
Pomiary magnetyczne

PPOMIARY MAGNETYCZNE
Pole magnetyczne charakteryzują:
- strumień magnetyczny
- indukcja magnetyczna B
- natężenie pola magnetycznego H
Pomiar strumienia strumieniomierzem (galwanometrem
pełznym)
Zmiana strumienia skojarzonego z cewką o N zwojach
zaindukuje
Wychylenie strumieniomierza proporcjonalne do zmiany
strumienia skojarzonego
t
1
– czas zaniku impulsu napięciowego e
t
N
e
d
d
)
(
d
d
1
1
2
0
2
1
N
N
t
e
c
t
Miarą zmiany strumienia jest zmiana wychylenia (brak
momentu zwrotnego
powoduje nieustalone położenie początkowe wskaźnika).
1
2
c – stała strumieniomierza
[(Wbzw)/dz]
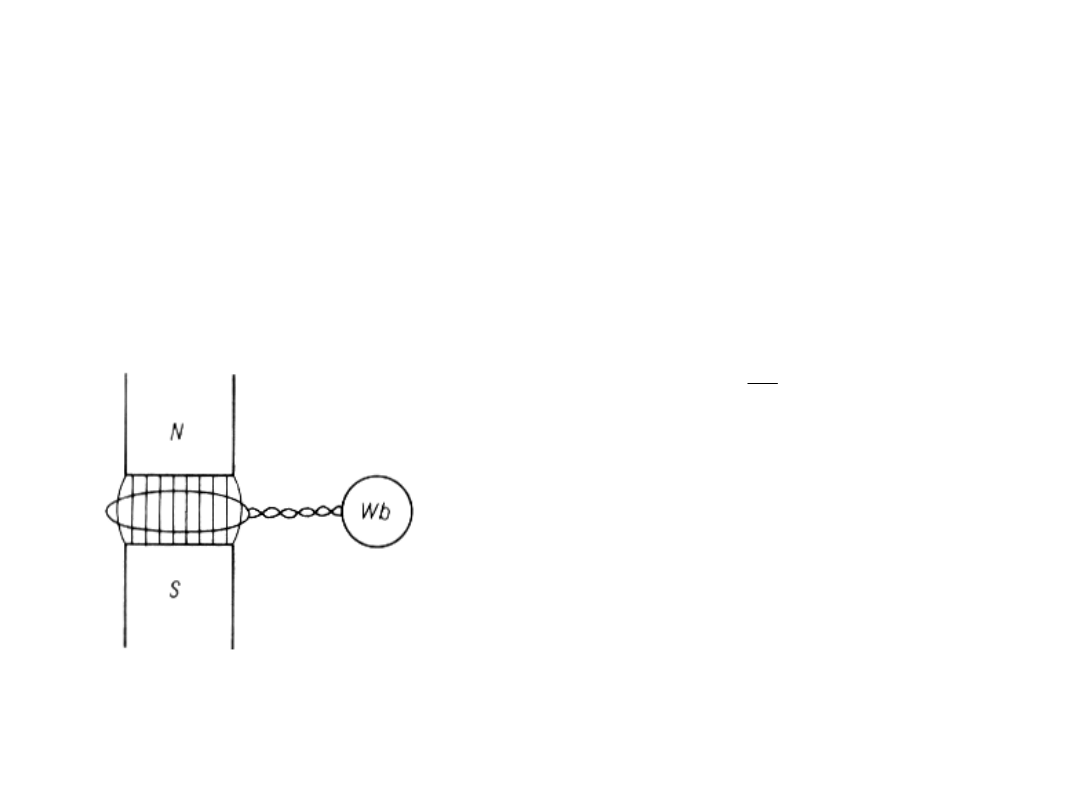
Pomiar strumienia magnetycznego strumieniomierzem
Przykład: pomiar strumienia w szczelinie
magnesu
N
c
0
Pomiary strumienia galwanometrem balistycznym
Galwanometr balistyczny w połączeniu z cewką pomiarową
umożliwia pomiar lub B stałych w czasie.
Zmiana strumienia skojarzonego z cewką indukuje
Pod wpływem e w obwodzie galwanometru popłynie prąd i
N – liczba zwojów cewki; R,L – rezystancja i indukcyjność cewki i
galwanometru łącznie
gdzie: t
1
– chwila rozpoczęcia zmiany strumienia
t
2
– chwila zaniku prądu indukowanego
t
N
e
d
d
t
i
L
iR
t
N
d
d
d
d
i
L
t
Ri
N
d
d
d
2
1
2
1
2
1
d
d
d
t
t
t
t
t
t
i
L
t
i
R
N

0
)
(
1
2
RQ
N
2
1
1
b
C
Q
1
b
RC
RQ
N
1
N
RC
b
S
B
Całka z di wynosi 0 bo i(t
1
) = i(t
1
) = 0
Ładunek Q proporcjonalny do zmiany strumienia
mierzy galw. balistyczny
Pierwsze wychylenie
1
jest proporcjonalne do ładunku
czyli
a więc
z błędem rzędu
2%
Jeśli pole jest jednorodne wewnątrz cewki to również
Pomiar strumienia sinusoidalnego
Strumień sinusoidalny o wartości max.
m
o częstotliwości
f
przenikając cewkę o
N
zwojach pod kątem prostym
indukuje w niej sem. o wartości skutecznej
E
Pomiaru
E
można dokonać woltomierzem
(R
v
R
c
)
gdzie
R
c
– rezyst. cewki
Strumień oblicza się jako
m
N
f
E
44
,
4
N
f
E
m
44
,
4
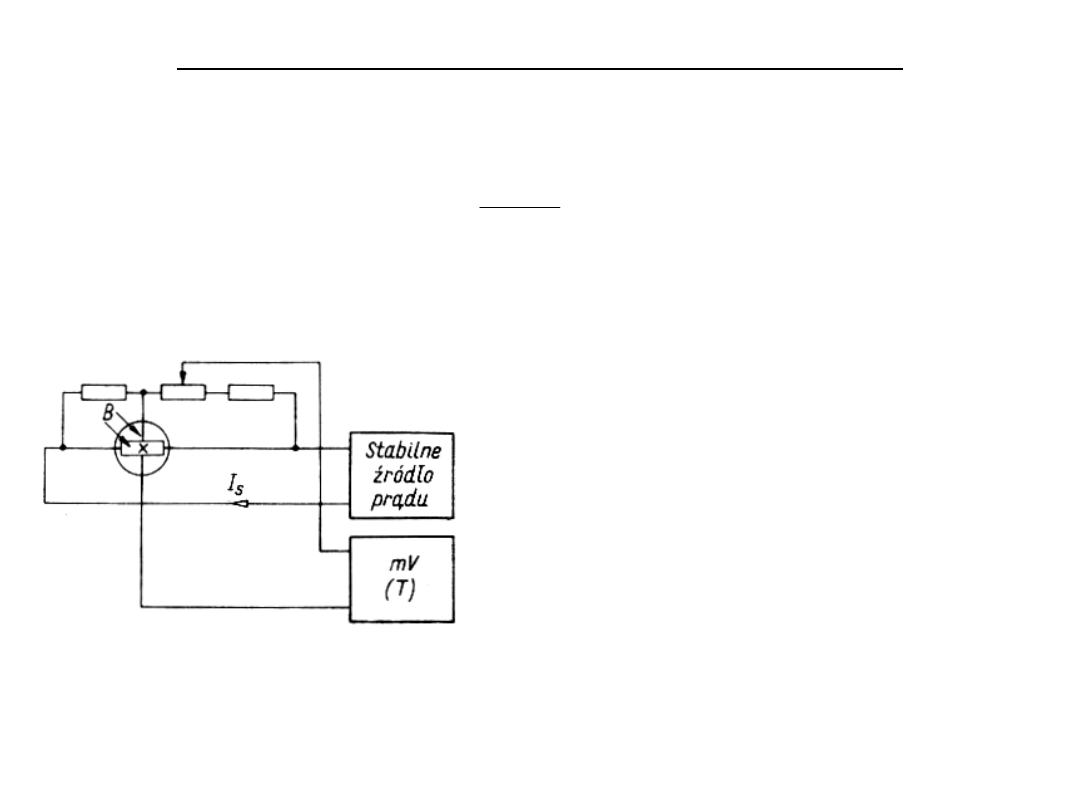
Schemat teslomierza (gausomierza)
hallotronowego
Dla I
S
= const U
H
=
k
B
Pomiary indukcji za pomocą hallotronu
Hallotron przetwarza indukcję magnetyczną
B
na napięcie
Halla
U
H
gdzie:
R
H
– stała Halla (zależna od technologii
wykonania)
I
S
– prąd sterujący
B
– indukcja (prostopadła do płytki
Halla)
d
– grubość płytki
B
d
I
R
U
s
H
H
Teslomierze budowane są dla pól magnetycznych stałych i
sinusoidalnych w zakresach od ok. 10 mT do kilku T i w
klasach 1 – 2,5 (dokładniejsze w wykonaniach specjalnych).
Natężenie pola
określa się met.
absorbcyjną
wyznaczając
częstotliwość
rezonansową wg
max. pochłaniania
energii z pola
zmiennego.
oraz
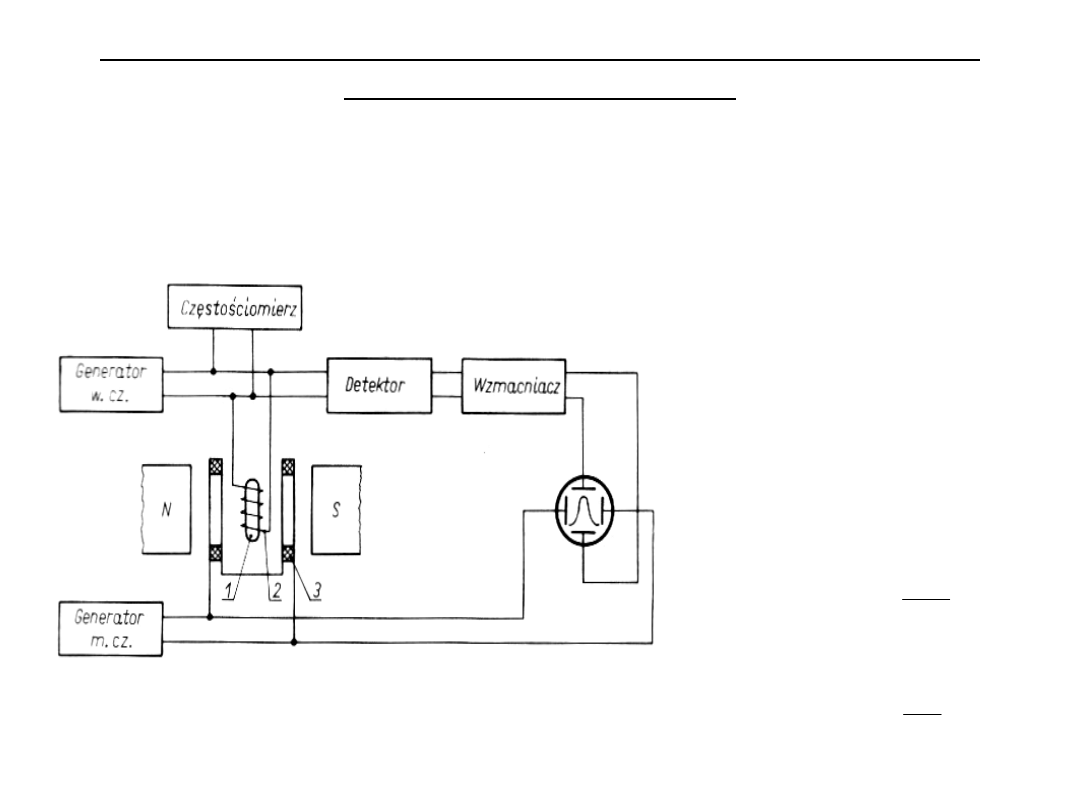
Układ do pomiaru natężenia pola
magnetycznego metodą rezonansu jądrowego;
1 – ampułka z roztworem wodnym, 2 – cewka
w.cz., 3 – cewka m.cz.
Pomiary natężenia pola metodą magnetycznego
rezonansu jądrowego
Jądro atomowe charakteryzuje związek momentu pędu J oraz
momentu magnetycznego m
Dla współczynnika żyromagnetycznego
jest spełnione
Ruchy wirowe jąder wokół linii linii pola zewnętrznego mają
J
m
H
0
0
0
0
H
2
0
f
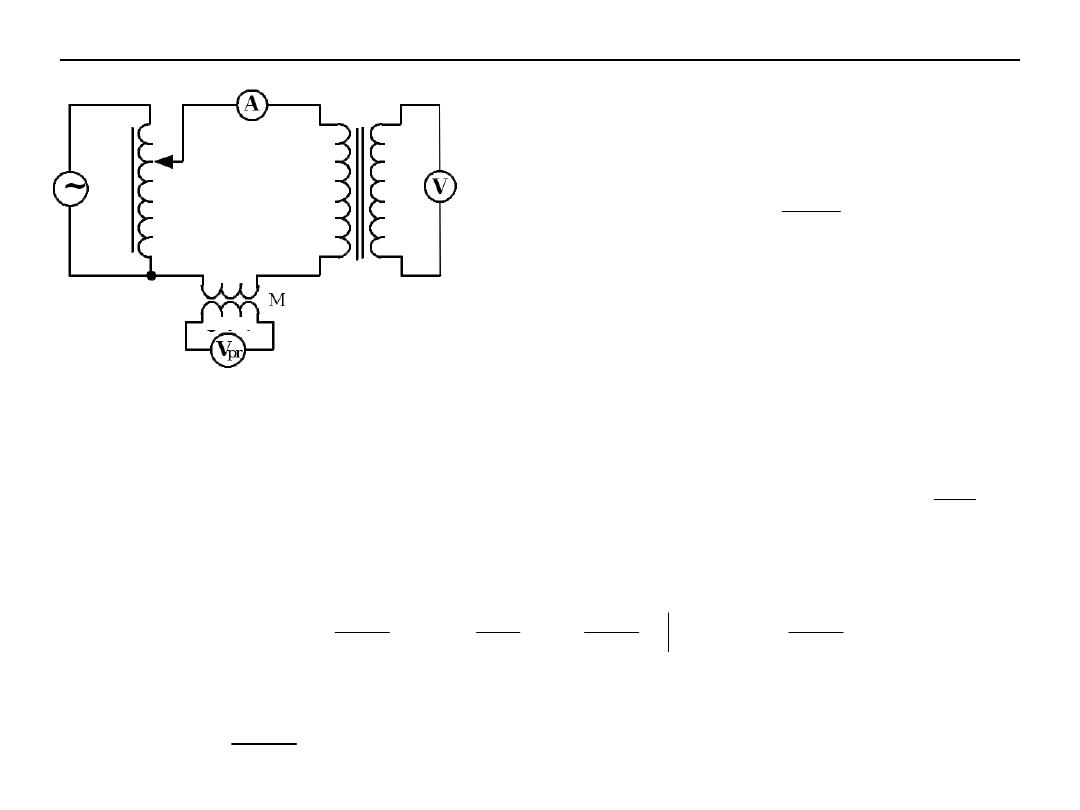
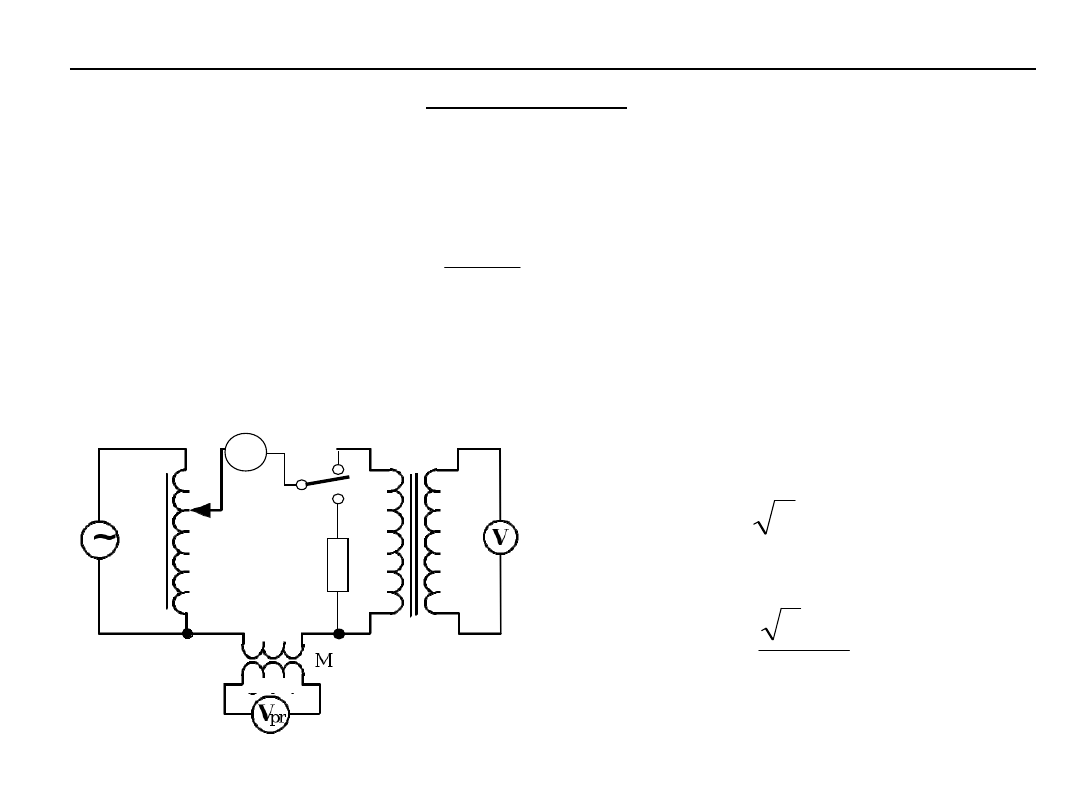
Schemat ukł. do met.
technicznej
Natężenie pola magnetycznego
H
m
przy prądzie zmiennym o
wart. max. I
m
gdzie: N – liczba zwojów
Pomiar indukcji i natężenia pola metodą techniczną
l
N
I
H
m
m
Dla odkształconego prądu magnesującego
Napięcie na uzwojeniu wtórnym transformatora powietrznego
a jego wartość średnia
czyli
gdzie: C
V
– stała pomiaru,
– odchylenie woltomierza
prostownikowego
2
/
T
t
t
I
I
dt
di
M
u
0
2
m
T
t
t
T
t
t
śr
I
T
M
i
T
M
dt
dt
di
T
M
U
0
2
/
0
2
/
0
2
4
2
2
1
1
1
1
V
śr
m
C
Mf
U
I
4
2
0
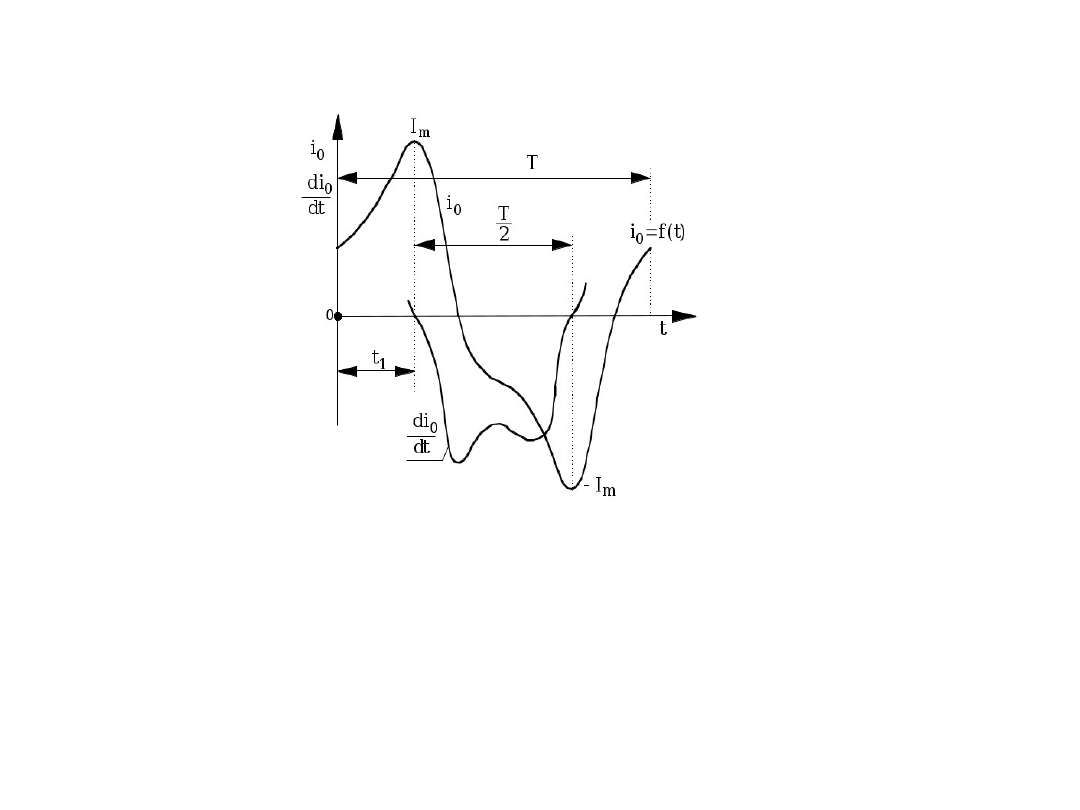
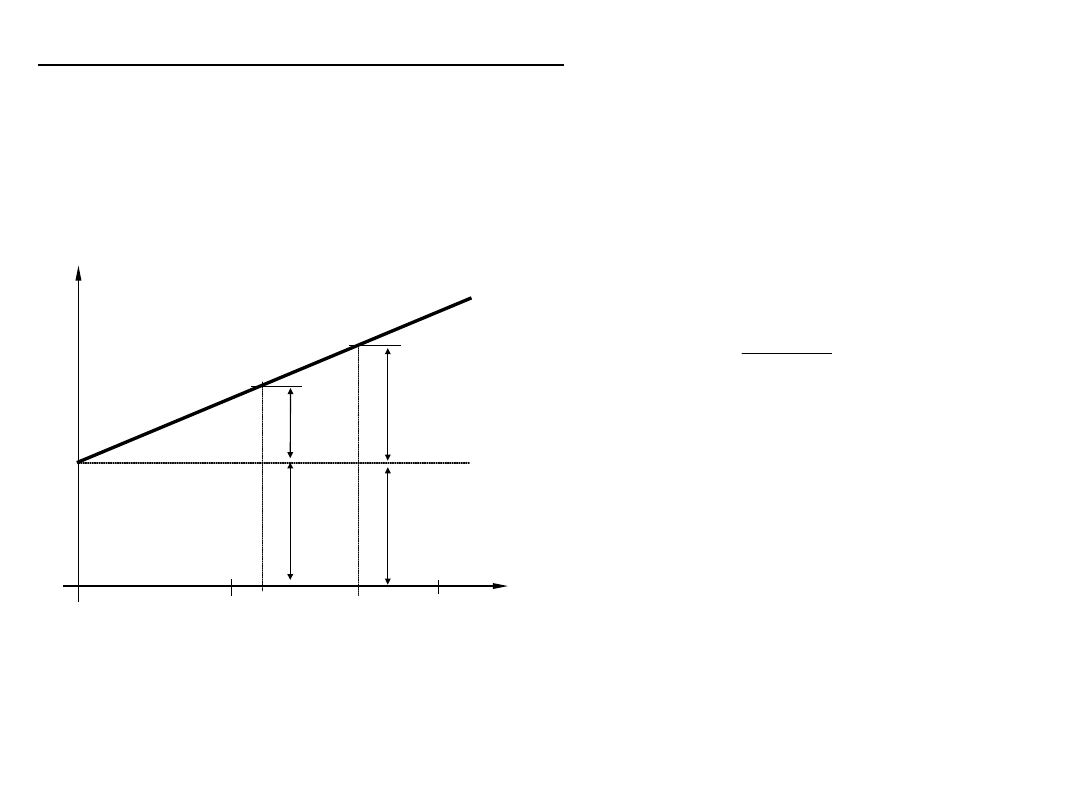
Przebieg prądu magnesującego i jego
pochodnej
Stałą pomiaru C
V
określa się
dla prądu sinusoidalnego o
znanej wartości
I
sk
czyli
Max. wartość indukcji w rdzeniu
V
sk
C
I
I
2
m
sk
V
I
C
2
2
2
44
,
4
N
f
S
E
B
m
.
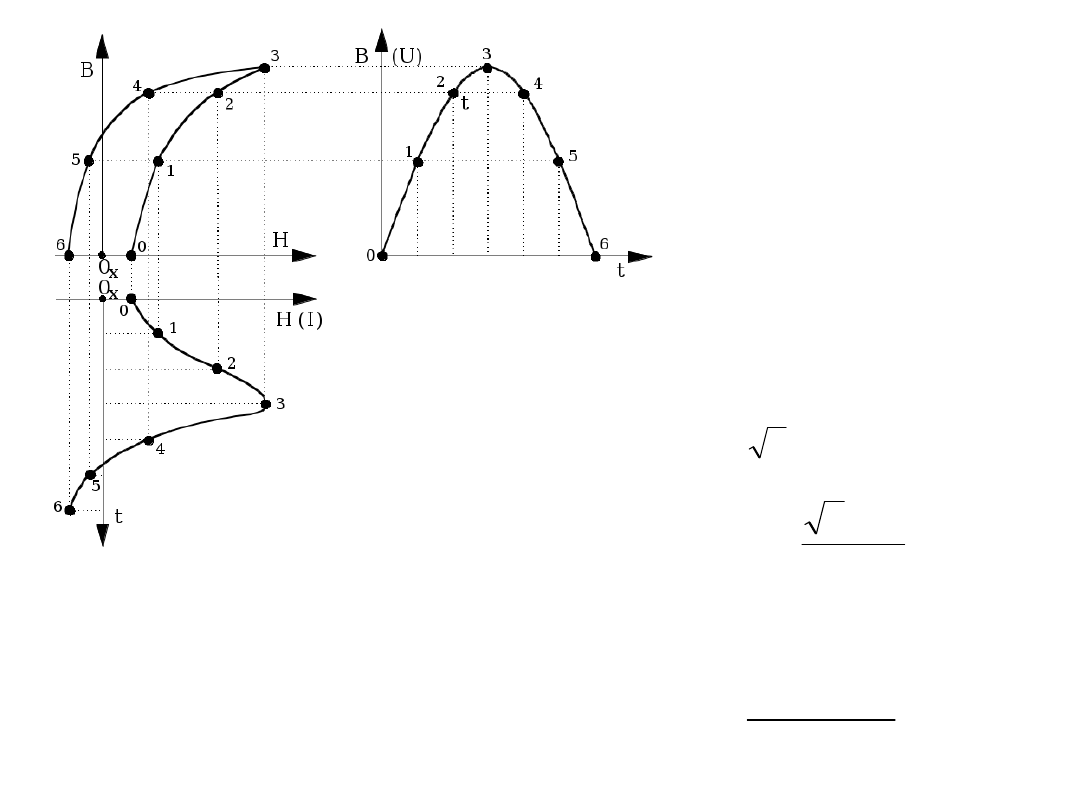
Przebieg prądu magnesującego
przy sinusoidalnie zmiennej
indukcji
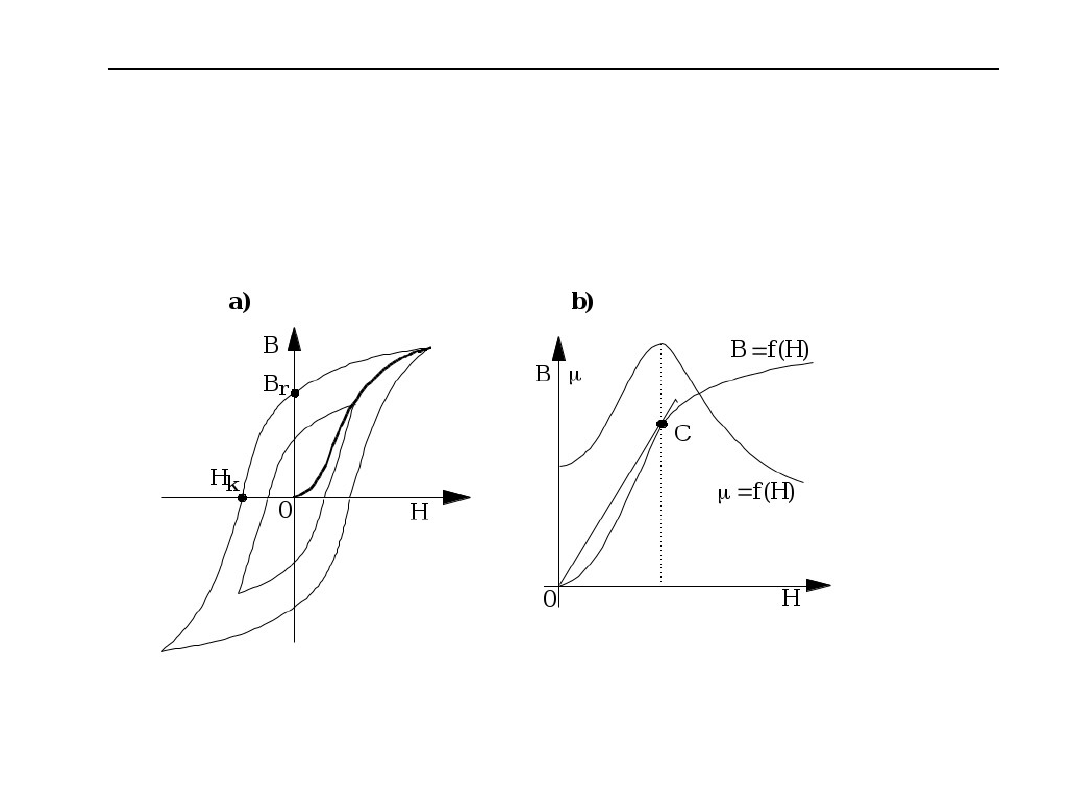
Pomiary właściwości materiałów magnetycznych
Materiały magnetyczne twarde – szeroka pętla histerezy –
stosowane na magnesy
Materiały magnetyczne miękkie – wąska pętla histerezy, duża
przenikalność – stosowane na rdzenie w przemiennym polu
magnetycznym
Zasadnicze charakterystyki magnesowania stali a) obieg histerezy,
b) normalna krzywa magnesowania i normalna przenikalność
magnetyczna
Wyznaczanie krzywej normalnej magnesowania met.
techniczną
Przy zasilaniu napięciem sin. (prąd magnesujący jest
odkształcony)
Wartość max prądu magn. mierzonego przy pomocy
transformatora
powietrznego i woltomierz prostownikowego
gdzie:
C
m
– stała pomiarowa
– wychylenie wolt. prost.
4
2
0
m
śr
m
C
f
M
U
I
Przeł. P w poz. b – skalowanie
prądem sin.
Stała pomiarowa
b
m
I
I
2
b
b
I
Cm
2
A
P
R
b
a
b

Przeł. P w poz. a –
– pomiar prądu odkształconego o wart. max.
I
0m
i współcz.
szczytu
k
sz
0
0
0
I
I
k
α
C
I
m
sz
a
m
m
Dla wyznaczanego punktu krzywej normalnej natężenie pola i
indukcja
gdzie:
N
1
, N
2
– liczba zwojów (I i II)
S, l – parametry próbki magn.
E
2
– sem. na uzw.II (RMS)
f – częstotliwość
2
2
0
1
44
4
N
f
S
,
E
B
l
I
N
H
m
m
m
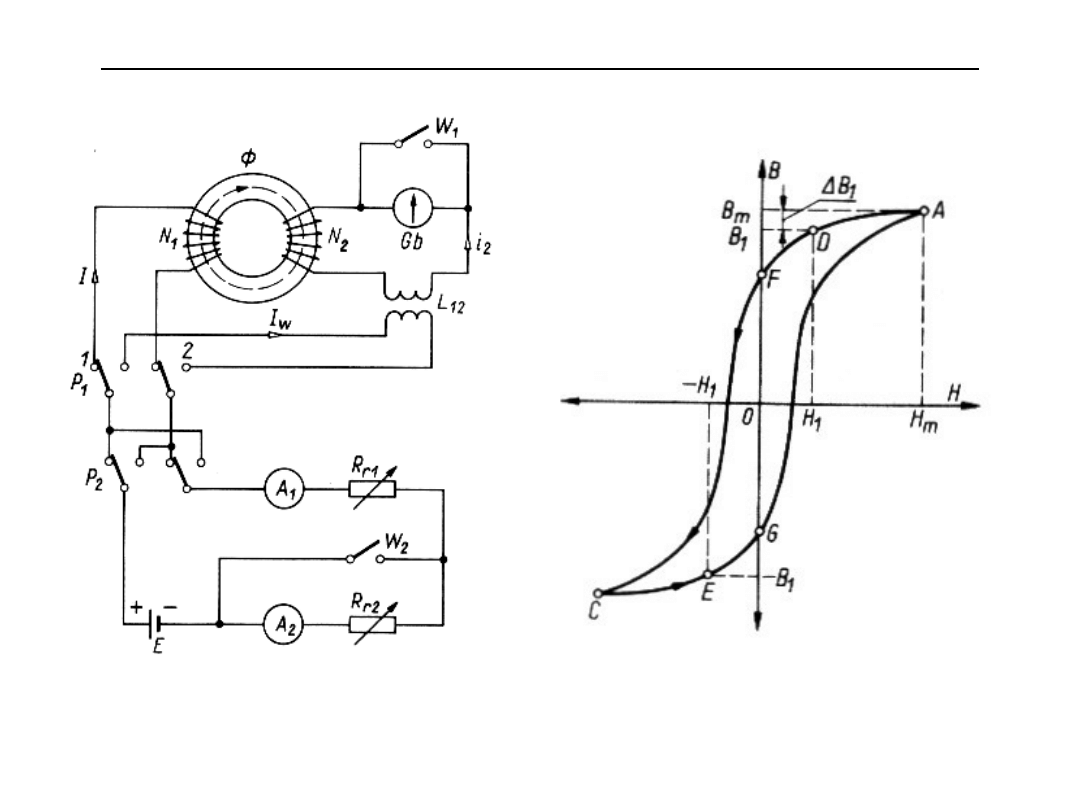
Wyznaczanie pętli histerezy metodą balistyczną
Układ pomiarowy i pętla histerezy wyznaczana metodą balistyczną

Tryb postępowania:
1. Wyznaczenie wierzchołków pętli (H
m
, B
m
) – ustalając I
m
przy zwartym W
2
Ostatnie przełączenie I
m
przy otwartym W
1
powoduje wychylenie
1
(B
m
), z którego
Ustawienie kolejnego punktu, np. (H
1
, B
1
), zmieniając indukcję
B
1
= B
m
– B
1
przez zmianę prądu od I
m
do I
1
(otwierając W
2
i ustawiając R
r2
)
3. Wyznaczenie punktu (H
1
, B
1
) po powrocie do punktu A z
zachowaniem kierunku obiegu na pętli (A-D-F-C-E-G-A). Zmiana
od I
m
do I
1
przy rozwartym W
1
daje odchylenie
1
(B
1
), które
wyznacza
4. Wyznaczenie kolejnych punktów analogicznie jak w p. 2 i 3 dla
prądów I
2
, I
3
...
ustawianych rezystancją R
r2
zmienianą od 0 (dla I
m
) do
wartości max. dla ostatniego punktu.
Uwaga:
Każdorazowo po ustawieniu wartości prądu rezystorem R
r2
należy dla
dokonania pomiaru wrócić do punktu A (jak w p.3).
Każdemu punktowi na pętli odpowiada jego lustrzane odbicie na
drugiej połówce pętli.
)
(
2
1
m
B
m
B
C
B
1
1
1
1
)
1
(
oraz
B
B
B
B
C
B
m
B
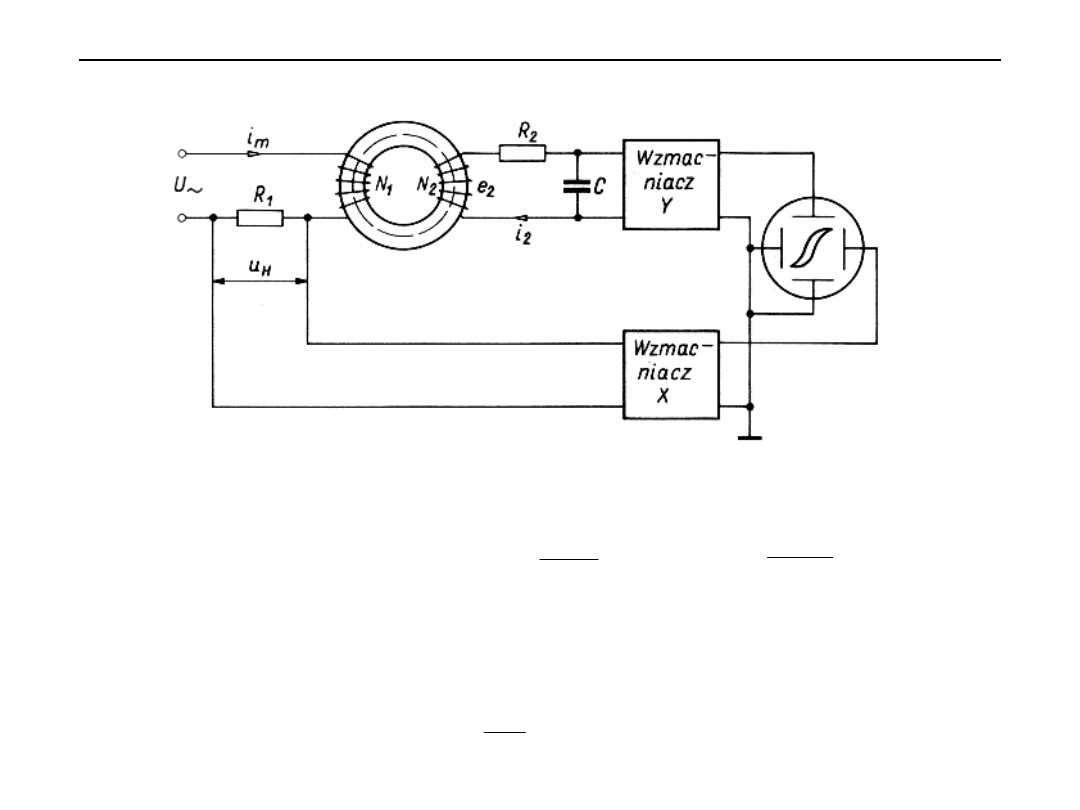
Oscyloskopowa metoda badania ferromagnetyków
Układ do wyznaczania pętli histerezy metodą oscyloskopową
Wartość chwilowa natężenia pola więc
czyli podając na płytki odchylania poziomego spadek napięcia na
R
1
uzyskuje się odchylenie w osi X proporcjonalne do natężenia
pola H( t ) (ze stałą pomiarową k
H
) bo
l
N
i
t
H
m 1
)
(
1
)
(
N
l
t
H
i
m
)
(
)
(
1
1
1
t
H
k
t
H
N
R
l
R
i
u
H
m
H
Napięcie e
2
indukowane na N
2
jest proporcjonalne do pochodnej
indukcji bo
czyli
Aby uzyskać napięcie proporcjonalne do B należy scałkować e
2
w układzie R
2
C
Napięcie na kondensatorze układu RC opisuje zależność
a więc dla czyli
skąd
,
Układ całkujący powinien mieć możliwie dużą impedancję
wejściową, aby prąd i
2
praktycznie nie obciążał uzwojeń próbki.
t
N
e
d
d
2
2
t
B
S
N
e
d
d
2
2
t
i
C
u
C
d
1
C
R
1
2
2
2
2
R
e
i
t
t
t
B
S
N
C
R
t
R
e
C
t
i
C
u
B
d
d
)
(
d
1
d
1
d
1
2
2
2
2
2
)
(
)
(
2
2
t
B
k
t
B
C
R
S
N
u
B
B
PPomiar stratności magnetycznej blach stalowych
Przy zasilaniu urządzeń prądem przemiennym w
ferromagnetykach
występują
straty
na
histerezę
(od
przemagnesowywania rdzenia) i prądy wirowe.
Stratność – straty mocy w przemagnesowywanym rdzeniu
odniesione do jego masy.
Warunki odniesienia przy wyznaczaniu stratności: f = 50
Hz,
grubość blachy d = 0,5 mm, indukcja sinusoidalna o
wartości max. B = 1 T
W innych warunkach
Stratność bada się zazwyczaj w znormalizowanym aparacie
Epsteina przy czym wartość indukcji wyznacza się w sposób
pośredni na podstawie wartości skutecznej napięcia indukowanego
w uzwojeniu wtórnym aparatu Epsteina.
Przy sinusoidalnej indukcji w próbce
k współcz. kształtu (stosunek wart. skutecznej do średniej). Dla
sin. k = 1,11.
k
n
współcz. niejednorodności. Dla B = 1 T zwykle k
n
= 1,02 a
dla B = 1,5 T k
n
= 1,025
S przekrój wiązki blach
N
– liczba zwojów uzw. wtórnego
w
h
p
p
m
P
p
2
2
50
5
,
0
50
B
f
d
k
p
B
f
k
p
w
w
h
h
N
f
S
B
k
k
E
n
4
W
1
N
1
W
Hz
V
1
A
V
2
V
3
N
2
W
2
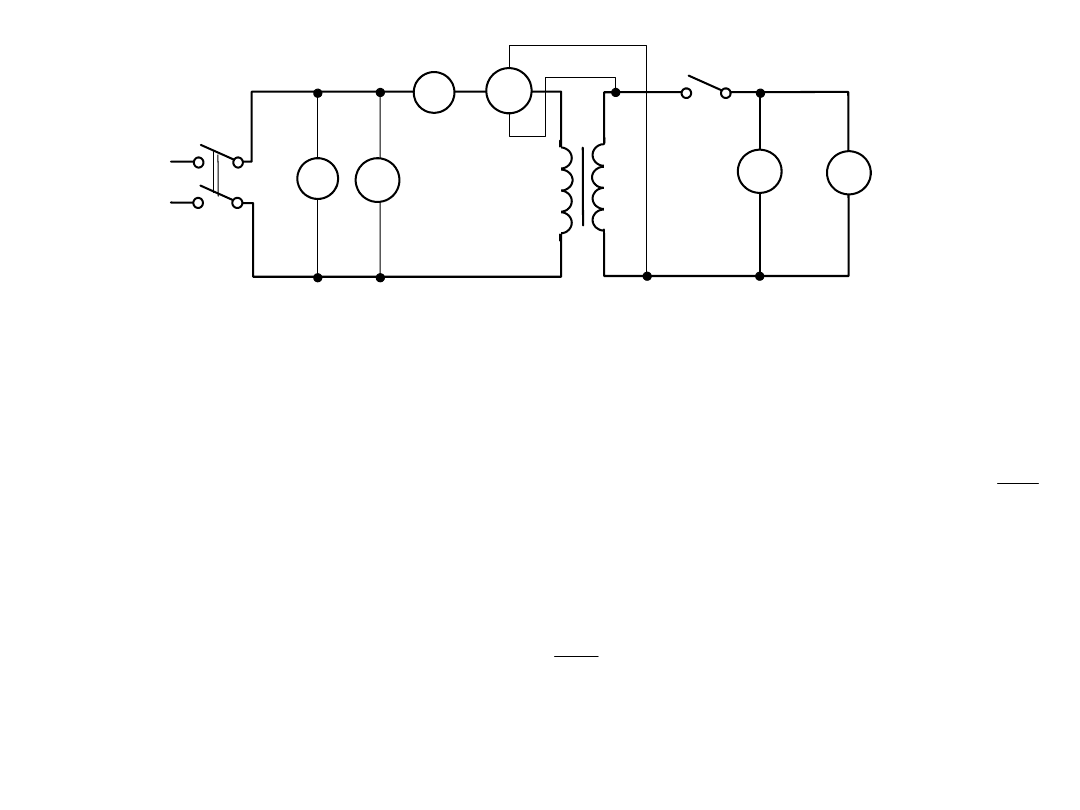
Schemat układu do pomiaru stratności aparatem Epsteina
gdzie: N1, N2 uzwojenie aparatu Epsteina; W watomierz
( cos
n = 0,2 ÷ 0,5 ); V1,V2 woltomierze wartości skutecznej;
V3 woltomierz wart. średniej wyskalowany w wart. Skutecznych dla
sygnału sinusoidalnego
Układ zasila się napięciem sin. (
k =
1,11 1% )
.
Przy
zniekształceniach
Cewka napięciowa włączona jest w uzw. wtórne aby
wyeliminować straty w miedzi uzw. pierwotnego. Mierząc moc
przy otwartym W
2
gdzie: P
w
– wskazanie watomierza, R
cn
– rezystancja cewki napięciowej,
E – sem ( E = U
2
)
3
2
11
,
1
U
U
k
cn
w
p
R
E
P
P
2
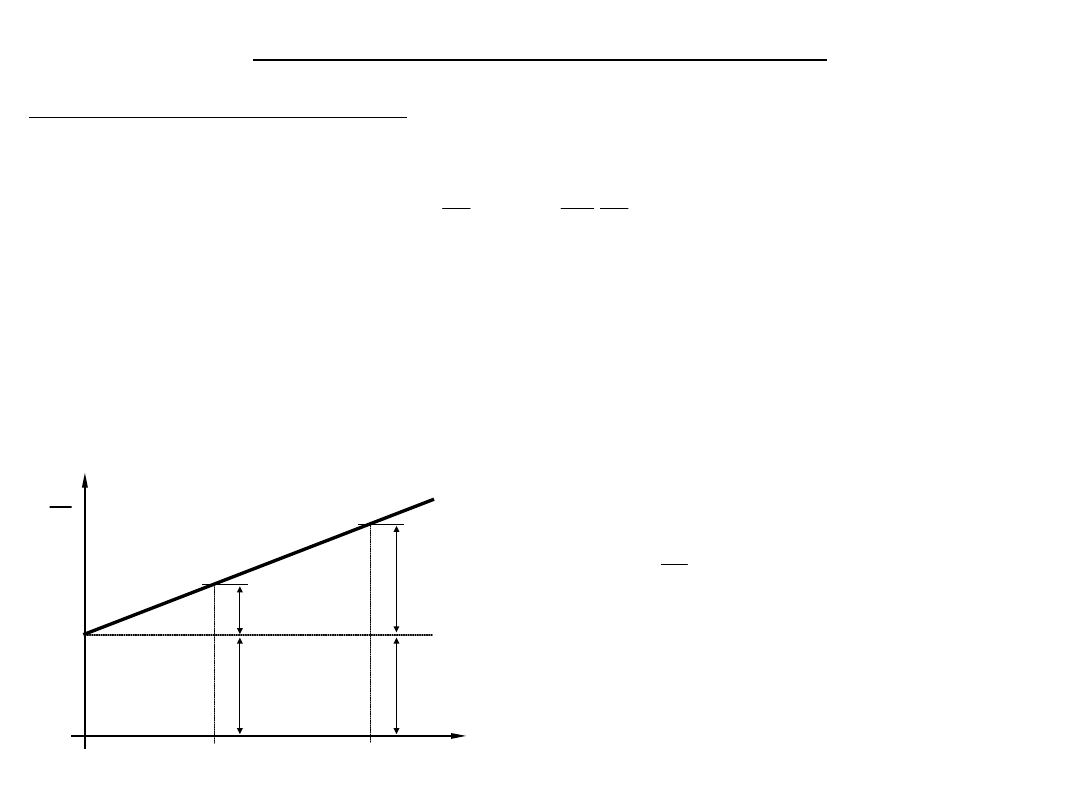
Rozdział strat magnetycznych
Metoda częstotliwościowa
Stratność na histerezę i prądy wirowe w różny sposób zależy od
częstotliwości
2
2
2
50
5
,
0
50
f
b
f
a
f
d
B
k
f
B
k
p
p
p
w
h
w
h
dokonując pomiarów dla dwóch częstotliwości
2
2
2
2
2
1
1
1
i
f
b
f
a
p
f
b
f
a
p
Z układu równań można wyznaczyć współcz. a i b (dla większej ilości
pomiarów met. regresji).
a
a
b f
1
b
f
2
f
1
f
2
f
B
=
const
k
=
1,11
f
p
Stratność na jeden okres
f
b
a
f
p
Rozdział stratności dla dwóch
różnych częstotliwości
Metoda współczynnika kształtu
Przy stałej indukcji straty na histerezę nie zależą od wsp. kształtu a
straty na prądy wirowe są proporcjonalne do kwadratu tego
współczynnika (w zakresie k = 1,111,27)
Wyznaczając straty całkowite dla dwóch wartości wsp. kształtu
sem ( E = U
2
)
a zatem
czyli ostatecznie
Zmiana wsp. k – przez zmianę R w obw. pierwotnym (lub
wprowaczenie źródła
harmonicznych)
p
h
p
w2
p
h
p
w1
B
=
const
f
=
const
p
1
2
2
2
2
2
1
1
i
k
c
p
p
k
c
p
p
h
h
2
2
2
1
2
1
k
k
p
p
c
2
k
w
k
c
p


Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
Wyszukiwarka
Podobne podstrony:
Kompleksowa interpretacja pomiarów magnetycznych i elektrooporowych nad intruzjami diabazów w Miękin
Kompleksowa interpretacja pomiarów magnetycznych i elektrooporowych nad intruzjami diabazów w Miękin
Wykł ME Czujniki przetw 2
Pomiar podstawowych wielkości magnetycznych v4
Pomiar stosunku em metodą odchyleń w polu magnetycznym2
Pomiar podstawowych wartości magnetycznych
Pomiar podstawowych wartości magnetycznych v2
Pomiar podstawowych wartości magnetycznych v5
Pomiar podstawowych wielkości magnetycznych5
Pomiar podstawowych wielkości magnetycznych v7
Metoda magnetronowa 2, TABELA POMIAROWA
Metrologia-lab-Pomiar strumienia magnetycznego oraz indukcji magnetycznej, Strumień1SPR, POLITECHNIK
37, REAL 37, Galwanometr jest elektrycznym przyrz˙dem pomiarowym, najcz˙˙ciej magnetoelektrycznym,
Pomiar stosunku e-m metodą odchyleń w polu magnetycznym, FZZ206, 206
Pomiar stosunku e-m metodą odchyleń w polu magnetycznym, FZZ206, 206
więcej podobnych podstron