
Przetworniki / czujniki
pomiarowe
PRZETWORNIKI ELEKTRYCZNE
Tor przetwarzania (łańcuch pomiarowy) - ciąg elementów
funkcjonalnych przekazujących informacje, znajdujących się między
obiektem a urządzeniem odbiorczym (wskaźnikiem, sterownikiem).
W zależności od charakteru zmian sygnałów pomiarowych rozróżnia
się przetwarzanie: 1) wielkości - zmianie ulega wielkość
zawierająca informację:
- ze
zmianą rodzaju energii (np. z mechanicznej na elektryczną)
- bez zmiany rodzaju energii (np. zmiana napięcia na prąd
elektr.)
2) wartości (skali) - zmianie ulega wartość cechy
tego samego sygnału (np.
zmiana amplitudy, szerokości
impulsu, itp.)
3) informacji - zmianie ulega cecha
sygnału (np. z analogowego na dyskretny)
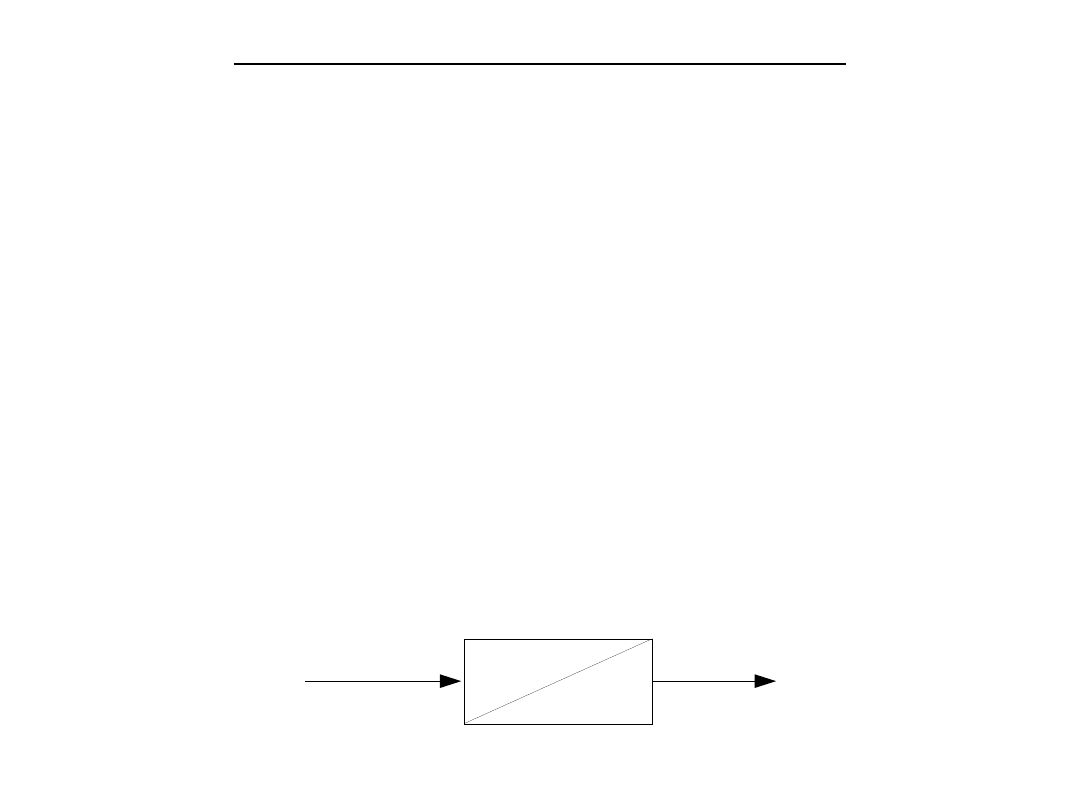
x
y
X
Y
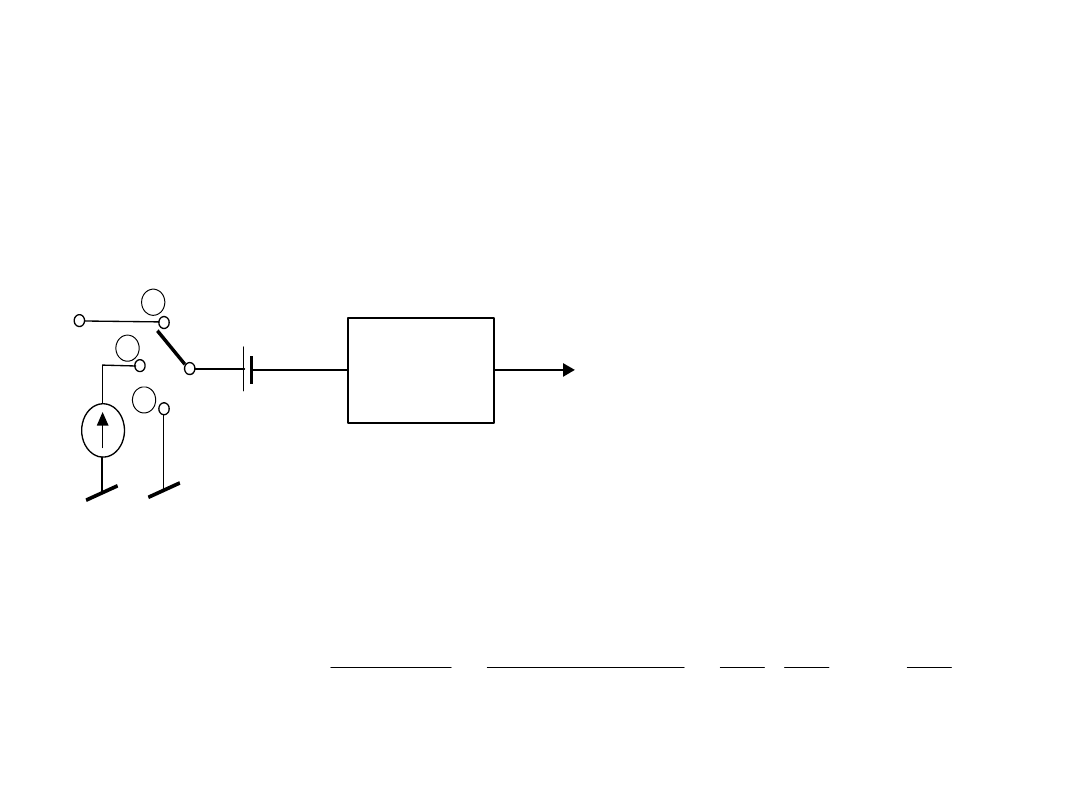
Symbol graficzny przetwornika pomiarowego
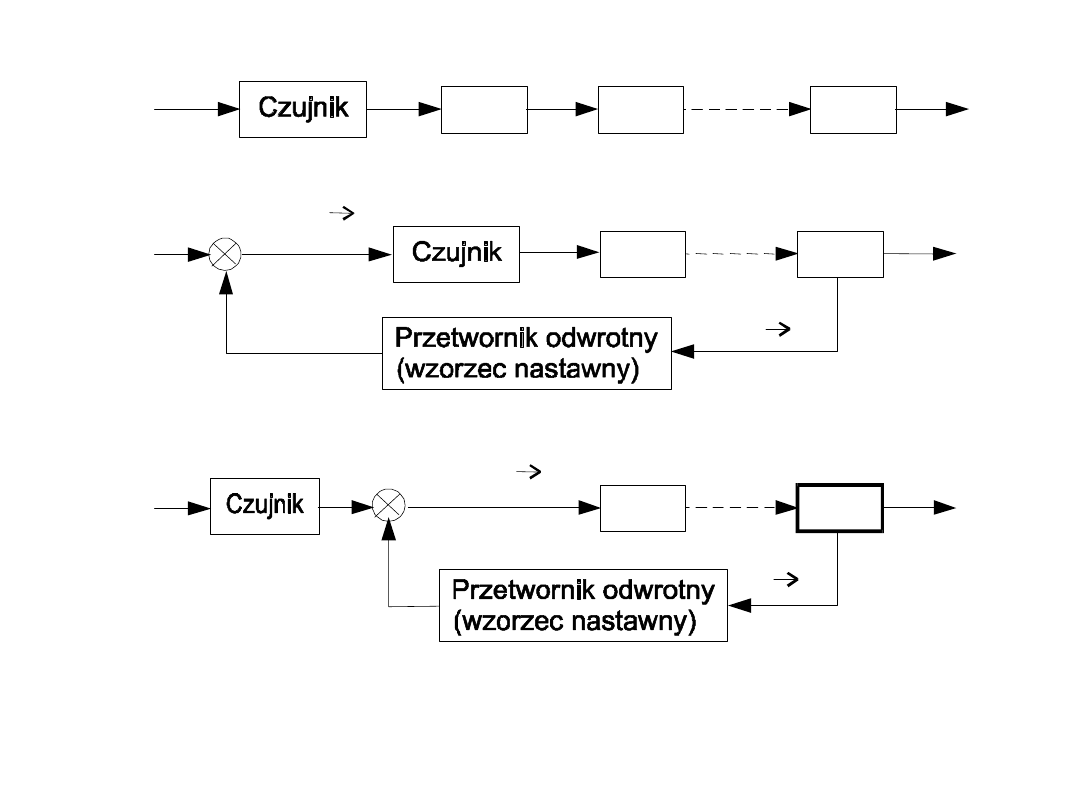
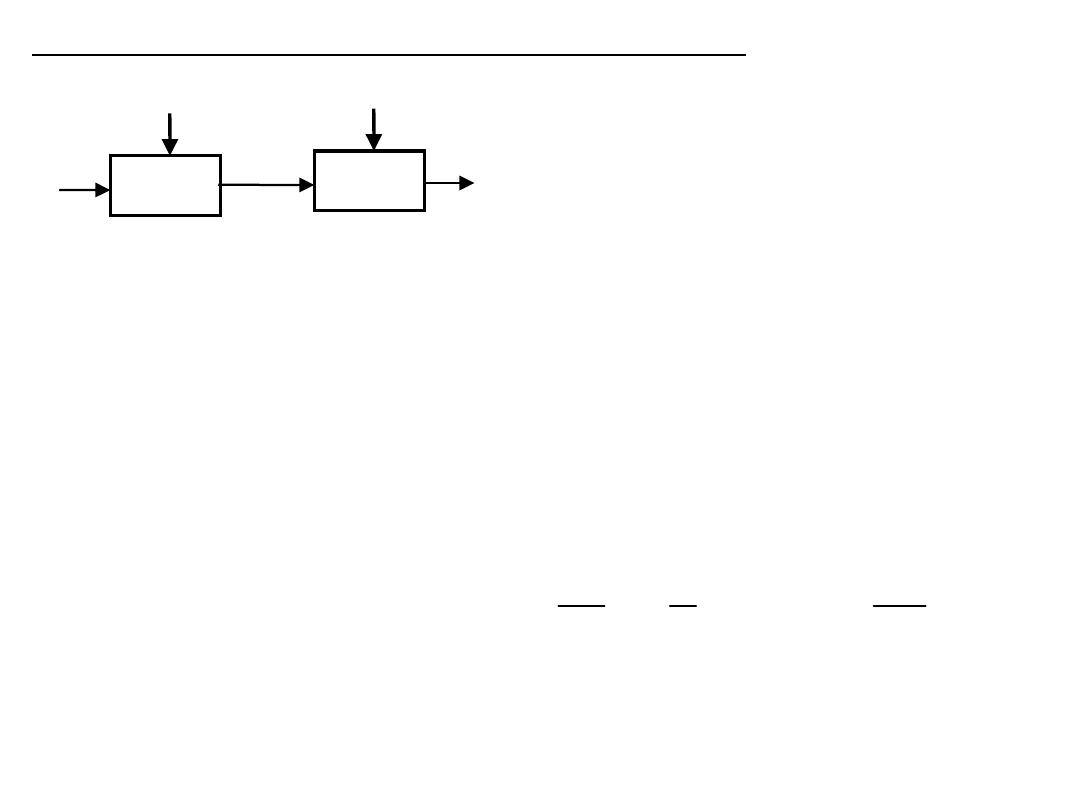
Schematy strukturalne torów przetwarzania: a.) w układzie
otwartym, b.) w układzie zamkniętym typu kompensacyjnego, c.) w
układzie zamkniętym typu komparacyjnego.
x`
x
P
1
P
n
x`-
0
x`
wz
x`
wz
y
0
y`
P
1
P
2
P
n
x
x
1
x
2
x
n
y
a)
x
P
1
P
n
x -
0
x
wz
x
wz
y
0
y`
b)
c)

Czujniki pomiarowe
Podział czujników:
a) w zależności od źródła energii
- generacyjne (termoelektr., fotoel., elktrodyn., elektrochem., itp.)
- parametryczne (zmiana param. RLC)
b) w zależności od charakteru sygnału wyjściowego
- analogowe (zwykle proporcjonalne)
- cyfrowe (w tym kodowe, dwustanowe t.j. termostaty, wył. krańcowe,
itp.)
c) w zależności od mierzonego
d) w zależności od wykorzystywa-
parametru
wanego zjawiska
- temperatury
- indukcyjnościowe
- ciśnienia
- pojemnościowe
- przemieszczeń
- rezystancyjne
- prędkości (obrotowej)
- termo(foto)elektryczne
- natężenia pola
- piezoelektryczne
- promieniowania
- optyczne
- przepływu
- ultradźwiękowe
- stężenia roztworów (pH)
- elektrochemiczne
- itp.
- itp.
e) wg innych kryteriów jak np.: szczelności (IP), odporności środowiskowej
(np. do kwasu, bentonitu,...), warunków mechanicznych pracy
(drgania, wibracje, udary,...), kosztów (zakupu, eksploatacji,
serwisu,..), i in.
Czujnik pomiarowy –
zamienia mierzoną wartość wielkości fizycznej na
łatwy do
obróbki i przesyłu sygnał elektryczny
Parametry statyczne czujnika:
Zakres pomiarowy – określony przez
gdy
to zakres =
W zakresie pomiarowym czujnik powinien utrzymać parametry (błędy)
deklarowane
przez producenta. W zakresie stosowania czujnik powinien działać bez
trwałego
uszkodzenia (ale może mieć zwiększone błędy).
Czułość – nachylenie charakterystyki) w punkcie pracy
Dla przetwornika liniowego:
Stała pomiarowa –
dla charakterystyki liniowej
gdzie: stała przetwarzania
C = 1/S
min
max
X
X
0
min
X
max
X
dX
X
dF
dX
dY
S
)
(
X
S
Y
Y
C
Y
S
X
1
Selektywność
–
zdolność „rozróżniania” wielkości mierzonej od podobnych
do niej
wielkości wpływających (np. czujnik metanu jest również czuły na inne
gazy ale w
różnym stopniu).
Można zwiększyć selektywność przez zastosowanie matrycy
czujników
nieselektywnych o różnej czułości na różne wielkości mierzone (i
wpływające).
Liniowość (nieliniowość)
–
stosowane są różne opisy błędu od
nieliniowości
- błąd od nieliniowości musi być znany dla przeprowadzenia linearyzacji
- jeśli błąd od nielin. jest niewielki to traktuje się go często jako błąd
przypadkowy
dla przypadkowej wartości mierzonej.
Powtarzalność
–
określa zakres, w którym mieszczą się charakterystyki
wszystkich
czujników tego samego typu (jeden czujnik można wzorcować lecz dla
wielu tego
samego typu występuje losowość charakterystyki wynikająca np. z
niepowtarzalności
warunków produkcji).
Histereza
–
wynika z różnic działania czujnika przy wzroście i spadku
wielkości
mierzonej (pochodzi od tarcia, luzów mechanicznych, histerezy
magnetycznej, inercji
termicznej, itp.)
Charakterystyki statyczne przetworników
Charakterystyka statyczna:
gdzie: Y - wartość wielkości wyjściowej, X - wartość wielkości wejściowej
2 0
mA
0
Y
X
1 0 0 %
a )
Y
X
1 0 0 %
1 0 V
- 10 V
0 %
b )
2 0
mA
0
Y
X
1 0 0 %
4
c )
0
Y
X
1 0 0 %
1 0 V
d )
2 0
mA
Y
X
1 0 0 %
e )
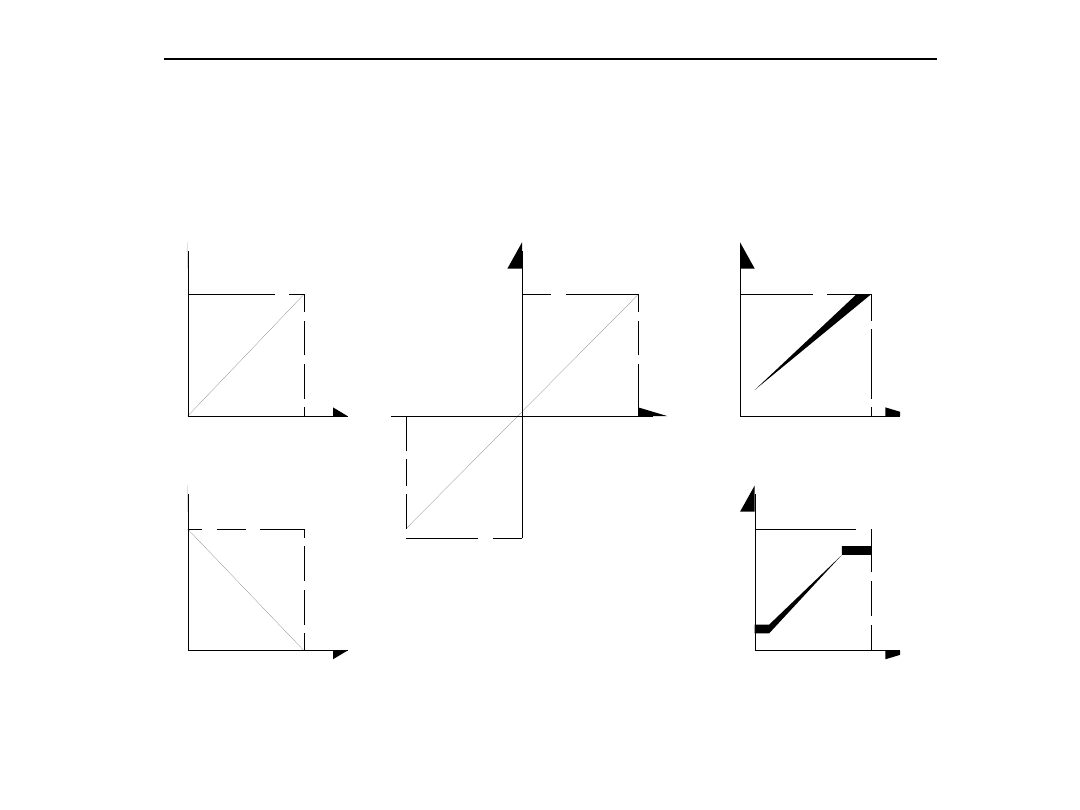
Typowe charakterystyki przetworników pomiarowych: a.) liniowa
naturalna, b.) liniowa dwubiegunowa, c.) liniowa z przesunięciem, d.)
liniowa zanegowana, e.) liniowa z ograniczeniem sygnału wejściowego
i/lub wyjściowego
)
(X
F
Y

Zunifikowane sygnały wyjściowe przetworników przemysłowych:
- prądowe : 0...5mA ; 4...20mA ; 0...20mA ; -5...5mA ;
-20...20mA
- napięciowe : 0...5V ; 0...10V ; -5...5V ; -10...10V.
- wyjścia 2-stanowe (prądowe lub napięciowe) w w/w
standardach
- wyjścia 2-stanowe przekaźnikowe
Moc wejściowa możliwie mała dla wejść prądowych
impedancja Z
wej
mała;
dla wejść napięciowych impedancja Z
wej
duża.
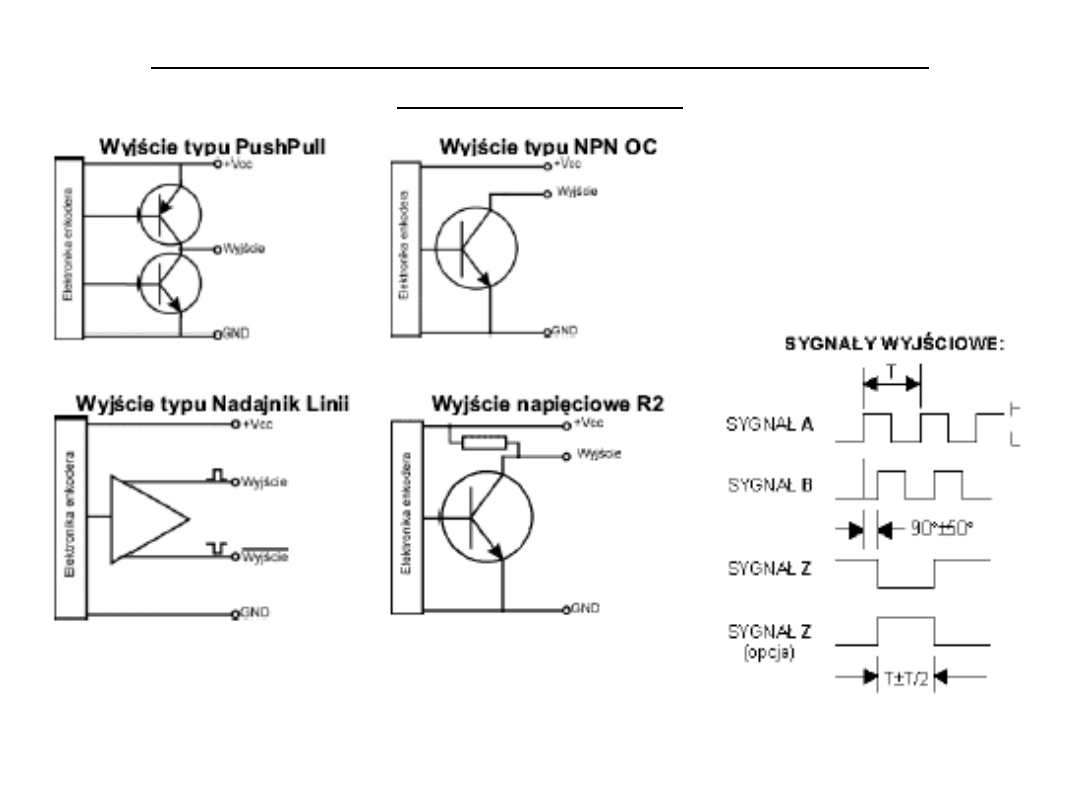
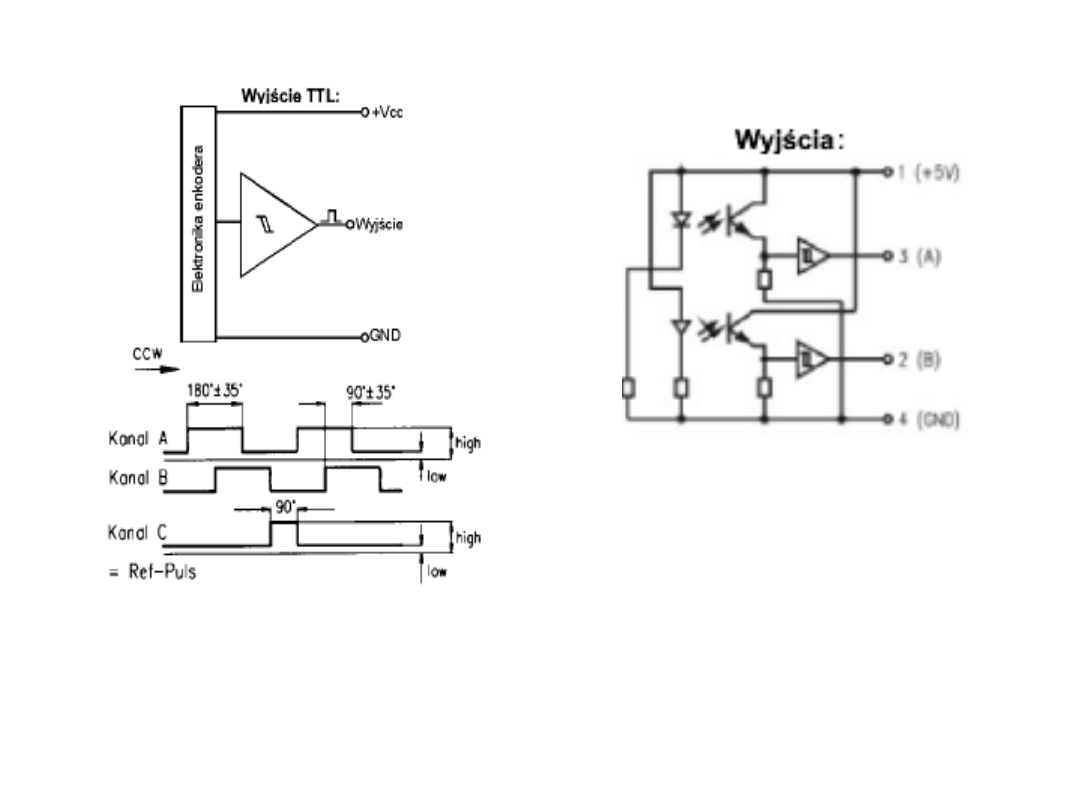
Rodzaje wyjść 2-stanowych pzetworników
przemysłowych
Własności statyczne przetworników
Błąd przetwarzania podawany jako:
- klasa przetwarzania (największa wartość dopuszczalnego
błędu bezwzględnego
odniesiona do zakresu sygnału wejściowego)
- dwie składowe błędu (jedna odniesiona do aktualnej
wartości wielkości
mierzonej, druga do zakresu sygnału wejściowego)
np
.
(0,1
w.m. + 0,05U
N
)
Składowe błędu przetwarzania:
- błędy addytywne (bł. zera)
- błędy multiplikatywne (bł. skali)
- błąd nieliniowości
- błąd dyskretyzacji (dla przetw. cyfrowych)
- błąd histerezy
Błąd nieliniowości:
- (różnie opisywany)
0
Y
X
1 0 0 %
1 0 0 %
a )
0
Y
X
1 0 0 %
1 0 0 %
b )
0
Y
X
1 0 0 %
1 0 0 %
c )
0
Y
X
1 0 0 %
1 0 0 %
d )
lma x
lma x
lma x
lma x
Błędy
nieliniowości
Cztery metody opisu nieliniowości charakterystyki. a.) prosta
najmniejszych kwadratów, b.) prosta najmniejszych kwadratów
przechodząca przez zero, c.) prosta przechodząca przez punkty
końcowe, d.) charakterystyka teoretyczna
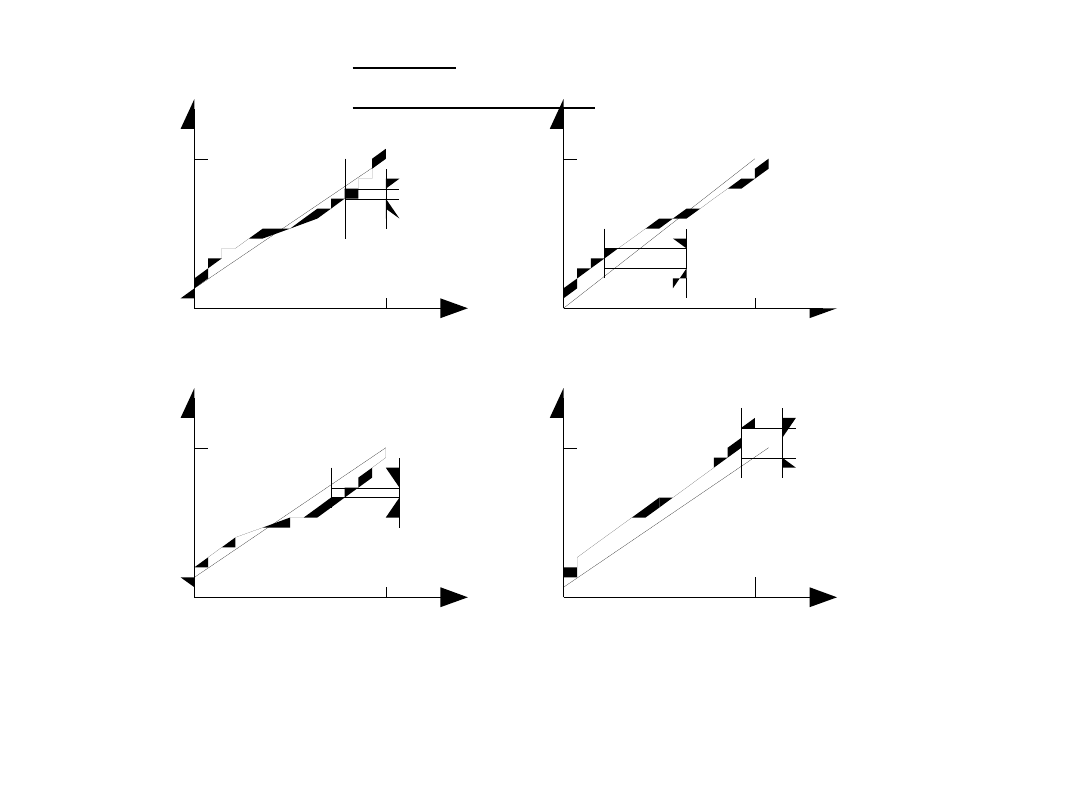
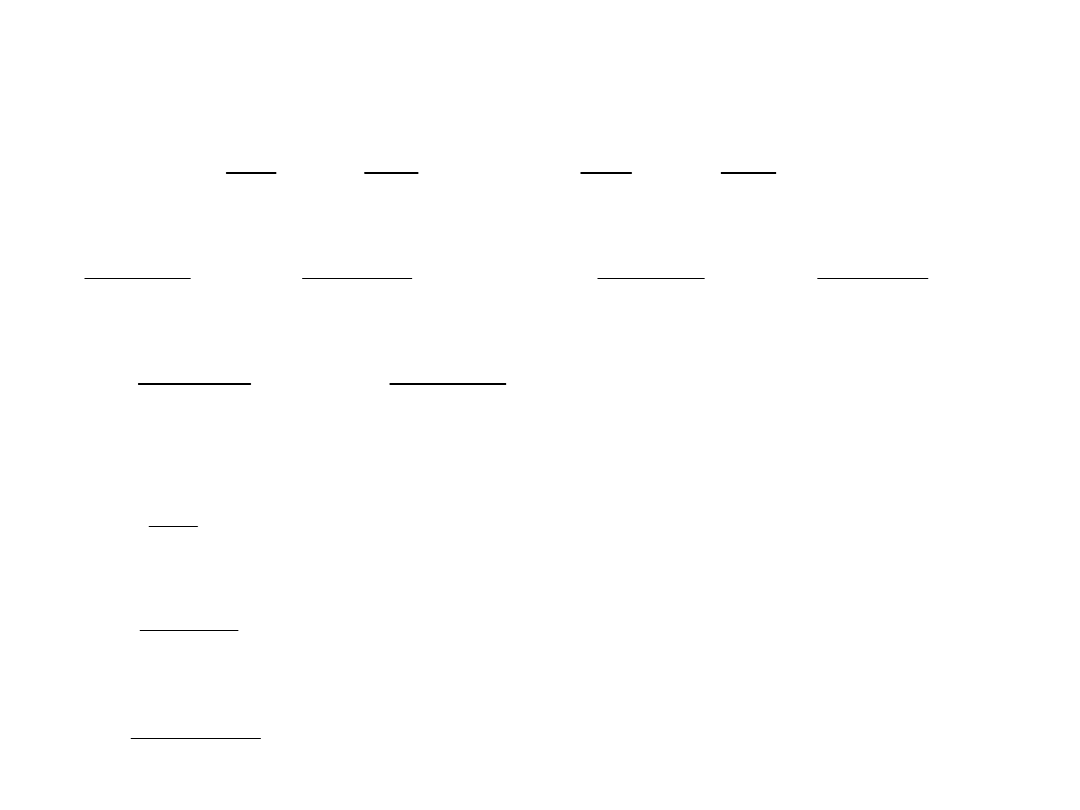
Charakterystyczne błędy
przetworników
n
Y
X
n – charakterystyka
nominalna
Y=SX
X
1
a
n+a
n
Y
X
a - błąd addytywny
(błąd zera)
n+a - ch. z uwzględnieniem
błędu addytywnego
Y=SX+a
X
1
SX
1
(1+
m
)
n+m
n
Y
X
m
- błąd multiplikatywny
(błąd skali)
n+m
- ch. z uwzględnieniem
błędu multiplikatywnego
Y=SX(1+
m
)
X
1
lmax
n+l
n
Y
X
l
- błąd nieliniowości
n+l - ch. z uwzględnieniem
błędu nieliniowości
Y=SX
l
X
n
n+d
n
Y
X
d
- błąd dyskretyzacji
n+d - ch. z uwzględnieniem
błędu dyskretyzacji
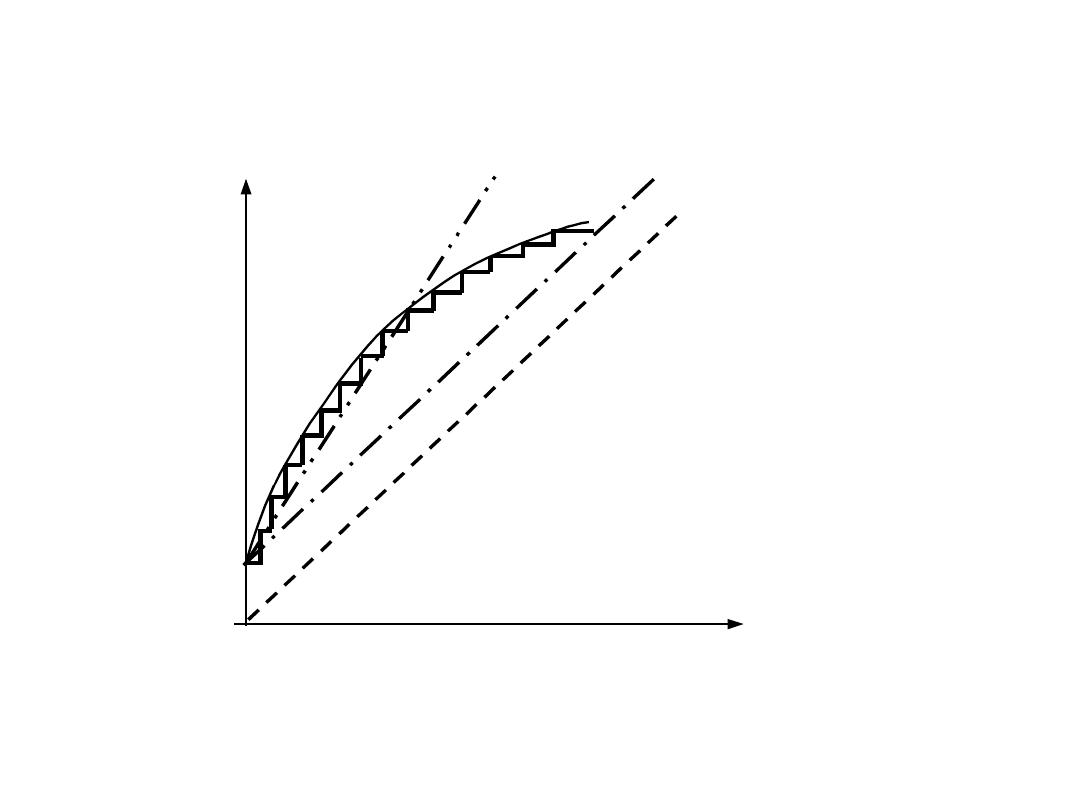
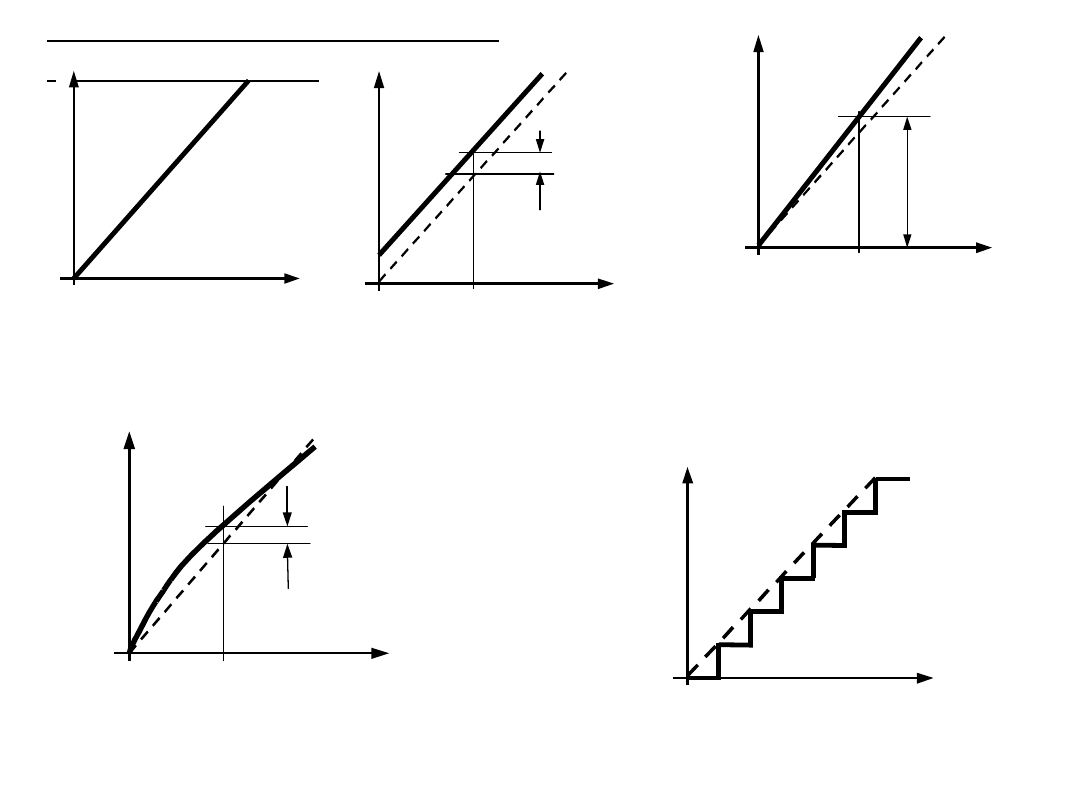
Całkowity błąd przetwarzania i jego
składowe
2
4
Y
X
1 – n charakterystyka
nominalna
2 – n+a
3 – n+a+m
4 – n+a+m+l
5 – n+a+m+l+d
3
5
1
Wpływ czynników zewnętrznych na błędy przetwarzania
Metoda
pomiar
u
Narzędzie
pomiarow
e
Odtwarzanie wartości
mierzonej
(wg modelu, algorytmu, ...)
X
V
Y
Z
Statyczna charakterystykę przetwarzania z uwzględnieniem zewnętrznych
wartości wpływających (temperatura, wartość napięcia zasilania, itp.):
gdzie : D
V
, D
Z
– różnice wartości
V
i
Z
od wartości odniesienia (temp.
otoczenia, napięcie zasil., itp.)
...)
,
,
....
,
,
,
(
3
2
1
3
2
1
Z
Z
Z
V
V
V
X
F
Y
Rozwijając funkcję
w szereg Taylora:
gdzie :
- wrażliwość na D
V
n
,
zaś
- błąd
addytywny
, zaś
- błąd multiplikatywny
- interakcja
.....
2
2
......
2
2
.....
2
2
....
.....
)
(
1
2
1
2
2
1
1
1
1
2
2
2
2
1
1
2
2
2
2
1
1
2
2
2
1
1
2
2
1
1
Z
V
Z
V
F
Z
V
Z
V
F
Z
X
Z
X
F
Z
X
Z
X
F
V
X
V
X
F
V
X
V
X
F
Z
Z
F
Z
Z
F
V
V
F
V
V
F
X
F
Y
n
n
W
V
F
...)
,
,
....
,
,
,
(
3
2
1
3
2
1
Z
Z
Z
V
V
V
X
F
Y
n
n
k
V
X
F
2
2
n
n
V
W
n
n
V
X
k
m
n
m
n
Z
V
Z
V
F
2
2
Y
X
a )
Y
X
b )
n
n
n
n
n
n
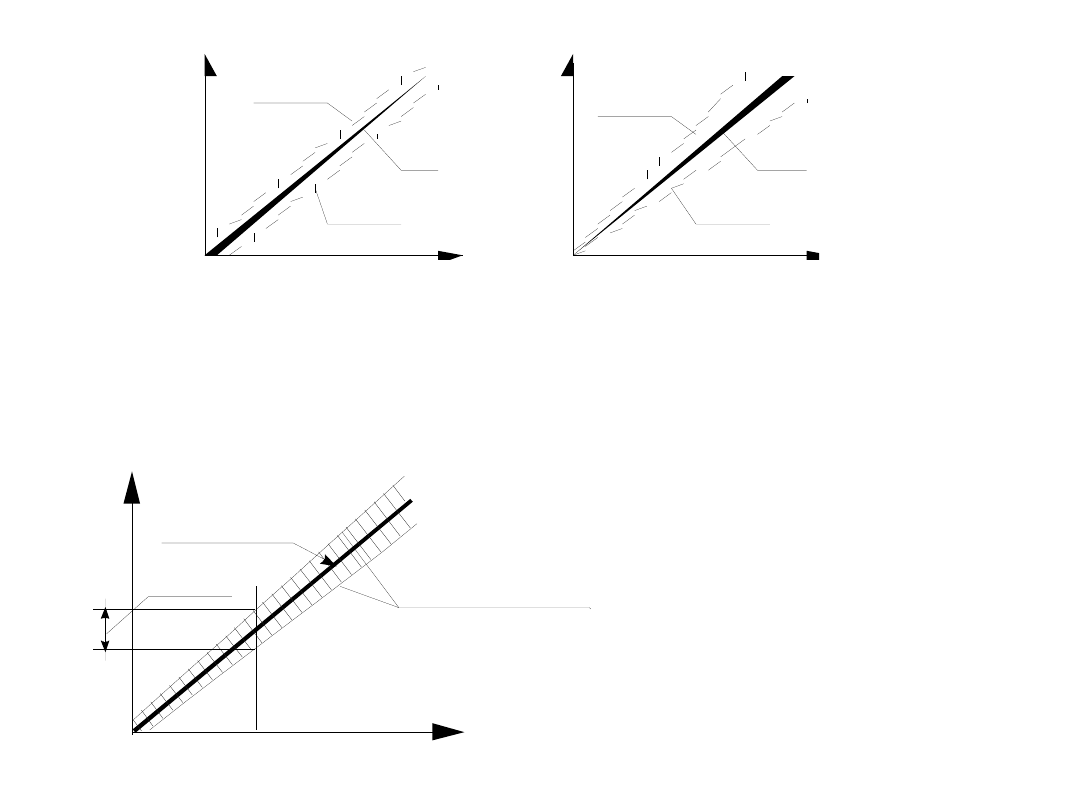
Przykładowy wpływ temperatury otoczenia na charakterystykę
przetwornika.
a.) przesunięcie zera, b.) zmiana czułości
(np. przez wpływ temperatury
na rezystancję R
w obwodzie a.) kompensacji „0”, b.) wzmocnienia, wzmacniacza
operacyjnego)
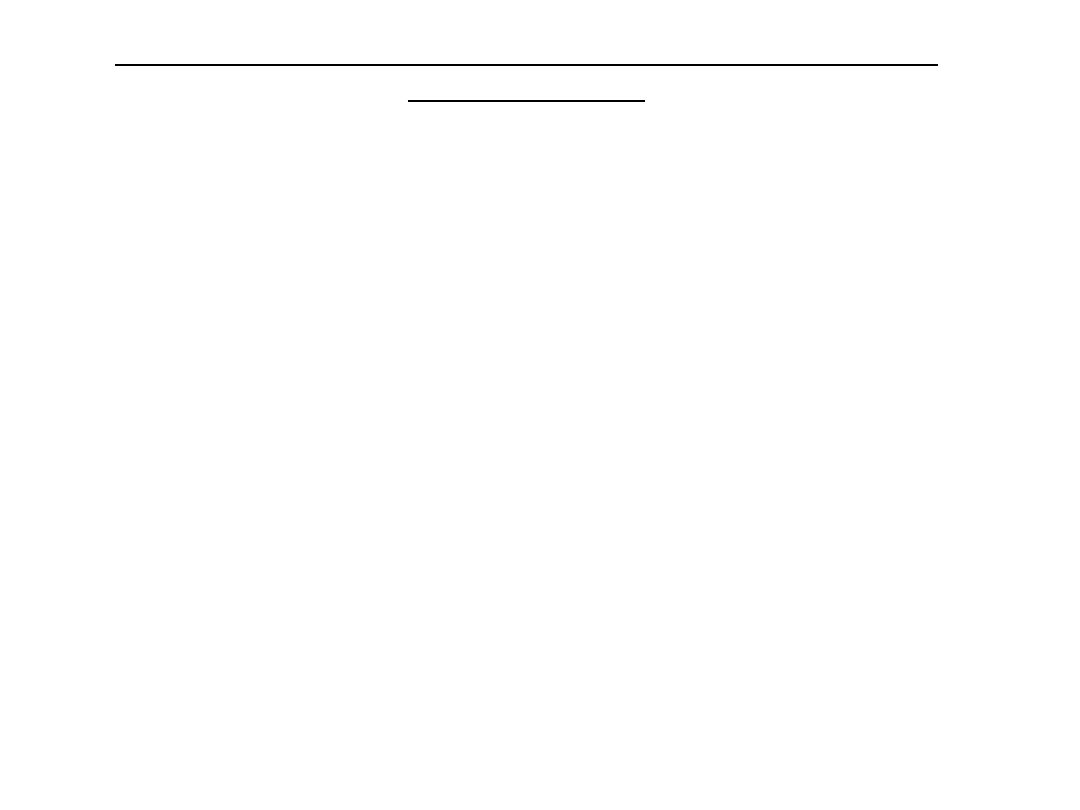
Nieokreśloność przetwarzania (powtarzalność
charakterystyki):
0
Y
X
x
1
c h a r a k te r y s ty k a
n o m in a ln a
g r a n ic a o b s z a r u
n ie o k r e lo n o c i
ś
ś
y
y
1
Nieokreśloność przetwarzania dla
danego stanu na wejściu
Eliminacja błędów spowodowanych wielkościami
wpływającymi
1. Zastosowanie lepszych (droższych): metod, materiałów,
podzespołów, ....
(zmniejszenie wrażliwości na wielkości wpływające)
2. Eliminacja błędów przez:
- separację
- kompensację
- korekcję
- autokalibrację
- linearyzację
Separacja
– niedopuszczenie do oddziaływania wielkości wpływających
na
wrażliwe części układu poprzez:
- ekranowanie kabli
- ekwipotencjalizację
- ekranowanie el-magn.
- termostatyzację
- tłumienie drgań i wibracji
- itp.
Kompensacja
(strukturalna eliminacja błędów)
–
wykorzystuje właściwości celowo zrealizowanych struktur torów
pomiarowych,
w których występuje znoszenie się błędów w poszczególnych
elementach
struktury
(Nie ma jednolitej recepty na możliwość skutecznego zastosowania
kompensacji błędów. Wpływa na to wiele czynników – również koszty)
Założenia upraszczające
Omawiane dalej metody kompensacji błędów rozpatrywane są dla
następujących
założeń upraszczających:
- charakterystyka statyczna jest liniowa
- występuje tylko jedna wielkość wpływająca
Z
- wielkość
Z
wywołuje tylko błędy addytywne i multiplikatywne
- elementem poddanym działaniu wielkości wpływającej
Z
jest
czujnik (sytuacja najczęściej występująca w praktyce).
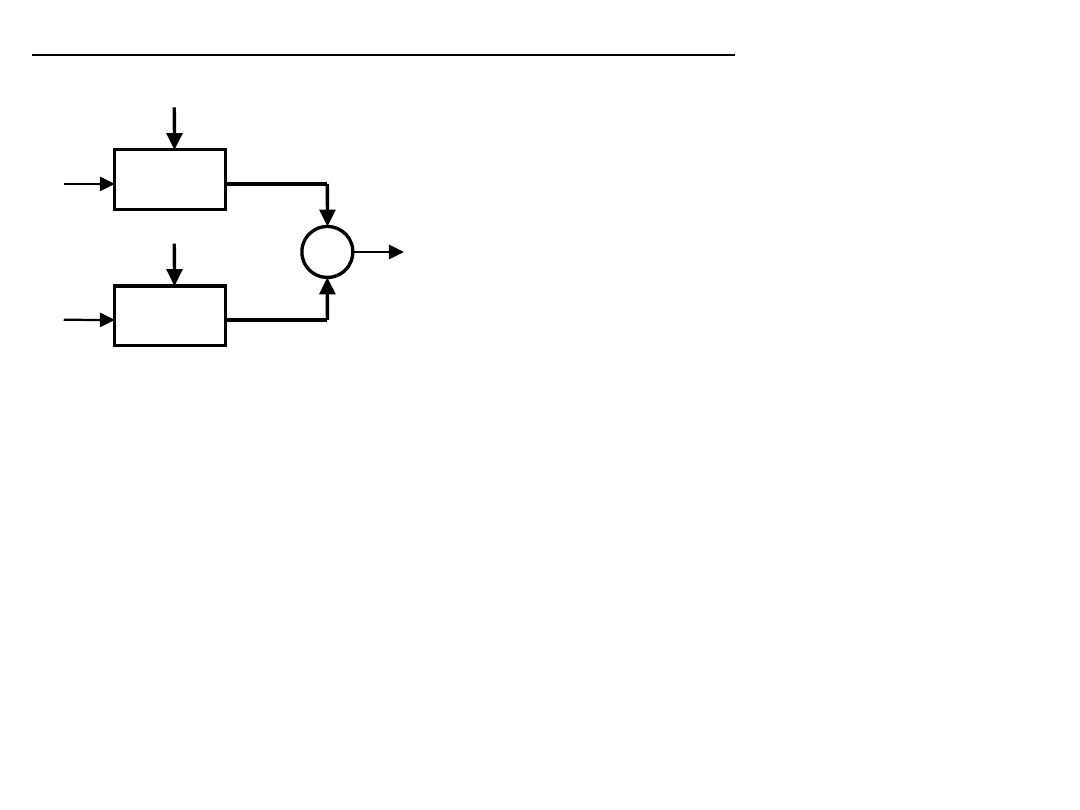
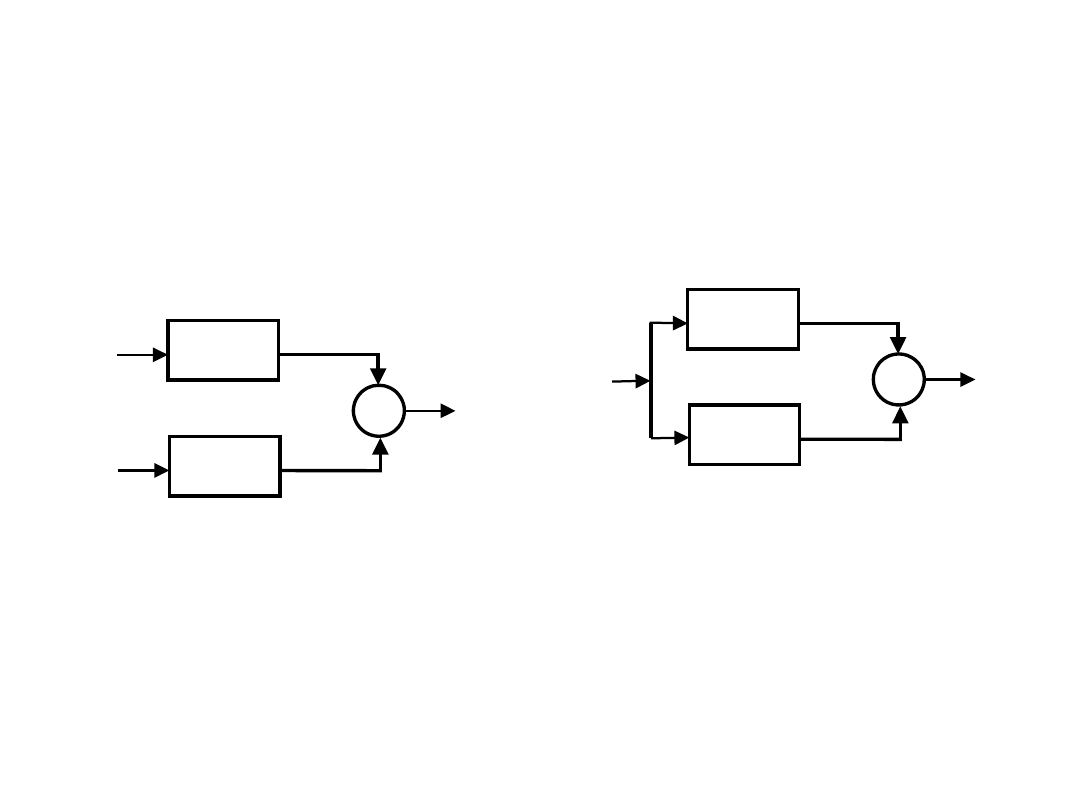
Kompensacja w strukturze równoległej
CZ
KOMP
.
X
Z
Z
Y
1
Y
2
Y
+
_
KOMP. – czujnik, na który nie
działa wielk. wejściowa
X
S
– czułość
W
1
– wrażliwość
k
1
– wsp. multiplikatywny
Dla
W
1
=W
2
eliminacja bł. addytywnych (brak eliminacji bł.
multiplikatywnych
Z
X
k
Z
W
SX
Y
1
1
1
)
0
(bo
2
X
Z
W
Y
K
Z
X
k
Z
W
W
SX
Y
K
1
1
1
)
(
czyli
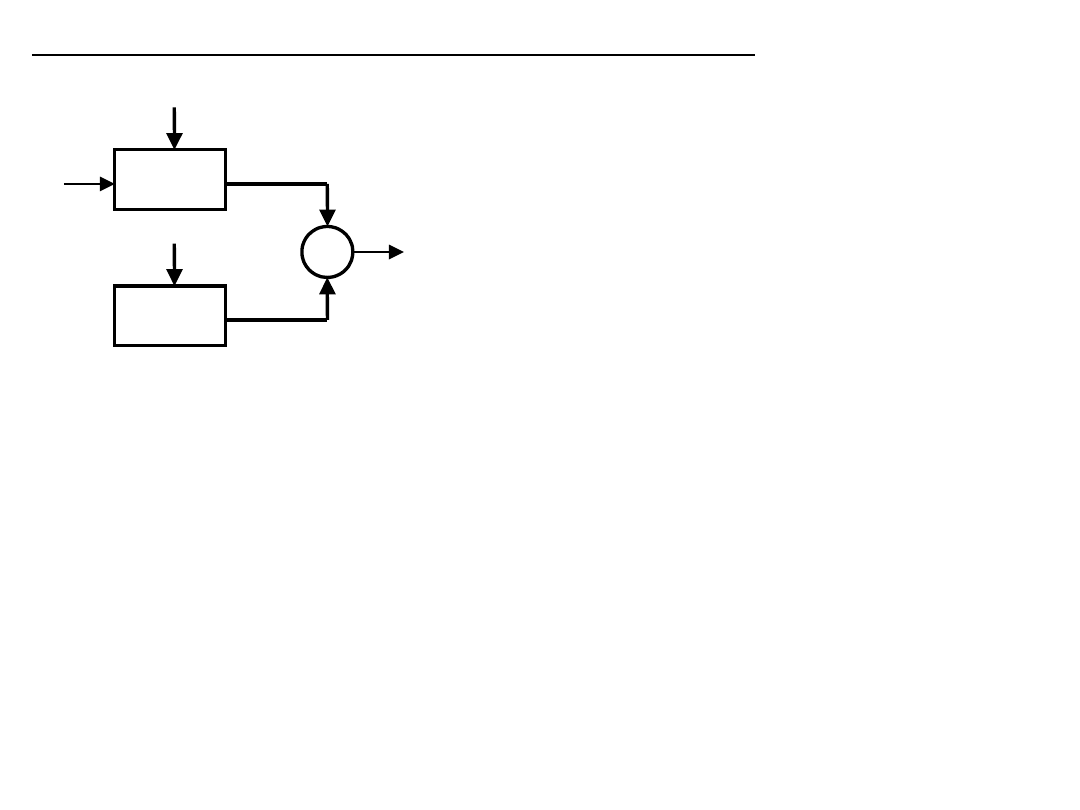
Kompensacja w strukturze różnicowej
- identyczne czujniki 1 i 2
- sygnały identyczne ale o przeciwnych
znakach
(czujniki przemieszczeń –
pojemnościowe
i transformatorowe, czujn. Naprężnooporowe
- nalepione na dwóch stronach belki zginanej,
…. )
– 2 razy większa czułość
– eliminacja bł. addytywnego
– 2 razy większy bł multiplikatywny
CZ 1
CZ 2
+
X
Z
Z
Y
1
Y
2
Y
+
_
-X
Z
kX
Z
W
SX
Y
1
Z
kX
SX
Y
2
2
czyli
Z
kX
Z
W
SX
Y
2
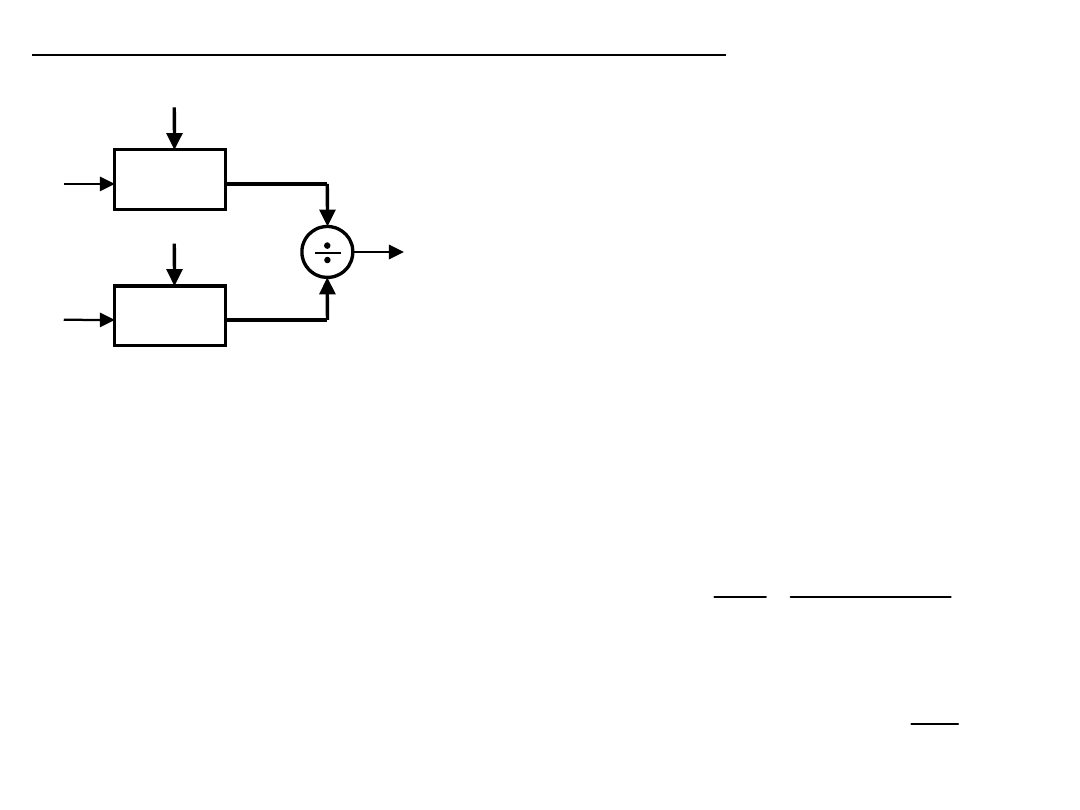
Kompensacja w strukturze ilorazowej
- identyczne czujniki 1 i 2
- X
0
- wielkość stała o tym samym
charakterze
co wielkość wej. X
- realizowane w technice cyfrowej lub
impulso-
wej (bo sygn. analogowe trudno się
dzieli)
CZ 1
CZ 2
X
Z
Z
Y
1
Y
2
Y=Y
1
/
Y
2
X
0
Strukturę można wykorzystać do eliminacji bł. multiplikatywnych dla
małych bł. addytywnych gdyż:
Dla identycznych czujników:
Z
X
k
Z
W
X
S
Y
1
1
1
1
)
(
2
2
1
1
0
2
1
dla
Z
k
S
Z
k
S
X
X
Y
W
W
Z
X
k
W
X
S
Z
X
k
Z
W
X
S
Y
)
(
0
2
2
0
2
0
2
2
0
2
2
0
2
1
2
1
czyli
i
X
X
Y
k
k
S
S
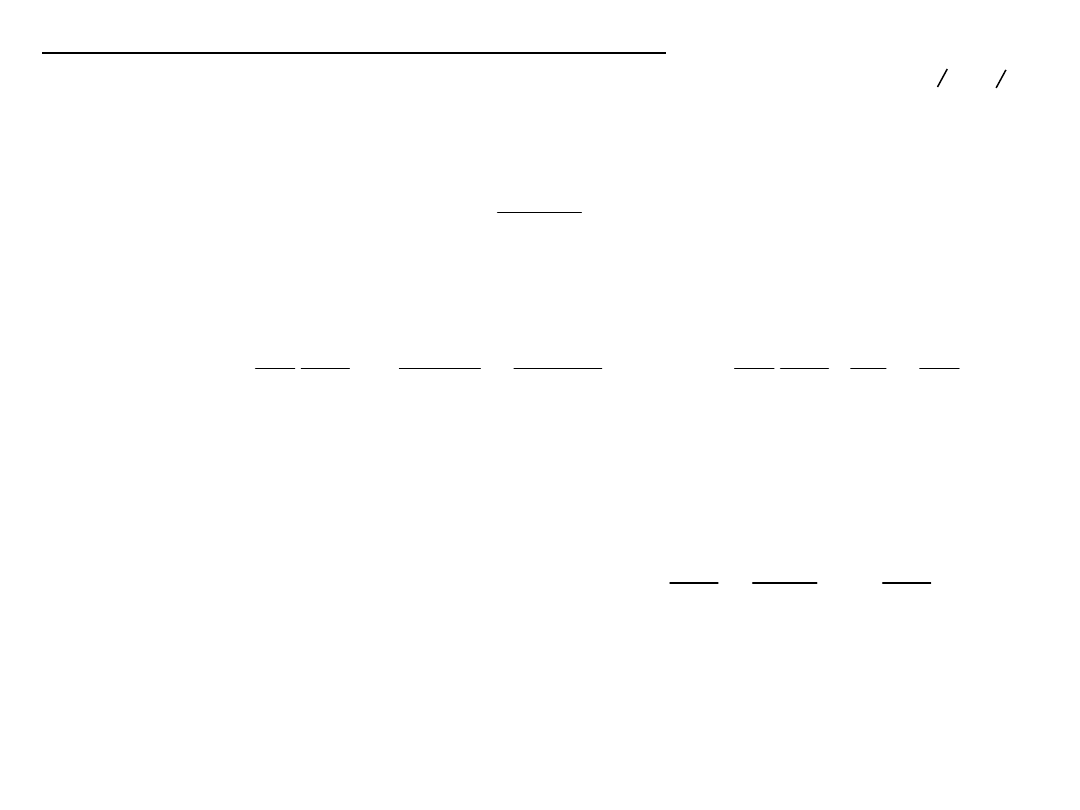
Kompensacja w strukturze ilorazowej c.d. – gdy występują składniki
addytywne
W
1
=
W
2
=
0
Gdy wrażliwości na D
Z
są małe w stosunku do czułości
to wówczas:
Dla identycznych czujników
S
1
=
S
2
=
S
oraz
W
1
=
W
2
=
W
Składowa addytywna nadal występuje i znika jedynie dla
X
=
X
0
Ta metoda nie eliminuje błędów addytywnych, ale bardzo redukuje ich
wartość.
2
2
2
0
2
oraz
S
Z
k
S
X
Z
W
Z
S
k
S
k
X
X
S
S
Z
X
X
S
W
S
X
S
W
X
X
S
S
Y
)
(
)
(
2
2
1
1
0
2
1
2
0
2
2
2
1
0
2
1
0
2
1
Z
X
X
SX
W
X
X
Y
)
(
0
0
0
1
Kompensacja w strukturze szeregowej
- Rzadko wykorzystywana bo
wymaga
rozbudowy części analogowej
układu
- KOMP. nie jest czujnikiem
(realizuje
zupełnie inną funkcję)
kompensują się błędy addytywne i multiplikatywne (b.trudne do
spełnienia).
– met. wykorzystywana raczej rzadko do eliminacji bł.
multiplikatywnych
– trudna do realizacji z uwagi na inną budowę CZ i KOMP.
CZ
KOMP.
X
Z
Z
Y
Y
1
Jedynie przy równoczesnym spełnieniu:
Z
kX
Z
W
SX
Y
1
2
2
Z
kX
k
Z
W
k
Z
kX
S
Z
SX
k
Z
W
S
Z
W
SX
S
Y
K
K
K
K
K
K
K
Z
Y
k
Z
W
Y
S
Y
K
K
K
1
1
W
S
W
k
S
k
S
K
K
K
K
oraz
Korekcja błędów
- realizowana jest w trzecim bloku układu (bloku odtwarzania wartości
mierzonej
Korekcję przeprowadza się na wartościach numerycznych
N
gdzie:
N
=
aY
Dla jednej wielkości wpływającej
Z
:
Korekcja ma być przeprowadzona wg charakterystyki odwrotnej:
Aby przeprowadzić korekcję należy zmierzyć D
Z
odrębm układem.
Im mniejsze są wartości W
N
i
k
N
tym mniejsza jest wymagana dokładność
pomiaru D
Z
dająca wymagane efekty korekcji.
Korekcję algorytmiczną przeprowadza się:
- metodą tablic przeglądowych
- metodą obliczeniową
Z
X
k
Z
W
X
S
N
N
N
N
)
(
1
Z
N
W
N
Z
k
S
X
N
N
W korekcji
metodą tablic przeglądowych
zapisuje się
uprzednio poprawki wyznaczone w czasie wzorcowania
Poprawka:
- procedura prosta przy występowaniu jedynie bł. addytywnych (mierzy
się
D
Z
,
odczytuje się z tablicy najbliższą wartość
D
Z
i
i wprowadza się poprawkę
z tablicy)
- przy występowaniu bł. multiplikatywnych tablica robi się
wielowarstwowa, zajmuje
więcej pamięci i jest trudna do wyznaczenia (wzorcowanie w b. wielu
punktach)
W korekcji
metodą obliczeniową
oblicza się on-line poprawkę
P
(wg w/w wzoru) i wprowadza się ją do wyniku.
- metoda trudna przy występowaniu wielu wielkości wpływowych z
powodu
komplikowania się zależności
(tablice też gwałtownie rosną)
- dla bardziej złożonych obliczeń stosuje się metody iteracyjne
(met.
kolejnych
przybliżeń)
)
Z
W
Z
k
S
S
Z
k
S
Z
k
N
XS
P
N
N
N
N
N
N
N
N
N
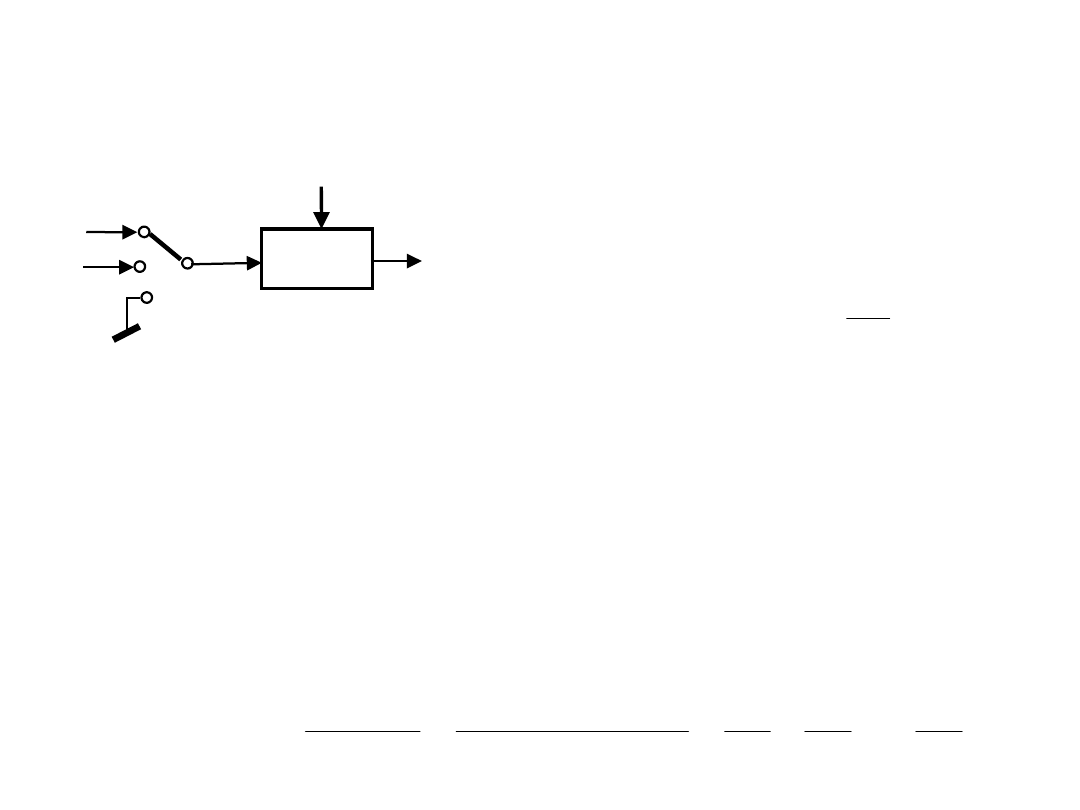
Autokalibracja
- podobnie jak korekcja realizowana jest na wartościach numerycznych
N
W jednostce obliczeniowej wyznacza się:
N
S
Z
1
2
3
X
X
0
- występują błędy addytywne i
multiplikatywne
- błędy są wolnozmienne
- pomiar odbywa się sekwencyjnie
- w pamięci zapisane jest
Wyniki etapowe:
I ostatecznie:
)
0
bo
(
3
3
0
0
2
1
X
Z
W
N
Z
X
k
Z
W
X
S
N
Z
X
k
Z
W
X
S
N
N
N
N
N
N
N
N
Z
X
k
X
S
N
N
Z
X
k
X
S
N
N
N
N
N
N
3
1
0
0
3
2
C
X
X
n
0
n
n
N
N
N
N
X
X
C
X
X
C
X
X
Z
X
k
X
S
Z
X
k
X
S
N
N
N
N
N
0
0
0
0
3
2
3
1
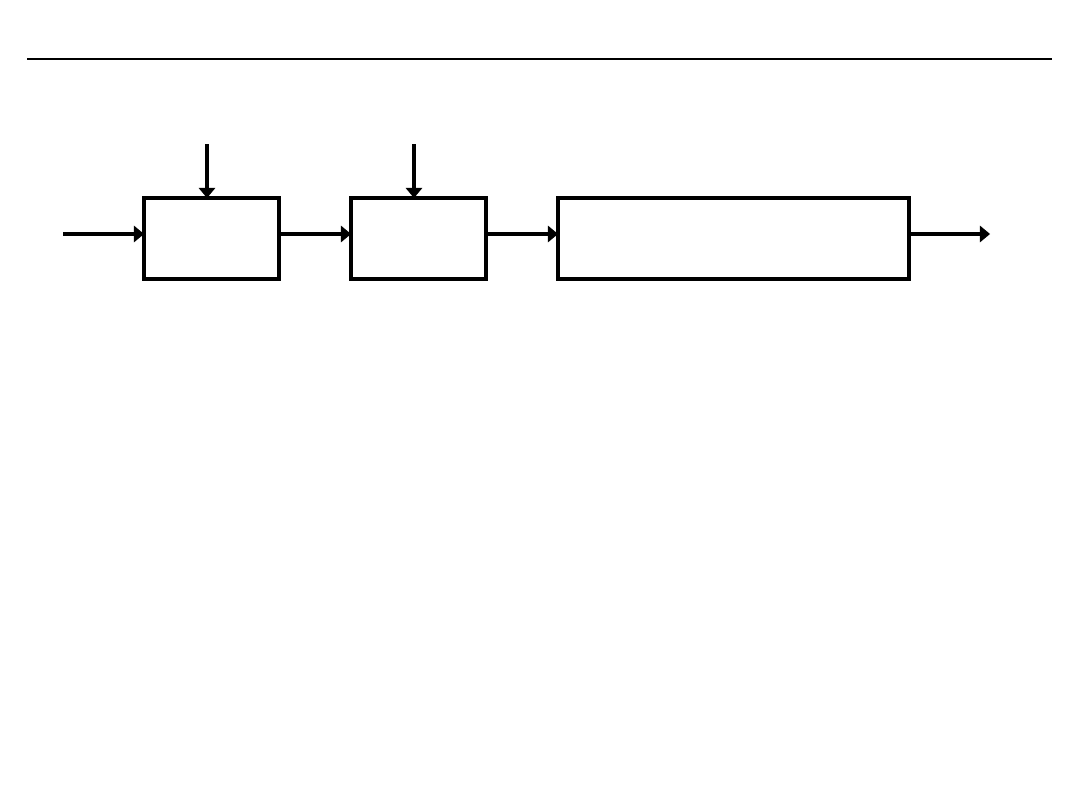
Redukcja błędów przetwarzania na drodze
autokalibracji cyfrowej
Założenia:
• błędy są wolnozmienne
• cały cykl pomiarowy odbywa się w czasie pomijalnym w
stosunku do czasu zmienności błędów
U
x
U
r
E
0
1
2
3
Tor pomiarowy
K
(1
+ )
Wyjście
(N)
Pomiar sekwencyjny:
1)
2)
3)
)
1
(
0
3
K
E
N
Wyznaczanie wyniku na drodze obliczeniowej (w
mikrokontrolerze)
Metoda nie usuwa błędów od nieliniowości (eliminuje bł. addytywne i
multiplikatywne)
)
1
(
)
(
0
1
K
E
U
N
x
)
1
(
)
(
0
2
K
E
U
N
r
)
1
(
3
2
K
U
N
N
r
)
1
(
3
1
K
U
N
N
x
n
x
n
x
r
n
r
x
U
U
C
U
U
U
U
K
U
K
U
N
N
N
N
N
)
1
(
)
1
(
3
2
3
1
Linearyzacja
Linearyzacja układowa w strukturach otwartych i zamkniętych (typu
kompensacyjnego i komparacyjnego) realizowana rzadko z uwagi na
rozbudowane układy i trudną ich regulację
Linearyzację układową można łatwo zrealizować w strukturach różnicowych
z dwoma identycznymi czujnikami i przeciwnymi sygnałami wejściowymi
oraz z dwoma czujnikami o przeciwnych nieliniowościach.
(np. pojemnościowy,
różnicowy czujnik
przesunięcia)
CZ 1
CZ 2
Y
1
Y
2
Y
+
_
X
W układach tych zmniejszając błąd od nieliniowości zwiększa się
jednocześnie czułość układu i odporność na zakłócenia
CZ 1
CZ 2
+
X
Y
1
Y
2
Y
+
_
-X
(np. dwa tensometry
naklejone na dwóch stronach
zginanej belki)
)
(
)
(
max
2
1
X
X
F
Y
X
F
Y
)
(
)
(
2
1
X
F
X
F
Y
Y
Y
Realizując
linearyzację algorytmiczną
podobnie jak dla korekcji
wprowadza się zapisane w tablicy poprawki wyznaczone w procesie
wzorcowania.
(Nie trzeba mierzyć jak dla korekcji wielkości wpływających ponieważ
nieliniowość charakterystyk jest stała).
Własności dynamiczne przetworników
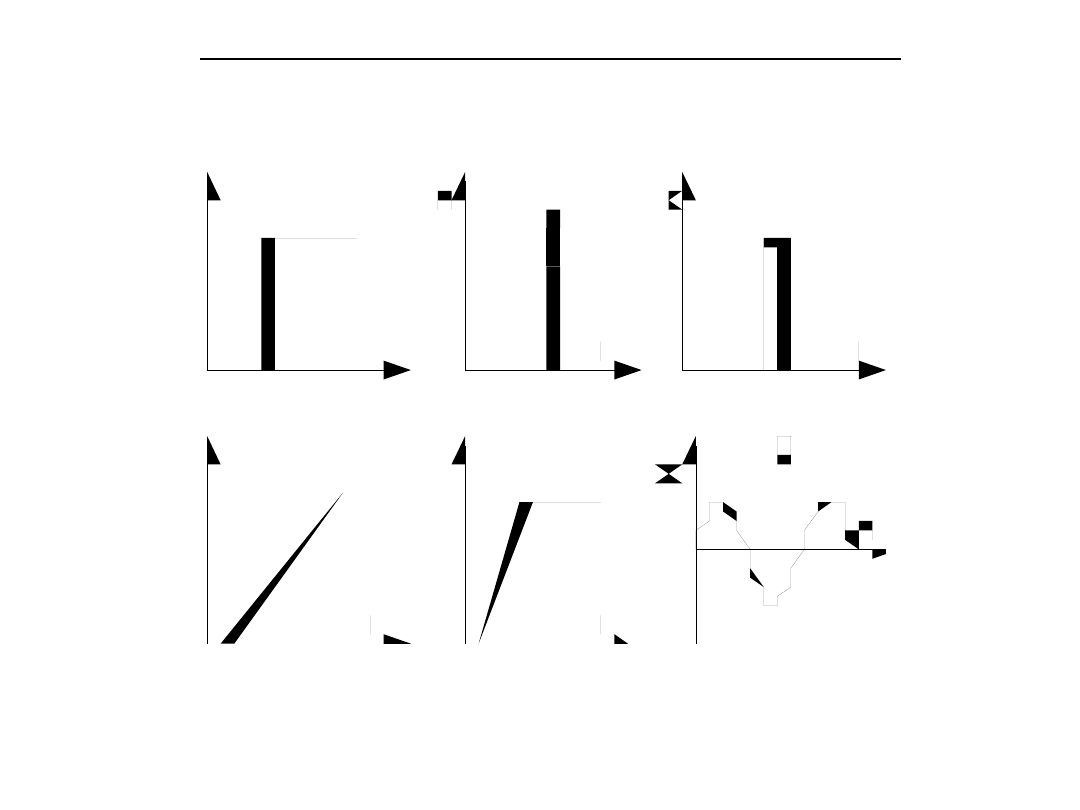
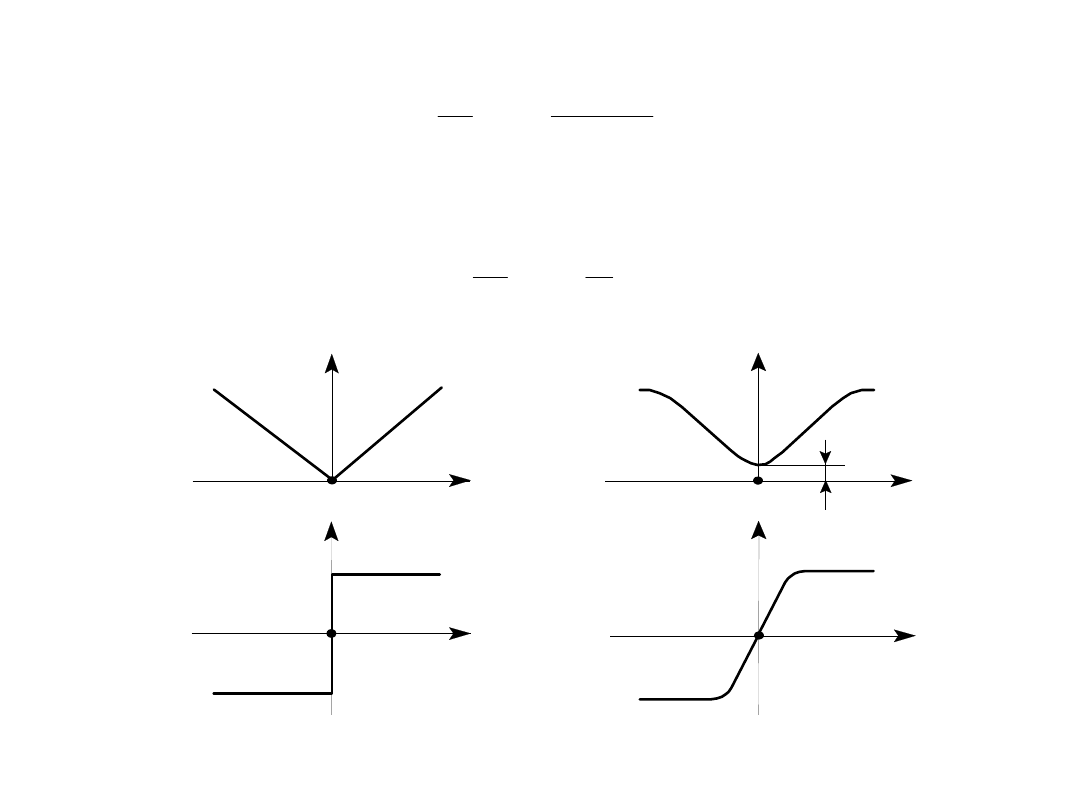
Typowe sygnały wejściowe do badania własności
dynamicznych przetworników
a )
X
t
c )
X
d )
b )
X
e )
Typowe sygnały wymuszające stosowane do badania własności
dynamicznych przetworników:
a.) skok jednostkowy, b.) impuls idealny (pseudofunkcja Diraca), c.) impuls
rzeczywisty,
d.) sygnał liniowy, e.) sygnał liniowy ograniczony, f.) sygnał sinusoidalny.
Odpowiedź przetwornika bezinercyjnego:
gdzie : S - czułość przetwornika (statyczna)
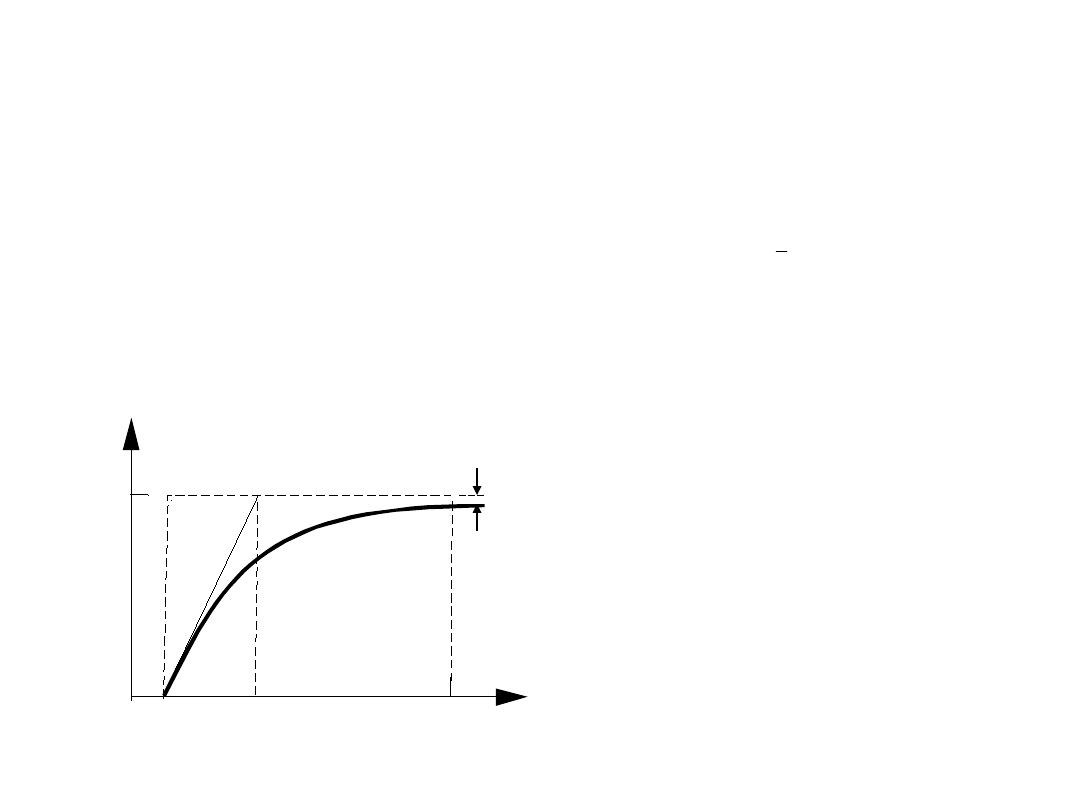
Odpowiedź przetwornika z inercją pierwszego rzędu:
gdzie : A - amplituda skoku jednostkowego
- stała czasowa przetwornika
Y
t
T
0
t
100
t
0
=
C.A
%
Odpowiedź przetwornika
inercyjnego pierwszego rzędu na
skok jednostkowy.
( - stała czasowa przetwornika,
T
0
- czas odpowiedzi)
DY
)
(
)
(
t
x
S
t
y
)
1
(
)
(
t
e
A
S
t
y
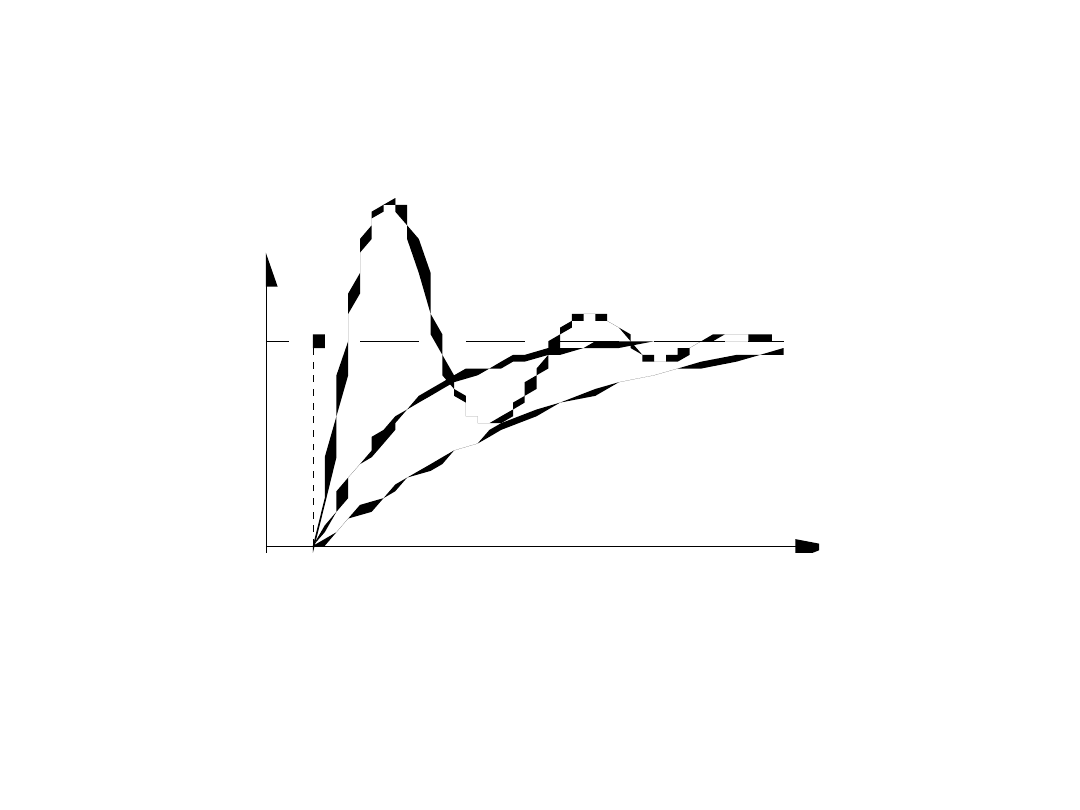
Przetwornik inercyjny drugiego rzędu scharakteryzowany jest
trzema parametrami:
- stałą przetwarzania C (statyczną)
- stopniem tłumienia b (dla b=1 występuje tłumienie krytyczne)
- pulsacją drgań własnych nietłumionych 0
Y
t
1 0 0
%
C A
.
1
2
3
Odpowiedź przetwornika inercyjnego drugiego rzędu na wymuszenie
skokowe:
1 - oscylacyjna (niedotłumiona) (b1), 2 - tłumiona krytycznie (b=1),
3 - przetłumiona (b1)
Odpowiedź tłumiona krytycznie i przetłumiona analogicznie jak dla członu I rzędu.
Parametry charakteryzujące odpowiedź oscylacyjną:
Przeregulowanie - stosunek pierwszego maksymalnego
odchylenia odpowiedzi do jej wartości ustalonej podzielony
przez tą wartość ustaloną.
Dekrement tłumienia - jest to stosunek następujących po
sobie maksymalnych odchyleń od wartości ustalonej. Jest on
równy kwadratowi przeregulowania. (Na podstawie określonego
z zarejestrowanej odpowiedzi przeregulowania lub dekrementu
tłumienia można obliczyć stopień tłumienia.).
Czas narastania - jest to czas w jakim wartość sygnału
narasta od chwili początkowej do pierwszego osiągnięcia
wartości ustalonej.
Czas odpowiedzi (uspokojenia) - jest to (jak dla członu I
rzędu) czas, po którym ustala się (z określoną dokładnością)
wartość sygnału.
Częstotliwość kątowa oscylacji - zależna od stopnia
tłumienia opisana jest wzorem
2
1
exp
b
b
wanie
przeregulo
2
0
1 b

Najgorszym przypadkiem teoretycznym
(nie istniejącym w
rzeczywistości)
jest przetwornik drugiego rzędu z zerowym
tłumieniem. Odpowiedź takiego przetwornika na wymuszenie
skokowe miałaby postać drgań niegasnących o pulsacji
0
.
Przy
testowaniu
przetworników
inercyjnych
sygnałami
sinusoidalnymi występuje tłumienie amplitudy oraz przesunięcie
fazowe odpowiedzi w stosunku do sygnału testowego.
Występowanie
w
przetwornikach
inercji
powoduje
dla
nieustalonych w czasie sygnałów wejściowych powstawanie
błędu dynamicznego
gdzie: y(t)
-
odpowiedź
przetwornika
rzeczywistego
na
wymuszenie sygnałem
testowym,
y
i
(t) - idealny przebieg sygnału wyjściowego
)
(
)
(
)
(
t
y
t
y
t
i

Kryteria całkowe oceny błędu dynamicznego:
- liniowe :
- kwadratowe :
Wytwórca zwykle określa pasmo przenoszenia przetwornika
oznaczające zakres częstotliwości sinusoidalnego sygnału wejściowego,
dla którego błąd dynamiczny nie powinien przekraczać wartości błędu
podstawowego określonego dla charakterystyki statycznej przetwornika.
k
t
L
dt
t
t
E
0
)
(
)
(
k
t
K
dt
t
t
E
0
2
)
(
)
(

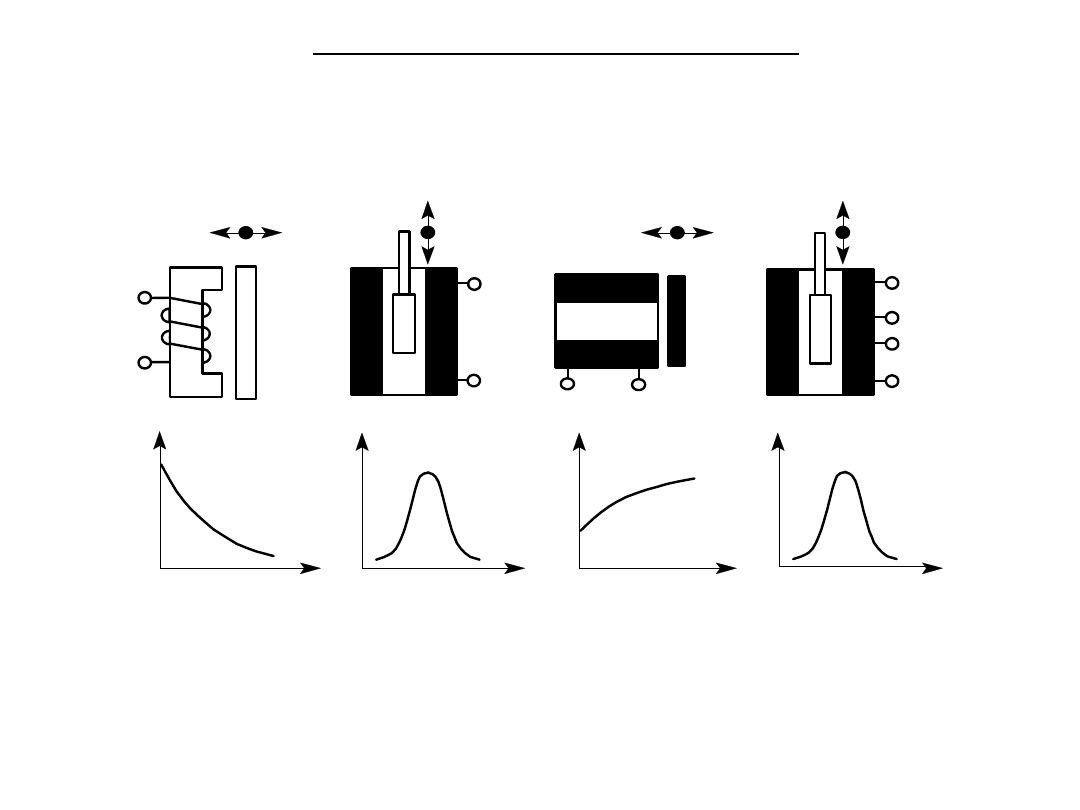
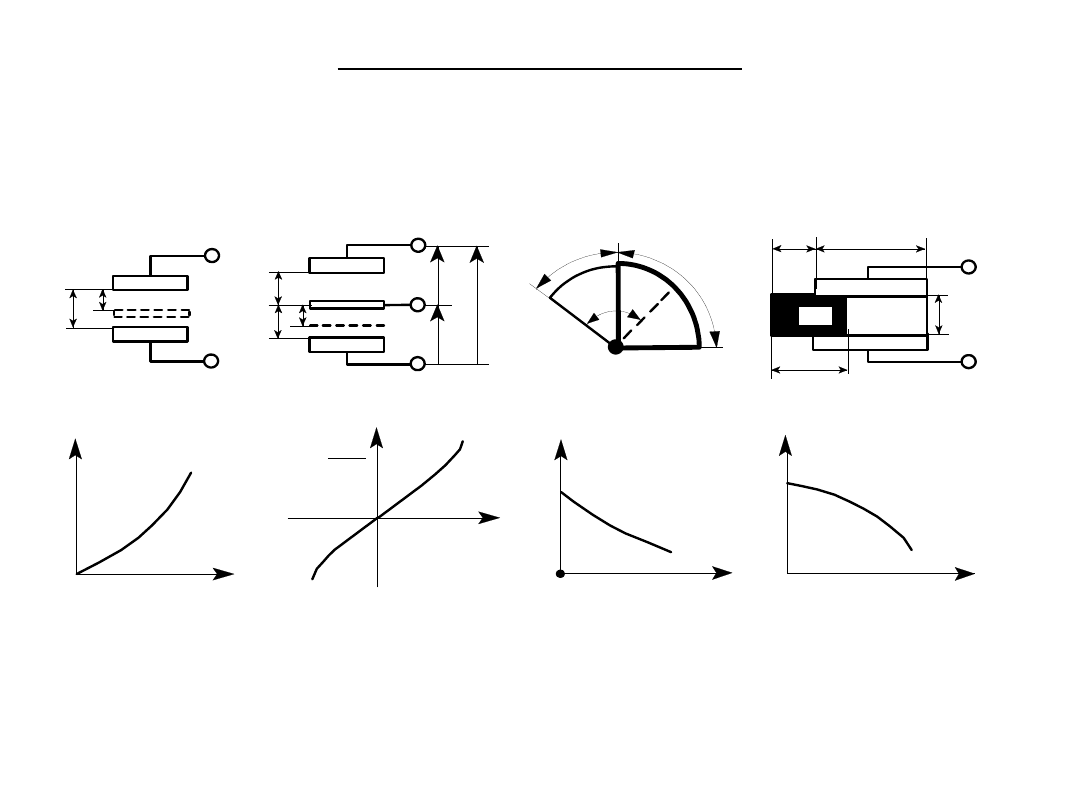
Czujniki indukcyjnościowe
Wykorzystują zwykle zmianę L lub M spowodowaną przesunięciem
liniowym
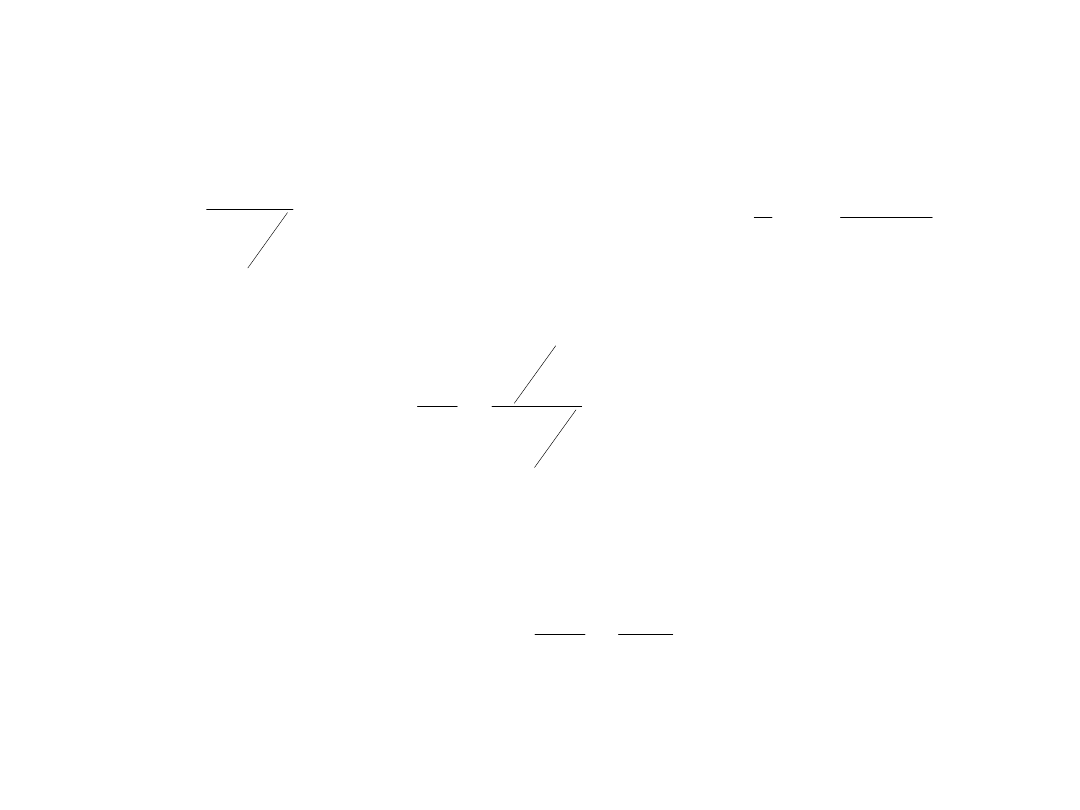
Zasada działania i charakterystyki przetwarzania podstawowych czujników
indukcyjnościowych : a) dławikowego, b) solenoidalnego, c) wiroprądowego,
d) transformatorowego
)
a
x
)
b
x
)
c
x
)
d
x
M
x
L
x
x
L
x
L
W czujnikach transformatorowych bezpośrednio U
wyj
= f(x)
Czujniki o zmiennej ind. własnej (M) pracują zwykle w układzie mostka
niezrównoważonego
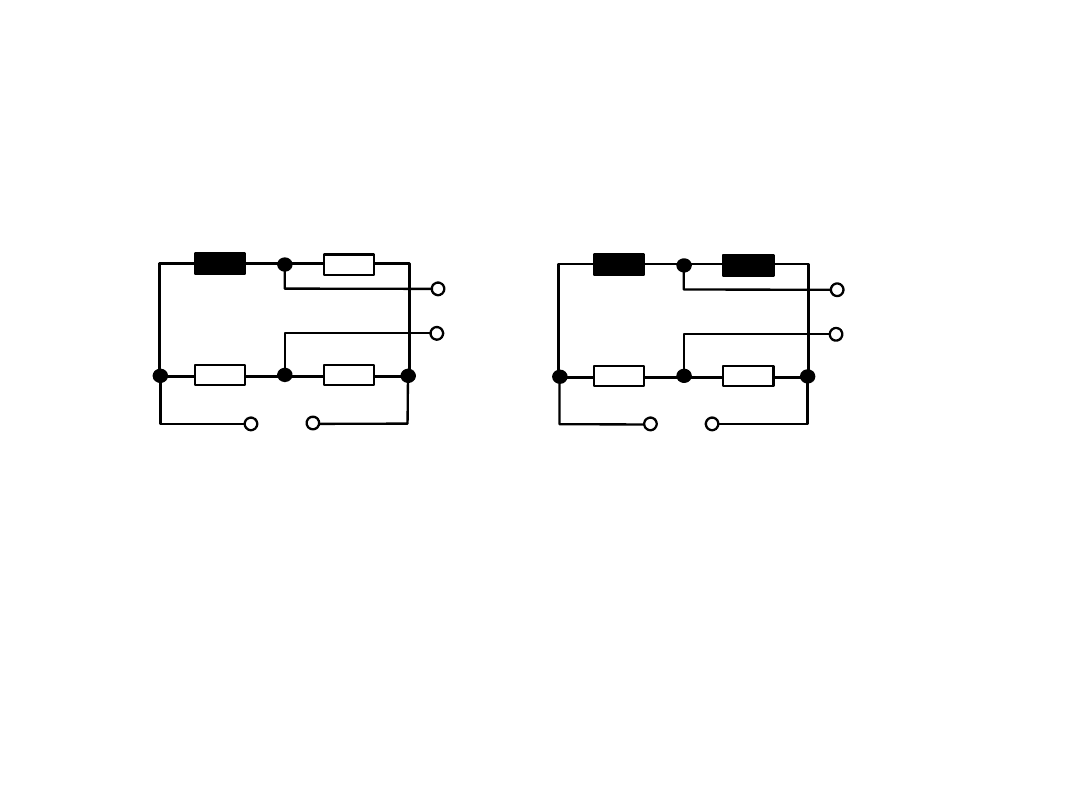
Układ mostka niezrównoważonego : a) z pojedynczym czujnikiem,
b) z dwoma czujnikami w układzie różnicowym.
Dla mostka niezrównoważonego:
gdzie: U
Z
- napięcie zasilające mostka,
S - współczynnik proporcjonalności (czułość mostka),
Z - względna zmiana impedancji czujnika ( Z = Z / Z ).
)
a
U
z
U
wy
Z
1
Z
2
Z
3
Z
4
)
b
U
z
U
wy
Z
1
Z
2
Z
3
Z
4
4
3
2
1
Z
Z
Z
Z
S
U
U
z
wy
Zasada działania indukcyjnościowego czujnika przesunięcia
liniowego L=f(x) lub L/L=f(x)
Pomijając strumień rozproszenia:
lub w przybliżeniu:
gdzie:
z
- iczba zwojów cewki,
R
- reluktancja obwodu magnetycznego (oporność magnetyczna),
0
- przenikalność magnetyczna próżni,
l
p
- długość szczeliny,
S
p
- powierzchnia szczeliny.
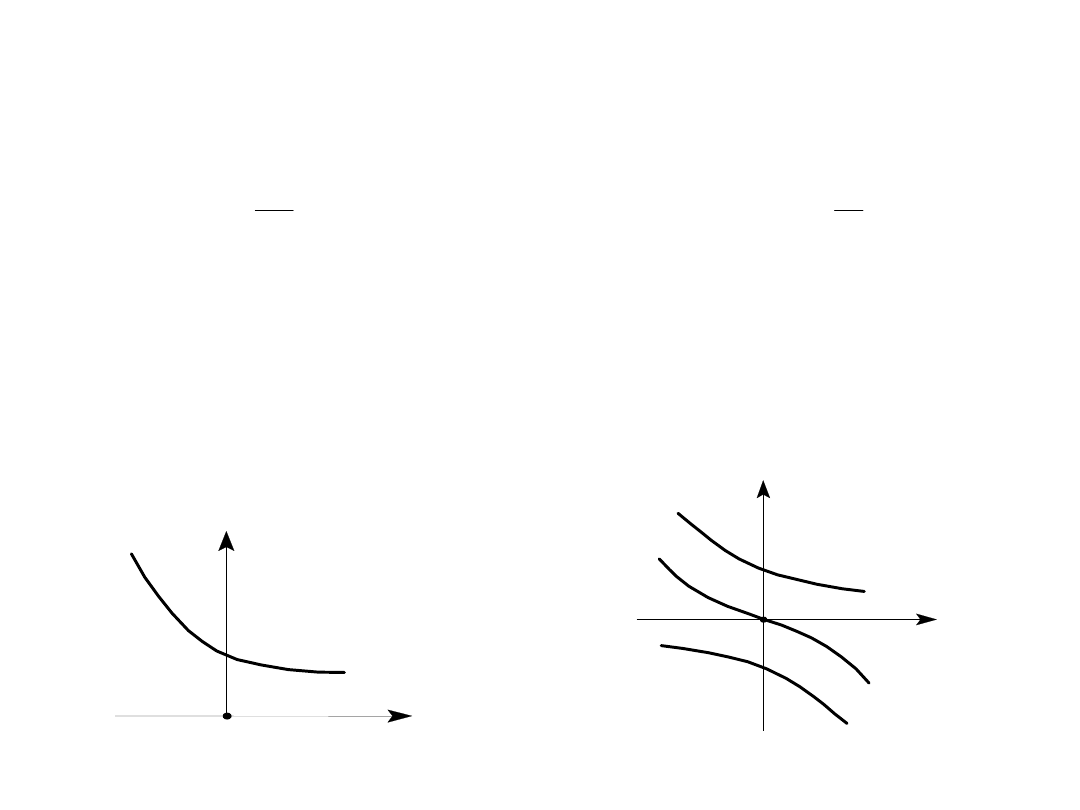
Charakterystyka przetwarzania czujnika dławikowego : a) pojedynczego,
b) podwójnego w układzie różnicowym.
R
z
L
2
p
p
l
S
z
L
1
0
2
)
a
)
b
L
x
L
1
L
x
2
L
L
1
2
L
Długość szczeliny l
p.
dla przemieszczeń części ruchomej rdzenia o wartość
x
wokół położenia ustalonego l
o
gdzie L
o
=f(x=0):
a więc
gdzie
Względna zmiana indukcyjności czujnika (L-L
0
)/L
0
:
Napięcie wyjściowe mostka z dwoma czujnikami w ukł. różnicowym:
x
l
l
p
0
2
0
0
1
l
x
L
L
0
0
2
0
2
1
l
S
z
L
p
0
0
1
l
l
x
x
L
L
2
2
1
1
L
L
L
L
S
U
U
z
wy
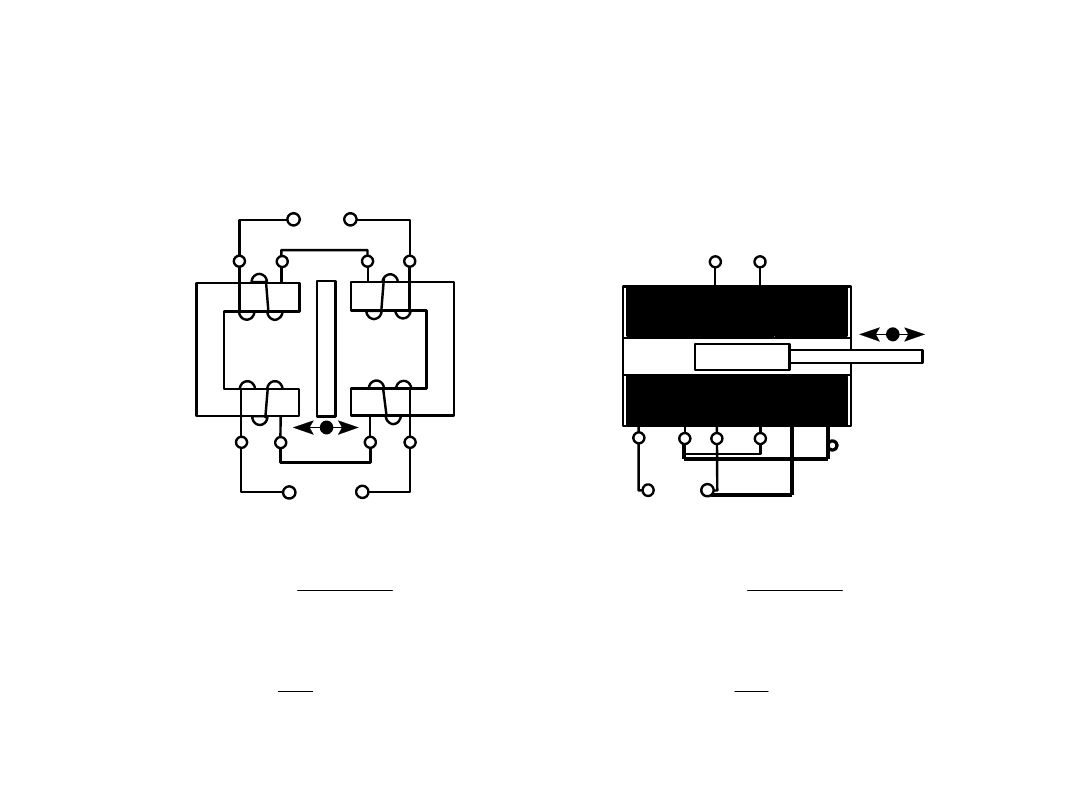
Czujniki transformatorowe
Czujniki transformatorowe - mały błąd nieliniowości (nawet rzędu 0,1%)
- duża czułość
- napięciowy sygnał wyjściowy
Czujniki transformatorowe różnicowe: a) dławikowy, b) solenoidalny.
oraz
gdzie: z
1
, z
2
- liczba zwojów uzwojeń pierwotnych i wtórnych.
2
1
1
1
L
L
L
U
U
z
2
1
2
1
L
L
L
U
U
z
1
1
2
2
U
z
z
U
1
1
2
2
U
z
z
U
)
a
x
U
wy
U
z
1
U
1
U
2
U
2
U
)
b
x
U
z
U
wy
Napięcie wyjściowe czujnika równe różnicy napięć wtórnych wynosi:
Jeżeli szczelina lewej połówki transformatora jest równa 2(l
0
+ x) , zaś
prawej
2(l
0
- x) :
Charakterystyki przetwarzania transformatorowego czujnika różnicowego:
a) idealne, b) rzeczywiste
2
1
1
2
1
2
L
L
L
L
U
z
z
U
z
wy
0
1
2
l
x
U
z
z
U
z
wy
x
x
x
0
U
wy
U
wy
U
x
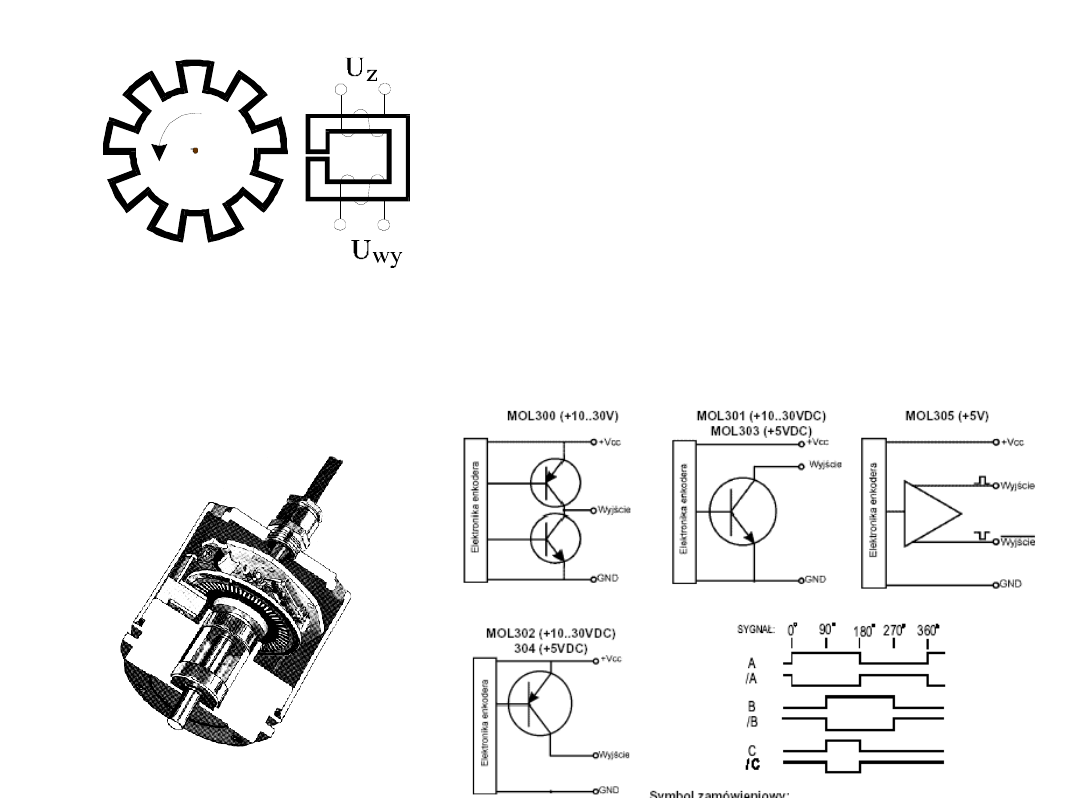
Przykład czujnika indukcyjnego z wyjściem cyfrowym
Indukcyjny czujnik prędkości obrotowej
(kąta obrotu) z wyjściem
dwustanowym
Na podobnej zasadzie działają czujniki optyczne, w których nacięcia
tarczy mogą stanowić przysłony między źródłem i odbiornikiem światła.
Stosując dwie tarcze (przesunięte względem siebie) można mierzyć
wartość i kierunek przesunięcia kontowego.
Czujniki pojemnościowe
Podstawowe typy czujników pojemnościowych oraz ich charakterystyki
Zasada działania i charakterystyki przetwarzania czujników pojemnościowych :
a) o zmiennej odległości elektrod, b) różnicowego o zmiennej odległości elektrod,
c) o zmiennej powierzchni czynnej elektrod, d) o zmiennym położeniu dielektryka.
a)
b)
c)
x
d
C
1
U
1
C
2
C
d
d x
2
U
U
0
0
d)
x
x
l
d
l
C
x
C
x
1
C
2
C
x
l
0
C
C
0
C
C
130
o
a) Czujnik o zmiennej odległości elektrod - do pomiaru małych
przemieszczeń (warunek: x d )
gdzie: x = x / d - względne przemieszczenie elektrody ruchomej.
b) Czujnik różnicowy o zmiennej odległości elektrod –
lepsza czułość i
odporność na zakłócenia zewnętrzne.
oraz
c) Czujnik o zmiennej powierzchni czynnej elektrod – do pomiaru
przemieszczeń kątowych.
d) Czujnik o zmiennym położeniu dielektryka – do pomiaru dużych
przemieszczeń kątowych.
gdzie: C
0
- pojemność spoczynkowa (dla x=0),
,
X
- przenikalność elektryczna dla powietrza i dielektryka o
zmiennym położeniu.
x
x
C
1
x
x
C
C
1
1
2
1
x
U
U
U
U
1
2
0
0
1
C
C
x
l
x
C
C
1
1
0
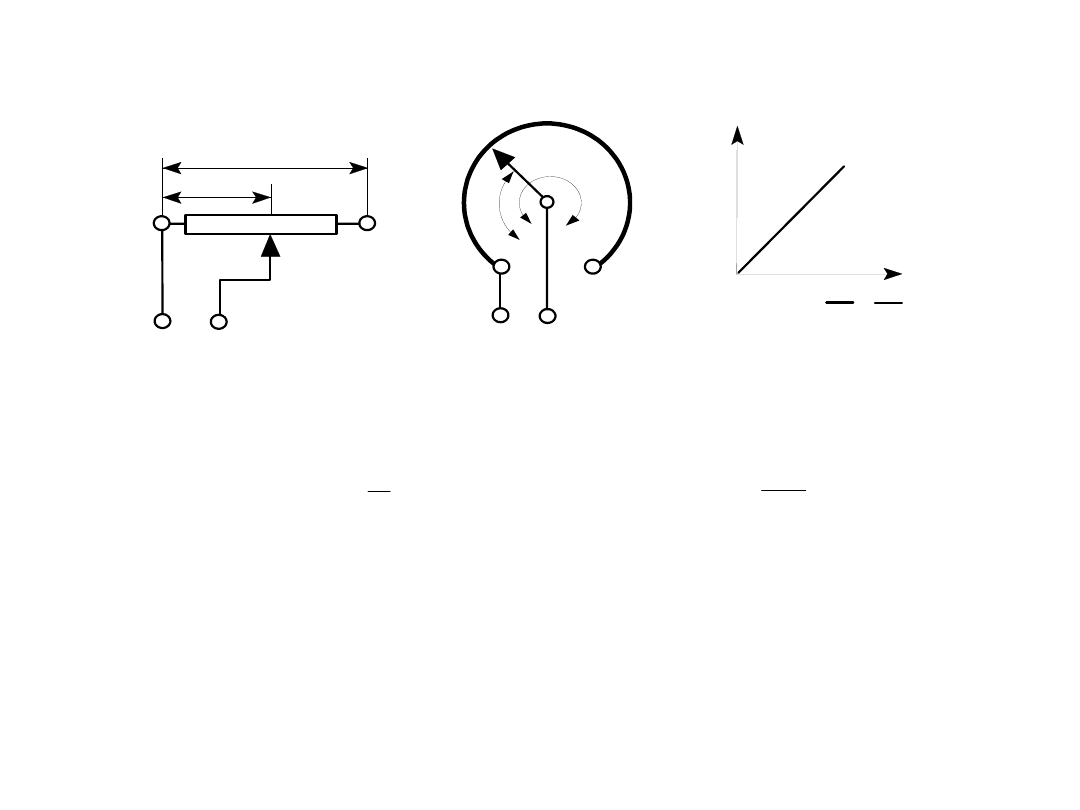
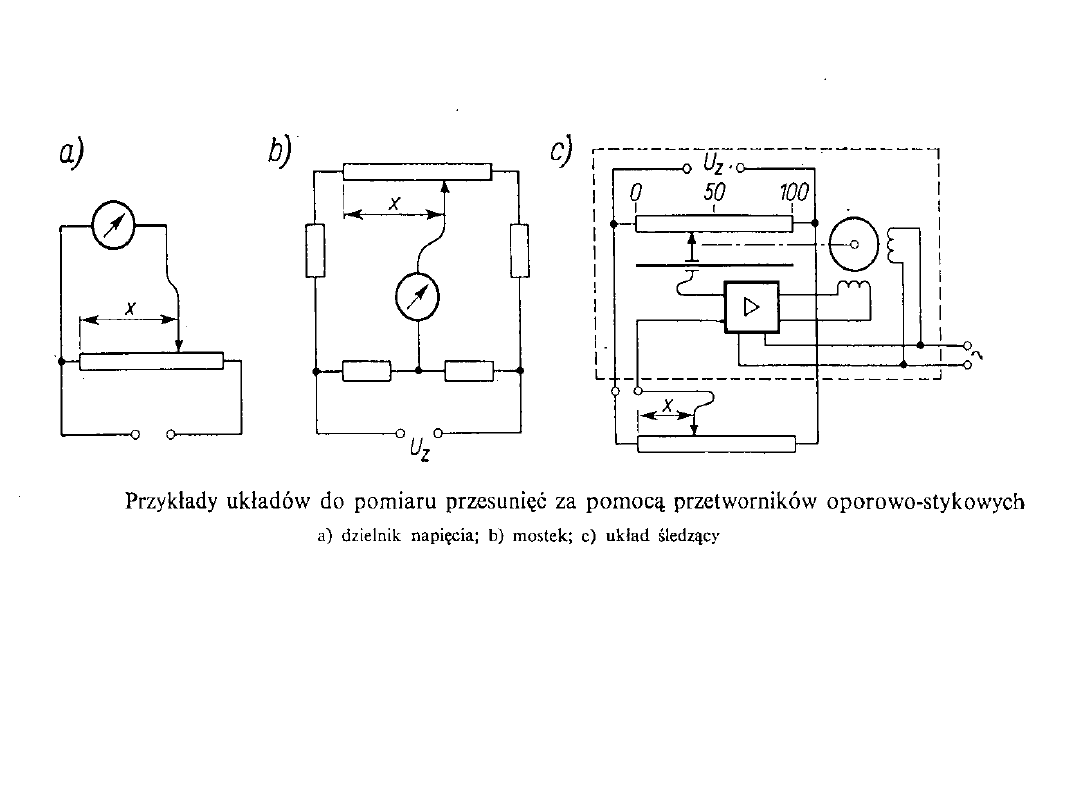
Czujniki rezystancyjne
Czujniki oporowo-stykowe : a) przemieszczenia liniowego,
b) kąta obrotu, c) charakterystyka przetwarzania czujnika.
lub
Zakresy pomiaru przemieszczeń: liniowych - od kilku mm do ok.
1m, kątowych - do ok. 270.
Czujniki tego typu mogą też współpracować z mostkami, w
których obydwie rezystancje czujnika ( R oraz R
n
- R ) włączone
są w sąsiednie gałęzie mostka.
a)
R
x
l
0
)
(
0
R
R
l
x
b)
c)
l
x
R
R
n
n
n
R
R
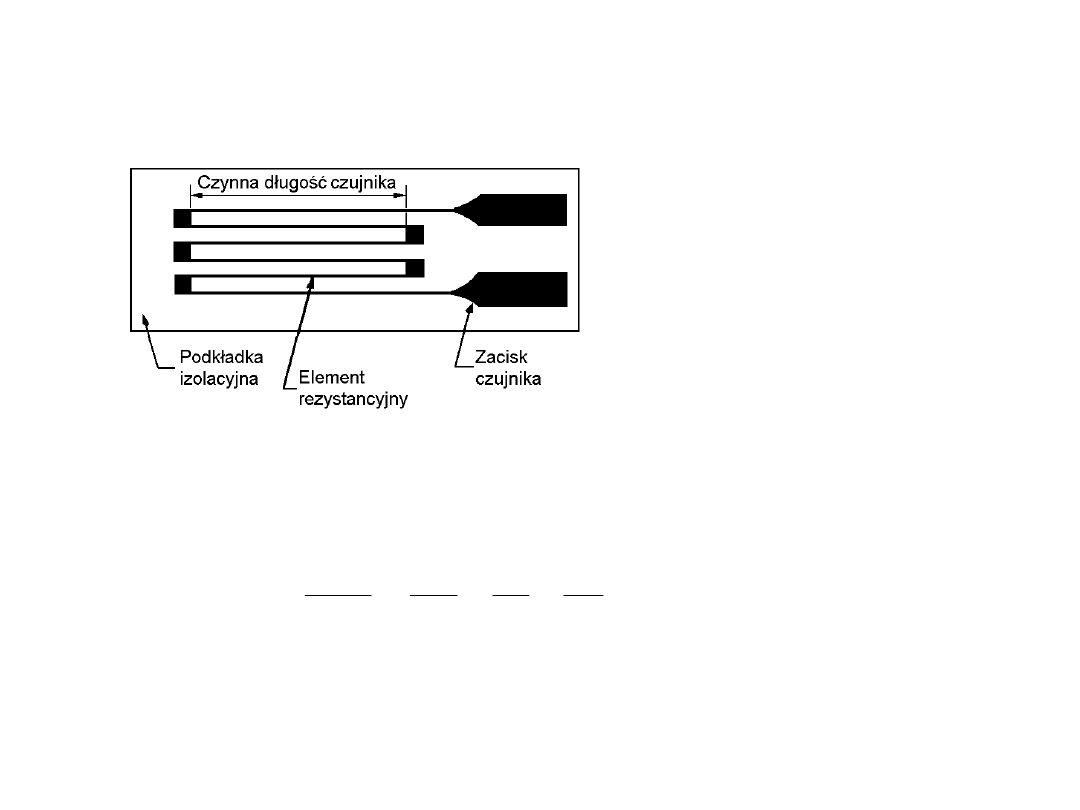
Czujniki naprężno-oporowe (tensometry) (drutowe, foliowe i
półprze-wodnikowe) - wykorzystujące zjawisko zmiany elementu
rezystancyjnego paska pod wpływem naprężenia mechanicznego.
Tensometr foliowy
Pod wpływem występujących naprężeń rozciągających rezystancja
paska R
T
= l/s ulega zwiększeniu a jej względny przyrost
R
wynosi:
gdzie:
- rezystywność materiału siatki (zwykle konstantanu)
l - całkowita długość czynna elementu rezystancyjnego
s - przekrój elementu rezystancyjnego
s
l
T
T
R
s
s
l
l
R
R

Względna zmiana przekroju elementu rezystancyjnego s = ab wynosi:
czyli zmiana rezystancji
R
:
Czułość tensometru k
T
=
R
/
l
:
Czułość: - dla pasków metalowych - ok.2
- dla pasków półprzewodnikowych - do 200
l
s
l
l
b
b
a
a
2
2
2
1
l
R
2
1
l
l
R
T
k
Rezystancyjny czujnik temperatury -
składa się z drutu
metalowego umieszczonego w obudowie.
gdzie: R
0
- rezystancja czujnika w temperaturze
0
,
, - temperaturowe współczynniki rezystancji.
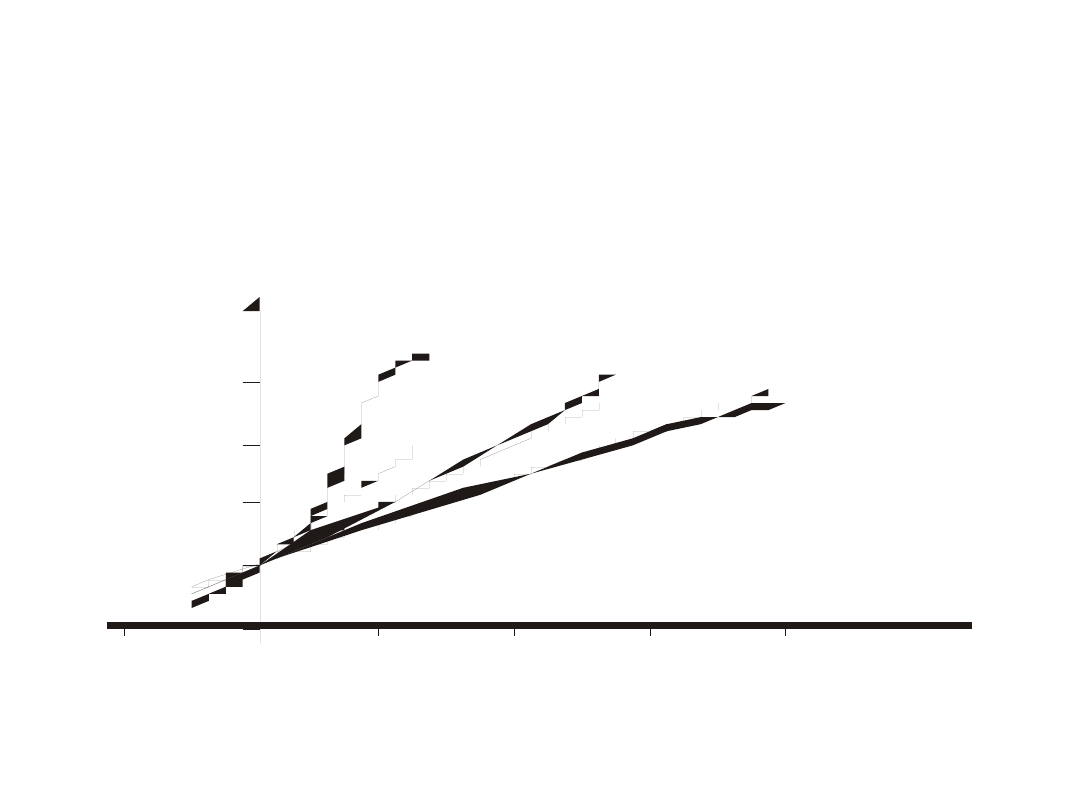
Charakterystyki typowych czujników rezystancyjnych temperatury (metalowych)
2
0
0
0
1
R
R
-2 0 0
2 0 0
4 0 0
6 0 0
8 0 0
[ d eg ]
1
3
R / R
o
Ni
C u
P t
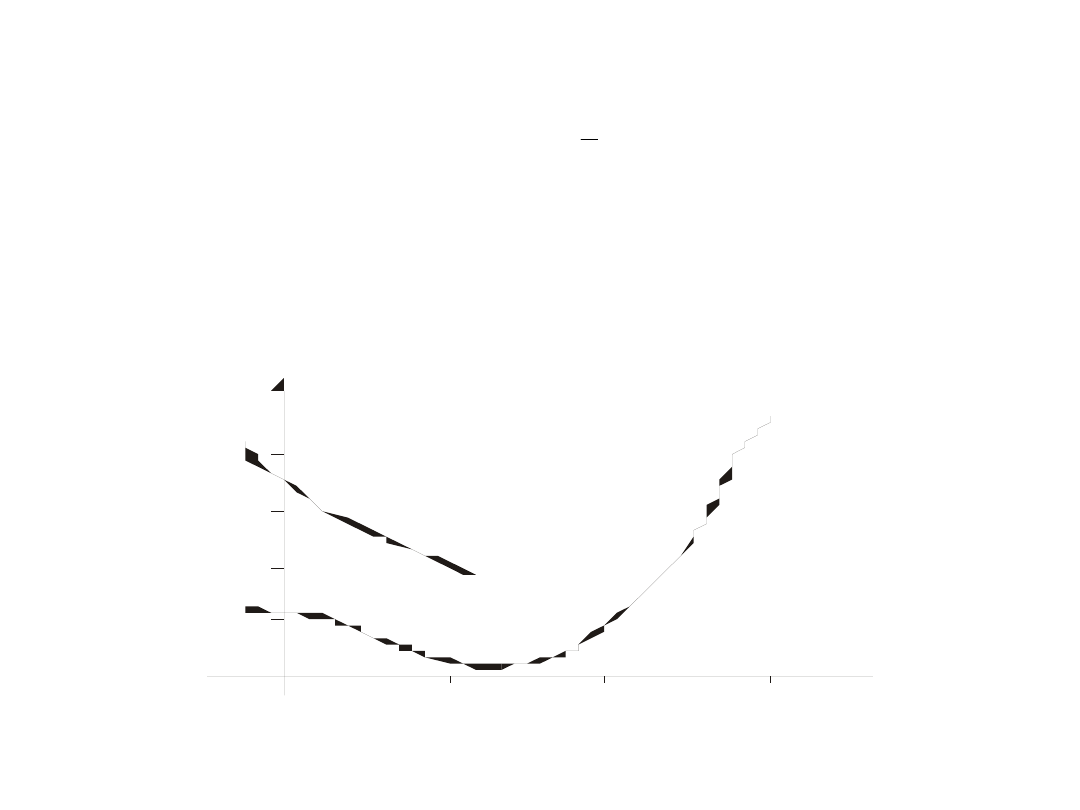
Półprzewodnikowe czujniki rezystancyjne temperatury termistory -
wykonuje się
je z germanu, krzemu lub tlenków metali.
gdzie: A,B - stałe materiałowe
T - temperatura bezwzględna
Rozróżnia się dwa rodzaje termistorów: PTC - z dodatnim
temperaturowym
współczynnikiem rezystancji oraz NTC - ze współczynnikiem ujemnym.
Charakterystyki przetwarzania termistorów PTC i NTC.
T
B
e
A
R
1 0 0
2 0 0
3 0 0
[ d e g ]
1 0
1
1 0
3
R
N T C
P T C
]
Czujniki piezorezystywne wykorzystujące zależność rezystancji
określonych materiałów od siły ściskającej próbkę materiału stosuje się
często do pomiaru ciśnienia, siły, drgań, itp. (tanie i niezawodne,
liniowość rzędu 0,5 do kilku %).
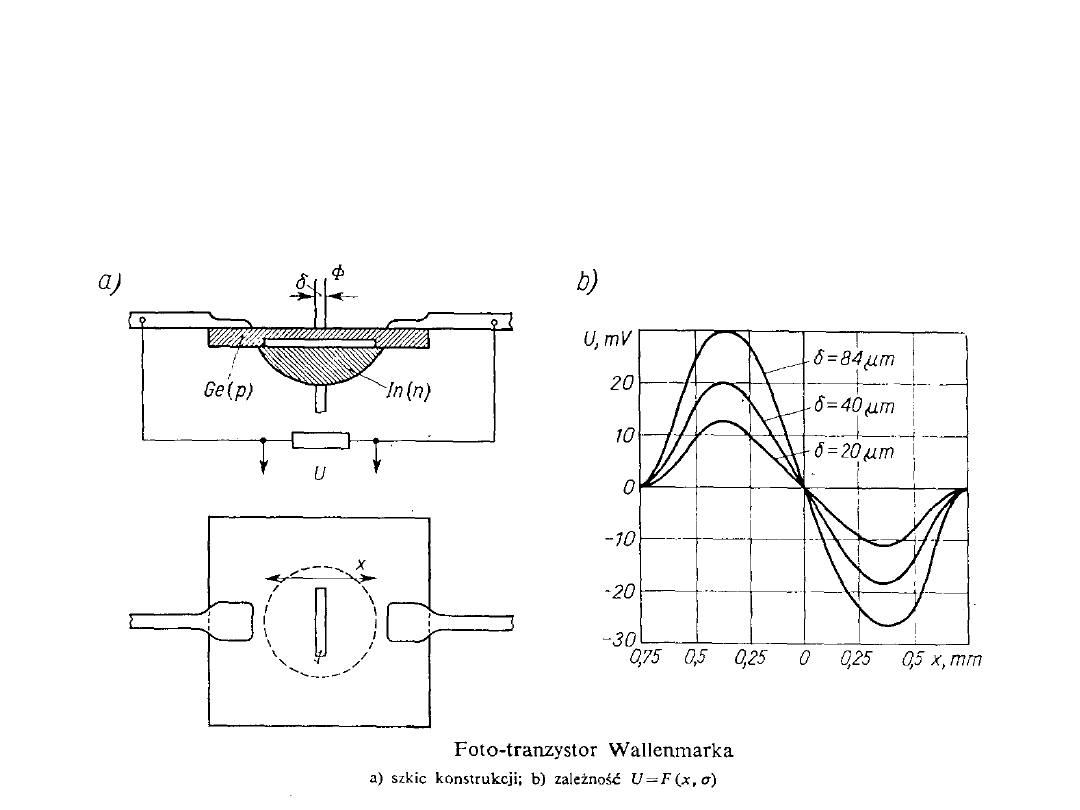
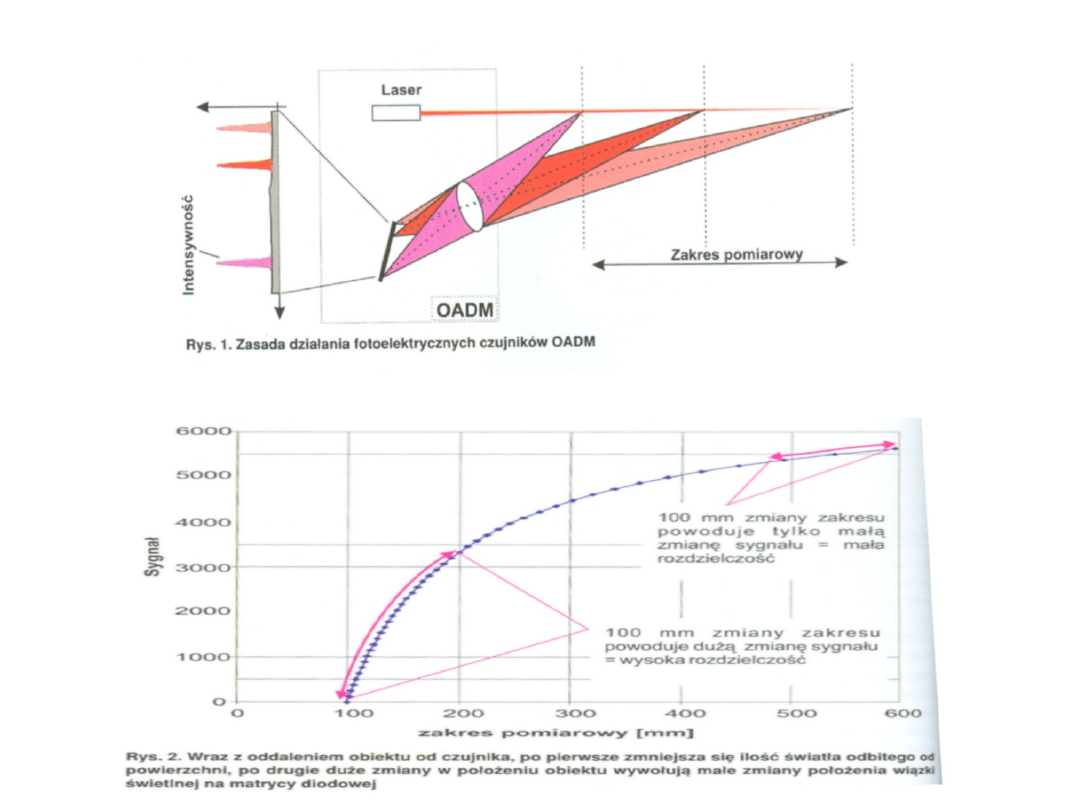
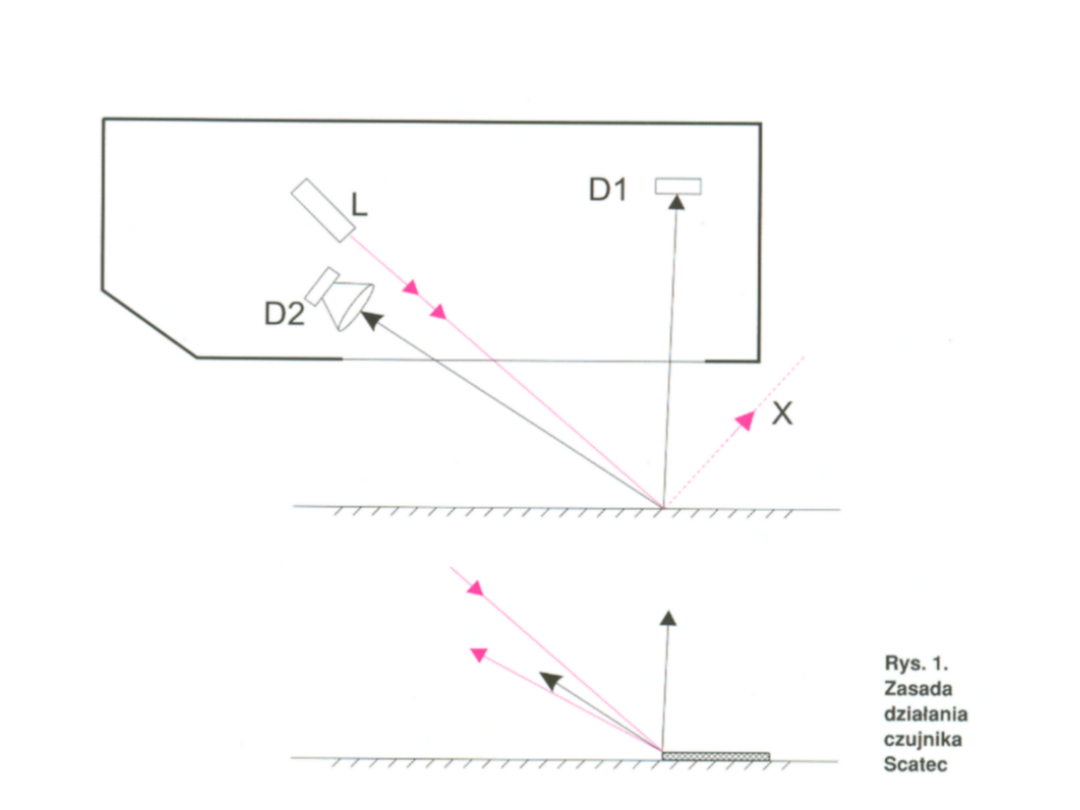
Przykładowy czujnik fotooptyczny
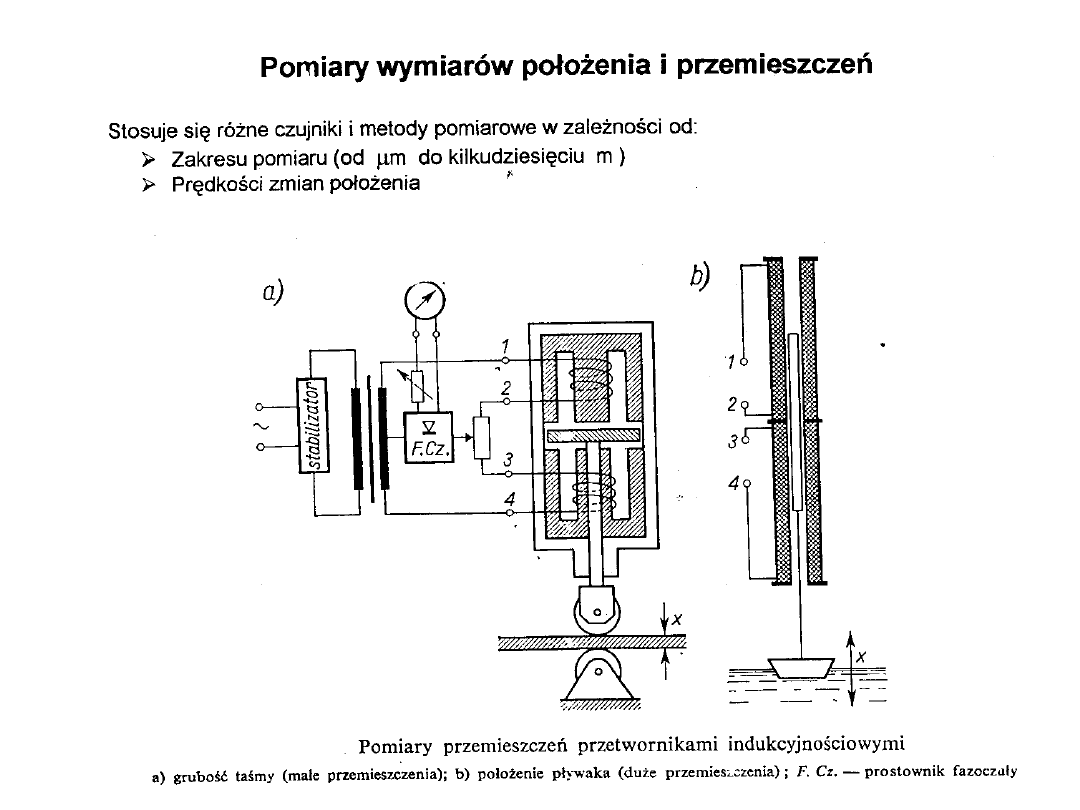
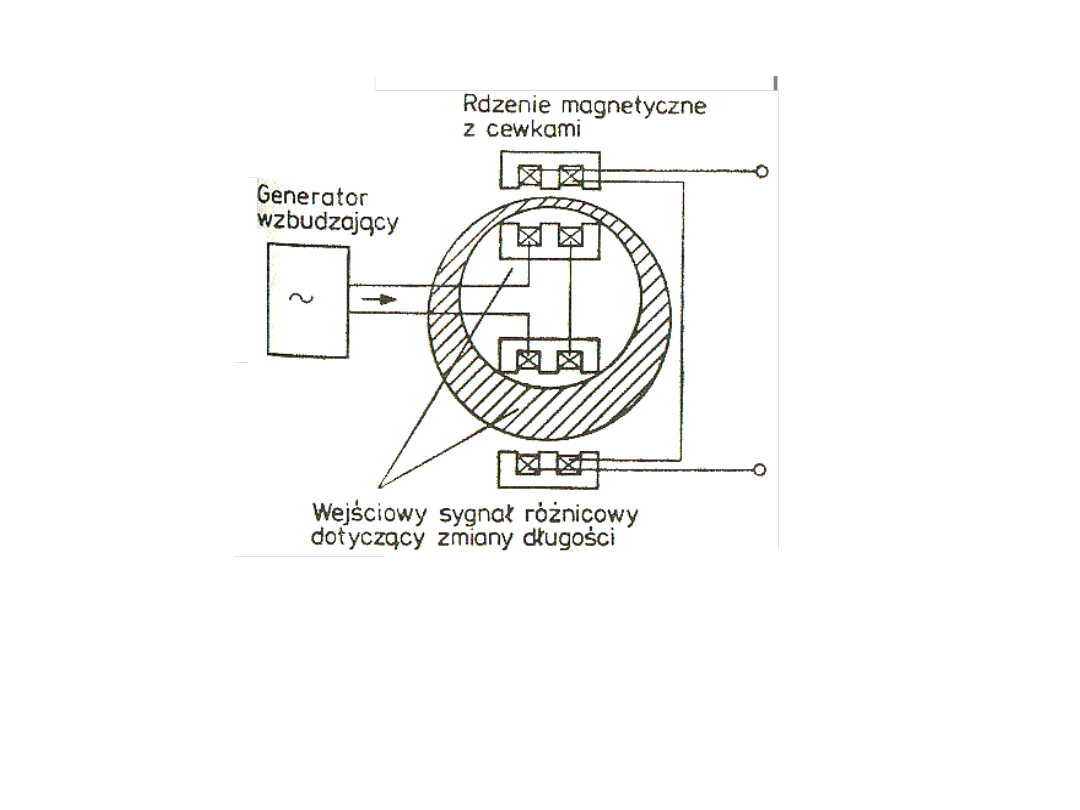
Przetwornik indukcyjny o zmiennej reluktancji
do wyznaczania nierównomierności grubości ścianek
rurociągu
Czujnik do detekcji krawędzi
(np. do zliczania
arkuszy)
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
Wyszukiwarka
Podobne podstrony:
Czujniki i przetworniki przepływu
Czujniki i przetworniki lepkości
Badanie czujnikow i przetwornik Nieznany
Ściąga czujniki, PWR, 7 semestr, Czujniki Przetworniki
Wykł ME pomiary magnetyczne
czujniki i przetworniki new1
Wyznaczanie charakterystyk statycznych czujników światła, sprawozdania PWR, czujniki i przetworniki
Czujniki i przetworniki przepływu
Badanie czujników i przetworników przemysłowych
16 Badanie czujników i przetworników przemysłowych
Czujnik przetwornika magnetycznego na wale korbowym
sprawozdanie badanie czujników i przetworników ciśnienia
4 Podstawy Metrologii przetworniki i czujniki
więcej podobnych podstron