Electrostatic Piggyback Microactuators for Head Element Positioning
Makoto Mita
*1
, Hiroshi Toshiyoshi
*1*2
, Hiroyuki Fujita
*1
*1
Institute of Industrial Science (IIS), University of Tokyo
4-6-1 Komaba, Meguro-ku, Tokyo 153-8505, Japan
*2
VLSI Design and Education Center (VDEC), University of Tokyo
Abstract --- We propose a new types of the 3
rd
generation
MEMS piggyback actuator mechanism, which is suitable
for integration with read/write head device. An SOI
wafer is patterned into a multiple-plate electrostatic
actuator (2-um gap) by Deep RIE process. Prototype
actuators (2 mm x 3 mm x 0.6 mm) without head device
have
been
developed
to
test
electromechancial
characteristics. Typical mechanical stroke of 0.5 microns
with a dc 60 V and resonant frequency of 16 kHz have
been obtained. Analytical model have predicted that
0.15-micron-displacement would be possible for 200
Gbit/in
2
model when the electrostatic gap is designed to be
0.5 microns.
Index Terms -- MEMS, microactuator, electrostatic, hard-
disk drive, piggyback actuator, SOI.
I. Introduction
As the recording density of hard-disk driv es (HDD) is
increasing over 100 Gbit/in
2
, the conventional voice-
coil motor (VCM) mechanisms are facing difficulty in
positioning the slider chip at fast response (20 kHz in
terms of resonance) and high accuracy (< 0.5 microns
or 150 kTPI). Sev eral different types of MEMS
(Micro
Electro
Mechanical
Systems)
piggyback
mechanism, in which a small actuator moves in
cooperation with a VCM to move a slider, have been
developed to overcome these problems [1].
The first generation MEMS piggyback approaches use
an electromagnetic or PZT actuators in the middle of
the suspension, while the second generation has an
actuator in between the slider and the gimbal. These
two approaches can be immediately applied to the
present manufacturing of HDD, because no alternation
is needed in the read/write-head processes. However,
added cost for head-gimbal assembly (HGA) cannot be
negligible.
In the third generation approach, on the other hand, the
actuator can be fully integrated by batch processes with
the read/write devices and the air-bearing slider. In a
past few years, several types have been reported [11-14].
However, no practical method of integrating actuators
with head devices has been proposed.
This paper proposes a simple fabrication method for
integrating the MEMS microactuator with head element
devices. Prototype actuators have been developed
without
the
head
element
parts
for
testing
electromechanical performance.
II. Silicon Microactuator for HDD Positioning
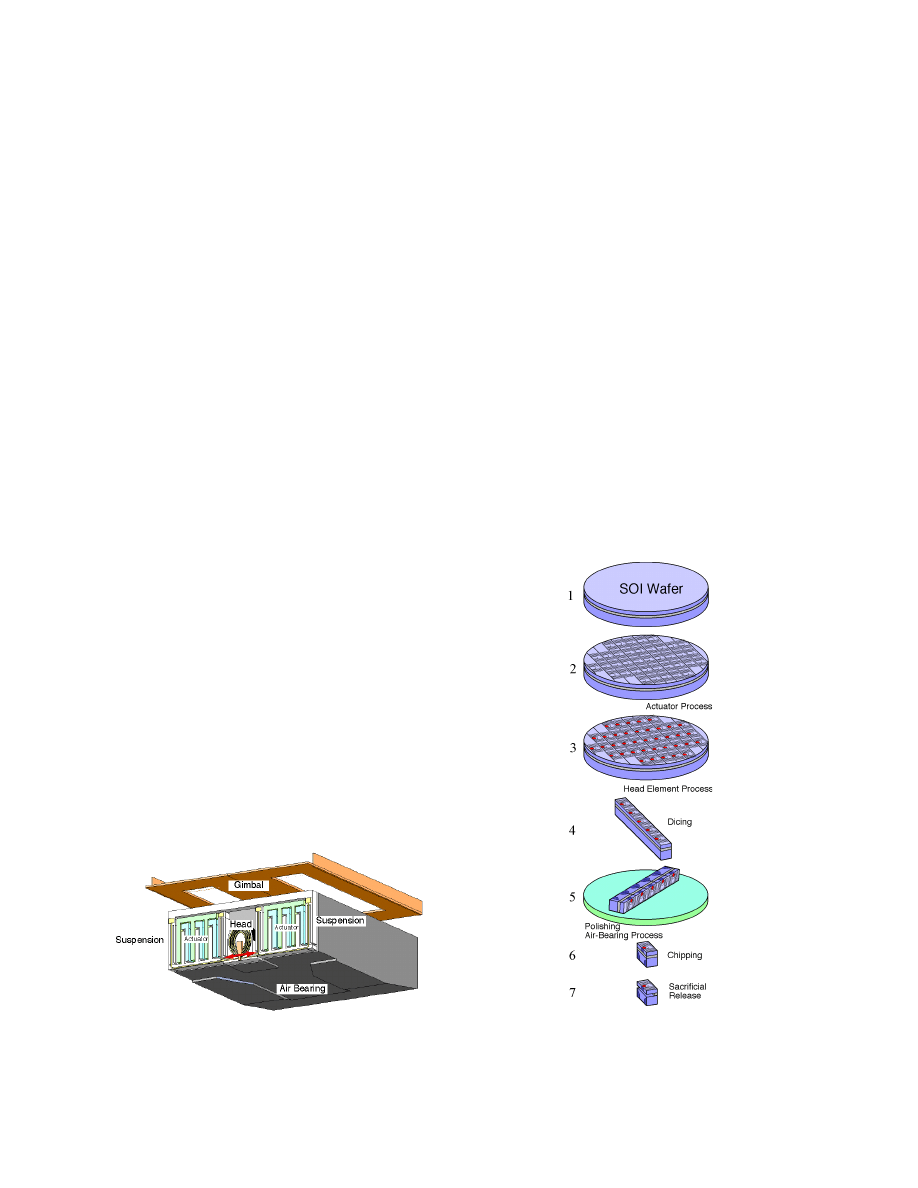
Figure 1 illustrates a schematic picture of our piggyback
actuator. The actuator and the head element are
Fig. 1: Schematic view of monolithically integrated
MEMS piggyback actuator.
Fig. 2: Processes for monolithically integrating MEMS
piggyback actuator with head element devices.
implemented on the active layer of an SOI wafer, with
its substrate part used as a air-bearing slider. The head
is laterally driven by the actuator in the directions
shown in the figure.
Proposed fabrication process for fully integrating the
actuator with head element device is shown in Fig. 2.
(1) Microactuators are formed into an SOI wafer by
using the silicon DRIE technique, and deep trenches are
to be filled for planarization. (2) Magnetic heads are
produced on the wafer (which has not been tested in our
process yet). (3) A bar of devices is cut out by dicing.
The sidewall of the bar is polished to expose the
read/write heads, followed by patterning of the air-
bearings. Conventional head processes can be used for
these steps. (4) Sacrificial etching step to release the
mechanically movable parts. Subsequently, each device
is chipped off to be ready for the final head-gimbal
assembly. The process here is very simple and
straightforward
compared
with
those
previously
reported. It does not require wafer bonding or device-
level assembly of different materials.
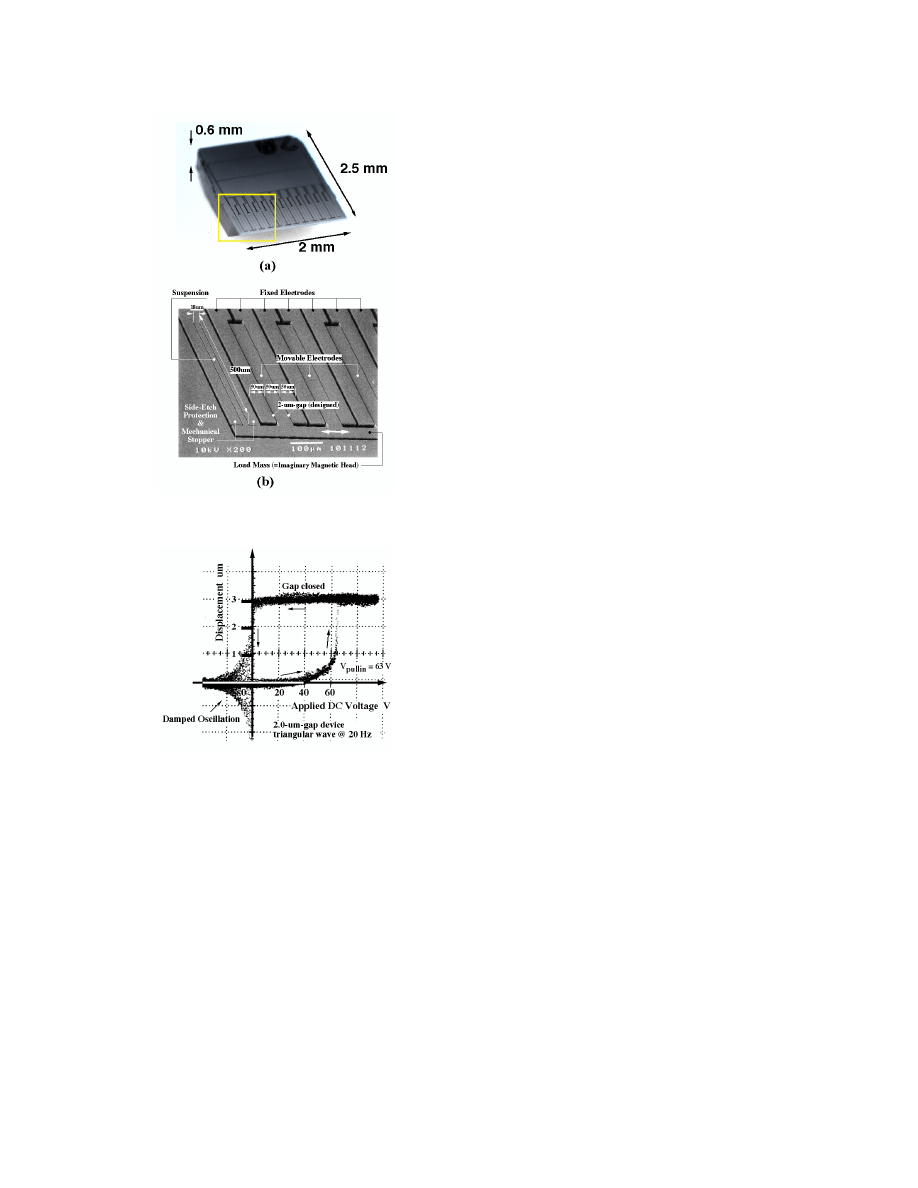
III. Prototype Results
Figure 3 (a) shows a piggyback actuator chip which is 2
mm in width, 2.5 mm in length, and 0.6 mm in height.
A close-up view of the electrodes is shown in Fig. 3 (b).
Each movable electrode has identical dimensions of 50
microns in width, 500 microns long, and 50 microns in
height.
The electromechanical performance of the actuator has
been tested by the laser Doppler velocimetry. Figure 4
shows the dc transfer curve of the actuator under a
triangular wav e v oltage of 20 Hz. Pull-in has been
observed at 63 V. Target stroke 0.5-um is possible at a
dc voltage of 60 V. Fundamental resonance has been
found at 16 kHz.
IV. Conclusions
HDD read/write heads today are made on AlTiC
substrates, which are very hard material to make
microactuators by any etching methods. Using a
silicon wafer has compatibility with micromachining as
well as read/write head processes. In this paper, we
have proposed an electrostatic microactuator compatible
with monolithically integration with head element on an
SOI wafer. This approach is good for practical use
because (1) high-resolution patterning of actuator and
head element can be done on the initial surface of wafer,
and that (2) fine polishing for head element and air
bearing is possible.
Acknowledgement
This work has been supported in part by the 2001
contract with Japan Storage Research Consortium.
References
[1] Y. Uematsu, S. Koganezawa, T. Imamura, Y. Soeno, S.
Nakamura, K. Suzuki, M. Ataka, H. Fujita, “Piggyback
Microactuators for Ultra-high Track Density Hard Disk
Drives”, a chapter contributed to H. Baltes, W. Gopel, J.
Hesse: “Sensors update” Vol. 6, Wiley-VCH 1999, ISBN 3-
527-29820-7, pp. 333-358.
[2] T. Imamura, T. Koshikawa, M. Katayama, “Transverse
Mode Electrostatic Microactuator for MEMS-Based HDD
Slider,” Proc. IEEE The 9
th
Annual Int. Workshop on Micro
Electro Mechanical Systems (MEMS 96), Jan. 11-15, 1996,
San Diego, USA, pp. 216-221.
[3] S. Nakamura, K. Suzuki, M. Ataka, H. Fujita, “An
Electgrostatic Micro Actuator for a Magnetic Head Tracking
System of Hard Disk Drives,” Proc. Int. Conf. on Solid-State
Sensors and Actuators (TRANSDUCERS 97), Chicago, USA,
June 16-19, 1997, pp. 1081-1084.
[4] B.-H. Kim, K. Chun, “Fabrication of an electrostatic track-
following micro actuator for hard disk drives using SOI
wafer,” J. Micromech. Microeng., vol. 11, No. 1 (Jan., 2001),
pp. 1
Fig. 3: (a) Chip photograph and (b) close-up view of the
electrostatic actuator part.
Fig. 4: DC transfer curve of electrostatic actuator
Wyszukiwarka
Podobne podstrony:
Ustawa z 30 10 2002 r o ubezp społ z tyt wyp przy pracy i chor zawod
ecdl 2002
ei 03 2002 s 62
2002 09 42
2002 06 15 prawdopodobie stwo i statystykaid 21643
2002 06 21
2002 4 JUL Topics in feline surgery
Access 2002 Projektowanie baz danych Ksiega eksperta ac22ke
2002 08 05
Dyrektywa nr 2002 7 WE z 18 02 2002
2002 10 12 pra
ei 07 2002 s 32 34
poprawkowe, MAD ep 13 02 2002 v2
2002 03 26
ei 03 2002 s 27
2002 04 41
DYREKTYWA 200291WE PARLAMENTU EUROPEJSKIEGO I RADY z dnia 16 grudnia 2002 r w sprawie charaktery
więcej podobnych podstron