Układ elektroniczny ma własny system autokalibracji wewnętrznej. Natomiast
wartości współczynników w równaniu grawimetru są wprowadzane do pamięci komputera.
Pomiar odbywa się poprzez rejestrację położenia masy próbnej co sekundę w okresie
zaprogramowanym przez obserwatora. Obserwator może również włączyć elektroniczny filtr
sejsmiczny, eliminujący sygnały znacznie odbiegające od przeciętnej w próbkowaniu
grawitacji. Wyświetlona zostaje średnia ciężkość referencyjna z całego okresu próbkowania,
poprawiona ze względu na pływy grawitacyjne, nachylenie systemu i liniową część dryftu.
Jeżeli odczyt i dziewięć innych zmiennych (średni moment obserwacji, poprawka pływowa,
nachylenia w dwóch prostopadłych kierunkach, nr stanowiska, nr obserwatora, wskazania
termometru, liczba próbek wziętych do średniej, liczba próbek odrzuconych i odchylenie
standardowe) zostanie wprowadzonych do pamięci komputera, to po zakończeniu pomiarów
istnieje możliwość ich transmisji do PC przez telefon lub modem i wydruku w formie
dziennika obserwacji. Możliwy jest również wydruk daty i innych wprowadzonych danych
o stanowisku. Grawimetr ma zasięg ok. 70 000 µm·s
-2
, nie wymaga przestawiania zakresu na
całym globie. Jego wymiary to: 0,24×0,31×0,32 m, a masa z akumulatorem – blisko 11 kg.
Nie ma aretażu systemu pomiarowego. W Polsce (a także m.in. w Chinach i Jordanii)
używano grawimetru Autograv CG-3M do pomiaru części podstawowej sieci
grawimetrycznej kraju.
Najszerzej stosowane są obecnie grawimetry z systemem pomiarowym, w którym masa
ma możliwość obrotu wokół osi. System ma więc jeden stopień swobody. W chwili, gdy
system znajduje się w równowadze, suma wszystkich sił równa jest zeru. Jeśli moment inercji
systemu jest M(
α
), to moment sił zewnętrznych wynosi g·M(
α
). Moment sił wewnętrznych,
sprężystych, przeciwdziałających zmianom ciężkości wynosi N(
α
). Równanie równowagi
systemu pomiarowego grawimetru będzie przedstawiało się następująco:
gM(
α
) + N(
α
) = 0
Do sił zewnętrznych zalicza się wpływ temperatury t, ciśnienia atmosferycznego B,
zmian przyspieszenia g i kąta
β
nachylenia osi obrotu ramienia masy próbnej. Moment siły
sprężystości materiału, z którego wykonany jest system mierzący, zależy od stopnia
deformacji układu, od temperatury wewnętrznej, a także od czasu
τ
, który upłynął od
wyprodukowania i uruchomienia grawimetru, czyli od „wystarzenia” systemu.
Grawimetr jest tym wyższej jakości im wyższą posiada czułość i im mniej wskazania
grawimetru zależą od zmian temperatury i ciśnienia atmosferycznego. Obsługę ułatwia mała
zależność wskazań od kąta pochylenia, ponieważ instrument taki wymaga mniej dokładnego
poziomowania i mniej dokładnej rektyfikacji libel.
Opracowanie wyników pomiarów grawimetrami statycznymi jest prostsze niż
w przypadku grawimetrów dynamicznych. Niewątpliwą wadą tego rodzaju grawimetrów jest
większy chód (dryft), czyli zmiana odczytów z upływem czasu (również bez zmiany miejsca
pomiaru), w porównaniu z chodem aparatu dynamicznego. Wymaga to ograniczenia czasu
trwania rejsu pomiarowego do kilku godzin i prawidłowego modelowania poprawek
chodowych. Grawimetry statyczne wymagają też kalibracji (skalowania, cechowania). Mają
zazwyczaj ograniczony zasięg pomiarowy (tzw. zakres). Zależnie od przeznaczenia waha się
on w granicach od kilkunastu
µ
m·s
-2
(grawimetry małozakresowe) do kilku tysięcy
µ
m·s
-2
(grawimetry szerokozakresowe, geodezyjne). W zasadzie z powiększeniem zakresu
grawimetru maleje dokładność pomiaru
∆
g.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Zmiany równania grawimetru spowodowane są zmianą szerokości geograficznej (ściślej
– zmianą przyspieszenia siły ciężkości) i występują przede wszystkim po zmianie zakresu
w grawimetrach małozakresowych. Cechowanie (skalowanie, kalibrowanie, komparacja)
grawimetru polega na ustaleniu związku między zmianą przyspieszenia siły ciężkości
∆
g
a zmianą odczytu
∆
S instrumentu. Przy wyznaczaniu współczynnika (stałej) K grawimetru
statycznego należy uwzględnić temperaturę przyrządu, upływ czasu między powtórnymi
obserwacjami na stanowisku wyjściowym (czyli chód grawimetru), wpływ sił pływowych,
nieliniowość równania grawimetru, zmiany ciśnienia atmosferycznego i inne systematyczne
czynniki. W zależności od sposobu realizacji wzorcowej wartości
∆
g służącej do obliczenia
stałej w myśl wzoru:
S
g
K
∆
∆
=
Rozróżnia się kilka metod skalowania, a mianowicie:
−
cechowanie (kalibracja) na bazach grawimetrycznych,
−
cechowanie przez nachylanie na egzaminatorze,
−
skalowanie przez przybliżanie do ciężaru,
−
kalibracja przez obciążanie dźwigni systemu mierzącego.
Odcinek bazy grawimetrycznej wybrany do skalowania grawimetru powinien rozciągać
się w kierunku południkowym na długości obejmującej badany fragment terenu, by następnie
pomiar różnic przyspieszenia wykonać bez przestawiania zakresu.
W 1968 r. W. Prothero i J. Goodkind zbudowali w San Diego (USA) pierwszy grawimetr
statyczny, którego zasada działania wykorzystuje zjawisko nadprzewodności metali.
Konstrukcja instrumentu polega na zamianie siły mechanicznej podtrzymującej element
pomiarowy grawimetru w położeniu równowagi na siłę pola magnetycznego. Jest to możliwe
wtedy, gdy element ten wykonany jest z nadprzewodnika i umieszczony zostanie w stałym
polu magnetycznym. Przebieg linii sił tego pola dobierany jest w zależności od kształtu
próbnika w taki sposób, by linie sił indukcji nie przenikały do jego wnętrza. Oddziaływanie
występujące między stałym polem magnetycznym a prądami wirowymi na powierzchni
elementu pomiarowego nosi nazwę zjawiska Meissnera-Ochsenfelda. Jego istota polega na
tym, że prądy wirowe na powierzchni nadprzewodnika wytwarzają pole magnetyczne, które
zupełnie kompensuje działanie zewnętrznego pola magnetycznego w elemencie pomiarowym.
Prądy wirowe zanikają, czyli linie sił zewnętrznego pola magnetycznego nie mogą przeniknąć
do wnętrza próbnika. Jeżeli naprzewodzący element pomiarowy umieszczony zostanie w polu
magnetycznym i ochłodzony do temperatury krytycznej (ok. 6°K), przy której następuje
przemiana fazowa w stan nadprzewodności, to pole magnetyczne w tym momencie zaniknie
w bryle próbnika.
We wnętrzu naczynia próżniowego znajduje się próbnik z nadprzewodnika w kształcie
sfery. Pole magnetyczne zewnętrzne wytwarzane jest przez prąd elektryczny przepływający
przez solenoidy wykonane z nadprzewodnika. Sfera lewituje między dwoma magnesami,
umieszczonymi w pionie nad i pod sferycznym próbnikiem. Zmiana siły ciężkości wywoła
zmianę położenia sfery i zmianę pojemności elektrycznej między sferą i magnesami.
Specjalny czujnik przetwarza zmianę pojemności na impuls elektryczny i przesuwa sferę
w położenie wyjściowe przez elektromagnetyczny układ sprzężony (zwrotny). Zmiany
natężenia na kondensatorze sprzężenia zwrotnego są miarą zmian przyspieszenia siły
ciężkości. Grawimetr ma dryft ok. 0,01
µ
m·s
-2
na miesiąc i nie wymaga kalibracji. Do połowy
lat 90. wykorzystywano grawimetry nadprzewodnikowe jako instrumenty stacjonarne tylko
do rejestracji pływowych zmian siły ciężkości i wpływu ruchu biegunów Ziemi na grawitację.
Firma amerykańska GWR Instruments z San Diego od 1995 r. produkuje precyzyjne,
przenośne (waga ok 15 kg, rozmiary: 60 cm wysokości, 30 cm średnica) grawimetry
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
nadprzewodnikowe. Pojemnik chłodzący takiego instrumentu zawiera ciekły hel. Wymiana
8 litrów helu musi następować co 7 dni. Dryft instrumentu jest nie większy niż 0,01
µ
m·s
-2
na
tydzień, a powtarzalność odczytów – ok. 0,001
µ
m·s
-2
. W grawimetry tego typu wyposażone
są liczące się na świecie obserwatoria pływowe. W 1997 r. zainstalowano do monitorowania
pływów ziemskich w obserwatorium satelitarno-geodynamicznym w Wettzell (Niemcy)
grawimetr nadprzewodnikowy GWR marki CD z dwiema sferami lewitującymi. Jego system
pomiarowy posiada dwa nadprzewodzące czujniki grawitacyjne. Średnica każdej ze sfer
wynosi 1 cal = 2,54 cm. Temperatura we wnętrzu termosu jest utrzymywana w granicach do
3,2 K. Dryft tego grawimetru nie przekracza ok. 65 nm·s
-2
/rok.
Zasada pomiarów grawimetrami balistycznymi
Pierwsze precyzyjne pomiary balistycznymi grawimetrami absolutnymi datuje się od lat
60. XX w. Od tego czasu stosuje się w grawimetrii aparaty wykorzystujące rzut pionowy ciała
w próżni.
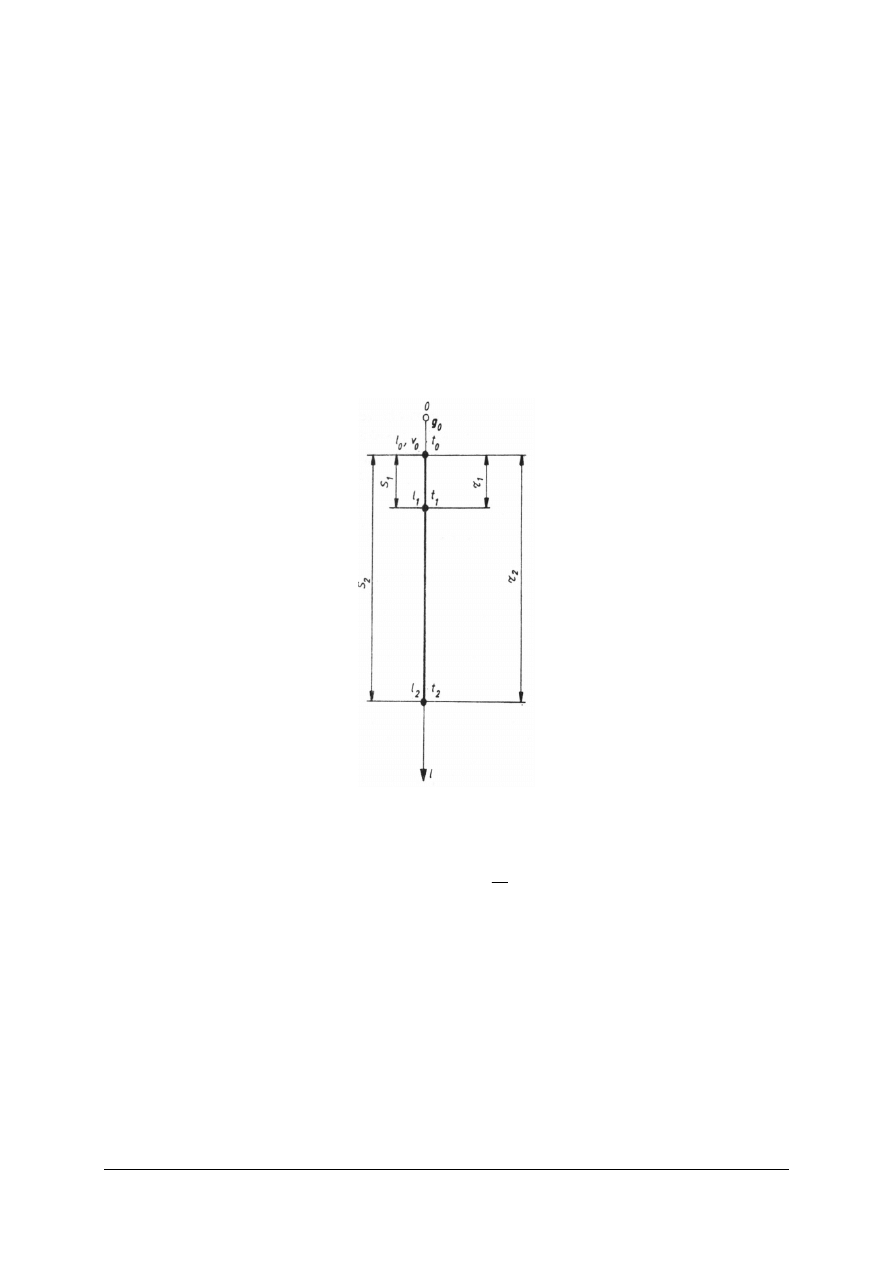
Rys. 4. Schemat układu pomiarowego grawimetru balistycznego [14]
Ruch jednostajnie przyspieszony pod działaniem stałego przyspieszenia siły ciężkości g
0
ujęty jest równaniem ruchu, które przyjmuje postać:
2
2
0
0
0
t
g
t
v
l
l
+
+
=
Ruch ciała obserwuje się na odcinku o długości do 1 m, a wymagany współcześnie
względny błąd średni wyznaczenia przyspieszenia to 10
-9
. Dlatego należy uwzględniać
zmiany przyspieszenia ziemskiego wzdłuż całej trajektorii.
Rozróżnia się symetryczne i niesymetryczne sposoby rejestracji. Symetryczny sposób
polega na obserwacji ruchu ciała najpierw pionowo w górę, a następnie, po osiągnięciu
górnego wierzchołka toru, spadającego swobodnie. Pomiar drogi i czasu wykonywany jest na
symetrycznych względem wierzchołka częściach trajektorii. Niesymetryczny pomiar
absolutnej wartości przyspieszenia to obserwacje jedynie swobodnego spadku ciała w rurze
próżniowej. Z niezbędną dokładnością mierzy się odległości między poziomami rejestracji
przy użyciu interferometru laserowego Michelsona.
Do pomiarów balistycznych sposobem niesymetrycznym służył aparat skonstruowany
przez J.E. Fallera i J.A. Hammonda z University Vesli, Princeton, USA. Pomiar pojedynczy
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
rejestrował długości drogi pryzmatu na odcinku ok. 1 m. Aparat ten zbudowany został
w latach 1968–69, uznawany jest obecnie za instrument pierwszej generacji.
W 1981 r. w Joint Institute for Laboratory Astrophysics (JILA), National Bureau of
Standards and University of Colorado (USA) wykonano pierwsze pomiary aparatem Fallera,
który jest aparatem tzw. trzeciej generacji. Przy jego konstrukcji wykorzystano zasadę
swobodnego spadku pryzmatu. Źródło światła stanowi w tym instrumencie laser
stabilizowany zaprojektowany przez Zeemana. Kontrola częstotliwości zapewniona jest
w instrumencie JILA przez rubidowy atomowy zegar. Grawimetr ten odróżnia się od
wcześniejszych konstrukcji nowym urządzeniem próbnika opuszczanego w rurze próżniowej
oraz inną izolacją od długookresowych wibracji podstawy i gruntu. Ciało spadające,
w kształcie czworościanu z kryształu, umieszczone jest w pojemniku próżniowym, który
również opada w aluminiowej rurze zewnętrznej. Droga próbnika wynosi ok. 20 cm. Ma on tę
właściwość, że odbija promień padający na podstawę ściśle równolegle. W przypadku obrotu
pryzmatu wokół dowolnej osi, przechodzącej przez punkt wewnątrz bryły, zwany środkiem
optycznym, nie pojawia się różnica dróg optycznych, czyli tzw. chód optyczny przyrządu.
Pod koniec lat 90. firma amerykańsko-kanadyjska MICRO-g SOLUTIONS Inc.
rozpoczęła produkcję małego grawimetru absolutnego FG5-L z konstrukcją podobną do
uproszczonego rozwiązania zastosowanego w FG-5. Ma on masę tylko ok. 60 kg. Rura
próżniowa ze statywem ma wysokość ok. 70 cm. Z serii pomiarów trwającej 10 minut
otrzymuje się absolutne przyspieszenie ziemskie z błędem do 0,5 µm· s
-2
. Powtarzalność
wyników na stanowisku szacowana jest na 0,1 µ m·s
-2
.
Rys. 5. Uruchamianie grawimetru FG-5 w obserwatorium PW w Józefosławiu pod Warszawą [fot. P. Jakubicka, 14]
Rys. 6. Grawimetr absolutny prof. Zbigniewa Ząbka (fot. archiwum Instytutu Geodezji Wyższej i Astronomii
Politechniki Warszawskiej [14]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Przy symetrycznym sposobie obserwacji przyspieszenia ziemskiego w aparacie
balistycznym rejestruje się interwały T i t między momentami przejścia wyrzucanego
pionowo ciała odpowiednio przez pary: dolna i górna stacja, na częściach trajektorii
symetrycznych względem jej wierzchołka. Odstęp H między poziomami rejestracji jest ściśle
wyznaczony interferencyjnie.
W 1977 r. przystąpiono przy jego użyciu do pomiarów na punktach podstawowej osnowy
grawimetrycznej w zachodniej Europie. Skala długości w tym instrumencie jest określana na
podstawie długości fali helowo-neonowego lasera kontrolowanej z błędem rzędu 5·10
-9
.
Licznik prążków interferencyjnych i dwa liczniki sygnałów czasu emitowanych przez
rubidowy wzorzec mają stabilność 10
-10
na 10 dób. Ruch próbnika odbywa się w próżni
o ciśnieniu 0,1 hPa. Masa całego grawimetru wynosi ok. 600 kg. Instrumentem tym
wykonano również pomiary na 17 stacjach europejskiej bazy grawimetrycznej – od
Hammerfestu w Norwegii do Katanii na Sycylii i dalej aż do Nairobi. Na każdym stanowisku
obserwacje trwały 3–4 dni, obejmując od 40 do 140 wyznaczeń. Błąd średni średniej wartości
przyspieszenia wahał się w granicach od 0,02 do 0,04
µ
m·s
-2.
Przewaga metody symetrycznego pomiaru nad obserwacjami niesymetrycznymi wiąże
się przede wszystkim z możliwością eliminacji minimalnego wpływu tarcia cząstek
pozostałego powietrza podczas ruchu próbnika w górę i w dół, które oddziałuje z różnym
znakiem. Wyższa jest także dokładność pomiaru interwałów czasu między przejściami przez
poziomy rejestracji.
Oryginalną konstrukcję posiada grawimetr balistyczny zbudowany przez prof. Zbigniewa
Ząbka w Instytucie Geodezji Wyższej i Astronomii Geodezyjnej Politechniki Warszawskiej
[Ząbek, 1996]. Ruch symetryczny masy próbnej na odległości ok. 20 cm obserwowany jest
w tym aparacie na kilkuset poziomach (od 300 do 3000). W kloszu grawimetru utrzymywane
jest ciśnienie ok. 0,1 Pa. Całkowita masa aparatu wynosi ok. 120 kg. Trójścienny reflektor,
o wadze ok. 80 g, wykonany z płaskich sklejonych luster, katapultowany jest za pomocą
urządzenia o podobnej konstrukcji jak w grawimetrze Sakumy. Układ mierzący drogę
reflektora ruchomego stanowią oprócz niego: reflektor w sejsmografie, fotodiody i laser
helowo-neonowy stabilizowany z dokładnością 10
-9
w okresie miesiąca. Jest on
porównywany ze stacjonarnym laserem jodowym AXIS/BIPM ISL 1 o stabilności 10
-10
w dwuletnim interwale czasu. Wzorzec czasu stanowi oscylator kwarcowy Rohde-Schwarz
XSD 2 o stabilności częstotliwości 10
-9
w okresie miesiąca. Impulsy interferometru
z fotodiody odpowiadają odcinkom drogi pryzmatu równym 0,5
λ
fali lasera. Oryginalnie
rozwiązano konstrukcję części mechanicznej komory próżniowej. Jej osłona wykonana
została w kształcie przezroczystej kwarcowej rury szklanej, o średnicy 200 mm i długości
400 mm, zamkniętej dwiema duraluminiowymi pokrywami. Podrzucanie reflektora odbywa
się za pomocą linki gumowej, na której jest on zawieszony. Napinanie tej linki wykonuje
silniczek elektryczny umieszczony na zewnątrz klosza. Na jego osi nawijana jest struna
metalowa. Katapulta zwalniana jest po scentrowaniu reflektora za pomocą dźwigni
połączonych z elektromagnesem. Konstruktor aparatu zastosował wiele własnych
wynalazków w budowie części mechanicznej. Do najważniejszych zaliczyć trzeba
sprężynowy tłumik drgań linki gumowej po podrzuceniu pryzmatu oraz regulator napięcia
linki. Zastosowano odległość między poziomami rejestracji równą 2000
λ
fali interferencji,
czyli 0,63 mm.
Urządzenia do pomiaru pól magnetycznych
Czujnik magnetometru rezonansu protonowego stanowi naczynie wypełnione cieczą
o dużej zawartości atomów wodoru, na przykład woda. Naczynie umieszczone jest wewnątrz
cewki o osi skierowanej prostopadle do mierzonego pola magnetycznego. W pierwszym
cyklu pomiaru przez cewkę przepuszcza się prąd stały polaryzujący ciecz polem o natężeniu
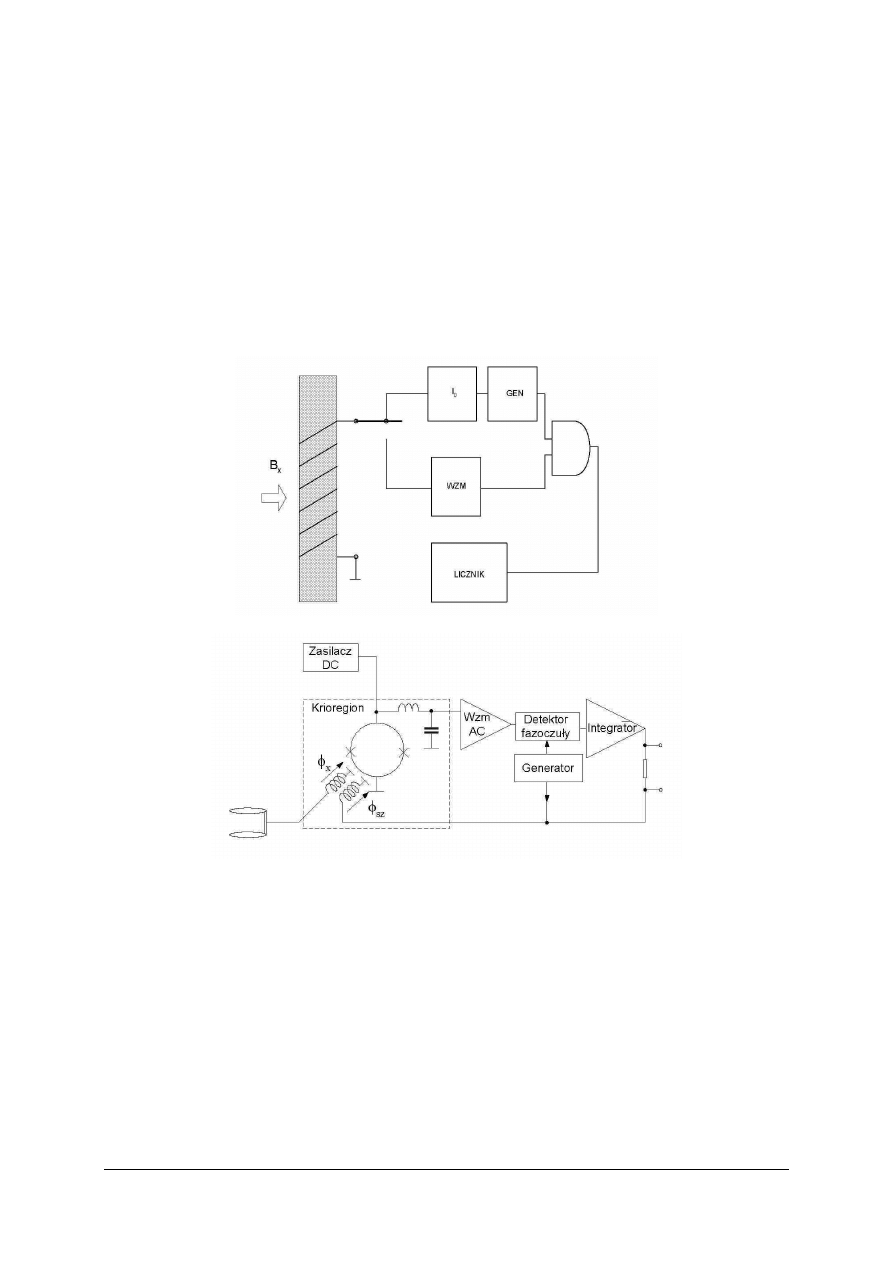
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
rzędu kilku kA/m. Następnie po wyłączeniu prądu cewkę podłącza się do wzmacniacza
(rys. 7). Moment magnetyczny protonów wraca do położenia wyjściowego (zgodnie
z kierunkiem mierzonego pola magnetycznego) co objawia się indukowaniem w cewce
napięcia o malejącej amplitudzie i stałej częstotliwości. Częstotliwość ta zależy od wartości
mierzonego pola, przy czym współczynnikiem proporcjonalności jest współczynnik
ż
yromagnetyczny równy dla rezonansu protonowego
γ
= 42,576375 MHz/T.
Przy pomiarze pola magnetycznego ziemskiego częstotliwość precesji jest równa
zaledwie kilka kHz. Wystarcza to jednak do pomiaru indukcji pola magnetycznego
z rozdzielczością lepszą niż 1 nT. Ponadto dzięki dokładnej znajomości wartości
współczynnika żyromagnetycznego możliwy jest pomiar indukcji z bardzo dobrą
dokładnością nawet poniżej 0,002%. Typowe magnetometry protonowe umożliwiają odczyt
sześciu cyfr z ostatnia cyfrą 1nT lub 0,1 nT.
Rys. 7. Schemat blokowy magnetometru protonowego [19]
Rys. 8. Zasada działania magnetometru protonowego [19]
Magnetometry protonowe są powszechnie stosowane w geofizyce oraz przy
wykonywaniu map rozkładu pola (np. przy wykrywaniu złóż lub łodzi podwodnych). Ich
wada jest stosunkowo duży rozmiar czujnika (naczynie o pojemności 0,5 l lub 1 l). Inną wadą
jest, że w metodzie tej mierzy się tylko moduł wektora indukcji pola magnetycznego.
Nieco bardziej złożone konstrukcyjnie i dokładniejsze są czujniki wykorzystujace zjawisko
Zeemana, tzw. czujniki z pompowaniem optycznym. Spolaryzowane kołowo światło jest
przepuszczane przez naczynie wypełnione parami izotopu cezu, rubidu lub helu. Częstotliwość
zwiększonej absorpcji tego światła zależy od wartości zewnętrznego pola magnetycznego. Tak
na przykład współczynnik żyromagnetyczny dla Rb
87
wynosi
γ
= 6996 MHz/T.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
a)
b)
c)
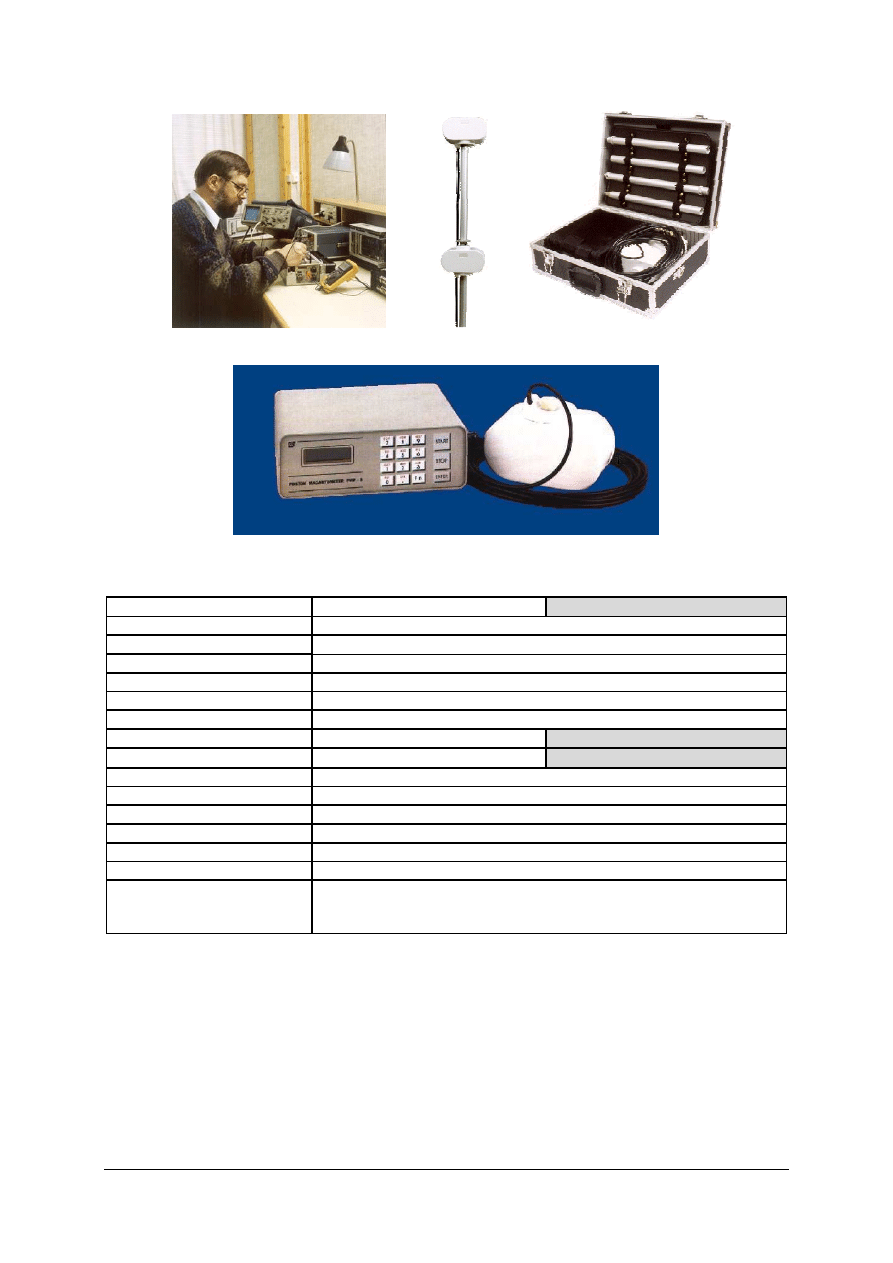
Rys. 9. Magnetometr protonowy PMP – 8: a) w laboratorium, b) sonda, c) PMP-8 w walizce [19]
Rys. 10. Magnetometr PMP-8 – widok ogólny [19]
Tabela. 1. Dane techniczne [12]
Magnetometr
Gradientometr
Zakres pomiarowy
20.000–100.000 nT
Dopuszczalny gradient
2000 nT/m
Dokładność pomiaru
0,1 nT
Dokładność
0,02 nT przy 5s okresie próbkowania
Rozdzielczość
0,01 nT
Próbkowanie
1 to 9999 s
Pojemność pamięci
> 50.000 w trybie AUTO
> 25.000 w trybie GRAD
Sonda (30
Ω
, 115 mH)
1
2
Metoda strojenia
automatycznie (specjalny algorytm strojenia), lub z klawiatury
RS-232 interfejs
9600 b/s, 8 bitów danych, 2 bity stopu, brak parzystości
Temperatura pracy
-5°C to 50°C
Stabilność generatora
1 ppm
Pobór prądu
konsola 65 mA sonda 340 mA
Zasilanie
wew. DC-size Cd-Ni 8 ogniw zewnętrzne 8 do 16V DC
Wymiary i waga
konsola – 260 x 90 x 235 mm, 2,5 kg
sonda – 100 x 90 x 90 mm, 1,7 kg
maszt –1800 mm, 0,6 kg
Magnetometr protonowy PMP-8 służy do pomiaru składowej ziemskiego pola
magnetycznego. Został on zbudowany w oparciu o układy mikroprocesorowe
z wykorzystaniem algorytmów cyfrowej filtracji sygnału precesji, co umożliwia pomiar pola
z dużą dokładnością przy jednoczesnym wyznaczeniu błędu tego pomiaru. Pamięć
wewnętrzna pozwala na zapamiętanie około 25000 wyników pomiarów w trybie SINGLE lub
50000 w trybie AUTO.
Możliwa jest synchronizowana praca dwu lub kilku magnetometrów co daje możliwość
dokonywania pomiarów różnicowych lub redukcji wyników względem magnetometru
bazowego. Magnetometr umożliwia automatyczne oznaczanie współrzędnych punktów

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
pomiarowych, co jest szczególnie przydatne w pracach terenowych. Interfejs RS-232 pozwala
na przepisywanie danych pomiarowych z pamięci magnetometru bezpośrednio do komputera
lub podłączenie do magnetometru drukarki albo rejestratora analogowego /ploter/.
Wykonywane są dwie wersje magnetometru: PMP-8 /pomiar pola F/ i PMP8-G
różnicowy /pomiar pola magnetycznego F i gradientu/. Magnetometr PMP-8G pracuje
z dwiema sondami zamocowanymi w odpowiedniej odległości na wspólnym maszcie. Może
on spełniać wszystkie funkcje magnetometru PMP-8, a ponadto umożliwia pomiar gradientu
pola magnetycznego.
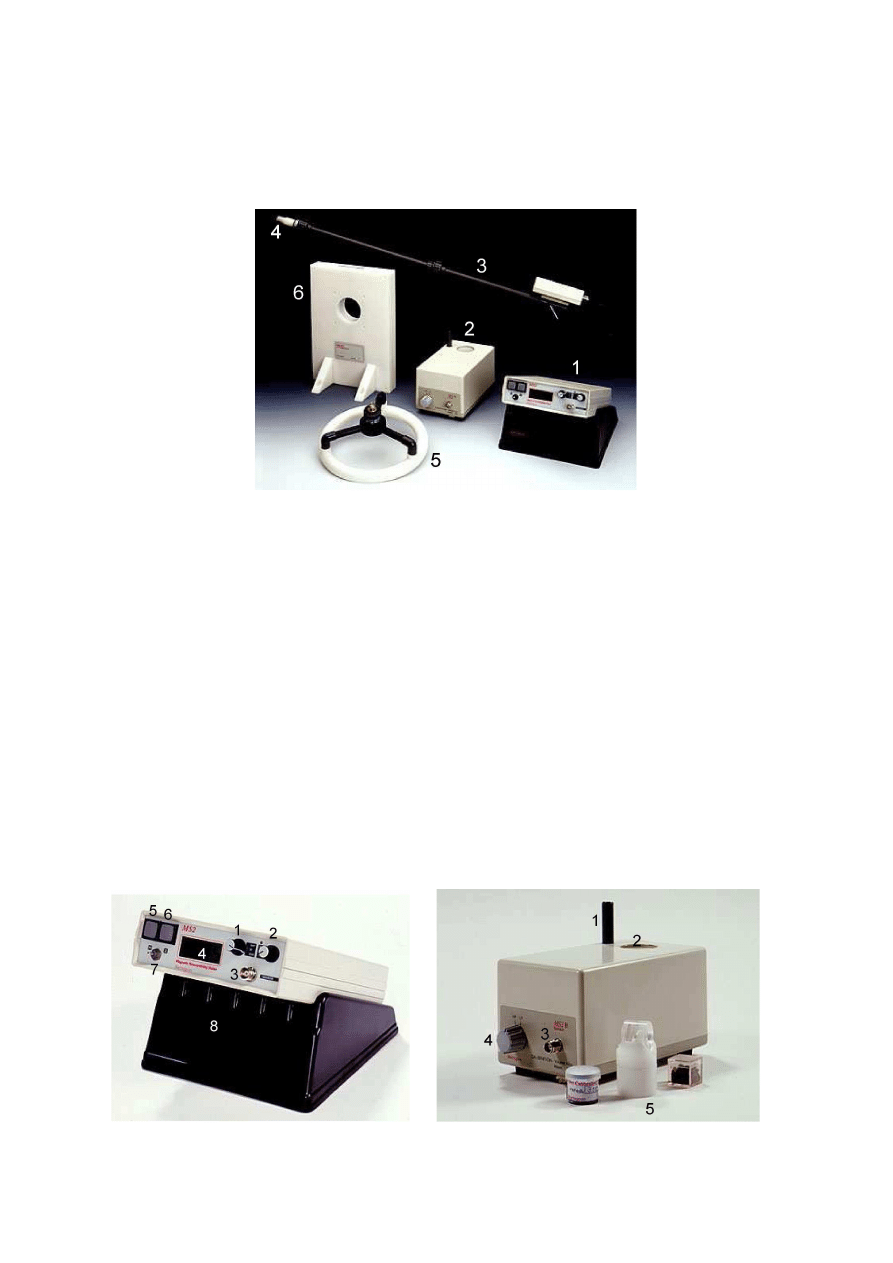
Przykład aparatury pomiarowej
System pomiarowy ENVI-MAG jest aparaturą kanadyjskiej firmy Scintrex Ltd. (rys. 11).
„Sercem” systemu jest konsola magnetometru (1), za pomocą której wprowadza się
ustawienia, współrzędne pomiarów (numer profilu, numer punktu pomiarowego na profilu)
i inne potrzebne dane. Efekty ustawień i pomiarów można obserwować na wyświetlaczu
ciekłokrystalicznym LCD. Konsola wyposażona jest w gniazda służące do przyłączania sondy
pomiarowej (2) do pomiaru indukcji ziemskiego pola magnetycznego lub przyłączenia 2 sond
pomiarowych do pomiaru gradientu pola. Aby (za pomocą odpowiedniego programu (9))
sczytać dane pomiarowe do komputera PC, należy go połączyć przewodem (7) z gniazdem
transmisji danych konsoli. Wewnętrzną baterię akumulatorów zasila się (ładuje się) energią
elektryczną z ładowarki (5) za pomocą przewodu elektrycznego (6).
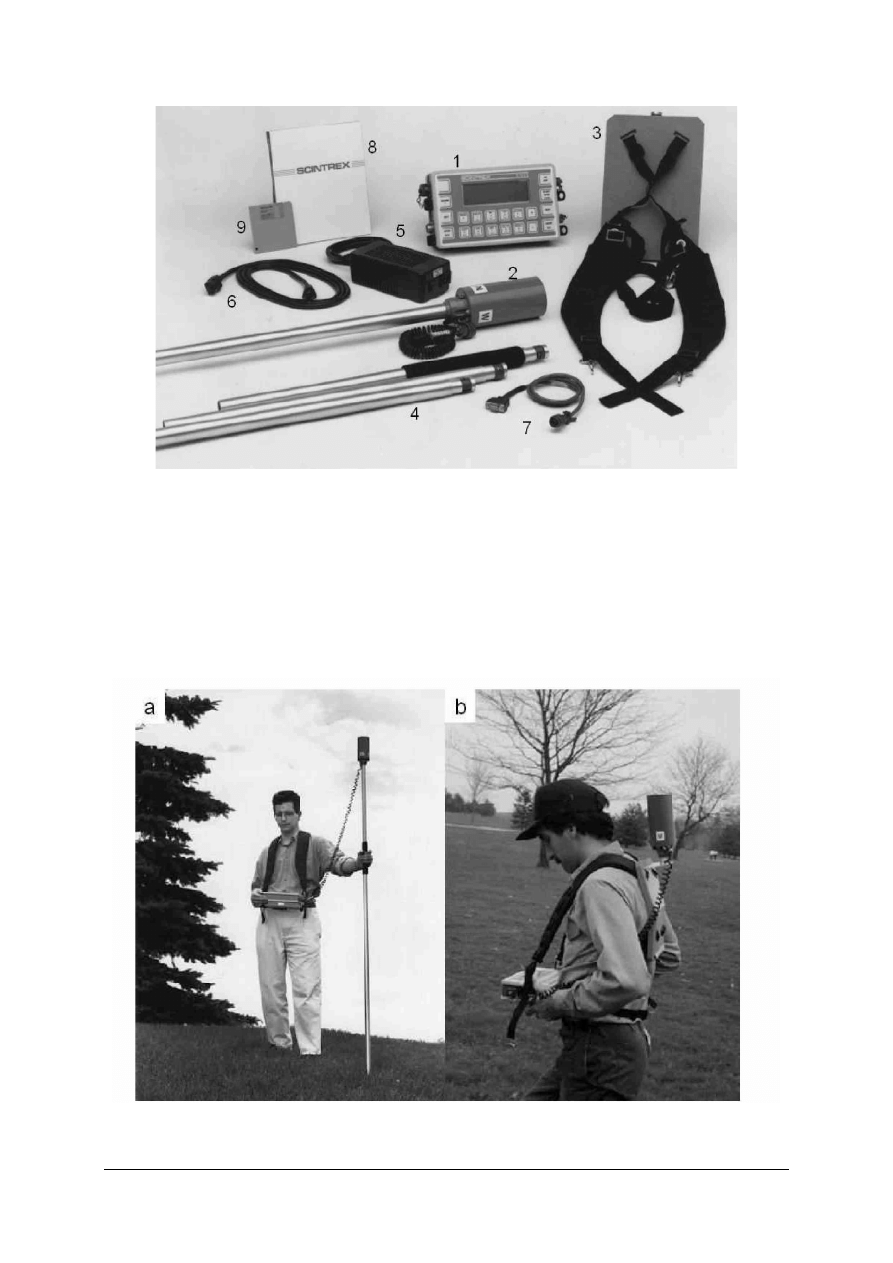
Drugim ważnym elementem jest sonda pomiarowa (2), którą umieszcza się na tyczce (4)
lub stelażu (3) (rys. 12.). Jest ona zbudowana z pojemnika wypełnionego wodą destylowaną,
spirytusem lub węglowodorem (np. heksanem C
6
H
14
, ropą naftową), który znajduje się
wewnątrz solenoidu (cewki indukcyjnej). Nukleony jąder atomów w takim zbiorniku znajdują
się w nieustannym ruchu wirowym i mają orientację w kierunku pola. Gdy przez cewkę
popłynie prąd elektryczny polaryzujący, wówczas wyindukowane zostanie silne pole
magnetyczne o kierunku zgodnym z osią solenoidu, które spolaryzuje jądra atomów w jego
kierunku. Po wyłączeniu prądu polaryzującego, protony zaczną precesować wokół kierunku
wektora pola magnetycznego Ziemi z częstotliwością Larmora, wzbudzając w cewce siłę
elektromotoryczną o częstotliwości proporcjonalnej do wielkości pola magnetycznego Ziemi
zgodnie ze wzorem:
T
2
G
f
⋅
=
gdzie:
T – indukcja ziemskiego pola magnetycznego
G – stała żyromagnetyczna protonów równa stosunkowi momentu magnetycznego do
momentu mechanicznego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
Rys. 11. System pomiarowy ENVI-MAG firmy Scintrex: 1 – konsola magnetometru, 2 – sonda do pomiaru
indukcji ziemskiego pola magnetycznego, 3 – stelaż z uchwytami, 4 – tyczki, 5 – ładowarka,
6 – dodatkowy przewód elektryczny do ładowarki, 7 – przewód łączący konsolę magnetometru
z komputerem PC, 8 – instrukcja obsługi, 9 – dyskietka z programem komputerowym do sczytywania
danych pomiarowych z konsoli (Scintrex, 1994)
[12]
Magnetometr protonowy mierzy moduł wektora ziemskiego pola magnetycznego |T|. Nie
wymaga on poziomowania, poprawek na temperaturę, orientacji i wykazuje wysoką
dokładność ±0,1 nT. Jego zakres pomiarowy wynosi 20000–100000 nT.
Rys. 12. Sposoby umieszczenia sondy podczas pomiarów: a – sonda umieszczona na tyczce, b – sonda
umieszczona na stelażu (Scintrex, 1994)
[12]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
Aparatura pomiarowa służąca do pomiarów podatności magnetycznej skał
Do pomiarów podatności magnetycznej stosowane są 2 typy przyrządów
wykorzystujących prąd zmienny. Są to przyrządy zawierające obwody mostkowe
(kappabridge) oraz obwody zawierające cewki indukcyjne (kappametry). System pomiarowy
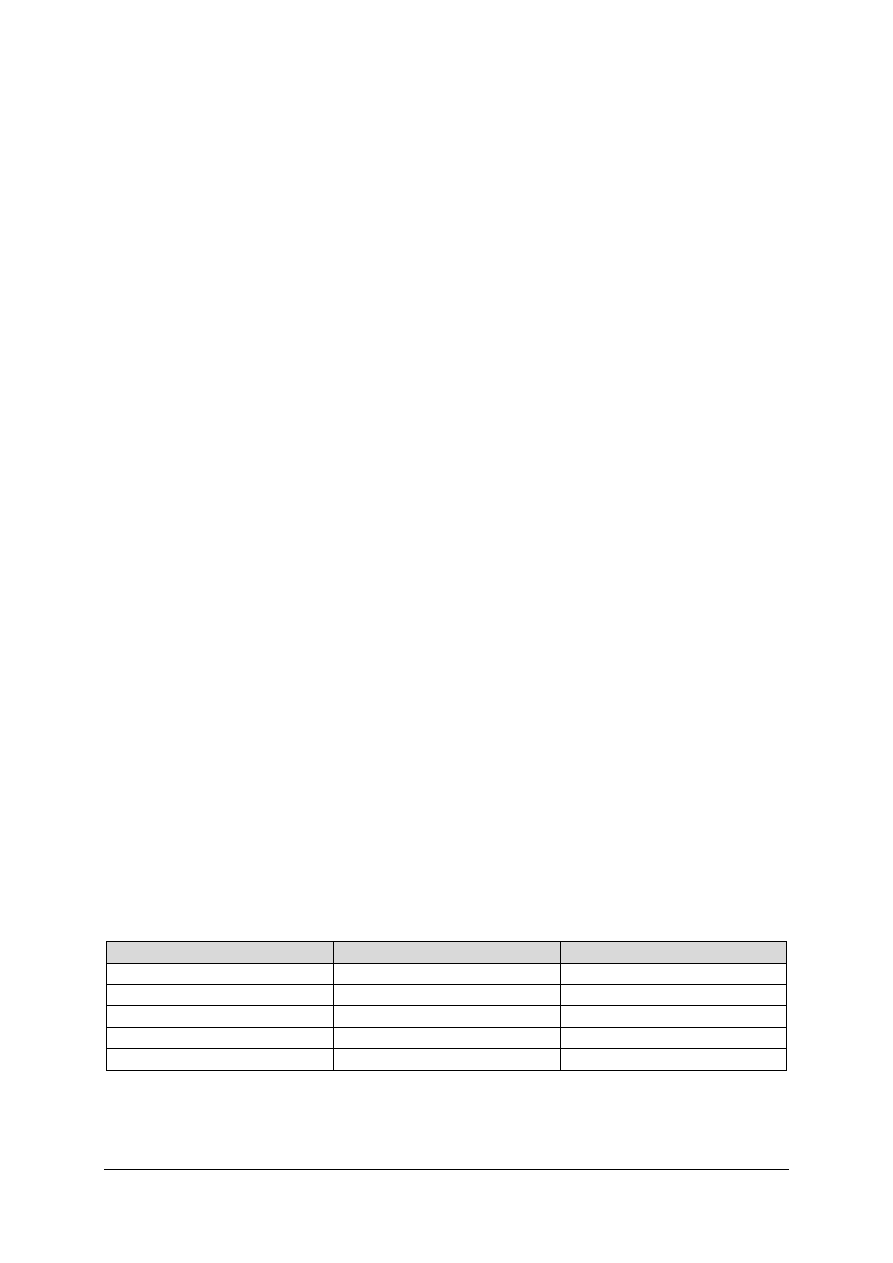
MS2 brytyjskiej firmy Bartington, pokazany na rysunku13, jest kappametrem.
Rys. 13. System pomiarowy Magnetic Susceptibility MS2 firmy Bartington: 1 – miernik podatności
magnetycznej, 2 – czujnik do badań laboratoryjnych MS2B, 3 – uchwyt do pomiarów terenowych
z miernikiem, 4 – czujnik do badań terenowych MS2F, 5 – czujnik (pętla) do badań terenowych MS2D,
6 – czujnik do pomiarów podatności magnetycznej rdzeni wiertniczych MS2C (Bartington, 2004) [12]
Urządzenie pomiarowe (rys. 13) wyposażone jest w przełączniki, przyciski, wyświetlacz
cyfrowy oraz gniazdo zasilające wewnętrzną baterię akumulatorów i gniazdo komunikacyjne
z czujnikiem. W mierniku podatności magnetycznej (rys. 14) przełącznik (1) umożliwia
załączenie i wyłączenie urządzenia oraz zmianę jednostek układu SI/CGS. Przełącznik (2)
pozwala sprawdzić stan baterii oraz wybrać zakres pomiarowy i jednocześnie dokładność
pomiaru 0.1 lub 1.0. Po naciśnięciu przycisku „M” (5), na wyświetlaczu ciekłokrystalicznym
LCD (4) ukazują się wartości podatności magnetycznej objętościowej, w zależności od
pozycji przełącznika (2), w jednostkach SI lub CGS.
Przycisk „Z” (6) pozwala wyzerować przyrząd. Za pomocą przełącznika dwustabilnego
(7) można skonfigurować miernik tak, aby wykonywał pomiary po każdorazowym
naciśnięciu przycisku „M” albo wykonywał pomiar „ciągły” (serię pomiarów). Miernik
połączony jest z czujnikiem za pomocą przewodu koncentrycznego z końcówkami typu TNC.
Aby to zapewnić, zarówno przyrząd pomiarowy, jak i sensor muszą być wyposażone
w gniazda typu TNC (3) jak na rysunku 14 oraz (3) na rysunku 15. Do wygodnej obsługi
miernika bardzo przydatna jest podstawka (8).
Rys. 14. Miernik podatności magnetycznej
(Bartington, 2004) [12]
Rys. 15. Czujnik pomiarowy MS2B (Bartington, 2004) [12]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Czujnik pomiarowy (rys. 15) posiada rączkę (1), za pomocą której, umieszczoną
w uchwycie (2) próbkę (5) wprowadza się do wnętrza sensora. Przełącznik (4) umożliwia
wybór częstotliwości prądu zasilającego cewkę indukcyjną: niska LF (0,465 kHz) i wysoka
HF (4,65 kHz). Różnica wyników pomiarów dla poszczególnych wartości częstotliwości
wskazuje na obecność i ilość minerałów superparamagnetycznych. Opcję LF stosuje się do
zwykłych pomiarów podatności. Sensor zaprojektowany jest tak, że wymiary próbek powinny
być dobrane w zależności od ich kształtu. Kostka sześcienna powinna być o boku 1 cala
(25,4 mm) lub 7/8 cala (23 mm), rdzeń cylindryczny mieć średnicę 1 cala, buteleczka
cylindryczna objętość 10 i 20 cm (ml).
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jaki dzielimy grawimetry?
2.
Co to są grawimetry statyczne?
3.
Jaka jest zasada wykonywania pomiarów za pomocą grawimetru statycznego?
4.
Na czym polega astatyzacja grawimetru?
5.
W jakie systemy rejestracyjne mogą być wyposażone grawimetry?
6.
Jak kompensowany jest wpływ temperatury na wskazania grawimetru?
7.
Na czym polega kalibracja grawimetru?
8.
Za pomocą, jakiego przyrządu mierzymy pole magnetyczne?
9.
Jakie elementy wchodzą w skład zestawu pomiarowego pola magnetycznego?
10.
Z czego zbudowana jest sonda pomiarowa?
4.1.3. Ćwiczenia
Ć
wiczenie 1
Porównaj wady i zalety grawimetrów sprężynowych i balistycznych.
Sposób wykonania ćwiczenia:
Aby wykonać ćwiczenie, powinieneś:
1)
określić zasadę działania grawimetru sprężynowego i balistycznego,
2)
przeanalizować przykładową dokumentację grawimetrów,
3)
odczytać parametry pracy grawimetrów,
4)
określić sposoby kalibrowania grawimetrów,
5)
zapisać uzyskane informacje w tabeli,
6)
zaprezentować wykonane ćwiczenie,
7)
dokonać oceny poprawności wykonanego ćwiczenia.
Porównywane cechy
Grawimetr sprężynowy
Grawimetr balistyczny
Wyposażenie stanowiska pracy:
–
dokumentacja techniczna grawimetrów,
–
literatura zgodna z punktem 6 poradnika dla ucznia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Ć
wiczenie 2
Wskaż podstawy fizyczne działania grawimetru balistycznego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
określić, jakie zjawisko fizyczne zostało wykorzystane przy projektowaniu grawimetrów
balistycznych,
2)
przedstawić na rysunku schemat pomiarowy,
3)
zapisać równanie ruchu ciała próbnego w grawimetrze,
4)
określić pomiary jakie należy wykonać w celu wyznaczenia g ziemskiego,
5)
zaprezentować wykonane ćwiczenie,
6)
dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
dokumentacja techniczna grawimetrów,
−
literatura zgodna z punktem 6 poradnika dla ucznia.
Ć
wiczenie 3
Objaśnij zasadę wykonywania pomiarów pola magnetycznego za pomocą magnetometru
protonowego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
określić jakie zjawisko fizyczne zostało wykorzystane w magnetometrze protonowym,
2)
przedstawić na rysunku schemat pomiarowy,
3)
zaprezentować wykonane ćwiczenie,
4)
dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
dokumentacja techniczna magnetometru protonowego,
−
literatura zgodna z punktem 6 poradnika dla ucznia.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
scharakteryzować
budowę
grawimetrów
sprężynowych
i balistycznych?
2)
wskazać wady i zalety poszczególnych typów grawimetrów?
3)
określić czynniki decydujące o czułości grawimetru?
4)
objaśnić budowę grawimetru nadprzewodnikowego
5)
wymienić elementy czujnika magnetometru protonowego?
6)
określić zakres temperatur pracy magnetometru?
7)
określić, z jakich elementów składa się zestaw do pomiarów pól
magnetycznych?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
4.2.
Obsługiwanie aparatury do badań geoelektrycznych
i elektromagnetycznych
4.2.1. Materiał nauczania
Rodzaje środków technicznych stosowanych w badaniach geoelektrycznych
Nośnikiem informacji o przekroju geoelektrycznym, a tym samym o przekroju
geologicznym, jest pole elektryczne lub elektromagnetyczne, naturalne albo sztuczne.
W celu realizacji badań geoelektrycznych niezbędne są środki techniczne do wzbudzenia
pola (w wypadku korzystania ze sztucznych źródeł) i pomiarów parametrów pola. Pomiary
tych parametrów sprowadzają się na ogół do rejestracji różnicy napięcia i natężenia prądu
oraz określenia geometrycznych wymiarów układu pomiarowego.
Ze względu na liczne modyfikacje badań geoelektrycznych stosuje się bardzo różnorodną
aparaturę i sprzęt pomocniczy. Elementami urządzeń stosowanych we wszystkich metodach
badań geoelektrycznych są:
−
akumulatory, baterie suche, generatory d agregaty prądotwórcze – źródła prądu do
wzbudzania pola elektrycznego i elektromagnetycznego, zasilania mierników i środków
łączności radiowej,
−
elektrody – uziemienia i nieuziemione kontury do galwanicznego i indukcyjnego
wzbudzania pola elektromagnetycznego,
−
elektrody – uziemienia i prętowe anteny do pomiaru składowych elektrycznych, albo
ramki, pętle i inne czujniki do pomiaru składowych pola elektromagnetycznego,
−
przyrządy pomiarowe i rejestratory, kable, bębny i zwijaki do kabli, taśmy miernicze,
busola i inny sprzęt pomocniczy.
Naturalne pole elektryczne jest badane poprzez pomiar potencjału albo gradientu
potencjału. Pomiary tych parametrów można wykonywać na lądzie, w otworach wiertniczych,
wyrobiskach górniczych i zbiornikach wodnych. W metodzie potencjałów własnych
przyrządami pomiarowymi są autokompensatory, a sprzętem pomocniczym – elektrody
niepolaryzujące i kable. Osobliwością badań metodą potencjałów własnych jest stosowanie
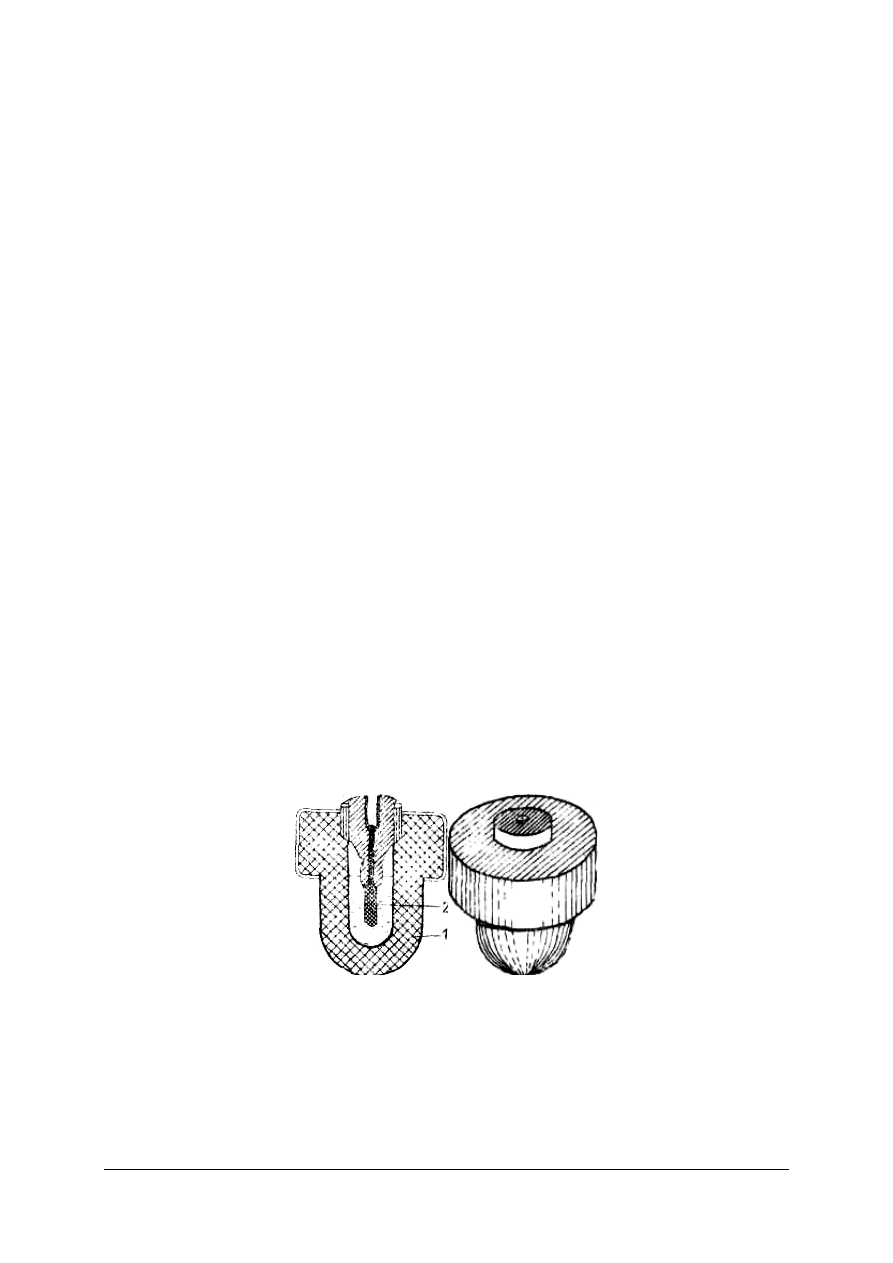
jako uziemień elektrod niepolaryzujących. Elektroda niepolaryzująca to naczynie ceramiczne
o małej porowatości, wypełnione roztworem siarczanu miedzi z umieszczonym w środku
prętem z czystej elektrolitycznej miedzi (rys. 16).
Rys. 16. Elektroda niepolaryzująca: 1 – naczynie porowate, 2 – pręt miedziany [9, s. 84]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Rys. 17. Elektroda służy do pomiaru prądów tellurycznych, jakie występują w skorupie ziemskiej [9, s. 86]
Budowa nowoczesnej elektrody niepolaryzującej
Elektroda składa się z korpusu zbudowanego z grubościennej rury wykonanej z tworzywa
odpornej na urazy mechaniczne, a jednocześnie obojętnej chemicznie. W jej górnej części
znajduje się „korek” służący do jej zamknięcia oraz jednocześnie do zamocowania
wewnętrznej elektrody miedzianej i wyprowadzenia przewodu (izolowana linka miedziana
o długości około 1,5 m) do podłączenia z aparaturą pomiarową. Całość połączona jest
z korpusem w sposób zapewniający szczelność. Przewód elektryczny łączony jest
z miedzianą elektrodą przez zaciskanie. Taki sposób mocowania eliminuje powstawanie mini
ogniw, które tworzyłyby się w przypadku zastosowania do łączenia przewodu i elektrody
miedzianej np. spoiwa cynowo-ołowiowego. Przewód elektryczny zabezpieczony jest przed
„wyrwaniem” z elektrody specjalną końcówką zaciskową. Wewnętrzna elektroda miedziana
składa się z pręta miedzianego oraz przykręcanej za pomocą miedzianego wkręta,
perforowanej tarczy.
Z drugiej strony elektroda zamknięta jest półprzepuszczalną płytką ceramiczną dokręcaną
za pomocą nakrętki wykonanej z tego samego materiału co korpus elektrody. Płytka
ceramiczna zabezpieczona jest przed niepożądanymi wyciekami elektrolitu za pomocą
dwóch, odpowiednio dobranych pierścieni uszczelniających typu „oring”. Materiał „oringów”
dobrany jest tak, aby nie wchodził w reakcje z elektrolitem. Całość stanowi zwartą
konstrukcję, łatwą do stosowania w każdych warunkach. Solidna obudowa zabezpiecza przed
urazami mechanicznymi, jakie mogą zdarzyć się podczas zakopywania i odkopywania
elektrody w ziemi. Łatwość wymiany płytek ceramicznych oraz uzupełniania elektrolitu
w warunkach polowych jest dodatkową zaletą powstałej konstrukcji.
Przy pomiarach, elektrody niepolaryzującej umieszcza się w dołkach o głębokości
10–20 cm, a do prętów miedzianych podłącza się autokompensator. Jako kabli
podłączeniowych używa się przewodów lekkich, elastycznych i dobrze izolowanych. Taki
układ zabezpiecza stałą i znikomą polaryzację własną elektrod (kilka miliwoltów).
Rys. 18. Ogólny widok polowego komutatora elektrod
konstrukcji Przedsiębiorstwa Badań
Geofizycznych w Warszawie [12]
Rys. 19. Kosa pomiarowa [12]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Przy badaniach o dużym zasięgu głębokościowym stosuje się specjalny zestaw
aparaturowy składający się z części zasilającej i pomiarowej. Część zasilająca zestawu
zmontowana na samochodzie składa się z dwu generatorów o maksymalnej mocy do 22,5
KW. Część pomiarowa zestawu zapewnia automatyczną galwanometryczną rejestrację
∆
U.
Przykłady zestawów pomiarowych
Aparatura geoelektryczna do badań archeologicznych ADR-97
Aparatura składa się z nadajnika, generującego prąd przemienny o regulowanej
i tabilizowanej wartości, wzbudzającego w gruncie pole elektryczne oraz odbiornika
mierzącego napięcie pomiędzy dwoma punktami tego pola. Odbiornik jest sterowany przez
system mikroprocesorowy, który zapewnia także obliczenia i akwizycję wyników pomiarów
w wewnętrznej pamięci z podtrzymaniem zasilania. Wyniki mogą być przetransmitowane do
mikrokomputera, gdzie po konwersji stanowią bazę danych dla programów interpretacyjnych.
Konstrukcja i oprogramowanie aparatury są podporządkowane pozyskiwaniu informacji
o przestrzennym rozkładzie rezystancji gruntu – poprzez wykorzystanie wielu typów układów
pomiarowych. Typy te są ujęte w trzy grupy: pomiary metodą środkowego gradientu
(typ „G”), metodą stałego współczynnika K (typ „K”) i pionowe sondowania elektrooporowe
(typ „S”).
Pomiary typu „G” obejmują kwadraty 10 m x 10 m, przy czym jest możliwa regulacja
głębokości penetracji. Zbiory wyników z poszczególnych kwadratów mogą być łączone
w celu sporządzania map rozkładu rezystancji dla całego obszaru badań.
Pomiary typu „K” dotyczą wszelkich układów pomiarowych asymetrycznych
i symetrycznych, dwu-, trój- i czteroelektrodowych z możliwością dowolnego wyboru
głębokości penetracji. Obszar badań może obejmować kwadraty lub prostokąty o wybranych
rozmiarach. Zbiory wyników mogą służyć do sporządzania map rozkładu rezystancji gruntu.
Pomiary typu „S” służą do uzyskania pionowych przekrojów rozkładu rezystancji gruntu.
Mogą to być rozkłady rezystancji pozornej lub rzeczywistej (po uprzednim indywidualnym
zinterpretowaniu poszczególnych sondowań).
Aparatura może być wykonana w dwóch wersjach nadajnika o zróżnicowanej mocy
wyjściowej.
Aparatura do ciągłych badań rezystancji górotworu CRM-94
Aparatura jest przeznaczona do automatycznych pomiarów i rejestracji rezystancji skał
górotworu. Może także mierzyć elektryczne przebiegi wolnozmienne oraz temperaturę.
Wyniki pomiarów prowadzonych przy pomocy aparatury służą do badania dynamicznych
zmian rezystancji elektrycznej górotworu wywołanych zjawiskami zmian naprężeń
mechanicznych w górotworze.
Rezystancja skał jest mierzona metodą elektrooporową przy użyciu prądu zmiennego
o regulowanej częstotliwości. Pomiary są wykonywane z wysoką rozdzielczością
i dokładnością poprzez wykorzystanie algorytmów autokorekcji czułości torów pomiarowych.
Aparatura posiada dwa tryby pracy: pomiary precyzyjne z wysoką rozdzielczością (PREC)
i pomiary szybkie (FAST).
Pomiary w trybie PREC odbywają się w sposób ciągły na wielu stanowiskach
pomiarowych, cyklicznie przełączanych programowo. Liczba stanowisk pomiarowych i krok
repetycji pomiarów są programowo regulowane. Długie okresy rejestracji, szeroki zakres
regulacji kroku pomiarowego i wysoka precyzja pomiarów pozwalają śledzić zjawiska
długookresowe o minimalnych amplitudach (rzędu ułamków promila). Możliwość wyboru
wielu stanowisk pomiarowych pozwala badaniami obejmować znaczne obszary i korelować
wzajemnie obserwowane zjawiska.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Pomiary w trybie FAST są prowadzone jednocześnie w czterech kanałach odbiorczych
z dużą repetycją. Umożliwiają one badania zjawisk dynamicznych krótkookresowych.
Wyniki pomiarów elektrycznych przebiegów wolnozmiennych stanowią informację
uzupełniającą, natomiast wyniki pomiarów temperatury pozwalają rozdzielać typy zjawisk.
Wyniki pomiarów są wyświetlane na bieżąco i magazynowane w kasetach pamięci RAM
(z podtrzymaniem napięcia zasilania). Pełna automatyka procesów pomiarowych zapewnia
autonomiczną pracę aparatury w długich okresach czasu.
Wyniki badań są cyklicznie przegrywane do mikrokomputera zewnętrznego.
Oprogramowanie mikrokomputera zapewnia dekodowanie wyników badań ich obróbkę
numeryczną oraz wizualizację graficzną i numeryczną, a także wydruki raportowe.
Aparatura może być instalowana w wyrobiskach podziemnych i na powierzchni. Może
także służyć do prowadzenia badań laboratoryjnych na próbkach skalnych.
Aparatura składa się z następujących bloków:
1)
blok pomiarowy,
2)
nadajnik,
3)
mikroprocesorowy system sterujący,
4)
blok komutacji stanowisk pomiarowych,
5)
kasety pamięci RAM,
6)
blok zasilania.
Blok komutacji stanowisk pomiarowych jest rozproszony i umieszczany w pobliżu
elektrod. Rozwiązanie takie zapewnia minimalizację ilości żył kabli połączeniowych,
minimalizację sprzężeń wzajemnych i możliwość oddalenia aparatury od rejonu badawczego.
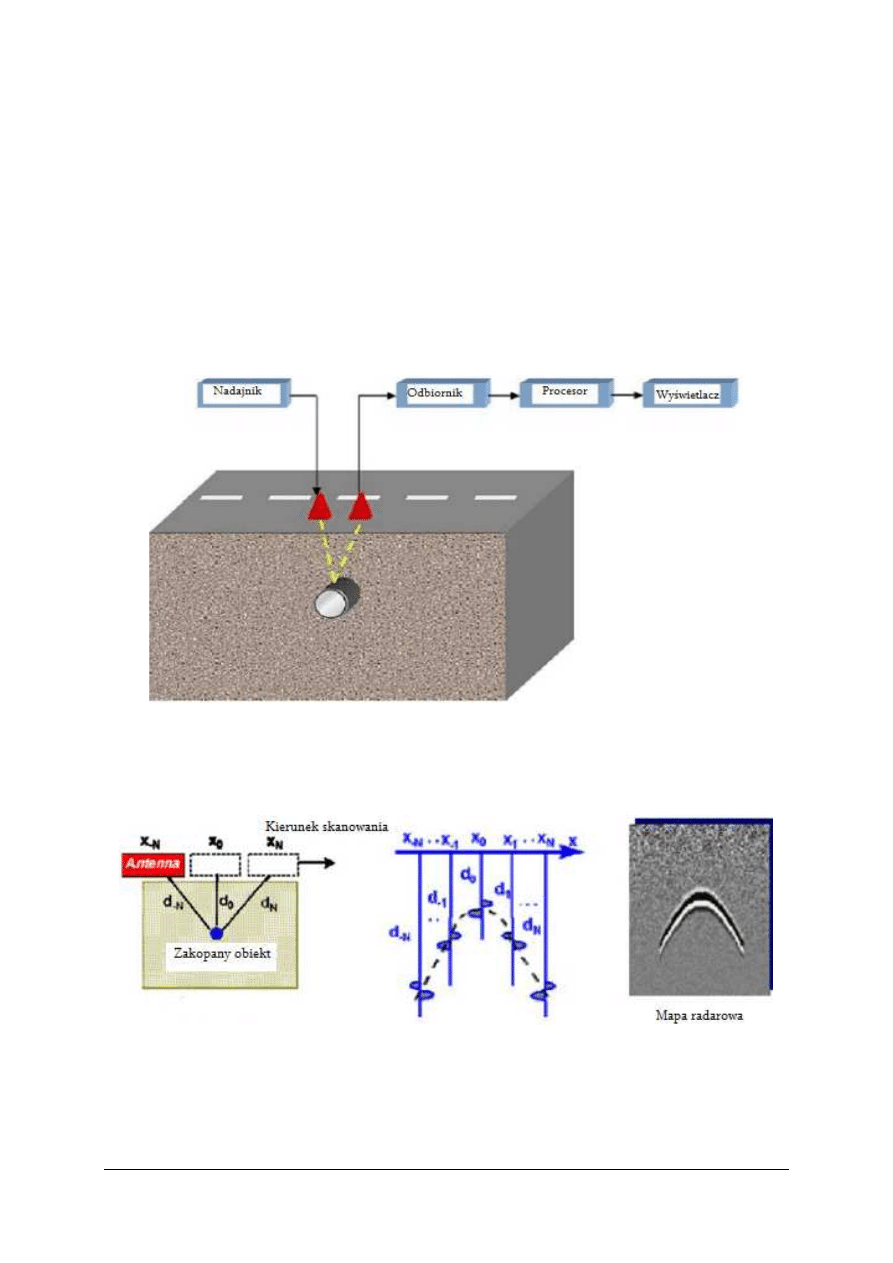
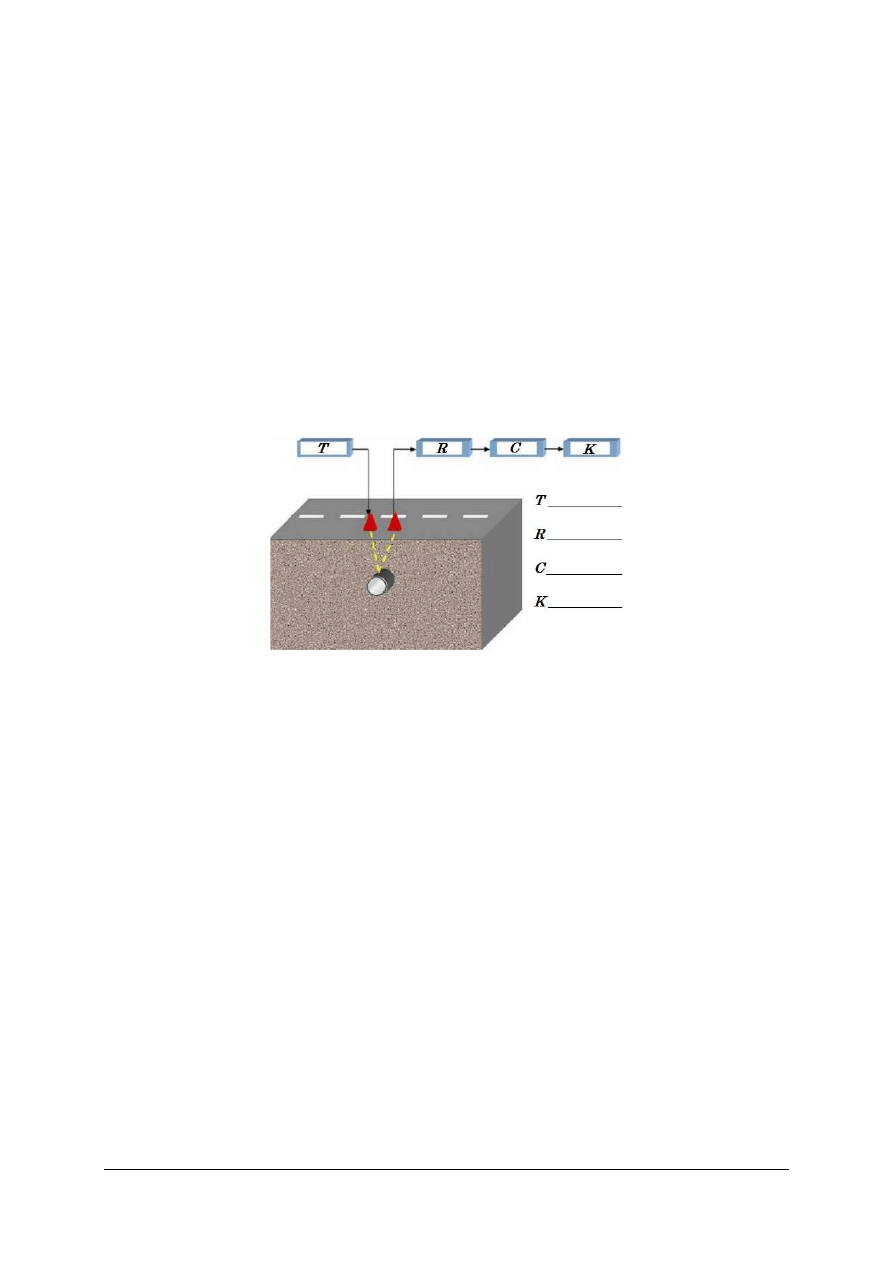
Budowa i działanie georadaru
Radar do penetracji gruntu (GPR) nazywany też georadarem, jest wysokiej klasy
elektroniczną aparaturą do badań geofizycznych własności gruntu. Urządzenie to działa na
zasadzie zliczania opóźnień impulsów elektromagnetycznych o bardzo wysokiej
częstotliwości (10–1000 MHz) nadawanych przez antenę nadawczą, które odbite od różnych
ośrodków gruntu (granic litologicznych), odbierane są przez antenę odbiorczą i przekazywane
na jednostkę centralną w celu zliczania czasu opóźnień powrotu fali. Przez granice odbijające
sygnał radarowy należy rozumieć granice między ośrodkami różniącymi się wartością stałej
dielektrycznej (E). Różne skały i materiały charakteryzują się różnymi wartościami stałej
dielektrycznej (średnio E = 1–8). Impulsy wysyłane przez antenę nadawczą lub anteny
nadawcze (T – transmiter), w głąb ośrodka, wracają z opóźnieniem do anteny odbiorczej
(R – receiver) i przez światłowody trafiają do sterującej systemem jednostki centralnej (C),
a następnie są przetwarzane i przesyłane do rejestratora (K – np. dysk twardy przenośnego
komputera). Impulsy te, są w terenie obserwowane przez operatora (na monitorze), w postaci
falogramu czasowego (F), tj. liniowego (pionowego) przekroju zmienności parametrów
gruntu. Wykres taki można następnie przeliczać np. na jednostki metryczne, można
wydrukować w kolorach (tzw. filtracja – odrębny kolor dla różnych prędkości przechodzenia
fal) lub przetworzyć w postaci plików GIF itp. Uzyskany obraz można porównywać
z wzorcowymi obrazami różnych obiektów ukrytych w gruncie lub z wzorcowymi obrazami
struktur geologicznych, albo z dokumentacją kartograficzną odsłonić, a także z danymi
uzyskanymi z wierceń geologicznych, geotechnicznych itp.
Aparatura radarowa (np.: RAMAC/GPR), jako aparatura przenośna zasilana bateriami
12 V, stosowana jest do terenowych badań z powierzchni terenu (bywa także
wykorzystywana do badań pod ziemią). Ostatnio wprowadzane są także anteny do badań
w otworach wiertniczych. W stosunku do innych metod geofizycznych, metoda radarowa
pozwala na liniowe śledzenie budowy geologicznej w terenie, to znaczy na śledzenie litologii
i płytkich struktur geologicznych. Stosowanie wymienne anten o mocy: 10 MHz, 50 MHz,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
100 MHz, 200 MHz, 400 MHz itd. zależy od postawionego zadania oraz od założonej
głębokości monitoringu gruntu (górotworu). Im niższa częstotliwość anten tym większy
zasięg głębokościowy profilowania, a mniejsza dokładność informacji o warstwach płytszych.
W badaniach płytkich struktur (geologiczno-inzynierskich, archeologicznych, kryminalnych)
używa się anten osłoniętych.
Georadar, w najprostszym przypadku, wyposażony jest w dwie anteny: nadawczą
i odbiorczą. Antena nadawcza wysyła impuls elektromagnetyczny o wysokiej częstotliwości.
Fala przechodząc przez badany ośrodek ulega tłumieniu, wielokrotnemu rozproszeniu i odbiciu
na granicach różnych materiałów. Antena odbiorcza rejestruje falę odbitą (rys. 20). W celu
uzyskania przekrojowego obrazu badanego ośrodka, tak wykonywany pomiar jest powtarzany
wielokrotnie. W czasie jego trwania anteny georadaru przemieszczane są w jednym kierunku.
W efekcie tak przeprowadzonej serii pomiarów otrzymujemy charakterystyczny obraz jak na
rysunku 21, zwany profilem georadarowym lub też echogramem.
Rys. 20. Zasada wykonania pojedynczego pomiaru metodą GPR [17]
Wielkość rejestrowanej anomalii i jej położenie uzależnione są między innymi od
wielkości i lokalizacji obiektu wewnątrz badanego ośrodka.
Uzyskiwany na rejestrowanym obrazie kontrast uzależniony jest natomiast od względnej
różnicy pomiędzy stałymi dielektrycznymi graniczących ze sobą materiałów.
Rys. 21. Sposób tworzenia mapy przekrojowej [17]
Częstotliwość fali w obecnie stosowanych georadarach wynosi od 10 MHz do ponad
2 GHz i uzależniony jest od budowy anten pomiarowych. Tak szeroki zakres stosowanych
częstotliwości wynika z potrzeby dopasowania parametrów do oczekiwanych wyników
pomiarowych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Od częstotliwości pracy anten zależy przede wszystkim wielkość wykrywanych
obiektów im wyższa częstotliwość tym mniejsze obiekty można wykrywać. Nie jest to jednak
prosta zależność. Minimalna wielkość obiektu zależy od wielu czynników: rodzaju gruntu,
materiału, z jakiego wykonany jest poszukiwany obiekt ilości i ułożenia anten, itd.
Jakkolwiek, dla rur, można podać promień krytyczny, poniżej którego znacznie obniża się
jakość ich wykrywania. Wartość tego promienia opisuje zależność:
r = 0,1 ·
λ
gdzie:
r – promień krytyczny,
λ
(lambda) – długość fali, równa prędkości rozchodzenia się fali w badanym ośrodku
podzielonej przez częstotliwość.
W tabeli 2 podano minimalne rozmiary dla wybranych częstotliwości pracy georadaru
dla rur umieszczonych w ziemi (szybkość rozchodzenia się fali l = 100 cm/ns).
Tabela 2. Minimalne wielkości wykrywanych obiektów w zależności od częstotliwości pracy anten
pomiarowych [12].
Częstotliwość pracy anten
Minimalna średnica
200 MHz
5 cm
400 MHz
2,5 cm
600 MHz
1,25 cm
Wraz ze wzrostem częstotliwości fali elektromagnetycznej, rośnie również jej tłumienie.
Powoduje to zmniejszenie zasięgu głębokościowego.
Podobnie jak przy ocenie minimalnej wielkości wykrywanych obiektów, również
głębokość penetracji fal elektromagnetycznych uzależniona jest od właściwości badanego
ośrodka (stała dielektryczna, przewodność, wilgotność, porowatość) oraz od częstotliwości
pracy anten. Zatem nie jest możliwe podanie głębokości w postaci pojedynczej wielkości,
która byłaby poprawna we wszystkich sytuacjach.
W praktyce uzyskiwane wielkości mogą się znacznie różnić, np. dla anteny 100 MHz
uzyskiwany zasięg w skałach wapiennych może przekraczać 12 m, podczas gdy przy
pomiarach w gruncie wynosi do 5–6 m.
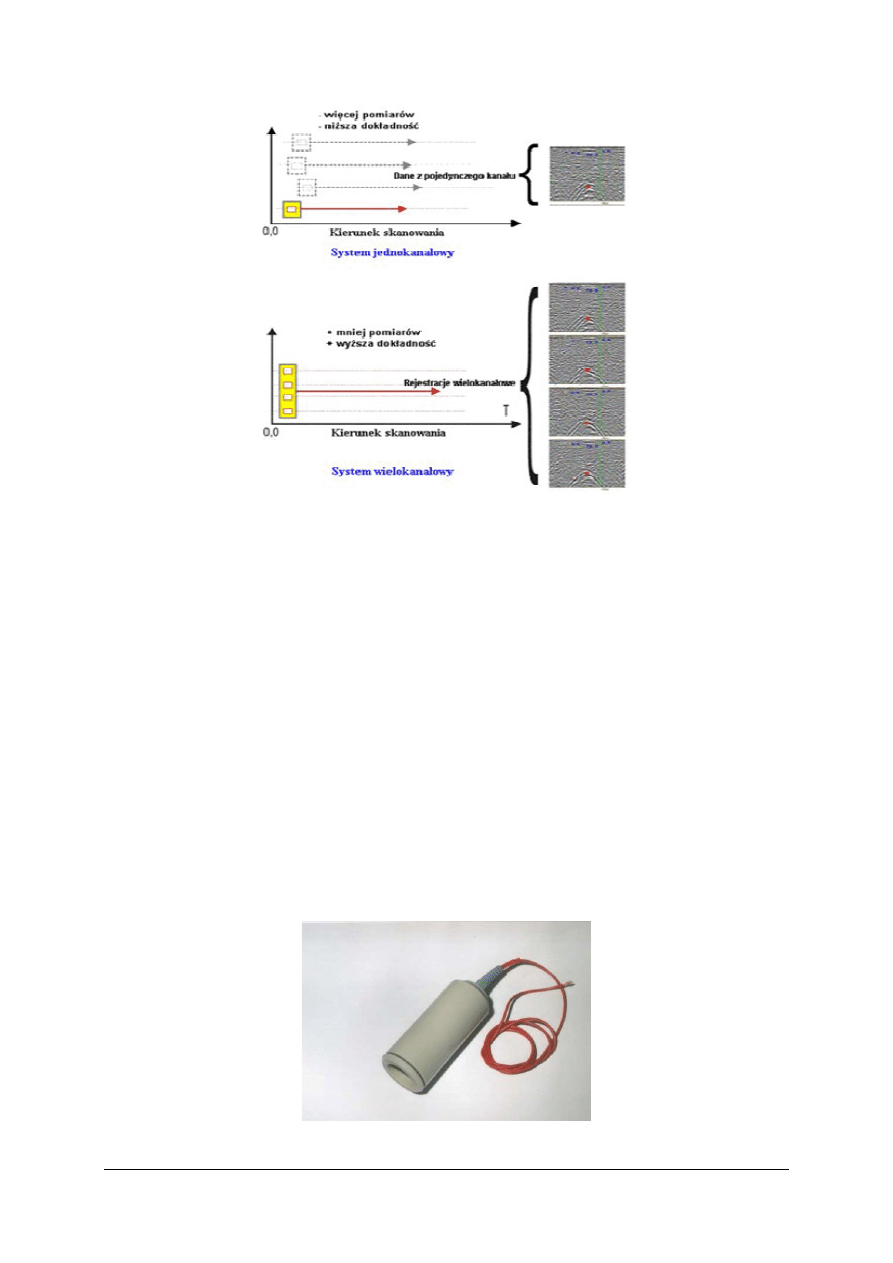
W praktyce obraz tworzony podczas badań georadarem jest znacznie bardziej
skomplikowany niż pokazany na rysunku 21, szczególnie gdy złożoność budowy badanego
ośrodka oraz zagęszczenie obiektów jest znaczna. Jakość jego interpretacji, zależy wtedy
w bardzo dużym stopniu od doświadczenia osoby interpretującej. Aby poprawić jakość
lokalizacji obiektów podziemnych pomiary wykonywane są przy pomocy systemów
wielokanałowych. Do pojedynczej jednostki rejestrującej podłączane są 2, 3 lub 4 pary anten.
Pomiar wykonywany jest równocześnie wszystkimi antenami (rys. 22). Ponieważ anteny są ze
sobą połączone nie występuje problem korelacji przestrzennej otrzymanych z poszczególnych
anten danych. Poprawia to znacznie jakość lokalizacji obiektów podziemnych i znacząco
zmniejsza poziom błędów interpretacji. Przeprowadzone badania (Pinelli 1999) jakości
detekcji
wskazują
jednoznacznie
przewagę
systemu
wielokanałowego.
Jeżeli
prawdopodobieństwo wykrycia obiektu dla systemu z pojedynczą parą anten oscyluje
w okolicy 60%, to dla systemu czterokanałowego można uzyskać już 95%.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Rys. 22. Zalety stosowania zespołu złożonego z wielu połączonych anten [14]
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jakie środki techniczne stosujemy w badaniach geoelektrycznych?
2.
Z czego zbudowana jest elektroda niepolaryzująca?
3.
Do czego służy komutator elektrod?
4.
Z jakich elementów składa się typowa aparatura do badań geoelektrycznych?
5.
Z jakich elementów składa się aparatura do ciągłych badań rezystancji górotworu?
6.
Jak zbudowany jest georadar?
7.
Jaką funkcję spełnia antena georadaru?
8.
Jaki jest związek pomiędzy częstotliwością anten a głębokością penetracji?
9.
Jak obliczmy promień krytyczny dla wykrywanych obiektów?
10.
Jakie zalety posiadają systemy wielokanałowe stosowane podczas badań georadarem?
4.2.3. Ćwiczenia
Ć
wiczenie 1
Objaśnij budowę i zastosowanie elektrody niepolaryzującej.
Rysunek do ćwiczenia 1 [10]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
wskazać na modelu elektrody elementy, z których jest zbudowana,
2)
określić, do jakich pomiarów geoelektrycznych stosujemy elektrody niepolaryzujące,
3)
zaprezentować wykonane ćwiczenie,
4)
dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
dokumentacja techniczna elektrody niepolaryzującej,
−−−−
model elektrody niepolaryzującej,
−−−−
literatura zgodna z punktem 6 poradnika dla ucznia.
Ć
wiczenie 2
Rozpoznaj elementy georadaru.
Rysunek do ćwiczenia 2 [17]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
rozpoznać na schemacie elementy georadaru,
2)
zapisać nazwy lub funkcje wykonywane przez oznaczone literami elementy zestawu,
3)
zaprezentować wykonane ćwiczenie,
4)
dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
schemat budowy georadaru,
−−−−
literatura zgodna z punktem 6 poradnika dla ucznia.
Ć
wiczenie 3
Wymień bloki aparatury CRM-94 stosowanej do ciągłych badań rezystancji górotworu.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować dokumentację aparatury stosowanej do ciągłych badań rezystancji
górotworu,
2)
wskazać funkcje poszczególnych elementów aparatury,
3)
podań nazwy bloków z określeniem ich funkcji,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
4)
zaprezentować wykonane ćwiczenie,
5)
dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
dokumentacja techniczna aparatury CRM-94,
−
literatura zgodna z punktem 6 poradnika dla ucznia.
Ć
wiczenie 4
Dobierz częstotliwość pracy anten georadaru do poszukiwań na rozpoznanym stanowisku
archeologicznym.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować dokumentację rozpoznania archeologicznego terenu,
2)
określić rozmiary poszukiwanych elementów,
3)
dobrać częstotliwość pracy anten do wielkości poszukiwanych obiektów,
4)
zaprezentować wykonane ćwiczenie,
5)
dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
dokumentacja rozpoznania archeologicznego terenu,
−−−−
dokumentacja techniczna georadaru,
−−−−
tabele doboru anten,
−−−−
literatura zgodna z punktem 6 poradnika dla ucznia.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wymienić środki techniczne stosowane w badaniach geoelektrycznych?
2)
objaśnić jak zbudowana jest elektroda niepolaryzująca?
3)
wymienić elementy których składa się typowa aparatura do badań
geoelektrycznych?
4)
określić przeznaczenie komutatora elektrod?
5)
wskazać elementy typowej aparatury do wykonywania pomiarów
geoelektrycznych?
6)
objaśnić działanie georadaru?
7)
dobrać częstotliwość pracy anten do wielkości poszukiwanego
elementu?
8)
scharakteryzować zalety pomiarów wielokanałowych?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
4.3.
Obsługiwanie aparatury do badań sejsmicznych
4.3.1. Materiał nauczania
Ź
ródła sejsmiczne
Ź
ródłem sejsmicznym (sztucznym) nazywamy ograniczony obszar, wewnątrz którego
urządzenie wzbudzające powoduje nagłe wyzwolenie energii prowadzące do gwałtownego
wzrostu naprężeń w ośrodku otaczającym. Większość urządzeń wzbudzających generuje
w głównej mierze fale kompresyjno-dylatacyjne. Źródło sejsmiczne charakteryzowane jest
przez poziom wyzwalanej energii i widmo częstotliwościowe sygnału. Zwykle generowane
jest szerokie pasmo częstotliwości w zakresie 1 Hz do kilkuset Hz, chociaż często większa
część energii emitowana jest w wąskim przedziale częstotliwości. Dobór źródła zależy od
założonego celu pomiarów i wymaganej głębokości rozpoznania.
Eksplozyjne źródła sejsmiczne
Eksplozyjne źródła sejsmiczne są detonowane w płytkich otworach strzałowych w celu
lepszego sprzężenia źródła energii z gruntem i zminimalizowania dewastacji terenu. Źródła
eksplozyjne są stosunkowo tanie i wysoce efektywne, lecz ich użycie wymaga specjalnych
zezwoleń i zabezpieczenia logistycznego (transport, przechowywanie, ochrona).
Sprzęt używany do wiercenia otworów strzałowych jest lżejszy od sprzętu używanego
w wierceniach geologicznych czy hydrogeologicznych, z tego względu nie zawsze pozwala
na wiercenie w skałach twardych. W tym przypadku stosuje się strzelania naziemne lub
nadziemne (powietrzne).
Typowe materiały wybuchowe stosowane w sejsmice
Dynamit – jest najwcześniej stosowanym materiałem wybuchowym. Istnieje kilka
odmian dynamitu wytwarzanego na bazie nitrogliceryny i absorbentów z dodatkami
zmniejszającymi wrażliwość na wstrząsy i ułatwiającymi bezpieczne używanie. Typowymi
dodatkami dynamitów żelatynowych są azotany potasu, sodu lub amonu.
Wadą dynamitu jest jego wrażliwość na wstrząsy lub wysoką temperaturę. W niskich
temperaturach jest on skrajnie czuły na wstrząsy, w wysokich temperaturach wydziela
nitroglicerynę i staje się niebezpieczny w przechowywaniu i przenoszeniu.
Znacznie bezpieczniejszymi materiałami wybuchowymi są mieszanki azotanów
(np. azotanu amonowego) z olejem napędowym. Każdy z tych składników z osobna nie jest
wybuchowy, dlatego można je bezpiecznie przenosić i przechowywać. Połączenie ich ze sobą
w odpowiedniej proporcji daje materiał wybuchowy o mocy porównywalnej z dynamitem.
Dodatkową zaletą takich materiałów wybuchowych jest ich niski koszt, co jest istotne, gdy
potrzebna jest duża ilość materiału wybuchowego.
Formowanie ładunków wybuchowych
Materiały wybuchowe, które przeważnie ładowane są do otworów o małej średnicy,
formowane są w pręty różnych rozmiarów. Ponieważ otwory wiertnicze wypełnia się wodą dla
zwiększenia ciśnienia w czasie wybuchu, ładunki muszą być umieszczone w wodoodpornej
osłonie, najczęściej w kartonowych lub plastikowych cylindrycznych tubach. Tuby mogą być
łączone ze sobą, pozwalając na tworzenie ładunków zwielokrotnionych. Dodatkową rolą osłon
jest usztywnienie ładunku ułatwiające umieszczanie ich w otworze strzałowym.
Materiały wybuchowe odpalane na powierzchni nie muszą być formowane w pręty.
Przeciwnie, konieczność powiększenia masy materiału wybuchowego sprawia, że umieszcza
się je w różnego rodzaju workach.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Rys. 23. Ładunki wybuchowe – sejsmogel [19]
Rys. 24. Zapalniki [19]
Umieszczanie ładunków wybuchowych w otworze strzałowym
Zapalniki i detonatory
Dla potrzeb sejsmiki ładunki muszą być odpalane w czasie określonym z dokładnością do
1 milisekundy. Uzyskuje się to przy użyciu zapalników elektrycznych (rys. 24).
Zapalniki sejsmiczne mają zerowe opóźnienie co oznacza, że czas upływający od
momentu włączenia prądu do eksplozji jest mniejszy od 1 ms.
Rys. 25. Wiercenieotworów strzałowych [19]
Napięcie i moc urządzenia strzałowego muszą zapewnić przepływ przez obwód zapalnika
prądu o natężeniu kilku amperów.
Zapalniki elektryczne nie mogą być składowane w sąsiedztwie pracujących nadajników
radiowych, telefonów komórkowych itp. Uzwojenie zapalnika stanowi rodzaj anteny i fale
radiowe generują w nich napięcie elektryczne. Jest ono także kolektorem elektryczności
statycznej. Oba te czynniki mogą być przyczyną niekontrolowanego uruchomienia zapalnika.
W przypadku słabszych materiałów wybuchowych działanie zapalnika musi być
wzmocnione przez detonator –mały ładunek silnego materiału wybuchowego, który wytwarza
znacznie więcej energii niż zapalnik i ułatwia detonację głównego ładunku.
Przy szeregowym odpalaniu ładunków rozmieszczonych w jednej linii łączy się je lontem
strzelniczym np. prochowym. Pali się on z określoną szybkością powodując wybuch
kolejnych ładunków z określonym odstępem czasowym.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Charakterystyka eksplozji
Materiał wybuchowy odpalany jest na dnie otworu strzałowego i znaczna część energii
wybuchu może uciec „w powietrze”. Wypełnienie otworu strzałowego wodą zwiększa
sprzężenie energetyczne pomiędzy ładunkiem a skałami otaczającymi. Dodatkowo stratom
energii przeciwdziała zaczopowanie otworu strzałowego np. przez zasypanie ładunku
piaskiem.
Rys. 26. Efekt kierunkowy odpalenia ładunku wydłużonego [19]
Nieeksplozyjne źródła sejsmiczne
Rys. 27. Ciężarówka z zamocowanym na wysięgniku obciążnikiem[19]
Urządzeniem mechanicznym używanym do generowania fal sejsmicznych jest pojazd
z zamontowanym wysięgnikiem, z którego 3-tonowy, stalowy obciążnik o kształcie walca
może być zrzucany na ziemię z wysokości nie przekraczającej 3 m. Zwolnienia obciążnika
następuje na sygnał radiowy z kabiny operatora maszyny. Moment uderzenia w grunt
i wzbudzenia fali sejsmicznej rejestrowany jest przez akcelerometr zamocowany na
wierzchniej stronie obciążnika (rys. 27).
Najpopularniejszą obecnie metodą wzbudzania fal jest Vibrosejs. Wykorzystuje się
w niej zamontowane na samochodzie ciężarowym urządzenia wibratorowe generujące
(rys. 28), drgania o niskiej amplitudzie i zmieniającej się w sposób ciągły częstotliwości.
a)
b)
Rys. 28. Wibrator M-10/601 firmy MertzNomad: a) podczas transportu, b) podczas pracy [19]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
Ź
ródła wibratorowe są szybkie i łatwe w zastosowaniu, generując znane i powtarzalne
sygnały, potrzebują jednak do działania utwardzonego podłoża i źle działają na miękkim
gruncie.
Działo sejsmiczne Betsy działa na zasadzie opuszczanego ciężaru, lecz energia uderzenia
uzyskiwane jest nie przez opuszczanie dużego ciężaru z małą prędkością, lecz przez
wystrzeliwanie małego ciężaru z dużą prędkością. Urządzenie składa się z karabinu
zamocowanego pionowo na ramie podtrzymującej również stalową płytę i komorę bazową
otoczoną oponą lotniczą. Cały zestaw ma masę 90 kg i może być wykonany w wersji
przenoszonej na nosidłach lub w wersji przewożonej na czymś w rodzaju taczki (rys. 29).
a)
b)
Rys. 29. Betsy – Elektryczne działo sejsmiczne: a) działo podczas pracy, b) działa podczas transportu [19]
Karabin wystrzeliwuje w kierunku płyty pociski o masie 85 g z prędkością początkową
533 m/s. Energia uderzenia w płytę wynosi 12,2 kJ co odpowiada energii ciężaru o masie
3 ton spadającego z wysokości 3 m. Komora bazowa pochłania gazy wylotowe z lufy
i redukuje odrzut karabinu, jednak fala rozchodząca się w powietrzu wyraźnie zaznacza się na
sejsmogramie. Zaletą Betsy jest łatwość jego przemieszczania. W wersji kołowej może być
obsługiwana przez jednego człowieka, w wersji przenośnej przez dwóch do czterech ludzi.
Elektroniczne odpalanie karabinu pozwala dokładnie zarejestrować moment wzbudzenia.
Działo sejsmiczne jest bezpiecznym dla środowiska i względnie tanim źródłem wzbudzania
fal sejsmicznych (rys. 29).
Działa powietrzne są podstawowymi źródłami wzbudzania fal sejsmicznych w geofizyce
morskiej, są jednak także konstruowane w wersji lądowej (rys. 30). Działo używane
w geofizyce lądowej zamontowane jest wewnątrz masywnego stalowego dzwonu
spoczywającego na stalowej płycie. Spód dzwonu zamknięty jest elastyczną przeponą, a jego
wnętrze wypełnione wodą. W chwili odpalenia działa płyta uderza w grunt, a dzwon
odskakuje w górę. Odrzut kontrolowany jest przez masę bezwładną.
a)
b)
Rys. 30. Działo powietrzne a) budowa zestawu z działem powietrznym, b) widok ogólny [19]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Na rysunku 31 przedstawiono budowę działa powietrznego. Zasada jego działania jest
następująca. Do komory A dostarczane jest sprężone powietrze o ciśnieniu 14 MPa i przez
kanał w zaworze B wpompowywane jest do komory C.
Gdy otwarty zostanie zawór sterujący S wypadkowe parcie zacznie działać na zawór
B unosząc go do góry i otwierając wyloty powietrza P. Sprężone powietrze gwałtownie
opuści komorę C wywołując falę ciśnieniową w wodzie otaczającej działo.
Rys. 31. Budowa działa – opisy w tekście [19]
Urządzenie przewożone jest na samochodzie.
Rys. 32. Działo powietrzne w wersji lądowej [19]
Systemy akwizycji danych
Podstawowym zadaniem w pomiarach sejsmicznych jest zarejestrowanie sejsmogramów,
które są analogowymi funkcjami lub cyfrowymi szeregami czasowymi amplitudy drgań
gruntu w chwili przejścia impulsu sejsmicznego. Zarejestrowanie sejsmogramu wymaga
przetworzenia drgań gruntu na zmienny sygnał elektryczny, wzmocnienia, przefiltrowania
i zapisania go w pamięci urządzenia (pamięć komputera, rejestrator magnetyczny, pisak
z taśmą papierową). Ponieważ w czasie pomiaru odbierane są sygnały od dużej ilości
detektorów drgań system rejestracji zwykle jest wielokanałowy.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Najbardziej rozpowszechnione są geofony z ruchomą cewką. W geofonie takim
cylindryczna cewka (C) zawieszona jest na sprężynie w polu magnesu stałego (M),
przytwierdzonego trwale do obudowy czujnika. Jeden z biegunów magnesu znajduje się
wewnątrz cewki, drugi biegun otacza ją z zewnątrz. Zawieszona cewka stanowi oscylator,
którego częstotliwość rezonansowa określona jest przez masę cewki i współczynnik
sprężystości sprężyny.
Geofony to przetworniki elektromechaniczne drgań.
Rys. 33. Zasada działania geofonu [19]
Rys. 34. Schemat geofonu [19]
Rys. 35. Geofon ustawiony na gruncie [19]
Geofon może być zamocowany w miękkim gruncie przy pomocy szpilkowego supportu,
lub ustawiany bezpośrednio na twardym podłożu.
W czasie przejścia fali sejsmicznej zawieszona na sprężynie cewka porusza się względem
magnesu zamocowanego do obudowy, co powoduje generowanie różnicy potencjału na końcach
uzwojenia cewki. Ruch oscylacyjny cewki jest tłumiony, gdyż płynący przez nią prąd wytwarza
pole magnetyczne oddziałujące z polem magnesu, tak by przeciwstawić się ruchowi cewki.
Dodatkowym źródłem tłumienia jest oddziaływanie pola cewki z metalową obudową czujnika.
Aby zwiększyć tłumienie, w obwód cewki włącza się także opornik kontrolujący
natężenie prądu w cewce. Dobór odpowiedniego tłumienia pozwala na wierne
odzwierciedlenie drgań gruntu przez generowany sygnał. Zbyt małe tłumienie może
doprowadzić do wzbudzenia w cewce drgań rezonansowych, zbyt duże tłumienie znacząco
wpływa na zmniejszenie czułości urządzenia.
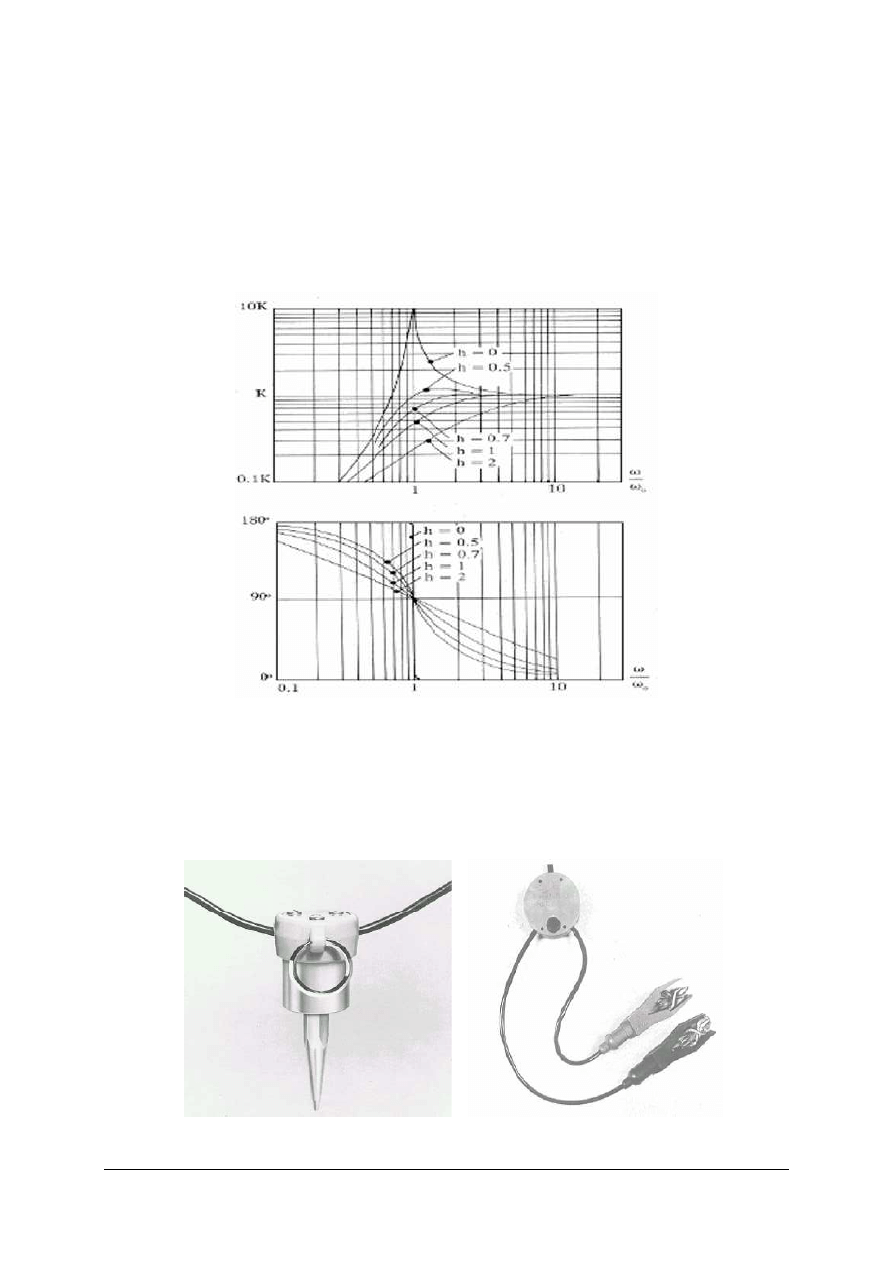
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
Typowe tłumienie stanowi 0,7 wartości krytycznej, przy której czujnik nie
zarejestrowałby pobudzenia impulsowego. Charakterystyka amplitudowa geofonu jest płaska
powyżej częstotliwości rezonansowej. Jego widmo fazowe przy częstotliwości rezonansowej
ograniczone jest do przesunięć fazowych bliskich dziewięćdziesiąt stopni i dąży do wartości
bliskich zero dla dużych częstotliwości. Dobry geofon powinien mieć częstotliwość
rezonansową dużo poniżej pasma częstotliwości rejestrowanego sygnału sejsmicznego.
Częstotliwość rezonansowa większości dostępnych na rynku geofonów zawiera się pomiędzy
4–15 Hz. Powyżej częstotliwości rezonansowej amplituda sygnału jest proporcjonalna do
szybkości ruchu cewki.
Rys. 36. Charakterystyka amplitudowa i fazowa geofonu [19]
Czułość geofonu, mierzona w woltach na jednostkę prędkości zależy od ilości zwojów
cewki i natężenia pola magnetycznego, stąd duże czułości osiąga się zwiększając rozmiary
geofonu. Geofony z ruchomą cewką są czułe tylko na składowe drgań wzdłuż osi cewki, więc
geofony z pionową cewką najlepiej rejestrują fale P odbite od granic podpowierzchniowych.
Dla rejestracji fal poprzecznych spolaryzowanych poziomo (SH) niezbędne są geofony
z poziomo zamocowaną cewką.
a)
b)
Rys. 37. Nowoczesny model geofonu: a) widok z boku, b) widok z góry [19]
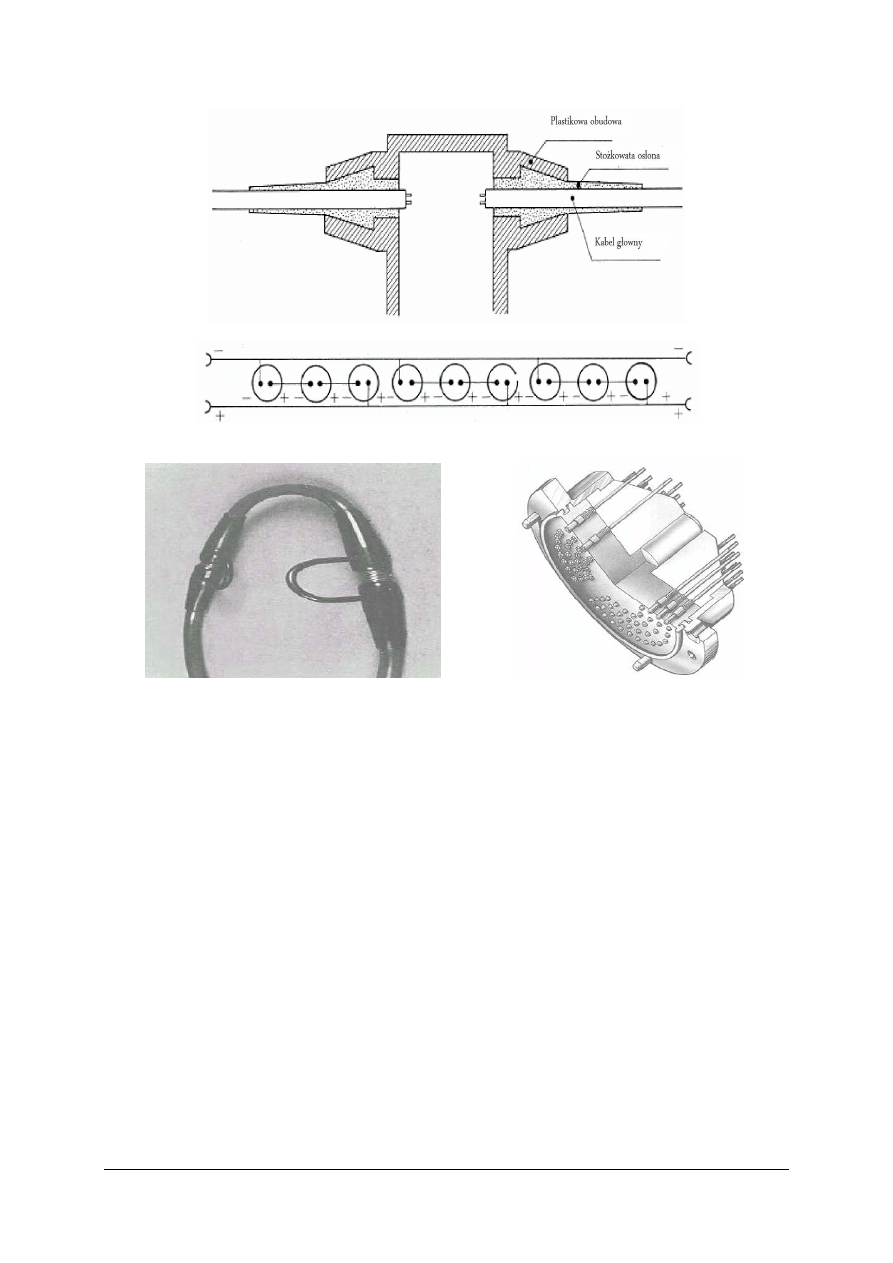
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Rys. 38. Wyprowadzenia kabla z obudowy geofonu
[
19]
Rys. 39. Układ 9-ciu geofonów połączonych szeregowo – równolegle [19]
Rys. 40. Wyprowadzenia na kablu sejsmicznym [19]
Rys. 41. Przyłącze do aparatury pomiarowej [19]
Geofony mogą pracować indywidualnie lub w zestawach, połączone szeregowo lub
równolegle (rys. 39).
Kabel sejsmiczny jest wielożyłowym kablem zawierającym po jednej parze przewodów
na każdy kanał transmisyjny. Na kablu znajdują się rozmieszczone w równych odstępach
parzyste wyprowadzenia, służące podłączeniu geofonów. Wyprowadzenia dla pojedynczego
geofonu różnią się szerokością, odpowiednio do szerokości zacisków geofonowych.
Zapewnia to podłączenie geofonu do właściwej pary przewodów w kablu zawsze w ten sam
sposób (rys. 38).
Wzmacniacze sejsmiczne powinny wzmacniać sygnały w przedziale częstotliwości od
kilku do kilkuset Hz o bardzo szerokim zakresie amplitud rzędu 120 dB
(AMAX/Amin = 1000000). Większość wzmacniaczy sejsmicznych zawiera filtry dolno-
i górnoprzepustowe oraz filtry wycinające dla częstotliwości zbliżonych do częstotliwości
sieci energetycznych. Sposób działania wzmacniacza zależy od stosowanego urządzenia
zapisującego i musi być dostosowany do jego zakresu dynamicznego, który zwykle jest
niższy niż zakres dynamiczny wzmacniacza. Wzmocnienie najsilniejszych sygnałów powinno
być mniejsze niż słabych. Stosuje się np. automatyczną kontrolę wzmocnienia –
charakterystyka wzmacniacza jest liniowa tylko do pewnej amplitudy sygnału, a powyżej niej
ulega spłaszczeniu. Innym rozwiązaniem jest system wzmocnienia zmiennego w czasie,
w którym wzmocnienie jest początkowo niskie i rośnie z czasem. Wówczas sygnały
docierające z geofonów położonych najdalej od źródła są wzmacniane najsilniej.
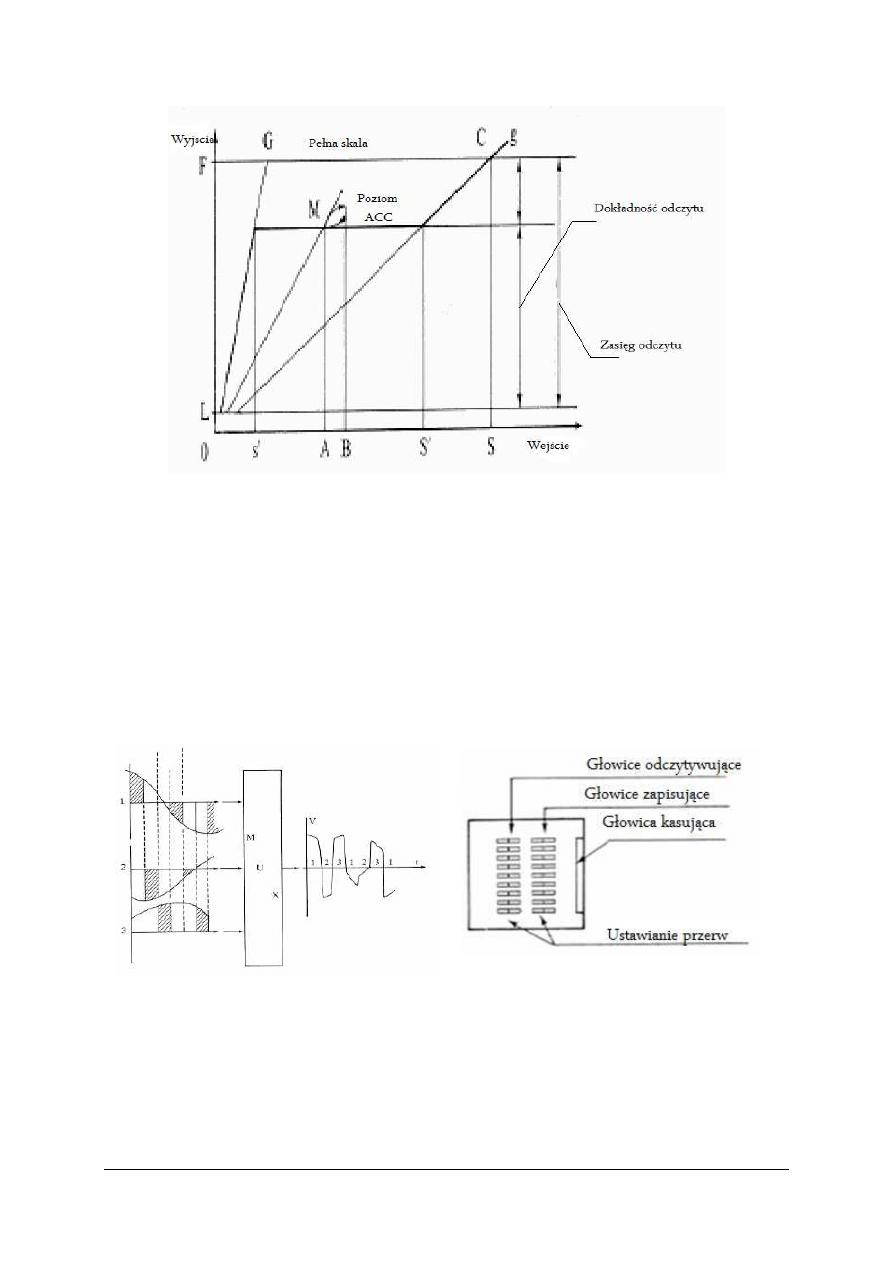
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Rys. 42. Charakterystyka wzmacniacza sejsmicznego: F – maksymalny poziom sygnału wyjściowego,
L – minimalny odróżniany od zera poziom sygnału wyjściowego, S – maksymalny sygnał wejściowy
AGC – poziom automatycznej regulacji wzmocnienia Wzmocnienie, którego miarą jest nachylenie
prostej łączącej początek układu z pkt M na charakterystyce, zmienia się od dużego (G) dla słabych
sygnałów wejściowych do małego (g) dla dużych sygnałów wejściowych [19]
Rejestratory sejsmiczne
W cyfrowych systemach zapisu sygnałów sejsmicznych stosuje się przetworniki A/C wraz
z urządzeniem przełączającym – multiplekserem. Multiplekser łączy przetwornik kolejno
z wszystkimi kanałami sejsmicznymi. W danej chwili wielkość sygnału w kanale sejsmicznym
jest próbkowana i przetwarzana na postać cyfrową. Szybkość przełączania zależy od ilości
kanałów sejsmicznych i stosowanego czasu próbkowania. Przykładowo, gdy w 50-kanałowym
rejestratorze ustalimy czas próbkowania na 2,5 ms czas przeznaczony na przyłączanie kanału do
przetwornika dla odczytania poziomu sygnału wynosi 2,5/50 = 0,05 ms.
Rys. 43. Multipleksacja [19]
Rys. 44. Głowica zapisująca [19]
Multipleksacja powoduje zapisywanie danych w postaci szeregowej tzn. kolejno
zapisywane są próbki z poszczególnych kanałów, po czym cykl się powtarza (rys. 43). Dla
wyświetlenia sygnałów na ekranie monitora trzeba wówczas zastosować demultipleksację
i przetwornik C/A.
W rejestratorach cyfrowych zapisu dokonuje się na taśmie magnetycznej. Powszechnie
akceptowanym standardem jest 9-ścieżkowy zapis na taśmie o szerokości półcala z gęstością
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
zapisu 1600 bitów/cal, lecz wzrasta zastosowanie gęstości zapisu 6250 bitów/cal. Jedynym
ograniczeniem zakresu dynamicznego rejestratora cyfrowego jest długość stosowanego słowa
maszynowego. Natomiast ograniczeniem technicznym jest szybkość przewijania taśmy,
większa dla zapisu słów maszynowych o większej liczbie bitów. Przeważnie stosuje się zapis
o długości 16 do 20 bitów. Jeden bit zapisu musi być przeznaczony na zapisanie zwrotu
amplitudy sygnału. Zakres dynamiczny rejestratora cyfrowego można zwiększyć przez
stosowanie zapisu zmiennoprzecinkowego (cecha + dwubitowa mantysa). W rejestratorach
zapisuje się także chwilowy poziom wzmocnienia w czasie próbkowania sygnału, aby można
było odtworzyć rzeczywiste wartości amplitudy sygnału.
Rys. 45. Układ głowic w rejestratorze [19]
Rys. 46. Przenośny rejestrator magnetyczny [19]
Przykłady różnych systemów akwizycji danych
Czujnik drgań parasejsmicznych CSPBG-3D stanowi głowicę zawierającą 3 pionowe
geofony 10 Hz i układy elektroniczne. Geofony rozstawione są co 120
o
pochylone względem
płaszczyzny podstawy pod kątem 54,73
o
co zapewnia wzajemną prostopadłość ich osi
(rys. 47). Drgania podstawy głowicy powodują powstanie sił elektromotorycznych
w cewkach geofonów. Układ elektroniczny przetwarza otrzymane z geofonów sygnały przez
wprowadzenie symulacji ujemnych oporności i filtracji w torze każdego geofonu do
wprowadzenia ich do wspólnego układu wagowego transformacji współrzędnych. Na wyjściu
otrzymujemy trzy niezależne od siebie sygnały Z, N, E (w układzie prostokątnym), których
wielkość zależy od kierunku drgań podstawy głowicy. Warunkiem poprawnego działania
czujnika jest dokładne wypoziomowanie jej obudowy (rys. 48). Głowica CSPBG-3D
przeznaczona jest do pomiarów drgań jej podłoża (w miejscu zainstalowania) wywołanych
bliskimi wstrząsami sejsmicznymi, eksplozjami, pracami budowlanymi (kafary, wibrowalce),
ruchem drogowym (ciężkie pojazdy, pociągi, metro), jak również maszynami pracującymi
w pobliskich fabrykach. Przez pomiar trzech składowych sygnału drgań możliwe jest
określenie wielkości tych drgań jak również kierunku, z którego pochodzą.
Do celów dokumentacyjnych głowica powinna współpracować z wielokanałowym
szybkim rejestratorem np. typu WiRek-HDD (rys. 49) lub Flash Data Logger. Odpowiednie
programy komputerowe umożliwiają odczyt historii drgań i przetwarzanie danych. Bieżącą
ocenę wielkości drgań można dokonać przy pomocy oscyloskopu elektronicznego.
Rys. 47. Czujnik
drgań
parasejsmicznych
CSPBG-3D [20]
Rys. 48. Czujnik na stanowisku
roboczym [20]
Rys. 49. Wirek-HDD
podczas
pomiarów [20]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
Aparatura współpracująca
Podgląd sygnałów: oscyloskop elektroniczny.
Rejestracja sygnałów:
A
Rejestrator cyfrowy typu WiRek-HDD 6 kanałowy, zapis na twardym, wymiennym dysku
interfejs RS-232, zasilanie12V software do zobrazowania i obróbki rejestrowanych sygnałów
B
Rejestartor cyfrowy typu Flash Data Logger 6 kanałowy, zapis na FLASH MEMORY
interfejs RS-232, zasilanie 12V software do zobrazowania i obróbki rejestrowanych sygnałów
W obu typach rejestratorów możliwe jest sprzęgnięcie ich z odbiornikiem czasu GPS dla
przypisania czasu rejestrowanym zjawiskom.
Tabela. 2 Dane techniczne [20]
Głowica CSPBG-3D
pomiar 3 składowych drgań Z, N-S, E-W
wzajemnie prostopadłych
Czujnik drgań
elektromagnetyczny geofon pionowy 10Hz (prod.
PBG)
Czułość
0,1 mm/Vs
2
Oporność wyjściowa kanału
20W
Pasmo
0,5–100Hz
Czas nagrzewania wstępnego
minimum 2min
Powiększenie
0,6 Vs
2
/m
Zakres temperatury pracy
0–35
o
C
Zakres
+/- 3 m/s
2
Poziomowanie
wg. poziomnicy oczkowej na obudowie
Ś
rednie napięcie wyjściowe kanału
+2,5V
Orientacja
zgodnie z symbolem na obudowie
Zasilanie
+12V/50mA
Wymiary
f140mm x 120mm
Max. syganał wyjściowy kanału
3V p-p
Ciężar
ca. 2kg
Wyjście
gniazdo DB-9/M
Filtry
Opcja FIR USREDNIANIE włącza filtr będący średnią arytmetyczną liczoną z wartości
sygnału, próbkowanego z częstotliwością 4000 próbek na sekundę, zmierzonych miedzy
dwoma kolejnymi taktami ustawionego próbkowania. Dla przykładu dla ustawionego
próbkowania 1 sekunda średnia liczona jest z 4000.pomiarów, a dla próbkowania 500 Hz
ś
rednia jest liczona z 8 pomiarów. Rysunek 50 przedstawia odpowiedzi na impuls skoku
jednostkowego dla częstotliwości próbkowania 100 Hz.
Filtr FIR USREDNIANIE nie wycina wystarczająco silnie z sygnału częstotliwości
większych niż połowa częstotliwości próbkowania. Jeżeli sygnał wejściowy zawiera takie
częstotliwości i wybrana jest opcja FIR USREDNIANIE lub FIR WYLACZONY to nastąpi
zjawisko przeplotu.
Opcja FIR MINIMALNY i FIR LINIOWY włącza cyfrowe filtry antyprzeplotowe typu
FIR (filtr o skończonej odpowiedzi impulsowej). Sygnał filtrowany tymi filtrami ma
amplitudową charakterystykę częstotliwościową płaską, aż do 0,4 częstotliwości
próbkowania, natomiast dla częstotliwości większych niż połowa częstotliwości próbkowania
tłumienie filtru jest większe niż 90dB.
Filtr FIR o liniowej charakterystyce fazowej powoduje najmniejsze zniekształcenie
sygnału, natomiast wnosi największe opóźnienie, jednakowe dla wszystkich częstotliwości
rejestrowanego sygnału. Wartość tego opóźnienia można wyliczyć ze wzoru:
t
o
=0.25 · (2,5+63) · T
p
gdzie Tp określa wybrany okres próbkowania.
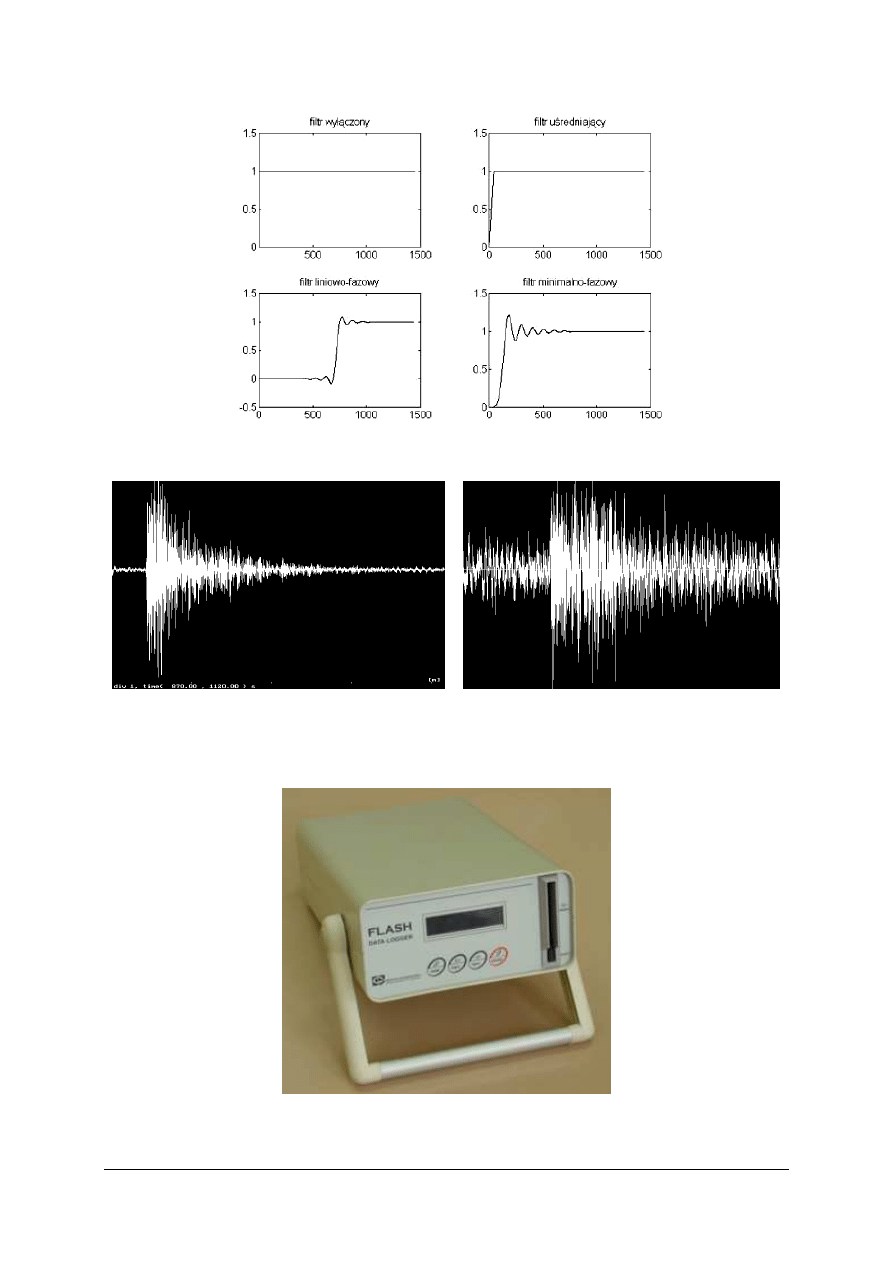
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
Rys. 50. Porównanie odpowiedzi skokowej filtrów FIR dla częstotliwości próbkowania 100 Hz [20]
Rys. 50. Przykładowe rejestracje zjawisk wykonane za pomocą rejestratora [20]
Rejestrator Flash Data Logger ( w skrócie FDL) jest rejestratorem do rejestracji różnych
zjawisk, głównie geofizycznych (rys. 51).
Rys. 51. Widok rejestratora [20]
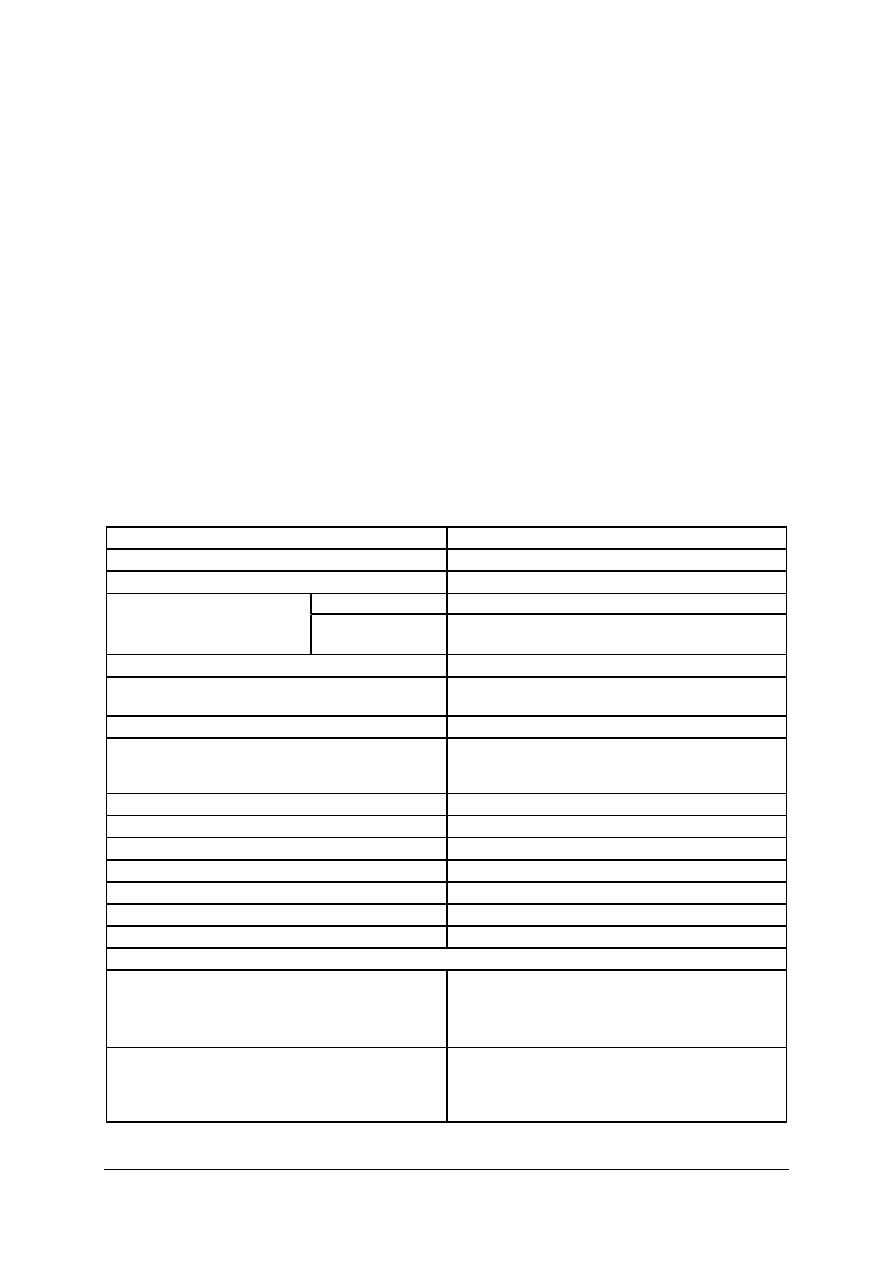
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Powstał on jako wynik rozwoju poprzednich wersji rejestratorów WiRek. Niektóre jego
parametry są powieleniem poprzednich jego wersji: Główne z nich to:
−
zastosowanie procesora sygnałowego DSP56002
−
cyfrowa filtracja sygnału filtrami typu FIR i IIR
−
współpraca z zewnętrznym wzorcem czasu (GPS lub DCF)
−
klawiatura , wyświetlacz itp.
Pozostałe różnice są jednak tak istotne, że rejestrator ten należy traktować jako nowe
rozwiązanie. Główne zmiany dotyczą:
−
zapisu danych na pamięciach fleszowych typu CompactFlash lub SmartMedia,
−
przetwornik sigma-delta o rozdzielczości 24 bit,
−
inny format danych zapisywanych na kartach pamięci,
−
inny format danych na wyjściu interfejsu RS232, co powoduje konieczność stosowania
oddzielnego oprogramowania.
Zastosowanie pamięci fleszowych zamiast dysku mechanicznego miało na celu:
−
zmniejszenie zużycia energii i mocy potrzebnej do zasilania rejestratora,
−
zwiększenie niezawodności poprzez zastąpienie dysku mechanicznego, wrażliwego na
wstrząsy, pamięcią elektroniczną, co jest szczególnie istotne w różnego rodzaju
pomiarach terenowych.
Tabela 3. Dane techniczne rejestratora FDL [20]
−
przetwornik A/C
sigma-delta 24bit
−
liczba kanałów
6
−
zegar ustawiany
ręcznie, z DCF lub GPS
−
filtracja rejestrowanych
sygnałów
analogowa
200 Hz,18 dB/oct – filtr antyaliasyjny
cyfrowa
−
filtr typu FIR – dolnoprzepustowy*
−
filtr typu IIR – górnoprzepustowy**
−
zakres napięć wejściowych
-10Vdo +10V
−
maksymalna
częstotliwość
rejestrowanego
przebiegu
0.35*f
−
oporność wejściowa
Rwej > 20kW
−
okres próbkowania sygnału
1,25 ms, 2,5 ms, 5 ms, 10 ms, 20 ms, 50 ms, 00 ms,
200 ms, 500 ms, 1 sek., 2 sek., 5sek., 10 sek., 20 sek.,
0.5 min, 1 min,
−
rejestracja danych cyfrowych
na własnej karcie pamięci typu Compact Flash,
−
możliwość obróbki sygnału
filtrami cyfrowymi FIR i IIR
−
zasilanie zewnętrzne
12V DC (11–14,5 V) odizolowane od masy rejestratora,
−
ś
redni pobór prądu
około 300mA
−
temperatura pracy rejestratora
od -5 do +40 oC
−
masa przyrządu
około 3,0 kg
−
wymiary
90x262x260 mm.
* FIR – dolnoprzepustowy,
może
pracować
w następujących trybach
−
wyłączony
−
ś
rednia za okres próbkowania
−
antyprzeplotowy liniowo-fazowy
−
antyprzeplotowy minimalno-fazowy
** IIR – górnoprzepustowy,
może
pracować
w następujących trybach
−
wyłączony
−
włączony, stała czasu: 12,5; 25; 50; 100; 200;
400; 800; 1600; 3200; 6400; 12800; 25600;
51200; 102400; 204800 okresu próbkowania
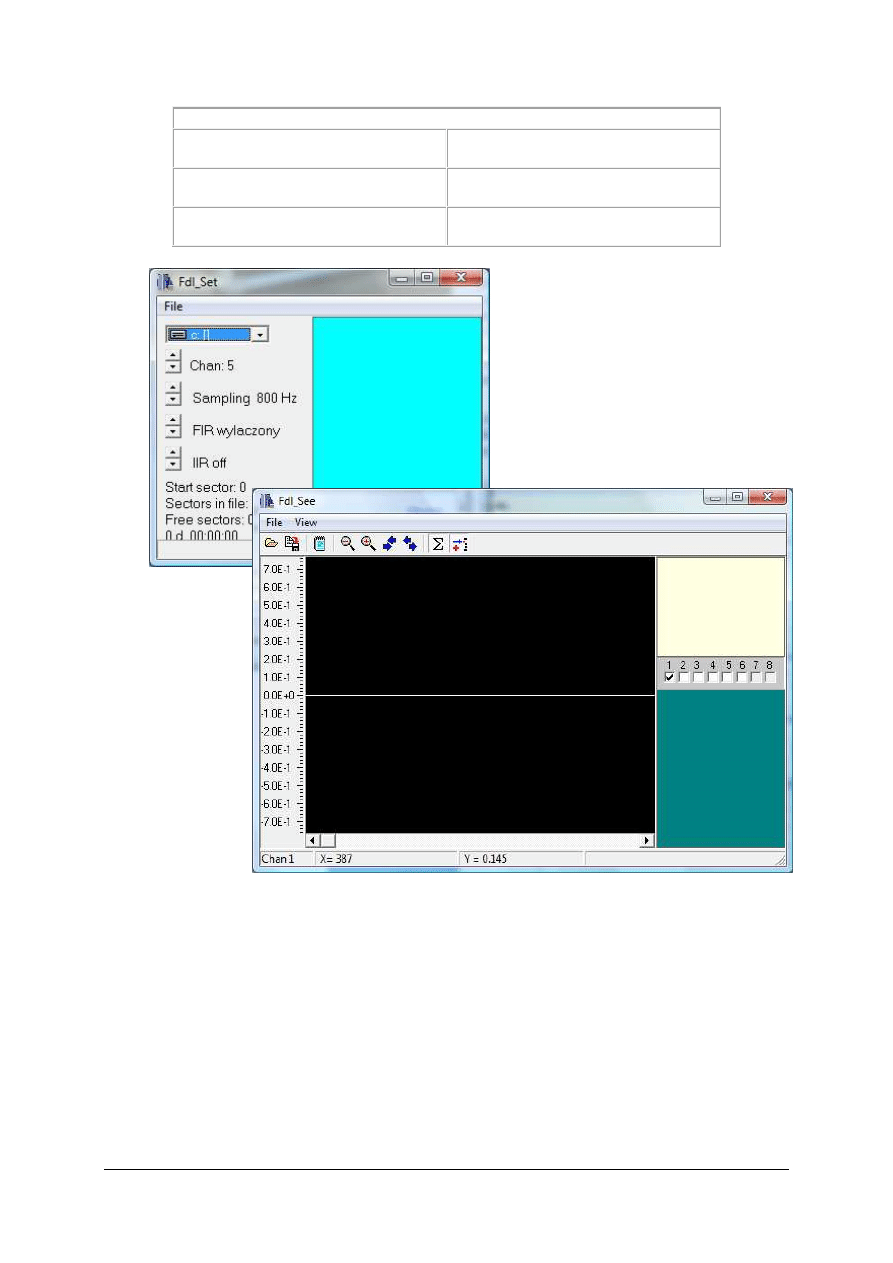
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
Do obsługi i obróbki rejestrowanych zjawisk opracowane zostały trzy programy:
Fdl_see
program do przeglądania zarejestrowanych
zapisów (okno programu)
Fdl_view
program do podglądu rejestracji w czasie
rzeczywistym (okno programu)
Fdl_set
program
do
ustawiania
parametrów
rejestracji (okno programu)
Rys. 52. Widok okien programu Fdl_Set, Fdl_See [20]
W celu wizualizacji bieżących wyników pomiarów stosuje się wielokanałowe rejestratory
oscyloskopowe. Umożliwiają one zapamiętanie sygnału cyfrowego oraz sumowanie sygnałów
z wielokrotnych wzbudzeń. W aparaturach przemysłowych stosuje się również rejestrację na
papierze światłoczułym
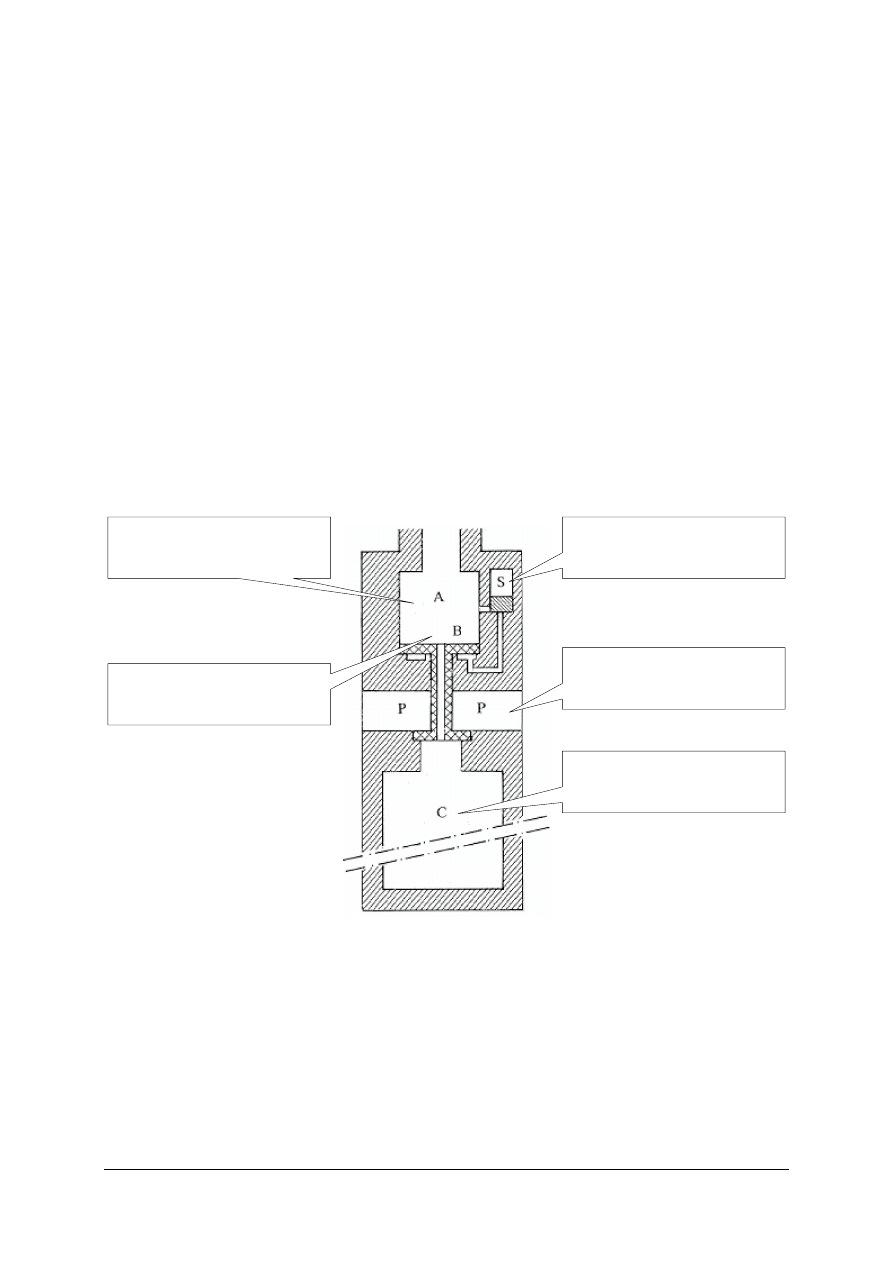
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jakie środki techniczne stosujemy do wykonania badań sejsmicznych?
2.
Co to są źródła sejsmiczne?
3.
Jakie typowe materiały wybuchowe stosujemy w sejsmice?
4.
Do czego służą zapalniki?
5.
Jakie mechaniczne urządzenia stosujemy do wzbudzania fal sejsmicznych?
6.
Z jakich elementów składa się działo powietrzne?
7.
Do czego służą geofony?
8.
Jakie funkcje spełniają wzmacniacze sejsmiczne?
9.
Jakie funkcje spełniają rejestratory sejsmiczne?
10.
Z jakich elementów składa się typowa aparatura do badań sejsmicznych?
4.3.3. Ćwiczenia
Ć
wiczenie 1
Objaśnij budowę i zasadę działania działa powietrznego.
Rysunek do ćwiczenia 1 [19]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
rozpoznać elementy działa powietrznego przedstawionego na rysunku,
2)
wpisać nazwy elementów działa,
3)
objaśnić sposób generowania wstrząsów przez działa powietrzne,
4)
zaprezentować wyniki ćwiczenia.
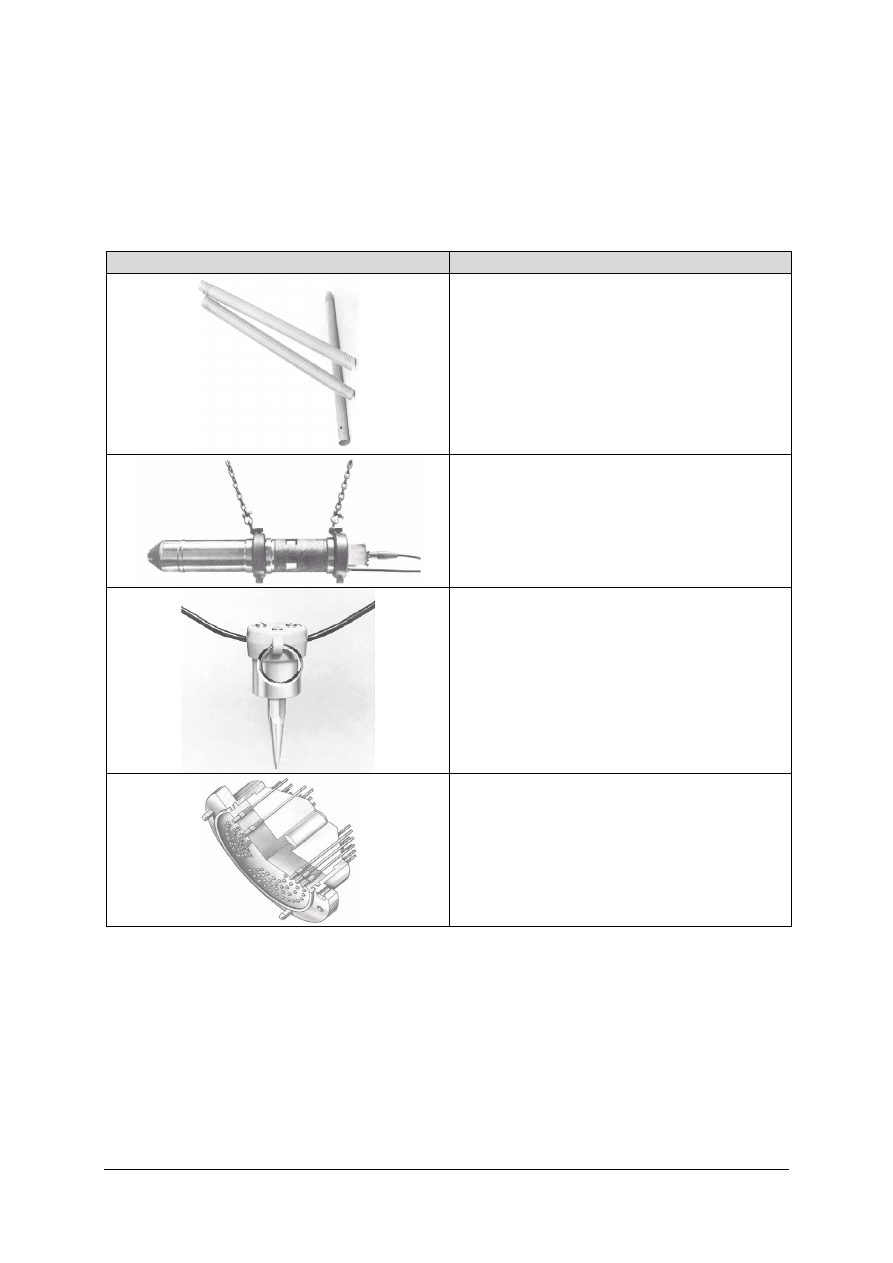
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
Wyposażenie stanowiska pracy:
−−−−
dokumentacja techniczna działa powietrznego,
−−−−
literatura zgodna z punktem 6 poradnika dla ucznia.
Ć
wiczenie 2
Rozpoznaj przeznaczenie przedstawionych elementów stosowanych do badań
sejsmicznych.
Prezentowany element
Objaśnienie
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
rozpoznać elementy przedstawione na rysunkach,
2)
wpisać nazwy elementów,
3)
zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
literatura zgodna z punktem 6 poradnika dla ucznia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
Ć
wiczenie 3
Przedstaw w postaci schematu blokowego elementy i kolejność działania typowej
aparatury do pomiarów sejsmicznych.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
dobrać elementy aparatury,
2)
określić kolejność połączenia elementów,
3)
narysować schemat blokowy,
4)
zaprezentować wykonane ćwiczenie,
5)
dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
literatura zgodna z punktem 6 poradnika dla ucznia.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
rozpoznać środki techniczne stosowane podczas badań sejsmicznych?
2)
rozróżnić sposoby wzbudzania drgań sejsmicznych?
3)
wyjaśnić działanie działa powietrznego?
4)
objaśnić działanie geofonu?
5)
objaśnić zdania wzmacniaczy sejsmicznych?
6)
scharakteryzować rejestratory drgań sejsmicznych?
7)
rozróżnić pojęcie multipleksacja i demultipleksacja?
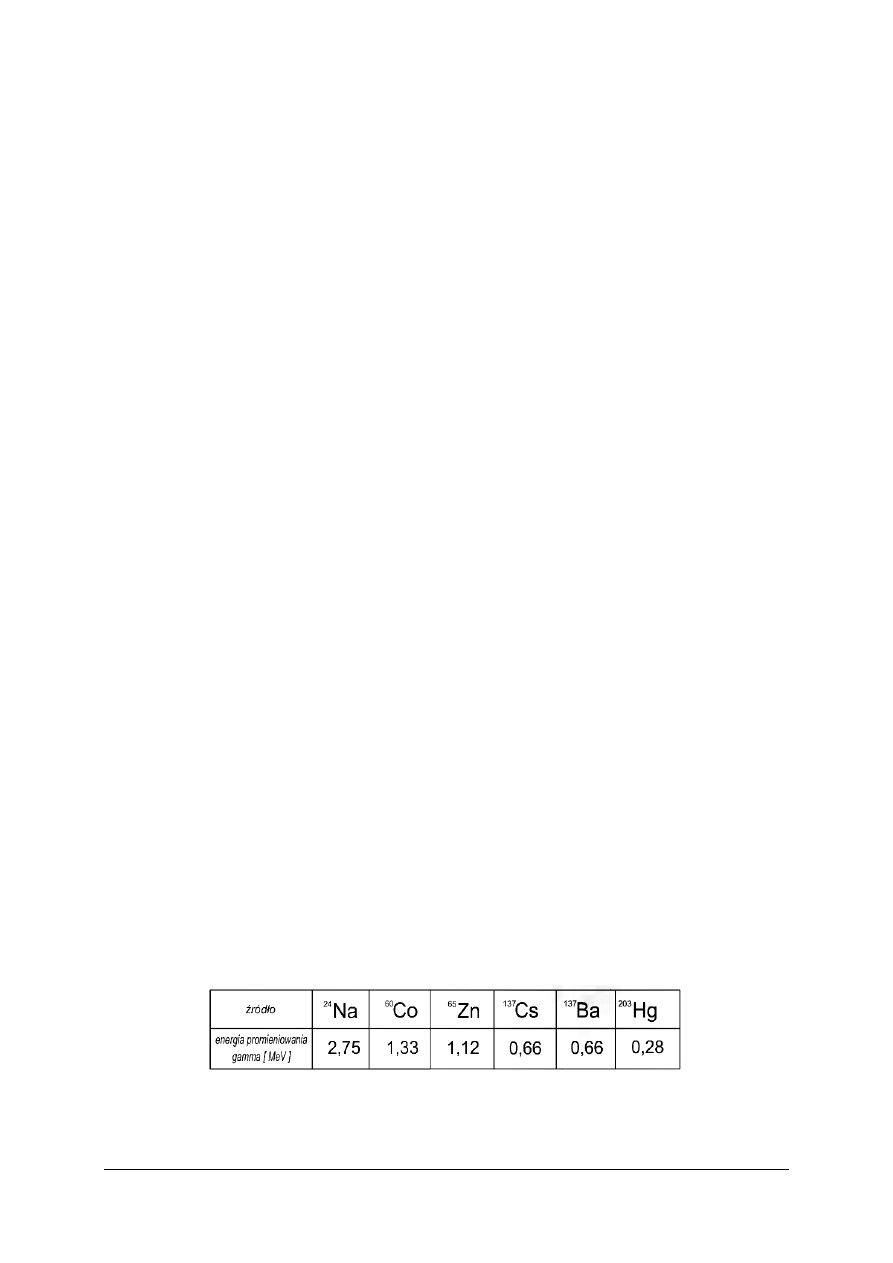
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
4.4.
Obsługiwanie aparatury do badań w otworach wiertniczych
4.4.1. Materiał nauczania
Profilowanie akustyczne jest otworową metodą, która opiera się na zmianach własności
sprężystych ośrodka skalnego. Miarą sprężystych własności skał może być prędkość
rozchodzenia się w skałach fal sprężystych. Najczęściej mierzy się prędkości fal podłużnych
V
P
i poprzecznych V
S
. Znajomość obu tych wielkości pozwala wyznaczyć sprężyste
własności skał (moduł Younga, stałą Poissona) w warunkach ich naturalnego zalegania.
Przedmiotem pomiaru w trakcie profilowania wykonywanego sondą SAM-60 jest
akustyczny pełny obraz falowy, czyli zapis fal, które przychodzą do rejestratorów
w określonym interwale czasowym, wynoszącym w omawianej sondzie 2000 ms. Źródłem
sygnału akustycznego w sondzie jest nadajnik magnetostrykcyjny emitujący falę
o częstotlowości 35 kHz, zaś odbiornikami są dwa oddalone od siebie o D l = 50 cm
rejestratory piezoelektryczne. Odległość D l zwana jest bazą sondy. Sonda zasilana jest
z aparatury naziemnej jednożyłowym kablem pancernym, którym przesyłany jest również
sygnał pomiarowy odbierany i przetwarzany wstępnie w odpowiednim interfejsie łączącym
aparaturę z mikrokomputerem (notebook) sterującym gromadzeniem danych pomiarowych.
Do gromadzenia i wizualizacji danych podczas pomiaru służy program ADL. Podobny
program o nazwie ADA pozwala wykonywać interpretację danych pomiarowych.
Program ADL umożliwia zapis pełnych obrazów falowych (czyli zmian amplitudy drgań
rejestrowanych przez odbiorniki w funkcji czasu) oraz dodatkowo zapis pojedynczych czasów
prostych T1 i T2 oraz czasu interwałowego D T. Wartość T1 oznacza czas, który upływa od
momentu wysłania sygnału ze źródła w nadajniku (trzask w sondzie) do momentu
zarejestrowania pierwszego wstąpienia w pierwszym rejestratorze, wartość T2 oznacza
analogiczny czas dla drugiego rejestratora. Czas interwałowy jest różnicą obydwu w/w
czasów: D T = (T2 – T1)/D l. Czas interwałowy D T wyrażany jest w [m s/m] i stanowi
wielkość charakterystyczną badanych skał, używaną jako ekwiwalent prędkości rozchodzenia
się fal akustycznych: V = 106/D T [m/s].
Profilowanie średnicy otworu polega na pomiarze zmian średnicy otworu wynikających
z różnej odporności mechanicznej przewiercanych skał.
Kawernomierz, czyli urządzenie do pomiaru średnicy składa się z trzech lub czterech ramion
dociskanych sprężynami do ścian otworu. Wychylenia tych ramion przenoszone są na ruchy
suwaka opornicy umieszczonej w sondzie, co daje możliwość powiązania wielkości
rejestrowanego w spadku napięcia ze średnicą otworu.
Detektory promieniowania jądrowego
Profilowanie
otworów
wiertniczych
odbywa
się
z
wykorzystaniem
metod
promieniotwórczych, w których w zależności od metody wykorzystuje się różne źródła
promieniowania.
Tabela 4. Ważniejsze źródła promieniowania gamma [14]
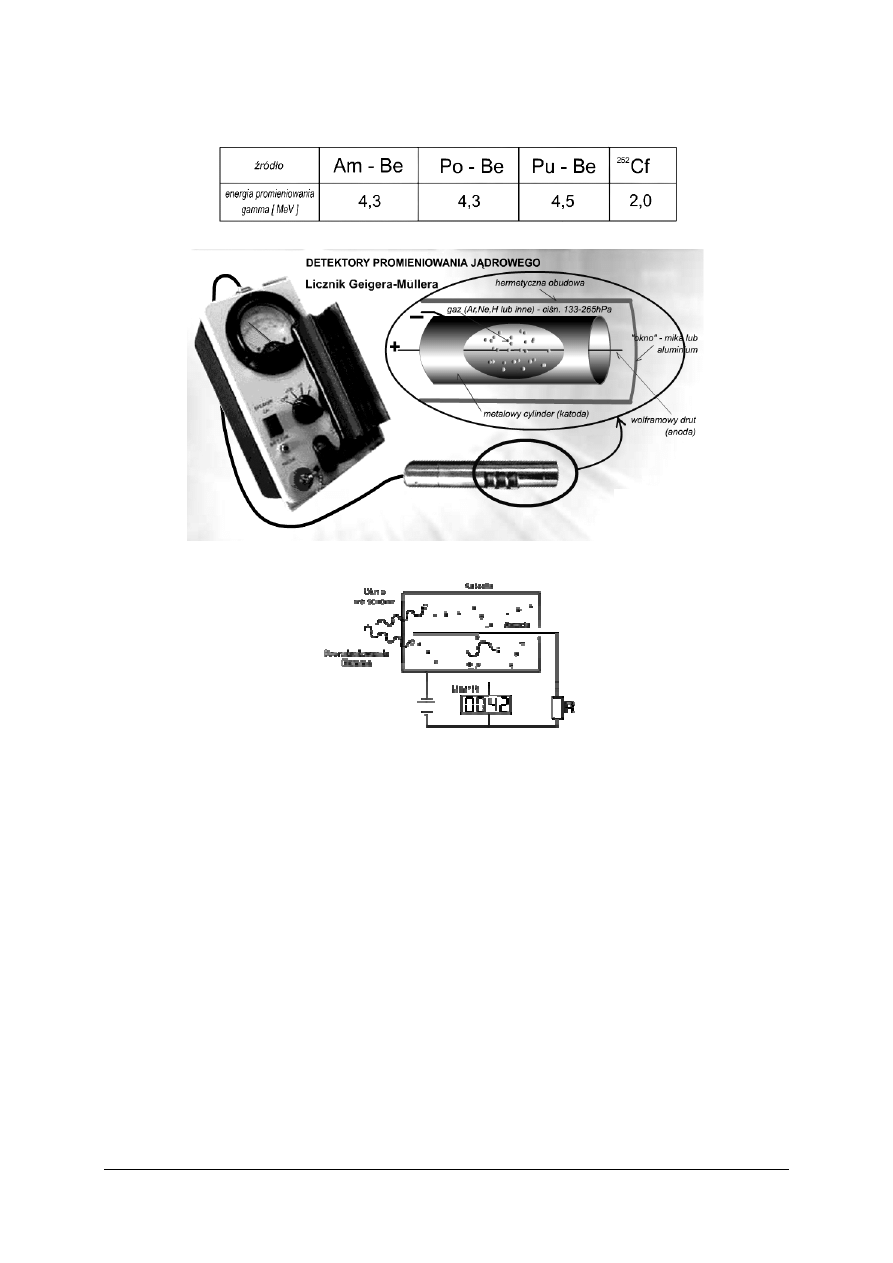
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
Tabela 5. Ważniejsze izotopowe i rozszczepieniowe źródła neutronów [14]
Rys. 53. Elementy budowy licznika [14]
Rys. 54. Schemat działania licznika Geigera [14]
Konstrukcja licznika – jak widać na rysunku 53 – sprowadza się do szczelnego szklanego
cylindra i umieszczonej w nim rury metalowej (z miedzi lub aluminium), która stanowi
elektrodę ujemną (katodę). Przez środek rury – katody przebiega cienki drut stanowiący
elektrodę dodatnią – anodę. Cylinder szklany wypełniony jest mieszaniną gazów: ok. 90%
argonu lub innego gazu szlachetnego i ok. 10% par alkoholu. Ciśnienie mieszaniny gazów
w cylindrze wynosi kilkadziesiąt hektopaskali, a zatem znacznie mniej od atmosferycznego.
Z elektronicznego punktu widzenia jest to zatem lampa gazowana podobna trochę do
gazotronu albo gazowanej fotodiody z usuniętym elementem światłoczułym i z różnicami
wynikającymi z innej zasady działania.
Działanie licznika
Elektrody muszą być spolaryzowane napięciem rzędu kilkuset woltów. Jeśli we wnętrzu
licznika znajdzie się np. cząstka alfa, to wywoła jonizację atomów gazu wzdłuż swojego toru
ruchu. Powstałe w wyniku jonizacji elektrony i jony gazu przyspieszane są w polu
elektrycznym, a następnie zderzają się z innymi atomami powodując dalsze jonizacje
i w efekcie wyładowanie lawinowe. Wyładowanie to objawia się w zewnętrznym obwodzie
elektrycznym zamkniętym rezystorem
R powstaniem impulsu napięcia, będącym skutkiem

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
wychwytywania przez cylindryczną katodę jonów gazu. Impuls ten przez kondensator
kierowany jest do układu pomiarowego (rys. 54). Czas trwania impulsu, wywołanego
pojedynczą cząstką, tzn. czas upływający od chwili rozpoczęcia wyładowania lawinowego do
jego wygaśnięcia nazywany jest czasem martwym licznika. Istotne jest, aby był on jak
najkrótszy (wówczas możliwe jest odróżnienie od siebie kolejnych, szybko po sobie
nadlatujących cząstek). Wpływ na to ma zarówno konstrukcja elektrod (ich wielkość
i odległość od siebie), ciśnienie mieszaniny gazów, jak i skład tej mieszaniny: np. pary
alkoholu tłumią wyładowania, a czas martwy przeciętnego licznika jest rzędu stu
mikrosekund.
Za kondensatorem układ pomiarowy typowego licznika zawiera obwody zliczające
pojawiające się impulsy i przekształcające je w sygnały dźwiękowe (trzaski – to najwcześniej
stosowana wersja), błyski, albo na wskazania bądź to wskaźnika wychyłowego, bądź to
wyświetlacza alfanumerycznego.
Detektory scyntylacyjne
Licznik scyntylacyjny – detektor promieniowania jonizującego. Podstawa działania jest
zjawisko scyntylacji, zachodzące w niektórych substancjach pod wpływem bombardowania
ich cząstkami naładowanymi. Podczas przechodzenia przez scyntylator cząstki jonizującej
wytwarzane są jony i elektrony, które z kolei są źródłem emisji fotonów, obserwowanej
w postaci błysków świetlnych. Ogromny rozwój techniki liczników scyntylacyjnych wiąże się
z rozwojem technologii produkcji odpowiednich do tych celów scyntylatorów, nie
pochłaniających promieniowania „własnego”.
Akt oddziaływania cząsteczki lub kwantu promieniowania jądrowego, będący warunkiem
detekcji promieniowania następuje w scyntylatorze. Zachodzi w nim przetwarzanie części
energii promieniowania na energię świetlną. Wiązka kwantów świetlnych prowadzona
ś
wiatłowodem dociera do fotokatody fotopowielacza i zostaje zaabsorbowana w materiale
fotokatody, wybijając z niej fotoelektrony. Fotoelektrony kierowane są na pierwszą dynodę
fotopowielacza i wyzwalają z niej elektrony emisji wtórnej. Kolejne dynody dołączone są do
coraz wyższego potencjału, toteż elektrony ulegają przyspieszeniu w polu elektrycznym.
Obecnie detektory scyntylacyjne są budowane w postaci sond składających się:
−−−−
kryształu scyntylacyjnego,
−−−−
fotokatody,
−−−−
fotopowielacza,
−−−−
przedwzmacniacza wraz z dyskryminatorem.
Najczęściej wykorzystywanymi kryształami do tych detektorów jest NaJ (Tl) (jodek sodu
aktywowanym talem), natomiast najstarszym znanym scyntylatorem jest ZnS (siarczek
cynku), który w początkowym okresie służył również do pokrywania ekranów lamp
kineskopowych. Ze względu na znaczne wzmocnienie sygnału, pewność działania (w tym
odporność na wysokie temperatury nawet do 120°C) wykorzystywane są często w badaniach
stosujących techniki jądrowe. Istotną wadą liczników scyntylacyjnych z kryształami
scyntylatorów nieorganicznych jest ich możliwość stosowania dla energii promieniowania
gamma dopiero od linii ameryku
241
Am (59,5 keV). Przy czym widmo takiego licznika składa
się zazwyczaj z:
−−−−
ogonu comptonowskiego (związany z rozpraszaniem comptonowskim absorbowanego
promieniowania),
−−−−
głównego piuk absorpcji,
−−−−
piku sumacyjnego (w przypadku emisji przez źródło kilku linii promieniowania gamma).
Przy wykorzystywaniu sond scyntylacyjnych należy zwrócić uwagę również na
temperaturę pracy, gdyż widmo licznika przesuwa się (pływa) oraz na starzenie się
kryształów związane głównie z uszkodzeniami radiacyjnymi.
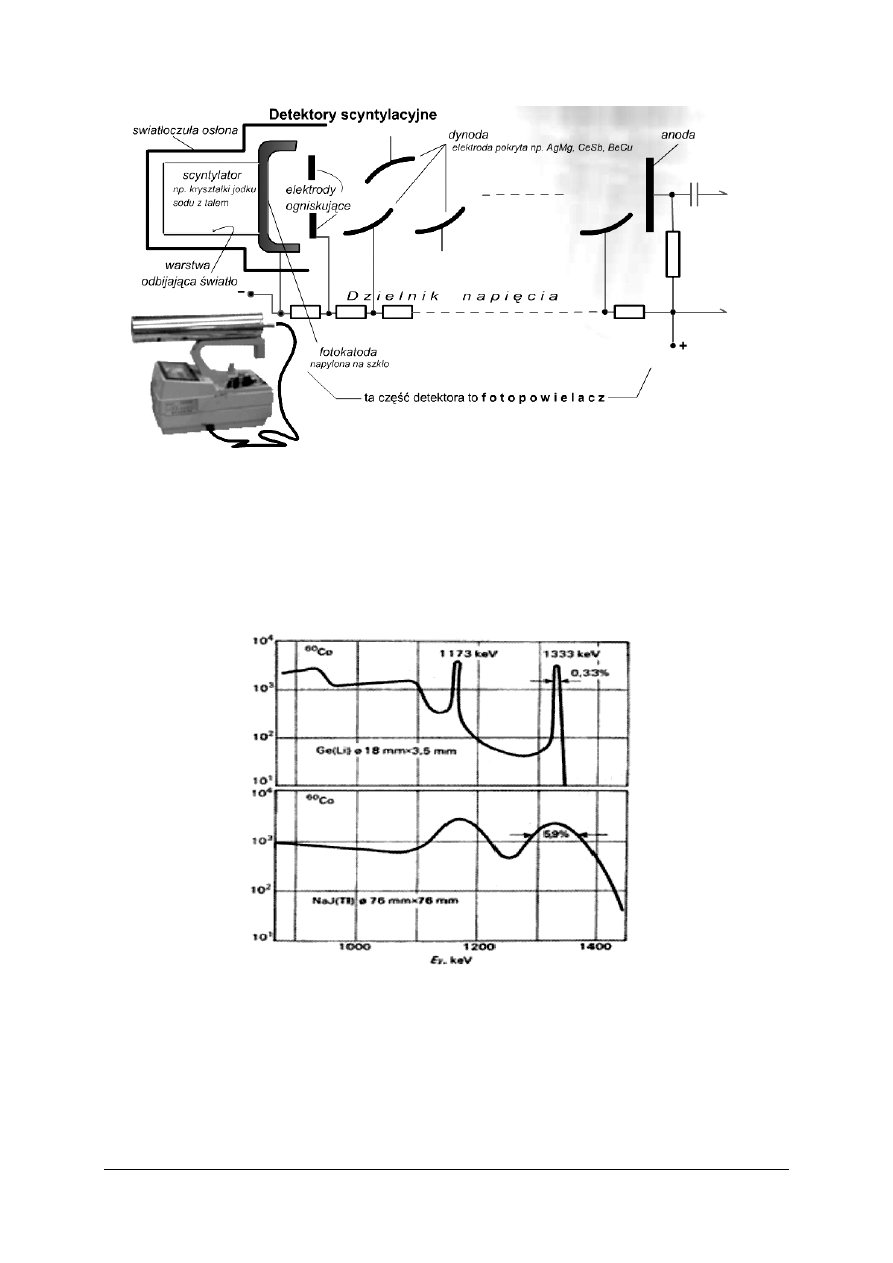
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
Rys. 55. Budowa sondy scyntylacyjnej [14]
Liczniki półprzewodnikowe
Są to detektory oparte na półprzewodnikach (np. germanie), w których promieniowanie
gamma powoduje wybijanie elektronów z zewnętrznych powłok atomów tworzących sieć
krystaliczną, co umożliwia przepływ prądu dziurowo-elektronowego pod wpływem
zewnętrznego pola elektrycznego. Daje to (podobnie jak w licznikach gazowych) impulsowy
spadek napięcia. Niestety liczniki te wymagają na ogół niskotemperaturowych warunków
pracy, a ich zaletą jest wysoka energetyczna zdolność rozdzielcza.
Rys. 56. Schemat przedstawia widmo impulsów licznika półprzewodnikowego [14]
Podany obok schemat przedstawia widmo impulsów licznika półprzewodnikowego Ge(li)
i spektrometru scyntylacyjnego NaJ(TI) eksponowanych na źródło promieniowania
60
Co.
Widać jak znacznie lepszą rozdzielczość uzyskał licznik półprzewodnikowy.
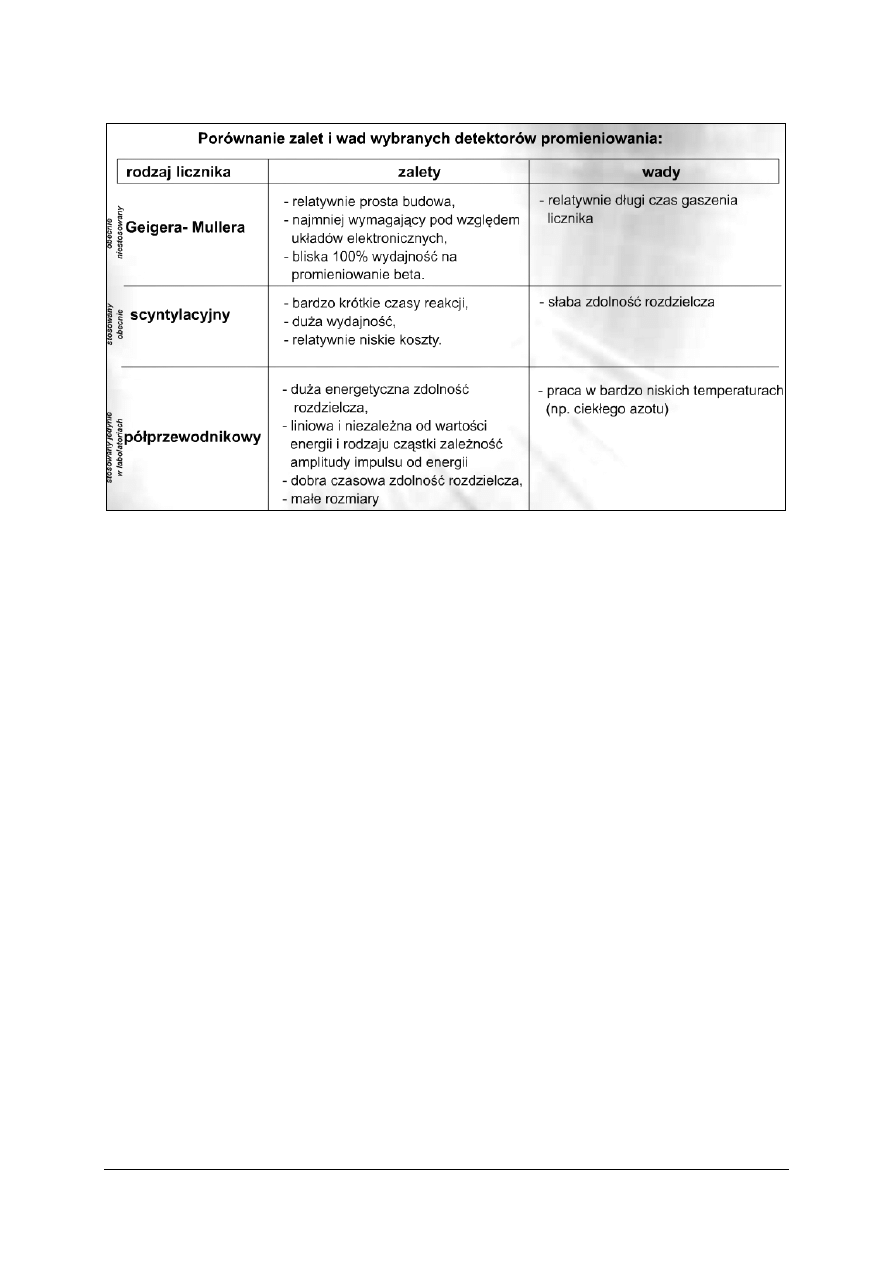
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
Tabela 6. Porównanie wybranych detektorów promieniowania [14]
We wszystkich metodach mierzących promieniowanie posługujemy się detektorami,
transformującymi częstość padających na nie kwantów lub cząstek promieniowania w ciąg
impulsów elektrycznych, rejestrowanych następnie w funkcji czasu lub długości, jako zmiany
ilości impulsów na jednostkę czasu.
Spektrometryczny pomiar w warunkach otworowych wymaga wykorzystania wydajnego
scyntylacyjnego detektora promieniowania, który pozwala na rozróżnianie energii
absorbowanego w nim promieniowania. Prezentowana sonda współpracuje z tym samym
kablem i urządzeniem wyciągowym co sonda akustyczna, wyposażona jest jednak wspólnie
z pozostałymi sondami do profilowań jądrowych w oddzielną aparaturę zasilającą i sterującą.
Dane pomiarowe przetwarzane są wstępnie przez interfejs, a następnie przekazywanie do
mikrokomputera.
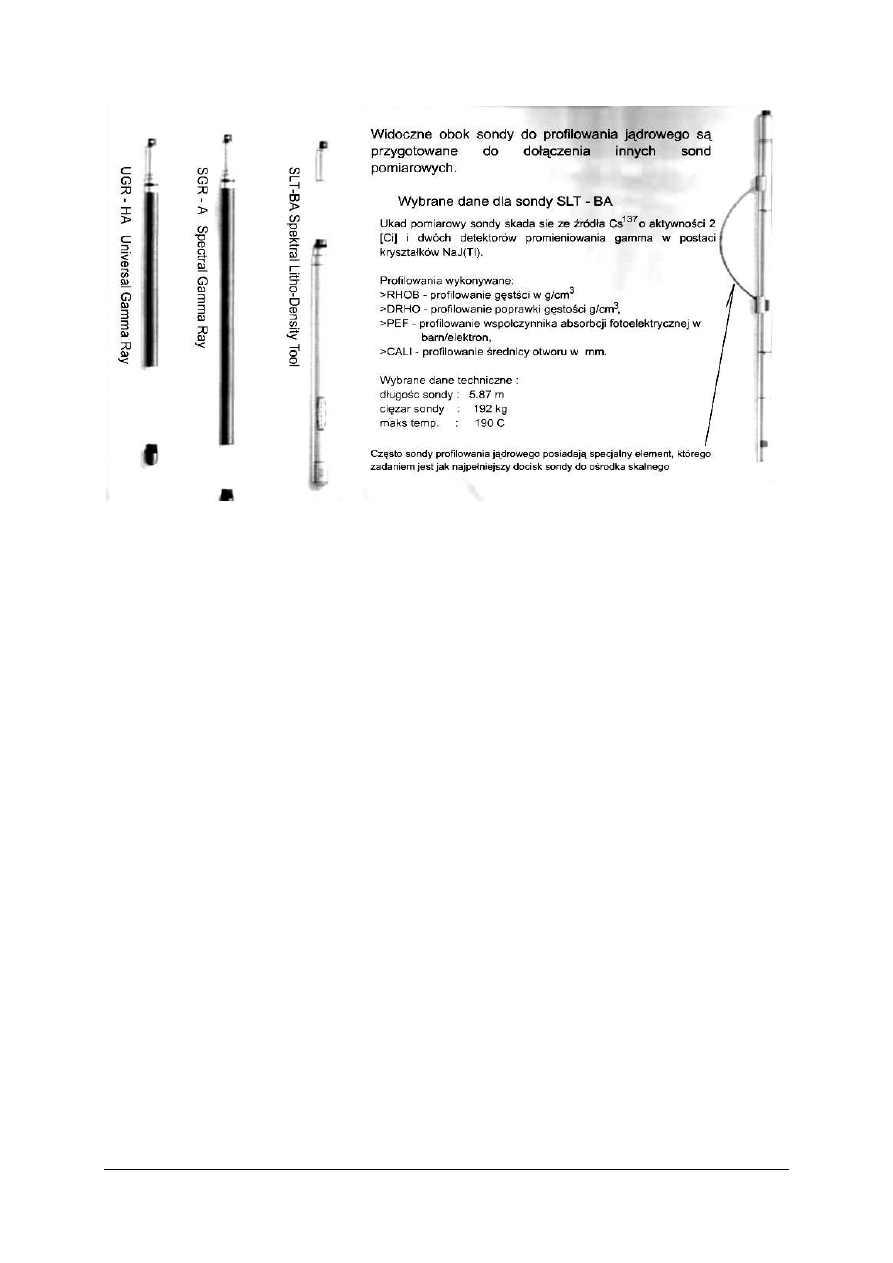
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
Rys. 57. Prezentacja sond do profilowania jądrowego [14]
Procedura prowadząca do określenia związku pomiędzy wskazaniami sondy pomiarowej,
a interesującymi parametrami ośrodka skalnego nazywa się cechowaniem lub kalibracją
sondy. Kalibracja musi uwzględniać nie tylko badany parametr skały, ale także inne czynniki
wpływające na częstość zliczeń, takie jak:
–
związane bezpośrednio z parametrami, do pomiaru których skonstruowana jest sonda
(np. porowatość ośrodka),
–
wypływające z wpływu innych od interesującego nas parametru skały (np. wpływ typu
litologicznego skały na wyznaczenie porowatości),
–
wynikające z wpływu otworu i warstw otaczających np. średnica otworu, własności
płuczki, obecność zarurowania itp.)
Gromadzenie, wizualizacja i kolejne przetwarzanie danych pomiarowych odbywa się
w mikrokomputerze przy użyciu dwóch programów: RAN i RDL. Program RAN spełnia rolę
100 kanałowego analizatora amplitud, dzięki czemu możemy mierzyć pełne widma
promieniowania. Tego typu pomiary mogą być jednak wykonywane tylko przy zatrzymanej
sondzie, co wymaga jej przesuwania z punktu na punkt, najczęściej ze stałym krokiem
głębokościowym – jest to tzw. statyczny wariant profilowania. Program RDL przeznaczony
jest do profilowania ciągłego z rejestracją 4-ch kanałów o ustawianych zakresach energii
odpowiadających potasowi, uranowi, torowi i promieniowaniu sumarycznemu (tzw.
total).
Profilowanie gamma wykorzystywane jest najczęściej do określania ilości substancji
ilastej w skale (tzw. zailenia). Promieniotwórczość bowiem skał osadowych jest
proporcjonalna do zawartości w nich substancji ilastej. Dysponując zatem całkowitą ilością
promieniowania (
total) możemy ilość substancji ilastej (V
ił
) obliczać wg następującego
wzoru:
V
ił
= (I – I
min
) / (I
max
– I
min
),
gdzie przez I oznaczono wskazania kanału sumarycznego w badanej warstwie, przez I
min
analogiczne wskazania w warstwie czystej (niezailonej), a przez I
max
wskazania w łupkach
(maksymalne zailenie). Do wyznaczania zailenia wykorzystywane są na ogół profilowania
niespektrometryczne, dlatego dla omawianej sondy można skorzystać z kanału sumarycznego
(nie rozdzielającego energii).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
Profilowanie gamma-gamma gęstościowe polega na wykorzystaniu zjawiska rozpraszania
i absorpcji promieniowania gamma w skale. Promieniowanie to emitowane jest przez źródło
wysokoenergetycznego promieniowania gamma (najczęściej Cs
137
o energii 0,661 MeV)
i kierowane jest przez odpowiedni układ kolimatorów (czyli specjalnie uformowanych
ekranów z ołowiu lub wolframu) do skały, tak aby uniemożliwić bezpośrednie
promieniowanie ze źródła do detektorów umieszczonych w sondzie powyżej źródła.
Jeżeli odległość detektora od źródła przekracza ok. 15 cm to ilość zarejestrowanego
promieniowania rozproszonego w skale maleje ze wzrostem gęstości. Sonda sPGG zestawu
SO-5-90 wyposażona jest w dwa detektory scyntylacyjne umieszczone w odległości ok.
15–40 cm od źródła Cs
137
. Sonda przystosowana jest do pracy w pozycji dociśniętej do ściany
otworu, dzięki czemu zminimalizowany jest wpływ płuczki wypełniającej otwór wiertniczy.
Obecność dwóch detektorów pozwala ocenić jakość docisku sondy do ściany odwiertu. Bliski
detektor odbiera promieniowanie ze strefy bliższej sondy, podczas gdy daleki ze strefy
dalszej, a zatem głębiej penetrującej ośrodek skalny. Obecność różnic w gęstości określonej
dla detektora bliskiego i dalekiego pozwala na wprowadzanie odpowiednich poprawek.
Profilowanie neutronowe wykorzystuje wyjątkowo wysoką zdolność atomów wodoru do
spowalniania neutronów. Ponieważ głównym źródłem wodoru w skałach jest woda, która
wypełnia przestrzeń porową, możemy wiązać wskazania sond neutronowych z porowatością skał.
Sonda neutronowa ODSN-102 składa się ze źródła neutronów szybkich (zakładanego
tylko na czas pomiarów otworowych), dwóch detektorów rejestrujących neutrony
nadtermiczne (detektor bliski) oraz neutrony termiczne (detektor daleki), elektroniki oraz
obudowy ciśnienio-odpornej. Szybkie neutrony wysyłane ze źródła mają energię kilku MeV,
która w trakcie poruszania się neutronu w ośrodku przekazywana jest napotykanym jądrom
pierwiastków, głównie jądrom wodoru. Najniższa energia osiągana przez neutrony zbliżona
jest do energii termicznych drgań ośrodka skalnego (0,025 eV dla temperatury 20
o
C).
Neutrony o takiej energii zwane są termicznymi.
Neutrony o nieco wyższej energii (>1 eV) nazywane są nadtermicznymi. Stosowane
detektory promieniowania neutronowego są bardziej czułe na neutrony termiczne – można je
zatem łatwiej rejestrować z wystarczającą dokładnością niż neutrony nadtermiczne.
Rejestracja jednak neutronów nadtermicznych jest czasem korzystna, gdyż nie są one
wrażliwe na tzw. silne absorbenty neutronów termicznych. Asorbenty takie (np. bor i gadolin)
występując nawet w śladowych ilościach, w znaczący sposób zniekształcają krzywe kalibracji
sond neutronowych, które wiążą ich wskazania z porowatością i niektórymi parametrami
ś
rodowiska pomiarowego (np. średnicą otworu wiertniczego, typem litologii).
Aparatura geoelektryczna do badań penetracyjnych AGP-01
Aparatura AGP-01 jest przeznaczona do badań parametrów elektrycznych ośrodka
w otworach penetracyjnych. Zapewnia pomiary polaryzacji samoistnej, rezystancji uziomów
i rezystancji pozornej, zarówno składowej rzeczywistej jak i urojonej, przy użyciu prądu
zmiennego o regulowanej częstotliwości, natężeniu i czasie trwania pomiarów.
Wybór sposobu pomiarów ich kolejności i czasu trwania jest dobierany przez operatora
umożliwiając pełne rozpoznanie zjawisk fizycznych i elektrochemicznych towarzyszących
badaniom. Badania mogą być prowadzone w funkcji głębokości otworu lub w funkcji czasu
na wybranych głębokościach.
Aparatura współpracuje z mikrokomputerem Notebook w zakresie wprowadzenia nastaw
pomiarowych do aparatury według wybranego programu wykonywania pomiarów,
prowadzenia akwizycji wyników i wstępnego opracowania danych pomiarowych.
W skład zestawu pomiarowego wchodzi aparatura pomiarowa i mikrokomputer.
Aparatura składa się z odbiornika, nadajnika, systemu mikroprocesorowego, zasilacza
nadajnika i komutatora elektrod.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
Odbiornik posiada dwa bloki analogowe: stałoprądowy o ograniczonym paśmie
przepustowym i zmiennoprądowy wąskopasmowy o regulowanej częstotliwości środkowej.
Wzmocnione i wyfiltrowane sygnały są przetwarzane na postać cyfrową i przekazywane do
systemu mikroprocesorowego.
Nadajnik służy do generacji prądu przemiennego o regulowanym i stabilizowanym
natężeniu oraz regulowanej częstotliwości. Kształt prądu wyjściowego jest prostokątny bez
składowej stałej. Nadajnik jest wykorzystywany tylko do pomiarów rezystancji.
System mikroprocesorowy zapewnia sterowanie wszystkich bloków wykonawczych
aparatury. Odbiera z Notebooka informacje o nastawach parametrów pomiarowych
i przekazuje je do odbiornika, nadajnika, komutatora elektrod i swoich układów
peryferyjnych. Zapewnia synchronizm pracy nadajnika i przetwornika analogowo-cyfrowego.
Wykonuje odczyty wyników i wysyła je do Notebooka.
Zasilacz nadajnika wytwarza napięcia zasilające elektronikę i obwody wyjściowe
nadajnika. Składa się z przetwornicy napięcia dużej mocy o wysokiej sprawności, która jest
włączana tylko na czas włączenia prądu wyjściowego nadajnika.
Komutator elektrod zapewnia podłączenie wybranych elektrod do układu pomiarowego
(2 dla pomiaru napięcia i rezystancji uziomu lub 4 dla pomiaru rezystancji pozornej). Każda
z elektrod może spełniać dowolną funkcję. Komutacja odbywa się bezprądowo – przy
wyłączonym prądzie wyjściowym nadajnika.
Sonda do wykonywania pomiarów elektromagnetycznych w otworze wiertniczym
Sonda SSW – narzędzie o wysokiej technologii. Zawartość rudy jest mierzona
i rejestrowana poprzez obniżenie sondy w otworze strzałowym. Profilowanie drążonych
diamentowymi wiertłami otworów w kopalni zaprezentowało, że zawartość rudy (niklu,
miedzi, kobaltu, PGM), jest proporcjonalna do natężenia reakcji elektromagnetycznej sondy
(EM), prawdopodobnie dlatego, że stosunek niklu do pirotynu jest stały w danym złożu rudy.
Sonda mierzy również przewodnictwo samoistne siarczków i procent magnetytu. Wszystkie
odczyty sondy są wyświetlane i automatycznie zapisywane w pamięci z 10 cm odstępem na
tym samym odczycie. Pomiar 30-metrowego otworu strzałowego zajmuje mniej niż 2 minuty.
Cały przyrząd jest lekki (12 kg) i prosty w obsłudze. Jedna osoba może przenieść system
SSW i zrobić pomiar zarówno dolnych jak i górnych otworów. Sonda pracuje
w temperaturach od -40°C do +50°C.
Sporządzanie wykresu pomiarów otworów strzałowych sondą SSW (2-3-4-6-10 cale
w średnicy) przed wystrzałem pozwala zdefiniować dokładny kształt złoża rudy w skale
płonnej oraz nieekonomiczną rudę o niskiej zawartości pierwiastka. Tak więc jedynie część
otworów, które zawierają rudę, jest wysadzana. W niektórych warunkach, kiedy sonda
pokazuje, że część bogatej rudy nie została wybrana, dodatkowe otwory strzałowe pozwolą
odzyskać gniazda bogatej rudy, które w przeciwnym razie pozostałyby nie ruszone
w ścianach przodka wybierkowego.
Kompletną sondę przedstawiono na rysunku 58. Składa się z modułu odczytującego,
zainstalowanego na wyciągarce zamocowanej na trójnogu. Wyciągarka może przyjąć kable
o długości od 20 do 80 metrów. Całe urządzenie zostało wymyślone w taki sposób, żeby
mogło być niesione i obsługiwane przez jedną osobę.
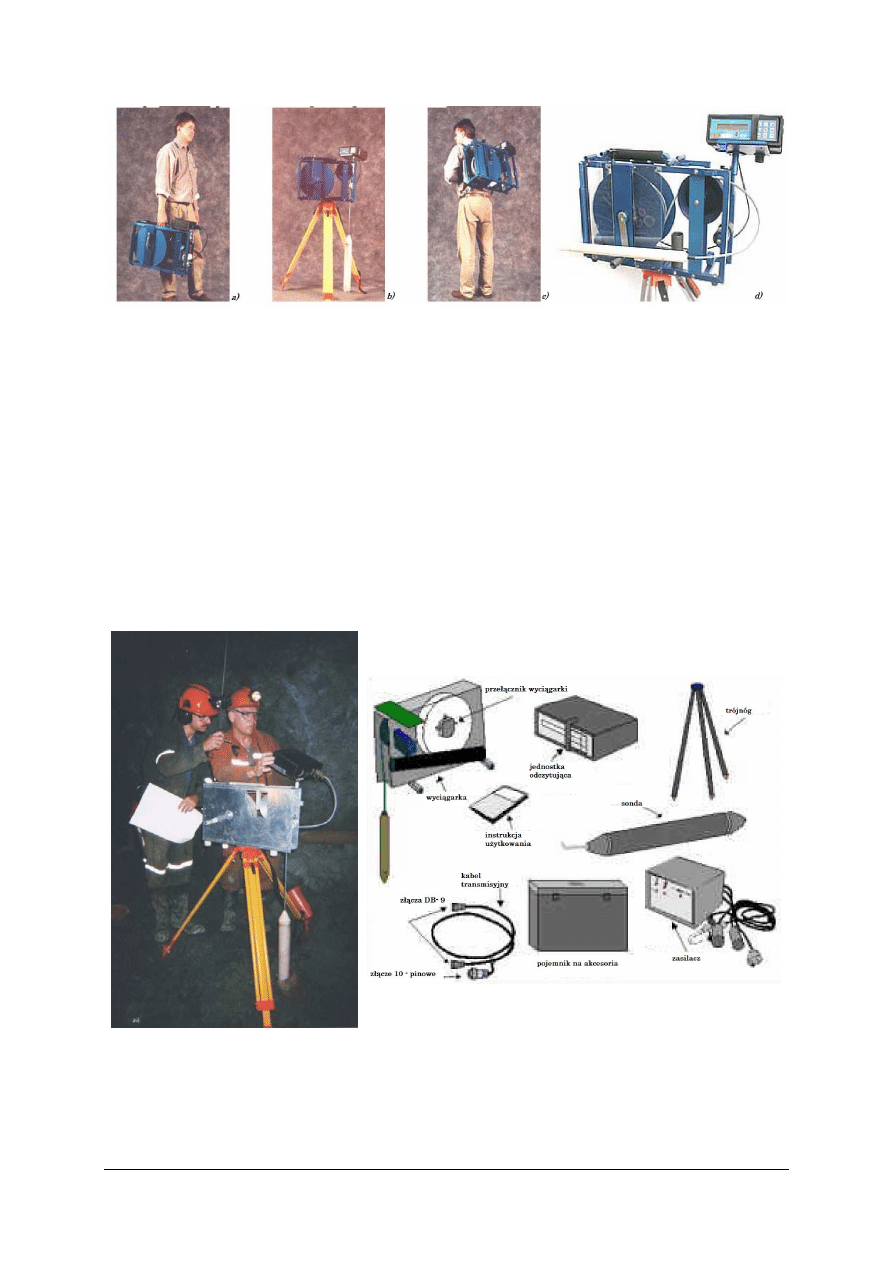
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
Rys. 58. Kompletna sonda SSW: a) przenoszenie ręczne, b) rozstawiona do pracy, c) przenoszona na plecach za
pomocą specjalnych szelek, d) zestaw przygotowany do pracy z bliska [14]
Odbiornik będzie pracował z sondami o średnicach odpowiednich dla otworów
strzałowych danej kopalni. Można przymocować ołowiany obciążnik w celu obniżenia sondy
do otworów wypełnionych wodą. Sonda ze wszystkim elementami waży mniej niż 12 kg
i może wytrzymać w ekstremalnych warunkach, od -40°C do +50°C, nawet w bardzo
wilgotnym środowisku. Moduł zasilany przez akumulator wyświetla odczyty i pozycję sondy
na ekranie przeciwoświetleniowym i kiedy sonda jest opuszczona, dane są automatycznie
zapisywane w pamięci wewnętrznej.
SSW potrafi wykryć i określić od 0,1% do 100% liości wiodących siarczków takich jak:
pirotynu, chalkopirytu, pendlandit i kilku, ale nie wszystkich pirytów lub galenitów, nawet
przy obecności magnetytu. Może również wykryć i określić ilościowo występowania obszar
magnetytu, ale precyzja dla magnetytu jest raczej niedokładna, jeśli są obecne silne
przewodniki.
Rys. 59. Wczesny
prototyp
sondy.
Pomiary
mogą
być
prowadzone na stojąco [14]
Rys. 60. Składniki sondy SSW [14]
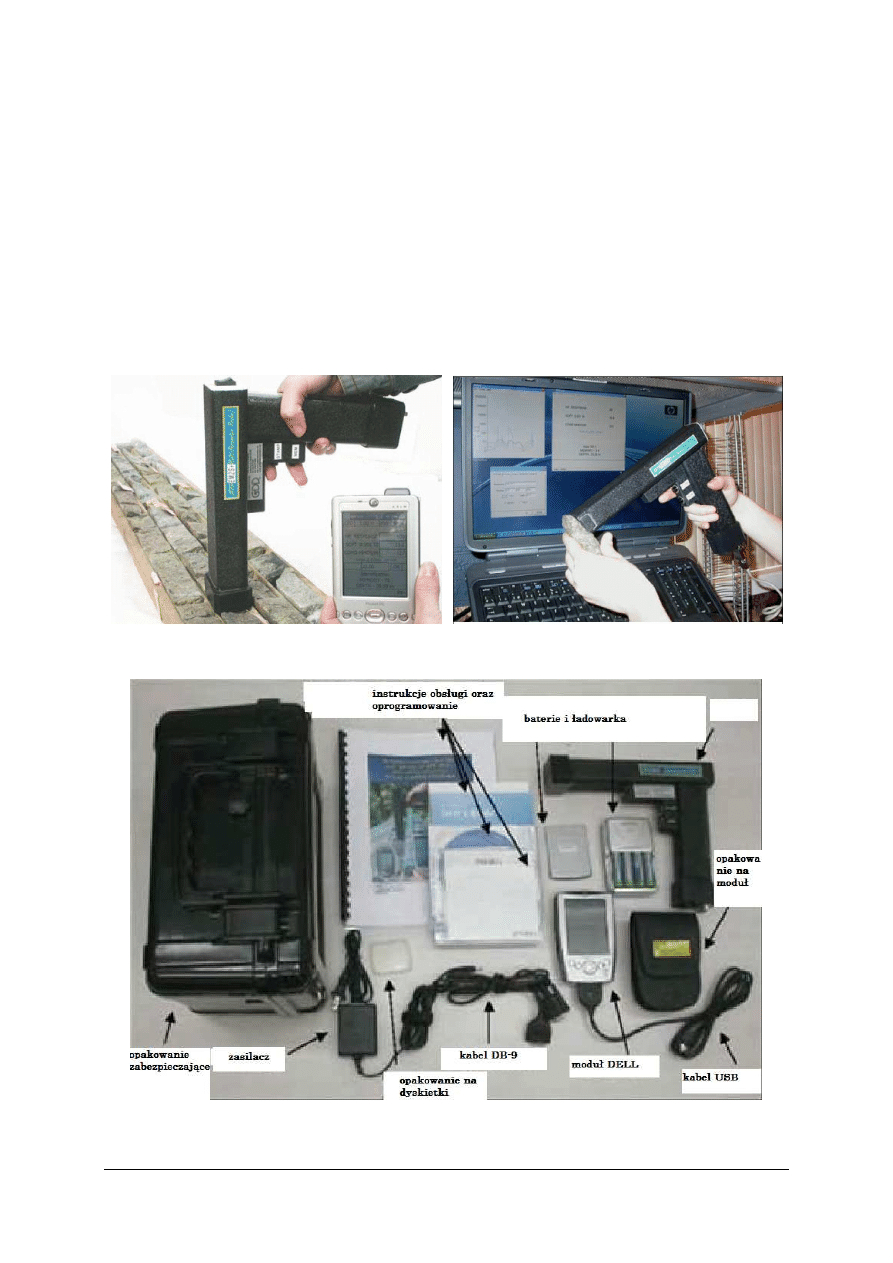
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
Wieloparametrowa Sonda MPP-EM2S+ z opcjonalnym Bluetooth
Sonda MPP-EM2S+ mierzy jednocześnie, do 10 razy na sekundę podatność magnetyczną
oraz przewodnictwo względne i bezwzględne. Łatwa w użyciu, jedna osoba może skanować
rdzenie wiertnicze, próbki terenowe, stan wody w otworach, skupiska rudy. Operator może
nagrać dane odczytu jednocześnie lub w trybie ciągłego skanowania (10 razy/sek.), żeby
stworzyć profil. Zarejestrowane dane z jednostki odczytowej Dell Axim lub PC są
przechowywane w pliku ASCII: identyfikacja otworów, głębokości zarejestrowanych wartości,
data, czas, etc. Następnie, format ASCII może zostać przekazany do oprogramowania
projektującego (Excel, Microsation, Autocad, etc). Na przykład, wrażliwość i przewodnictwo
mogą być naniesione na mapę wzdłuż DDH z analiz laboratoryjnych. Zaprojektowane
oprogramowanie pomaga końcowemu użytkownikowi szybko nakreślić profile i zinterpretować
właściwości geofizyczne przy zastosowaniu Excel Macro.
Rys. 61. Sonda, z której dane przesyłane są za
pomocą łącza Bluetooth [14]
Rys. 62. Sonda, z której dane przesyłane są
bezpośrednio do komputera [14]
Rys. 63. Zestaw do wykonywania pomiarów własności rdzeni i okolic otworów wiertniczych [14]
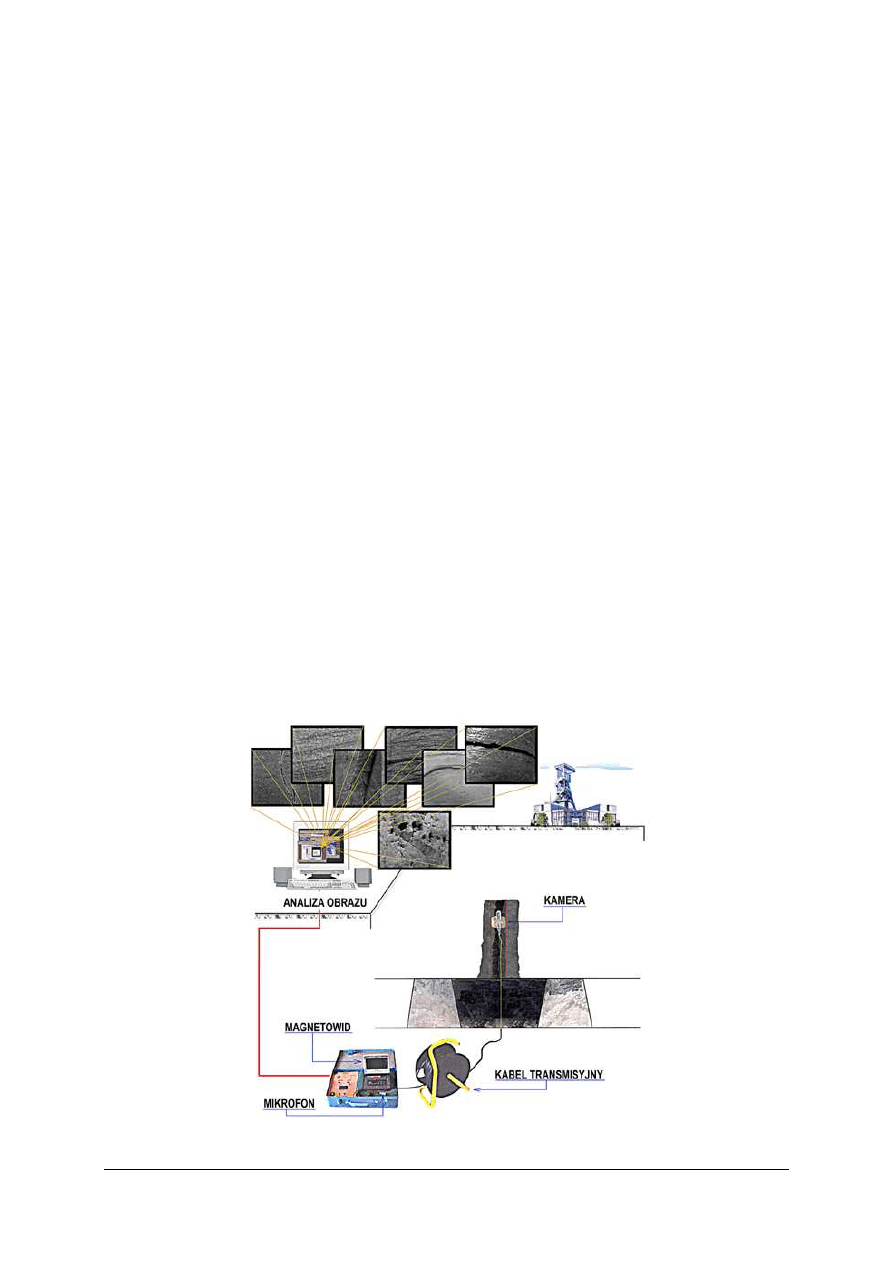
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
Kamera introskopowa do badania struktury skał w otoczeniu otworu wiertniczego
Doświadczenia, które uzyskano w polskim górnictwie w zakresie obudowy kotwiowej
dowodzą, że dysponujemy skutecznymi metodami pozwalającymi na kontrolę pracy obudowy
kotwiowej. Jednym z ciekawszych urządzeń mogących mieć zastosowanie między innymi do
tego typu badań jest kamera introskopowa.
W świetle dotychczasowych doświadczeń, ocena stateczności warstw stropowych może
być dokonana między innymi poprzez pomiar rozwarstwień. Ważnym dla oceny pracy
obudowy kotwiowej jest fakt czy rozwarstwienia powstają przy stropie wyrobiska, czy też
poza pułapem skotwionych skał.
Analizując zebrane dotychczas wyniki rozwarstwień skał stropowych, w warunkach
górotworu karbońskiego można wyróżnić dwie charakterystyczne strefy powstawania
rozwarstwień. Pierwsza obejmuje rozwarstwienia powstające w bezpośrednim sąsiedztwie stropu
wyrobiska tj. do wysokości 1,2 m i te nie stanowią większego zagrożenia dla stateczności.
Druga strefa rozwarstwień, ujawniająca się szczególnie w obszarze wpływu ciśnienia
eksploatacyjnego, obejmuje rozwarstwienia powstające bezpośrednio ponad pułapem
skotwionych skał. Rozwarstwienia w tej strefie są szczególnie niebezpieczne dla utraty
stateczności i wymagają szczególnej kontroli.
Stwierdzenie
wielkości
rozwarstwień
powstałych
przed
zainstalowaniem
rozwarstwieniomierzy jest także możliwe miedzy innymi przy pomocy introskopowej kamery
w podczerwieni opracowanej w AGH (rys. 64).
Wyższość kamery introskopowej pracującej w podczerwieni nad kamerą światła
widzialnego polega na tym, że przy jej pomocy można stwierdzać także szczeliny
zaszpachlowane zwiercinami.
Zastosowanie:
−
rozpoznanie rodzaju skały,
−
badanie stanu spękań skał od 0.1 mm,
−
pomiar szczelin (rozwarcia, położenia, wypełnienia, nachylenia),
−
lokalizacja rys, pęknięć i płaszczyzn pomniejszonej spoistości (pomiary mogą być
prowadzone również w wodzie do ciśnienia 3 MPa).
Rys. 64.
Przeprowadzenie badań za pomocą kamery introskopowej [20]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
Wypełnienie szczelin zwiercinami występuje szczególnie często, gdy w trakcie
wykonywania odwiertów używa się małej ilości wody i gdy rozwarcie szczelin jest
niewielkie. Głowicę kamery można wprowadzać do otworu wiertniczego na lekkich
bagnetowo łączonych rurkach, lub też w otworach pionowych opuszczać ją na kablu
sygnałowym.
Urządzenie samodostrajające układ elektroniczny umożliwia penetrację otworów
o długości do 200 m, nie traci się przy tym na ostrości i jakości obrazu. W skład urządzenia
wchodzi głowica penetrująca składająca się z:
−
obiektywu,
−
przetwornika obrazu,
−
oświetlacza,
−
wzmacniacza odczytu z synchronizacją,
−
konwertera sygnału,
Wymienione elementy umieszczone są w zamkniętej z obu stron metalowej rurze
o długości 150 mm, a jej średnica wynosi od 18 mm.
Sygnał z głowicy do centralnej części urządzenia, w którym znajduje się rejestrator
obrazu wyprowadzony jest specjalnym kablem (jego długość nie powinna przekraczać
200 mb). Głowicę wprowadza się do otworu wiertniczego na lekkich rurkach wykonanych
z włókna szklanego, z miarą metrową umożliwiającą pomiar głębokości pomiaru
introskopowego.
Układ sterowniczy umieszczony jest w metalowej skrzynce, włączany automatycznie po
otwarciu wieka skrzynki (elektroniczny włącznik iskrobezpieczny). Wyłączenie następuje po
zamknięciu wieka.
W skrzynce układu sterowania znajduje się jednostka rejestracji obrazu wraz
z jednoczesnym podglądem na kolorowym ekranie ciekłokrystalicznym. Rejestracja obrazu
i komentarzy odbywa się na kasetach Video Digital 8.
Całość jest zasilana akumulatorami znajdującymi się w głównej skrzynce (wraz
z wyświetlaczem ciekłokrystalicznym wskazującym stan naładowania akumulatora)
Układ sterujący posiada mikrofon umożliwiający nagrywanie komentarzy do
nagrywanego obrazu (szczególnie pomocne dla rejestracji badanej głębokości).
Do zestawu kamery dołączane są również zasilacze do ładowania akumulatorów oraz
specjalne pokrowce i torby brezentowe do przenoszenia urządzenia w trudnych warunkach.
Na taśmę nagrywa się równocześnie obraz i komentarz słowny, który pozwala między
innymi na bieżące uwagi o oglądanym obrazie, a także zaznaczenie głębokości, na jakiej
w danym momencie znajduje się głowica kamery. W ostatnim czasie opracowano dla potrzeb
kamery także automatyczny sposób pomiaru i zapisu głębokości na taśmie video i aktualnie
prowadzone są próby z tym systemem.
Elementy kamery interoskopowej przedstawiono na rysunku 65, a zasady działania są
następujące. Głowica penetrująca kamery introskopowej (1) składa się z: obiektywu,
przetwornika obrazu, oświetlacza, wzmacniacza odczytu z synchronizacją, konwertera
sygnału.
Wymienione elementy umieszczone są w zamkniętej z obu stron metalowej rurze
o długości 150 mm i średnicy od 18 mm.
Sygnał z głowicy do centralnej części urządzenia, w którym znajduje się rejestrator
obrazu wyprowadzony jest specjalnym kablem (długość do 200 mb) (3). Głowicę wprowadza
się do otworu wiertniczego na lekkich (bagnetowe łączonych) rurkach z włókna szklanego
(2), z miarą metrową umożliwiającą określenie głębokości pomiaru.
Układ sterowniczy (4) umieszczony jest w metalowej skrzynce, gdzie znajduje się
jednostka rejestracji obrazu wraz z jednoczesnym podglądem na kolorowym ekranie
ciekłokrystalicznym. Rejestracja obrazu i komentarzy odbywa się na kasetach Video Digital
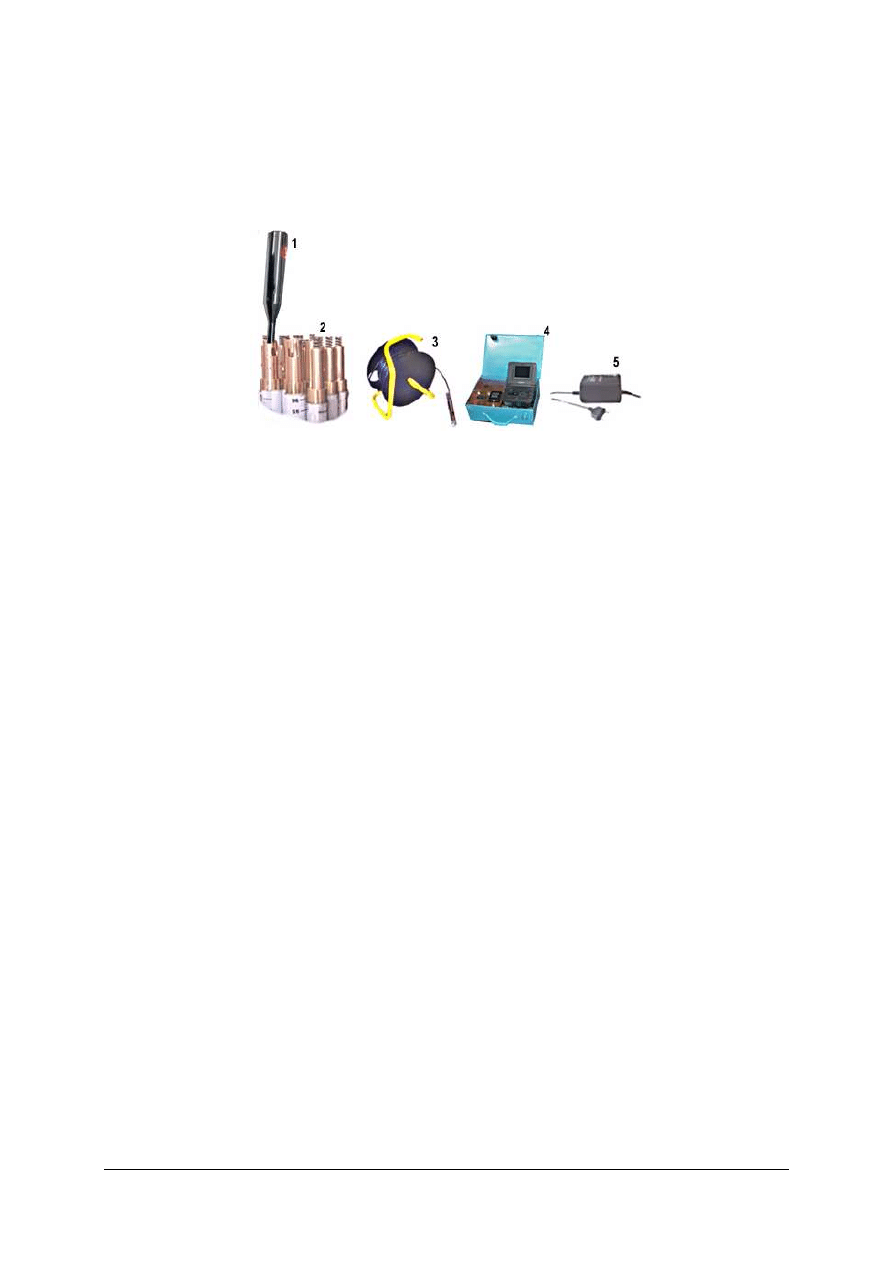
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
59
8. Całość jest zasilana akumulatorami (wraz z wyświetlaczem ciekłokrystalicznym
wskazującym stan naładowania akumulatora). Układ sterujący posiada mikrofon
umożliwiający nagrywanie komentarzy do nagrywanego obrazu (rejestracja głębokości).
Zasilacze (5) do ładowania akumulatorów oraz specjalne pokrowce i torby brezentowe do
przenoszenia urządzenia.
Rys. 65. Elementy zestawu kamery introskopowej – opisy w tekście [20]
Kamerę można wykorzystywać między innymi do pomiarów rozwarcia szczelin i kątów,
pod jakimi przecinają one otwór wiertniczy. Pomiary te mogą być realizowane na monitorze
obrazu, bezpośrednio podczas wykonywania badań na dole kopalni lub w trakcie przeglądania
taśmy już na powierzchni. Dokładność analizy obrazu jest tym większa im większa przekątna
monitora. Pole widzenia obiektywu współpracującego z prezentowaną kamerą dla średnicy
otworu wiertniczego równej 45 mm posiada wymiary 12 x 12 mm, takie też pole widzenia
wypełniać będzie ekran monitora. Używając monitora o przekątnej 17” można zapewnić
dokładność pomiaru rozwarcia szczelin przekraczającą 0,l mm.
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jakie urządzenia stosujemy do wykonywania pomiarów w otworach wiertniczych?
2.
Do czego służy sonda akustyczna?
3.
Za pomocą, jakiego urządzenia mierzy się średnicę otworu wiertniczego?
4.
Do czego wykorzystujemy mierniki promieniowania?
5.
Z jakich elementów zbudowany jest licznik Geigera-Mullera?
6.
Jak działa licznik scyntylacyjny?
7.
Jak zbudowane są sondy do profilowania otworów wiertniczych?
8.
Do czego stosujemy sondy SSW?
9.
Gdzie stosujemy kamery introskopowe?
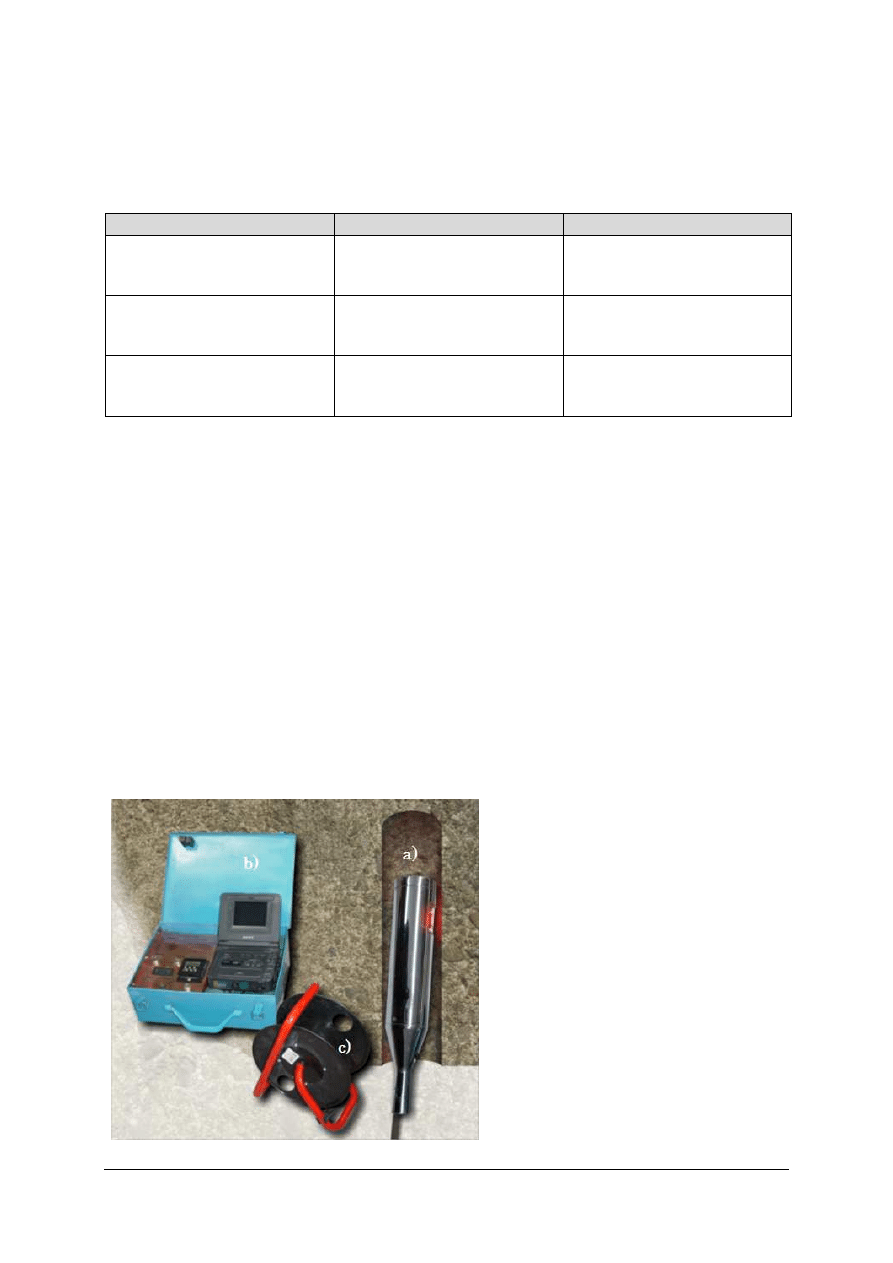
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
60
4.4.3. Ćwiczenia
Ć
wiczenie 1
Porównaj wady i zalety popularnych detektorów promieniowania.
Rodzaj licznika
Zalety
Wady
Geigera-Mullera
scyntylacyjny
półprzewodnikowy
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z dokumentacją liczników promieniowania,
2)
wyszukać informacje na temat stosowania liczników w gotowych zestawach
pomiarowych,
3)
określić zalety każdego typu licznika,
4)
określić wady każdego typu licznika,
5)
zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
dokumentacja techniczna liczników promieniowania,
−−−−
katalogi aparatury geofizycznej,
−−−−
literatura zgodna z punktem 6 poradnika dla ucznia.
Ć
wiczenie 2
Rozpoznaj elementy zestawu pomiarowego przedstawionego na rysunku.
Zestaw z kamerą introskopową:
a)
…………………………………………
…………………………………………
…………………………………………
…………………………………………
…………………………………………
…………………………………………
b)
…………………………………………
…………………………………………
…………………………………………
…………………………………………
…………………………………………
…………………………………………
c)
…………………………………………
…………………………………………
…………………………………………
…………………………………………
…………………………………………
…………………………………………

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
61
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
rozpoznać elementy przedstawione na zdjęciu,
2)
zapisać w wyznaczonych miejscach nazwy i przeznaczenie elementów,
3)
zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
katalogi aparatury geofizycznej,
−
literatura zgodna z punktem 6 poradnika dla ucznia.
Ć
wiczenie 3
Dobierz źródła promieniotwórcze do następujących sondowań: profilowanie neutronowe,
profilowanie gamma-gamma.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
określić cel dla którego ma być użyte źródło promieniowania,
2)
dobrać z tablicy źródeł promieniowania takie, które dobrze emituje neutrony,
3)
dobrać z tablicy źródeł promieniowania takie, które emituje promieniowanie gamma
o określonej energii,
4)
utworzyć w zeszycie listę źródeł promieniowania,
5)
zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
tablice pierwiastków promieniotwórczych,
−−−−
literatura zgodna z punktem 6 poradnika dla ucznia.
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
rozróżnić urządzenia stosowane do pomiarów geofizycznych
w otworach wiertniczych?
2)
objaśnić budowę sondy akustycznej?
3)
dobrać urządzenie do pomiarów średnicy otworów?
4)
rozpoznać liczniki promieniowania?
5)
określić wady i zalety różnych typów liczników promieniowania?
6)
rozpoznać
elementy
zestawu
pomiarowego
do
pomiarów
geofizycznych w otworach wiertniczych?
7)
dobrać urządzenia do pomiaru właściwości skał w okolicy otworu
wiertniczego?
8)
objaśnić zastosowanie kamery introskopowej?
9)
wymienić podstawowe materiały uszczelniające?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
62
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1.
Przeczytaj uważnie instrukcję.
2.
Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3.
Zapoznaj się z zestawem zadań testowych.
4.
Test zawiera 20 zadań o różnym stopniu trudności. Wszystkie zadania są zadaniami
wielokrotnego wyboru i tylko jedna odpowiedź jest prawidłowa.
5.
Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi – zaznacz prawidłową
odpowiedź znakiem X (w przypadku pomyłki należy błędną odpowiedź zaznaczyć
kółkiem, a następnie ponownie zakreślić odpowiedź prawidłową).
6.
Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7.
Kiedy udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego rozwiązanie
na później i wróć do niego, gdy zostanie Ci czas wolny. Trudności mogą przysporzyć Ci
zadania: 16–20, gdyż są one na poziomie trudniejszym niż pozostałe. Przeznacz na ich
rozwiązanie więcej czasu.
8.
Czas trwania testu – 30 minut.
9.
Maksymalna liczba punktów, jaką można osiągnąć za poprawne rozwiązanie testu wynosi
20 pkt.
Powodzenia
ZESTAW ZADAŃ TESTOWYCH
1.
Grawimetr, którego działanie oparte jest na obserwacji stanu równowagi masy
w systemie pomiarowym nazywamy
a)
balistycznym.
b)
statycznym.
c)
półprzewodnikowym.
d)
nie ma takiego grawimetru.
2.
W grawimetrach elementy sprężyste są
a)
tylko metalowe.
b)
tylko kwarcowe.
c)
metalowe lub kwarcowe.
d)
nadprzewodnikowe.
3.
Dryft grawimetru występuje w grawimetrach
a)
statycznych.
b)
dynamicznych.
c)
nadprzewodnikowych.
d)
w każdym grawimetrze.
4.
Kalibrowanie grawimetru polega na
a)
określeniu wpływu temperatury na zmianą odczytu
∆
S instrumentu.
b)
określeniu wpływu pola magnetycznego na zmianą odczytu
∆
S instrumentu.
c)
włączeniu elektronicznego filtra sejsmicznego podczas pracy grawimetru.
d)
ustaleniu związku między zmianą przyspieszenia siły ciężkości
∆
g a zmianą odczytu
∆
S instrumentu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
63
5.
Czujnik magnetometru rezonansu protonowego stanowi naczynie wypełnione cieczą
a)
o dużej zawartości atomów wodoru.
b)
o małej zawartości atomów wodoru.
c)
o małej zawartości atomów węgla.
d)
o dużej zawartości atomów węgla.
6.
W magnetometrze protonowym wykorzystano zjawisko
a)
rezonansu elektrycznego.
b)
rezonansu mechanicznego.
c)
rezonansu jądrowego.
d)
ż
adne z wymienionych.
7.
Elektrod niepolaryzujących używamy w metodzie
a)
profilowania elektrooporowego.
b)
pionowego sondowania elektrooporowego.
c)
potencjałów własnych.
d)
indukcyjnej.
8.
Komutator elektrod służy do
a)
wytwarzania napięcia zasilającego.
b)
sterowania blokami wykonawczymi aparatury.
c)
pomiarów rezystancji.
d)
podłączenie wybranych elektrod do układu pomiarowego.
9.
W georadarach wykorzystuje się impulsy
a)
sejsmiczne.
b)
elektryczne.
c)
elektromagnetyczne.
d)
magnetyczne.
10.
Im niższa częstotliwość pracy anten
a)
tym większa dokładność odczytu.
b)
tym większa głębokość penetracji.
c)
tym mniejsza głębokość profilowania.
d)
tym większe tłumienie fal.
11.
Anteny w georadarze spełniają funkcje
a)
tylko nadawcze.
b)
tylko odbiorcze.
c)
nadawczą i odbiorczą.
d)
są tylko dodatkiem poprawiającym jakość obrazu.
12.
Georadarowy system wielokanałowych polega na
a)
podłączeniu do pojedynczej jednostki rejestrującej kilku par anten.
b)
badaniach przeprowadzanych w kanałach i wyrobiskach podziemnych.
c)
podłączeniu pojedynczej pary anten do kilku jednostek rejestrujących.
d)
rejestrowaniu obrazów falowych z kilku georadarów.
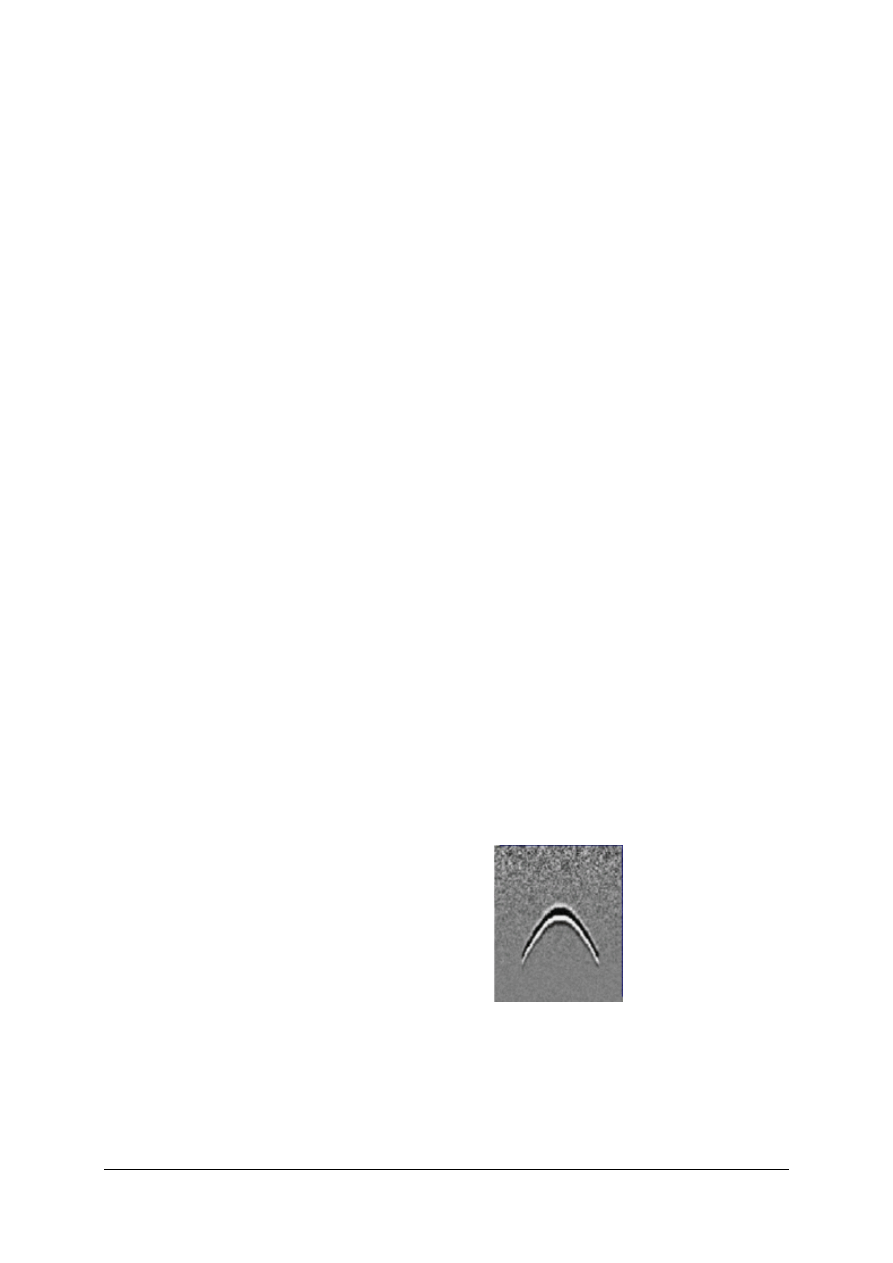
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
64
13.
Do nieeksplozyjnych źródeł sejsmicznych zaliczamy
a)
nitroglicerynę.
b)
dynamit.
c)
mieszankę azotanów z olejem napędowym.
d)
działo sejsmiczne Betsy.
14.
Częstotliwość rezonansowa geofonów mieści się w granicach
a)
0–3Hz.
b)
4–15Hz.
c)
1–36Hz.
d)
37–60Hz.
15.
Czułość geofonu rośnie wraz z ilością zwojów
a)
rośnie wraz z jego wielkością.
b)
maleje przy wzroście jego wymiarów.
c)
maleje wraz z ilością zwojów i natężeniem pola magnetycznego.
d)
rośnie wraz z ilością zwojów i natężeniem pola magnetycznego.
16.
Multipleksacja
a)
powoduje zapisywanie danych w postaci szeregowej.
b)
to wyświetlenie sygnałów na ekranie monitora.
c)
to przejście sygnału przez przetwornik c/a.
d)
to zwiększenie szybkości przewijania taśmy rejestratora.
17.
Czujniki drgań parasejsmicznych rejestrują wstrząsy wywołane przez
a)
trzęsienia ziemi.
b)
wybuchowe środki sejsmiczne.
c)
działa powietrzne.
d)
prace budowlane, ruch drogowy.
18.
Ź
ródłem neutronów jest izotop
a)
24
Na.
b)
60
Co.
c)
252
Cf.
d)
65
Zn.
19.
Prezentowane zdjęcie przedstawia obraz
a)
sejsmiczny.
b)
georadaeowy.
c)
profilowania otworu wiertniczego.
d)
zmian grawimetrycznych.
20.
Elektroniczny filtr sejsmiczny stosujemy
a)
tylko w aparaturze sejsmicznej.
b)
w niektórych magnetometrach.
c)
w sondach do pomiarów w otworach wiertniczych.
d)
w niektórych grawimetrach.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
65
KARTA ODPOWIEDZI
Imię i nazwisko ................................................................................................
Obsługiwanie aparatury do pomiarów geofizycznych
Zakreśl poprawną odpowiedź
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
66
6. LITERATURA
1.
Bała M., Cichy A.: Metody obliczania prędkości fal p i s na podstawie modeli
teoretycznych i danych geofizyki otworowej – Program Estymacja. Wydawnictwo AGH,
Kraków 2002
2.
Bolewski. A.: Rozpoznawanie minerałów na podstawie cech zewnętrznych i właściwości
fizycznych. Wydawnictwa Geologiczne, Warszawa 1981
3.
Dzwinel J.: Geofizyka: metody geoelektryczne. Cz. 4. – dla techników. – Wydawnictwa
Geologiczne, Warszawa 1978
4.
Fajklewicz Z. i in.: Zarys geofizyki stosowanej. Wydawnictwa Geologiczne, Warszawa
1972
5.
Gonet A., Macuda J.: Wiertnictwo hydrogeologiczne. Wydawnictwo AGH, Kraków 2004
6.
Jamrozik J., Mokojnik Z., Patyk M.: Geofizyka: metody sejsmiczne. Wydawnictwa
Geologiczne, Warszawa 1978
7.
Kiełt M.: Geofizyka wiertnicza w poszukiwaniu węglowodorów. Strukturalne
i sedymentologiczne zastosowanie otworowych profilowań geofizycznych – tom II.
Wydawnictwo Adam Marszałek, Toruń 2002
8.
Kowalski W. C.: Geologia inżynierska. Wydawnictwa Geologiczne, Warszawa 1988
9.
Kozera A., Makojnik Z., Święcicka-Pawliszyn J., Pawliszyn J., Plewa S., Tarkowski H.:
Geofizyka poszukiwawcza. Wydawnictwa Geologiczne, Warszawa 1987
10.
Stein J. Przewodnik do ćwiczeń z geofizyki geologicznej. Wydawnictwo UW, Warszawa
1983
11.
baza.pgi.gov.pl
12.
home.agh.edu.pl
13.
oen.dydaktyka.agh.edu.pl
14.
www.geofizyka.pl
15.
www.geoforum.pl
16.
www.geo-radar.pl
17.
www.georadary.pl
18.
www.igf.fuw.edu.pl
19.
www.ing.uni.wroc.pl
20.
www.teberia.pl
Wyszukiwarka
Podobne podstrony:
SKALOWANIE PRZYRZĄDU APARATURY DO POMIARU DŁUGOŚCI, SGGW Technika Rolnicza i Leśna, Automatyka, Spra
5 OBSLUGA PRZYRZADOW DO POMIARU CISNIENIA
Aparat do uboju bydła, BHP, Instrukcje-Obsługi
APARATURA KONTROLNO POMIAROWA DO PRODUKCJI NITROGLICERYNY
Obsługa aparatury pomiarowej z wykorzystaniem SCPI oraz środowiska VEE PRO, Nauka i Technika, Automa
Obsługiwanie urządzeń chłodniczych i aparatury kontrolno pomiarowej
APARATURA KONTROLNO POMIAROWA DO PRODUKCJI NITROGLICERYNY
APARATURA DO OCENY RÓWNOWAGI STATYCZNEJ
CZUJKI DYMU WYKORZYSTUJĄCE ŚWIATŁO ROZPROSZONE DO POMIARU GĘSTOŚCI OPTYCZNEJ DYMU
INSTRUKCJA OBSŁUGI APARAT KODAK EASYSHARE Z1285 PL
Procedury check in i check out oraz kompleksowa obsługa, powtórki do egzaminów
Podstawowym miejscem pracy operatora jest stanowisko obsługi wtryskarki do pracy przetwórstwa tworzy
Do pomiaru trzęsień ziemi stosujemy dwie różne skale
MAGNUM DINAMIK INSTRUKCJA OBSŁUGI PROSTOWNIKÓW DO ŁADOWANIA I ROZRUCHU 440 PL
Instrukcja obslugi Stojak do be Nieznany
Aparat do Jonoforezy
do pomiarów2
213 URZĄDZENIE DO POMIARU MOMENTU OBROTOWEGO UPM 100M
Zastosowanie fotokomórki do pomiarów fotometrycznych, Politechnika Krakowska
więcej podobnych podstron