
11. Czujniki i przetworniki przepływu
Pomiary przepływu prowadzi si
ę
w celu okre
ś
lenia ilo
ś
ci cieczy b
ą
d
ź
gazów
płyn
ą
cych ruroci
ą
giem. Zadanie to realizowane jest przez pomiar pr
ę
dko
ś
ci przepływu
v(m/s), strumienia obj
ę
to
ś
ciowego Q(m
3
/s) lub strumienia masy M(kg/s). Pomi
ę
dzy nimi
wyst
ę
puj
ą
zwi
ą
zki:
Q = A
•
v
M =
ρ
•
Q
gdzie: A – powierzchnia ruroci
ą
gu
v – pr
ę
dko
ść
przepływu
ρ
– g
ę
sto
ść
medium.
Do pomiaru przepływu najcz
ęś
ciej u
ż
ywa si
ę
nast
ę
puj
ą
cych przyrz
ą
dów:
•
przepływomierze oparte na pomiarze ci
ś
nienia ró
ż
nicowego (kryzy, rurki spi
ę
trzaj
ą
ce)
•
przepływomierze turbinkowe,
•
przepływomierze pływakowe (rotametry),
•
przepływomierze indukcyjne (elektromagnetyczne),
•
przepływomierze ultrad
ź
wi
ę
kowe,
•
przepływomierze wirowe (cz
ę
stotliwo
ś
ciowe, oscylacyjne),
•
przepływomierze Coriolisa.
W celu dobrania odpowiedniego przepływomierza nale
ż
y dokładnie sprecyzowa
ć
warunki pomiaru; nie ma idealnego przepływomierza dla dowolnych warunków.
Przy pomiarach przepływu cieczy nale
ż
y uwzgl
ę
dni
ć
nast
ę
puj
ą
ce wła
ś
ciwo
ś
ci cieczy:
1. G
ę
sto
ś
ć
: okre
ś
la stosunek masy do obj
ę
to
ś
ci (kg/m
3
); ta wielko
ść
jest istotna, kiedy w
wyniku pomiaru chcemy okre
ś
li
ć
wielko
ś
ci masowe przepływaj
ą
cej cieczy (dozowanie,
rozliczanie, mieszanie w odpowiednich proporcjach masowych). Poniewa
ż
g
ę
sto
ść
zmienia si
ę
pod wpływem temperatury, dlatego gdy nie mo
ż
na zapewni
ć
stałej
temperatury nale
ż
y stosowa
ć
układy kompensuj
ą
ce zmieniaj
ą
c
ą
si
ę
g
ę
sto
ść
.
2. Temperatura: mierzona w
o
C lub K; jest bardzo wa
ż
nym parametrem, bowiem powoduje
zmian
ę
g
ę
sto
ś
ci i lepko
ś
ci cieczy.
3. Ci
ś
nienie: mierzone w kPa lub MPa; ciecze zazwyczaj s
ą
nie
ś
ci
ś
liwe, dlatego wpływ tej
wielko
ś
ci na wynik pomiaru jest pomijalny. Jest istotny tylko ze wzgl
ę
dów
wytrzymało
ś
ciowych.
4. Lepko
ść
: charakteryzuje opór, tarcie wyst
ę
puj
ą
ce pomi
ę
dzy cz
ą
steczkami cieczy w
wyniku ich mi
ę
dzycz
ą
steczkowego oddziaływania b
ą
d
ź
opór wyst
ę
puj
ą
cy podczas ruchu
innych ciał wewn
ą
trz cieczy. W cieczach lepko
ść
zazwyczaj maleje ze wzrostem
temperatury. Lepko
ść
ma bardzo du
ż
y wpływ na wyniki pomiaru, dlatego nale
ż
y dla
okre
ś
lonej lepko
ś
ci, w jakiej ma pracowa
ć
przepływomierz przeprowadzi
ć
jego
kalibracj
ę
. W przypadku, kiedy mamy do czynienia ze zmienn
ą
temperatur
ą
, a tym
samym zmienn
ą
lepko
ś
ci
ą
wówczas przy zmiennych przepływach nale
ż
y stosowa
ć
odpowiednie układy kompensuj
ą
ce wpływ zmiennej lepko
ś
ci na wynik pomiaru (np.
czujnik temperatury). Przyj
ę
tym kryterium wpływu lepko
ś
ci (a tak
ż
e kryterium
podobie
ń
stwa przepływów płynów lepkich) jest bezwymiarowa liczba Reynoldsa.
5. Liczba Reynoldsa: okre
ś
la w sposób jednoznaczny charakter przepływu wi
ążą
c ze
sob
ą
wielko
ś
ci g
ę
sto
ś
ci, lepko
ś
ci, pr
ę
dko
ś
ci przepływu i
ś
rednic
ę
ruroci
ą
gu. Liczb
ę
Reynoldsa opisuje stosunek sił bezwładno
ś
ci do sił tarcia przepływaj
ą
cego medium
η
ρ
wD
F
F
tarcia
bezwad
=
=
.
Re
gdzie:
ρ
– g
ę
sto
ść
,
w–
ś
rednia pr
ę
dko
ść
przepływu.
η
- lepko
ść
dynamiczna
D –
ś
rednica ruroci
ą
gu
Dowolny stan przepływu czynnika jest zawsze jednoznacznie okre
ś
lony przez liczb
ę
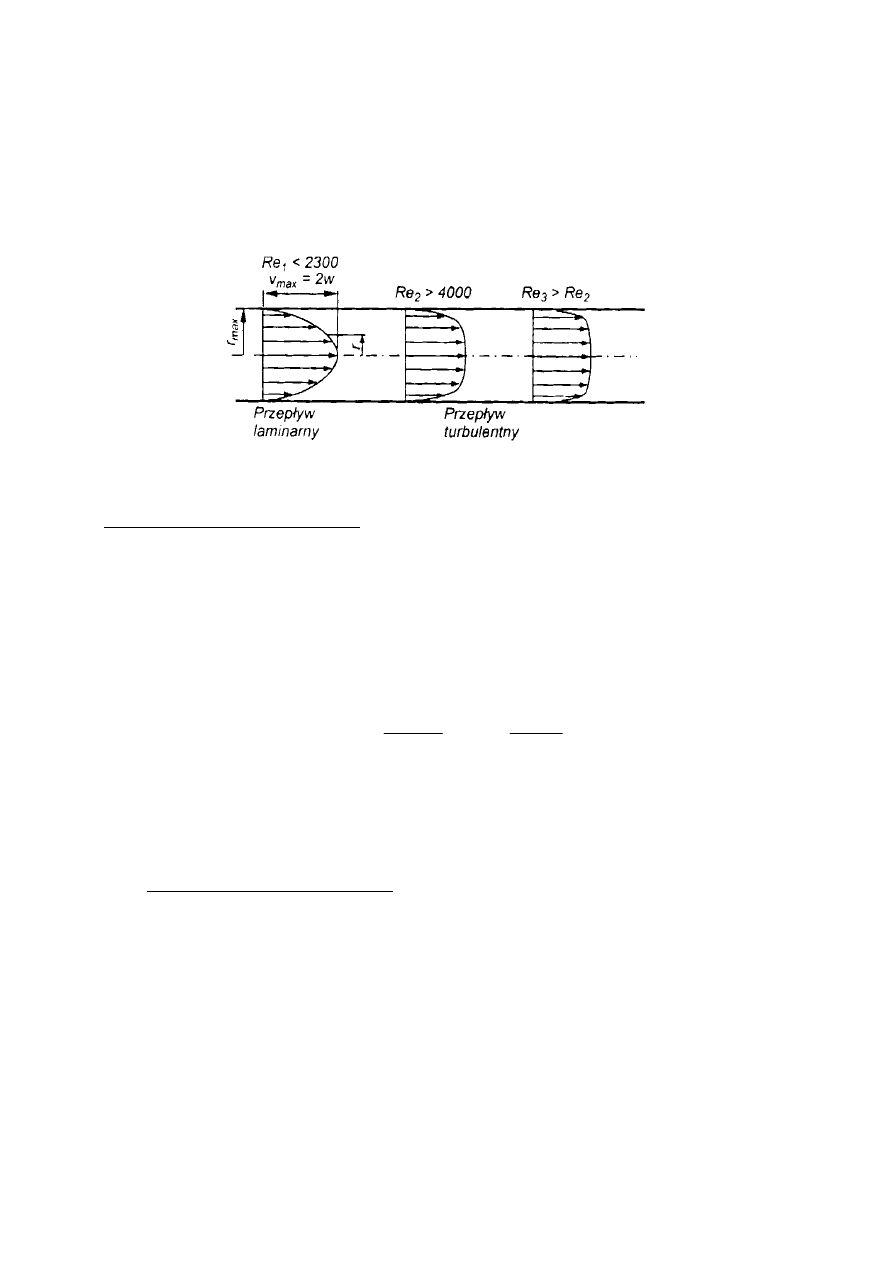
Reynoldsa. Dla R
e
<2300 (mała liczba) mamy do czynienia z przepływem laminarnym tj. nie
ma wymiany elementów płynu pomi
ę
dzy s
ą
siednimi warstwami, dla R
e
>4000 (du
ż
a liczba)
przepływ jest turbulentny tj. z intensywn
ą
wymian
ą
mi
ę
dzy warstwami płynu. Dla Liczby
Reynoldsa w zakresie 2300 < Re < 4000 (obszar krytyczny) przepływ mo
ż
e by
ć
laminarny
lub turbulentny, w zale
ż
no
ś
ci od szeregu czynników, jak chropowato
ść
rury, drgania,
pulsacje strumienia.
Ró
ż
ne s
ą
profile przepływu dla laminarnego i turbulentnego, co pokazuje rys. 34.
Rys.34. Profile pr
ę
dko
ś
ci przy ró
ż
nych warto
ś
ciach liczby Reynoldsa
Przy pomiarach przepływu gazów ze wzgl
ę
du na du
żą
rozpr
ęż
liwo
ść
nale
ż
y ustali
ć
punkt
odniesienia. Przykładowo: 100 m
3
/h powietrza przy ci
ś
nieniu atmosferycznym i temperaturze
70
0
C odpowiada ok. 100kg/h, a przy 20
0
C i 0,8MPa odpowiada ok. 1000 kg/h, czyli
dziesi
ę
ciokrotnie wi
ę
cej.
Ogólnie przyj
ę
tym punktem odniesienia jest gaz w warunkach normalnych tj. temp.=273
K(0
o
C), ci
ś
nienie atm. 1013,25 kPa (gaz rozpr
ęż
ony). W układach pomiarowych gazu
nale
ż
y stosowa
ć
oprócz pomiaru przepływu pomiar temperatury i ci
ś
nienia oraz układ
przeliczaj
ą
cy do warunków normalnych (Nm
3
/s, Nm
3
/godz). Rozliczenia ilo
ś
ci gazów mo
ż
na
dokonywa
ć
w Nm
3
lub w przeliczeniu na kg. Wpływ zmian temperatury i ci
ś
nienia na g
ę
sto
ść
gazu pokazuj
ą
przedstawiaj
ą
zale
ż
no
ś
ci:
x
x
x
x
x
x
n
n
x
n
x
K
RT
p
K
T
T
p
=
=
ρ
ρ
ρ
ρ
lub
Indeks x dotyczy rzeczywistych warunków pomiaru, indeks n normalnych warunków
pomiaru.
Wzgl
ę
dny współczynnik
ś
ci
ś
liwo
ś
ci K
X
- obliczany jako stosunek współczynnika
ś
ci
ś
liwo
ś
ci w
warunkach pomiarowych do współczynnika
ś
ci
ś
liwo
ś
ci w warunkach normalnych -
uwzgl
ę
dnia odchylenia wła
ś
ciwo
ś
ci gazu rzeczywistego od wła
ś
ciwo
ś
ci gazu doskonałego.
Przy pomiarach przepływu pary cz
ę
sto oprócz przepływu masy pary wymagane jest
precyzyjne wyliczanie ilo
ś
ci ciepła w przepływaj
ą
cej parze. Podstawowym parametrem
rozliczeniowym jest strumie
ń
energii obliczany jako strumie
ń
masy m i entalpii. Poniewa
ż
wraz ze zmian
ą
ci
ś
nienia i temperatury zmienia si
ę
g
ę
sto
ść
pary, do wyznaczenia strumienia
masy konieczne jest stosowanie specjalnych układów przeliczaj
ą
cych potrafi
ą
cych na
podstawie informacji o ci
ś
nieniu i temperaturze ustali
ć
wła
ś
ciwy strumie
ń
masy i energii.
11.1. Wybrane wielko
ś
ci charakteryzuj
ą
ce przepływomierze
Zakresowo
ść
Stosunek najwi
ę
kszego, mo
ż
liwego do zmierzenia przez układ pomiarowy przepływu,
do jego najmniejszego przepływu nazywamy zakresowo
ś
ci
ą
i oznaczamy symbolem TD.
Typowa zakresowo
ść
przepływomierzy wynosi 10-20: 1.
Przed okre
ś
leniem zakresowo
ś
ci musi zosta
ć
zdeterminowana dokładno
ść
systemu
pomiarowego. Zwi
ę
kszaj
ą
c zakresowo
ść
miernika zwi
ę
ksza si
ę
równie
ż
bł
ą
d pomiaru.
Jedna z metod zwi
ę
kszenia zakresowo
ś
ci przy zachowaniu dokładno
ś
ci pomiaru polega na
indywidualnym wykalibrowaniu miernika i wprowadzenie jego charakterystyki do systemu
pomiarowego.
Zakresowo
ść
przetwornika ró
ż
nicy ci
ś
nie
ń
Przetwornik ró
ż
nicy ci
ś
nie
ń
(DP) musi pokrywa
ć
zakres sygnałów z czujnika
przepływu. Zakresowo
ść
przetwornika ró
ż
nicy ci
ś
nie
ń
TD
DP
jest definiowana jako stosunek
pomi
ę
dzy maksymaln
ą
ró
ż
nic
ą
ci
ś
nie
ń
, odpowiadaj
ą
c
ą
przepływowi maksymalnemu, a jego
warto
ś
ci
ą
minimaln
ą
. Z powodu pierwiastkowej zale
ż
no
ś
ci pomi
ę
dzy ró
ż
nic
ą
ci
ś
nie
ń
(DP) a
przepływem zale
ż
no
ść
pomi
ę
dzy TD
DP
a TD jest nast
ę
puj
ą
ca:
TD
DP
= [TD]
2
lub TD =
√
TD
DP
Dla przepływomierza, którego zakresowo
ść
TD wynosi 10:1 (pomiar od 10% do 100%)
zakresowo
ść
przetwornika TD
DP
, musi wynosi
ć
100:1. Oznacza to,
ż
e przetwornik musi
mierzy
ć
z t
ą
sam
ą
dokładno
ś
ci
ą
sygnał ró
ż
nicy ci
ś
nie
ń
(DP) równy np. 50 kPa (przepływ
maksymalny oraz 0.5 kPa (przepływ minimalny). Wymóg ten jest praktycznie trudny do
spełnienia.
Bł
ą
d pomiaru (niepewno
ść
pomiaru)
S
ą
dwie metody przedstawiania dokładno
ś
ci pomiaru urz
ą
dzenia, które ró
ż
ni
ą
si
ę
od
siebie znacznie:
Bł
ą
d procentowy warto
ś
ci mierzonej jest bł
ę
dem wyra
ż
onym w procentach aktualnie
mierzonej warto
ś
ci. Dla dokładno
ś
ci 1% przy mierzonym w danej chwili przepływie równym
np. 10t/h bł
ą
d wynosi
±
0.1t/h natomiast przy mierzeniu przepływu, którego wielko
ść
wynosi
15t/h bł
ą
d jest równy 0.15t/h.
Bł
ą
d procentowy zakresu jest bł
ę
dem wyra
ż
onym w procentach zakresu pomiarowego,
jego warto
ść
w jednostkach fizycznych jest stała i nie zale
ż
y od aktualnie mierzonej
warto
ś
ci.
11.2. PRZEPŁYWOMIERZE OPARTE NA ZASADZIE POMIARU RÓ
Ż
NICY
CI
Ś
NIE
Ń
Do metod wykorzystuj
ą
cych do pomiaru przepływu ró
ż
nic
ę
ci
ś
nie
ń
zaliczamy metod
ę
zw
ęż
kow
ą
oraz metod
ę
u
ś
redniaj
ą
cych rurek pi
ę
trz
ą
cych. W metodzie zw
ęż
kowej
wykorzystywany jest spadek ci
ś
nienia – zwanego ci
ś
nieniem czynnym – wywołany na kryzie
pomiarowej przez przepływaj
ą
ce medium. W metodzie u
ś
redniaj
ą
cych rurek pi
ę
trz
ą
cych do
pomiaru przepływu wykorzystuje si
ę
ci
ś
nienie dynamiczne przepływaj
ą
cego medium,
b
ę
d
ą
ce ró
ż
nic
ą
ci
ś
nie
ń
całkowitego i statycznego. Obie te metody pomiarowe oparte s
ą
na
prawie ci
ą
gło
ś
ci przepływu oraz na prawie Bernoulli’ego.
Prawo ci
ą
gło
ś
ci przepływu i Bernoulli’ego
v
1
v
2
v
1
A
1
= v
2
A
2
A
1
A
2
Prawo Bernoulli’ego (dla stałej wysoko
ś
ci
∆
H=0, m=1kg)
nst
c
p
v
p
v
0
2
2
2
2
2
1
2
1
=
+
=
+
ρ
ρ
gdzie:
ρ
– g
ę
sto
ść
, p – ci
ś
nienie, v – pr
ę
dko
ść
strugi.
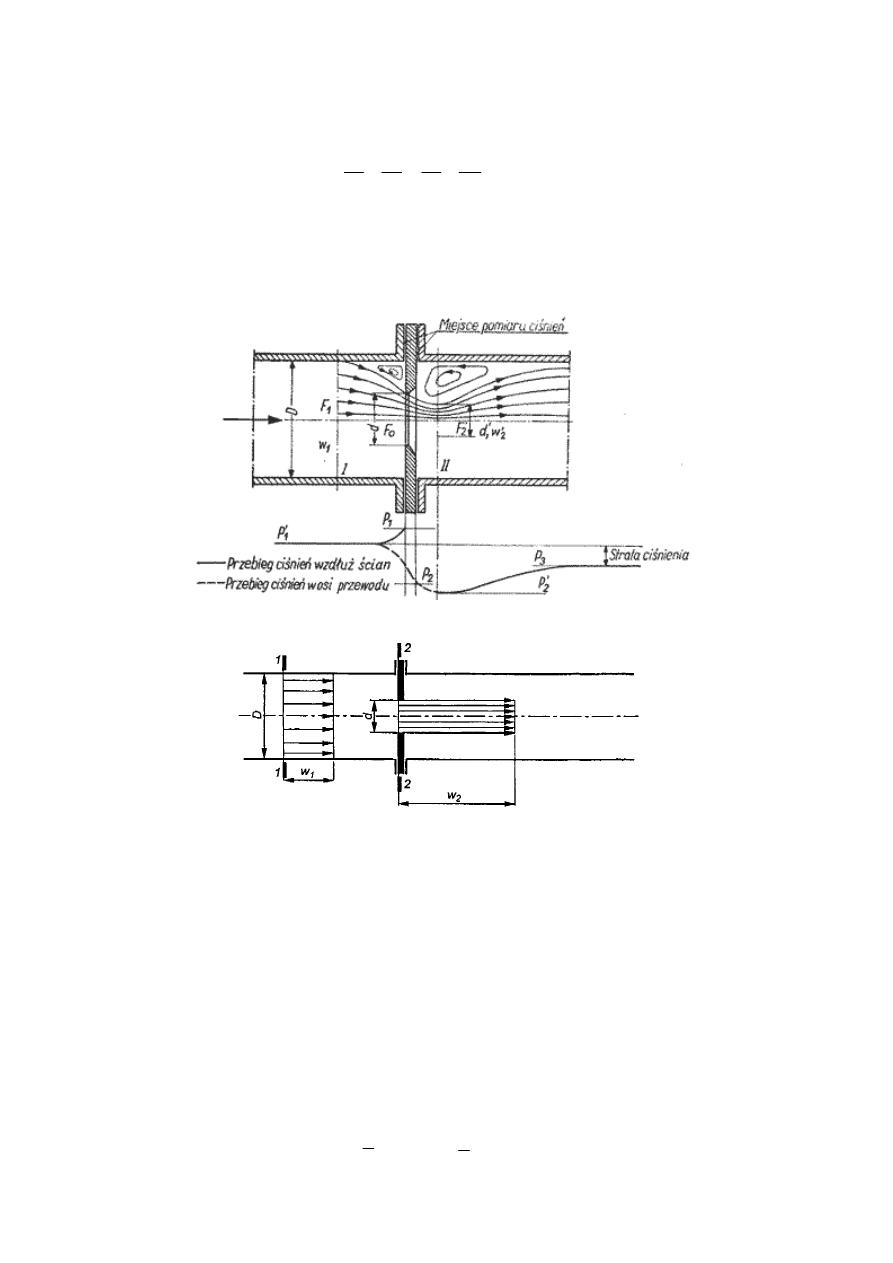
Najcz
ęś
ciej stosowan
ą
zw
ęż
k
ą
jest kryza. Stanowi ona płask
ą
tarcz
ę
z okr
ą
głym otworem o
ś
rednicy d, umieszczon
ą
współosiowo w ruroci
ą
gu o
ś
rednicy wewn
ę
trznej D – rys. 35.
a)
b)
Rys. 35. a) przebieg linii pr
ą
du i ci
ś
nienia przez kryz
ę
, b) uproszczony model przepływu
medium przez kryz
ę
Zgodnie z zasad
ą
ci
ą
gło
ś
ci strugi mo
ż
emy zapisa
ć
Q
m
= A
1
ρ
1
w
1
= A
2
ρ
2
w
2
gdzie:
ρ
i w –
ś
rednie warto
ś
ci g
ę
sto
ś
ci i pr
ę
dko
ś
ci płynu przed kryz
ą
(symbol 1) i w otworze
kryzy (symbol 2).
Dla płynów nie
ś
ci
ś
liwych
ρ
= const mo
ż
emy zapisa
ć
:
Q
V
= A
1
w
1
= A
2
w
2
Zgodnie z zasad
ą
zachowania energii, wzrost energii kinetycznej (zwi
ą
zanej z
pr
ę
dko
ś
ci
ą
strugi) mo
ż
e nast
ą
pi
ć
tylko kosztem spadku energii potencjalnej (ci
ś
nienia).
Zwi
ę
kszeniu pr
ę
dko
ś
ci w okolicach kryzy towarzyszy, wi
ę
c spadek ci
ś
nienia w tej strefie, co
wyra
ż
a równanie Bernoulliego:
2
1
ρ
w
1
2
+ p
1
=
2
1
ρ
w
2
2
+ p
2
= const
Po przekształceniach otrzymamy obj
ę
to
ś
ciowe nat
ęż
enie przepływu:
Q
V
=
ρ
π
β
p
d
∆
−
2
4
1
1
2
4
β
– współczynnik przew
ęż
enia
β
=
D
d
Przy wyprowadzaniu tego wzoru przyj
ę
to szereg uproszcze
ń
. Rozkład pr
ę
dko
ś
ci w
otworze kryzy i ruroci
ą
gu nie jest równomierny oraz to,
ż
e najwi
ę
ksze przew
ęż
enie
strumienia wyst
ę
puje poza ni
ą
, a przekrój strumienia w miejscu najwi
ę
kszego przew
ęż
enia
jest mniejszy ni
ż
w otworze kryzy. Wpływ wymienionych czynników i innych uwzgl
ę
dnia si
ę
wprowadzaj
ą
c tzw. współczynnik przepływu C. Wzór b
ę
dzie miał posta
ć
:
Q
V
=
ρ
π
β
p
d
C
∆
−
2
4
1
2
4
Współczynnik przepływu wyznacza si
ę
przez wzorcowanie szeregu podobnych
geometrycznie zw
ęż
ek o ró
ż
nych przew
ęż
eniach
β
.
Pomini
ę
to tak
ż
e wpływ tarcia, zmiany g
ę
sto
ś
ci (nie
ś
ci
ś
liwo
ść
), zmiany lepko
ś
ci itd. Dla
gazów takie uproszczenia mog
ą
by
ć
ź
ródłem znacznych niepewno
ś
ci pomiaru (bł
ę
dów
pomiarowych). W skutek spadku ci
ś
nienia w strefie zw
ęż
ki wyst
ą
pi rozpr
ęż
enie, a zatem
zmniejszenie g
ę
sto
ś
ci i dodatkowe zwi
ę
kszenie pr
ę
dko
ś
ci. W celu uwzgl
ę
dnienia tych
zjawisk stosowany jest mno
ż
nik poprawkowy
ε
, zwany liczb
ą
ekspansji. Jest on funkcj
ą
przew
ęż
enia, wykładnika izentropy oraz stosunku
∆
p/p. Ostatecznie przy obliczaniu
strumienia płynu korzystamy z równania:
ρ
π
β
ε
p
d
C
Q
V
∆
−
=
2
4
1
2
4
lub dla masowego nat
ęż
enia przepływu:
p
d
C
Q
m
∆
−
=
ρ
π
β
ε
2
4
1
2
4
Cech
ą
charakterystyczn
ą
przepływomierza zw
ęż
kowego jest strata ci
ś
nienia na zw
ęż
ce.
∆
p
STR
. Przyczyn
ą
tego s
ą
intensywne ruch wirowe w martwych strefach za kryz
ą
.
Przetworzenie mierzonej ró
ż
nicy ci
ś
nie
ń
na sygnał elektryczny b
ą
d
ź
pneumatyczny
odbywa si
ę
w przetwornikach pomiarowych.
Kryzy pomiarowe
Kryzy s
ą
przyrz
ą
dami słu
żą
cymi do pomiaru nat
ęż
enia przepływu za pomoc
ą
pomiaru
spadku ci
ś
nienia na elemencie spi
ę
trzaj
ą
cym.
Jest to metoda dokładna, wygodna, tania, ma
bardzo du
ż
e zastosowanie i nadaje si
ę
do dowolnych cieczy, gazów i par przy dowolnym
ci
ś
nieniu i temperaturze panuj
ą
cych w ruroci
ą
gach o przekroju poprzecznym kołowym.
Kryz
ę
mo
ż
na stosowa
ć
, je
ś
li spełnione s
ą
nast
ę
puj
ą
ce warunki:
•
przepływaj
ą
ce media powinny całkowicie wypełnia
ć
odcinek pomiarowy ruroci
ą
gu,
•
zw
ęż
ka powinna by
ć
wbudowana mi
ę
dzy dwoma prostoliniowymi odcinkami ruroci
ą
gu o
stałej powierzchni przekroju poprzecznego,
•
zw
ęż
ka powinna by
ć
wbudowana współosiowo i prostopadle do osi ruroci
ą
gu,
•
powierzchnia wewn
ę
trzna odcinka pomiarowego musi by
ć
czysta wolna od w
ż
erów,
osadów na długo
ś
ci co najmniej 10D przed i 4D za wbudowan
ą
kryz
ą
,
•
zw
ęż
ka pomiarowa powinna by
ć
wbudowana w ruroci
ą
gu w takim poło
ż
eniu w którym
warunki przepływu w obszarze bezpo
ś
rednio przed zw
ęż
k
ą
pomiarow
ą
w
wystarczaj
ą
cym stopniu b
ę
d
ą
zbli
ż
one do warunków wyst
ę
puj
ą
cych w obszarze o profilu
w pełni ukształtowanego przepływu tj. przy całkowitym braku zaburze
ń
.
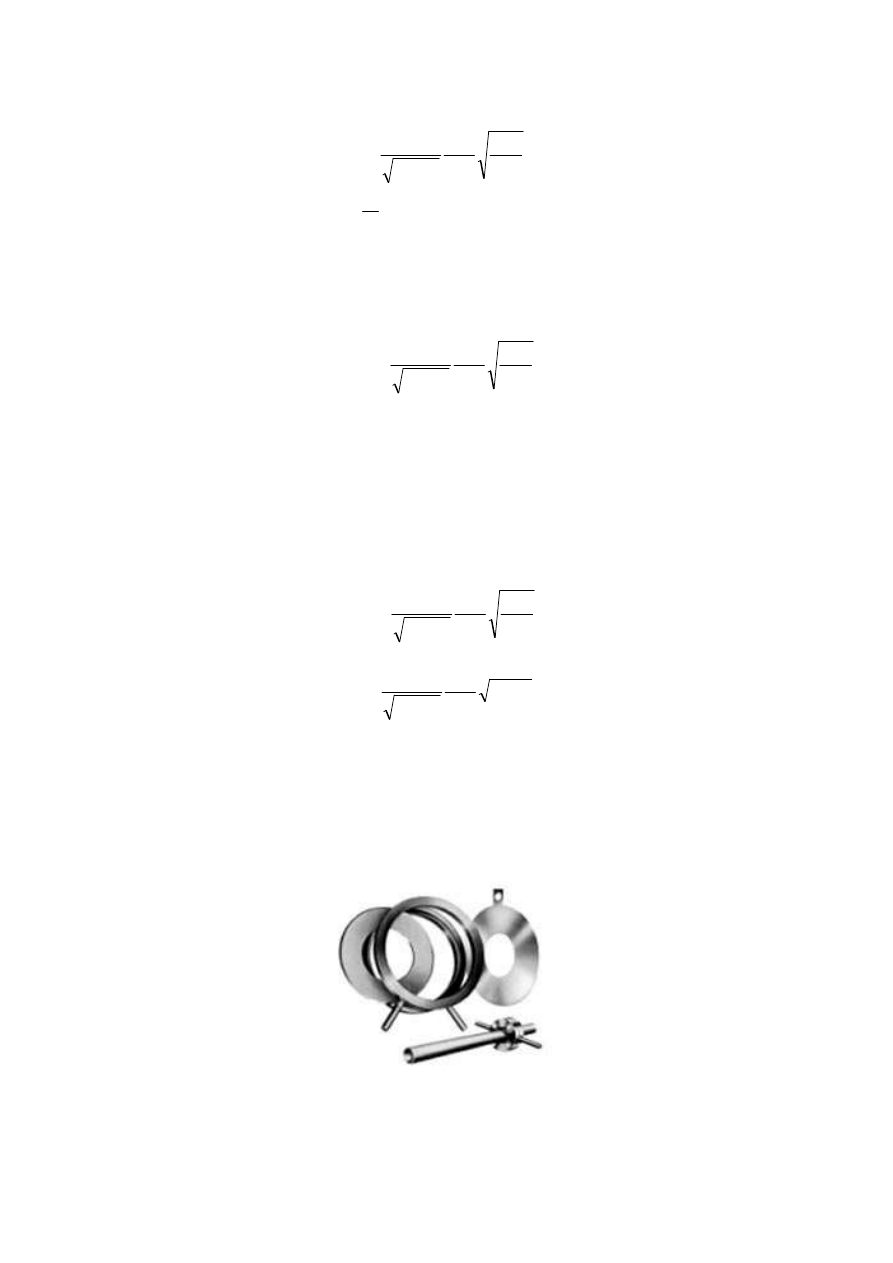
Kryzy wykonywane s
ą
zgodnie z normami pomiaru strumienia masy i obj
ę
to
ś
ci płynów,
gazów i ich par (krajowymi PN i zagranicznymi np. DIN). Wyró
ż
niamy kryzy znormalizowane,
symetryczne, segmentowe, kwadratowe, blokowe, klinowe.
Pomiary przepływu przy wykorzystaniu spadku ci
ś
nienia s
ą
najszerzej stosowanymi
technikami pomiarowymi. Urz
ą
dzenia wykorzystuj
ą
ce t
ę
technik
ę
s
ą
sprzedawane
dwukrotnie cz
ęś
ciej ni
ż
inne, wykorzystuj
ą
ce konkurencyjne techniki. Analitycy przewiduj
ą
,
ż
e ten trend b
ę
dzie kontynuowany w ci
ą
gu najbli
ż
szych lat.
Powstaj
ą
ce nowe technologie pomiarowe znajduj
ą
zastosowanie w konkretnych
instalacjach, natomiast przepływomierze zwi
ą
zane ze spadkiem ci
ś
nienia posiadaj
ą
niekwestionowan
ą
przewag
ę
w wi
ę
kszo
ś
ci zastosowa
ń
z wielu powodów:
1. wyj
ą
tkowa powtarzalno
ść
,
2. sprawdzona wiarygodno
ść
i stabilno
ść
przy prawidłowej instalacji i aplikacji,
3. monta
ż
bezpo
ś
rednio na instalacji procesowej,
4. łatwo
ść
kalibrowania i naprawy urz
ą
dze
ń
,
5. przemysłowy standard
ś
wiatowy (dost
ę
pne dane teoretyczne i do
ś
wiadczalne),
6. koszty instalowania w zasadniczej swej cz
ęś
ci niezale
ż
ne od rozmiaru instalacji,
7. jedno urz
ą
dzenie umo
ż
liwia pomiary dla wielu ró
ż
nych zastosowa
ń
.
Przez lata rozwój technologii wpływał na jako
ść
i rozwój przetworników przepływu
opartych o spadek ci
ś
nienia. Pierwsz
ą
zmian
ą
było przej
ś
cie z oprzyrz
ą
dowania
pneumatycznego na układy elektroniczne półprzewodnikowe, tam gdzie pozwalały warunki –
tankowce. Nast
ę
pnie rozwój poszedł w kierunku zmniejszenia wpływu zmian temperatury i
ci
ś
nienia. Dalsze zwi
ę
kszenie jako
ś
ci działania nast
ą
piło w momencie wprowadzenia
urz
ą
dze
ń
partych na technice mikroprocesorowej (typu smart) i rozwoju elementów
czujnikowych.
Eksperci przewiduj
ą
, i
ż
roczna sprzeda
ż
przepływomierzy opartych o spadek ci
ś
nienia
b
ę
dzie na poziomie 0,5 miliarda dolarów, przez co najmniej 5 lat.
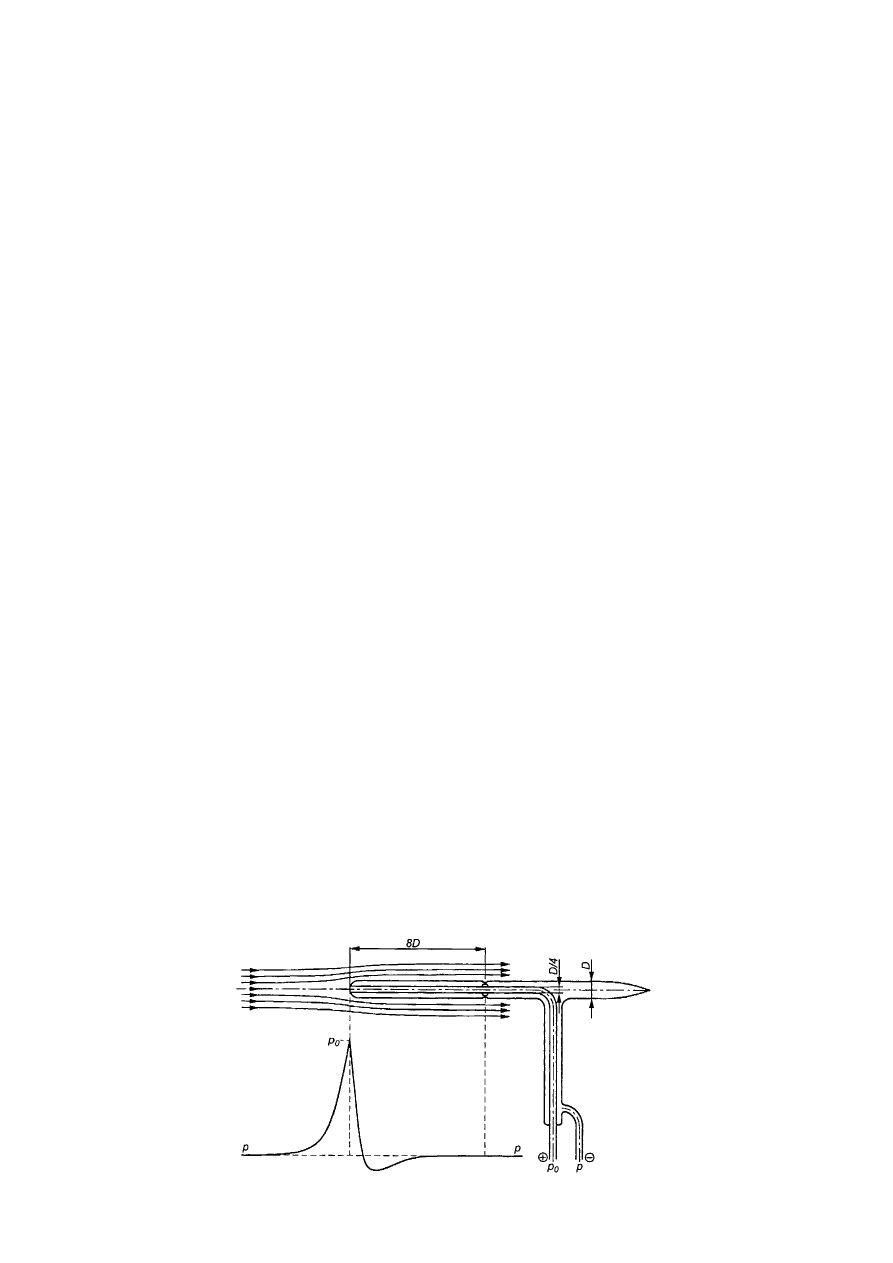
Rurki pi
ę
trz
ą
ce
Czujnikiem przepływomierzy pi
ę
trz
ą
cych jest odpowiednio ukształtowana rurka.
Zasad
ę
działania opisz
ę
w oparciu o rurk
ę
Prandtla; rys. 36.
Rys. 36. Schemat rurki Prandtla; linie pr
ą
du i rozkład ci
ś
nie
ń
przy jej opływie
Rurka w cz
ęś
ci czołowej posiada otwór, w którym nast
ę
puje spi
ę
trzenie i podwy
ż
szenie
ci
ś
nienia do warto
ś
ci p
o
. Ci
ś
nienie to maleje do warto
ś
ci p, takiej jak w cz
ęś
ci niezaburzonej,
w odległo
ś
ci 6÷8
ś
rednic. Rurka słu
ż
y do pomiaru pr
ę
dko
ś
ci v przepływu niezaburzonego.
Dla linii pr
ą
du w osi rurki mo
ż
na zapisa
ć
równanie Bernoulliego:
o
p
p
v
=
+
2
2
ρ
Po przekształceniu otrzymamy:
ρ
)
(
2
p
p
v
o
−
=
Ci
ś
nienie p
o
wyprowadzamy z rurki wewn
ę
trznej, a ci
ś
nienie p (przepływu niezaburzonego)
z otworów nawierconych na obwodzie rurki zewn
ę
trznej w odległo
ś
ci 8
ś
rednic gdzie
wyst
ę
puje ju
ż
ci
ś
nienie niezaburzonej.
Wzór ten jest słuszny dla cieczy i gazów przy niezbyt du
ż
ych pr
ę
dko
ś
ciach przepływu.
Przy wi
ę
kszych pr
ę
dko
ś
ciach przepływu gazu nale
ż
y uwzgl
ę
dni
ć
zmian
ę
g
ę
sto
ś
ci gazu przy
opływie rurki. Nale
ż
y, wi
ę
c zastosowa
ć
równanie uwzgl
ę
dniaj
ą
ce
ś
ci
ś
liwo
ść
.
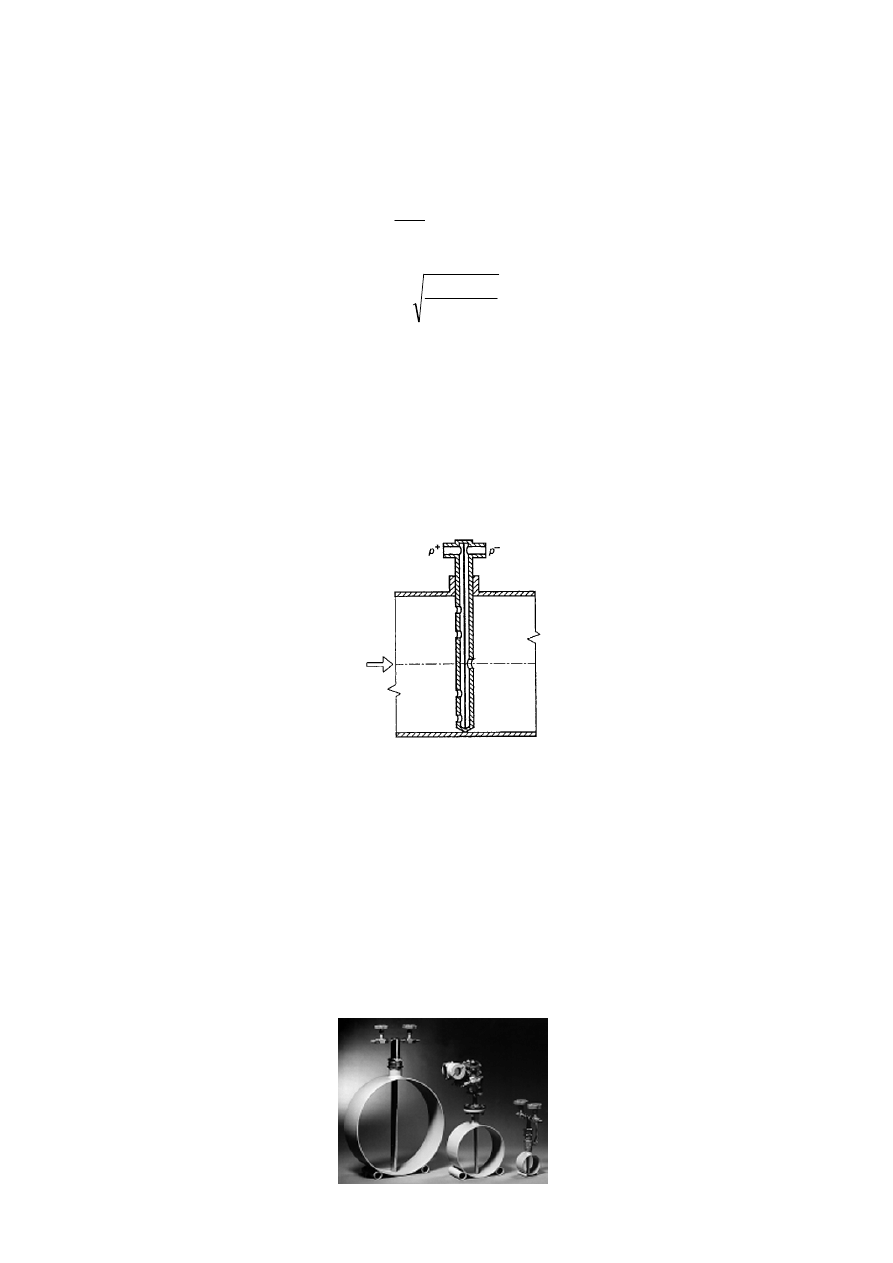
Ze wzgl
ę
du na zmienny rozkład pr
ę
dko
ś
ci strugi wewn
ą
trz ruroci
ą
gu, opracowano
konstrukcje rurek pi
ę
trz
ą
cych umieszczonych wzdłu
ż
ś
rednicy ruroci
ą
gu, prostopadle do
strumienia (rys. 37) celem u
ś
rednienia rozkładu pr
ę
dko
ś
ci.
Rys. 37. Budowa czterootworowej rurki pi
ę
trz
ą
cej
Najcz
ęś
ciej stosowane s
ą
sondy czterootworowe. Zapewniaj
ą
dobre u
ś
rednienie nawet
mocno zniekształconych profili pr
ę
dko
ś
ci. Sonda ma przekrój ostrokraw
ę
dziowy, aby
zapewni
ć
jednoznaczne oderwanie strumienia. Przy sondzie okr
ą
głej oderwanie strumienia
mo
ż
e w
ę
drowa
ć
zmieniaj
ą
c charakterystyk
ę
rurki w sposób przypadkowy. Najwa
ż
niejsze
zalety sond pi
ę
trz
ą
cych to:
•
bardzo mała strata ci
ś
nienia,
•
niski koszt zakupu i instalacji,
•
mo
ż
liwo
ść
instalacji w ruroci
ą
gach pod ci
ś
nieniem za pomoc
ą
specjalnego
oprzyrz
ą
dowania.
Czujnik przepływu INTROBAR
Wzrastaj
ą
ce wymagania odno
ś
nie dokładno
ś
ci pomiaru przepływu oraz minimalizacji
strat energetycznych na czujnikach pomiarowych, spowodowały gwałtowny wzrost
zainteresowania rurkami u
ś
redniaj
ą
cymi. Metoda ta wypiera kryzy pomiarowe dzi
ę
ki
znacznie lepszym parametrom metrologicznym, ni
ż
szym kosztom eksploatacji i monta
ż
u
oraz szerszym zakresom zastosowa
ń
. Specjalny kształt czujnika daje podwy
ż
szon
ą
stabilno
ść
i powtarzalno
ść
pomiaru, wy
ż
sze u
ż
yteczne sygnały ci
ś
nieniowe. Sonda ma
przekrój ostrokraw
ę
dziowy tak, aby zapewni
ć
, jednoznaczne oderwanie strumienia (przy
sondzie okr
ą
głej punkt oderwania strumienia mo
ż
e w
ę
drowa
ć
, co zmienia charakterystyk
ę
rurki w sposób przypadkowy)
Podstawowym elementem przepływomierza jest kształtka umieszczona w ruroci
ą
gu z
odpowiedni rozmieszczonymi otworami słu
żą
cymi do odbioru ci
ś
nienia. Przepływ w
ruroci
ą
gu powoduje nadci
ś
nienie w cz
ęś
ci czołowej i podci
ś
nienie na powierzchni tylnej i
bocznej czujnika. Odpowiednio umieszczone wzdłu
ż
czujnika otwory umo
ż
liwiaj
ą
odbiór
ró
ż
nicy ci
ś
nie
ń
takiej by była ona proporcjonalna do kwadratu pr
ę
dko
ś
ci
ś
redniej (strumienia
obj
ę
to
ś
ci) w ruroci
ą
gu, nawet w mocno zniekształconych profilach pr
ę
dko
ś
ci.
Zwi
ą
zek mi
ę
dzy
ś
redni
ą
pr
ę
dko
ś
ci
ą
w ruroci
ą
gu v, a zmierzon
ą
ró
ż
nic
ą
ci
ś
nie
ń
∆
p jest
nast
ę
puj
ą
cy:
ρ
p
K
v
∆
=
2
gdzie:
K – stały współczynnik przepływu
,
ρ
– g
ę
sto
ść
płynu.
Warto
ś
ci K dla przedstawionego kształtu mieszcz
ą
si
ę
w granicach 0,7 – 0,8 co
oznacza,
ż
e uzyskiwane spi
ę
trzenia s
ą
prawie dwukrotnie wi
ę
ksze od ci
ś
nienia
dynamicznego odpowiadaj
ą
cego pr
ę
dko
ś
ci
ś
redniej.
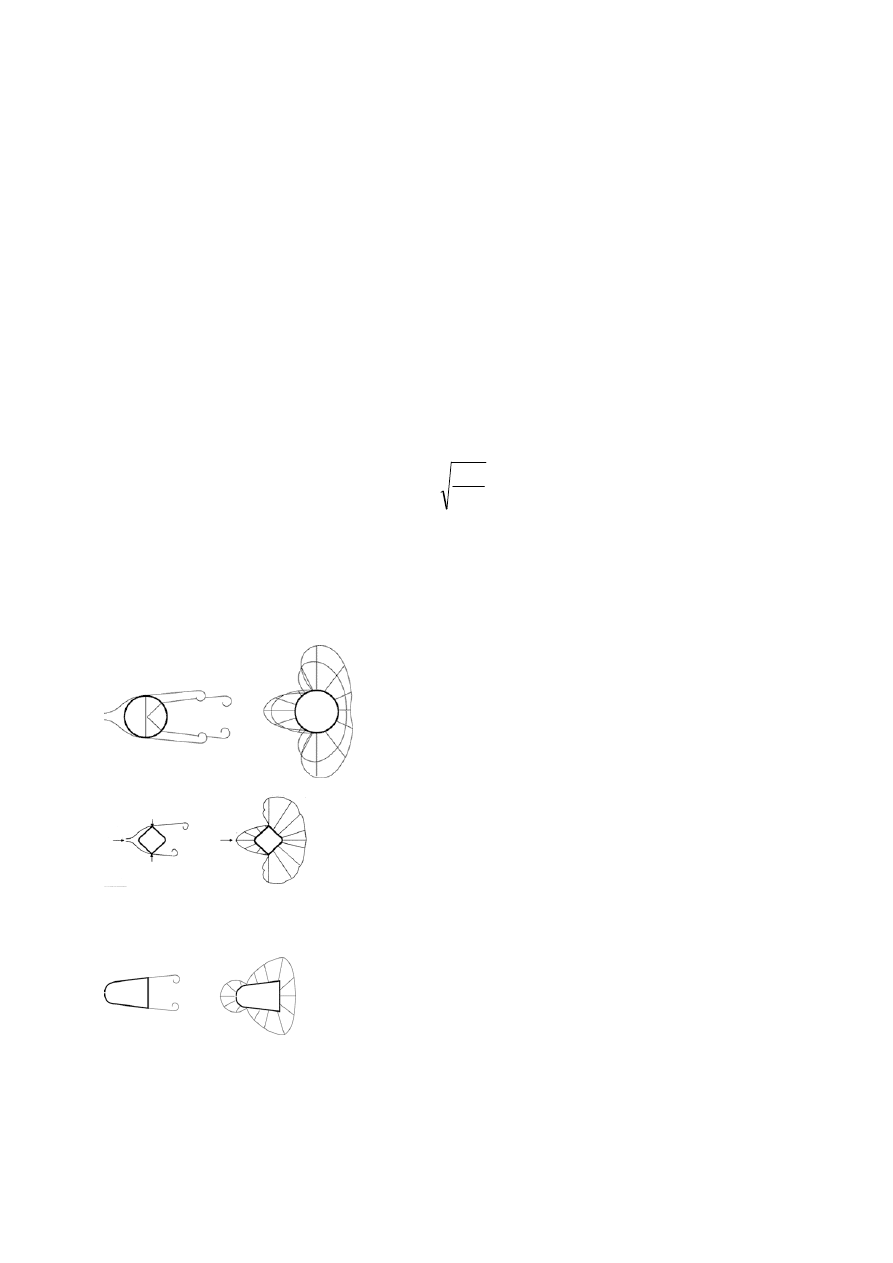
Czujnik o przekroju kołowym
Zmienne poło
ż
enie punktu oderwania warstwy
przy
ś
ciennej powoduje zmiany warto
ś
ci współczynnika
K dla du
ż
ych pr
ę
dko
ś
ci przepływu.
Czujnik INTROBAR
Czujnik ze wzgl
ę
du na generacj
ę
wirów o du
ż
ej energii
daje sygnał zmienny w czasie, pulsuj
ą
cy. Czujnik
nara
ż
ony jest na wibracje.
Stałe poło
ż
enie punktu oderwania warstwy przy
ś
ciennej
zapewnia stało
ść
współczynnika K dla du
ż
ych pr
ę
dko
ś
ci
przepływu.
Wymagane odcinki proste: 8-24D przed i 3-4D za czujnikiem.
Dokładno
ść
±
1% w całym zakresie pomiarowym, powtarzalno
ść
±
0.25%, koszt monta
ż
u
ponad 60% mniejszy w stosunku do monta
ż
u kryzy, tzw. wykonanie WET-TAP umo
ż
liwi
wyj
ę
cie i zało
ż
enie czujnika w czasie pracy.
Przepływomierze z rurk
ą
spi
ę
trzaj
ą
c
ą
ACCUTUBE
Accutube jest okr
ą
gł
ą
u
ś
redniaj
ą
c
ą
rurk
ą
Pitota wyposa
ż
on
ą
w otworki umieszczone
od strony napływu i odpływu płynu. Zamontowana w strumieniu przepływaj
ą
cego medium
mierzy ró
ż
nic
ę
ci
ś
nienia pomi
ę
dzy nadci
ś
nieniem wywołanym dynamicznym naporem
medium od strony napływowej (dodatniej), a podci
ś
nieniem powstaj
ą
cym od strony
odpływowej (ujemnej). Mierzone ci
ś
nienie ró
ż
nicowe jest proporcjonalne do nat
ęż
enia
przepływu.
gh
Q
2
=
gdzie: Q – nat
ęż
enie przepływu, h – ci
ś
nienie ró
ż
nicowe w mm H
2
O
Czujnik współpracuje z przetwornikiem ró
ż
nicy ci
ś
nie
ń
. Dokładno
ść
pomiaru 1% w
szerszym zakresie ni
ż
zw
ęż
ki pomiarowe. Długo
ś
ci wymaganych odcinków prostych to 10-
12
ś
rednic ruroci
ą
gu od strony napływu i 4-5 od strony odpływu.
11.3. Przepływomierze wirowe VORTEX
W
przepływomierzach wirowych (oscylacyjnych) wykorzystano oscylacje (drgania)
strumienia przepływaj
ą
cego medium lub umieszczonego w nim oscylatora mechanicznego,
których cz
ę
stotliwo
ść
jest proporcjonalna do warto
ś
ci przepływaj
ą
cego strumienia obj
ę
to
ś
ci.
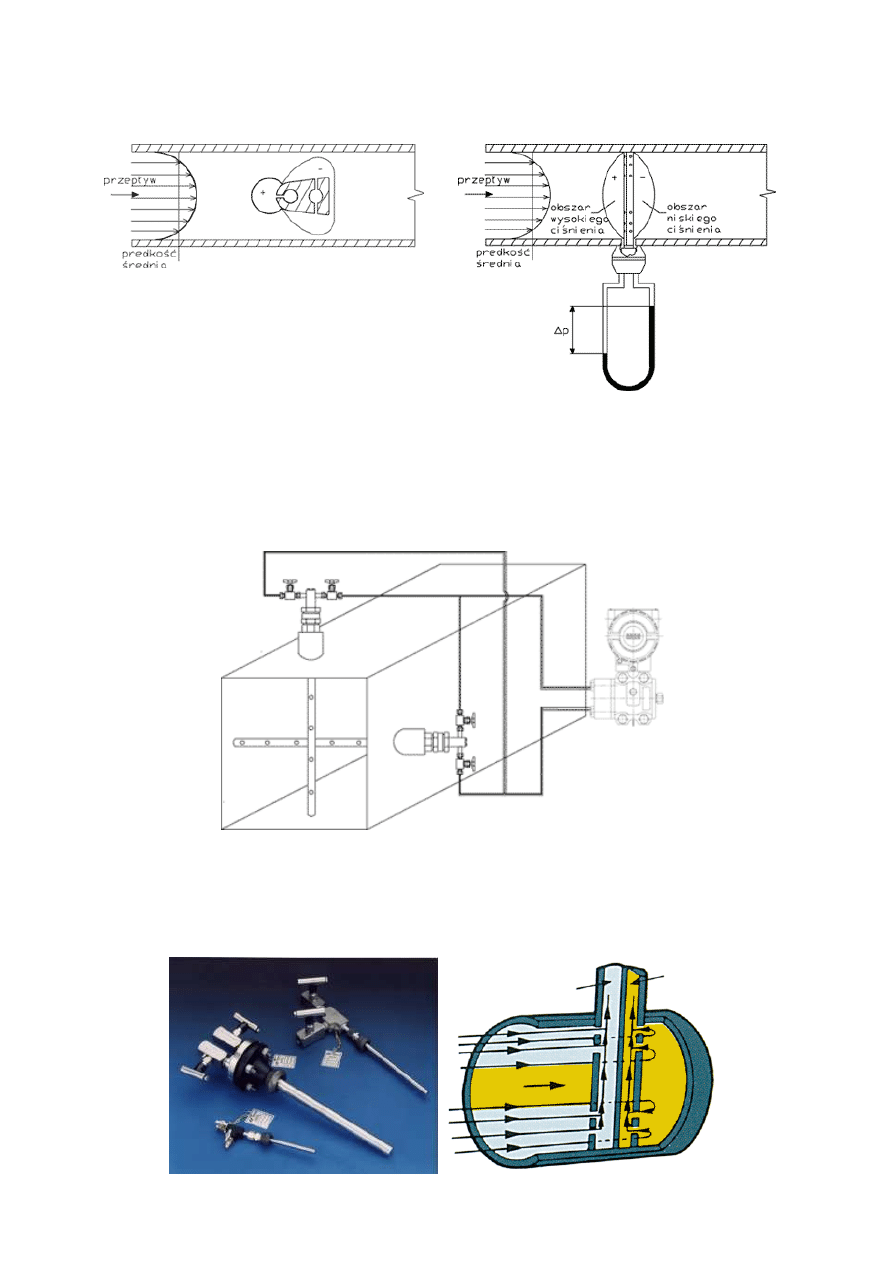
Spływaj
ą
ce z kraw
ę
dzi medium tworzy pewn
ą
powierzchni
ę
, dokładniej warstw
ę
rozdziału (rys. 38) pomi
ę
dzy cz
ęś
ci
ą
o wzgl
ę
dnie wysokiej pr
ę
dko
ś
ci (niezaburzonej), a
cz
ęś
ci
ą
znajduj
ą
c
ą
si
ę
we wzgl
ę
dnym zastoju (za kraw
ę
dzi
ą
przeszkody).
Rys. 38. Zjawiska zachodz
ą
ce na powierzchni rozdziału
Lokalne zmiany pr
ę
dko
ś
ci powoduj
ą
powstawanie stref podci
ś
nienia (lokalne
zwi
ę
kszenie pr
ę
dko
ś
ci strugi) i nadci
ś
nienia, co prowadzi do powstawania szeregu wirów
nazywanych wirami Karmana. Przykładowo wiry te powoduj
ą
łopotanie flag na wietrze.
Powstaj
ą
ce na przemian zawirowania (rys.39), wywołane umieszczon
ą
w strudze belk
ą
spi
ę
trzaj
ą
c
ą
, powoduj
ą
zmienne napr
ęż
enia działaj
ą
ce na belk
ę
, które s
ą
rejestrowane
przez czujniki tensometryczne lub piezoelektryczne. Cz
ę
stotliwo
ść
ta jest wprost
proporcjonalna do
ś
redniej pr
ę
dko
ś
ci strumienia.
Rys. 39. Czujnik przepływomierza wirowego
Przykład przepływomierza VORTEX VTX
Przepływomierze VTX wykorzystuj
ą
zjawisko powstawania wirów za przeszkod
ą
umieszczon
ą
w strudze przepływaj
ą
cego medium, które płyn
ą
c z pr
ą
dem tworz
ą
Alej
ę
Wirów Karmana. Zawirowania powstaj
ą
z cz
ę
stotliwo
ś
ci
ą
wprost proporcjonalna do
pr
ę
dko
ś
ci przepływu oraz stałej Strouhala:
vh
f
S
=
gdzie: f – cz
ę
stotliwo
ść
,
h- szeroko
ść
belki zakłócaj
ą
cej,
v-
ś
rednia pr
ę
dko
ść
strugi.
Liczba Strouhala jest stała w szerokim zakresie liczb Reynoldsa, a zatem w tym
zakresie nie zale
ż
y od g
ę
sto
ś
ci mierzonego medium. Graniczn
ą
doln
ą
warto
ś
ci
ą
liczby
Reynoldsa, poni
ż
ej, której nie stosuje si
ę
przepływomierzy wirowych jest warto
ść
5000; dla
Re<5000 warto
ść
liczby Strouhala szybko si
ę
zwi
ę
ksza.
1. ruroci
ą
g pomiarowy
2. belka spi
ę
trzaj
ą
ca
3. płytka spr
ęż
ynuj
ą
ca z czujnikiem
4. kierunek strugi
5. powstaj
ą
ce wiry
Belka spi
ę
trzaj
ą
ca przepływomierzy VTX ma kształt trapezoidalny z wbudowanym
czujnikiem piezoelektrycznym, który reaguje na zmienne ci
ś
nienie wirów, przetwarzaj
ą
c je
na standardowy sygnał elektryczny.
Przepływomierze wirowe mierz
ą
przepływ obj
ę
to
ś
ciowy, masowy lub pr
ę
dko
ś
ci przepływu.
Słu
żą
do pomiaru cieczy i gazów czystych b
ą
d
ź
lekko zanieczyszczonych. Na generatorze
wirów (belce spi
ę
trzaj
ą
cej) nie powinny odkłada
ć
si
ę
zanieczyszczenia. Osady mog
ą
zmieni
ć
ostrokraw
ę
dziowy kształt generatora na opływowy, co mo
ż
e powodowa
ć
zanikanie
generacji wirów. Zalet
ą
tych przepływomierzy jest du
ż
a dokładno
ść
niezale
ż
nie od g
ę
sto
ś
ci
medium, czy te
ż
chwilowej warto
ś
ci nat
ęż
enia przepływu.
Zakresowo
ść
przepływomierzy wirowych 50:1 i 65:1, bł
ą
d pomiaru aktualnej warto
ś
ci
strumienia w granicach 0,5÷1%, zakres pomiarowy od 0,09 m/s do 4,5 m/s; ciecz 0,6
÷
1000
m
3
/h zale
ż
nie od
ś
rednicy ruroci
ą
gu. Wymagane odcinki proste 10
÷
35 DN przed oraz
5DN
za miernikiem.
11.4. Przepływomierze z wyj
ś
ciem impulsowym; tachometryczne
wirnikowe i komorowe
W przepływomierzach tachometrycznych przepływaj
ą
ce medium nap
ę
dza wstawiony
do ruroci
ą
gu element pomiarowy poruszaj
ą
cy si
ę
ruchem obrotowym. Wykorzystuje si
ę
proporcjonalno
ść
pr
ę
dko
ś
ci obrotowej wirnika do obj
ę
to
ś
ciowego nat
ęż
enia przepływu.
Mo
ż
emy wyró
ż
ni
ć
w tej grupie dwie odmiany przepływomierzy – turbinkowe i komorowe
(obj
ę
to
ś
ciowe).
Przepływomierze turbinkowe nale
żą
do najdokładniejszych. Bł
ą
d pomiaru do ±0.25%
aktualnej warto
ś
ci strumienia.
Ś
rednice nominalne ruroci
ą
gów DN 4 ÷ 750; zakresowo
ść
do
50:1. Wymagaj
ą
prostych odcinków pomiarowych (10÷20)D - przed przepływomierzem, do
5D – za przepływomierzem.
Dla przepływomierzy tego typu bardzo wa
ż
nym parametrem jest stała K. Jest ona
okre
ś
lona jako ilo
ść
impulsów na obj
ę
to
ść
mierzonego medium (zwykle impuls/litr lub
impuls/m
3
). Na charakterystyk
ę
przepływomierzy wpływa szereg czynników: parametry
geometryczne turbinki, g
ę
sto
ść
oraz lepko
ść
przepływaj
ą
cego medium, moment tarcia w
ło
ż
yskach. Dla cieczy stosuje si
ę
ło
ż
yska
ś
lizgowe ze wzgl
ę
du na wła
ś
ciwo
ś
ci smaruj
ą
ce,
dla gazów stosowane s
ą
ło
ż
yska toczne zakryte, samosmaruj
ą
ce.
Rys. 40. Schemat przepływomierza turbinowego oraz charakterystyczne kształty i wymiary
turbinki a) dla małych przepływów, b) dla gazów
Dla przepływomierzy turbinkowych producent zwykle podaje stał
ą
K oraz
charakterystyk
ę
zmian stałej K w funkcji cz
ę
stotliwo
ś
ci. Dzi
ę
ki temu istnieje mo
ż
liwo
ść
usuni
ę
cia nieliniowo
ś
ci przepływomierza, a tym samym poprawienie jego dokładno
ś
ci do
poziomu powtarzalno
ś
ci pomiarów poprzez wpisanie tej charakterystyki do inteligentnego
przetwornika.
Podobnie przepływomierze komorowe; stosowane s
ą
tam gdzie wymagana jest
wysoka dokładno
ść
(np. paliwo na stacjach benzynowych). Cechuje je bardzo du
ż
a
zakresowo
ść
do 300:1. Praktycznie nie wymagaj
ą
prostych odcinków pomiarowych, chocia
ż
przepisy wymagaj
ą
zastosowania odcinków rz
ę
du 3D. Przepływomierze komorowe mo
ż
na
stosowa
ć
do gazów i cieczy nawet do bardzo g
ę
stych o konsystencji smaru. Wymagaj
ą
cieczy bardzo czystych, poniewa
ż
składaj
ą
si
ę
z elementów precyzyjnie obrobionych
mechanicznie i dokładnie spasowanych. Zanieczyszczenia mechaniczne mog
ą
uszkodzi
ć
przepływomierz i zblokowa
ć
przepływ medium.
Przepływomierze obj
ę
to
ś
ciowe z elementami owalno-kołowymi
Układ pomiarowy przepływomierzy obj
ę
to
ś
ciowych firmy Bopp&Reuther składa si
ę
z
dwóch
ś
ci
ś
le zaz
ę
biaj
ą
cych si
ę
elementów owalno-kołowych, poruszanych przez
przepływaj
ą
ce medium.
Rys. 41. Zasada działania obj
ę
to
ś
ciowego przepływomierza a) z elementami owalno-
kołowymi, b) gazomierza rotorowego
Ka
ż
dy obrót pary elementów owalno-kołowych odpowiada przemieszczeniu przez
miernik dokładnie znanej obj
ę
to
ś
ci cieczy V
1
i V
2
. Liczba obrotów jest proporcjonalna do
pr
ę
dko
ś
ci przepływaj
ą
cego medium. Układ specjalnych przekładni przekazuje informacj
ę
o
liczbie obrotów do licznika mechanicznego, który zlicza przepływ w jednostkach obj
ę
to
ś
ci
(litry, m
3
).
Dla gazów stosowane s
ą
gazomierze rotorowe. Maj
ą
inny kształt obracaj
ą
cych si
ę
elementów – zarys ewolwentowy. Przykładowe rozwi
ą
zania przepływomierzy komorowych
przedstawiono na rys. 42
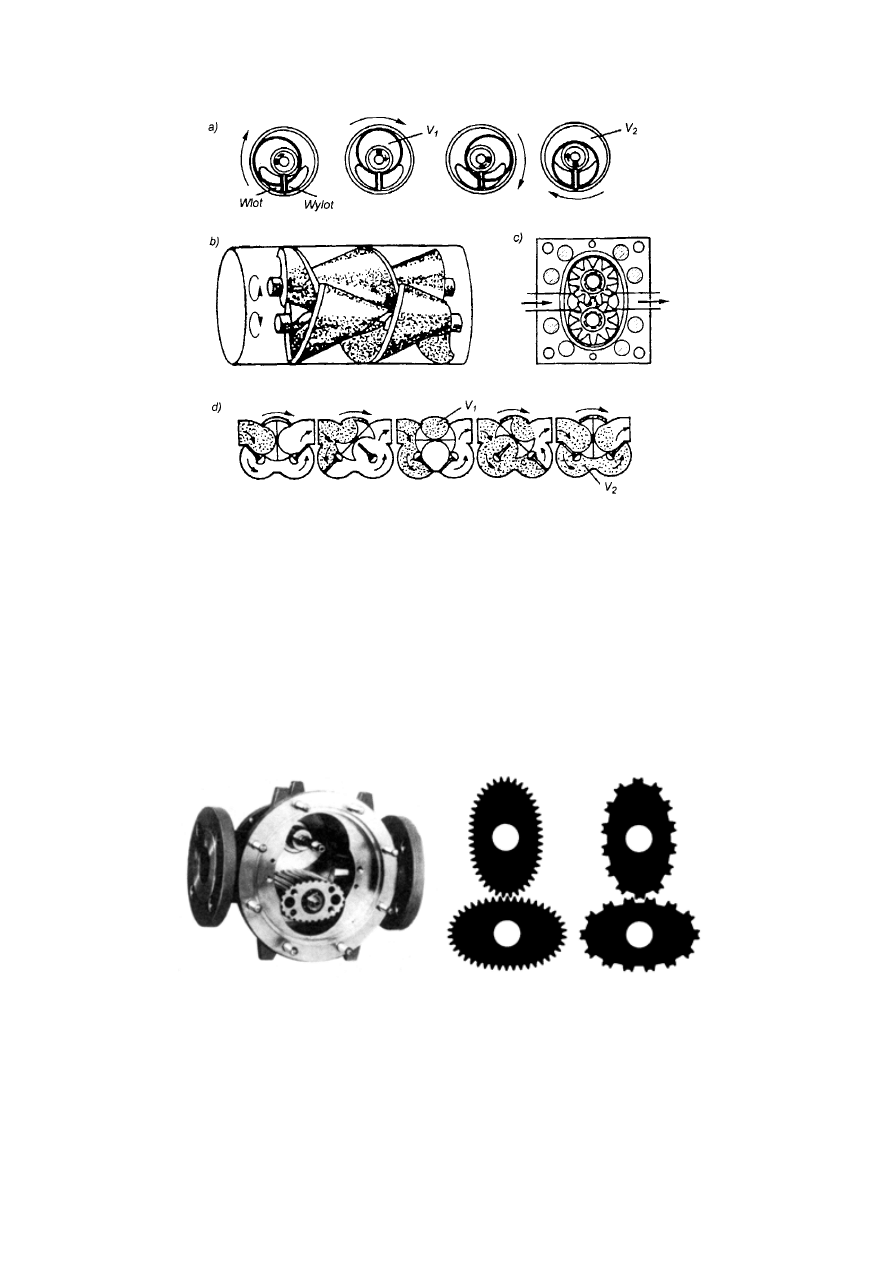
Rys. 42. Ró
ż
ne konstrukcje przepływomierzy komorowych a) puszkowy, b)
ś
rubowy, c)
z
ę
baty, d) z obrotowymi skrzydełkami
Mechanizm pomiarowy ka
ż
dego z przepływomierzy owalno-kołowych składa si
ę
z
nast
ę
puj
ą
cych cz
ęś
ci:
•
korpusu,
•
pary elementów owalno kołowych,
•
nakładki komory pomiarowej,
•
przył
ą
czy kołnierzowych lub
ś
rubowych.
Głowica pomiarowa jest hermetycznie oddzielona od mechanizmu pomiarowego, czyli
elementów owalno-kołowych.
Ruch obrotowy obu elementów jest przekazywany poprzez
układ sprz
ę
gła magnetycznego do licznika mechanicznego lub za pomoc
ą
czujnika
indukcyjnego do układu zdalnego zliczania przepływu
.
Du
żą
zalet
ą
przepływomierzy owalno-kołowych jest fakt,
ż
e nie wymagaj
ą
one
odcinków prostych do monta
ż
u. Umo
ż
liwiaj
ą
pomiar cieczy o du
ż
ych lepko
ś
ciach, przy
jednoczesnym niewielkim spadku ci
ś
nienia na przepływomierzu. Dokładno
ść
si
ę
gaj
ą
ca 0.1%
powoduje,
ż
e omawiane przepływomierze s
ą
niezast
ą
pione tam gdzie wymagana jest du
ż
a
precyzja pomiaru. Mo
ż
na je stosowa
ć
w warunkach laboratoryjnych (
ś
rednice od 6 do 25
mm), jak i du
ż
ych obiektach przemysłowych (
ś
rednice od 25 do 100 mm).
Przepływomierze obj
ę
to
ś
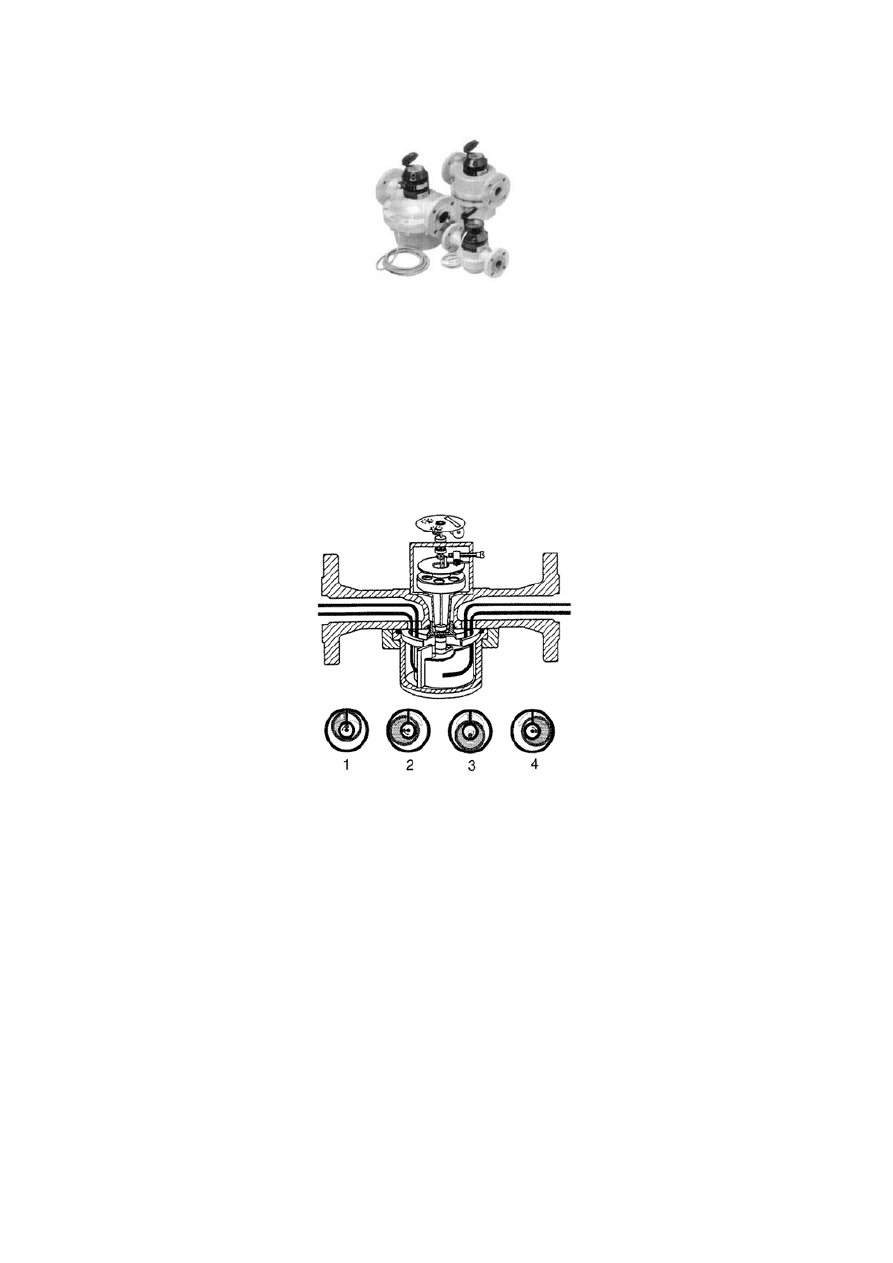
ciowe system CONTOIL i DOMINO
Przepływomierze obj
ę
to
ś
ciowe systemu DOMINO ARD i CONYOIL VZO działaj
ą
na
zasadzie pompki z wiruj
ą
cym tłokiem przepompowuj
ą
c okre
ś
lone porcje mierzonego
medium i zliczaj
ą
c ich ilo
ść
. Tym samym mierz
ą
one rzeczywist
ą
obj
ę
to
ść
płynu
przepływaj
ą
cego w ruroci
ą
gu w danym czasie.
Urz
ą
dzenie składa si
ę
z tłoka usytuowanego mimo
ś
rodowo wewn
ą
trz wi
ę
kszego
cylindra posiadaj
ą
cego dwa otwory (wlotowy i wylotowy) rozdzielone od siebie przegrod
ą
,
wzdłu
ż
której przesuwa si
ę
cylindryczny tłok. W pierwszej fazie (1, 2) pracy ciecz wpływaj
ą
c
poprzez otwór wlotowy wypełnia przestrze
ń
pomi
ę
dzy przegrod
ą
i wn
ę
trzem cylindrycznego
tłoka powoduj
ą
c jego ruch. W nast
ę
pnej fazie (3, 4) ta ciecz wydostaje si
ę
poprzez otwór
wylotowy. Za ka
ż
dym takim cyklem okre
ś
lona ilo
ść
cieczy jest przepompowana z otworu
wlotowego do otworu wylotowego.
Wiruj
ą
cy tłok i rolka prowadz
ą
ca s
ą
jedynymi ruchomymi cz
ęś
ciami b
ę
d
ą
cymi w
kontakcie z ciecz
ą
. Przemieszczanie si
ę
wiruj
ą
cego tłoka jest przekazywane do układów
zliczania i odczytu za pomoc
ą
sprz
ę
gła magnetycznego.
Przepływomierze takiej konstrukcji umo
ż
liwiaj
ą
osi
ą
gni
ę
cie du
ż
ej dokładno
ś
ci.
Szczególnie tam gdzie mała ilo
ść
miejsca uniemo
ż
liwia zastosowanie odcinków prostych
ruroci
ą
gu wymaganych dla przepływomierzy mierz
ą
cych pr
ę
dko
ść
przepływu.
Przetwarzanie ruchu obrotowego wirnika, turbinki, elementu owalno-kołowego na
sygnał okre
ś
laj
ą
cy ilo
ść
przepływaj
ą
cego medium mo
ż
e by
ć
zrealizowany na kilka
sposobów:
1. w obracaj
ą
cym si
ę
elemencie umieszcza si
ę
trwały magnes, a na zewn
ą
trz cewk
ę
, w
której b
ę
dzie si
ę
indukowa
ć
przemienne napi
ę
cie o cz
ę
stotliwo
ś
ci równej
cz
ę
stotliwo
ś
ci obrotów turbinki, wirnika, rotora irp.
2. zastosowa
ć
zbli
ż
eniowy czujnik elektromagnetyczny wykorzystuj
ą
cy pr
ą
dy wirowe,
3. fotoelektryczne
czujniki
pr
ę
dko
ś
ci
(gdy
dysponujemy
małym
momentem
nap
ę
dowym).
Przepisy metrologiczne i legalizacyjne wymagaj
ą
do rozlicze
ń
liczników mechanicznych.
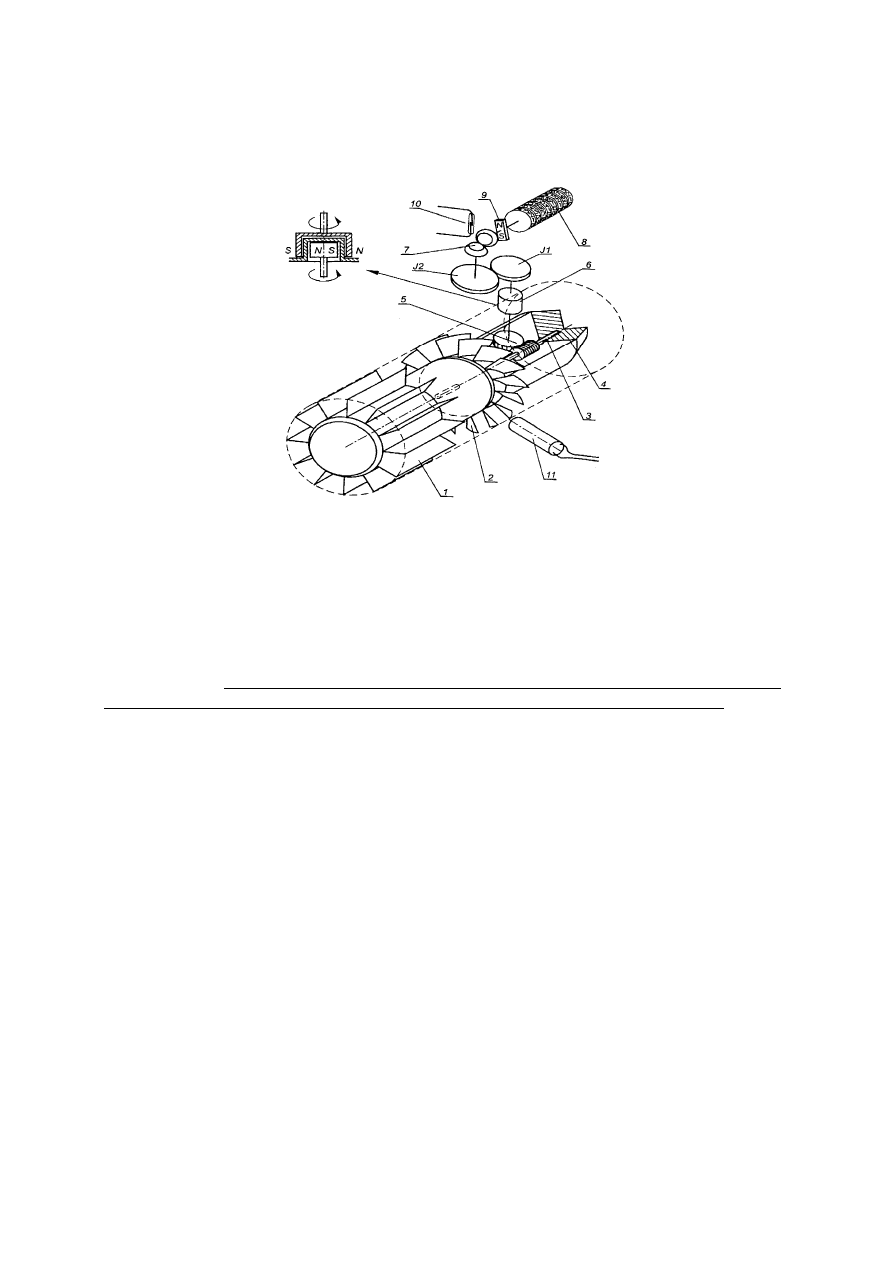
Przykład gazomierza turbinowego z takim licznikiem przedstawia rys. 43.
Rys. 43. Schemat wyprowadzenia ruchu obrotowego turbinki do liczydła mechanicznego na
przykładzie gazomierza turbinowego.
1 – prostownica strumienia, 2 – turbinka, 3 – o
ś
turbinki, 4 –
ło
ż
yska turbinki, 5 – przekładnia
ś
limakowa, 6 – sprz
ę
gło magnetyczne, J1, J2 – koła z
ę
bate
justuj
ą
ce, 7 – przekładnia sto
ż
kowa, 8 – liczydło mechaniczne, 9 – magnes, 10 – kontaktron, 11-
czujnik indukcyjny łopatek turbinki
11.5. Przepływomierze elektromagnetyczne
Przepływomierz elektromagnetyczny nadaje si
ę
do pomiarów cieczy równie
ż
zabrudzonych. Podstawowym warunkiem jest, aby przewodno
ść
elektryczna (inaczej
konduktywno
ść
mierzona w simensach na metr) cieczy była wi
ę
ksza od > 10
µ
S/cm. Z tego
wzgl
ę
du przepływomierze elektromagnetyczne nie mog
ą
by
ć
stosowane do pomiaru
nat
ęż
enia przepływu paliw i olejów ze wzgl
ę
du na ich dielektryczny charakter. Pomiar
odbywa si
ę
bez strat ci
ś
nienia i przy niskim zu
ż
yciu energii. Własno
ś
ci medium, zmiany
ci
ś
nienia, temperatury i g
ę
sto
ś
ci nie wpływaj
ą
na dokładno
ść
pomiaru. Przepływomierz
elektromagnetyczny mierzy obj
ę
to
ś
ciowy strumie
ń
przepływaj
ą
cej cieczy ł
ą
cznie ze
znajduj
ą
cymi si
ę
w niej ciałami stałymi oraz p
ę
cherzami powietrza.
Zasada
pomiaru
oparta
jest
na
znanym
prawie
dotycz
ą
cym
indukcji
elektromagnetycznej mówi
ą
cym,
ż
e je
ś
li w polu magnetycznym o indukcji B porusza si
ę
przewodniku o długo
ś
ci L z pr
ę
dko
ś
ci
ą
ś
redni
ą
w, to w nim indukuje si
ę
siła
elektromotoryczna o warto
ś
ci E. Warto
ść
siły elektromotorycznej mo
ż
na wyznaczy
ć
ze
wzoru:
E = B L w
Schemat przepływomierza wykorzystuj
ą
cego t
ę
zasad
ę
przedstawia rys. 44.
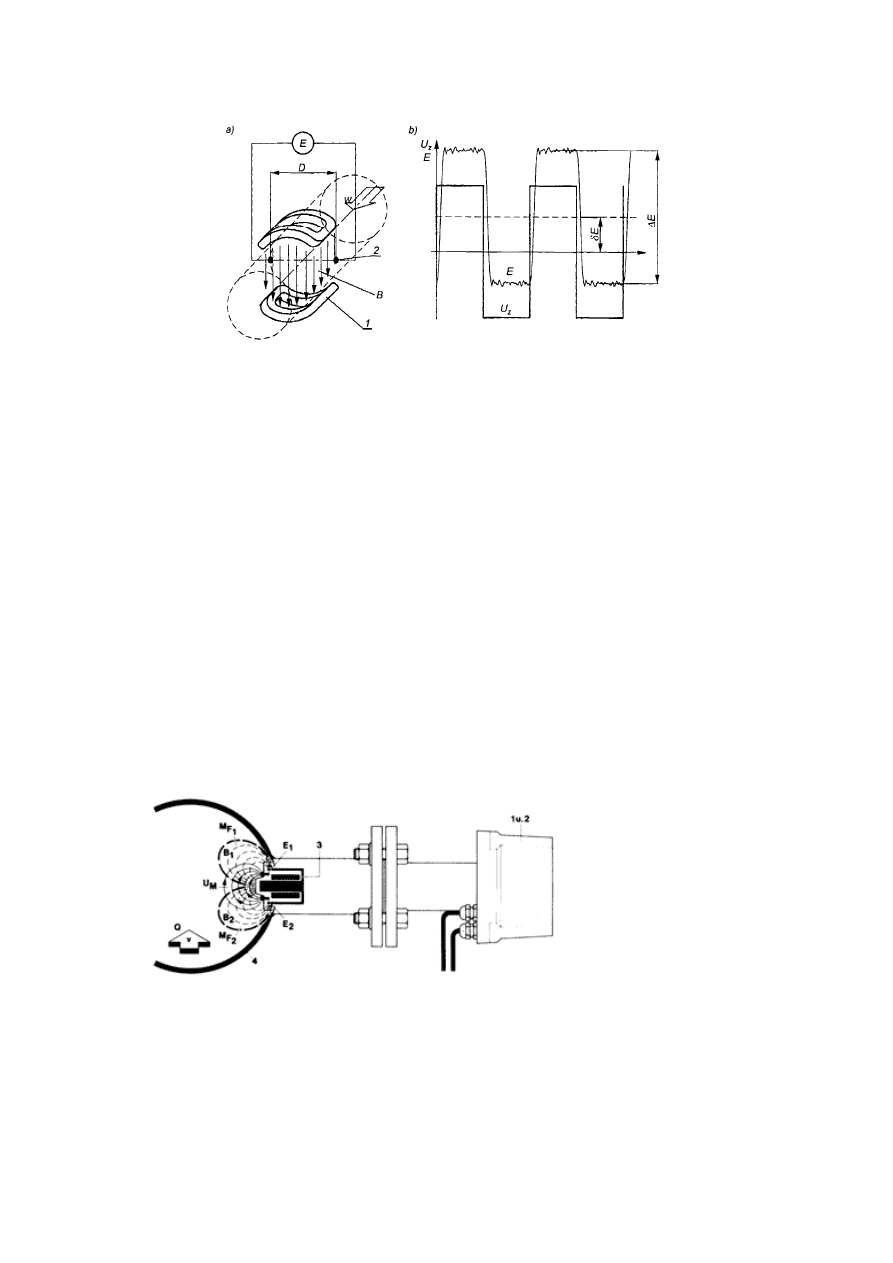
Rys. 44. a) schemat przepływomierza elektromagnetycznego 1 – cewki, 2 – elektrody
pomiarowe, b) przebieg napi
ę
cia zasilaj
ą
cego cewki i przebieg indukowanej siły
elektromotorycznej na elektrodach pomiarowych
Rol
ę
przewodnika pełni przepływaj
ą
cy strumie
ń
ze
ś
redni
ą
pr
ę
dko
ś
ci w. Siła
elektromotoryczna zbierana jest poprzez elektrody 2, pole magnetyczne wytwarzaj
ą
cewki 1
nało
ż
one na ruroci
ą
g. Pole magnetyczne powinno by
ć
jednorodne, wówczas warto
ść
siły
elektromotorycznej dla tak skonstruowanego przepływomierza mo
ż
na okre
ś
li
ć
E = k B D w
k – stała wyznaczana podczas wzorcowania przepływomierza.
Poniewa
ż
ś
rednia pr
ę
dko
ść
jest proporcjonalna do strumienia obj
ę
to
ś
ci mo
ż
na zapisa
ć
,
ż
e
E = k
1
B D q
V
Z rys. 44 wida
ć
,
ż
e mimo dokładnie prostok
ą
tnego napi
ę
cia zasilania wyidukowana siła
elektromotoryczna nie ma podobnego charakteru i jej
ś
rednia warto
ść
jest przesuni
ę
ta o
δ
E.
Przyczyn tego jest wiele: potencjały elektrochemiczne pojawiaj
ą
ce si
ę
na elektrodach, wpływ
ró
ż
nego rodzaju zewn
ę
trznych pól elektromagnetycznych (np. zakłócenia przemysłowe) i
magnetycznych (np. pole ziemskie).
Przykłady rozwi
ą
za
ń
technicznych przepływomierzy elektromagnetycznych.
PIT
1 – przetwornik
2 – obudowa przetwornika
3 cewka magnesująca
4 – rurociąg
E
1
, E
2
– elektrody pomiarowe
B
1
, B
2
– pole magnetyczne
MF1 i MF2 – pola pomiaru
UM – sygnał napięciowy
Q – przepływ
V – prędkość przepływu
Przepływomierz elektromagnetyczny zbudowany jest z czujnika, który odbiera sygnał
indukowany w przepływaj
ą
cym medium oraz modułu przetwarzaj
ą
cego sygnał z czujnika na
sygnał pr
ą
dowy lub impulsowy (impuls / jedn. obj
ę
to
ś
ci).
1. przetwornik
2. obudowa przetwornika
3. uszczelka
4. moduł przej
ś
ciowy
5. czujnik z przył
ą
czem kołnierzowym
6. króciec
monta
ż
owy
wspawany
w
kołnierz
7. cewka magnesuj
ą
ca
8. elektroda
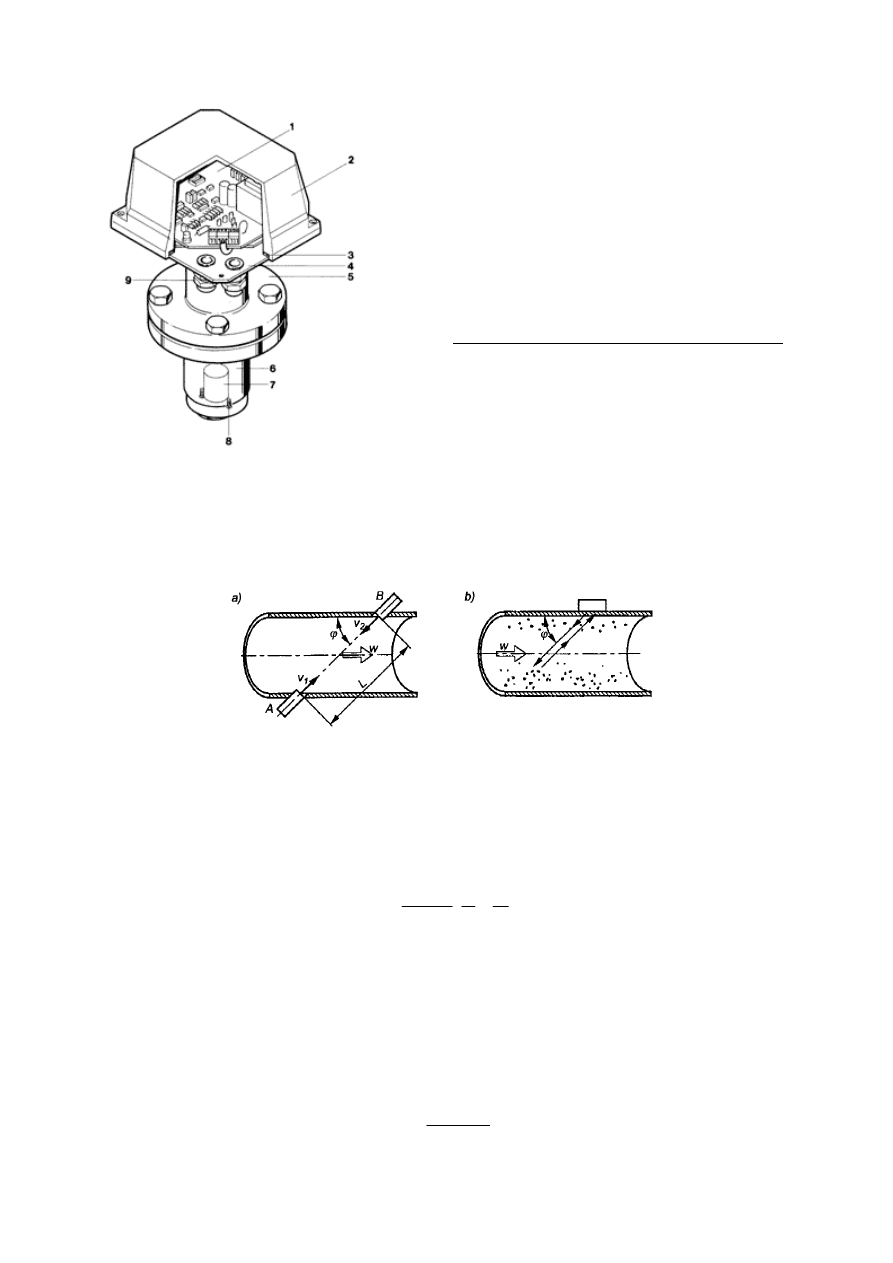
11.6. Przepływomierz ultrad
ź
wi
ę
kowy
Zasada działania bezinwazyjnych przepływomierzy ultrad
ź
wi
ę
kowych oparta jest na
dwóch metodach: pomiar czasu przej
ś
cia fali ultrad
ź
wi
ę
kowej i efekcie Dopplera.
Rys.46. Schemat jednodrogowego przepływomierza ultrad
ź
wi
ę
kowego: a) wykorzystuj
ą
cego
pomiar czasu przej
ś
cia impulsu, b) dopplerowskiego
Literami A i B oznaczono piezoelektryczne nadajniki, które s
ą
jednocze
ś
nie odbiornikami fali
ultrad
ź
wi
ę
kowej dzi
ę
ki odwracalno
ś
ci efektu piezoelektrycznego.
Pierwszy sposób pozwala wyznaczy
ć
warto
ść
ś
redniej pr
ę
dko
ś
ci przepływu strumienia
z
poni
ż
szej zale
ż
no
ś
ci w oparciu o ró
ż
nic
ę
czasu przej
ś
cia fali na drodze AB:
)
1
1
(
cos
2
2
1
t
t
L
w
−
=
ϕ
gdzie t
1
i t
2
oznaczaj
ą
czasy przej
ś
cia fali na drodze AB i BA.
Cecha charakterystyczn
ą
jest tutaj brak zale
ż
no
ś
ci pr
ę
dko
ś
ci strumienia od pr
ę
dko
ś
ci
rozchodzenia si
ę
d
ź
wi
ę
ku w przepływaj
ą
cym medium (mierzonym o
ś
rodku).
Drugi sposób (rys. b) wykorzystuje efekt Dopplera polegaj
ą
cy na ró
ż
nicy
cz
ę
stotliwo
ś
ci pomi
ę
dzy fal
ą
wysłan
ą
, a odbit
ą
od poruszaj
ą
cych si
ę
cz
ą
steczek
. Mog
ą
nimi
by
ć
p
ę
cherzyki powietrza, cz
ą
stki stałe np. w gazach, wiry zawarte w płyn
ą
cym strumieniu.
Warto
ść
pr
ę
dko
ś
ci przepływu mo
ż
na wyznaczy
ć
z zale
ż
no
ś
ci:
ϕ
cos
2 f
f
c
w
∆
=
gdzie: f - cz
ę
stotliwo
ść
fali wysłanej,
∆
f - dopplerowska ró
ż
nica cz
ę
stotliwo
ś
ci, c – pr
ę
dko
ść
d
ź
wi
ę
ku w mierzonym o
ś
rodku.
Umo
ż
liwiaj
ą
pomiar przepływu obj
ę
to
ś
ciowego, zliczanie obj
ę
to
ś
ci, pomiar przepływu
masowego, zliczanie masy, pomiar pr
ę
dko
ś
ci przepływu fali ultrad
ź
wi
ę
kowej w o
ś
rodku.
Pomiar jest niezale
ż
ny od zmian temperatury cieczy, jej g
ę
sto
ś
ci, ci
ś
nienia i przewodno
ś
ci
elektrycznej. Przepływomierze ultrad
ź
wi
ę
kowe s
ą
dokładne, nie powoduj
ą
strat ci
ś
nienia,
dokładno
ść
lepsza ni
ż
0,5% aktualnej wielko
ś
ci przepływu, du
ż
a stabilno
ść
pomiaru.
Przeznaczone s
ą
do pomiaru cieczy czystych. Brak cz
ęś
ci ruchomych zapewnia wysok
ą
niezawodno
ść
.
Przepływomierz ultrad
ź
wi
ę
kowy firmy Dynasonics
Przepływomierze wykorzystuj
ą
ce efekt Dopplera stosuje si
ę
do pomiaru przepływu
cieczy zanieczyszczonych
. Ilo
ść
stałych zanieczyszcze
ń
powinna by
ć
wi
ę
ksza od 50 ppm,
jednak nie mo
ż
e przekracza
ć
3% mierzonego medium. W przypadku cieczy czystych rol
ę
zanieczyszcze
ń
spełniaj
ą
zawirowania pojawiaj
ą
ce si
ę
w strumieniu przepływaj
ą
cego
medium. Z tego powodu zaleca si
ę
, aby sondy były montowane nie dalej ni
ż
5
ś
rednic
ruroci
ą
gu za kolankiem lub innym elementem zakłócaj
ą
cym.
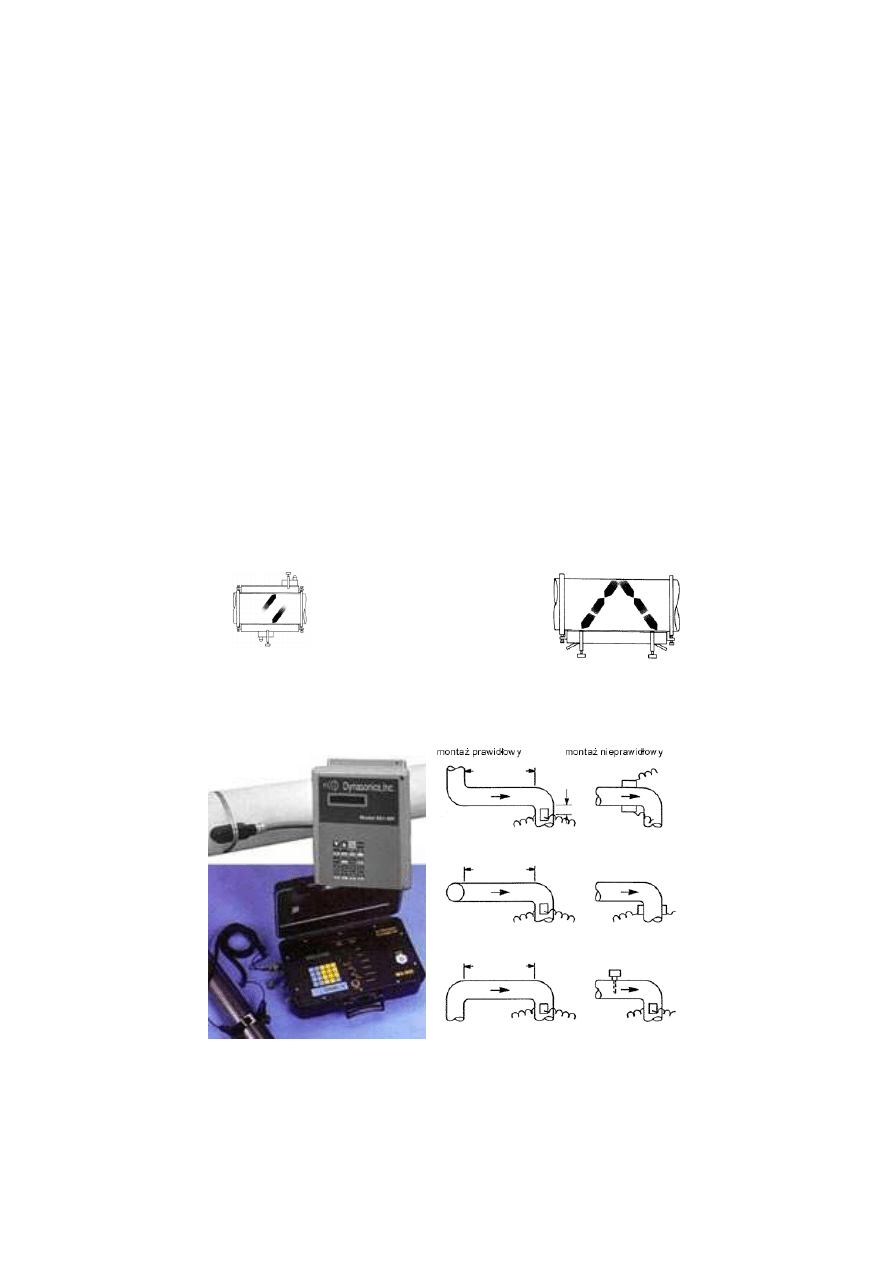
Pomiar czasu przej
ś
cia stosuje si
ę
do cieczy czystych
. Zasada działania oparta jest
na fakcie,
ż
e pr
ę
dko
ść
, z jak
ą
rozchodzi si
ę
fala ultrad
ź
wi
ę
kowa w kierunku zgodnym z
kierunkiem przepływu jest wi
ę
ksza, ni
ż
gdy fala propaguje w kierunku przeciwnym do
kierunku przepływu medium. Wynikaj
ą
ca z tego ró
ż
nica czasów przej
ś
cia fali od sondy
b
ę
d
ą
cej nadajnikiem fali do odbiornika jest proporcjonalna do przepływu obj
ę
to
ś
ciowego. W
zale
ż
no
ś
ci od sposobu monta
ż
u rozró
ż
niamy metod
ę
przej
ś
cia i metod
ę
odbicia, co
pokazuje rys. 47.
a)
b)
Rys. 47. Sposoby monta
ż
u sond w przypadku a) metody przej
ś
cia, b) metody odbicia
Rys. 48. Widok przepływomierza i sposoby monta
ż
u sond w metodzie Dopplera dla cieczy
czystych.
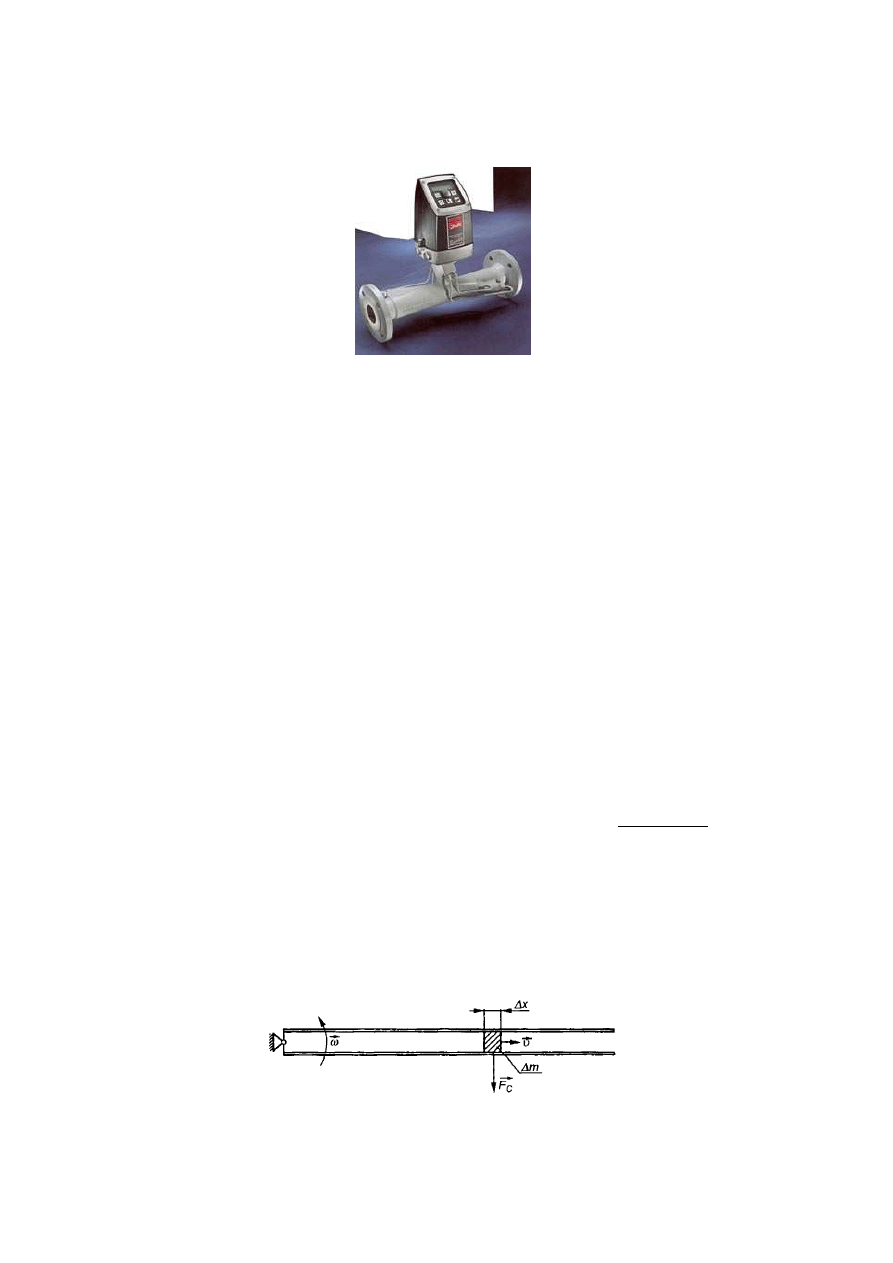
Przepływomierz SONOFLO
Wielko
ść
przepływu jest wyznaczana poprzez pomiar ró
ż
nicy czasu
∆
t przej
ś
cia fali
d
ź
wi
ę
kowej mi
ę
dzy sondami w kierunku zgodnym i przeciwnym do kierunku przepływu
cieczy.
Ś
rednia wielko
ść
czasu przej
ś
cia T reprezentuje wielko
ść
pr
ę
dko
ś
ci d
ź
wi
ę
ku w
o
ś
rodku.
Q = K
∆
t / T
2
gdzie: Q – wielko
ść
przepływu,
∆
t – ró
ż
nica czasu przej
ś
cia,
K – współczynnik kalibracji,
T –
ś
redni czas przej
ś
cia fali.
Przetwornik mo
ż
e współpracowa
ć
z jedna do czterech
ś
cie
ż
ek pomiarowych. Zazwyczaj s
ą
dwie
ś
cie
ż
ki d
ź
wi
ę
kowe równoległe do siebie i w pewnej odległo
ś
ci od osi ruroci
ą
gu.
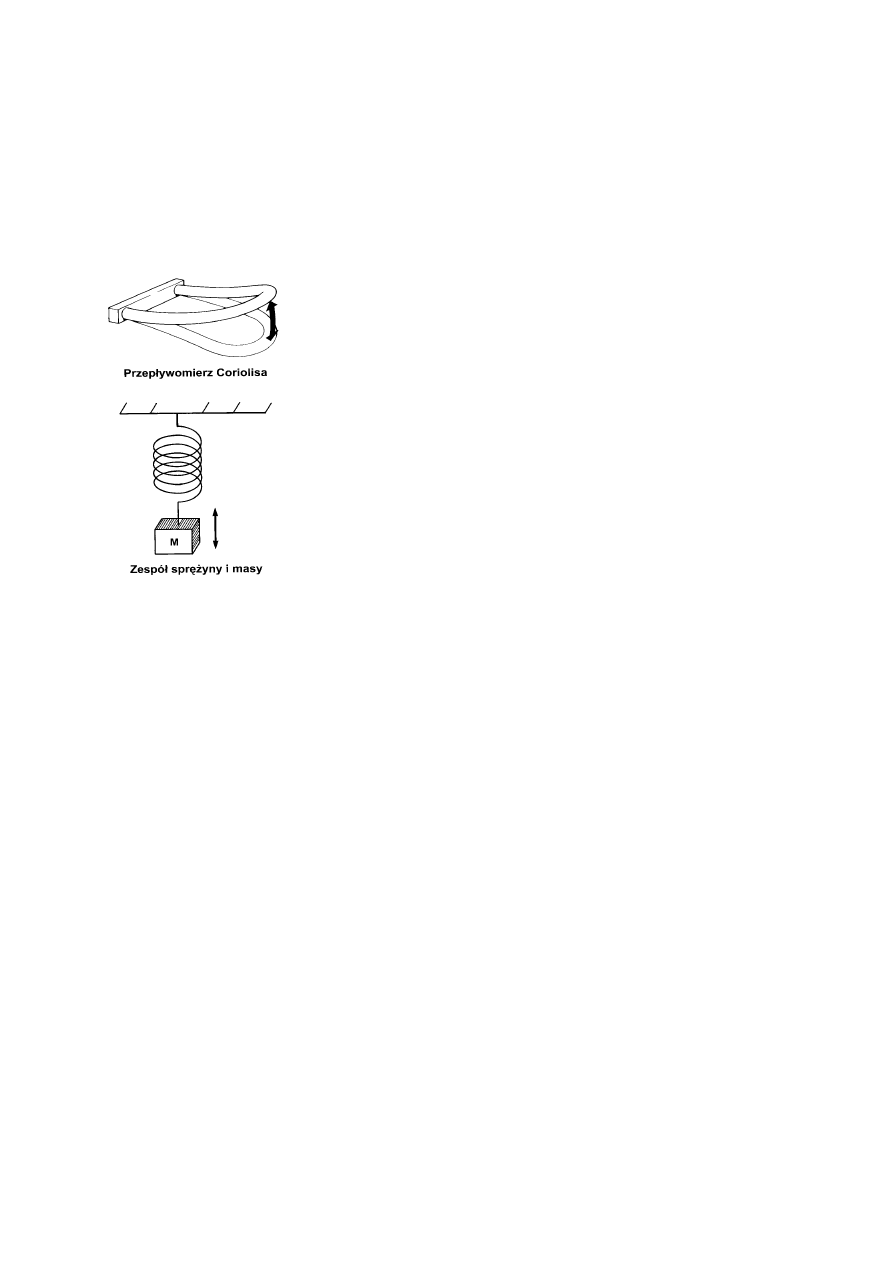
11.7. Przepływomierze masowe oparte na powstawaniu sił Coriolisa
Znaczenie pomiarów strumienia masy jest coraz znaczniejsze. Wpływa na to fakt,
ż
e
masa okre
ś
la jednoznacznie ilo
ść
materii niezale
ż
nie od warunków pomiaru i miejsca, w
którym si
ę
go dokonuje. Znaj
ą
c temperatur
ę
i mas
ę
przesyłanego medium mo
ż
emy np.
okre
ś
li
ć
ilo
ść
przesyłanej energii. Dzi
ę
ki swym wła
ś
ciwo
ś
ciom przepływomierze Coriolisa
nadaj
ą
si
ę
do pomiaru przepływu mediów, których nie da si
ę
mierzy
ć
metodami
tradycyjnymi, jak: aceton, amoniak, farby, lakiery, szlam w
ę
glowy, tworzywa sztuczne,
mydło,
ż
ywice, a tak
ż
e czekolada, melasa, majonezy, koncentraty, itp.
Z uwagi na mał
ą
g
ę
sto
ść
gazów, przepływomierze Coriolisa nie znajduj
ą
na razie,
szerokiego zastosowania dla tego rodzaju medium.
Zasada działania
Je
ś
li ciało o masie m przemieszcza si
ę
z pr
ę
dko
ś
ci
ą
liniow
ą
v w układzie, który obraca si
ę
w
pr
ę
dko
ś
ci
ą
k
ą
tow
ą
ω
, to działa na nie siła Coriolisa
F
C
= 2 m
ω
v sin
α
gdzie
α
jest k
ą
tem pomi
ę
dzy wektorami
ω
i v.
Rys. 49. Siła Coriolisa F
C
jako wynik superpozycji ruchu post
ę
powego i obrotowego
elementu płynu
Bior
ą
c pod uwag
ę
przekrój poprzeczny ruroci
ą
gu A mo
ż
emy okre
ś
li
ć
strumie
ń
masy
Q
m
= v
ρ
A
Poniewa
ż
g
ę
sto
ść
ρ
mo
ż
na okre
ś
li
ć
wzorem
ρ
=
∆
m/A
∆
x, to otrzymamy zale
ż
no
ść
m
C
q
x
F
ω
2
=
∆
∆
z której wynika,
ż
e siła Coriolisa przypadaj
ą
ca na jednostk
ę
długo
ś
ci przewodnika jest
proporcjonalna do strumienia masy.
W praktyce przy wzorcowaniu przepływomierzy Coriolisa stosuje si
ę
równanie
f
a
A
K
q
m
1
=
gdzie: A – amplituda drga
ń
wzbudzonych w przepływomierzu, a – amplituda drga
ń
wtórnych,
wywołanych oddziaływaniem sił Coriolisa, f – cz
ę
stotliwo
ść
wzbudzonych drga
ń
, K – stała
wzorcowania.
Stała K jest stała w danej temperaturze. Ze zmiana temperatury nast
ę
puje zmiana
geometrii przewodu, a zwłaszcza modułu spr
ęż
ysto
ś
ci materiału ruroci
ą
gu. Nale
ż
y, wi
ę
c
uwzgl
ę
dnia
ć
poprawki stałej K ze wzgl
ę
du na zmiany temperatury.
Firm
ą
, która pierwsza podj
ę
ła seryjn
ą
produkcj
ę
przepływomierzy opartych o efekt
Coriolisa jest firma Micro-Motion.
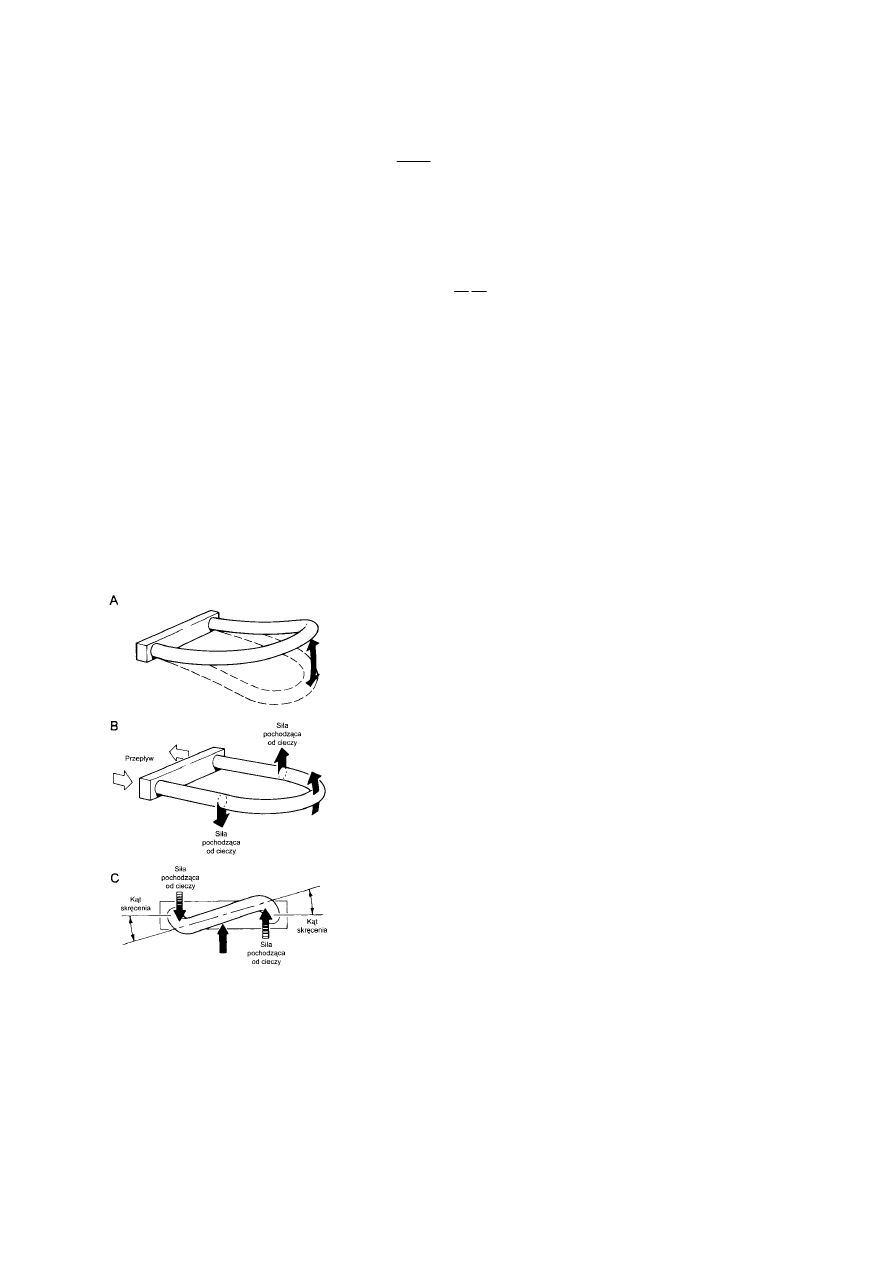
Przepływomierze Micro Motion
Układ pomiarowy przepływu tworzy czujnik z przetwornikiem sygnału. Ka
ż
dy czujnik
składa si
ę
z jednej lub dwóch rurek pomiarowych umieszczonych w specjalnej obudowie.
Wewn
ą
trz obudowy czujnika rurki pomiarowe drgaj
ą
z
cz
ę
sto
ś
ci
ą
własn
ą
(rys. A). Drgania te s
ą
wymuszane przez
pole
elektromagnetyczne
wytwarzane
przez
cewk
ę
umieszczon
ą
w geometrycznym
ś
rodku krzywizny zgi
ę
cia
rurek. Drgania, podobne do drga
ń
kamertonu, maj
ą
amplitud
ę
mniejsz
ą
od 1 mm i cz
ę
stotliwo
ść
około 80 Hz.
Ciecz wpływaj
ą
c do rurki pomiarowej jest zmuszana do
zmiany kierunku przepływu oraz poddawana jest sile w
kierunku
pionowym
–
wynikaj
ą
cej
z
momentu
pochodz
ą
cego od siły drgaj
ą
cej rurki. W czasie ruchu rurki
do góry, w pierwszej połowie cyklu drga
ń
(rys. B), ciecz
wpływaj
ą
ca do czujnika stawia opór i powoduje powstanie
siły skierowanej do dołu. W trakcie tej pierwszej połowy
cyklu drga
ń
ciecz przepływa przez zgi
ę
cie rurek i po
przeciwnej stronie wywołuje reakcj
ę
tym razem działaj
ą
c na
rurk
ę
w kierunku do góry. Tak powstała para sił pochodz
ą
ca
od cieczy powoduje skr
ę
cenie rurki. W czasie drugiego
półokresu drga
ń
, gdy rurka porusza si
ę
do dołu, nast
ę
puje
jej skr
ę
cenie w przeciwnym kierunku. Zjawisko to nosi
nazw
ę
efektu Coriolisa.
Zgodnie z drug
ą
zasad
ą
dynamiki Newtona, k
ą
t skr
ę
cenia rurki jest wprost
proporcjonalny do wielko
ś
ci nat
ęż
enia masy przez rurk
ę
.
F
Coriolisa
= 2 m v
×
ω
Elektromagnetyczne detektory pr
ę
dko
ś
ci, umieszczone z ka
ż
dej strony rurki czujnika, mierz
ą
pr
ę
dko
ść
drgaj
ą
cej rurki. Przepływ masy jest okre
ś
lany na podstawie pomiaru przesuni
ę
cia
czasowego mi
ę
dzy sygnałami z detektorów pr
ę
dko
ś
ci. Przy braku przepływu, nie nast
ę
puje
skr
ę
cenie rurki, a w rezultacie nie ma przesuni
ę
cia czasowego sygnałów z detektorów
pr
ę
dko
ś
ci. Podczas przepływu pojawia si
ę
skr
ę
cenie rurki i przesuni
ę
cie czasowe sygnałów
z detektorów pr
ę
dko
ś
ci, które jest wprost proporcjonalne do nat
ęż
enia przepływu masy.
Pomiar g
ę
sto
ś
ci
Rurka pomiarowa (lub rurki) jest umocowana na stałe w obudowie czujnika,
natomiast jako cało
ść
ma mo
ż
liwo
ść
wykonywania drga
ń
swobodnych. Układ ten mo
ż
na
przedstawi
ć
schematycznie, jako mas
ę
umocowan
ą
na spr
ęż
ynie.
Masa wyprowadzona z poło
ż
enia równowagi b
ę
dzie
wykonywa
ć
drgania harmoniczne o cz
ę
stotliwo
ś
ci własnej tzw.
rezonansowej. Cz
ę
stotliwo
ść
własna jest funkcj
ą
masy układu.
Rurka pomiarowa czujnika typu Coriolis Micro Motion zostaje
wprowadzona w drgania o cz
ę
stotliwo
ś
ci rezonansowej za pomoc
ą
cewki i układu sprz
ęż
enia zwrotnego. Cz
ę
stotliwo
ść
rezonansowa
jest funkcja geometrii układu, spr
ęż
ysto
ś
ci materiału i masy rurki.
Na mas
ę
zespołu rurki składaj
ą
si
ę
: masa rurki i masa cieczy w
rurce. Masa rurki jest stała dla danego typu czujnika. Poniewa
ż
masa cieczy w rurce jest iloczynem g
ę
sto
ś
ci cieczy i obj
ę
to
ś
ci
rurki, a obj
ę
to
ść
jest stała dla danego typu czujnika, to
cz
ę
stotliwo
ść
drga
ń
zale
ż
y od g
ę
sto
ś
ci cieczy. Tak, wi
ę
c, dla
danego typu czujnika o okre
ś
lonej geometrii, wykonanego z
danego materiału, g
ę
sto
ść
cieczy mo
ż
na okre
ś
li
ć
z pomiarów
cz
ę
stotliwo
ś
ci rezonansowej.
U
ż
ywaj
ą
c tej samej cewki i dekodera indukcyjnego, mo
ż
na uzyska
ć
sygnał
elektryczny odpowiadaj
ą
cy cz
ę
stotliwo
ś
ci rezonansowej drga
ń
. Dodatkowo zastosowany
czujnik temperatury pozwala wyeliminowa
ć
zmiany modułu spr
ęż
ysto
ś
ci zwi
ą
zane ze
zmian
ą
temperatury.
Pomiary cz
ę
stotliwo
ś
ci rezonansowej czujnika i temperatury s
ą
wykonywane
okresowo. G
ę
sto
ść
cieczy wyznacza si
ę
korzystaj
ą
c z liniowej zale
ż
no
ś
ci mi
ę
dzy g
ę
sto
ś
ci
ą
,
a cz
ę
stotliwo
ś
ci
ą
rezonansow
ą
i stałymi kalibracyjnymi. Przy u
ż
yciu tych informacji, na
wyj
ś
ciu otrzymywany jest sygnał reprezentuj
ą
cy g
ę
sto
ść
płynu.
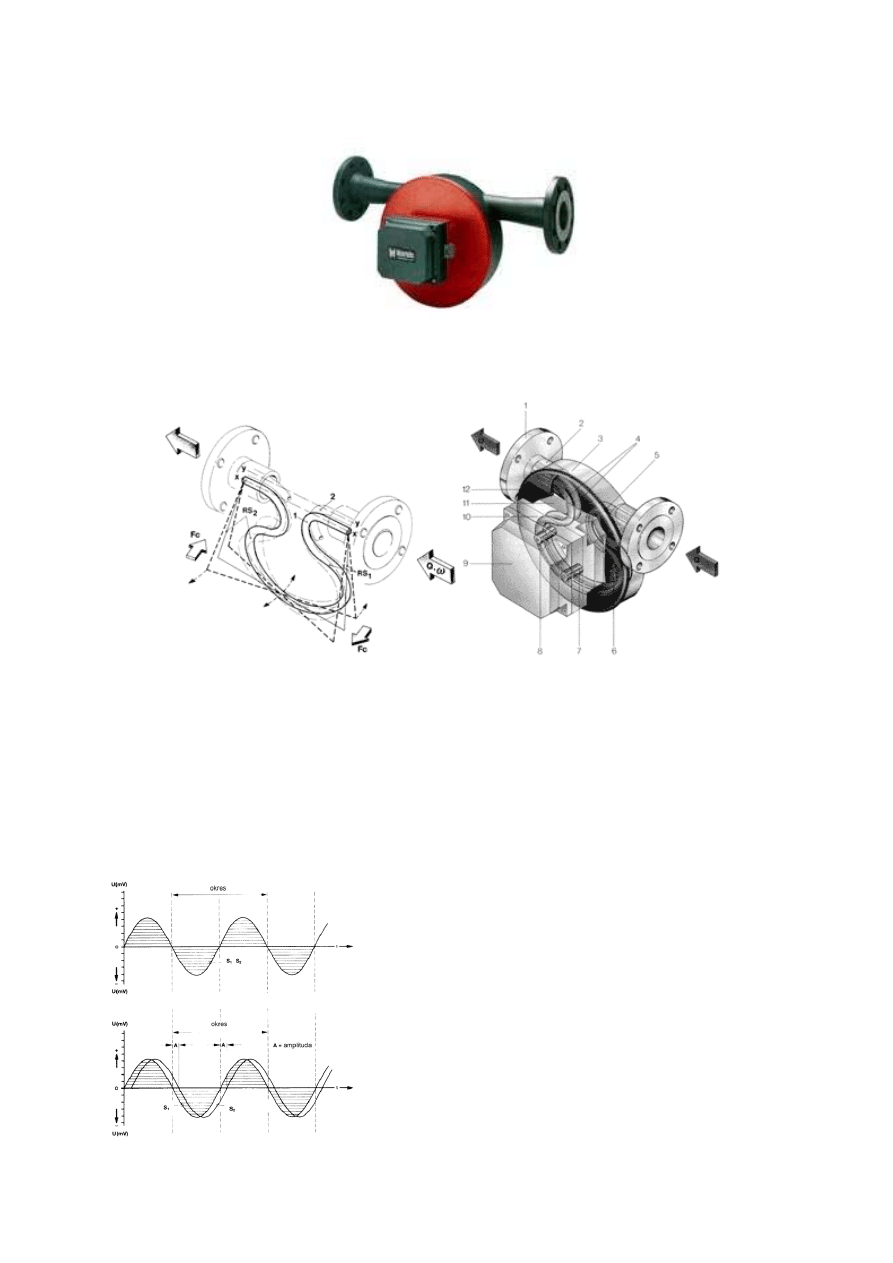
Przepływomierz masowy TM
Zasada działania przepływomierzy masowych TME oparta jest na powstawaniu sił
Coriolisa podczas przepływu medium przez element pomiarowy, którym jest rurka (b
ą
d
ź
dwie) wygi
ę
ta w kształcie litery
Ω
omega.
1, 2 – rurki pomiarowe
RS1, RS2 – czujniki indukcyjne
Q – przepływ
ω
– pr
ę
dko
ść
k
ą
towa
F
C
– siła Coriolisa
1 – przył
ą
cza
2 – elementy wej
ś
cia
3 – obudowa
4 – rurki pomiarowe
5 – czujnik temperatury
6 – cewka indukcyjna RS1
7 – cewka generuj
ą
ca sygnał
8 – cewka indukcyjna RS2
9 – obudowa przetwornika
10 – wewn
ę
trzna obudowa
modułu przetwarzaj
ą
cego
11 – moduł przetwarzaj
ą
cy
12- przykrywka miernika
Na
ś
rodku elementu pomiarowego umieszczona jest cewka generuj
ą
ca sygnał
sinusoidalny, a dwie cewki indukcyjne umieszczone s
ą
po bokach.
Przy braku przepływu cewki indukcyjne RS1, RS2
odbieraj
ą
generowany sygnał zgodny w fazie i o
jednakowej cz
ę
stotliwo
ś
ci. Pojawienie si
ę
przepływu
powoduje,
ż
e powstaj
ą
ce na zakrzywionych fragmentach
elementu
pomiarowego
siły
Coriolisa
powoduj
ą
przesuni
ę
cie w fazie sygnału pochodz
ą
cego od cewek
RS1 i RS2. Przesuni
ę
cie fazowe A jest proporcjonalne
do masy przepływaj
ą
cego medium.
Wskazywany
przepływ
masowy
nie
zale
ż
y
od
przewodno
ś
ci, g
ę
sto
ś
ci, temperatury, ci
ś
nienia i lepko
ś
ci
mediów.
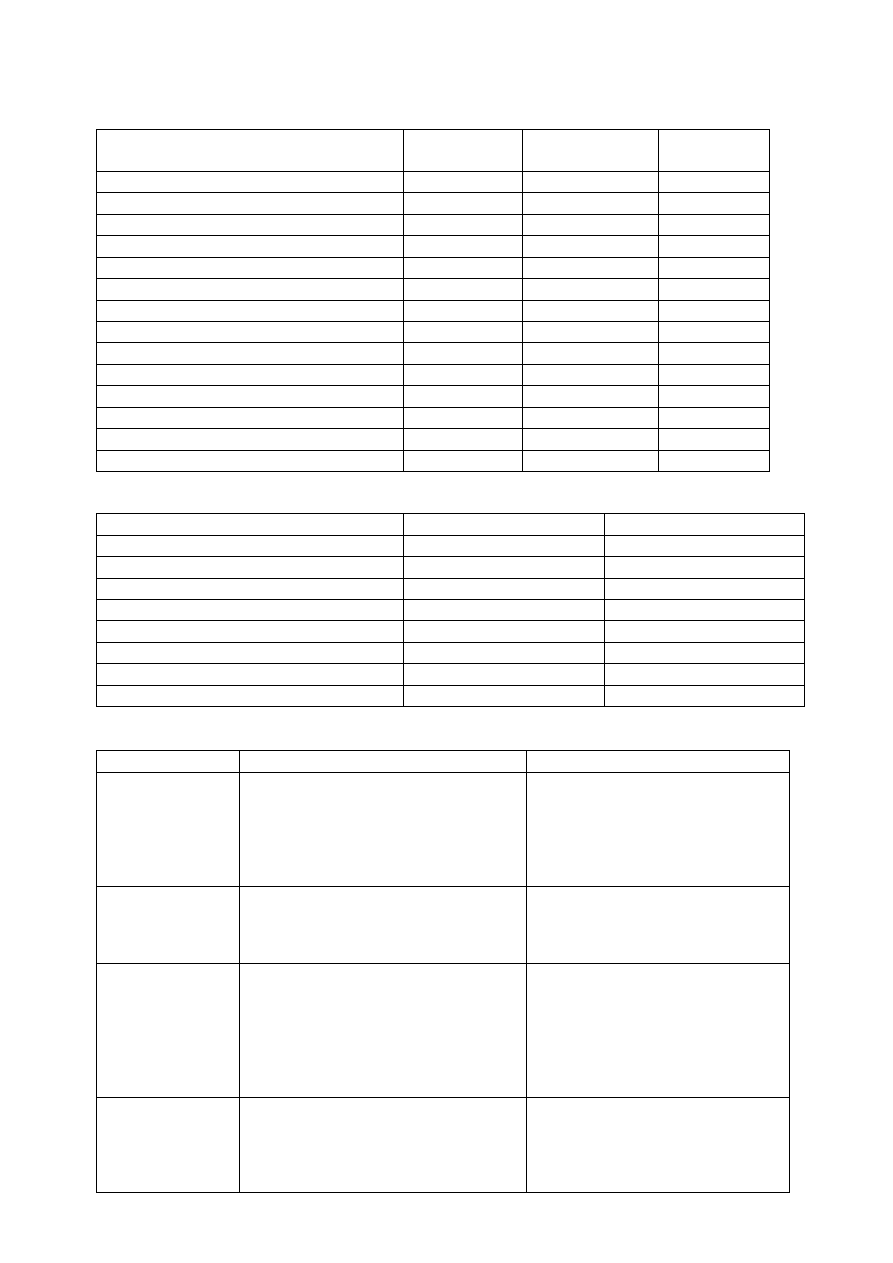
Zestawienie przepływomierzy wg wielko
ś
ci sprzeda
ż
y
Metoda pomiaru
2003
2001
Zmiana
2001-2003
Indukcyjne
1.
1
0
Przepływu masowego
2.
4
+2
Turbinki
3.
3
0
Kryzy pomiarowe
4.
2
-2
Coriolsa
5.
5
0
Komorowe
6.
10
+4
Vortex
7.
7
0
Ultrad
ź
wi
ę
kowe
8.
11
+3
Annubar
9.
8
-1
Rurka Pilota
10.
13
+3
Zw
ęż
ka Venturiego
11.
6
-5
Dysze pomiarowe
12.
12
0
Termiczne
13.
9
-4
Kryzy pier
ś
cieniowe
14.
15
+1
Zasadnicze wła
ś
ciwo
ś
ci i czynniki wpływaj
ą
ce na decyzj
ę
o zakupie
2001
2002
Niezawodno
ść
94%
88%
Dokładno
ść
79
75
Łatwo
ść
kalibracji
86
73
Wykrywanie usterek OnLine
70
69
Niskie koszty posiadania
65
64
Komunikacja cyfrowa
39
48
Łatwo
ść
instalacji
41
48
Nieinwazyjno
ść
pomiaru
36
38
Porównanie aplikacji dla nowoczesnych metod pomiaru nat
ęż
enia przepływu
Metod pomiaru
Sprawdzone aplikacje
Wady
Coriolis
Czyste ciecze i gazy o odpowiednio
dużej prędkości przepływu,
umożliwiającej działanie miernika w
rurach o średnicy 2 cale i mniejszych.
Stosowane gdy wymagane są wysokie
parametry metrologiczne
Przy zastosowaniu do pomiarów
przepływu w rurach o średnicy 4
cale i większych staje się drogi i
niewygodny w obsłudze. Wysoki
koszt zakupu. Dostępne są tańsze
innego rodzaju.
Indukcyjne
Ciecze przewodzące, których działanie
korozyjne nie uszkodzi wyłożenia lub
powłoki elektrod. Przepływająca ciecz
całkowicie wypełnia rurę.
Nie można mierzyć przepływu
węglowodorów i innych płynów
nieprzewodzacych, gazów i par
Ultradźwiękowe
Czyste, płynące bez zawirowań ciecze
lub gazy o znanym profilu prędkości w
przekroju poprzecznym
W celu uzyskania wyższej
dokładności może być potrzebne
użycie miernika wielokanałowego.
Większość mocowanych zaciskowo
na rurociągu ma mniejszą
dokładność niż mierniki stanowiące
segment rurociągu.
Vortex
Czyste, o niskiej lepkości ciecze, gazy
lub pary płynące bez zawirowań ze
ś
rednia lub dużą prędkością.
Trudność pomiaru przepływu
płynów przy małych prędkościach.
Zwykle pewien problem stanowią
wibracje mechaniczne i inne
zakłócenia (hałas).
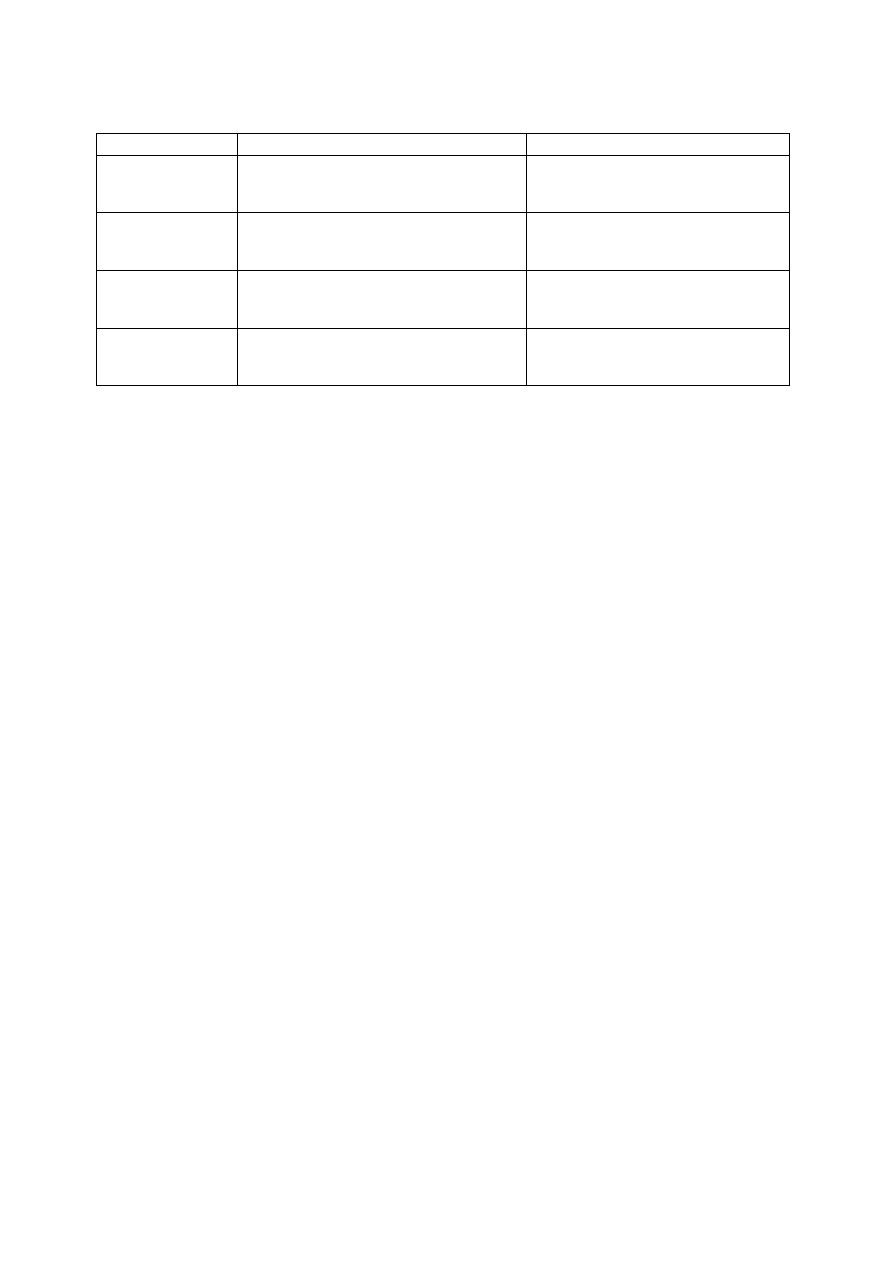
Porównanie aplikacji dla tradycyjnych metod pomiaru nat
ęż
enia przepływu
Metod pomiaru
Sprawdzone aplikacje
Wady
Różnicy ciśnień
Czyste ciecze, pary i gazy, przy niskich i
ś
rednich wymaganiach dokładności
pomiaru.
Powoduje straty ciśnienia. Zwężki
pomiarowe są narażone na
uszkodzenia i zużycie.
Komorowe
Czyste nie agresywne ciecze, ciecze
lepkie i gazy o małym natężeniu
przepływu.
Części ruchome narażone są na
zużycie.
Turbinkowe
Czyste, o ustalonym stanie ciecze i gazy,
o średniej i dużej prędkości przepływu.
Narażone na zużycie są łożyska.
Możliwości pomiaru są ograniczone
przy występowaniu zanieczyszczeń.
Termiczne
Czyste gazy o znanym współczynniku
przejmowania ciepła.
Mała lub średnia dokładność
pomiaru. Ograniczona możliwość
pomiaru przepływu cieczy.
Cena jednego przepływomierza wynosi
ś
rednio 1700 dolarów.

Pomiary momentu obrotowego
Pomiar momentu obrotowego (skr
ę
caj
ą
cego) na wale okr
ę
towym odgrywa niezwykle
istotn
ą
rol
ę
zarówno z punktu widzenia eksploatacji silnika okr
ę
towego jak równie
ż
z punktu
widzenia prowadzenia jego automatycznego sterowania. W chwili obecnej istnieje bardzo
wiele metod pomiaru momentu obrotowego (skr
ę
caj
ą
cego) na wale. Ka
ż
da z tych metod
posiada okre
ś
lone zalety i wady.
Przegląd metod pomiarowych
O wielko
ś
ci momentu obrotowego mo
ż
na wnioskowa
ć
na podstawie pomiaru
parametrów po
ś
rednich charakteryzuj
ą
cych obci
ąż
enie silnika takich jak przemieszczenie
listwy paliwowej, temperatura gazów wylotowych lub w sposób bezpo
ś
redni przez
wykorzystanie czujników momentu (torsjometrów). W zale
ż
no
ś
ci od zasady działania
rozró
ż
nia si
ę
czujniki elektryczne, mechaniczne, hydrauliczne, pneumatyczne i optyczne. W
warunkach eksploatacji statku znalazły zastosowanie przede wszystkim czujniki elektryczne
tzn. pracuj
ą
ce w oparciu o zasad
ę
przekształcania momentu obrotowego w sygnał
elektryczny. Mo
ż
na je podzieli
ć
na pracuj
ą
ce w oparciu o:
•
metody wykorzystuj
ą
ce pomiar k
ą
towego skr
ę
cenia wału ( np torsjometry
fazometryczne firmy Jungner, Mitsui Shipbulding and Enginering Co. Ltd, Furuno,
torsjometry strunowe firmy Maihak)
•
metody oparte na pomiarze deformacji skr
ę
canego wału (torsjometryczne i
magnetospr
ęż
yste)
Informacja z wału o wielko
ś
ci momentu obrotowego mo
ż
e by
ć
przekazywana z
wykorzystaniem pier
ś
cieni
ś
lizgowych lub bezstykowo. Z uwagi na bardzo trudne warunki
eksploatacji torsjometrów na statkach dalszej analizie b
ę
d
ą
podlegały tylko metody
bezstykowe, które s
ą
w stanie zabezpieczy
ć
bezawaryjn
ą
i dokładn
ą
prac
ę
; mo
ż
na je
podzieli
ć
na dwie podgrupy tzn. z indukcyjnym i radiotelemetrycznym sposobem
przekazywania informacji z wiruj
ą
cego wału do przyrz
ą
du pomiarowego. W chwili obecnej
szerokie zastosowanie na statkach znalazły metody indukcyjne.
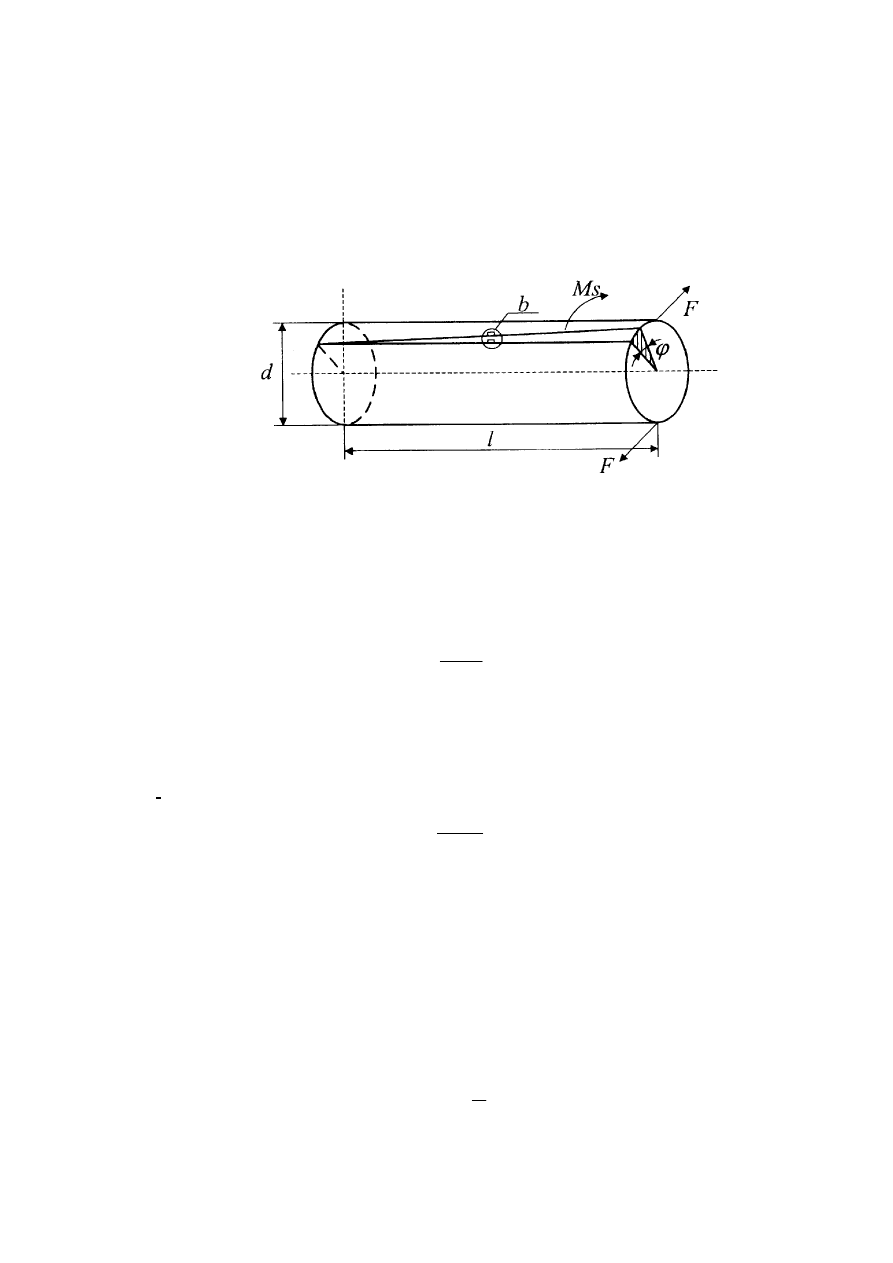
27
Moment obrotowy nale
ż
y do najwa
ż
niejszych wska
ź
ników pracy silnika. Wraz z
pr
ę
dko
ś
ci
ą
obrotow
ą
słu
ż
y do wyznaczania mocy silnika.
Wi
ę
kszo
ść
pomiarów momentu obrotowego b
ą
d
ź
skr
ę
caj
ą
cego (z punktu widzenia
pomiaru mi
ę
dzy oboma przypadkami nie ma wi
ę
kszych ró
ż
nic) opiera si
ę
na okre
ś
leniu
skr
ę
cenia wału na odcinku pomiarowym l o k
ą
t
ϕϕϕϕ
powstałego na skutek działania pary sił F
na pewnym
ramieniu
(rys. 30.).
Rys.30. Schemat czystego skr
ę
cania wału
; d –
ś
rednica wału, l – długo
ść
pomiarowa, F – siła
wytwarzaj
ą
ca moment M
s
,
ϕ
- k
ą
t skr
ę
cenia. Szczegół b został przedstawiony na rysunku 32.
Skr
ę
cenie wału jest skutkiem wła
ś
ciwo
ś
ci materiału, z którego jest on wykonany. Praktycznie
wszystkie znane materiały posiadaj
ą
, przy pewnym poziomie obci
ąż
enia, zdolno
ść
do tzw.
odkształce
ń
spr
ęż
ystych, które ustaj
ą
wraz z ustaniem działania obci
ąż
enia (sił
wywołuj
ą
cych to obci
ąż
enie). Zaobserwowano równie
ż
,
ż
e odkształcenie materiału, a w
rozpatrywanym przypadku skr
ę
cenie wału o kat
φ
, jest proporcjonalne do sił obci
ąż
aj
ą
cych.
gdzie:
G (N/m
2
) – moduł odkształcenia postaciowego (Kirchhoffa), b
ę
d
ą
cy odpowiednikiem modułu
Younga dla skr
ę
cania (dla stali wynosi 8,14
⋅
10
10
Pa),
I
o
(m
4
) – biegunowy moment bezwładno
ś
ci przekroju poprzecznego wału, dla wału pełnego
wynosi:
d (m) –
ś
rednica wału,
M
s
(Nm) – moment skr
ę
caj
ą
cy,
l (m) – odległo
ść
pomiarowa.
Okre
ś
lenie k
ą
ta skr
ę
cenia wału opiera si
ę
o pewne konieczne uproszczenia, które ju
ż
na
wst
ę
pie ograniczaj
ą
dokładno
ść
pomiarów.
K
ą
t
ϕ
jest k
ą
tem
ś
rodkowym powstałym po skr
ę
ceniu wału, a ze wzgl
ę
du na bardzo małe
przemieszczenie k
ą
towe, odległo
ść
∆
l jest zwykle aproksymowana z długo
ś
ci łuku do
długo
ś
ci odcinka – rys.31.
o
s
I
G
l
M
⋅
⋅
=
ϕ
32
4
d
I
o
⋅
=
π
2
2
ϕ
tg
R
l
⋅
=
∆
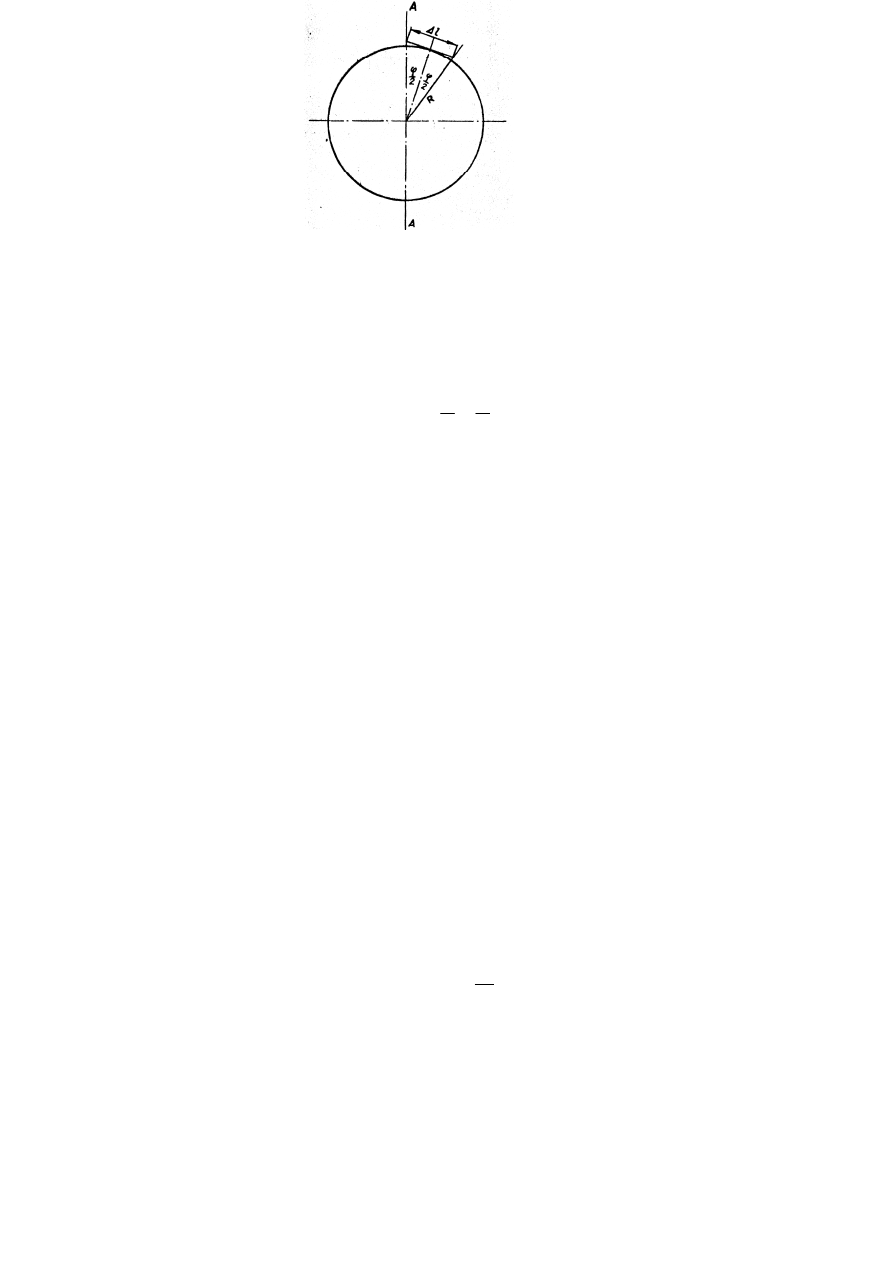
28
Rys.31. Graficzne zobrazowanie uproszcze
ń
geometrycznych stosowanych przy pomiarze
momentu skr
ę
caj
ą
cego metod
ą
skr
ę
cenia wału.
ϕ
- k
ą
t
ś
rodkowy odkształcenia wału,
∆
l –
obwodowe przesuni
ę
cie cz
ą
steczki wału przybli
ż
one do przesuni
ę
cia liniowego
Jednocze
ś
nie, dla małych k
ą
tów, przyj
ę
to uproszczenie przybli
ż
aj
ą
ce warto
ść
tangensa
połowy k
ą
ta
ϕ
do warto
ś
ci połowy k
ą
ta
ϕ
.
gdzie:
R – promie
ń
wału,
∆
l – obwodowe przemieszczenie elementu powierzchni wału w wyniku skr
ę
cenia,
przybli
ż
one do przemieszczenia liniowego,
Bior
ą
c pod uwag
ę
obie zale
ż
no
ś
ci otrzymamy równanie:
Powstała w ten sposób zale
ż
no
ść
umo
ż
liwia praktyczne zastosowanie poni
ż
ej opisanych
metod pomiarowych.
Podstawowym problemem podczas pomiaru momentu jest przesyłanie sygnału
pomiarowego z wiruj
ą
cego wału do przetwornika znajduj
ą
cego si
ę
w spoczynku. Do lat
osiemdziesi
ą
tych powszechnie była stosowana metoda przesyłania informacji w postaci
sygnału elektrycznego za pomoc
ą
pier
ś
cieni
ś
lizgowych. Powodowało to powstawanie wielu
szumów i niedokładno
ś
ci. W warunkach okr
ę
towych pier
ś
cienie szybko si
ę
zanieczyszczały i
zu
ż
ywały. Obecnie stosuje si
ę
tzw. bezstykowe metody przesyłania sygnału, za pomoc
ą
modulacji pola magnetycznego lub drog
ą
radiow
ą
.
Pomiaru momentu obrotowego na statkach jest najcz
ęś
ciej stosowany podczas prób
morskich przez specjalnie wyszkolonych specjalistów za pomoc
ą
przyrz
ą
dów przeno
ś
nych.
Pomiary tensometryczne
W tym pomiarze wykorzystuje si
ę
dwie wła
ś
ciwo
ś
ci materiałów przewodz
ą
cych pr
ą
d
elektryczny, wykorzystywanych przy wytwarzaniu czujników tensometrycznych:
1. zale
ż
no
ść
oporu przewodnika od jego przekroju wyra
ż
on
ą
wzorem:
gdzie:
R – opór elektryczny,
l
o
– długo
ść
przewodnika,
s
o
– pole przekroju przewodnika,
ρ
- opór wła
ś
ciwy (zale
ż
y od materiału, z którego wykonano przewodnik)
o
o
s
l
R
⋅
=
ρ
2
2
ϕ
ϕ
≅
tg
ϕ
⋅
≅
∆
R
l
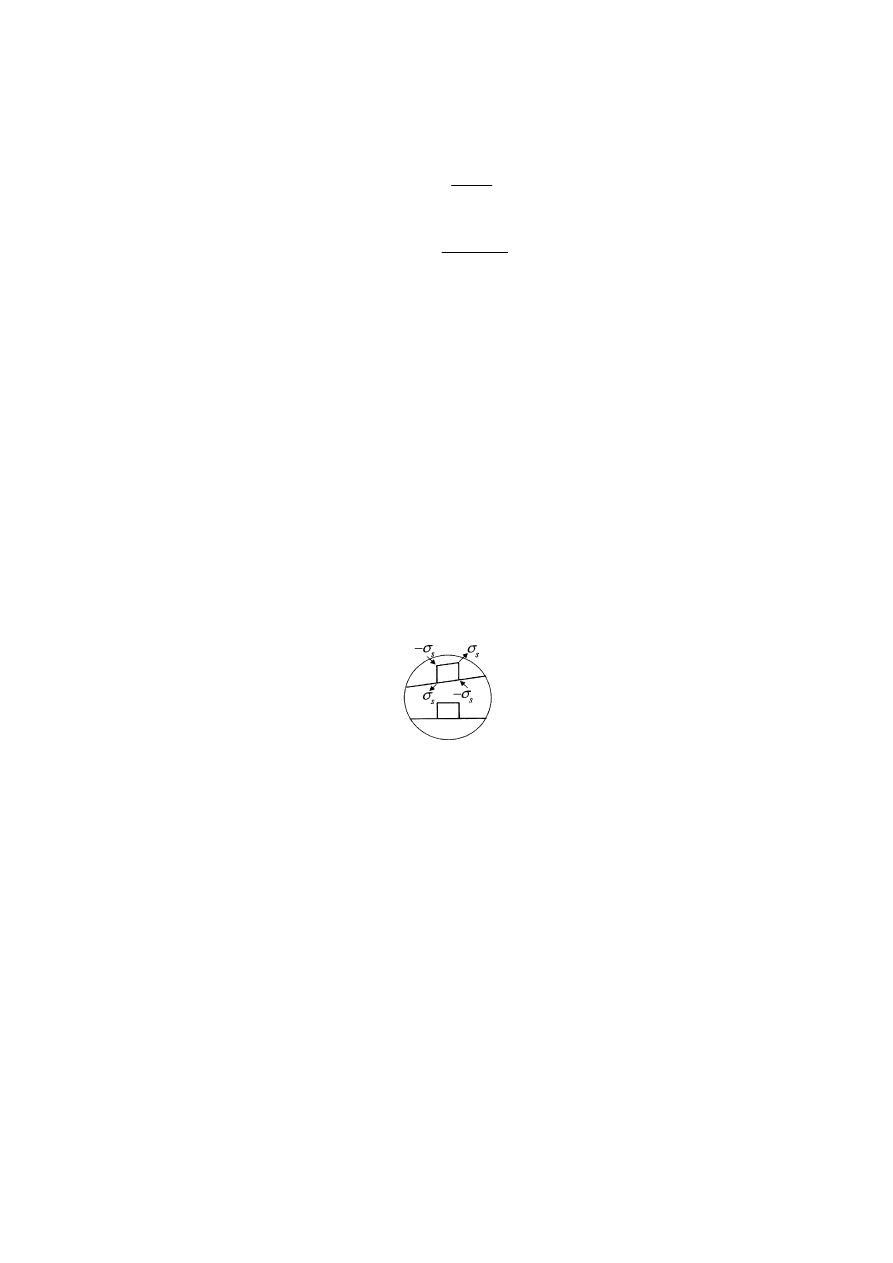
29
2. jednoczesnego wydłu
ż
enia (
∆
l) i przew
ęż
enia (
∆
d) materiału przy obci
ąż
eniu go sił
ą
rozci
ą
gaj
ą
c
ą
F okre
ś
laj
ą
wzory:
gdzie:
l
o
i d
o
– wymiary pocz
ą
tkowe przewodnika,
E – moduł Younga,
ν
- współczynnik Poissona
Zatem zmiana oporu czujnika tensometrycznego zale
ż
y bezpo
ś
rednio od zmiany jego
wymiarów:
Podczas skr
ę
cania pojedynczy element powierzchni wału ulega deformacji (rys.32).
Wyst
ę
puj
ą
wówczas, w obr
ę
bie tego elementu zarówno napr
ęż
enia
ś
ciskaj
ą
ce jak i
rozci
ą
gaj
ą
ce (b
ę
d
ą
ce w rzeczywisto
ś
ci przyczyn
ą
powy
ż
szej deformacji).
Uwzgl
ę
dniaj
ą
c powy
ż
sze zale
ż
no
ś
ci została opracowana metoda, w której na powierzchni
ę
wału nakleja si
ę
element tensometryczny. Taki element wykonywany jest w postaci kilku, do
kilkunastu równoległych odcinków przewodnika. Dodatkowo w celu zniwelowania wpływu
innych obci
ąż
e
ń
ni
ż
styczne, pochodz
ą
ce od momentu obrotowego, czujniki wykonuje si
ę
w
postaci mostka elektrycznego z czterech elementów poło
ż
onych pod k
ą
tem 45
o
do osi
czujnika i tworz
ą
cej wału, zatem równolegle do wyst
ę
puj
ą
cych napr
ęż
e
ń
stycznych.
Rys.32. Mechanizm deformacji powierzchni wału podczas skr
ę
cania
Mocowanie czujnika dokonuje si
ę
za pomoc
ą
specjalnych klejów ceramicznych. Klej
musi charakteryzowa
ć
si
ę
zdolno
ś
ci
ą
do wiernego przenoszenia napr
ęż
e
ń
z wału na
tensometr (nie mo
ż
e by
ć
zbyt elastyczny). Dodatkowo stosowane kleje powinny by
ć
izolatorami elektrycznymi, a jednocze
ś
nie wskazana jest ich dobra przewodno
ść
cieplna, nie
powinny by
ć
higroskopijne. Spoina powinna by
ć
mo
ż
liwie cienka, równomierna i pewna.
Du
ż
ym problemem w pomiarach tensometrycznych momentu jest zjawisko nagrzewania
si
ę
czujnika w wyniku wydzielania si
ę
tzw. ciepła Joule’a. Dochodzi wówczas do znacznego
nieraz zafałszowania wyniku pomiaru (na skutek zmiany oporno
ś
ci czujnika ze zmian
ą
jego
temperatury). Przeciwdziała si
ę
temu stosuj
ą
c obni
ż
one napi
ę
cia zasilania rz
ę
du kilku wolt,
lub zasilanie napi
ę
ciem zmiennym b
ą
d
ź
impulsowym. Zmniejszony jest wtedy znacznie czas
nagrzewania czujnika przy jednoczesnym wydłu
ż
eniu okresu studzenia (w tym celu
po
żą
dana jest dobra przewodno
ść
cieplna podło
ż
a klejowego).
o
o
s
E
l
F
l
⋅
⋅
=
∆
o
o
l
l
d
d
ν
⋅
∆
⋅
=
∆
)
,
(
d
l
f
R
∆
∆
=
∆

30
Rys.33. Przykład pojedynczego czujnika tensometrycznego i zamontowanego mostka
tensometrycznego na wale
W praktyce okr
ę
towej, o ile zastosowany jest na statku pomiar momentu, zwykle
przyrz
ą
d jest ju
ż
odpowiednio zamocowany i wyskalowany, zatem jego regulacja jest
zb
ę
dna. Nale
ż
y jednak pami
ę
ta
ć
o zjawisku płyni
ę
cia czujników tensometrycznych. Objawia
si
ę
ono samoistn
ą
zmian
ą
w czasie punktu zerowego dla zerowego obci
ąż
enia, co sprawia
konieczno
ść
okresowego ich skalowania.
Transmisja sygnału pomiarowego i napi
ę
cia mo
ż
e si
ę
odbywa
ć
za pomoc
ą
pier
ś
cieni
ś
lizgowych i szczotek grafitowych, jednak powoduje to problemy opisane we wst
ę
pie do tego
tematu.
Przykład pomiaru momentu obrotowego na statku m/s WINETA
Warto
ść
momentu obrotowego wyznaczana była przez pomiar napr
ęż
e
ń
pojawiaj
ą
cych
si
ę
przy skr
ę
caniu wału
ś
rubowego. Zrealizowano to przy pomocy tensometrów
elektrooporowych typu ES 1763 o rezystancji 600 Ohm.
Układ pomiarowy przedstawiony jest na rys.3
W skład układu wchodz
ą
:
1. tensometry naklejone na wale
ś
rubowym
2. przetwornik zmian rezystancji mostka na cz
ę
stotliwo
ść
3. zasilacz prostownika
4. uzwojenia transformatora wiruj
ą
cego na wale (zasilaj
ą
ce i sygnału mierzonego)
5. uzwojenia stałe transformatora (przekazuj
ą
ce zasilanie i odbieraj
ą
ce sygnał
mierzony)
6. panel przetwornika zamieniaj
ą
cy cz
ę
stotliwo
ść
na napi
ę
cie
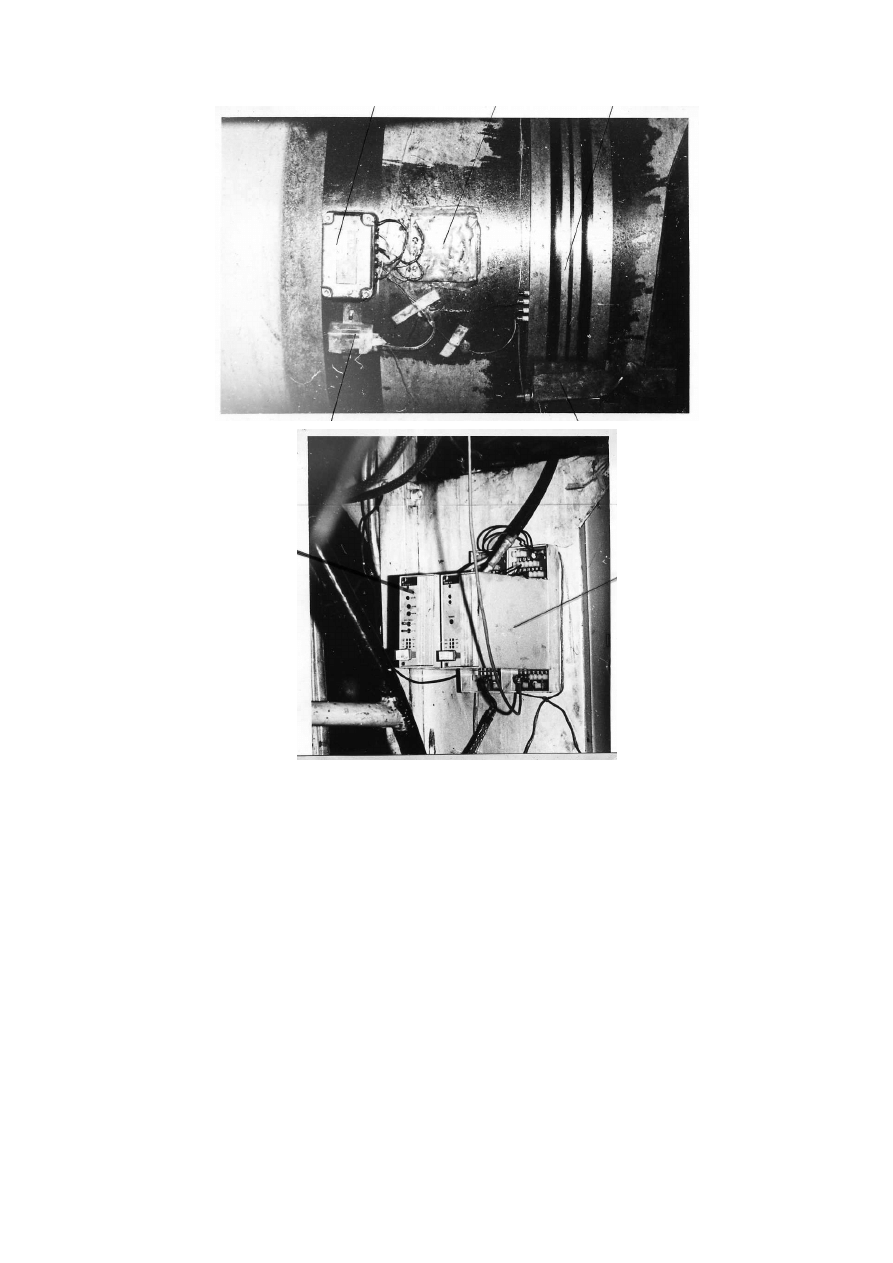
31
Rys. Schemat blokowy i zdj
ę
cia układu pomiarowego momentu obrotowego
Zmiany rezystancji mostka tensometrycznego steruj
ą
cz
ę
stotliwo
ś
ci
ą
generatora (4 – 8)
kHz, nast
ę
pnie sygnał cz
ę
stotliwo
ś
ciowy przekazywany jest do uzwojenia transformatora
wiruj
ą
cego na wale
ś
rubowym i dalej na drodze indukcji przekazywany jest do uzwojenia
wtórnego umieszczonego pomi
ę
dzy odpowiednio ukształtowanymi nabiegunnikami w pobli
ż
u
obracaj
ą
cego si
ę
wału. Sygnał zmiany cz
ę
stotliwo
ś
ci proporcjonalny do warto
ś
ci momentu
obrotowego zostaje przetworzony na napi
ę
cie stałe z zakresu (0 – 10)V i podany poprzez
przetwornik A/C do komputera wyznaczaj
ą
cego nastawy optymalne.
Tensometryczny pomiar momentu obrotowego firmy Philips został zastosowany na
stanowisku hamownianym silnika firmy Sulzer Al 20/24 w laboratorium siłowni okrętowych
AM w Szczecinie.
Metoda optoelektroniczna
Skr
ę
cenie wału na odcinku pomiarowym L jest przenoszone na dwie tarcze na nim
zamocowane, w których na obwodzie s
ą
umieszczone wyci
ę
cia b
ą
d
ź
rysy na
prze
ź
roczystym tle. Rozkład rys na obu tarczach jest równomierny i s
ą
one tak ustawione
wzgl
ę
dem siebie, aby patrz
ą
c wzdłu
ż
osi wału były widoczne na przemian rysy z jednej
tarczy i z drugiej tarczy – rys. 34.
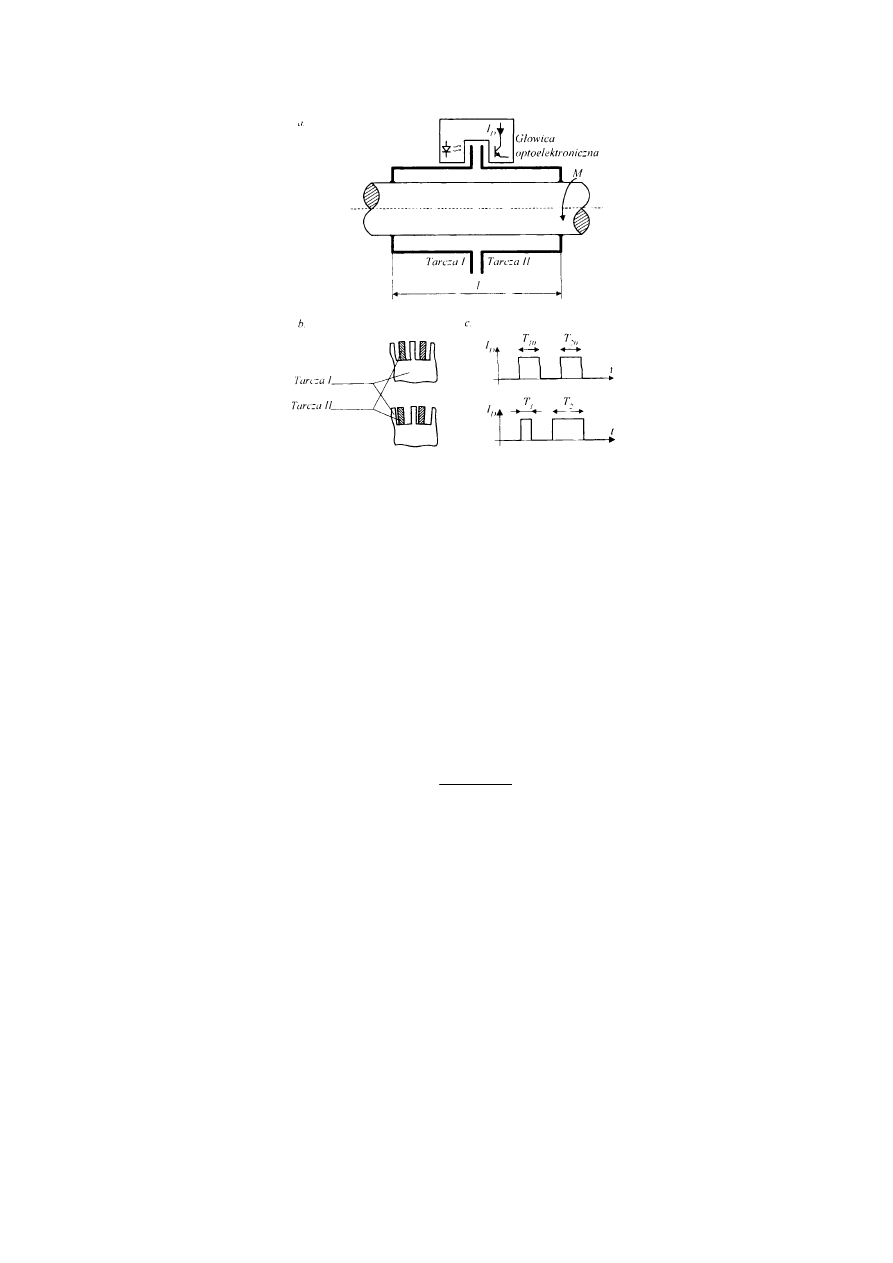
32
Rys. 34. Optoelektroniczna metoda pomiaru momentu obrotowego; a) rozmieszczenie
tarcz z
ę
batych na wale, b) poło
ż
enie z
ę
bów tarczy przy zerowym momencie obrotowym i
ró
ż
nym od zera, c) przebieg pr
ą
du wyj
ś
ciowego detektora dla zerowego momentu
obrotowego i ró
ż
nego od zera
Poza wiruj
ą
cym wałem zamocowany jest układ optyczny składaj
ą
cy si
ę
z diody
nadawczej (przewa
ż
nie pracuj
ą
cej w podczerwieni) i detektora emitowanego przez diod
ę
ś
wiatła.
Dla nieobci
ąż
onego wału pomi
ę
dzy okresami przechodzenia przez wi
ą
zk
ę
ś
wiatła
poszczególnych rys wyst
ę
puj
ą
równomierne odst
ę
py czasu, gdy detektor jest wzbudzony.
Powstanie obci
ąż
enia wału powoduje jego skr
ę
cenie i w efekcie przemieszczenie si
ę
wzajemne rys w taki sposób,
ż
e w obr
ę
bie jednej rysy szczelina znajduj
ą
ca si
ę
z przodu w
stosunku do kierunku obrotu wału zmniejsza si
ę
, za
ś
b
ę
d
ą
ca z tyłu zwi
ę
ksza si
ę
. W efekcie
pojawia si
ę
ró
ż
nica w czasie wzbudzenia detektora b
ę
d
ą
ca odpowiednikiem k
ą
ta skr
ę
cenia
wału. Warto
ść
momentu obrotowego mo
ż
na wyznaczy
ć
z zale
ż
no
ś
ci:
n
T
T
k
M
)
(
2
1
−
=
gdzie: k – współczynnik b
ę
d
ą
cy funkcj
ą
parametrów konstrukcyjnych wału oraz tarcz, n –
pr
ę
dko
ść
obrotowa wału, T
1
,T
2
– czasy trwania impulsów pr
ą
du I
D
Jest to do
ść
nowoczesny sposób pomiaru stosunkowo prosty i tani. Dokładno
ść
pomiaru
zale
ż
y od dokładno
ś
ci wykonania i osadzenia tarczy pomiarowych oraz rozdzielczo
ś
ci układu
optycznego; niedokładno
ść
pomiaru wynosi 2...3%. Du
żą
zalet
ą
jest wyeliminowanie
wiruj
ą
cych elementów elektronicznego układu pomiarowego, a zastosowanie optycznego
odczytu obni
ż
a znacznie poziom szumów.
Metoda akustyczna
Metod
ę
akustyczn
ą
(drganiow
ą
) pomiaru momentu zastosowano przy konstrukcji
torsjometru Maihaka.
Układ pomiarowy składa si
ę
z dwóch podzespołów: cz
ęść
pomiarowa zamocowana na
wale wraz z zespołem pier
ś
cieni
ś
lizgowych, oraz cz
ęść
porównywania i odczytu sygnału.
Na wale zamocowane s
ą
dwie obr
ę
cze w odległo
ś
ci pomiarowej L. Mi
ę
dzy nimi s
ą
rozpi
ę
te
dwie struny wst
ę
pnie napi
ę
te. S
ą
one zamocowane w taki sposób, aby podczas skr
ę
cania
wału napi
ę
cie jednej ze strun wzrastało, za
ś
drugiej malało (u
ż
ywa si
ę
okre
ś
lenia „struna
ś
ciskana”, co nie jest prawd
ą
, ale obrazuje proces skracania struny). Stosowanie dwóch
33
strun ma na celu eliminacj
ę
innych odkształce
ń
wału ni
ż
pochodz
ą
ce od momentu
skr
ę
caj
ą
cego.
Nad strunami s
ą
umieszczone po dwa elektromagnesy, z których jeden generuje pole
magnetyczne. Struna pełni rol
ę
zwory, która zamyka obieg magnetowodu przekazuj
ą
c
strumie
ń
magnetyczny do drugiego elektromagnesu. Poniewa
ż
struna jest wprowadzona w
ruch drgaj
ą
cy, zatem do cewki odbiorczej dociera pole magnetyczne zmodulowane do
cz
ę
sto
ś
ci drga
ń
struny – generuje, zatem w niej sił
ę
elektromotoryczn
ą
o tej samej
cz
ę
stotliwo
ś
ci. W miar
ę
jak w wyniku działaj
ą
cych napr
ęż
e
ń
długo
ść
struny ulega zmianie, to
zmienia si
ę
te
ż
jej cz
ę
stotliwo
ść
drga
ń
własnych, która zale
ż
y wył
ą
cznie od długo
ś
ci struny:
gdzie:
l – długo
ść
struny,
F – siła rozci
ą
gaj
ą
ca strun
ę
,
s – pole przekroju struny,
ρ
- g
ę
sto
ść
materiału struny.
Sygnał elektryczny z cewki odbiorczej jest przesyłany poprzez pier
ś
cienie
ś
lizgowe do
układu porównawczego i po wzmocnieniu jest obrazowany na lampie oscyloskopowej.
Jednocze
ś
nie z pomiarem momentu na wale obsługa stanowiska pomiarowego dokonuje
strojenia analogicznego zespołu pomiarowego za pomoc
ą
ś
ruby mikrometrycznej
znajduj
ą
cej si
ę
w zestawie. Sygnał porównawczy jest równie
ż
podawany na wej
ś
cie lampy
oscyloskopowej, co skutkuje pojawieniem si
ę
na ekranie zwielokrotnionych p
ę
tli eliptycznych.
Zrównanie cz
ę
stotliwo
ś
ci wzorcowej z sygnałem pochodz
ą
cym z wału powoduje
znieruchomienie obrazu na lampie i powstanie pojedynczej elipsy (mo
ż
e to by
ć
równie
ż
okr
ą
g lub odcinek). Nale
ż
y wówczas odczyta
ć
warto
ść
na skali
ś
ruby mikrometrycznej, która
jest proporcjonalna do długo
ś
ci struny po wydłu
ż
eniu.
Pomiar momentu na wale polega na wycechowaniu wst
ę
pnego napi
ę
cia struny, gdy wał
jest jeszcze w spoczynku, nast
ę
pnie nale
ż
y dokona
ć
pomiaru dla obci
ąż
enia wału
momentem obrotowym. Ró
ż
nice we wskazaniach przyrz
ą
du obrazuj
ą
wydłu
ż
enie wzgl
ę
dne
struny (proporcjonalne do działaj
ą
cego momentu). Wynik uzyskuje si
ę
poprzez obliczenie
momentu z zale
ż
no
ś
ci:
gdzie:
C – stała cechowania czujnika,
∆
S – ró
ż
nica odczytów: zerowego i dla wału obci
ąż
onego.
W celu okre
ś
lenia mocy układu wystarczy okre
ś
li
ć
pr
ę
dko
ść
obrotow
ą
, przy której został
zmierzony moment obrotowy i skorzysta
ć
z odpowiedniej zale
ż
no
ś
ci.
N = 2
π
M n
Torsjometr Maihaka, w wykonaniu wy
ż
ej opisanym, jest przyrz
ą
dem dostatecznie
dokładnym (bł
ą
d poni
ż
ej 2%), by jednorazowo okre
ś
li
ć
parametry układu nap
ę
dowego w
pewnym przedziale czasu (np. 1 minuty) u
ś
redniaj
ą
c uzyskany wynik. Nie nadaje si
ę
natomiast do ci
ą
głych pomiarów wielko
ś
ci chwilowych. Dodatkowo wymaga du
ż
ej wprawy
przy odczytywaniu wyników z lampy, co mo
ż
e powodowa
ć
znaczny bł
ą
d pomiaru.
Współcze
ś
nie stosowane zestawy pomiarowe (wykorzystywane m. in. przez Stoczni
ę
Szczeci
ń
sk
ą
S.A.) wyposa
ż
one s
ą
w cyfrowe układy obliczeniowe, które znacznie
upraszczaj
ą
procedur
ę
przygotowania wyników pomiaru. Układ porównawczy działa
ρ
⋅
⋅
=
s
F
l
f
2
1
l
R
I
G
S
C
M
o
⋅
⋅
⋅
∆
⋅
=

34
wówczas automatycznie z pomini
ę
ciem lampy oscyloskopowej i zawodnego odczytu wyniku
przez człowieka. Mo
ż
liwe jest wówczas zastosowanie ci
ą
głego odczytu warto
ś
ci mierzonej i
tworzenie tzw. histogramów znacznie zwi
ę
kszaj
ą
cych mo
ż
liwo
ś
ci diagnostyczne.
Przyrz
ą
dy do pomiaru momentu obrotowego (zwane torsjometrami) nie s
ą
powszechnie
stosowane na statkach, co utrudnia okre
ś
lenie mocy u
ż
ytecznej nap
ę
dów głównych. Taka
sytuacja powoduje,
ż
e obci
ąż
enie silnika okre
ś
la si
ę
za pomoc
ą
parametrów po
ś
rednich, jak:
dawka paliwa podawana do silnika (
przemieszczenie listwy paliwowej regulatora
pr
ę
dko
ś
ci obrotowej
), temperatura spalin, pr
ę
dko
ść
obrotowa turbospr
ęż
arek, pr
ę
dko
ść
statku, co jest mało dokładne i mo
ż
e prowadzi
ć
do przeci
ąż
enia silnika momentem
obrotowym zwłaszcza przy małych pr
ę
dko
ś
ciach obrotowych.
Mała powszechno
ść
torsjometrów jest spowodowana nie tylko stosunkowo wysokim
kosztem zakupu, ale przede wszystkim skomplikowan
ą
obsług
ą
i trudno
ś
ciami w eksploatacji
(potrzeba cz
ę
stego skalowania ze wzgl
ę
du na przesuni
ę
cia charakterystyki głównie punktu
zerowego).
Wyszukiwarka
Podobne podstrony:
Czujniki i przetworniki lepkości
Badanie czujnikow i przetwornik Nieznany
Ściąga czujniki, PWR, 7 semestr, Czujniki Przetworniki
czujniki i przetworniki new1
Wyznaczanie charakterystyk statycznych czujników światła, sprawozdania PWR, czujniki i przetworniki
Badanie czujników i przetworników przemysłowych
16 Badanie czujników i przetworników przemysłowych
Czujnik przetwornika magnetycznego na wale korbowym
Wykł ME Czujniki przetw 2
sprawozdanie badanie czujników i przetworników ciśnienia
4 Podstawy Metrologii przetworniki i czujniki
7 Przetworniki i czujniki pomiarowe
więcej podobnych podstron