Elektrotechnika i elektronika (konspekt)
Franciszek Gołek (golek@ifd.uni.wroc.pl)
www.pe.ifd.uni.wroc.pl
Wykład 14 i 15
Pomiary

Pomiary i testy
We wszelakich laboratoriach pomiary i testy są
podstawowymi czynnościami, które często mają
charakter badań naukowych. Pomiary i testy mają też
fundamentalne znaczenie we wszelkich procesach
technologicznych – zapewniają kontrolę rozmaitych
procesów.
Zarówno pomiar jak i test wymaga odpowiedniej
aparatury pomiarowej i polega na wizualizacji i zapisie
określonych wielkości fizycznych.
Pomiar jest procesem dostarczającym określonej
informacji i jak każdy proces wymaga energii. Pomiarowi
mogą podlegać wszelkie zjawiska fizyczne i stany
układów fizycznych.
Elektronika w metrologii, podobnie jak w wielu innych dziedzinach,
dokonuje rewolucyjnego rozwoju pod wieloma względami.
Poprawiane są: precyzja, szybkość, automatyzacja i wiele innych
aspektów pomiaru. Obecnie niemal wszelkie nieelektryczne
wielkości fizyczne są mierzone (bądź monitorowane) poprzez ich
konwersję na takie wielkości elektryczne jak: napięcie, natężenie
prądu, częstotliwość/okres przebiegu napięcia/natężenia prądu.
Konwersji dokonuje się przy pomocy tzw. sensorów (czujników
pomiarowych - przetworników) i odpowiednich układów
elektronicznych. Sensory pozwalają wykryć i zarejestrować
zmiany danej wielkości fizycznej. Sygnał sensora jest, przez
odpowiedni układ elektroniczny, zamieniany na sygnał elektryczny
(zwykle napięcie) nadający się do zapisu, wizualizacji lub innego
wykorzystania np. do automatycznej regulacji jakiegoś procesu.

Przykłady sensorów
Udoskonalanie i poszukiwanie nowych sensorów stało się
odrębną dziedziną naukowo-techniczną zwaną sensoryką.
Sensoryka oferuje długą i ciągle rosnącą listę sensorów
pozwalających zamieniać poszczególne wielkości fizyczne na
sygnały elektryczne.
Pomiar temperatury: Termoelement (termopara), bolometr
(układ o minimalnej pojemności cieplnej wykonany z
nadprzewodnika lub półprzewodnika zmieniający oporność przy
zmianie temperatury pod wpływem znikomych ilości ciepła lub
promieniowania), termometr oporowy, termistor, bimetale, diody,
tranzystory, rezonator kwarcowy, pirometr.
Pomiar oświetlenia: Fotodioda, fototranzystor, fotorezystor,
fotopowielacz,
Pomiary wibracji akustycznych i mechanicznych: Mikrofony
(dynamiczne, pojemnościowe, piezoelektryczne), czujniki
sejsmometryczne.
Pomiar siły: Tensometr, dynamometr, mikrodźwignia z układem
optycznym.

Pomiar natężenia pola magnetycznego: Cewka indukcyjna, halotron,
półprzewodnikowy Gaussotron, kompas.
Pomiar ciśnienie: Tensometr na membranie, mikrofon pojemnościowy,
głowice ciśnieniowe i próżniowe, barometry.
Pomiar przesunięcia: Potencjometr, Indukcyjny czujnik przesunięcia,
optyczny czujnik przesunięcia na kodzie kreskowym, laserowy czujnik
przesunięcia, piezoelektryczny czujnik przesunięcia.
Pomiar stężenia gazu lub toksyn: Rezystor ceramiczny, tranzystor MOSFET,
rezonator kwarcowy z warstwą selektywnie sorbującą gaz, komórki
elektrochemiczne, układy MOS, przewodzące polimery i chemorezystory,
detektory promieniowania i cząstek w spektrometrach.
Pomiar wilgotności: Kondensator z dielektrykiem pochłaniającym wodę,
układy cienkowarstwowe i rezystory pochłaniające wodę, rezonatory kwarcowe
z układem chłodzącym Peltiera.
Pomiar promieniowania jonizującego: Licznik Geigera, scyntylatory, komory
pęcherzykowe, dozymetry stałociałowe, fotopowielacze, powielacze
elektronowe.
Prędkość przepływu: Anemometr, Nadajnik/odbiornik ultradźwiękowy,
turbinka, czujnik z gorącym drutem, czujnik membranowy.
I wiele innych.
MEMS (microelectromechanical systems)
Są to miniaturowe elektromechaniczne urządzenia wykonywane technologią
układów scalonych. Działają jako sensory ciśnienia, przyspieszenia lub innej
wielkości fizycznej będąc jednocześnie częścią układu scalonego (sensor na
chipe).
Pomiar częstotliwości rezonatora
kwarcowego spełniającego rolę sensora.
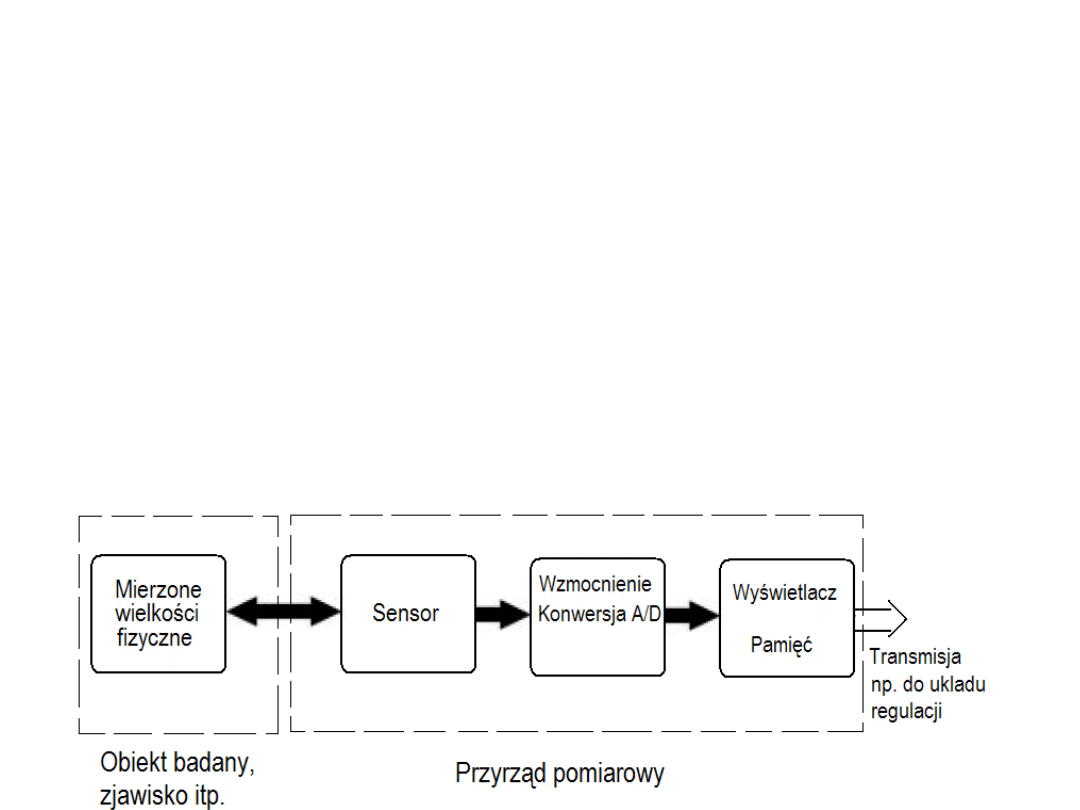
W 1959 roku G. Sauerbrey wyprowadził wyrażenie pozwalające
korelować zmiany częstotliwości oscylacji kryształu piezoelektryka
z masą substancji na nim osadzonej. Zaproponował też metodę
pomiaru charakterystycznej częstotliwości i jej zmian polegającą
na użyciu kryształu jako elementu generatora, decydującego o
jego częstotliwości oscylacji. Przy założeniu, że osadzona masa
„dodaje się na sztywno” do masy rezonującego piezoelektryka (w
ilości do 5% masy) Sauerbrey zaproponował równość:
gdzie:
∆
m – zmiana masy, f
0
– częstotliwość rezonansowa,
∆
f –
zmiana częstotliwości, A – powierzchnia elektrod (cm
2
),
ρ
q
–
gęstość kwarcu (2,648 g/cm
3
) ,
µ
q
– moduł sprężystości
poprzecznej kwarcu (dla cięcia AT
µ
q
= 2,947 10
11
g/s
2
cm)
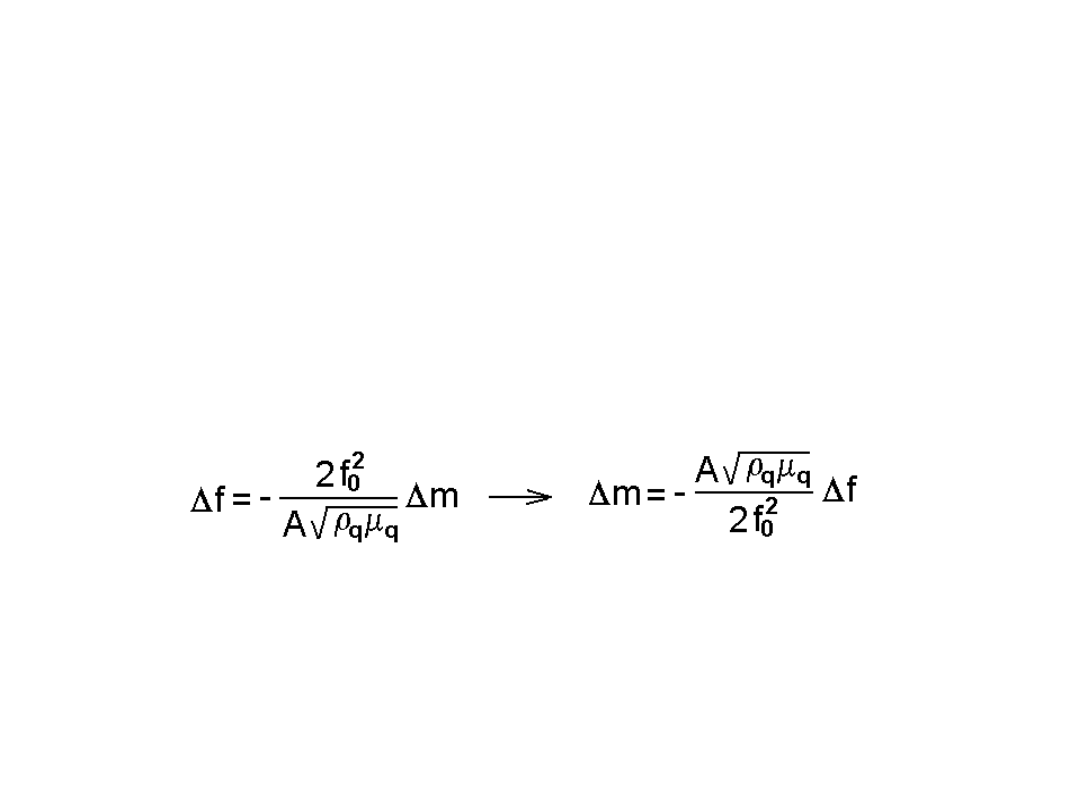
Przykładowy układ pomiaru częstotliwości rezonatora kwarcowego
spełniającego rolę sensora.
W poniższym układzie rezonator Q1 jako sensor może zmieniać częstotliwość oscylacji generatora
G1. Zmiana częstotliwości może być wymuszana zmianami np.: a) temperatury Q1, b) zmianami
rodzaju ośrodka w którym znajduje się Q1 (ciecz, gaz), c) grubością i strukturą adsorbatu lub osadu
na powierzchni Q1. sygnały napięciowe o częstotliwościach f1 i f2 są „zdudniane” na nieliniowej
charakterystyce diody D. Frakcja zdudniania o niskiej częstotliwości f = If1 - f2I jest przekazywana
filtrem dolno przepustowym do wzmacniacza na tranzystorze T3. Mierząc zmiany częstotliwość f
sygnału wyjściowego o częstotliwościach około 10kHz naprawdę mierzymy zmiany częstotliwości
sygnału generatora G1 – o częstotliwościach około 10MHz. Tak uzyskujemy zwiększenie względnej
dokładności pomiaru zmian f generatora G1 (przy założeniu, że częstotliwość G2 jest stabilna).
Sygnał o częstotliwości rzędu 10 kHz łatwiej jest rejestrować mikrokontrolerem czy komputerem niż
sygnał o częstotliwości rzędu 10 MHz. Wadą tego układu jest wygasanie sygnału generatora G1
przy większym obciążeniu sensora Q1.
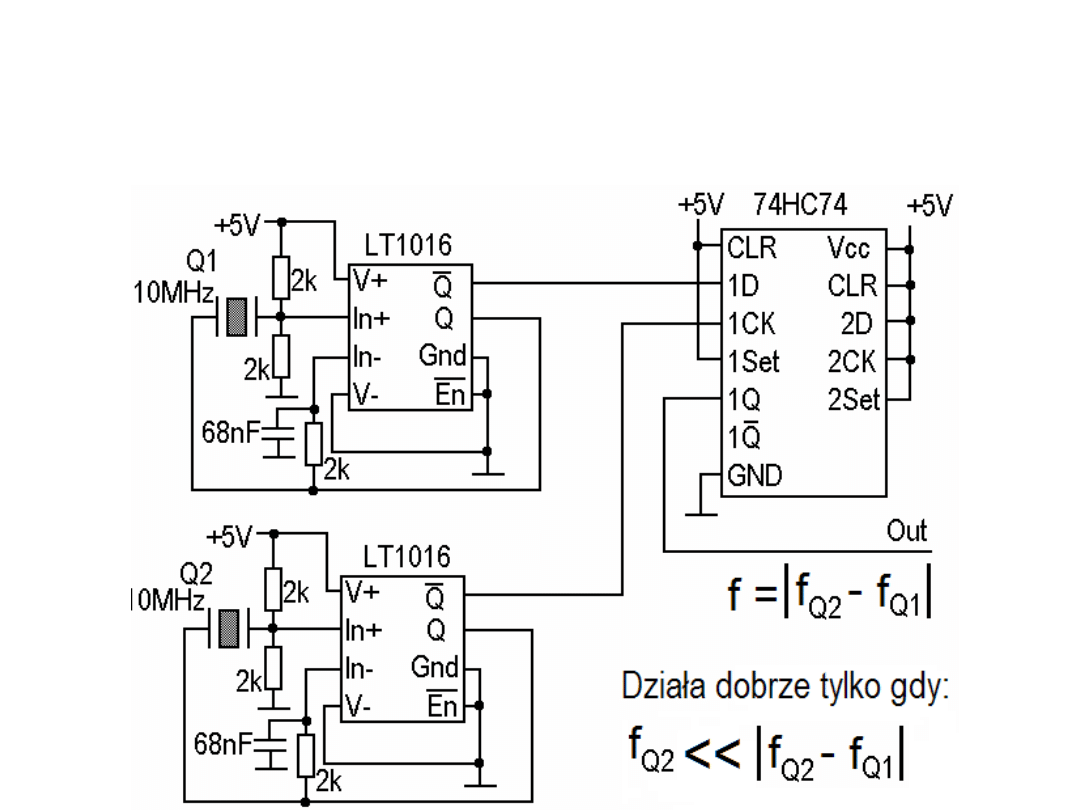
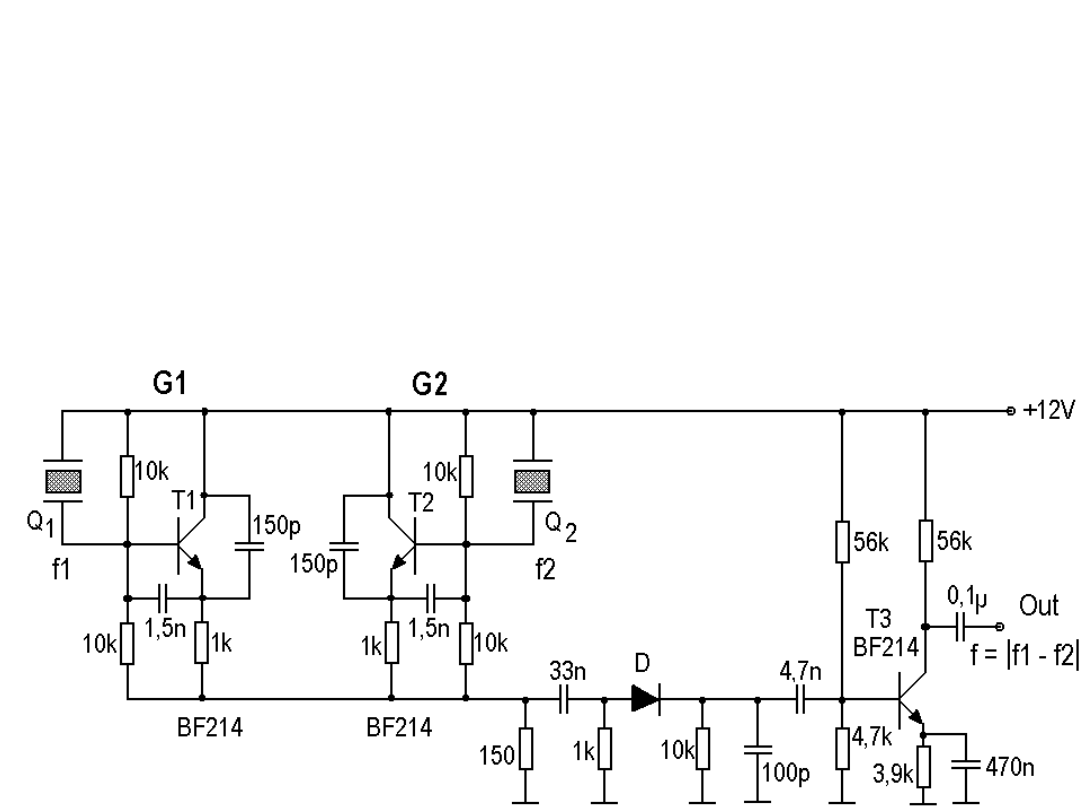
Generatory wykorzystujące przerzutniki jako
wzmacniacze
są bardziej stabilne, mają duży zapas wzmocnienia i nie
są wrażliwe na obciążenia sensorów kwarcowych. Godnymi polecenia są tu
ultraszybkie przerzutniki LT1016 i poniższy przykładowy układ mikrowagi.
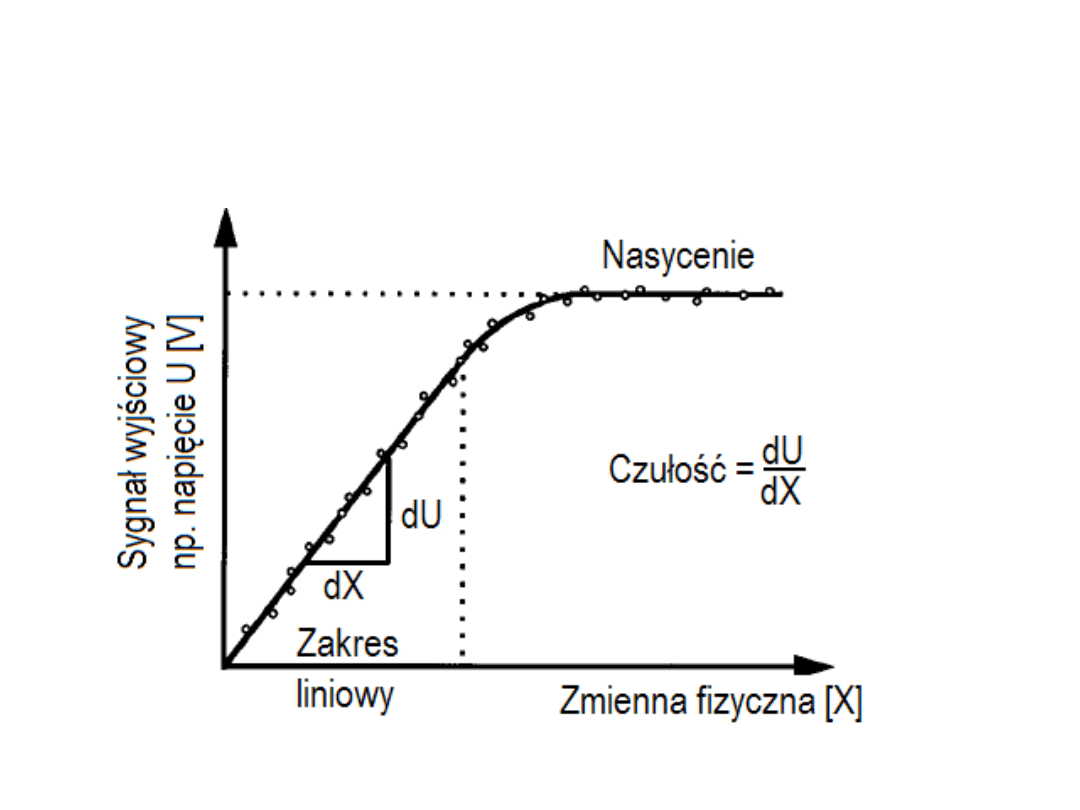
Kalibracja sensora.
W praktyce pomiar jest czynnością (lub zbiorem czynności), która
pozwala stwierdzić, że mierzona wielkość ma (lub miała w
określonych warunkach i czasie) wartość liczbową X wybranych
jednostek z dokładnością do
±
b jednostek.
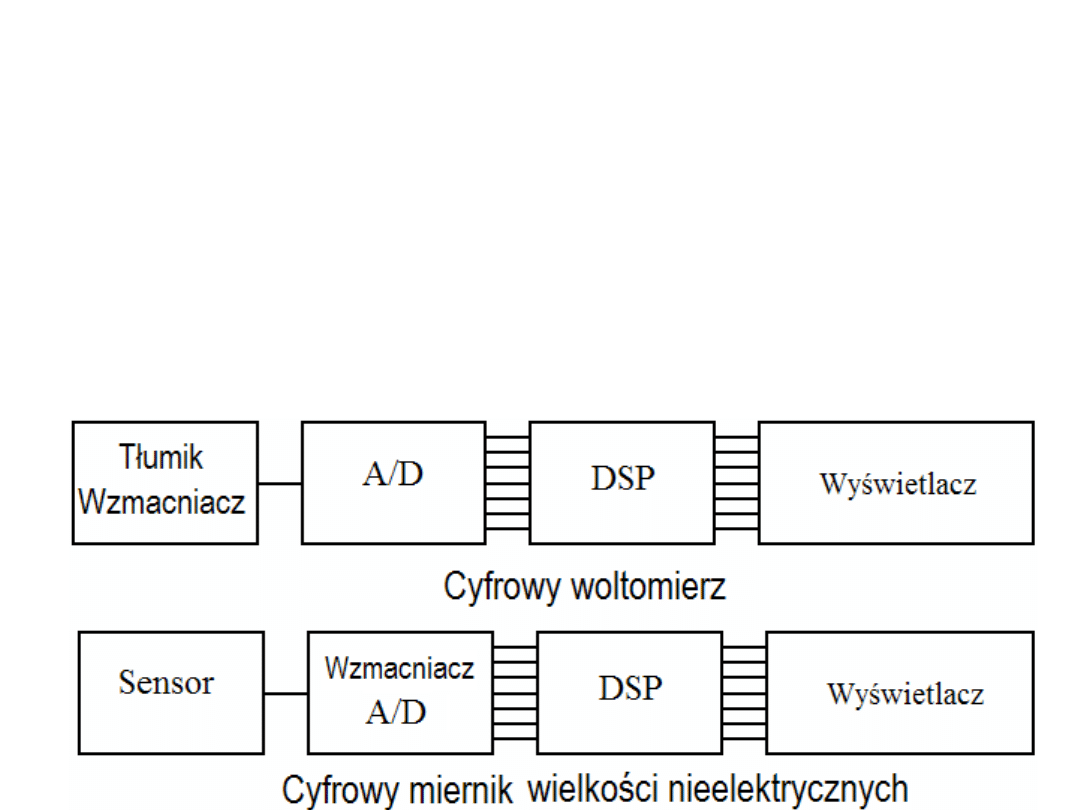
Pomiary dzielimy na dwie grupy:
a) Pomiary wielkości elektrycznych (napięcia, natężenia prądu,
rezystancji itp.)
b) Pomiary wielkości nieelektrycznych zwykle wymagają
przetworników (sensorów), które zamieniają wielkości
nieelektryczne na elektryczne.
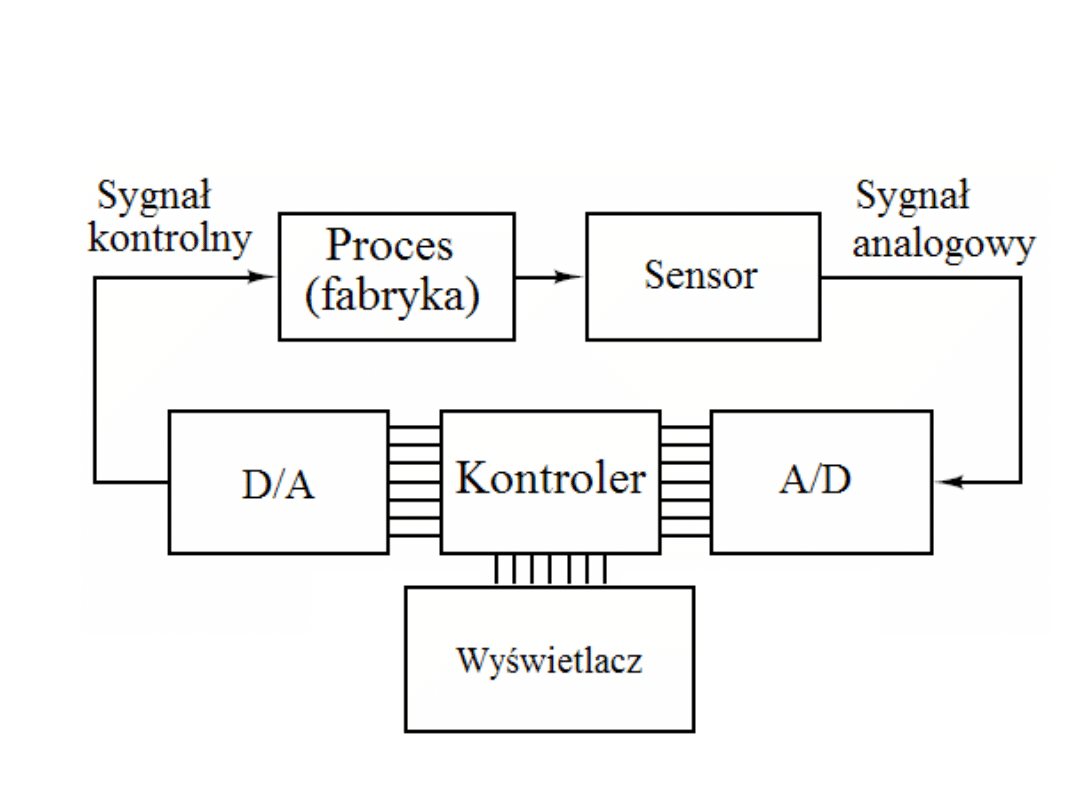
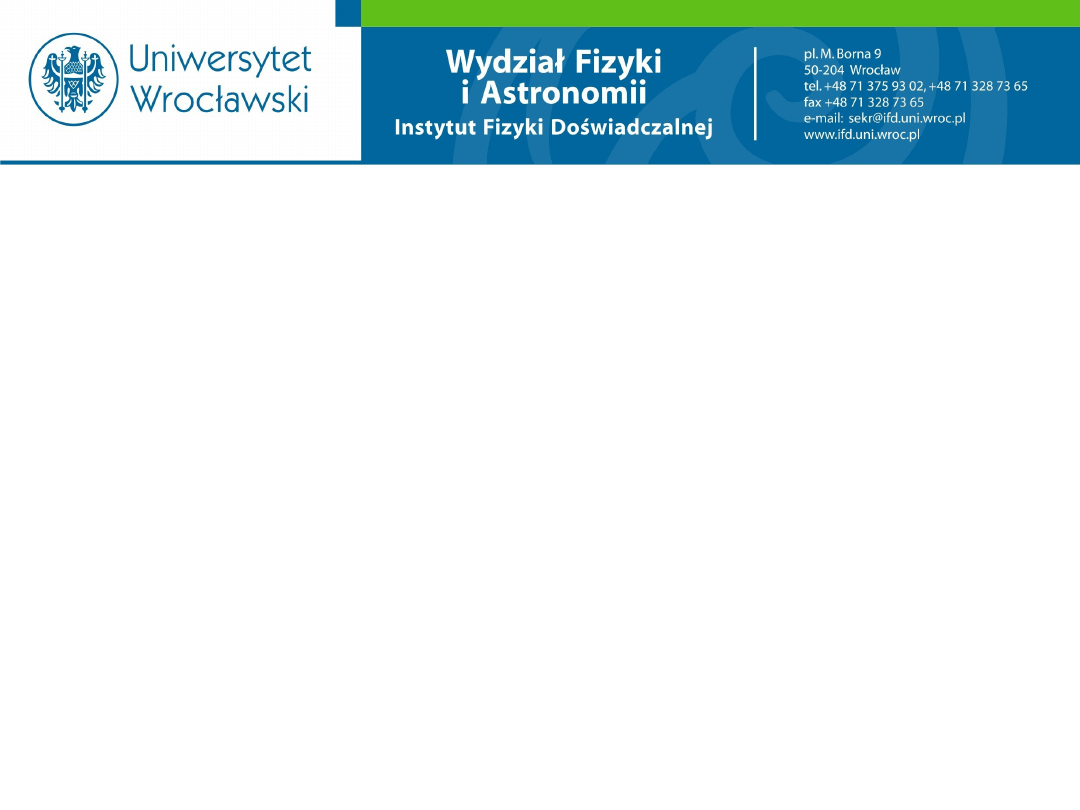
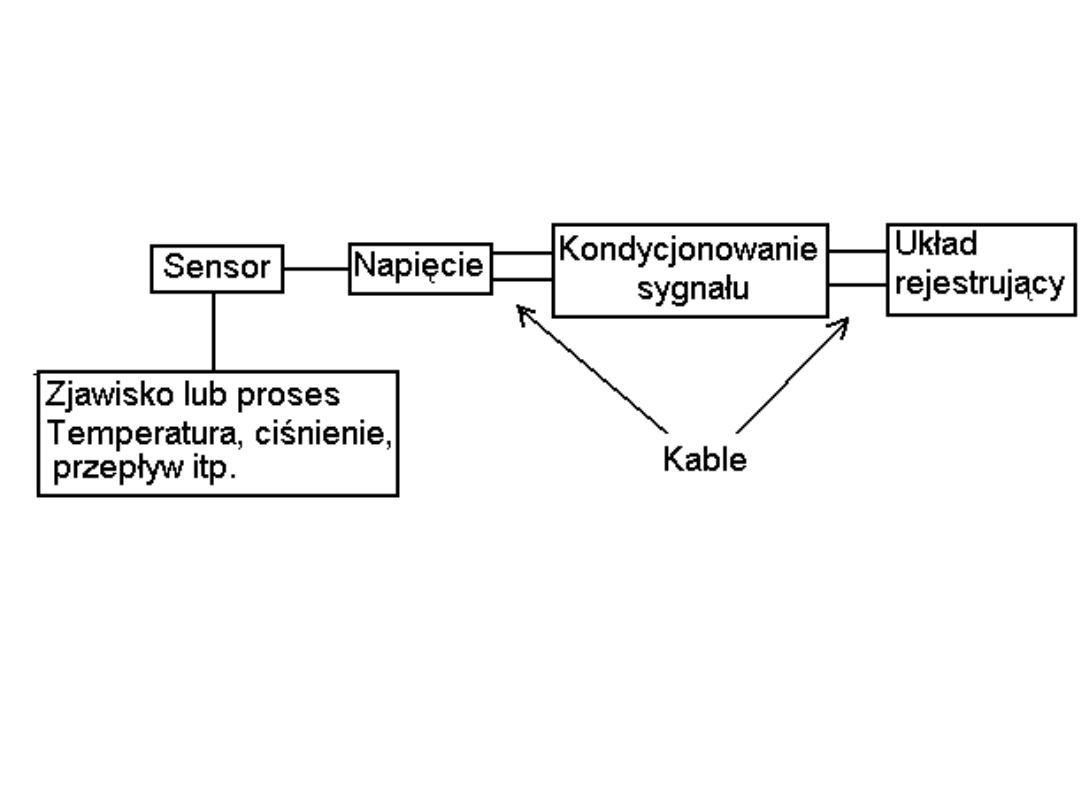
Schemat blokowy typowego zastosowania mierników.
Konwersja analogowo-cyfrowa
Układy A/D (ADC, A/C) zamieniają sygnał analogowy na sygnał cyfrowy.
Najważniejsze parametry:
1) Szybkość przetwarzania - może być określona przez:
a) czas przetwarzania - określający czas konieczny do jednego całkowitego
przetworzenia wartości analogowej na wartość cyfrową,
b) częstotliwość przetwarzania - która jest maksymalną częstotliwością z jaką mogą
następować kolejne przetworzenia sygnału wejściowego z zachowaniem określonej
rozdzielczości i dokładności w całym zakresie przetwarzania,
c) szybkość próbkowania - określona przez liczbę próbek, które mogą być
przetworzone w jednostce czasu. Ważnym jest aby częstotliwość próbkowania f
P
≥
2f
max
.
2) Rozdzielczość przetwornika - definiowana jest jako liczba bitów słowa
wyjściowego, określa zdolność do rozróżniania sygnałów analogowych
doprowadzonych do wejścia przetwornika. W przetworniku 8 bitowym możliwe jest 2
8
= 256 różnych wartości. Jeżeli zakres przetwarzanego napięcia wynosi 10V, to wartość
najmniej znaczącego bitu (LSB) odpowiada sygnałowi 10V/256 = 39 mV. Znaczy to,
że przetwornik może rozróżnić sygnały różniące się od siebie o 39mV.
Przetworniki 24 bitowe (2
24
=16777216) rozróżnia zmiany mniejsze od 1
µ
V. Przy
doborze (zakupie) układu A/D pod uwagę bierzemy: a) szybkość, b) precyzję, c)
impedancję wejściową, d) zakres wartości przetwarzanych napięć wejściowych.
Uwaga. W przetwornikach A/C najczęściej stosowane są kody: BINARNY Z
PRZESUNIĘCIEM lub U2.
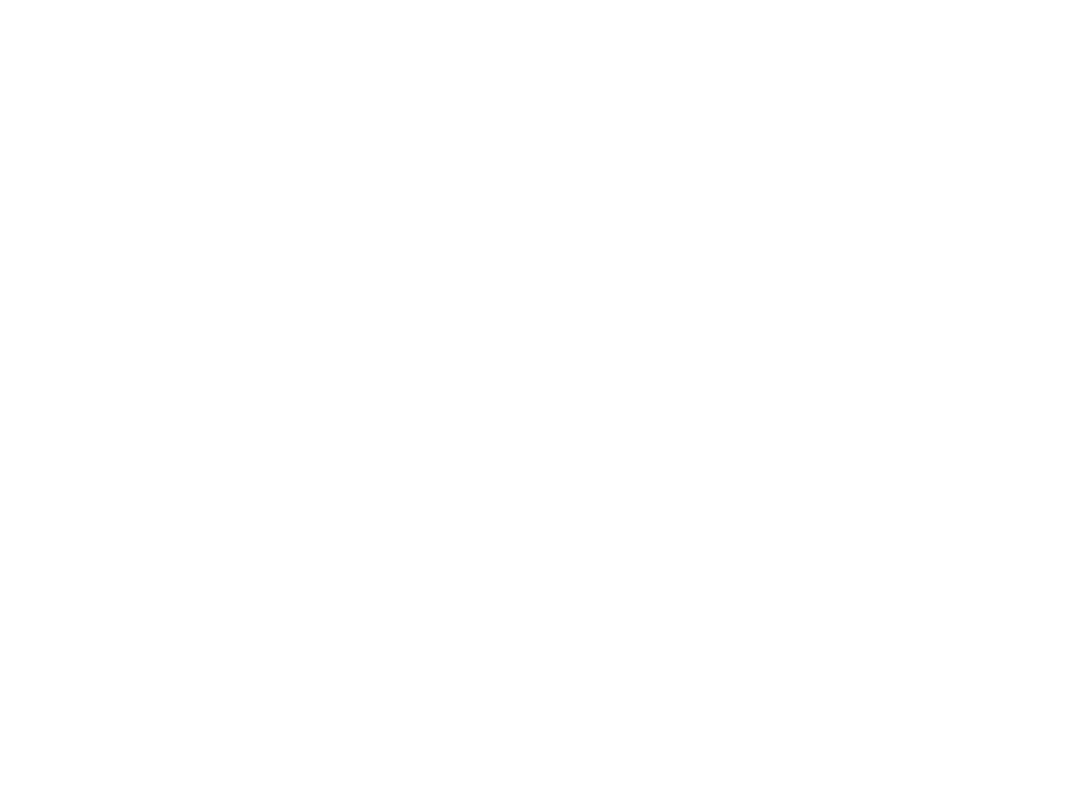
Przykład przetwornika
analogowo-cyfrowego (ADC):
(
Konwersja z koderem priorytetu
)
Komputerowa karta pomiarowa
oprócz przetwornika ADC
zawierają również przetwornik
cyfrowo-analogowy (D/A, DAC).
Pozwalają one zamieniać liczbę
binarną na proporcjonalne do niej
napięcie. Poprzez przetworniki
możemy komputerowo sterować
zasilaczami uzyskując pożądany
przebieg napięcia lub prądu.
Ważne parametry to: częstotliwość
konwersji, liczba bitów (czyli precyzja)
i zakres napięć.

Przetworniki A/D i D/A (ADC, DAC - analog-to-digital,
dygital-to-analog converters).
Dla szerokiego wykorzystania komputerów między innymi
konieczne jest odpowiednie „interfejsowanie” umożliwiające
wymianę sygnałów (informacji) między komputerem a
urządzeniami zewnętrznymi. Zależnie od rodzaju sygnału
może być przydatny cyfrowy lub analogowy obwód
interfejsowy. Jednak bardzo często zachodzi konieczność
konwersji sygnałów analogowych na równoważną im
reprezentację cyfrową (A/D), którą łatwo zapisać, zapamiętać i
przetwarzać w systemach cyfrowych. W wielu przypadkach
zachodzi konieczność konwersji odwrotnej z postaci cyfrowej
na analogową (D/A).
W rozmaitych procesach pomiarowo kontrolnych czy
technologicznych nieodzowne są konwersje A/D i D/A.

Chociaż do konwersji A/D i D/A są dostępne odpowiednie
wyspecjalizowane układy to warto poznać elementarne zasady
takich konwersji.
Specyfikacja przetworników DAC udostępniana przez
producentów zawiera: rozdzielczość (czyli minimalna
niezerowa wartość napięcia), dokładność, zakres, czas
ustalania wyjściowej wartości napięcia, parametry zasilania
i pobierana moc.
Przykład. Wyliczyć wielkość minimalnego kroku dU
(rozdzielczość), 8-bitowego przetwornika DAC na zakres U
max
=10 V.
Rozw. dU = (U
max
– U
min
)/(2
8
– 1) = 10/255 = 39,2 mV.
Komentarz. Rozdzielczość zależy od ilości bitów i od
wielkości zakresu napięć!
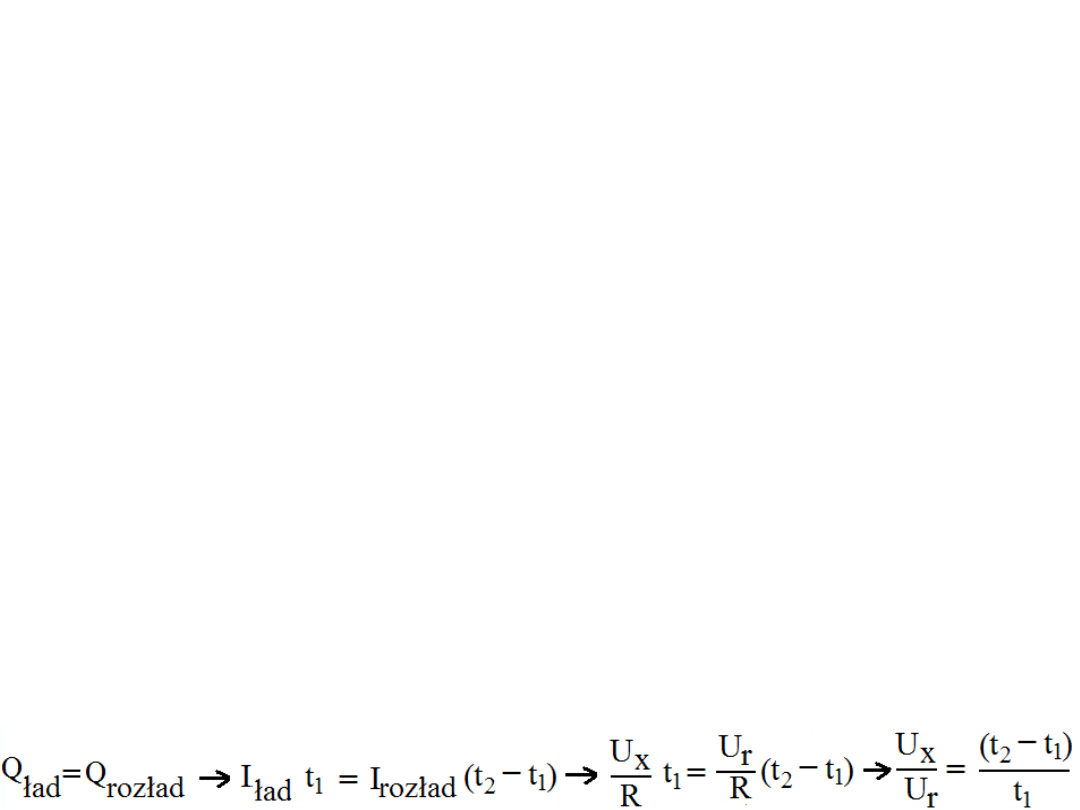
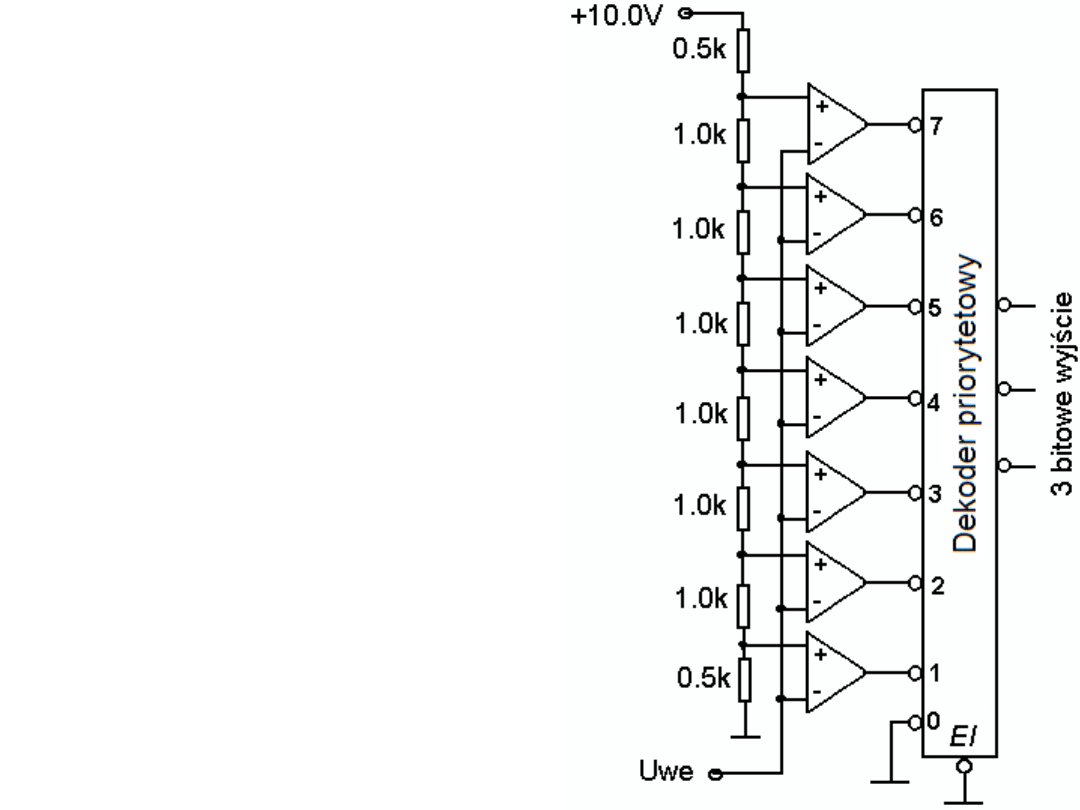
Często stosowaną wersją ADC jest układ o podwójnym
całkowaniu (schemat na następnej stronie). Napięcie mierzone
jest podawane na układ całkujący, w którym przez ściśle
określony czas (ściśle określona liczba cykli zegara) ładowana
jest wzorcowo stała pojemność. Po tym ustalonym czasie
napięcie referencyjne (precyzyjnie ustalone) o przeciwnym
znaku jest przykładane do układu całkującego i teraz
rozładowywana jest wzorcowa pojemność. Czas rozładowania
t
2
– t
1
(ilość cykli precyzyjnego zegara), po którym wyjście
układu całkującego wraca do zera (Voltów) jest precyzyjnie
mierzony. Ładunek na pojemności zgromadzony w czasie t
1
jest proporcjonalny do mierzonego napięcia U
x
i czasu t
1
.
Ładunek ten jest oczywiście dokładnie w całości tracony w
czasie rozładowania czyli powrotu do 0 V.
.
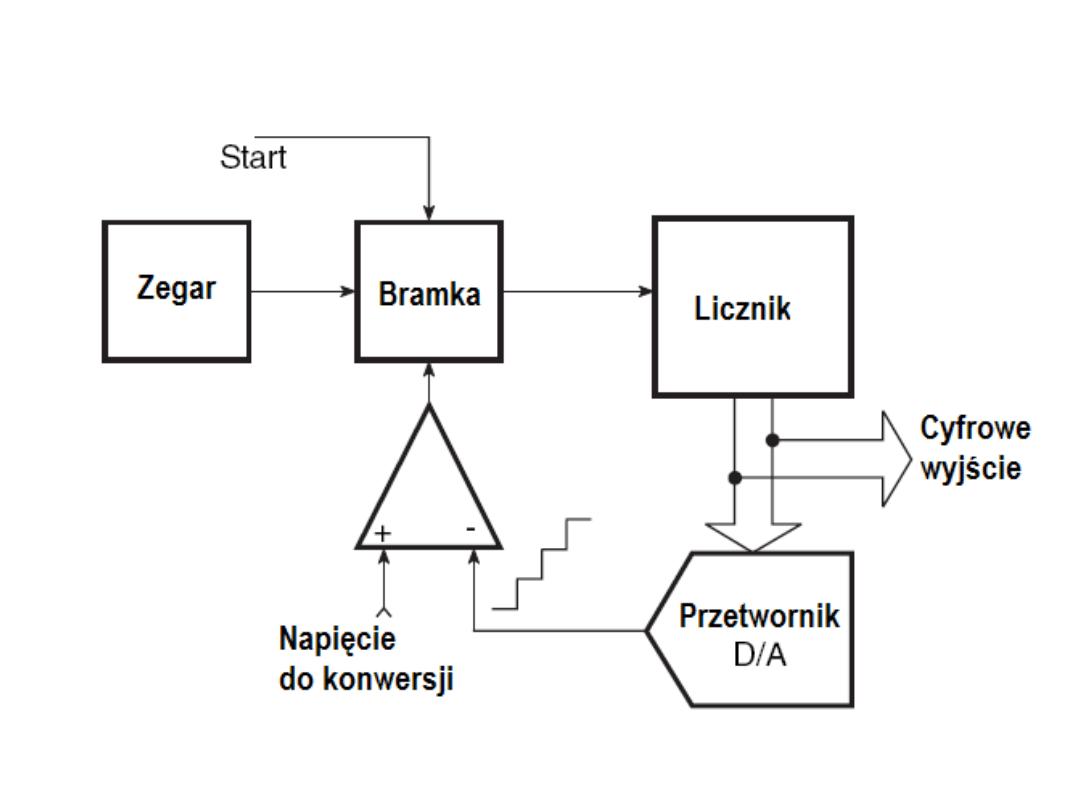
Idea przetwornika A/D typu licznik.
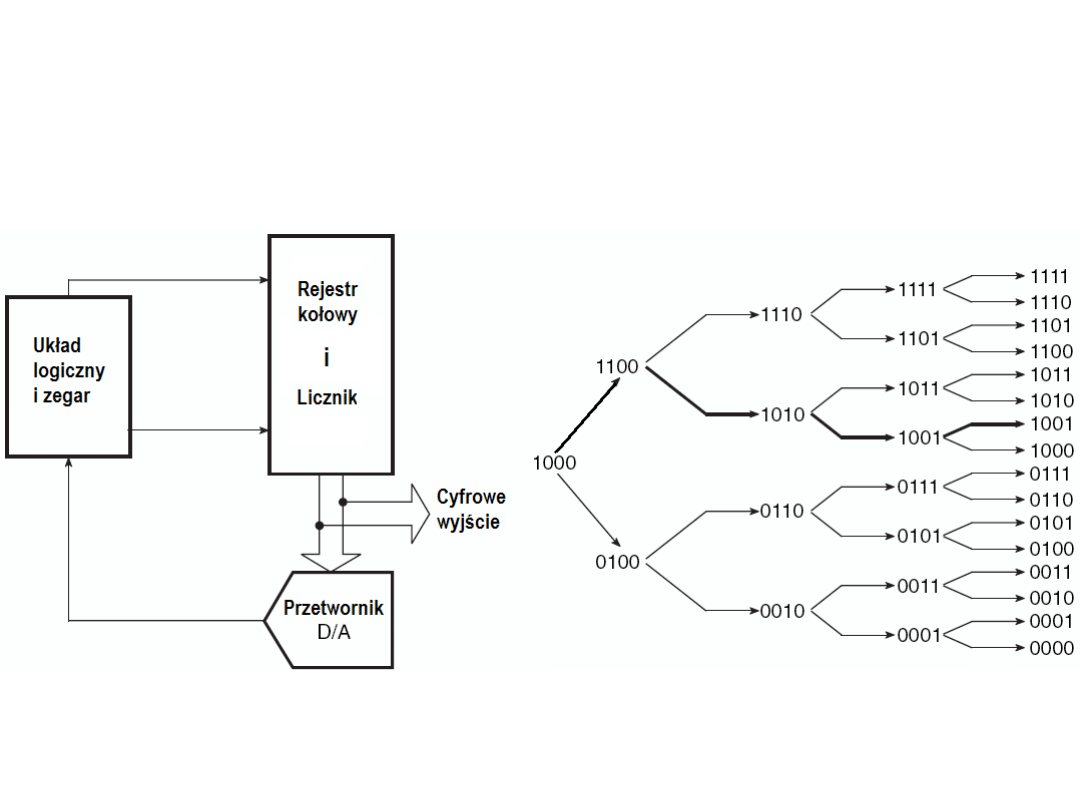
Idea przetwornika A/D typu sukcesywnej aproksymacji.
Jest szybki bo niewiele cykli zegara prowadzi do zakończenia
konwersji.
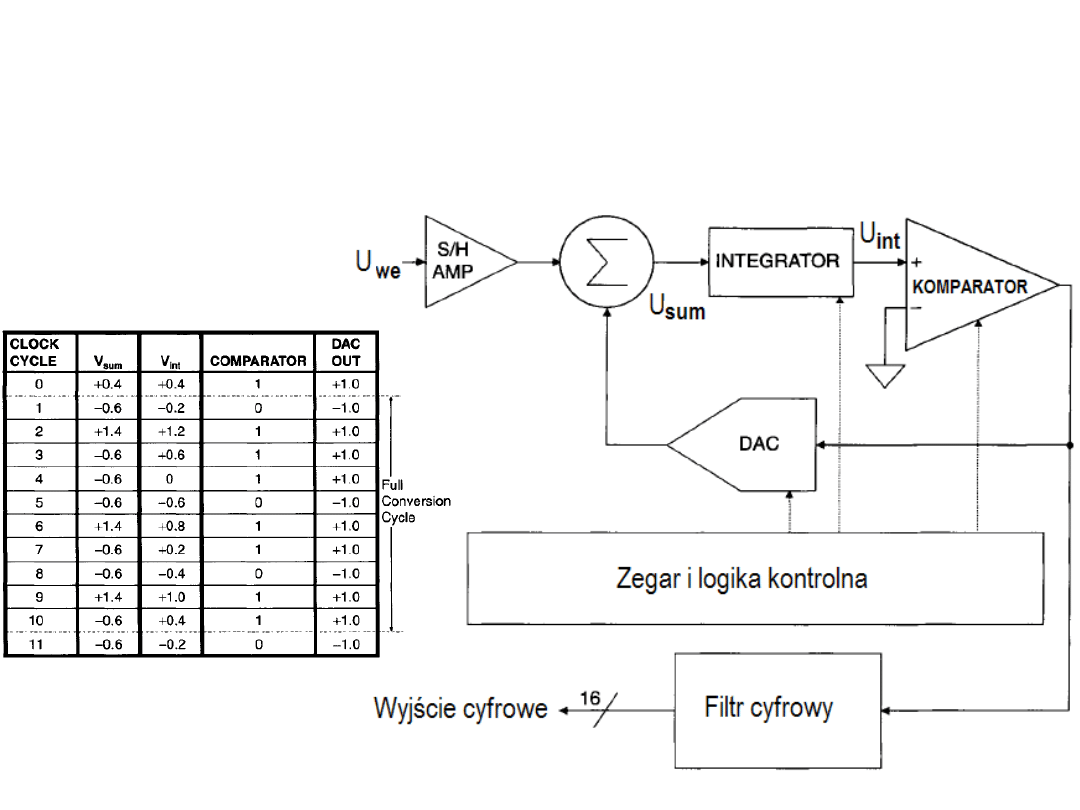
Przetworniki sigma-delta (delta-sigma) to tanie przetworniki
ADC o dużej rozdzielczości wykonywany w technologii
CMOS (stosowany np. w systemach „super audio”).
Przykłady prostych pomiarów wielkości
elektrycznych
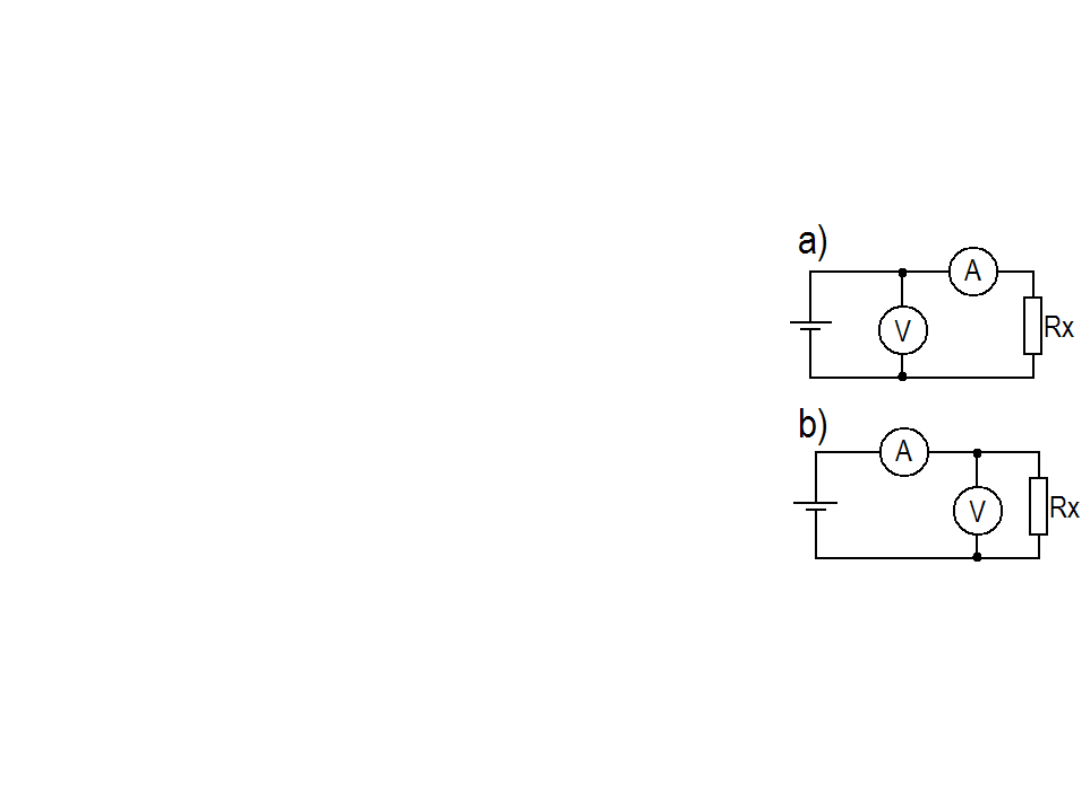
Techniczny pomiar rezystancji polega na jednoczesnym
zmierzeniu napięcia na zaciskach rezystora i natężenia prądu w
rezystorze a następnie obliczeniu rezystancji z prawa Ohma.
Dwa możliwe warianty podłączenia mierników
(woltomierza i amperomierza) pokazują
rysunki a i b. W przypadku „a” pomiar napięcia
na Rx jest obarczony dodatkowym błędem
wynikającym z ze spadku napięcia na
amperomierzu „A”. A w przypadku b pomiar
natężenia prądu w Rx jest obarczony
dodatkowym błędem wynikającym z prądu
płynącego przez woltomierz V. Dysponując amperomierzem i
woltomierzem o wewnętrznych rezystancjach przykładowo R
A
≤
1
Ω
i R
V
≥
10
6
Ω
z łatwością dostrzegamy, że do pomiaru wartości
Rx większych od 1000
Ω
dokładniejszy jest wariant z rys. „a”
natomiast do pomiaru Rx o wartościach mniejszych od 1000
Ω
lepszy będzie wariant „b”.
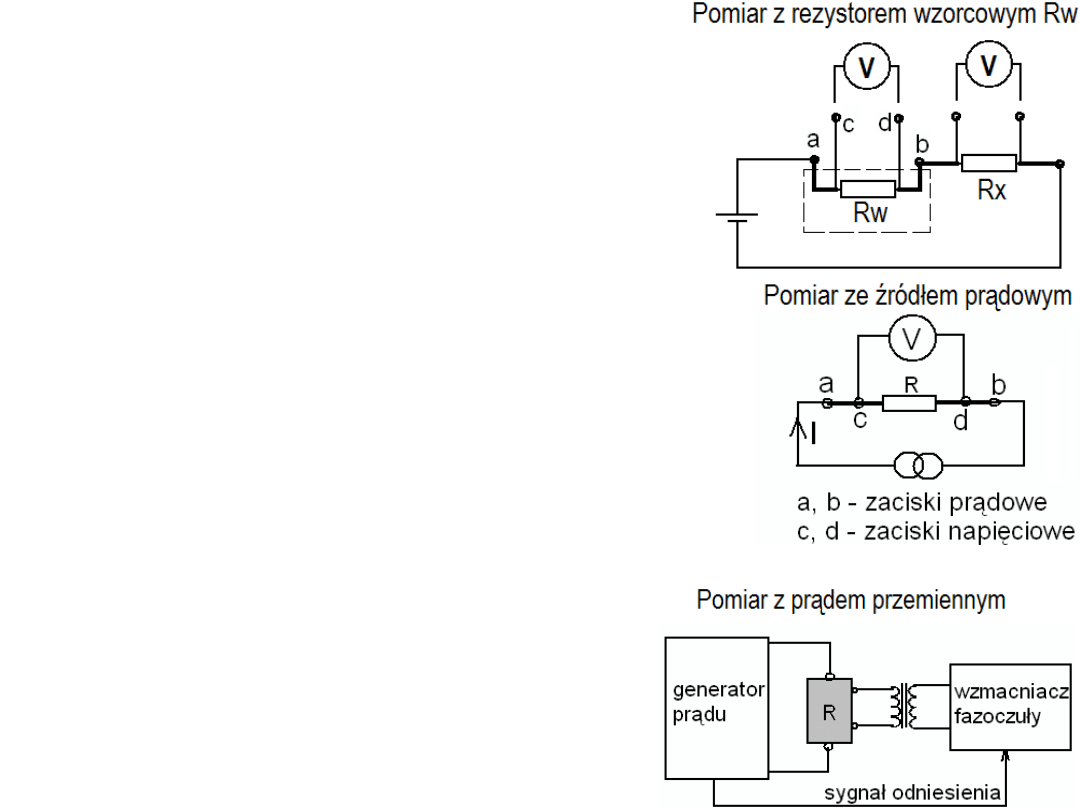
Pomiar małych oporności
Przy pomiarze małych rezystancji bardo ważne
staje się wyeliminowanie oporności styków i
doprowadzeń.
Można to uczynić w układzie z czterema
zaciskami (dwoma prądowymi i dwoma
napięciowymi) wówczas woltomierz „nie łapie”
niepożądanych spadków napięć na stykach i
doprowadzeniach prądu.
Dla wyeliminowania sił termoelektrycznych
należy w pomiarze zastosować prąd przemienny
i wykorzystać wzmacniacz fazo-czuły. (ang.
Lock-in amplifier).
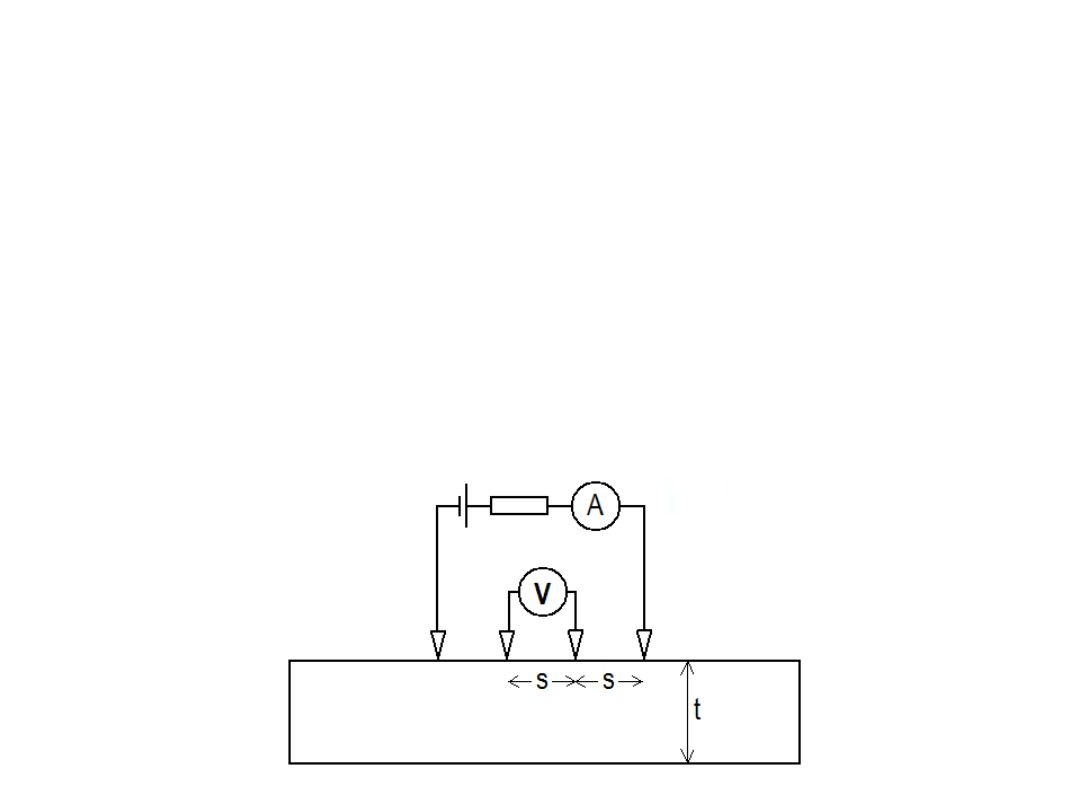
Cztero-kontaktowa metoda pomiaru rezystancji
(właściwej) materiałów półprzewodnikowych
Schemat do pomiaru tą metodą pokazany jest na rysunku. Woltomierz V
mierzy skok potencjału między dwoma wewnętrznymi z czterech punktów
kontaktowych rozmieszczonych w odstępach „s” na powierzchni materiału
badanego. Prąd elektryczny w materiale wymuszany jest obwodem
zawierającym dwa zewnętrzne kontakty punktowe.
Gdy grubość „t” materiału jest dużo większa od odstępów elektrod „s”: t >> s to
ρ
≅
2
π
s(V/I).
Gdy grubość „t” materiału jest dużo mniejsza od odstępów elektrod „s”: t << s to
ρ
≅
(
π
t/ln2)(V/I).

Oscyloskopy.
Oscyloskopy to najbardziej rozpowszechnione przyrządy przeznaczone do
obrazowania sygnałów elektrycznych. Wyróżnia się oscyloskopy analogowe oraz
cyfrowe (są też oscyloskopy analogowo-cyfrowe i analizatory sygnałowe).
Oscyloskopy służą do obserwacji i rejestracji sygnałów elektrycznych, nawet kilku
jednocześnie. Oscyloskop wykorzystywany jest też do badania przebiegów rozmaitych
wielkości fizycznych (po ich zamianie na sygnał elektryczny). Oscyloskopy są często
stosowane do uruchomiania i diagnozowania nawet bardzo skomplikowanych układów
elektrycznych i elektronicznych. W oscyloskopie wyróżniamy cztery podstawowe
systemy: system wyświetlania, odchylania w pionie, podstawa czasu i system
synchronizacji. Zakończeniem systemu wyświetlania jest ekran lub lampa
oscyloskopowa, na której ekranie wyświetlany jest obraz badanych wielkości
fizycznych. Schemat blokowy prostego (jednokanałowego) oscyloskopu analogowego
wraz ze szkicem lampy oscyloskopowej zamieszczono na rysunku poniżej (następna
strona). Dla uzyskania świecenia luminoforu w lampie oscyloskopowej konieczne jest
wytworzenie wiązki elektronowej, w której energie kinetyczne elektronów wynoszą
kilka do 20 keV. Oznacza to, że w oscyloskopach starszego typu (z lampą
oscyloskopową) wytwarzane są napięcia do około 20 kV!
Najważniejsze parametry: Rozmiary ekranu, Pasmo częstotliwości, Liczba kanałów,
Czas narastania, Rozdzielczość, Czułość, Maksymalne napięcie wejściowe. W
oscyloskopach cyfrowych – głębokość pamięci i szybkość próbkowania,
Analogowy oscyloskop 2-kanałowy.
Badany sygnał jest po wzmocnieniu
kierowany bezpośrednio do odchylania
wiązki elektronowej przemieszczającej się po luminoforze
ekranu co powoduje kreślenie świecącej linii obrazującej
przebieg sygnału. Mamy tu bezpośrednie obrazowanie
sygnału.
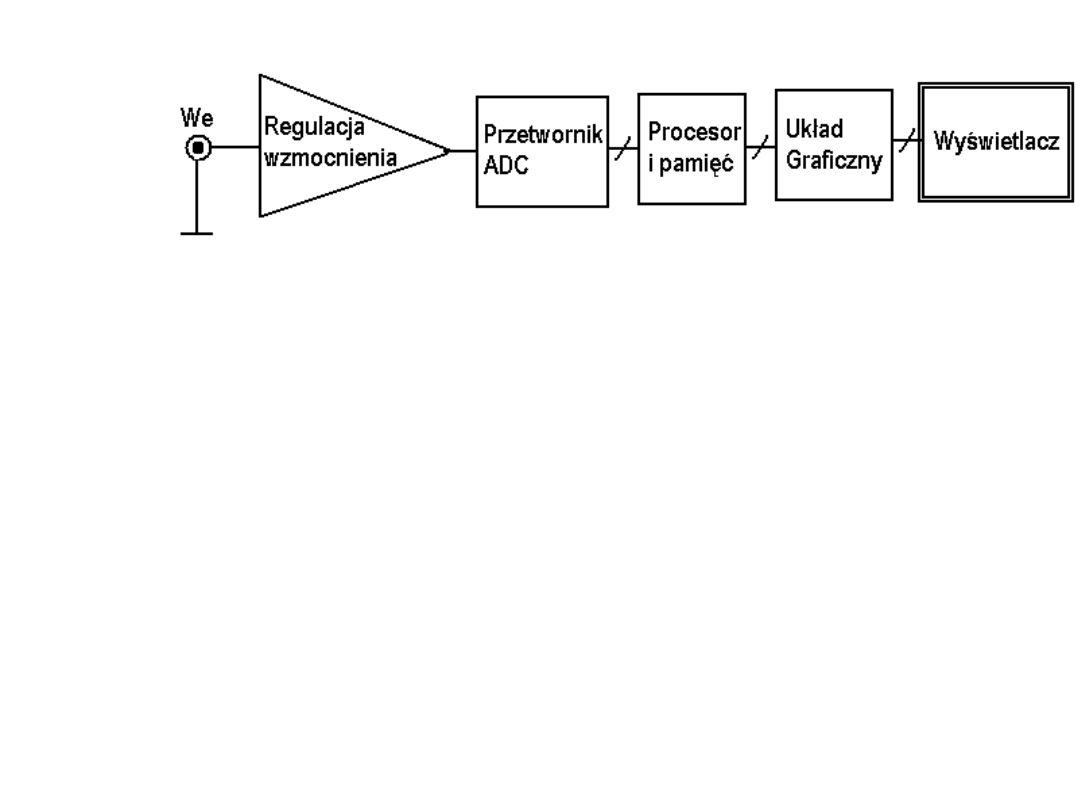
Cyfrowy oscyloskop 2-kanałowy.
Oscyloskop cyfrowy próbkuje sygnał elektryczny, dokonuje
konwersji wartości analogowych na cyfrowe przy pomocy
przetwornika analogowo-cyfrowego ADC, a następnie
zapamiętane cyfrowe wartości wykorzystuje do obrazowania
zbadanego sygnału. W oscyloskopach
cyfrowych stosowane są ekrany płaskie
np. ciekłokrystalicznym – LCD.
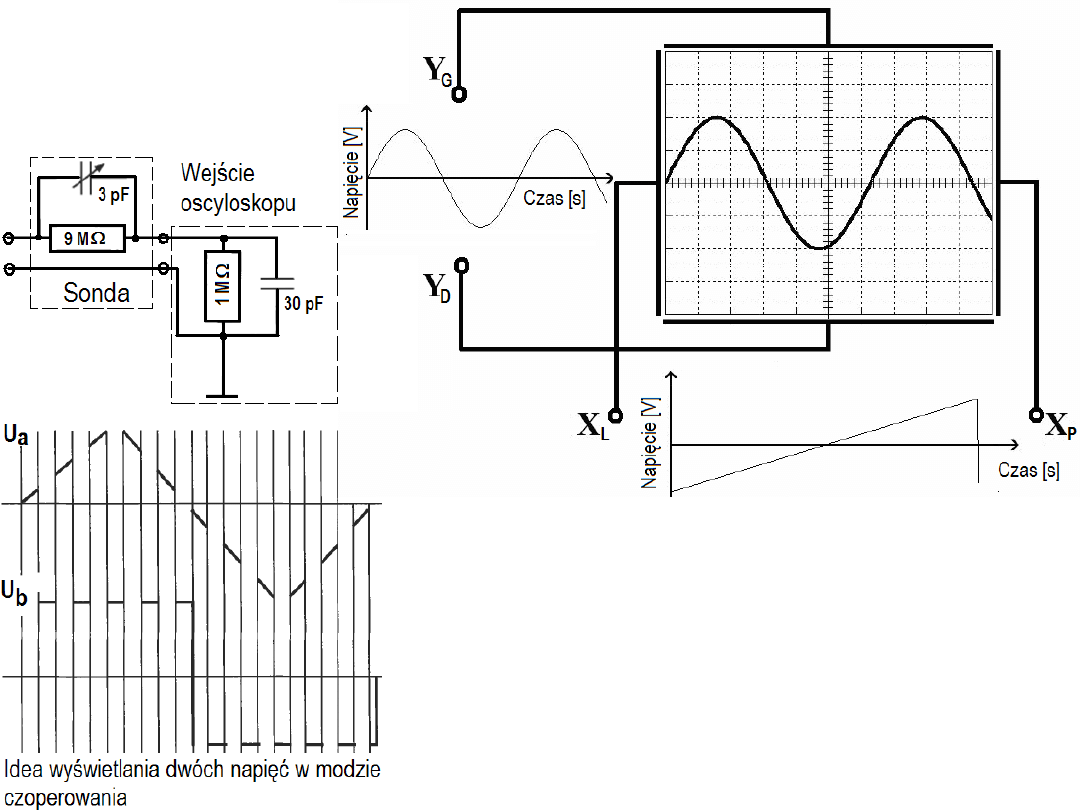
Idea wyświetlania napić
doprowadzonych do płytek
odchylających lampy
oscyloskopowej (Y w pionie i
X w poziomie).
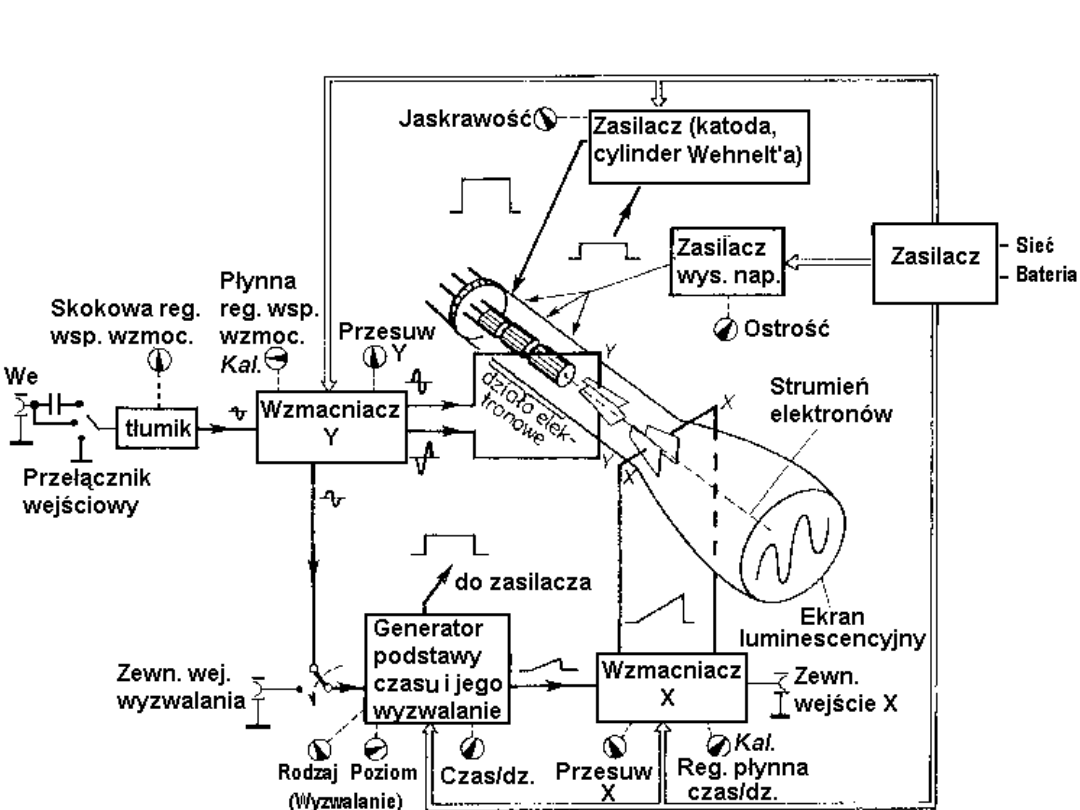
Uproszczony schemat oscyloskopu

Badany sygnał poprzez tłumik o regulowanym tłumieniu dociera do
wzmacniacza odchylania pionowego Y, na wyjściu którego uzyskuje się
wzmocniony (i ewentualnie uzupełniony o kompensacje składowej
stałej) przebieg napięcia sterujący odchyleniem wiązki elektronowej
poprzez płytki Y. Dla dokonania pomiaru wielkości napięcia należy
pamiętać, że opis przełącznika skokowego (np. 1V/działkę,
10mV/działkę czyli 1V/cm, 10mV/cm itd.) jest aktualny tylko przy
skręceniu regulacji ciągłej w pozycję “kalibr” tj. pozycję kalibracji. Na
powierzchni ekranu oscyloskopu znajduje się podziałka w postaci kratek
i kresek. Tu jedna działka = 1 cm a nie 2 mm! Opisy przełączników przy
gniazdach wejściowych: AC – oznacza, że wejście przyjmuje tylko
sygnał zmienny (sprzężenie pojemnościowe), DC – oznacza, że wejście
przyjmuje również składową stałą, GND – oznacza, że sygnał jest
odłączony a wejście jest zwarte do masy. Aby obraz na ekranie lampy
był stabilny tj. aby wiązka elektronowa periodycznie powtarzała ten sam
rysunek konieczna jest synchronizacji odchylania poziomego (podstawy
czasu) z badanym sygnałem.

Zatem część sygnału badanego kierowana jest do układu wyzwalania,
który steruje generatorem podstawy czasu i modulacją jaskrawości (tj.
intensywności wiązki elektronowej docierającej do luminoforu).
Pokrętłem
poziom
(ang. level lub trigger level) wybieramy wartość
napięcia sygnału, przy którym następuje wyzwalanie tj. rozpoczynanie
piło-zębnych impulsów dla płytek odchylania poziomego i impulsów
prostokątnych podawanych na cylinder Wehnelta (elektroda z otworem
otaczająca katodę) dla wypuszczania wiązki elektronowej. W przypadku
oscyloskopu wielokanałowego należy odpowiednim przełącznikiem
wybrać kanał, z którego pobierany jest sygnał synchronizujący (należy
wybrać sygnał najmocniejszy). W przypadku gdy mają być oglądane
sygnały bardzo słabe na wszystkich kanałach dobrą synchronizację
uzyskamy gdy odpowiedni sygnał podamy na wejście wyzwalania
zewnętrznego. Wejście wyzwalania zewnętrznego jest przydatne w
badaniach układów cyfrowych i przy obserwacji nieperiodycznych
sygnałów.

Podstawa czasu
może być wyzwalana narastającym zboczem (znak
+) lub opadającym zboczem sygnału (znak - ). W śród rodzajów
wyzwalania można wymienić: a) normalne, b) automatyczne, c)
sygnałem telewizyjnym, d) jednorazowe. Szybkość ruchu plamki w
kierunku osi X można zmieniać w szerokim zakresie. Należy pamiętać,
że opis przełącznika skokowego (np. 1s/cm czy 10ns/cm itd.) jest
obowiązujący tylko przy ustawieniu pokrętła regulacji ciągłej w pozycję
kalibr. W oscyloskopach wielokanałowych (zwykle dwu-kanałowych
lub czterokanałowych) zastosowane są przełączniki elektroniczne
przełączające sygnały z kilu wzmacniaczy wejściowych na jeden
wspólny tor sterujący lampą oscyloskopową. Przełączniki te mogą mieć
dwa rodzaje pracy: a) praca przemienna (alternating) – przełączenie
odbywa się podczas ruchu powrotnego plamki; b) praca siekana
(chopped) – przełączenie odbywa się wielokrotnie podczas każdego
kreślenia plamką od lewego do prawego brzegu ekranu. Dla ochrony
przed uszkodzeniami należy unikać podawania napięć większych niż
kilkadziesiąt V na wejścia oscyloskopu a kabel sieciowy włączać tylko
do gniazda z dobrym (tj. sprawnym) uziemieniem
.

Brak obrazu badanego przebiegu lub plamki na ekranie
oscyloskopu może mieć następujące przyczyny: a) pokrętłem
przesuwu X lub Y przesunięto obraz poza obszar ekranu; b) przy
stałonapięciowym sprzężeniu podano na wejście Y (lub X) sygnał
o zbyt dużej wartości składowej stałej; c) podstawa czasu nie jest
wyzwalana; d) pokrętło jaskrawości skręcono do minimum.
W nowocześniejszych oscyloskopach cyfrowych instalowane są
liczne udogodnienia np. a) na ekranie pojawiają się napisy
informujące o aktualnych zakresach podstawy czasu, czułości itp.;
b) kursory (zwykle dwie pionowe i dwie poziome linie) ułatwiają
wyznaczenie czasu trwania wybranego fragmentu badanego
przebiegu, jego częstotliwości, fazy oraz zmiany napięcia; c)
stosowane są tzw.
ekrany dotykowe, u których wybór funkcji oscyloskopu
dokonuje się przez dotyk palcem odpowiednio opisanego miejsca
na ekranie.
Oscyloskop
cyfrowy
Dzięki szybkim przetwornikom analogowo-cyfrowym budowane są oscyloskopy
cyfrowe o częstotliwościach pobierania próbek ponad 1GHz
i paśmie przenoszenia ponad 10 GHz. Działanie takich oscyloskopów polega na
pobraniu n (np. 10
6
) próbek i zapisaniu ich w pamięci. Pracę układu kontroluje układ
mikroprocesorowy pozwalający na wielostronną analizę badanych sygnałów.
Oscyloskopy cyfrowe budowane są również jako karty komputerowe a także jako
kieszonkowe (wielkości kalkulatora z ekranem ciekłokrystalicznym) do celów
diagnostycznych w warunkach terenowych. Często oscyloskopy konstruowane są jako
oscyloskopy analogowo-cyfrowe. Zamiast lampy oscyloskopowej mogą być stosowane
kineskopy monochromatyczne lub kolorowe. W oscyloskopach tych dzięki cyfrowym
podstawom czasu (zliczanie impulsów zegara kwarcowego) możliwe są bardzo
precyzyjne pomiary relacji czasowych badanych sygnałów. Precyzja pomiaru wielkości
napięć zależy od długości słowa przetwornika A/D, które często są 8-bitowe i dające
dokładność 1/2
8
tj. 1/256 zakresu.

W oscyloskopach cyfrowych oprócz obserwacji sygnału na bieżąco
można oglądać sygnał zamrożony w pamięci nieprzetworzony lub
przetworzony układem mikroprocesorowym w dowolnie pożądany
sposób (wygładzony, uśredniony z wielu sekwencji, w postaci diagramu
zawartości harmonicznych, zróżniczkowany itd.). W oscyloskopie
cyfrowym zbieranie danych może zachodzić niezależnie od chwili
wyzwalania i przebieg może być zapamiętany w dowolnej (regulowanej)
relacji czasowej do impulsu wyzwalania. Zwykle tzw. rekord rejestracji
(tj. n zamrożonych w pamięci próbek) jest wielokrotnie dłuższy od
rekordu obrazowania na ekranie. Pozwala to swobodnie obrazować
dowolne fragmenty i szczegóły raz zarejestrowanego przebiegu.
Oscyloskopy cyfrowe dysponują wieloma funkcjami, których brak w
oscyloskopach analogowych. Np. czuwanie (baby-sitting) oscyloskopu
tak długo, jak długo nie pojawi się impuls wyzwalający, który
spowoduje zamrożenie w pamięci tylko interesującej części ciągle
próbkowanego sygnału z wyprzedzeniem czasowym takim jakie zostało
z góry ustalone. Należy zaznaczyć, iż wyprzedzenia czasowe
ograniczone jest głębokością pamięci natomiast opóźnienie czasowe
może być dowolne.

Analizatory sygnałowe są to przyrządy, podobnie jak
oscyloskopy cyfrowe, wyposażone w pamięć i realizujące wiele
funkcji. Najważniejszymi funkcjami są:
1) Uśrednianie sygnału dla polepszenia stosunku sygnał/szum.
2) Przedstawianie zniekształceń przebiegów sinusoidalnych w
postaci diagramu zawartości składowych harmonicznych (FFT).
Oglądając kształt samego przebiegu zdeformowanej sinusoidy
trudno jest ocenić stopień i przyczyny deformacji. Pokazanie
wielkości amplitud poszczególnych harmonicznych rozwiązuje
ten problem radykalnie.
3) Analiza pasm (np. pasm bocznych zmodulowanej fali nośnej)
4) Przedstawianie ewolucji sygnałów (w różnej skali czasowej).
5) Synteza złożonych sygnałów.
6) Przedstawianie różnorodnych statystyk.
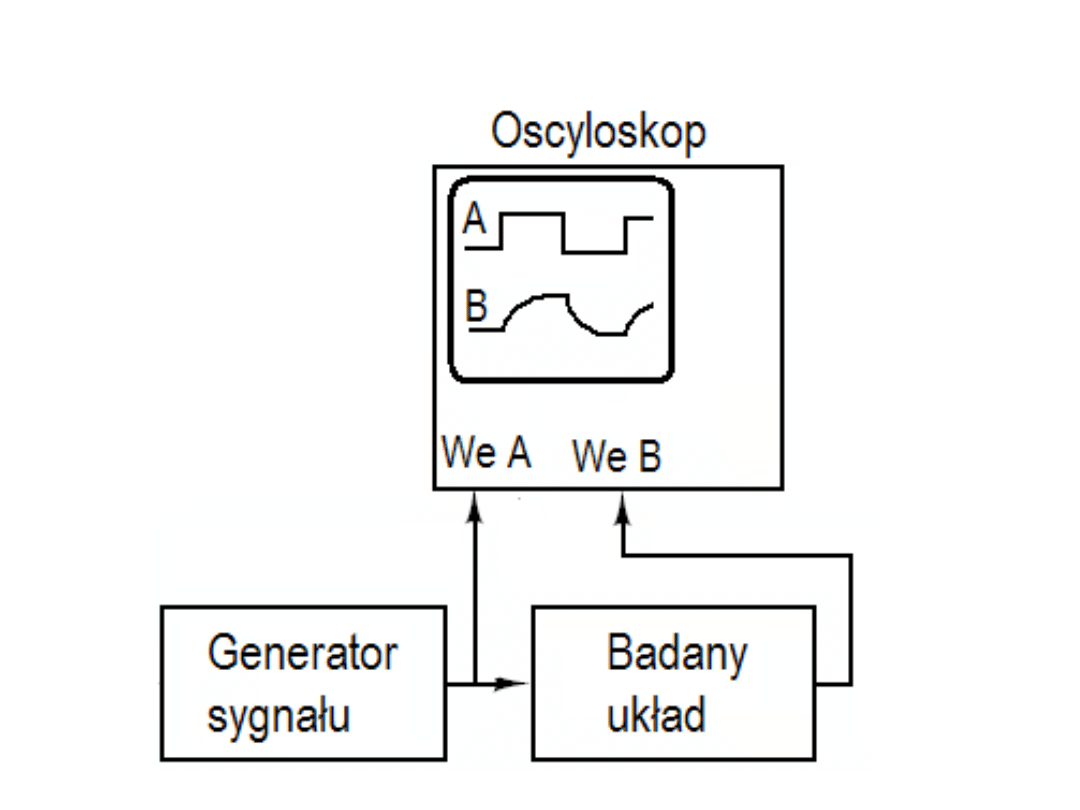
Oscyloskop jako przyrząd diagnostyczny
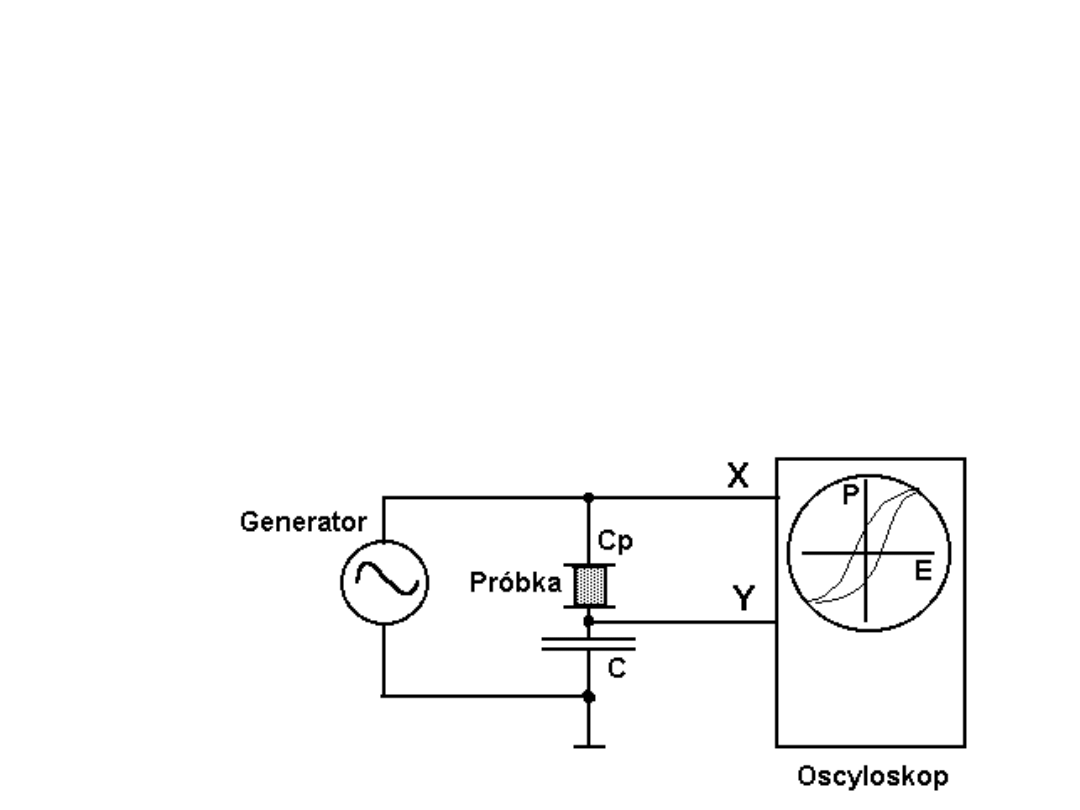
Układ Sawyera-Towera służy do badania zjawiska histerezy
dielektrycznej dielektryków. Na wejście X oscyloskopu (odchylanie
poziome) podane jest napięcie na próbce, z dobrym przybliżeniem bo C
>> Cp. Napięcie to jest proporcjonalne do wektora E (natężenia pola
elektrycznego) w próbce. Na wejście Y podane jest napięcie na
pojemności C. To napięcie jest proporcjonalna do ładunku Q na
okładkach kondensatora Cp (z badanym dielektrykiem), a zatem i do
wielkości wektora polaryzacji próbki P (P = Q/A). Zamieniając
kondensator C opornikiem można badać tzw. pętle prądowe próbek
ferroelektrycznych I = I(E).
Dla poprawienia stosunku Sygnał/Szum można uczynić badany sygnał
periodycznym. Np. periodycznie pobudzamy próbkę otrzymujemy
periodyczną odpowiedź próbki. Sygnał pobudzający próbkę musi
jednocześnie synchronizować podstawę czasu oscyloskopu cyfrowego.
Odpowiedzi są sumowane przez oscyloskop (wszystkie odpowiedzi w tej
samej relacji czasowej do impulsu pobudzającego). Przy sumowaniu
szumy nie mają szans się kumulować tak jak sygnał synchroniczny.
Uwagi o pomiarach i zakłóceniach
Zwykle wiedza o naturze źródła sygnału oraz o konfiguracji odpowiedniego
układu pomiarowego jest konieczna do osiągnięcia wolnego od zakłóceń
pomiaru.
Schemat blokowy typowego układu pomiarowego
W zasadzie w każdym z przedstawionych na schemacie bloków może pojawić
się zakłócenie (tj. niepożądany sygnał zewnętrzny) oraz szumy (generowane
przez elementy układu pomiarowego). W laboratoriach najczęściej jednak
usiłuje się zredukować zakłócenia poprzez optymalizacje połączeń
przenoszących mierzony sygnał (ekranowania, izolacje, stosowanie wejść
różnicowych i eliminowanie składowej wspólnej, równoważenie, uziemienie,
oddzielanie galwaniczne, detekcja selektywna i fazoczuła, filtracja itp.).

Najczęściej występującymi szumami są szumy cieplne, szumy śrutowe oraz szumy typu
1/f.
Szumy cieplne (szumy Johnsona), biorą się z drgań i ruchów cieplnych nośników
ładunku. Szumy te opisuje wzór Nyquista:
U =
√
(
4kTR
∆
f)
Gdzie: k – stała Boltzmana (1,38 1
-23
Ws/K) , T – temperatura, R – rezystancja,
∆
f –
pasmo częstotliwości.
Szum śrutowy powstaje przy przepływie prądu zwłaszcza przy przepływie przez
złącza półprzewodnikowe. Opisywany jest przez wzór Schottky’ego:
I
s
=
√
(2qI
∆
f)
Gdzie: q – ładunek nośnika (tu 1,6 10
-19
C), I – natężenie prądu,
∆
f - pasmo.
Szumy 1/f dominują w zakresie niskich częstotliwości. Na tego typu szumy składają
się przypadkowe zmiany gęstości ładunku, tzw. pełzanie zera (biorące się z rozmaitych
przyczyn: upływności, niestabilne styki, zjawiska elektrochemiczne itp.). Szum ten
opisywany jest przez tzw. widmową gęstość mocy S:
S = (U/
√∆
f)
2
Obniżenie szumów można uzyskać przez dobór odpowiednich (zwykle droższych)
elementów niskoszumowych, obniżanie mocy, obniżanie temperatury. Zwykle
ważniejszym w eksperymencie jest uzyskanie lepszego stosunku: sygnał/szum.
Oczywiście poprawę tego stosunku uzyskuje się również poprzez poprawianie
wielkości sygnału użytkowego.

Przy pomiarach małych sygnałów nawet komputer czy monitor komputerowy są
intensywnym źródłem sygnałów zakłócających. Przed przystąpieniem do
eliminowania zakłóceń należy, w miarę możliwości, ustalić i zlokalizować ich
źródła (poprzez zwieranie wejść, przemieszczanie elementów itp.).
Jednym z najpowszechniejszych źródeł zakłóceń jest szybkie przełączanie
dużych prądów (źle sterowane piece - włączenia i wyłączenia grzałek).
Inną przyczyną powstawania zakłóceń może być przemieszczanie się
przewodu powodujące zmianę strumienia indukcji magnetycznej
przenikającego przez dany obwód, co zgodnie z prawem Faradaya prowadzi
do powstawania zakłócającej siły elektromotorycznej. Dodatkowe zakłócenia
wnosi tutaj efekt tryboelektryczny, polegający na indukowaniu w danym
układzie napięcia (dochodzącego do kilkuset miliwoltów) wywołanego przez
odkształcanie dielektryka.
Pojemnościowe sprzęganie zakłóceń. Walka z tym typem przenikania
niepożądanych sygnałów polega na zmniejszaniu pojemności C miedzy
źródłem zakłóceń a odbiornikiem. Dobrym środkiem przeciwdziałającym
pojemnościowemu sprzęganiu obwodów jest ekranowanie elektrostatyczne.
Magnetyczne sprzęganie zakłóceń. Walka z tym typem przenikania
niepożądanych sygnałów polega na zmniejszeniu indukcyjności wzajemnej
obwodów. Zwykle pola magnetyczne indukują napięcia zakłóceń w pętlach
układów elektronicznych.

Czasem udaje się zredukować zakłócenie poprzez
dodanie sygnału zakłócającego o przeciwnej fazie.
Innym razem pomocne staje się stosowanie rozmaitych
filtrów przeciwzakłóceniowych. Generalnie należy starać
się separować silnie zakłócające kable energetyczne od
przewodów pomiarowych. Niekiedy jedynym sposobem
pozbycia się zakłóceń w pracowni pomiarowej jest
przeniesienie ich źródła (silnika, lasera impulsowego,
generatora, pieca itd.) do innego, odpowiednio
oddalonego i najlepiej ekranowanego pomieszczenia.
Należy unikać uziemiania układu w więcej niż
jednym punkcie. Unikamy w ten sposób spadków
napięć na kablach uziemiających i pochodzących od
znacznych i niekontrolowanych prądów płynących w
uziemieniach.
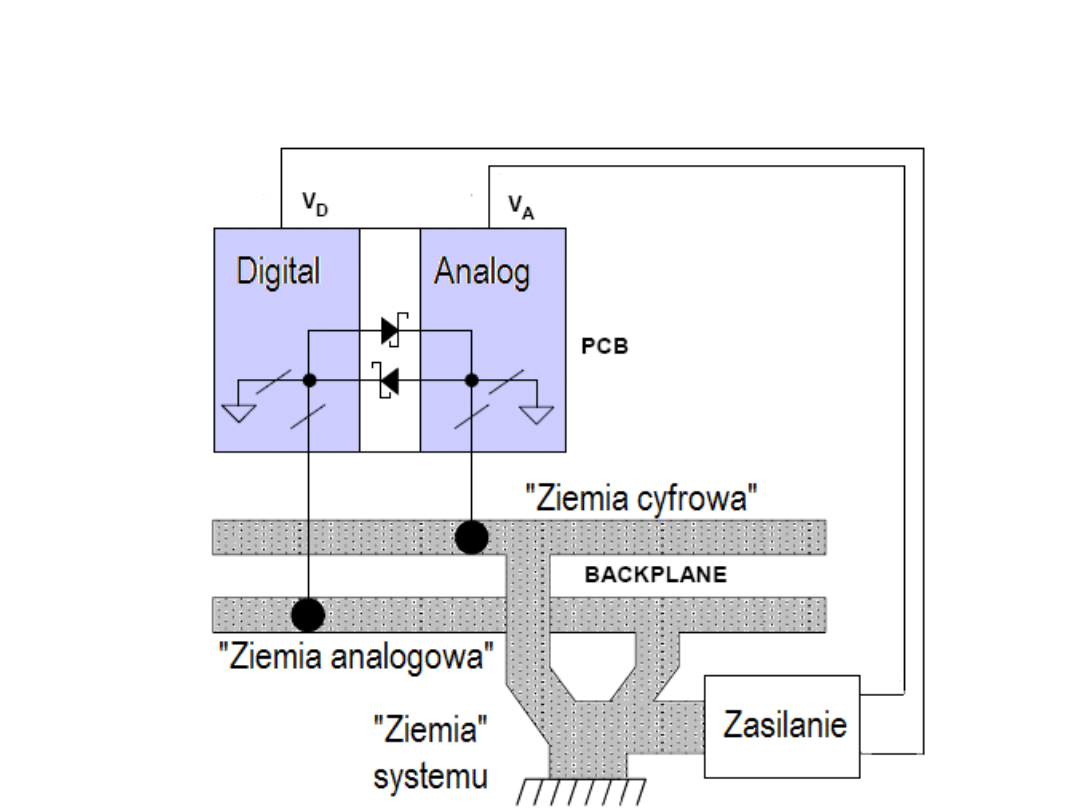
Obowiązuje też zasada separacji ziemi czułych układów
analogowych od ziemi zakłócających obwodów cyfrowych.
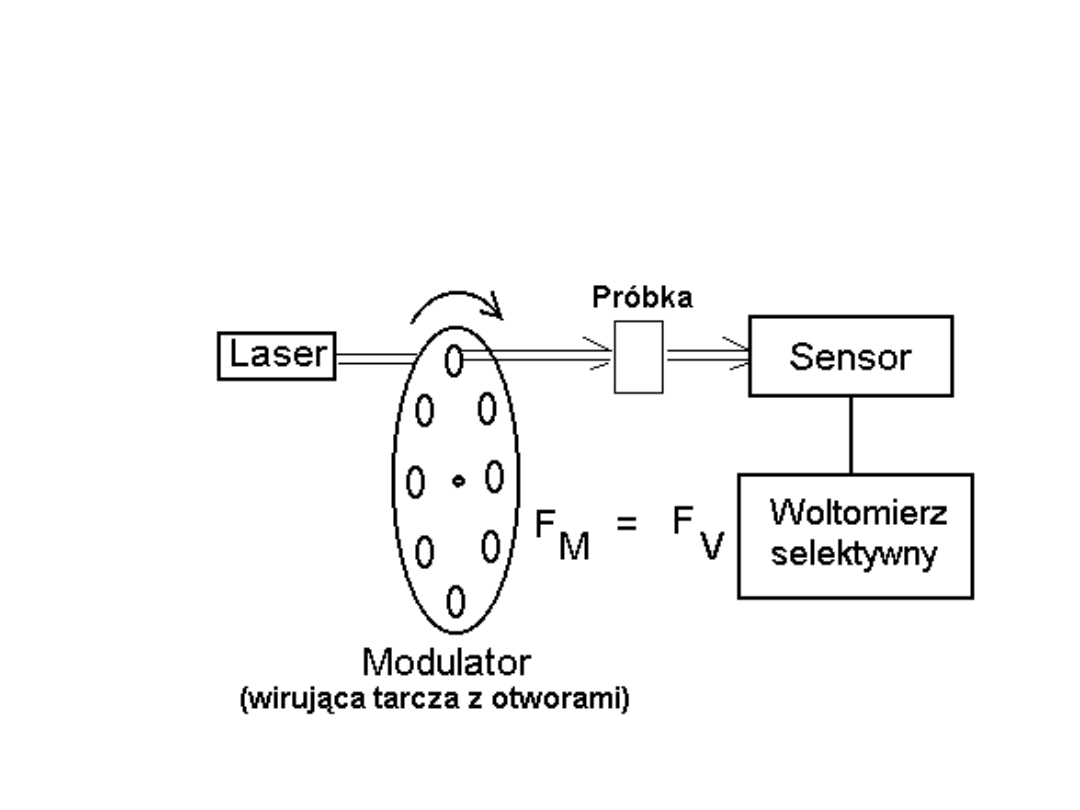
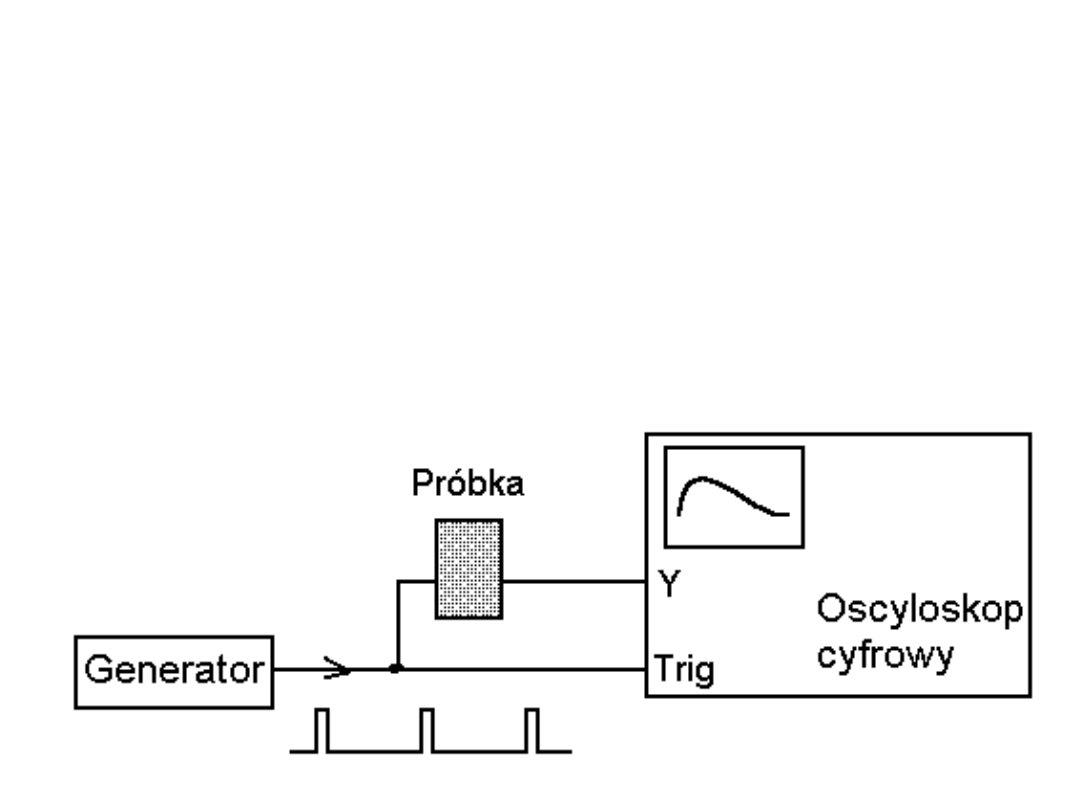
Uzmiennianie sygnału z pomocą modulatora
Jednym ze sposobów pomiaru słabych i zatopionych w szumach
sygnałów stałych lub wolnozmiennych jest tzw. uzmiennianie
sygnału.Woltomierz mierzy tylko sygnał z wąskiego pasma
częstotliwości zawierającego częstotliwość z jaką jest pobudzana próbka
(lub jej harmoniczną np. 2f).

Pomiar częstotliwości/czasu
Częstotliwość f jest wielkością określającą szybkość pojawiania się periodycznych
zdarzeń i związana jest z okresem czasu T między tymi zdarzeniami relacją: f = 1/T.
Częstotliwość (i czas) jest wielkością, którą potrafimy mierzyć z największą
dokładnością nawet lepiej niż 1/10
12
(Amerykański wzorzec cezowy NIST7 wykazuje
dokładność
±
5
×
10
-15
.(
Zapewniają to oscylatory/zegary atomowe (np. cezowy czy rubidowy) oraz kwarcowe.
Atomowe wzorce czasu/częstotliwości poprzez komunikację radiową wykorzystywane
są do kalibracji rozmaitych oscylatorów i wzorców wtórnych. Kalibracyja poprzez
sygnały radiowe stosowana jest w wielu laboratoriach. Drogą radiową kalibrowane są
.również oscylatory w satelitach GPS i stacjach nadawczych RiTV
Liczniki
Mogą mierzyć zarówno częstotliwości sygnałów jak i interwały czasowe między
sygnałami (impulsami).
W zależności od typu licznika mamy możliwości pomiaru częstotliwości aż do
około 10
10
Hz i interwały czasowe od około 10
-11
do około 10
3
s.
Liczniki oczywiście mogą zliczać impulsy przychodzące w nieregularnych
odstępach czasowych. Przed kolejnym zliczaniem
należy zadbać o tzw. wyzerowanie (reset) licznika oraz zapewnić
właściwą amplitudę i kształt zliczanych impulsów.
Deformacje impulsów mogą prowadzić do błędów zliczania
i błędów pomiaru częstotliwości.

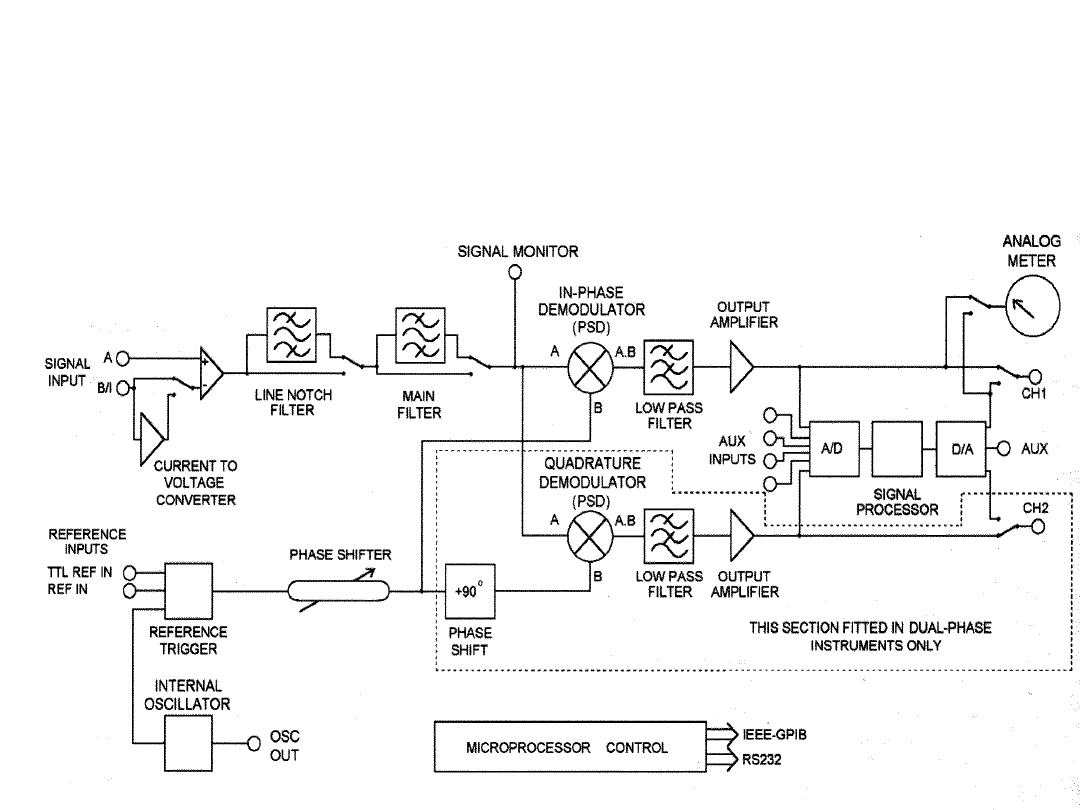
Woltomierz fazoczuły
(Lock-in amplifier, phase
sensitive detector).
Woltomierze fazoczułe (zwane też
wzmacniaczami homodynowymi z filtrem dolnoprzepustowym) służą
do pomiaru słabych, silne zakłócanych szumem, sygnałów. Sprawdzają
się nawet w sytuacji, gdy amplitudy sygnałów zakłócających są o kilka
rzędów większe od sygnału właściwego.
Zasada działania tych woltomierzy polega na ortogonalności napięć
sinusoidalnych o różnych częstotliwościach. Ortogonalność oznacza tu,
że iloczyn dwóch sinusoid o różnych częstotliwościach f1 i f2
wycałkowany (uśredniony) w czasie znacznie dłuższym niż okres
każdej z sinusoid wynosi zero. Natomiast, gdy częstotliwości i fazy
obu sinusoid są identyczne całka ich iloczynu wynosi połowę iloczynu
ich amplitud. Szum o przypadkowych częstotliwościach i fazach (nie
zgodnych
z sygnałem odniesienia) w wyniku uśrednienia jest eliminowany.
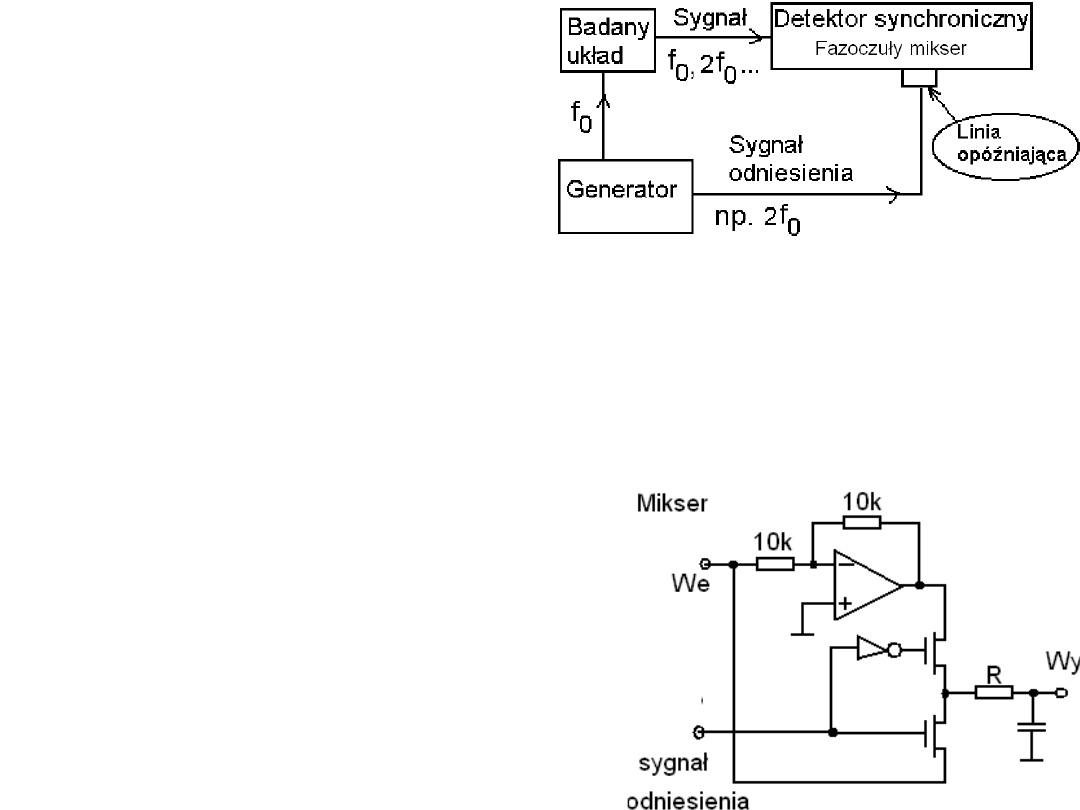
Pomiary fazoczułe
W tej metodzie mierzony jest sygnał o
częstotliwości identycznej z
częstotliwością pobudzania f
0
lub jej
częstotliwością harmoniczną f
n
w sposób
synchroniczny. To znaczy mierzony jest
albo sygnał w postaci jednej składowej zgodnej w fazie z sygnałem odniesienia.
Mamy wtedy do czynienia z Lock-in’em jednokanałowym. Albo mierzone są dwie
składowe: jedna zgodna w fazie z sygnałem odniesienia i druga o przesuniętej fazie o
90º (opóźniona o T/4). Mamy wtedy do czynienia z Lock-in’em dwukanałowym.
Można jednak przy pomocy regulacji względnego opóźnienia sygnałów doprowadzić
do ich idealnej zgodności fazowej (i wyzerować drugą, opóźnioną składową). Lock-
in wykonuje mnożenie sygnału wejściowego z sygnałem
odniesienia a sygnał wyjściowy jest
uśrednieniem tego iloczynu w czasie
równym dużej wielokrotności okresu sygnału
odniesienia. Przy pomocy wzmacniaczy
fazo-czułych można badać bardzo
słabe sygnał i przesunięcia fazy
sygnału (opóźnienia).
Wzmacniacz fazoczuły
) Lock-in analogowy
podobnie jak i cyfrowy mierzy iloczyn sygnałów: A - sygnał mierzony i B - sygnał
odniesienia. Gdy w eksperymencie do pobudzenia próbki stosujemy sygnał
ω
a jako
sygnał doniesienia stosujemy wyższą harmoniczną np. 2
ω
to uzyskujemy efekt
różniczkowania – bardzo ważny przy badaniu układów nieliniowych i w różnych
rodzajach spektroskopii. Lock-in 2-kanałowy pozwala również śledzić przesunięcie
fazowe.
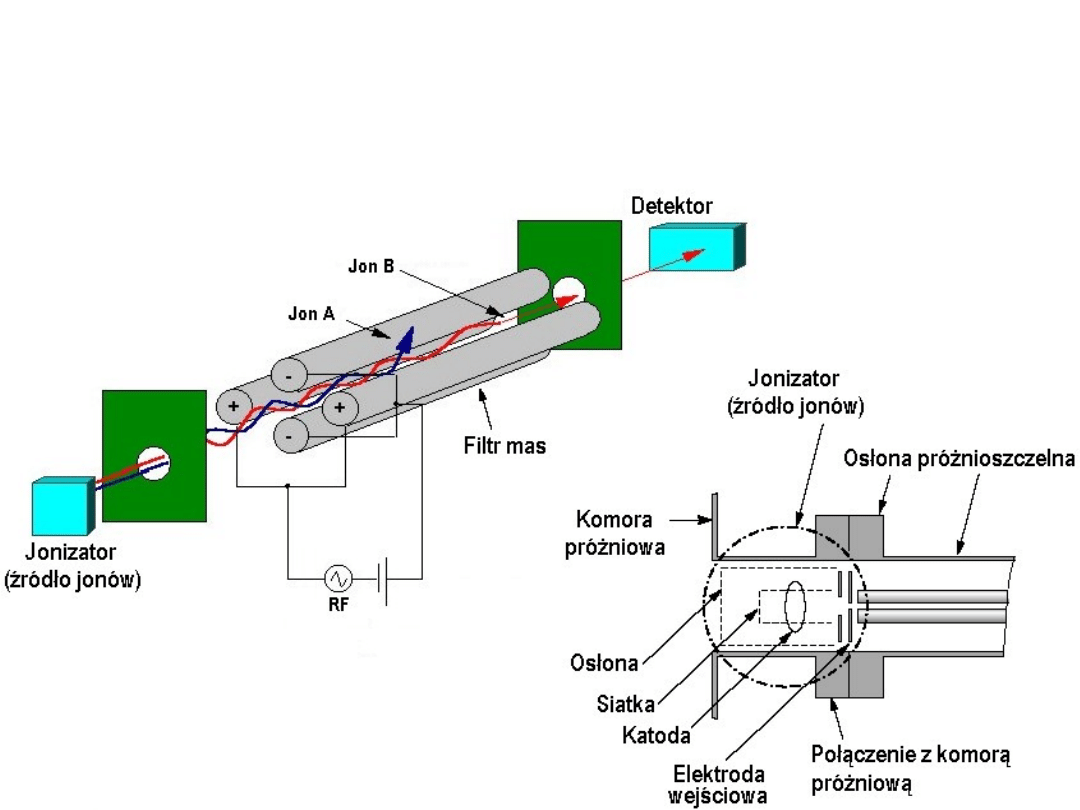
Analizatory składu gazu.
Analizator z kwadrupolowym filtrem mas.
Analizator wyposażony w powielacz elektronowy może mierzyć parcjalne ciśnienia od 10
-4
do 10
-14
Torr. Źródłem jonów jest jonizator w którym elektrony (prąd 2 mA, energia 70eV) z rozgrzanej
katody są przyspieszane do objętości otoczonej siatką o potencjale około 70 V. Oscylując w
obszarze siatki jonizują spotkane tam atomy i molekuły. Powstałe jony aby dostać się do detektora
muszą przejść przez otwór w elektrodzie wejściowej i przestrajalny kwadrupolowy filtr mas.
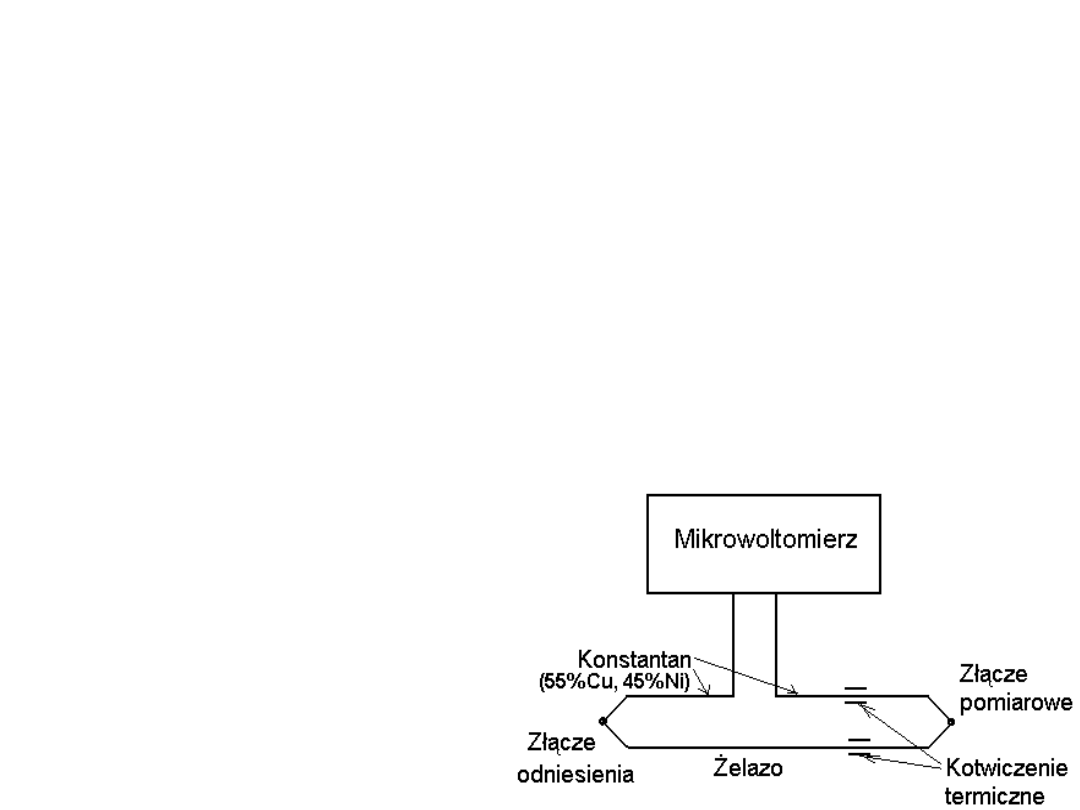
Termopary
Na złączu dwu różnych metali powstaje mały skok potencjału zależny od temperatury
złącza. Takie złącze nazywa się termoparą lub termoelementem. Złącze wykonuje się
przez zespawanie lub zgrzanie końcówek cienkich drutów z odpowiednich metali lub
stopów. Zwykłe skręcenie końcówek nie zdaje egzaminu. Termopary, w odróżnieniu
od wielu innych termometrów, mierzą różnicę temperatur (tj. temperaturę względną) i
wymagają dobrze określonego temperaturowo punktu odniesienia aby mierzyć daną
temperaturę. Klasyczny układ do pomiaru temperatury składający się z dwu złączy jest
pokazany na rysunku (układ różnicowy). Użycie tylko jednego złącza powiększa błąd
pomiaru o wartość pochodzącą z niedokładnego określenia temperatury zacisków
miliwoltomierza, która staje się temperaturą odniesienia dla takiego układu („z jedną
termoparą”). W przypadku układu klasycznego (tj. termopary różnicowej) wkład do
całkowitej mierzonej siły termoelektrycznej, pochodzący od zacisków miliwoltomierza,
jest zerowy tak długo jak długo temperatury obu zacisków są sobie równe. Dokładność
pomiaru temperatury zwykle wynosi
około 1
o
C. Warto pamiętać, że każdy
termometr mierzy temperaturę własnego
sensora. Zatem należy zadbać o
zrównanie temperatury złącza z
temperaturą próbki. Tzw. kotwiczenie
przewodów termopary w temperaturze
próbki jest tu bardzo pomocne.
Termopara w układzie klasycznym (zwana czasem termoparą
różnicowa) generuje siłę termoelektryczną, która jest zwykle
monotoniczną funkcją różnicy temperatur złączy. Większą dokładność
uzyskuje się przez kalibrację termopary (pomiar napięć termopary w
dobrze odtwarzalnych temperaturach) i przybliżenie złożoną funkcją
nieliniową (np. wielomianem) zależności temperatury od zmierzonego
napięcia termopary. Złącze odniesienia powinno być “zakotwiczone” w
stałej dobrze określonej temperaturze np. w mieszaninie wody z lodem w
termosie. Można też zastosować mały pojemnik o stabilizowanej
temperaturze i stosować go zamiast wody z lodem. Przy pomiarze
napięcia termopary należy pamiętać o zastosowaniu miliwoltomierza o
odpowiednio dużej oporności wejściowej by uniknąć błędu
wynikającego z obciążenia źródła sygnału o niezerowej oporności
wewnętrznej. Należy zaznaczyć iż liczne firmy produkują rozmaite
układy i przyrządy do pomiaru temperatury. Termopary dzięki małym
rozmiarom złącza pomiarowego i małej pojemności cieplnej
preferowane są w pomiarach temperatury małych obiektów i w
pomiarach punktowych.
Typy termoelementów (termopar), zakres temp. i ich średni wsp. temp.
T Miedź – Konstantan (tj. CuNi), 10 – 700 K, 42 µV/K
J Żelazo – Konstantan, 100 – 1000 K, 51.7 µV/K
E Chromel (tj. NiCr) – Konstantan, 100 – 1300 K, 60.9 µV/K
K Chromel – Alumel (tj. NiAl), 100 – 1600 K, 40.5 µV/K
S Platyna – Platyna/Rod 10%, 300 – 1800 K, 6.4 µV/K
R Platyna – Platyna/Rod 13%, 300 – 1900 K, 6.4 µV/K
B Platyna/Rod 6% – Platyna/Rod 30%, 300 – 1800 K, 6.4 µV/K
G Wolfram - Wolfram/Ren 26%, 300 – 3000 K,
D Wolfram/Ren 3% - Wolfram/Ren 25%, 300 – 3000 K,
C Wolfram/Ren 5% - Wolfram/Ren 26%, 100 – 3000 K, 15µV/K
Ważniejsze punkty kalibracyjne.
Punkty potrójne: 13.8033K – H
2
, 24.5561K – Ne, 54.3584 – O
2
, 83.8058K – Ar,
234.315K – Hg, 273.16K – H
2
O.
Oraz 302.9146K – p. topnienia Ga, 429.7485K – p. zestalania In, 505.078K – p.
zestalania Sn, 692.677K – p. zestalania Zn, 933.473K – p. zestalania Al, 1234.93K – p.
zestalania Ag, 1337.33K – p. zestalania Au.
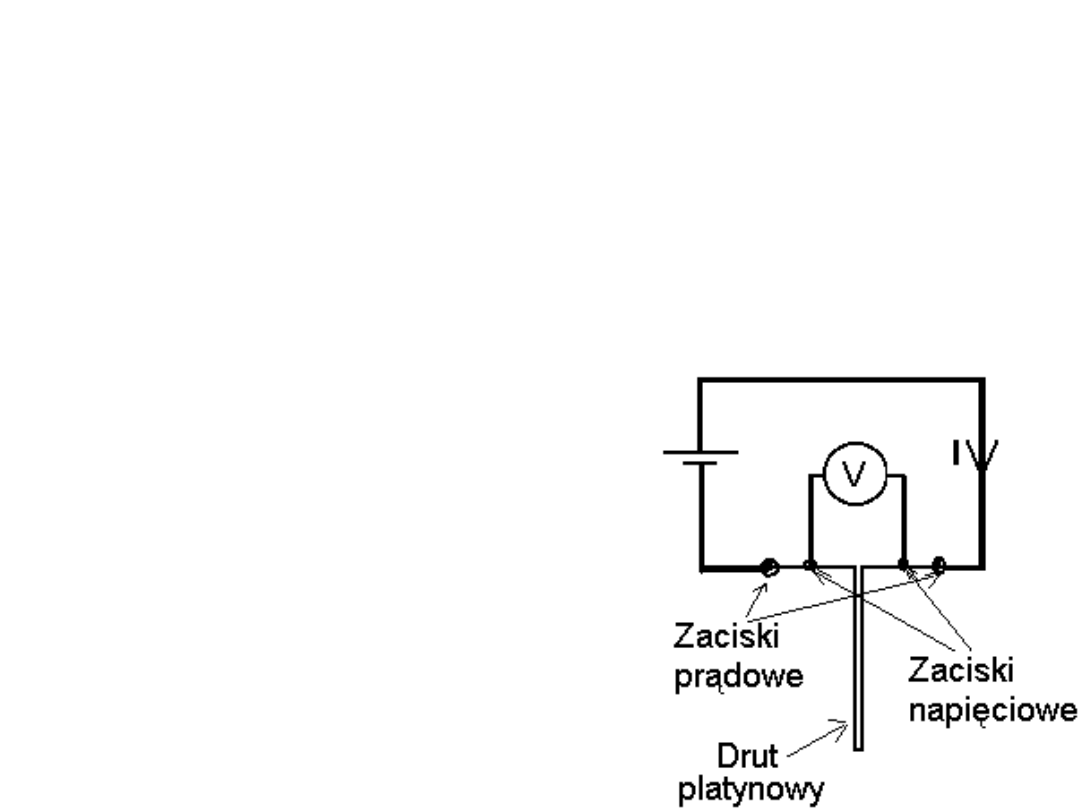
Innym przetwornikiem do pomiaru temperatury jest rezystancyjny
termometr platynowy. Jest to uzwojenie drutu z bardzo czystej platyny,
której współczynnik temperaturowy wynosi około 0.4% /
o
C. Odznacza
się dużą stałością w czasie a charakterystyki poszczególnych
egzemplarzy pokrywają się z krzywą standardową z błędem nie
większym niż 0.02 – 0.2
o
C. Stosowane są do pomiaru w zakresie -200
o
C
do +1000
o
C. Przy tego typu
termometrach należy unikać wpływu
oporności styków poprzez stosowanie
cztero-kontaktowej metody pomiaru.
Niepożądane dodatkowe skoki potencjału
występują na zaciskach prądowych,
przez które prowadzony jest znany i stabilizowany
prąd. Natomiast dokładną wartość skoku
potencjału na samym oporniku
mierzymy wykorzystując zaciski
napięciowe. (Tu obwód woltomierza
„nie łapie”niepożądanych napięć)
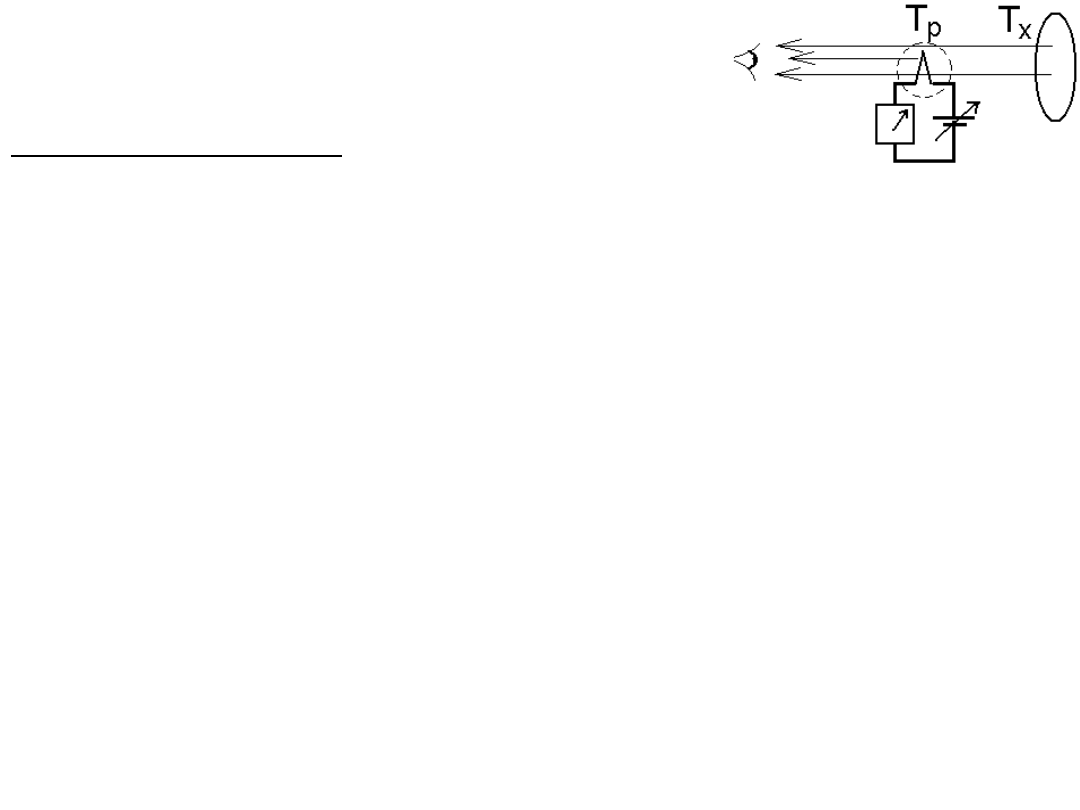
Pirometry
Klasyczny pirometr pozwala na
bezkontaktowy pomiar temperatury.
Jest to urządzenie umożliwiające obserwowanie żarzącego się obiektu
przez lunetkę i porównywanie jego koloru z kolorem świecenia
umieszczonego wewnątrz pirometru drucika żarowego. Wartość
temperatury odczytuje się ze skali pirometru po doprowadzeniu, w
wyniku zwiększania wartości prądu przez drucik żarowy, do jednakowej
jasności świecenia drucika i obserwowanego obiektu. Pirometrami
optycznymi można mierzyć temperatury w zakresie 750
o
C do 3000
o
C, z
błędem 4
o
C przy dolnej granicy zakresu i do 20
o
C przy jego górnej
granicy. Są produkowane pirometry pracujące w podczerwieni i
pokrywające zakres temperatur -30
o
C do 5400
o
C. Zastosowanie
odpowiednich sensorów, układów optycznych (z laserem do korekty
współczynnika emisyności) oraz układów elektronicznych zapewnia
automatyczny pomiar po wycelowaniu pirometru na badany obiekt.
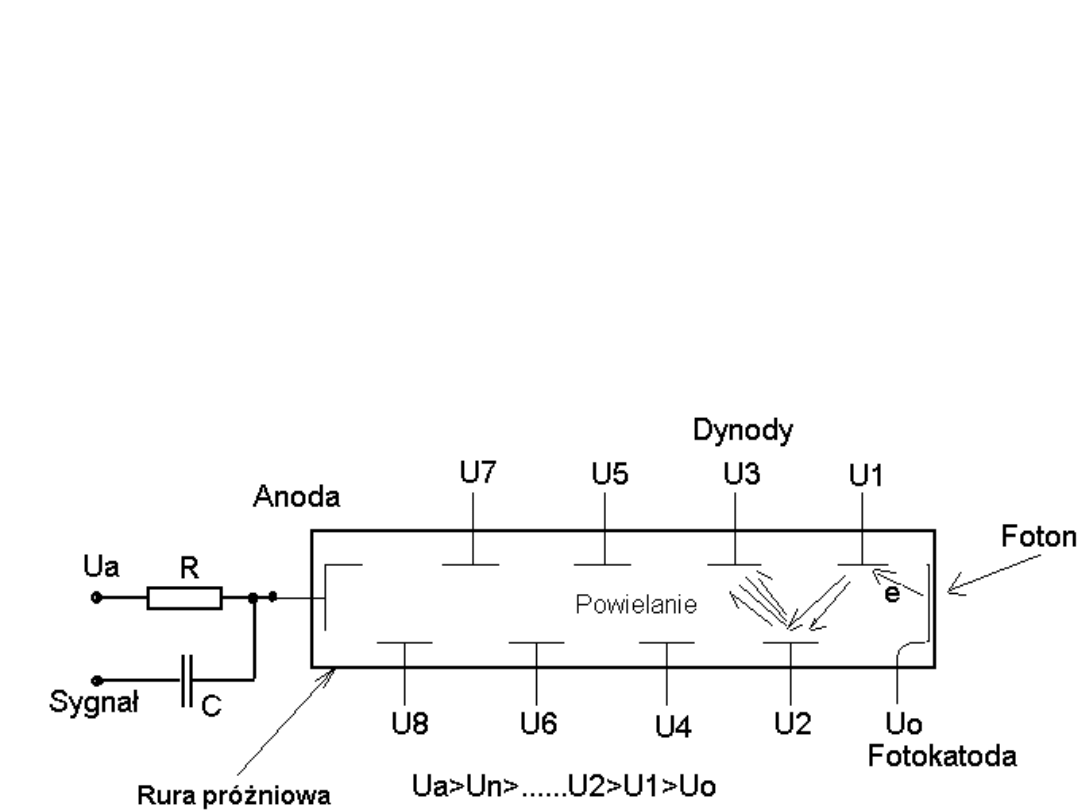
Fotopowielacz jest wyjątkowo przydatny do pomiaru b. małych natężeń światła. W rurze próżniowej fotopowielacza
foton światła padając na fotokatodę (powierzchnię pokrytą metalami alkalicznymi), wytrąca z niej elektron. Elektron
przyspieszany polem elektrycznym uderza w kolejną elektrodę, zwaną dynodą, powodując wybijanie elektronów wtórnych.
Te ponownie przyspieszane wytrącają dalsze elektrony z kolejnych dynod (typowe ilości dynod: 8 do 16). W rezultacie
jeden foton a następnie jeden elektron generuje porcję nawet 10
8
elektronów co pozwala na detekcję nawet pojedynczych
fotonów. Impuls napięcia wywołany taką ilością ładunku w jednej chwili docierającego do anody może osiągać wielkość
rzędu 10mV i jest dobrze rejestrowany układami elektronicznymi. Do zasilania elektrod fotopowielacza stosuje się zwykle
dzielnik napięcia w taki sposób aby między sąsiednimi dynodami panowało napięcie około 100V. Sprawność fotokatod
przekracza zwykle 25%. Do wyjścia fotopowielacza podłącza się wzmacniacz z integratorem lub licznikiem. Gdy natężenie
światła jest duże i impulsy ładunku na anodzie przestają być dobrze rozdzielone, wtedy zamiast zliczania impulsów mierzy
się prąd anody (do pomiaru takiego prądu zwykle stosujemy tzw. uzmiennianie np. przez periodyczne przerywanie wiązki
światła - czoperowanie). Należy pamiętać, że nawet w całkowitej ciemności w obwodzie anody fotopowielacza płynie
pewien niewielki prąd zwany “prądem ciemnym”. Powstaje on w wyniku termicznej emisji elektronów z fotokatody i z
dynod. Prąd ten można zmniejszyć do wartości poniżej 1 impulsu na sekundę obniżając temperaturę fotopowielacza.
Uwaga: fotopowielaczy z doprowadzonymi napięciami zasilającymi nie można wystawiać na światło dzienne, grozi to
pogorszeniem parametrów a nawet uszkodzeniem samego fotopowielacza (niszczące są zbyt duże natężenia prądów).
Fotopowielacze i powielacze elektronowe. (pierwsze fotopowielacze powstały w latach 1930-1934)
Fotopowielacze zwykle mogą zliczać fotony w szerokim zakresie długości fali 180 nm do 900 nm. Otwarte (bez
okienka i nie posiadające „własnej próżni”) fotopowielacze umieszczone w badawczych systemach próżniowych
mogą być używane do detekcji w znacznie szerszym zakresie - aż do promieniowania rentgenowskiego włącznie.
Układ dynod z anodą (bez fotokatody) nazywany powielaczem elektronowym stosowany jest do detekcji
elektronów i jonów (obu znaków). Sygnały napięciowe z fotopowielaczy i powielaczy elektronowych są zwykle
kierowane do liczników, integratorów lub fazo-czułych woltomierzy (fazo-czuły woltomierz tzw. „lock-in”
stosowany jest przy uzmiennianiu sygnału). W przypadku stosowania licznika lub integratora należy zadbać o to
aby amplitudy impulsów były większe od amplitudy szumu tak aby ustalając napięcie progowe detekcji (w
obwodzie dyskryminacji licznika lub integratora) miedzy amplitudą szumu a amplitudą sygnału można było
rejestrować sygnał bez zakłóceń. Problem ten staje się trudny gdy w laboratorium mamy czynne niektóre typy
laserów (Q-switched lasers) lub inne układy niewłaściwie (gwałtownie) przełączające dużą moc jak np. niektóre
piece do hodowli roślin. Uwaga: fotopowielacze i powielacze -elektronowe są zasilane wysokimi napięciami
rzędu 1 - 2 kV
niebezpiecznymi dla zdrowia i życia (praca przy wysokich napięciach wymaga doświadczenia, nigdy nie
pracuj sam!). Przy zestawieniu układu pomiarowego należy sprawdzić kształt i czas trwania pojedynczego
impulsu. Groźne są tzw. oscylacje-dzwonienia i zbyt długi czas trwania impulsu. Impulsy możemy kształtować
między innymi przez dobór stałej czasowej RC w obwodzie anody i dołączenie dodatkowego tzw.
ograniczającego kawałka kabla zakończonego opornikiem o małej oporności (<50
Ω
). Należy sprawdzić czy czas
narostu impulsu na anodzie powielacza jest krótszy od czasu propagacji sygnału przez ten ograniczający kabelek
(czas propagacji sygnału przez 0.5m kabla wynosi około 10ns).
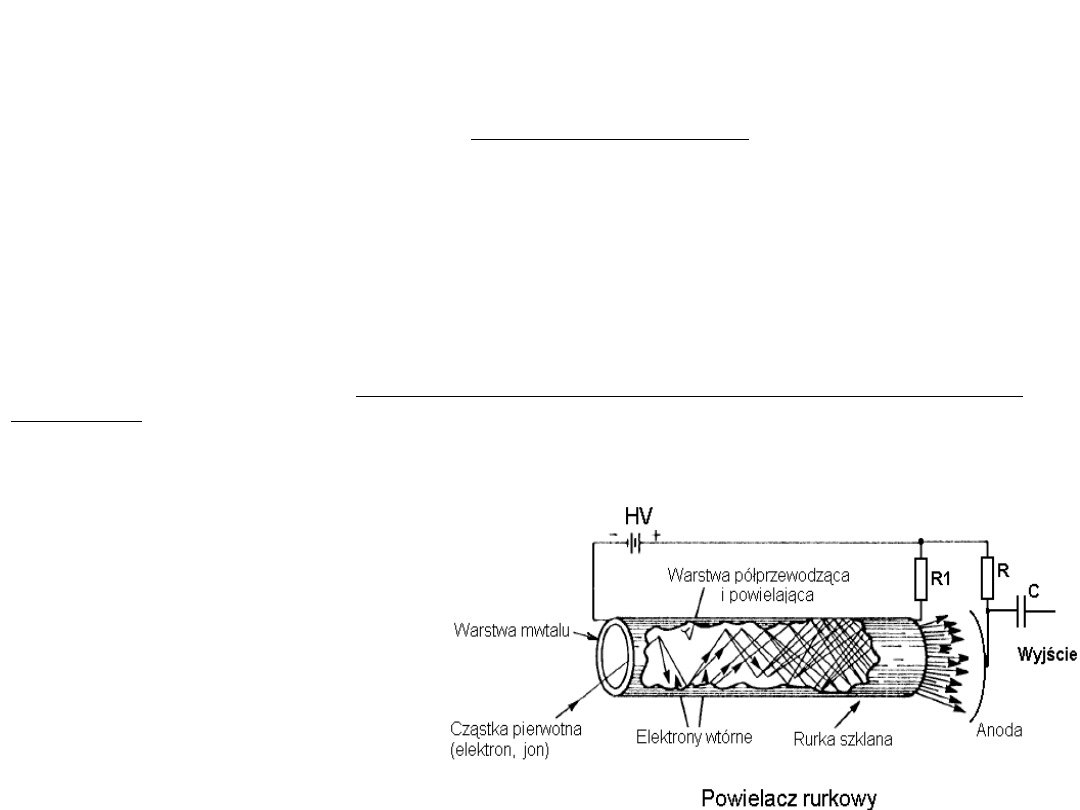
Powielacze rurkowe. Obecnie do detekcji
elektronów i jonów stosowane są
powielacze z tzw. ciągłą dynodą tj. powielacze
rurkowe „CEM” (channeltron electron
multiplier) szklane i nieco lepsze ceramiczne.
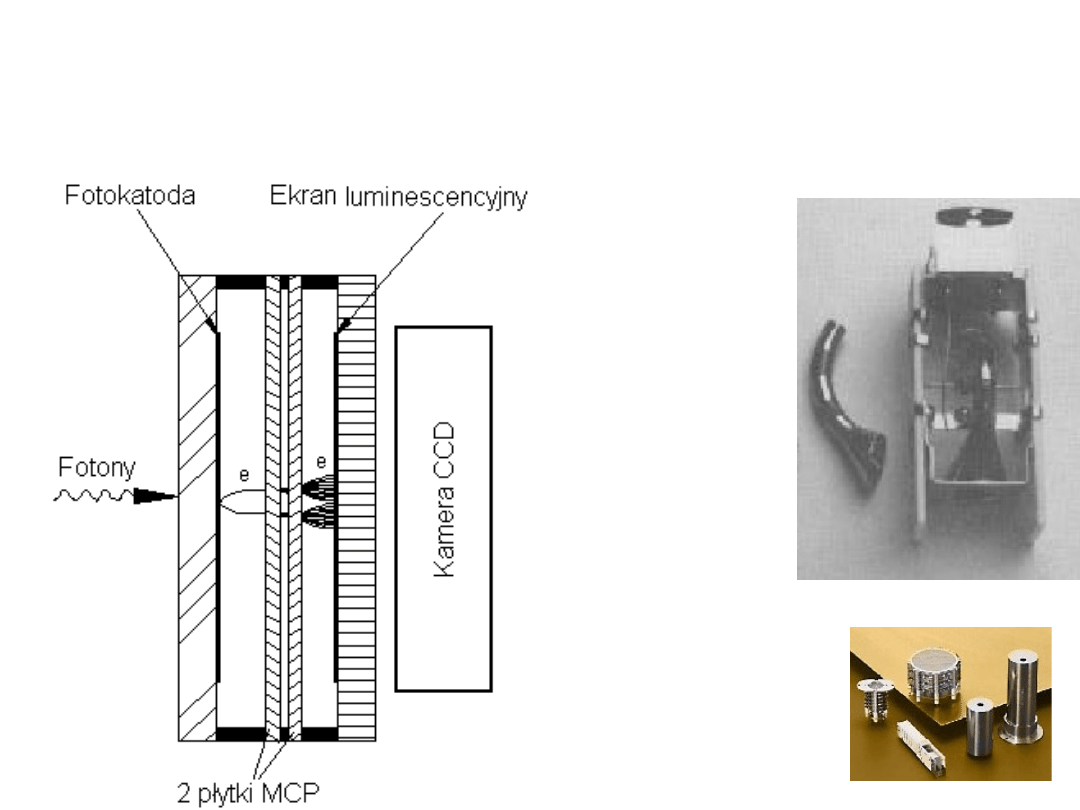
Natomiast do wzmacniania obrazu
stosujemy płytki „MCP” owzmocnieniu do 10
4
(Micro channel electron multiplier plates).
Fotopowielacze, powielacze i wzmacniacze obrazu.
http://www.burle.com/cgi-bin/byteserver.pl/pdf/ChannelBook.pdf
http://216.239.59.104/search?
q=cache:dWbIHOgD148J:www.proxitronic.de/prod/bv/eein.htm+plates+image+electron+mult
ipliers&hl=pl
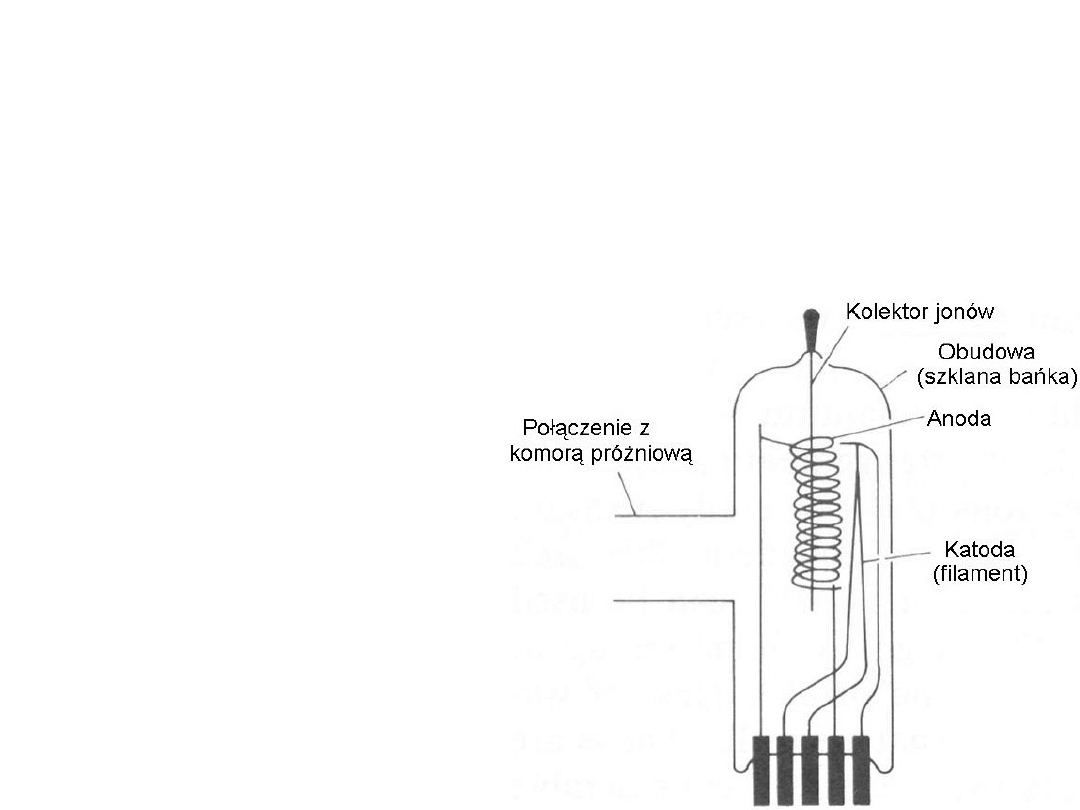
Głowica Bayarda-Alperta Do pomiaru ciśnienia w komorach
próżniowych najczęściej stosowane są głowice
jonizacyjne Bayarda-
Alperta (kiedyś w obudowie szklanej, obecnie metalowej). Gorąca
katoda emituje elektrony, które przyspieszane są do anody o
dodatnim potencjale (np.+300V). Elektrony jonizują napotkane
molekuły gazu resztkowego. Wyprodukowane jony zbierane są
przez kolektor o potencjale
bliskim 0V. Pomiar tego
jonowego prądu pozwala na
określanie ciśnień od 10
-3
do
10
-11
mm Hg (zanieczyszczenie
wnętrza komory przez dotyk
palcem wydłuża czas
uzyskiwania ciśnienia rzędu
10
-11
mm Hg!)

Komputerowe systemy pomiarowe
Kluczowym elementem w tych systemach jest tzw. interfejs.
W praktyce pomiarowej stosowanych jest wiele systemów interfejsowych, najczęściej:
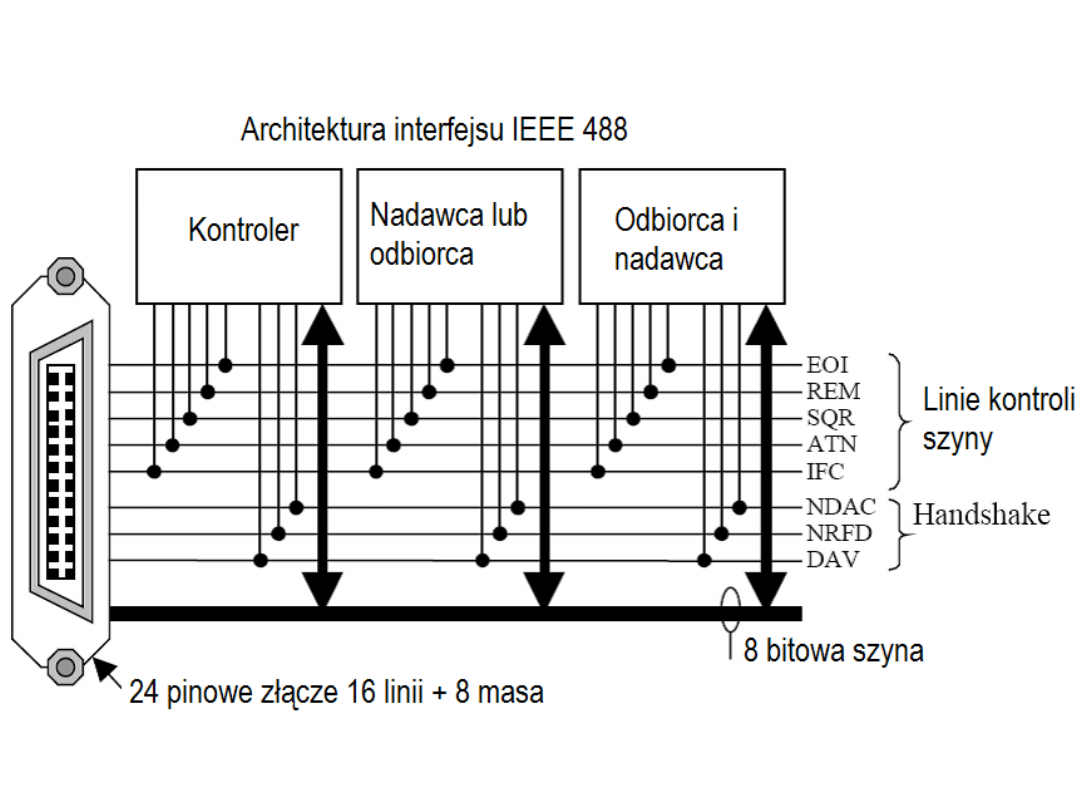
RS-232C, USB, RS-422, RS-485, CAMAC, IEC-625 (GPIB, IEEE-488), IEEE-1394,
I
2
C, Bluetooth i komputerowe karty rozszerzeń.
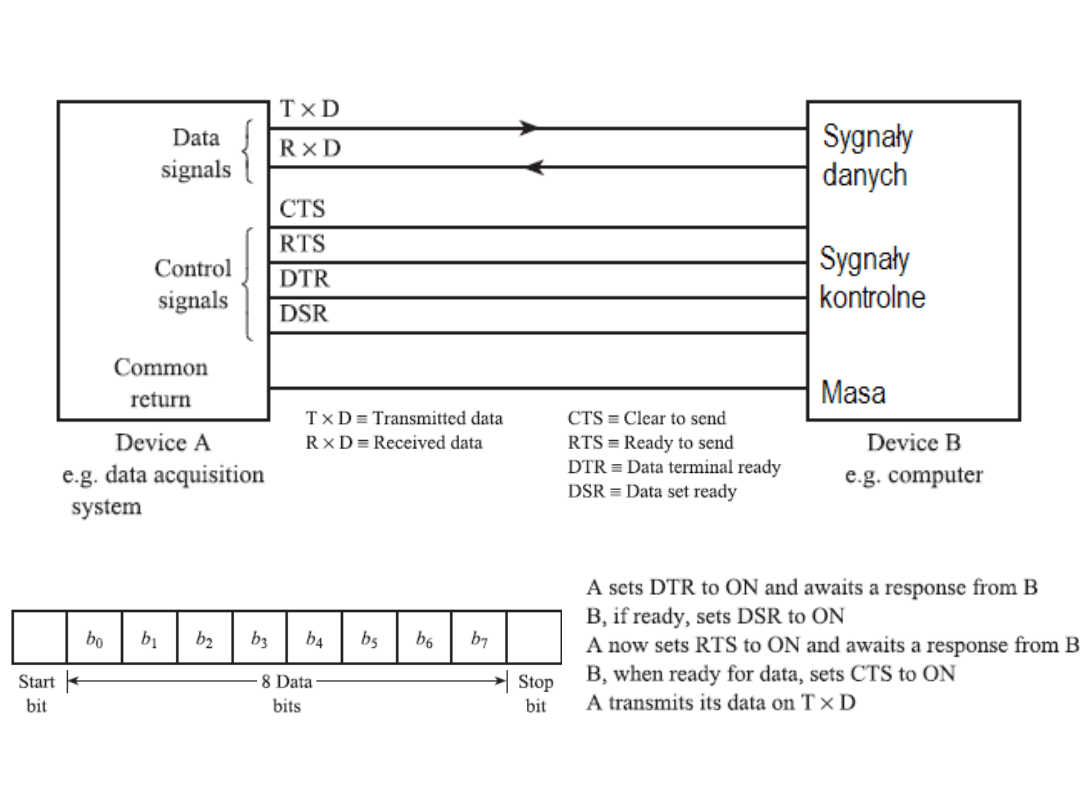
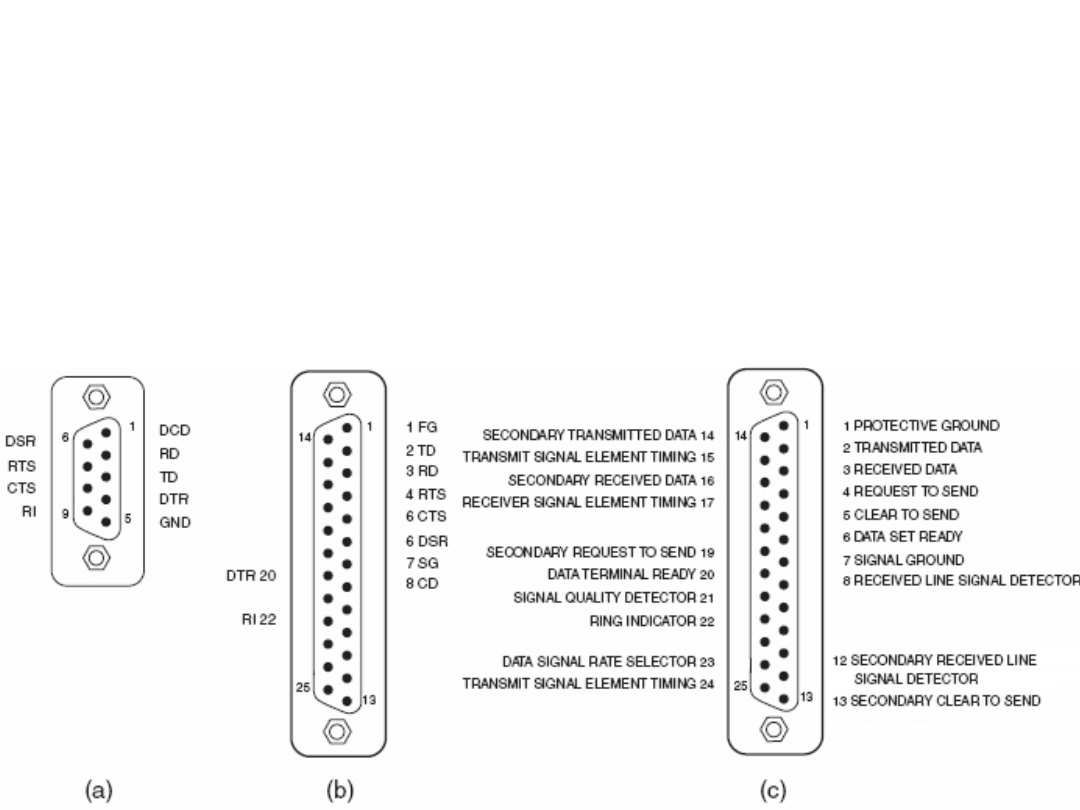
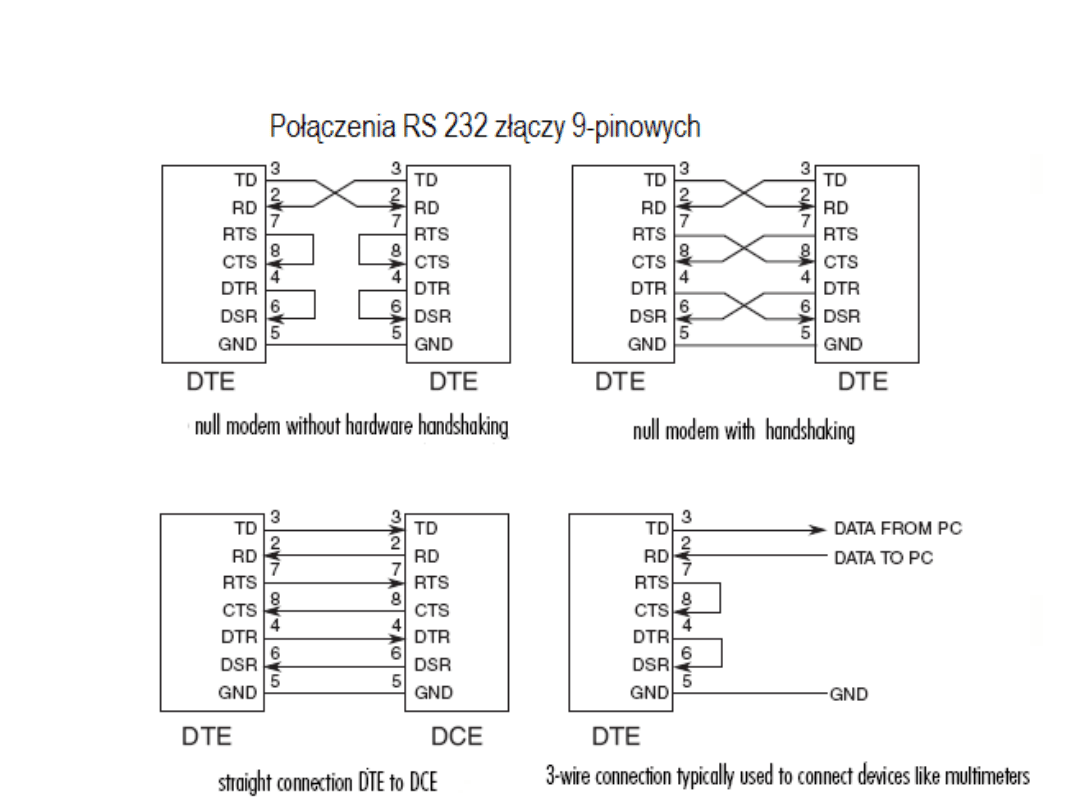
Standard RS-232 jest powolnym interfejsem szeregowym obecnie wycofywanym z
zastosowań i zastępowanym przez USB. Szybkość transmisji do 19200 bodów
(stosowane są tu kable z wtyczkami 9 lub 25 pinowymi). Transmisja danych odbywa
się szeregowo bit po bicie. Występują tu 2 rodzaje transmisji: synchroniczna i
asynchroniczna. Przy transmisji asynchronicznej tylko 7 linii jest używanych (dwie dla
danych – wysyłanych i odbieranych, cztery dla sygnałów kontrolnych i jedna masy).
Transmisja synchroniczna polega na przesyłaniu bloków danych (frame). W bloku po
ostatnim bicie poprzedniego znaku wysyłany jest pierwszy bit znaku następnego.
Synchronizację zapewniają specjalny znak początku bloku i inny specjalny znak końca
bloku. Transmisja synchroniczna jest szybsza od asynchroniczne ale też wymaga
bardziej złożonych układów dla poprawnego grupowania bitów w znaki.
Asynchroniczna transmisja polega na przesyłaniu pojedynczych znaków. Każdy znak
poprzedzany jest bitem startu, bity znaku zaczynają się od bitu LSB. Ponadto po bitach
znaku może występować bit zabezpieczenia poprawności transmisji.
USB (Universal Serial Bus). Tu szybkości transmisji są znacznie większe 1.5Mb/s do
480Mb/s.
RS 232
RS 232
RS 232
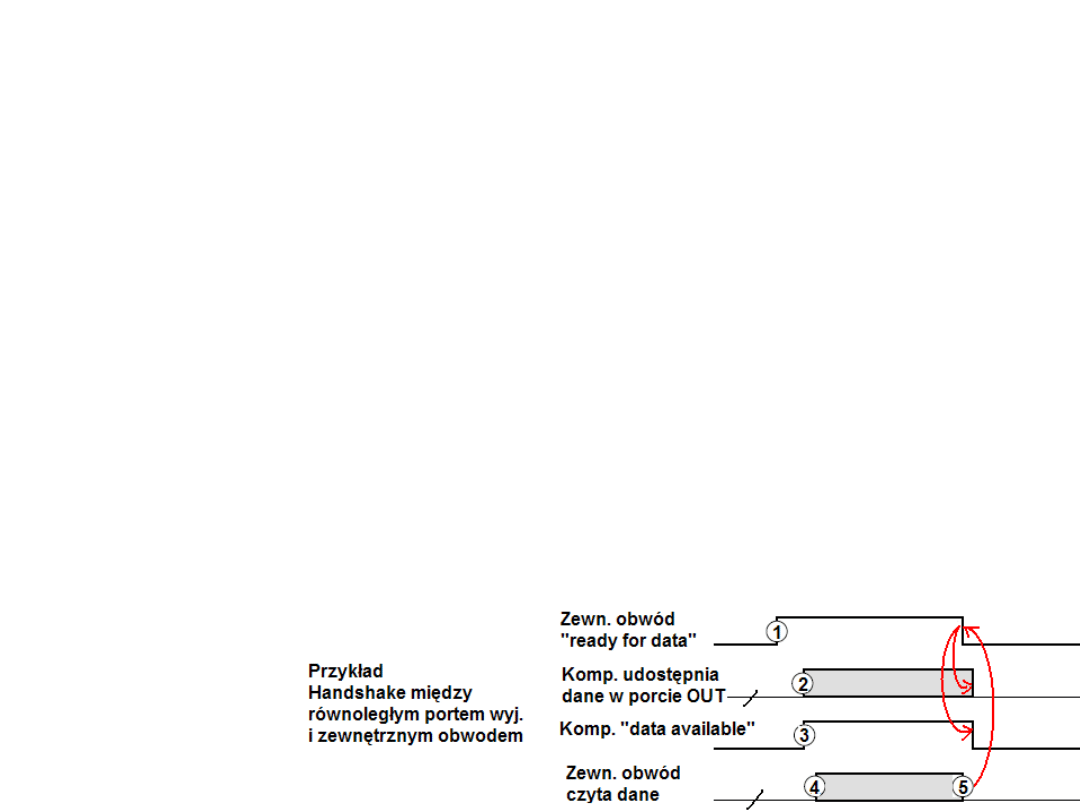
Handshaking (potwierdzanie)
Są to procedury komunikacji używane w celu:
i) zapewnienia, że nadawca i odbiorca są gotowe do transferu
danych,
ii) powiadomienia odbiorcy przez nadawcę kiedy dane są
gotowe,
iii) Powiadomienie nadawcy przez odbiorcę, że dane zostały
odczytane.
Handshaking, przy transmisji równoległej, wymaga
dodatkowych linii (np. linii „ready for data” i „data
available”).
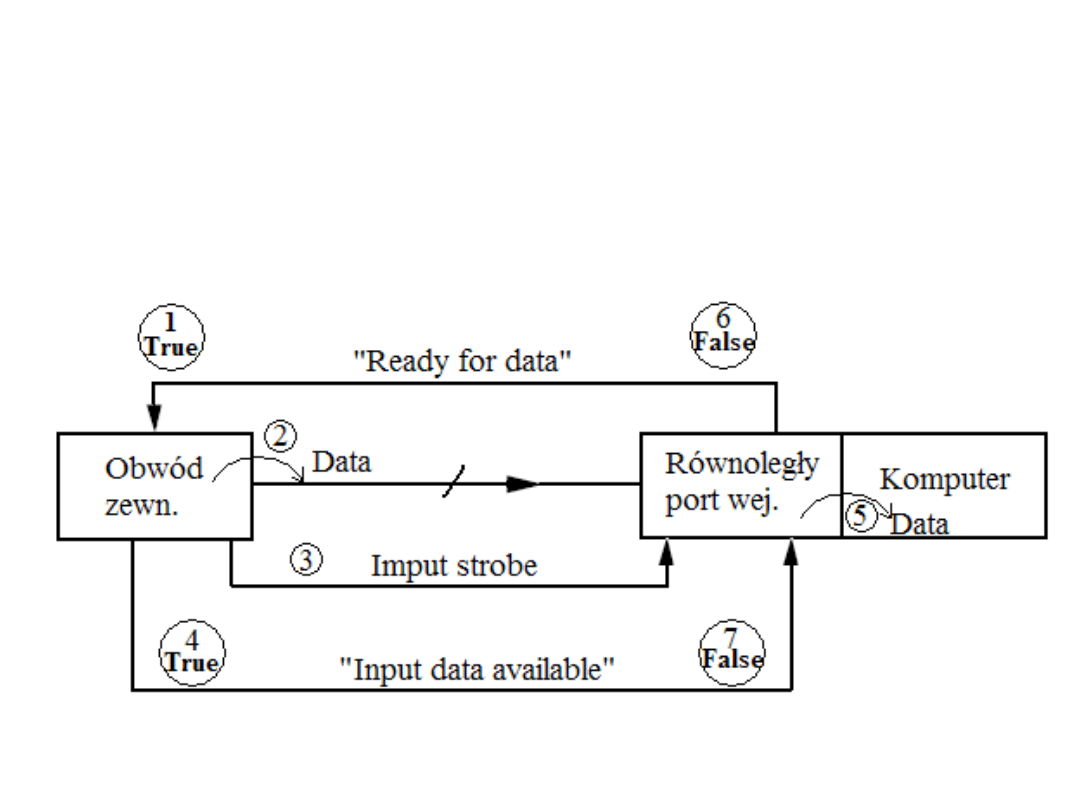
Przykład
Handshake w równoległym porcie
wejściowym.
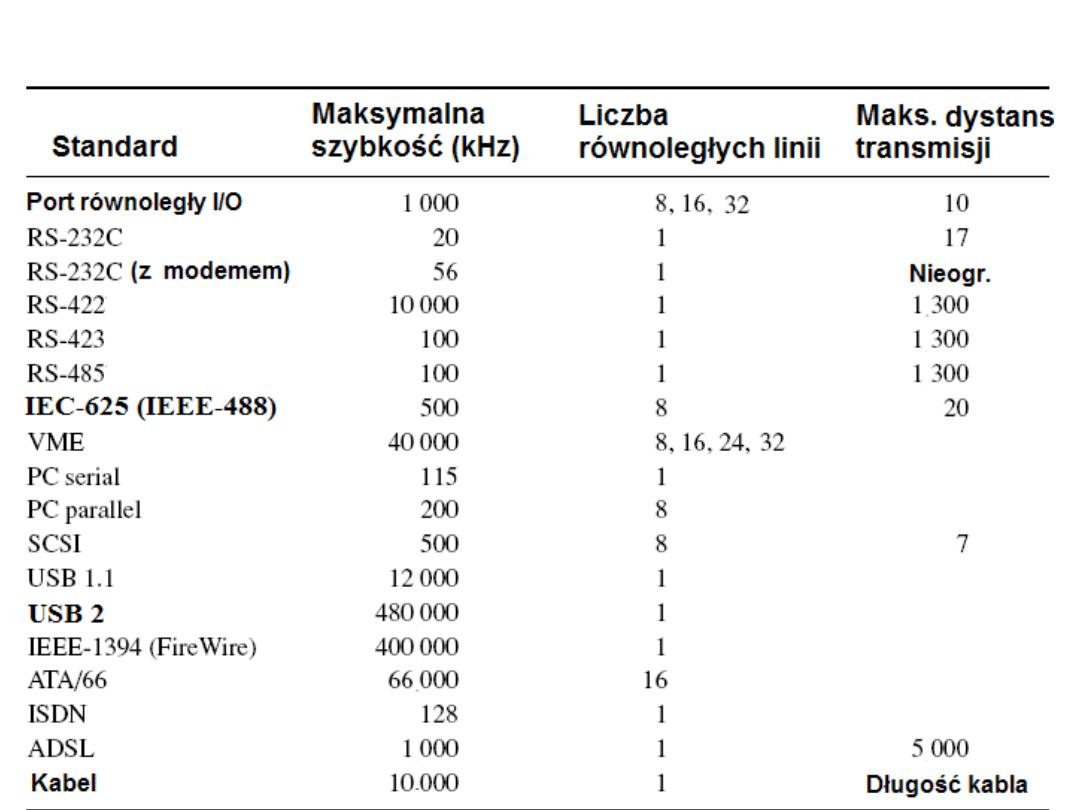
Porównanie opcji interfejsowych
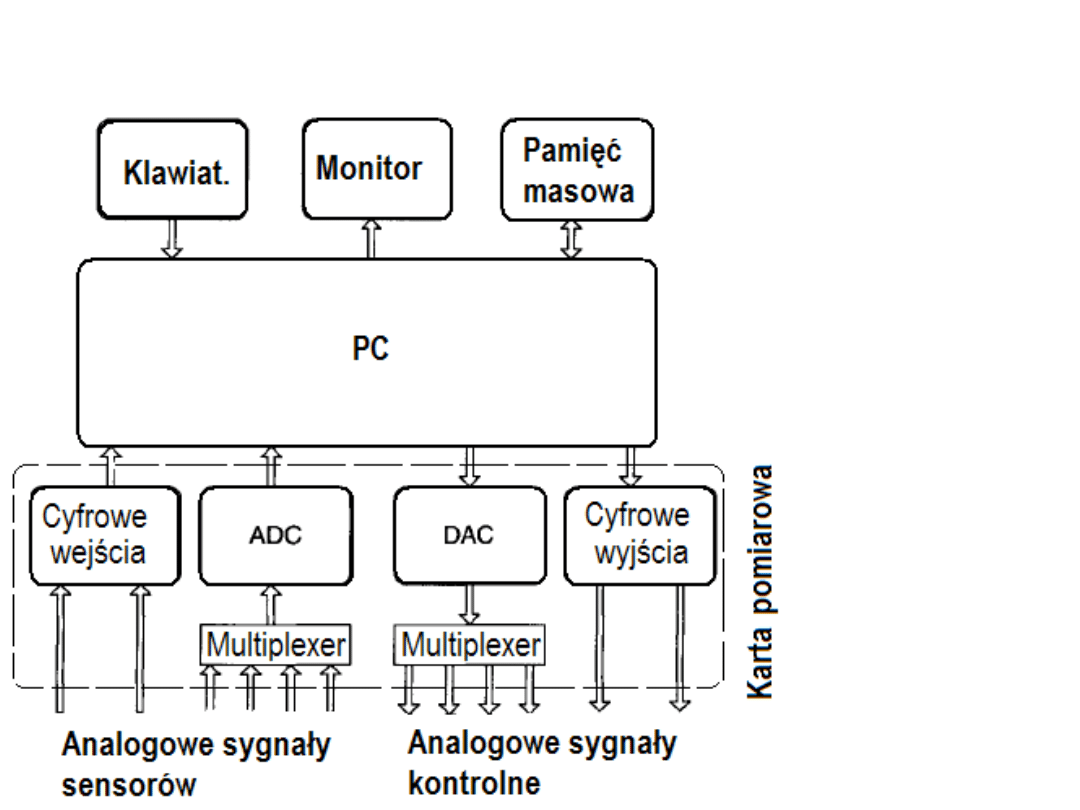
Uproszczony schemat komputera z kartą pomiarową
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
- Slajd 39
- Slajd 40
- Slajd 41
- Slajd 42
- Slajd 43
- Slajd 44
- Slajd 45
- Slajd 46
- Slajd 47
- Slajd 48
- Slajd 49
- Slajd 50
- Slajd 51
- Slajd 52
- Slajd 53
- Slajd 54
- Slajd 55
- Slajd 56
- Slajd 57
- Slajd 58
- Slajd 59
- Slajd 60
- Slajd 61
- Slajd 62
- Slajd 63
- Slajd 64
- Slajd 65
- Slajd 66
Wyszukiwarka
Podobne podstrony:
Materiały elektroniczne 14
ELEKTROTERAPIA 14.05 I elementy fizykalne, fizykoterapia
Die Geschichte der Elektronik (14)
Elektra 2 14 png
Elektra 2 14 wmf
fizyka elektryczność 14 24
bhp przy urządzwniach i instalacjach elektrycznych projekt 15 02 12
wyklad 14 15 2010
IS wyklad 14 15 01 09 MDW id 22 Nieznany
PROGRAM laboratoriów z Ekologii i ochrony przyrody na semestr zimowy 14 15
Kolokwium 14 15 baza pytań (1)
16 424 plan ii rok 14 15 zimowy, 16 09
14 15 87
Karta oceny projektu nr 2 14 15
giełda zaliczenie końcowe medyna paliatywna gr 5 rok 14 15
Sylabus z zajec 14 15 luty
14 15
więcej podobnych podstron