1
MSI-w7/1
Metody sztucznej inteligencji
Politechnika Śląska
Katedra Podstaw Konstrukcji Maszyn
Rok akademicki 2003/2004
Wykład 7, AiR
Elementy robotyki
Prof. dr hab. Wojciech Moczulski
Materiały dydaktyczne (na prawach rękopisu)
dla studentów Wydziału Mechanicznego Technologicznego
Wszystkie ilustracje pochodzą z S. Russel, P. Norvig, Artificial
Intelligence - A modern approach, Prentice Hall, 1995
MSI-w7/2
Pojęcie robota
• Robot to aktywny i sztuczny agent, którego
środowiskiem jest realnie istniejący świat
• Jeśli przyjąć taką definicję, nie jest robotem:
– Kawał skały
– Zwierzę
– Program komputerowy (
→
softbot
)
• Szczególnym przedmiotem zainteresowania będą
roboty autonomiczne
, podejmujące
samodzielnie
decyzje
, bazując na
sprzężeniu z otoczeniem
poprzez
posiadane sensory
MSI-w7/3
Rzeczywisty świat robota (1)
• Niedostępny
– Czujniki niedoskonałe
– Robot może zwykle postrzegać bodźce ze swojego
bliskiego sąsiedztwa
• Niedeterministyczny
– Koła mogą się ślizgać po podłożu
– Akumulatory mogą się rozładować
– Elementy mogą się uszkodzić
– Nie wiadomo, czy dana akcja zakończy się sukcesem
MSI-w7/4
Rzeczywisty świat robota (2)
• Nieepizodyczny
– Wyniki akcji zmieniają się w czasie
– Robot musi rozwiązywać sekwencyjne problemy
decyzyjne i uczyć się
• Dynamiczny
– Co jest lepsze: długo się zastanawiać, czy działać
natychmiast
• Ciągły
– Nieskończenie wiele stanów
– Wymaga modyfikacji algorytmów przeszukiwania i/lub
planowania
MSI-w7/5
Zakres wykładu
• Zadania
, do których realizacji roboty się
nadają
• Niektóre specjalne
układy wykonawcze
(efektory) i
sensory
• Architektura robota
jako autonomicznego
agenta
• Wybór akcji
w ciągłej przestrzeni stanów
MSI-w7/6
Zadania wykonywane przez
roboty (1)
• Procesy wytwórcze
– Tradycyjna dziedzina zastosowania
– W 1985 r 180 000 robotów (150 000 w J, USA, F)
– Przemysł samochodowy, mikroelektronika, ...
– Przemieszczają obiekty o masie do 1 [t] z dokładnością do
2.5 [mm] w przestrzeni roboczej o R=10 [m] (1995 r.)
– Bardzo ograniczone możliwości odczuwania i adaptacji
(proste maszyny najlepiej realizują proste zadania)
– Roboty autonomiczne wciąż walczą o akceptację
2
MSI-w7/7
Zadania wykonywane przez
roboty (2)
• Gospodarka materiałowa
– Magazynowanie, transport i dostarczanie
– Różne wielkości i masy
– AGV=autonomous guided vehicle
– Wyzwanie przyszłości: obchodzenie się z
żywnością (różne wielkości, kształty, tekstury, )
• Inne
- np. strzyżenie owiec w Australii (140
mln owiec!!)
MSI-w7/8
Zadania wykonywane przez
roboty (3)
• Zadania wymagające mobilności
– Kurierzy (szpitale, biura, poczta)
– Straż bezpieczeństwa
– AUV=autonomous underwater vehicle
MSI-w7/9
Zadania wykonywane przez
roboty (4)
• Niebezpieczne środowisko
– Księżyc, planety i przestrzeń międzyplanetarna
– Środowisko radioaktywne, naprawy w reaktorach
– Naprawy instalacji chemicznych, kotłów
parowych itp.
– Zwykle operowane przez człowieka
– Często posiadają pewną autonomię (zbyt długie
opóźnienia w odpowiedzi operatora - np. Mars)
MSI-w7/10
Zadania wykonywane przez
roboty (5)
• Zdalna obecność
– Robot przedłużeniem organów i zmysłów
człowieka (prace na dnie oceanu, rozbrajanie
bomb)
– Roboty militarne (samoloty, szpiegi, ...)
• Zwiększenie możliwości człowieka
– Zastąpienie amputowanych organów
– Siatkówka, zmysł dotyku
MSI-w7/11
Najważniejsze podzespoły
• Robot ma:
– Sztywny
korpus
(body)
– Więzy
(links) [sztywne]
– Połączenia
(joints)
– Końcowe elementy wykonawcze
(end effectors)
stosowane do oddziaływania na środowisko
MSI-w7/12
Elementy wykonawcze
• Oddziałują na środowisko
pod kontrolą układu
sterowania robota
• Wyposażone w
siłowniki/serwomechanizmy
(jeden
dla każdego stopnia swobody) zamieniające
komendy programowe w fizyczny ruch
• Stosowane do:
– Zmiany pozycji robota (
lokomocja
)
– Przemieszczania innych obiektów w środowisku
(
manipulacja
)
3
MSI-w7/13
Lokomocja
• Roboty kroczące
• Roboty jeżdżące
MSI-w7/14
Lokomocja - roboty kroczące
• Stateczne statycznie:
• Można zatrzymać w
każdej chwili (nie
upadną)
• Bardzo wolne
przemieszczanie się
• Zużywają
nieefektywnie energię
• Stateczne dynamicznie
• Skaczące
MSI-w7/15
Lokomocja - roboty jeżdżące (1)
• Podwozie kołowe, gąsienicowe, ...
• Proste w budowie
• Bardziej efektywne niż nogi
• Podparcie statyczne
• Łatwiejsze do sterowania
MSI-w7/16
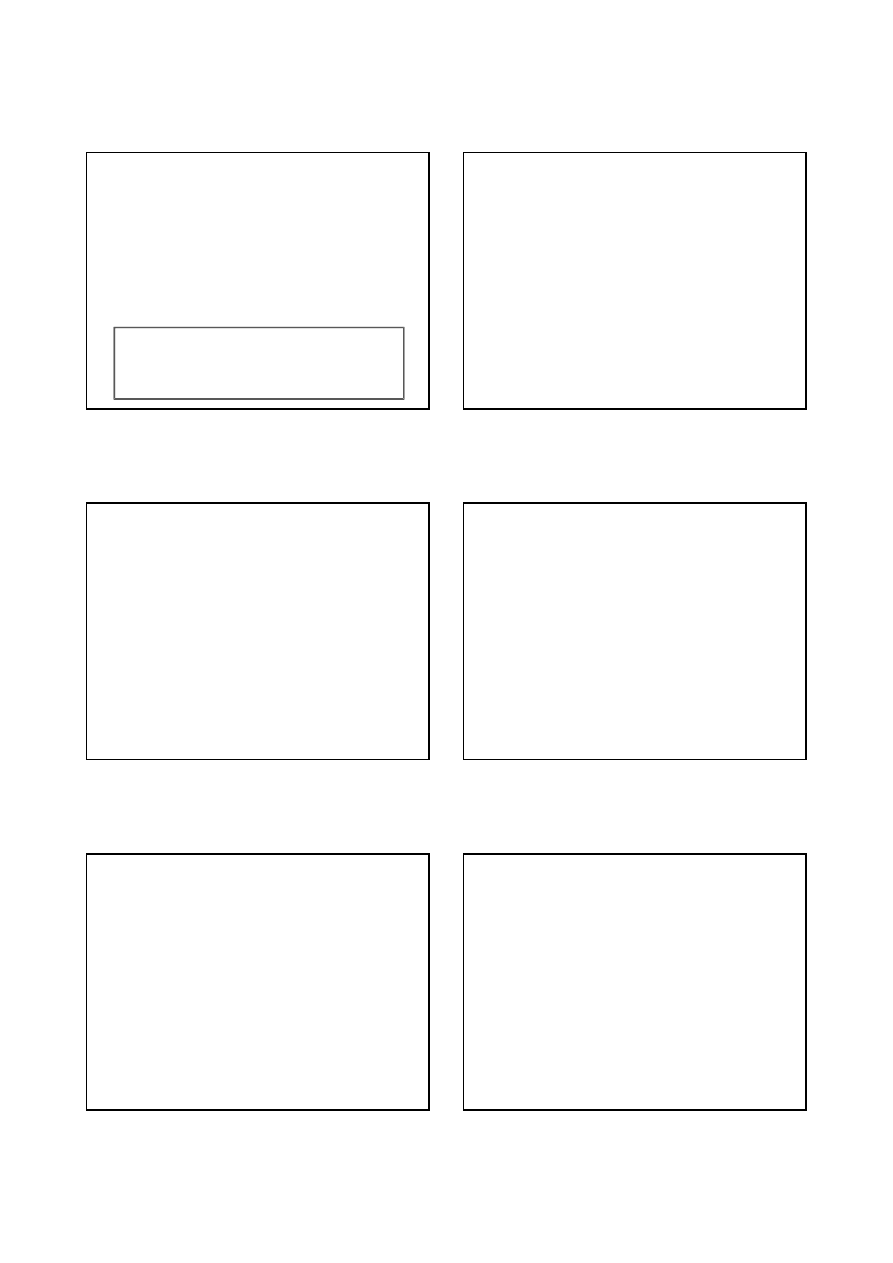
Lokomocja - roboty jeżdżące (2)
Robot na podwoziu 4-
kołowym ma 3 stopnie
swobody (pozycja x-y,
kierunek), lecz w małej
skali tylko 2!!
MSI-w7/17
Lokomocja - roboty jeżdżące (3)
• Roboty
holonomiczne (układ bez poślizgu)
– Liczba stopni swobody równa sterowalnej liczbie
stopni swobody
– Budowa możliwa, lecz nieopłacalna
• Roboty
nieholonomiczne (auto z przyczepami)
– Im większa różnica w liczbie stopni swobody, tym
trudniej sterować
– Dużo prostsze z punktu widzenia układu
mechanicznego
MSI-w7/18
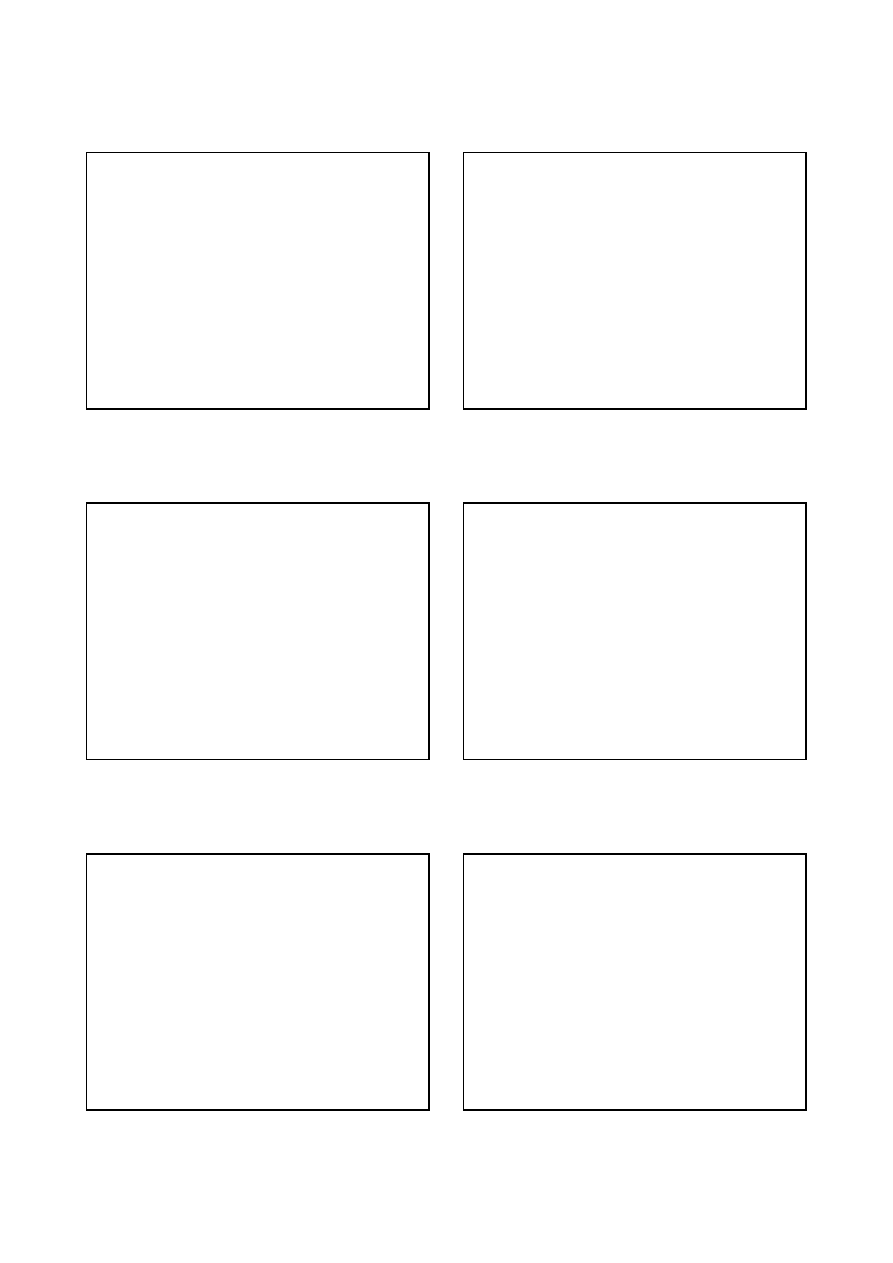
Manipulowanie (1)
• Realizowane przez
manipulatory
• Większość manipulatorów wykonuje
– albo
ruch obrotowy
(R)
– albo
ruch postępowy
(P)
4
MSI-w7/19
Manipulowanie (2)
MSI-w7/20
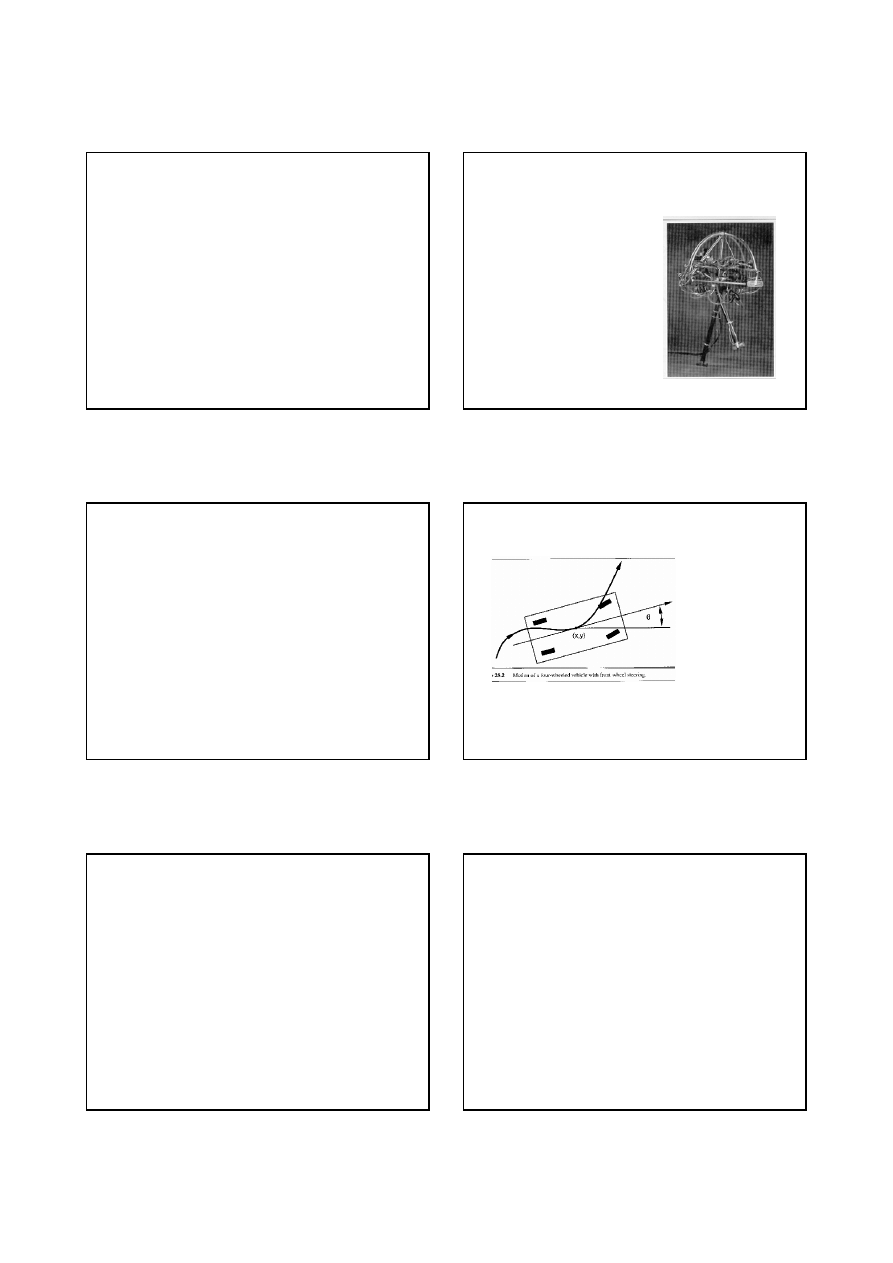
Manipulowanie (3)
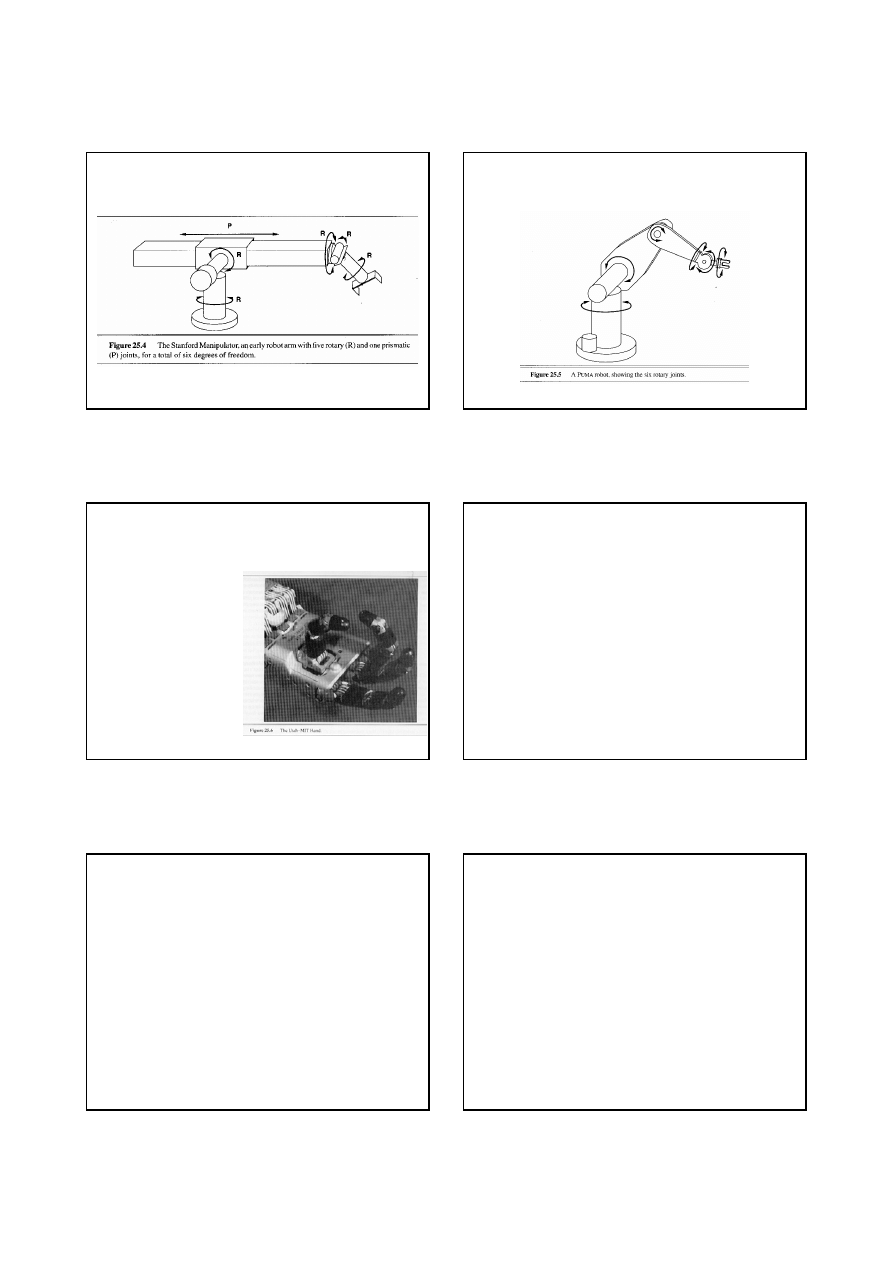
MSI-w7/21
Manipulowanie:
Końcowy mechanizm wykonawczy
• Oddziaływuje
bezpośrednio na
obiekty otoczenia
• Narzędzia
:
– Śrubokręt
– Automat spawalniczy
– Pistolet malarski
– . . .
• Chwytaki
MSI-w7/22
Sensory: Identyfikacja stanu robota
• Do określania położenia więzów:
– Stosowane kodery (encoder)
– Dużo większa dokładność niż w przypadku
człowieka
• Do określania zmiany położenia robota
mobilnego:
– Odometria (pomiar obrotu koła;
poślizgi
!!)
– GPS
MSI-w7/23
Pomiar siły
• Stosuje się czujniki siły
• Pomiar dla 6 stopni swobody, pomiędzy
manipulatorem a końcowym układem
wykonawczym
• Umożliwia ruch wzdłuż powierzchni przy
utrzymaniu kontaktu ze stałym naciskiem
(compliant motion)
MSI-w7/24
Odczuwanie dotyku
• „Palce” z elastycznego materiału
• Dokonywany pomiar ugięcia (przez macierz
czujników)
• Dotyk określany metodami podobnymi do
rozpoznawania obrazów
5
MSI-w7/25
Sonar
• SOund Navigation and Ranging = nawigacja
i określanie zasięgu za pomocą dźwięku
• Dostarcza użytecznej informacji o obiektach
bardzo blisko robota
• Umożliwia awaryjne zapobieżenie kolizjom
• Efektywny w przypadku omijania przeszkód
• Mało przydatny do opracowywania mapy
(szeroka wiązka dźwięku)
MSI-w7/26
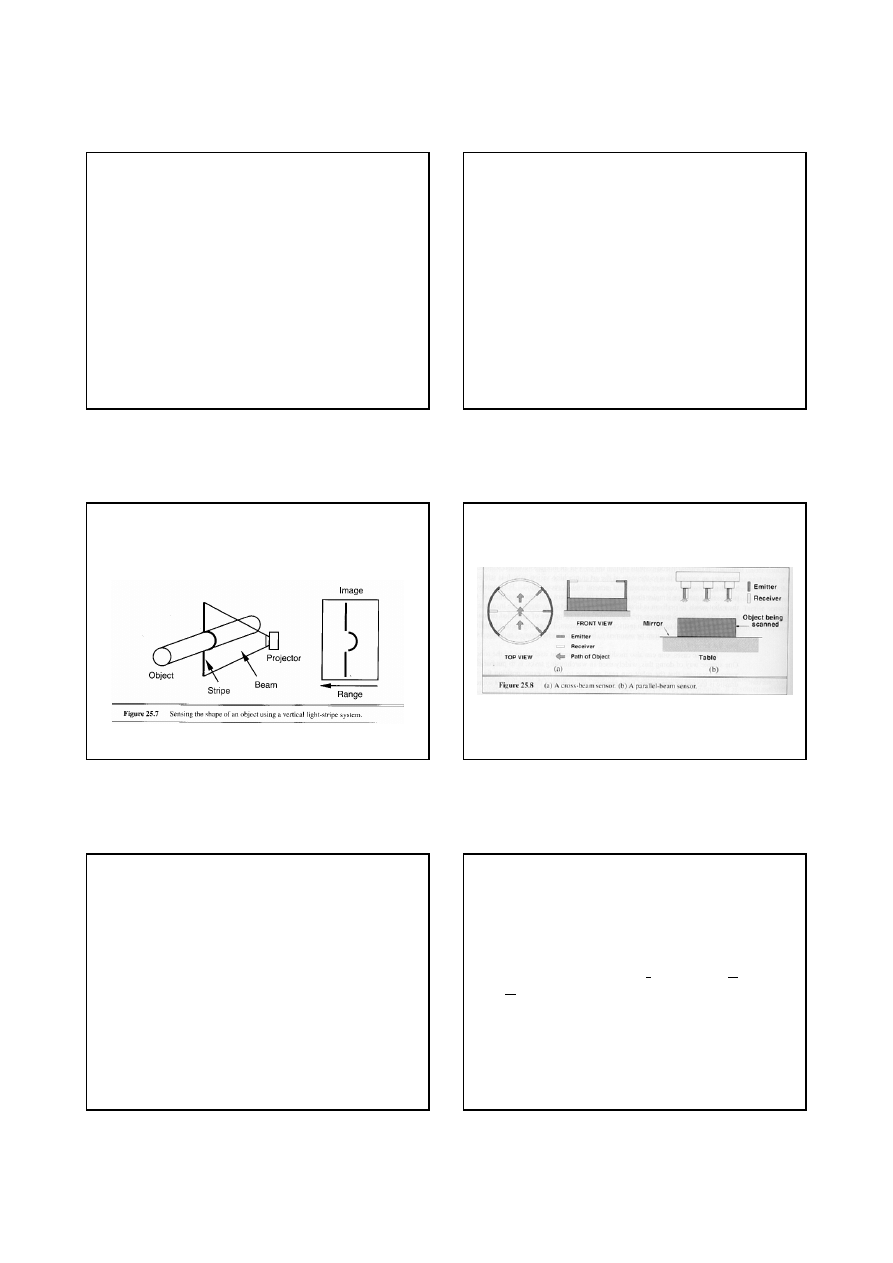
Sensory i systemy wizyjne (1)
• Systemy wizyjne ogólnego przeznaczenia mają
nadal
bardzo ograniczone możliwości
• Skuteczne systemy wizyjne budowane są
gdy jest
ograniczona lista zadań
, które ma wykonywać robot
(np. zakłada się, że przeszkody są płaskie),
• Robot może oświetlać otoczenie światłem o
określonej długości fali (podczerwień, ...)
• Specjalne systemy czujników
mogą być stosowane
do dokładnych pomiarów geometrii obiektów
MSI-w7/27
Sensory i systemy wizyjne (2)
MSI-w7/28
Sensory i systemy wizyjne (3)
MSI-w7/29
Architektury robotów
• Określają sposób organizacji działań,
mających na celu
określanie akcji na
podstawie percepcji
• Podobne do problemu projektowania agenta
w najtrudniejszym wariancie (ze względu
na własności środowiska):
– Duża objętość danych wejściowych
– Potrzeba szybkiej reakcji w niektórych
sytuacjach
MSI-w7/30
Architektura klasyczna
• Poszukiwanie ścieżek i przemieszczanie robota
realizowano przez podprogramy
działań
pośredniego poziomu
(Intermediate-Level
Action=
ILA
)
• ILA składa się ze złożonych procedur
działań
niskiego poziomu
(Low-Level Action=
LLA
)
do sterowania układem robota
• Do planowania zastosowano algorytm
STRIPS
6
MSI-w7/31
Architektura klasyczna: Przykład
• (ILA): przemieść robota z miejsca X do miejsca Y
– (LLA): zaplanuj ścieżkę stosując algorytm A*
– (LLA): przemieść robota wzdłuż zaplanowanej ścieżki,
korygując tę ścieżkę podczas ruchu
– (LLA): zaktualizuj wewnętrzny model świata
– (LLA): gdy rośnie niepewność położenia, wyślij rozkaz
do systemu wizyjnego w celu określenia nowej pozycji
robota
• System ILA/LLA zapewniał stosunkowo jasny i
niezawodny ciąg akcji dla systemu planowania
MSI-w7/32
System planowania
• Działa wg algorytmu STREPS
• Układ dowodzenia twierdzeń
efektywnie
generujący
sekwencje akcji
• Wyniki planowania kompilowane w
ogólne
makro-operatory
(CBR - ułatwia rozwiązanie
podobnych problemów w przyszłości)
• Realizuje
najkrótszą podsekwencję planu
prowadzącą do celu
i której warunki wstępne są
spełnione
MSI-w7/33
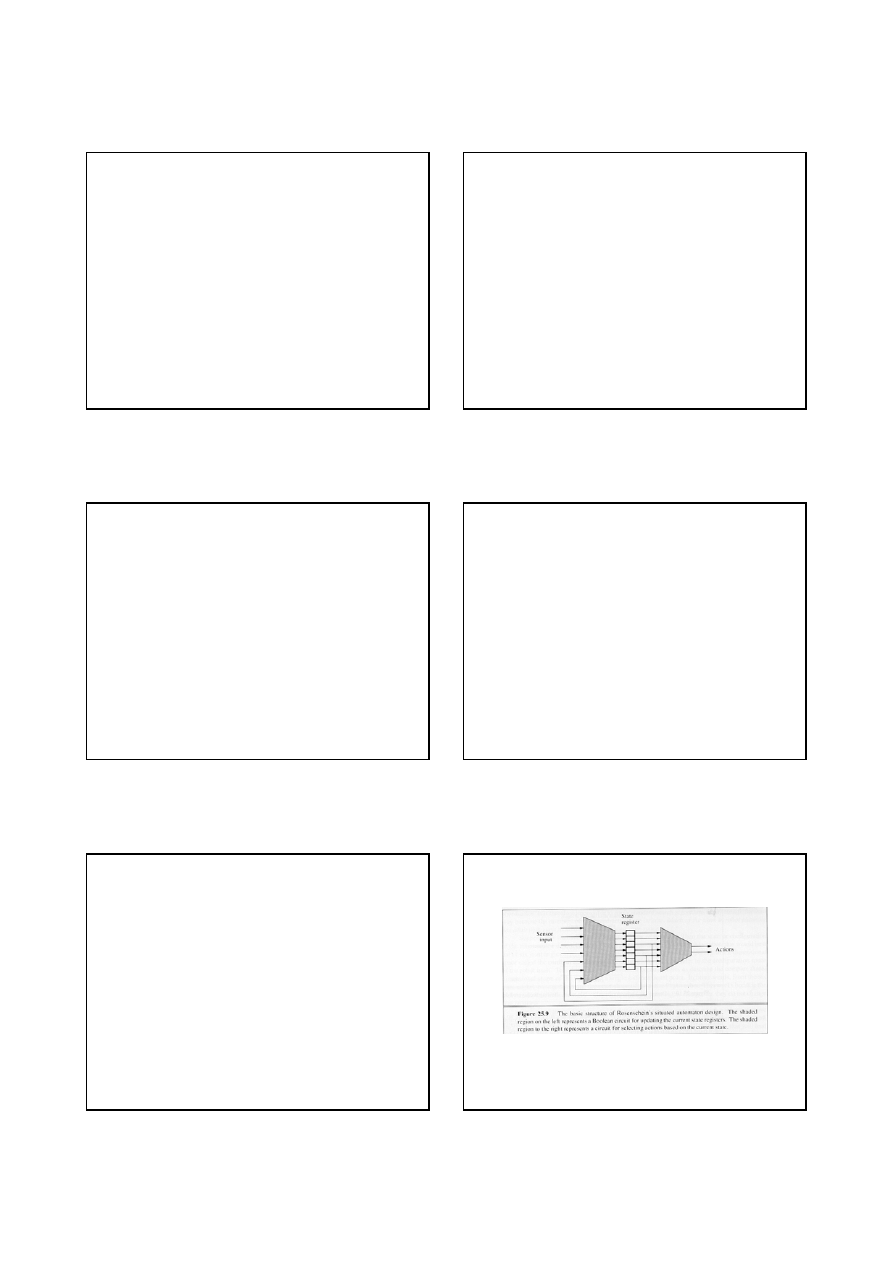
Situated automaton (1)
• Bazuje na koncepcji automatu skończonego:
– Na wejścia podawane sygnały z sensorów,
stosowanych do odbierania bodźców z otoczenia
– Wyjścia podłączone są do układów
wykonawczych robota
• Bardzo efektywna implementacja agenta
odruchowego ze stanem wewnętrznym
MSI-w7/34
Situated automaton (2):
Opracowywanie
• Generowanie poprzez
autonomiczny proces
kompilacji
• Manualny proces projektowania oparty na
dekompozycji
ze względu na różne
zachowania, którymi robot powinien się
wykazywać
MSI-w7/35
Situated automaton (3)
• Sposoby reprezentacji wiedzy:
– Formalna reprezentacja wiedzy przez
projektantów robota
– Wiedza zawarta w architekturze agenta
• Kompilator generuje automat skończony,
którego stany wewnętrzne odpowiadają
zdaniom logicznym dotyczącym środowiska
MSI-w7/36
Situated automaton (3)
• Wszystkie obliczenia wykonywane przez sieci ze
sprzężeniem do przodu
• Czas obliczeń bardzo krótki
• Nie wymaga jawnej reprezentacji wiedzy
7
MSI-w7/37
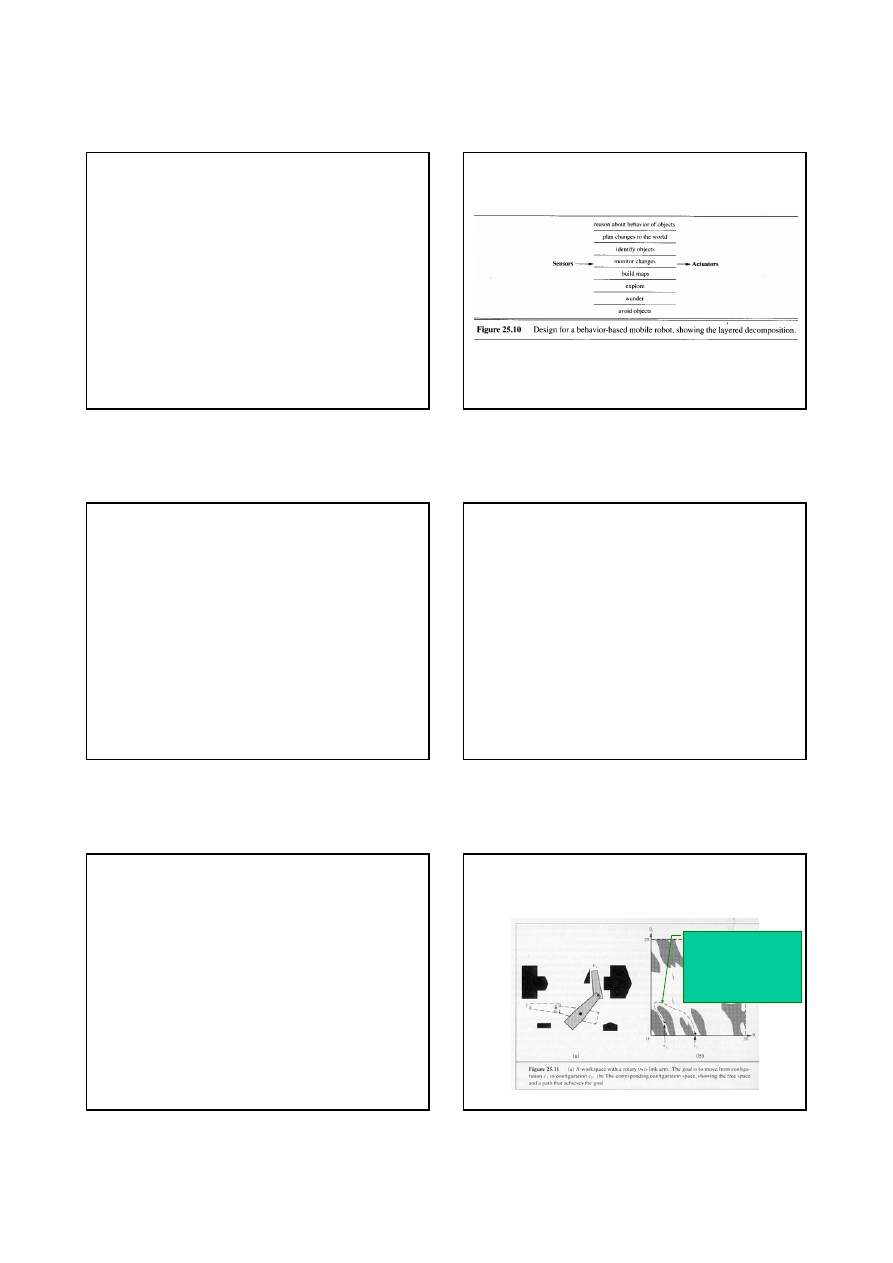
Bazowanie na zachowaniach (1)
• Dekompozycja na moduły realizujące
odpowiednie zachowania (omijanie
przeszkody, podążanie wzdłuż ściany, ...)
• Każdy moduł ma dostęp do sygnałów z
sensorów i może wysyłać sygnały do
układów wykonawczych
• Zachowania są zorganizowane w hierarchie
MSI-w7/38
Bazowanie na zachowaniach (2)
MSI-w7/39
Bazowanie na zachowaniach (3)
• Wyeliminowanie jako podstawy scentralizowanej,
kompletnej reprezentacji stanów otoczenia (co jest
bardzo kosztowne)
• Stan wewnętrzny potrzebny jedynie do śledzenia
tych stanów otoczenia, które są niedostępne dla
czujników, ale są potrzebne do wyboru akcji w
każdym zachowaniu
• Do reprezentowania stanu wewnętrznego czasem
wystarczy mało pamięci, nawet dla złożonych zadań
MSI-w7/40
Podstawy analizy przestrzeni
konfiguracji (1)
• Przestrzeń stanów
:
– opisuje wszystkie możliwe konfiguracje otoczenia
(włącznie z elementami robota)
– jest ciągła - konfiguracje elementów robota i lokalizacje
obiektów w przestrzeni fizycznej są określone we
współrzędnych rzeczywistych
• Przestrzeń konfiguracji
C
dla robota o k stopniach
swobody: zbiór wszystkich punktów, których
współrzędnymi są wartości opisujące położenia
wszystkich więzów robota:
[
]
k
q
q
,
,
1
K
=
q
MSI-w7/41
Podstawy analizy przestrzeni
konfiguracji (2)
• Przeszkoda w przestrzeni konfiguracji
O to
podzbiór
C
, w którym jakikolwiek element
robota uderza o cokolwiek (o obiekty
środowiska, inny element robota)
• F =
C
-
O jest wolną przestrzenią, w której
robot może bezpiecznie się poruszać.
MSI-w7/42
Podstawy analizy przestrzeni
konfiguracji (3)
Robot może poruszać
się bezpiecznie, bo
istnieje ciągła ścieżka
pomiędzy punktami
całkowicie leżąca w
F
8
MSI-w7/43
Uogólniona przestrzeń konfiguracji (1)
• Przestrzeń konfiguracji, w której stan innych
obiektów jest uwzględniony jako część
konfiguracji:
– Inne obiekty mogą być ruchome
– Kształty innych obiektów mogą się zmieniać:
• Obiekty posiadające więzy mechaniczne (nożyczki)
• Obiekty deformowalne (łańcuch, papier, ...)
• Szczególnie przydatna w planowaniu montażu
MSI-w7/44
Uogólniona przestrzeń konfiguracji (2)
• E - przestrzeń wszystkich możliwych
konfiguracji obiektów innych niż robot
– Gdy do opisu wystarczy m parametrów
, przestrzeń
E jest m-wymiarowa
• W = C × E jest przestrzenią (k+m)-wymiarową
wszystkich możliwych konfiguracji w świecie
• Jeśli w rozwiązywanym zadaniu występuje
więcej robotów, utworzyć super-robota (jeden
wektor opisuje konfigurację wszystkich
robotów)
[
]
m
α
α
,
,
1
K
=
α
MSI-w7/45
Uogólniona przestrzeń konfiguracji (3)
• Ruchy obiektów bez pomocy robota (ślizganie się
obiektu po powierzchni stołu, ...) -
NIELEGALNE
• W przestrzeni
W jest (k+m) stopni swobody:
– tylko k sterowalnych (można zmieniać konfigurację
robota)
– konfiguracje obiektów zmieniają się tylko po akcji robota
• (k+m) - wymiarowa przestrzeń ze sterowaniem
wzdłuż dwóch typów dróg:
– Ścieżki przejścia samego robota
(transit paths)
– Ścieżki, po których robot przemieszcza obiekt
(transfer
paths)
MSI-w7/46
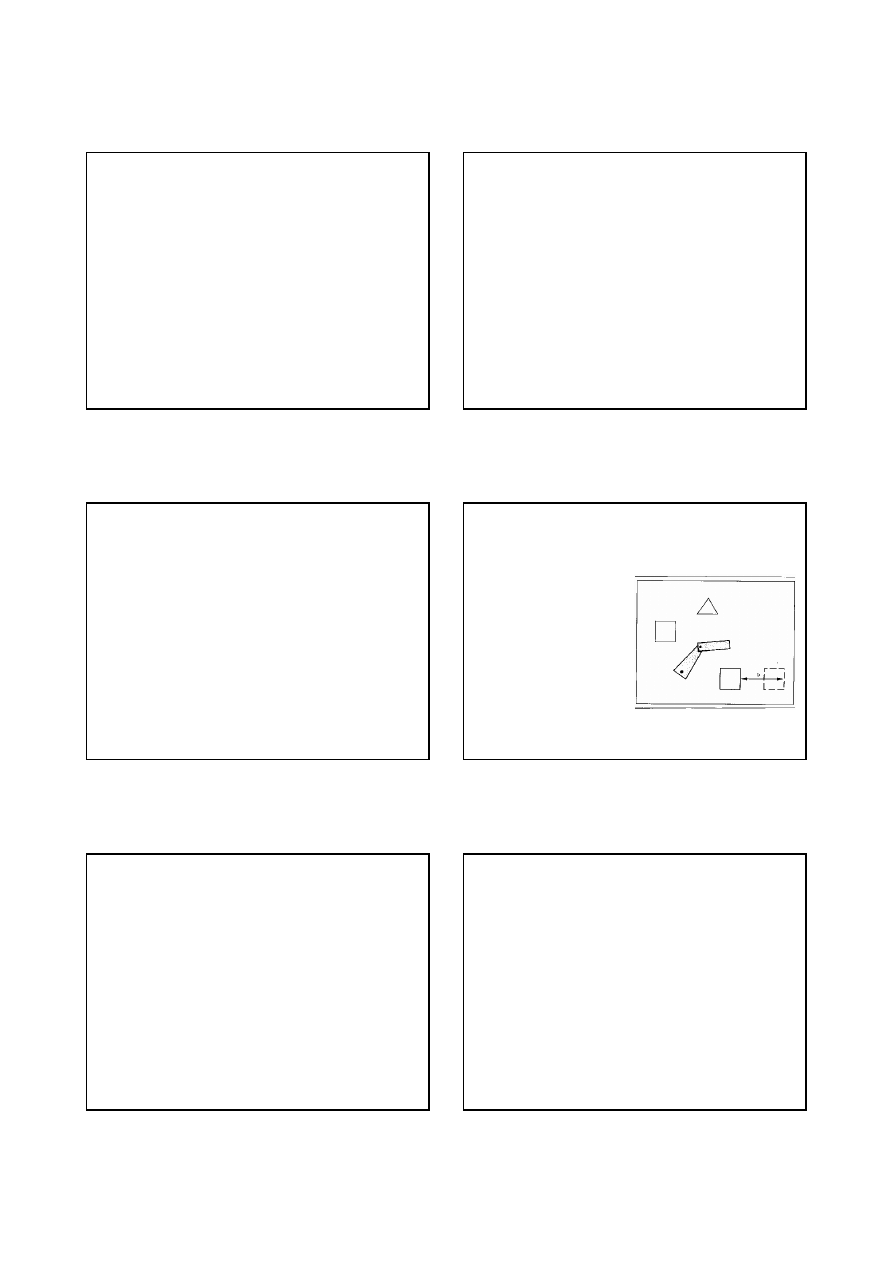
Podejście warstwowe
• Kartki książki, na każdej
nieco inna pozycja
ruchomego obiektu (b-
nowa współrzędna)
• Dla każdej wartości b
(stałe przeszkody)
jest
określone
F
• Transit motion
- wewnątrz
kartki
• Transfer motion
- ruch
pomiędzy kartkami
Manipulator o 2 członach
w przestrzeni roboczej z ruchomą
przeszkodą
MSI-w7/47
Planowanie w przypadku n
ruchomych obiektów
• Podział
W na skończoną liczbę małych
stanów - abstrahowanie (planowanie logiczne)
• Wpierw planowanie ruchów obiektów, potem
ruchu robota (klasyczny sposób planowania
montażu)
• Ograniczenie ruchów obiektów (podejście
LMT; sparametryzowana rodzina ruchów
obiektów - np. po prostych)
MSI-w7/48
Planowanie nawigacji i ruchu
• Dekompozycja komórkowa (cell
decomposition)
• Szkieletyzacja (skeletonization)
• Planowanie z ograniczonym błędem
(bounded-error planning)
• Nawigacja bazująca na punktach
orientacyjnych (landmark-based navigation)
• Algorytmy działania bezpośredniego (online)
9
MSI-w7/49
Dekompozycja komórkowa (1)
• Podziel
F na proste, połączone komórki
(
dekompozycja
)
• Określ, które komórki sąsiadują ze sobą i zbuduj
graf sąsiedztwa
• Określ,
w których komórkach leżą punkty
: startu i
docelowy, a następnie w grafie sąsiedztwa
wyszukaj
ścieżkę pomiędzy tymi komórkami
• Dla wyszukanego ciągu komórek
oblicz ścieżkę
wewnątrz komórki
, łączącą punkty graniczące z
sąsiednimi komórkami, przez które przechodzi
ścieżka
MSI-w7/50
Dekompozycja komórkowa (2)
MSI-w7/51
Dekompozycja komórkowa (3)
• Podejście rozumne, lecz niekompletne
• Otrzymuje się bezpieczną ścieżkę
• Nie zawsze da się znaleźć ścieżkę, nawet
jeśli istnieje
• Są inne sposoby dekompozycji, usuwające
te wady
MSI-w7/52
Metoda szkieletyzacji (1)
• Redukuje przestrzeń konfiguracji w
jednowymiarowy podzbiór (
szkielet
)
• Szkielet jest
siecią o skończonej liczbie
łuków
, w której ścieżki wyszukiwane są z
zastosowaniem
metod przeszukiwania
grafów
• Gdy start i cel nie są węzłami szkieletu,
trzeba jedynie określić
sposób dojścia do
jakiegoś węzła szkieletu
MSI-w7/53
Metoda szkieletyzacji (2)
• By planowanie było kompletne, muszą być
spełnione wymagania:
– Gdy
S jest szkieletem w wolnej przestrzeni F ,
S musi mieć pojedynczy kawałek wewnątrz
każdego połączonego regionu przestrzeni
F
– Dla każdego p
∈ F musi być łatwe obliczenie
ścieżki od p do szkieletu
S
MSI-w7/54
Metoda szkieletyzacji (3)
• Grafy widzialności (visibility graphs)
• Diagramy Voronoi
• Mapy drogowe (roadmaps)
10
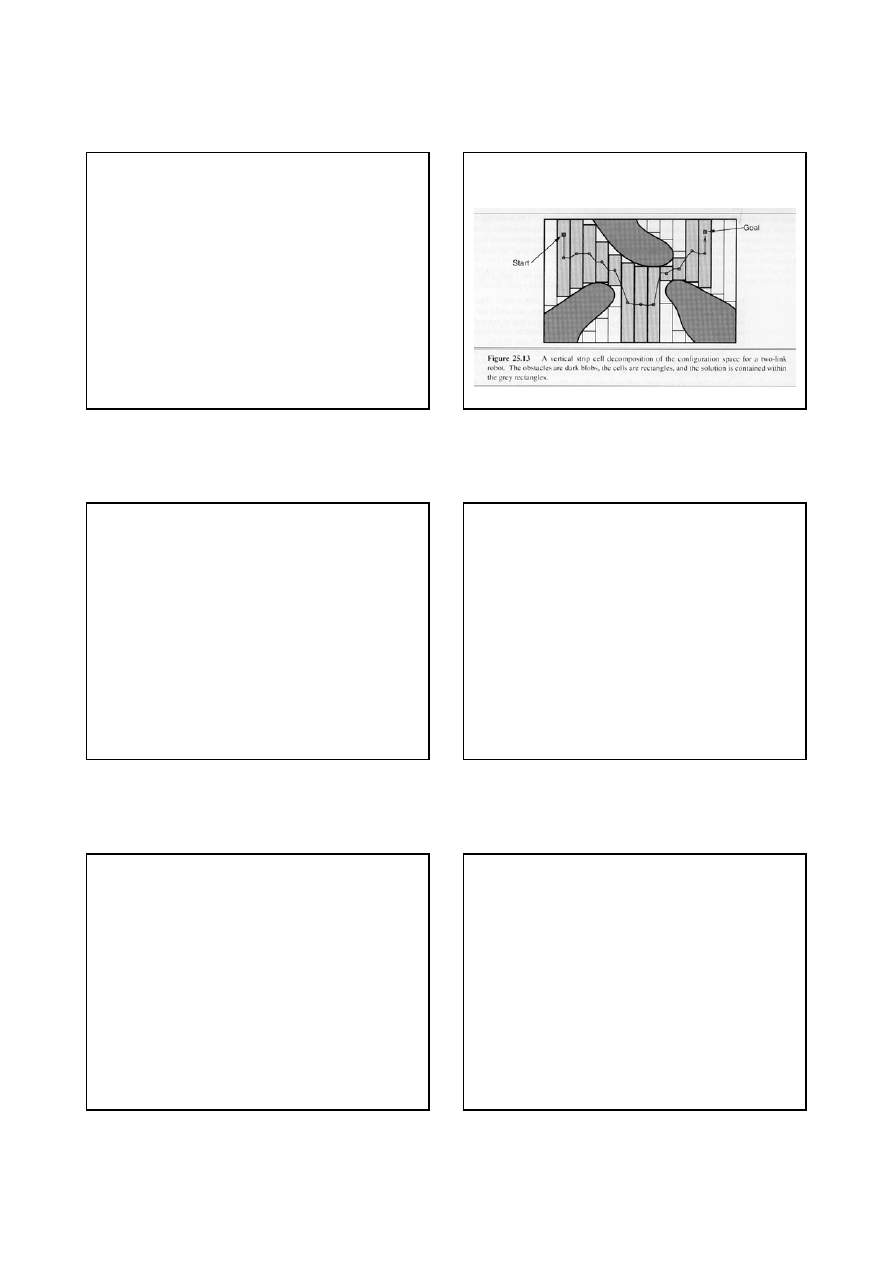
MSI-w7/55
Graf widzialności
Daje najkrótszą ścieżkę pomiędzy punktami
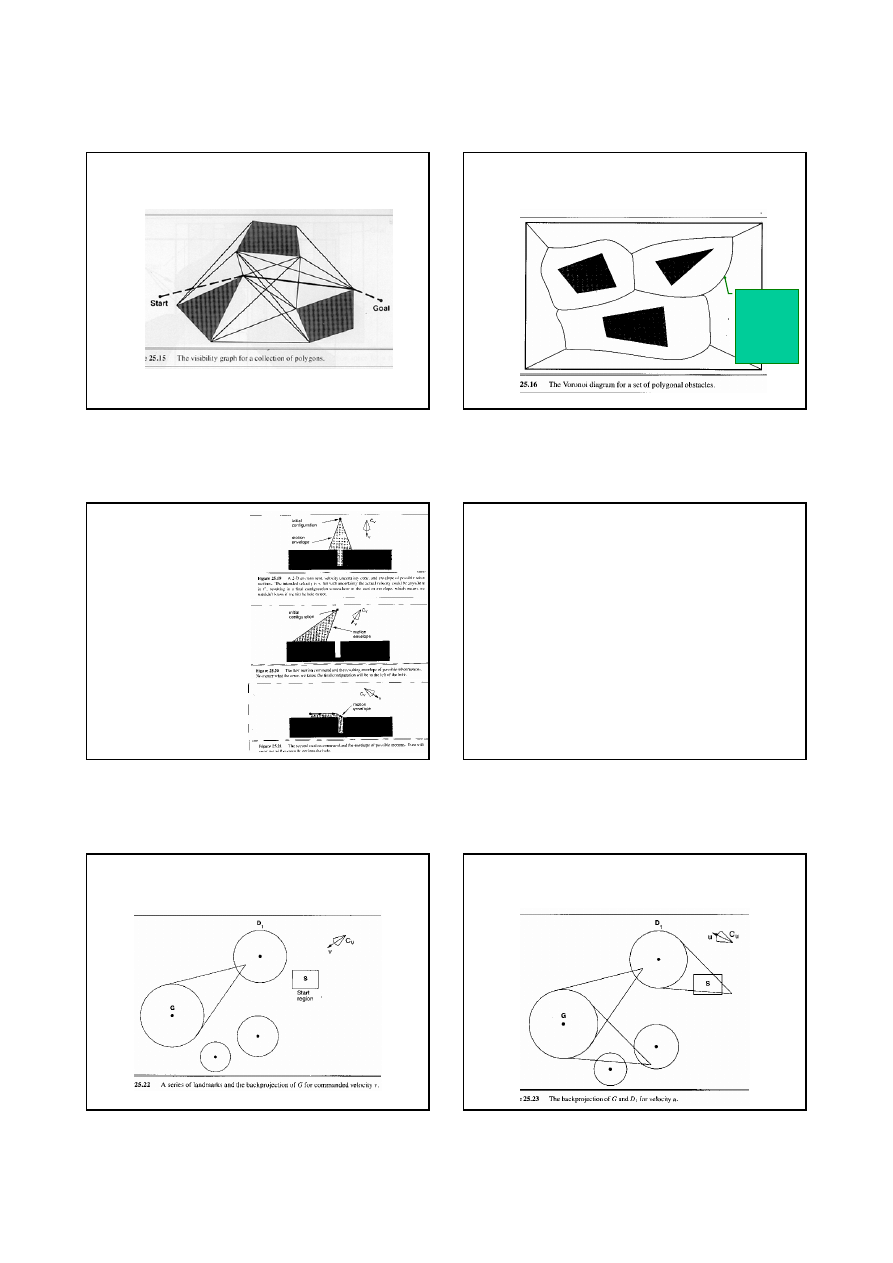
MSI-w7/56
Diagram Voronoi
Linie
równej
odległości
od
przeszkód
MSI-w7/57
Fine-motion
planning (FMP)
• Planowanie małych,
precyzyjnych ruchów (np.
montaż)
• Seria ostrożnych ruchów
• Ruchy „uległe”
umożliwiające
nieniszczące spotkania z
przeszkodami
• Uwzględnia się
niepewność akcji
• Bardzo złożony problem
planowania
MSI-w7/58
Landmark-based navigation (1)
• Proste czujniki do lokalizacji robota
• Landmark - punkt z polem wpływu
• Znane środowisko, nieznane położenie
robota (znany region, w którym jest)
• Nieprecyzyjne sterowanie (bardzo rozsądny
model); robot może mieć żyroskop/kompas
• Stosuje się projekcję wsteczną
(backprojection) uwzględniając stożek v
MSI-w7/59
Landmark-based navigation (2)
MSI-w7/60
Landmark-based navigation (3)
11
MSI-w7/61
Algorytm działania bezpośredniego
• Bardzo prosty algorytm
• Kompletny i efektywny
• Środowisko nieznane
dla robota, gdy startuje
• Nie można gwarantować
najkrótszej ścieżki
MSI-w7/62
Podsumowanie (1)
• Świat fizyczny jest niedostępny,
niedeterministyczny, nieepizodyczny i
dynamiczny
• Zastosowanie robotów spowodowało
skokowy rozwój w wielu dziedzinach
• Robot składa się z korpusu, sztywnych
kończyn i więzów; charakteryzuje go liczba
stopni swobody więzów
MSI-w7/63
Podsumowanie (2)
• Roboty mają sensory różnych typów: wizji,
siły, dotyku, sonar, oraz poczucie stanu ich
„części ciała”
• W dynamicznym świecie działanie musi
być podejmowane szybko
• Problem przemieszczania obiektów o
skomplikowanych kształtach jest złożony.
Jest on rozwiązywany w przestrzeni
konfiguracji
MSI-w7/64
Podsumowanie (3)
• Metody dekompozycji komórkowej i
szkieletyzacji umożliwiają nawigację w
przestrzeni konfiguracji, redukując liczbę
wymiarów przestrzeni poszukiwania
• Niektóre cechy otoczenia (dokładna
lokalizacja narzędzia, sworznia) są
nieznane. Stosuje się wtedy Fine-motion
planning
MSI-w7/65
Podsumowanie (4)
• Niepewność dotyczy także wyników
pomiaru w dużej skali (sonar). W modelu
landmark robot posługuje się dobrze
znanymi landmarkami w celu określenia
swojego położenia.
• Gdy nie jest dostępna mapa otoczenia, robot
musi planować nawigację podczas
poruszania się. Stosuje algorytmy online,
nie zawsze dające najkrótszą ścieżkę, ale
skuteczne.
Wyszukiwarka
Podobne podstrony:
MSI AiR w5 2004
MSI AiR w6 2004
MSI AiR w2 2004
MSI AiR w1 2004
MSI AiR w4 2004
MSI AiR w3 2004
MSI 2006 w7
2004, W7 - inżynierii środowiska
ti 1102 Transporter 2004 Heating and Air Conditioning
131 Jak to jest z powietrzem u góry How s the air up there Jay Friedman,Sep 9, 2004
2004 mx comp air
W7 zarządzanie zapasami
więcej podobnych podstron