Pomiary sytuacyjno-wysokościowe
Pomiar sytuacyjno-wysokościowy x, y, H punktów szczegółów terenowych jest realizowany za pomocą
tachimetru (rozdz. 6.1, 6.4) lub odbiornika satelitarnego GPS. Wcięcia sytuacyjne punktów x, y są również
wykonywane za pomocą teodolitu, dalmierza lub taśmy. System kodowania i edycji atrybutów szczegółów
terenowych umożliwia automatyczne tworzenie numerycznych map, modeli terenu oraz przekrojów tras i rzek w
czasie pomiaru za pomocą tachimetru lub odbiornika GPS. Programy pomiarowe tachimetru i odbiornika GPS są
wyposażone w funkcje obliczania pól, objętości i długości linii mierzonych obiektów, tyczenia punktów
budowli, skarp, tras, DTM, warstwic i linii podziałowych katastru jak również sterowania
pracą koparek podczas
prac ziemnych na budowach.
1. Tachimetry
1.1 Pomiar sytuacyjno-wysokościowy
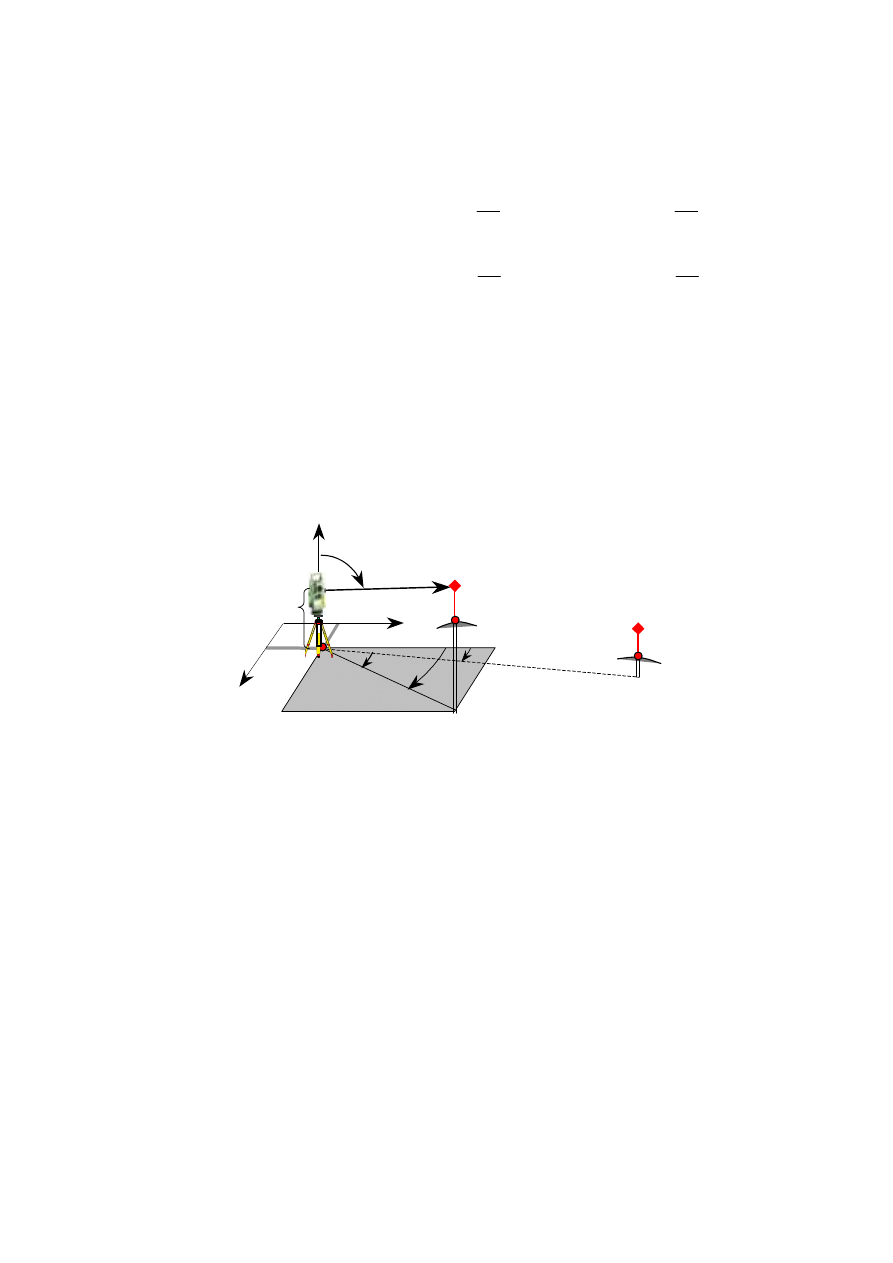
Tachimetr jest przeznaczony do wyznaczania położeń punktów na podstawie pomiaru kąta
poziomego
α, pionowego β i odległości s do stałego lub ruchomego pryzmatu (rys. 1.1).
Rys..1.1
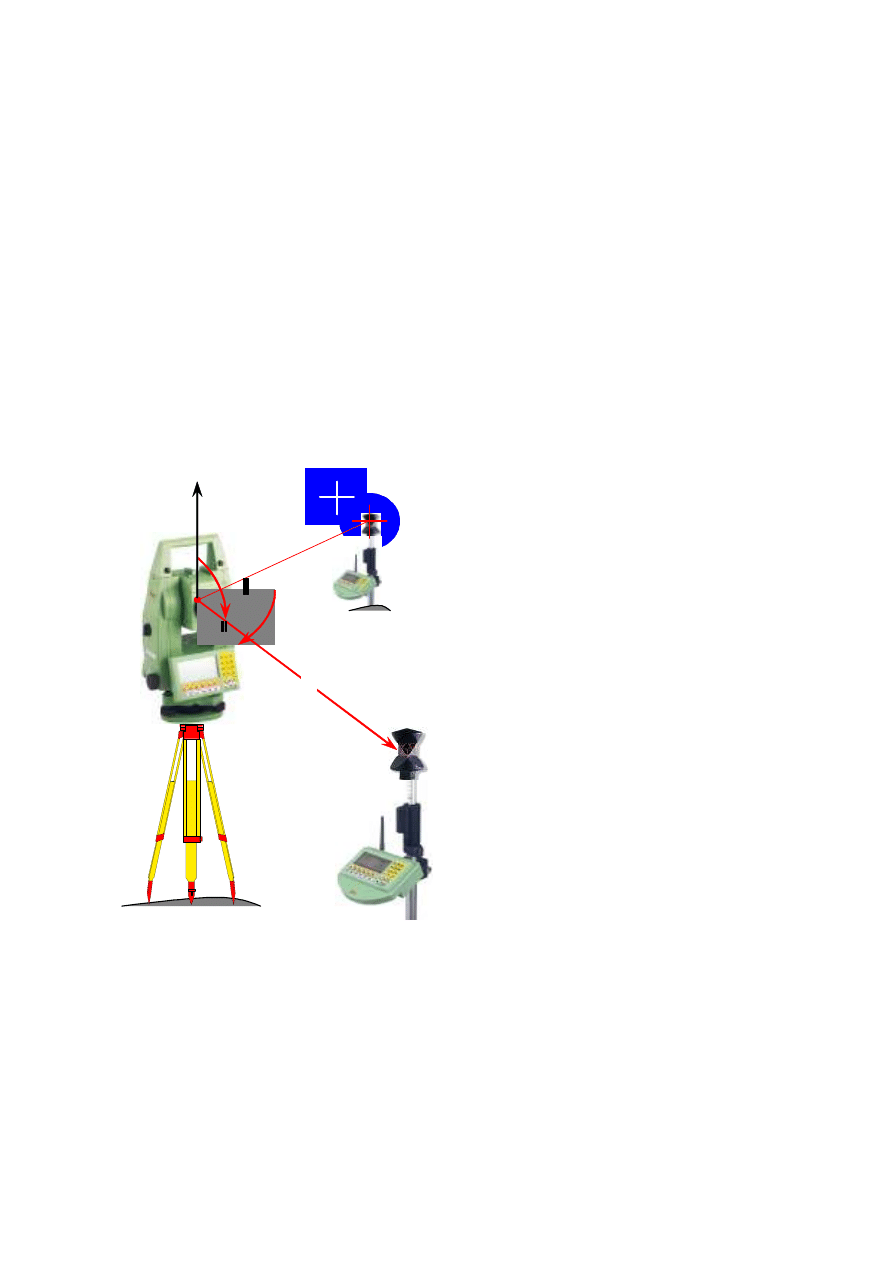
Wyposażenie tachimetru:
a) sensor - do automatycznego
naprowadzenia lunety na stały
lub ruchomy pryzmat.
b) komputer z systemem DOS,
kartą pamięci PCMCIA,
ekranem graficznym i klawiaturą.
c) pryzmat i moduł radiowy
z ekranem graficznym
i klawiaturą do sterowania pracą
β
α
s
tachimetru z poziomu pryzmatu
d) programy pomiarowe:
- pomiar sytuacyjno-wysokościowy
(.............)
- pomiar czołówek (..........)
- pomiar niedostępnej wysokości
(...............0)
- wcięcie stanowiska tachimetru
(................)
- tworzenie mapy numerycznej
(................)
- transformacja współrzędnych
(...............)
- obliczanie pól, objętości i długości
linii (................)
- tyczenie projektu budowlanego
(....................)
- sterowanie pracą koparek
Błędy średnie pomiaru odległości i kątów są określone w charakterystyce tachimetru:
Leica TPS 1100
błąd średni pomiaru kąta poziomego i pionowego
mα,β = 1,5"
błąd średni pomiaru odległości
ms = 2 mm + 2 ppm, ppm=10
-6
s
zakres pomiaru odległości 5 km
czas pomiaru 1s
graficzny wyświetlacz: 8 linii po 32 znaki
klawisze funkcyjne i alfanumeryczne
wejście / wyjście: PCMCIA 2-84 MB, RS 232
waga 4.7 kg.
Program pomiar sytuacyjno-wysokościowy jest przeznaczony do pomiaru współrzędnych
poziomych x, y i wysokości punktów H szczegółów terenowych takich jak budynki, granice
działek ewidencyjnych, drogi, mosty, rzeki, linie energetryczne itp.
Pomiar rozpoczyna się zwykle po ustawieniu tachimetru na punkcie osnowy geodezyjnej
o znanych współrzędnych i wysokości A (rys. 1.2). Po nawiązaniu kierunkowym na
najbliższe punkty osnowy (np. B na rys. 1.2) wykonuje się pomiar kierunków i odległości
do punktów szczegółów terenowych 1, 2, 3, 4 oraz do wybranego punktu dla następnego
stanowiska tachimetru, utrwalonego palikiem lub bolcem metalowym P. Dla kontroli kierunki
i odległości - szczególnie do punktów osnowy oraz punktów będących stanowiskami
tachimetru, są mierzone dwukrotnie.
Rys. 1.2
Współrzędne poziome i wysokości mierzonych punktów, np. P, są obliczane na podstawie:
• odległości przestrzennej
s
100.5
:=
m
s
0.005
:=
• kąta pionowego
β
75
π
200
⋅
:=
m
β
0.0010
π
200
⋅
:=
• kąta poziomego
α
65
π
200
⋅
:=
m
α
0.0010
π
200
⋅
:=
• wysokości tachimetru
i
1.56
:=
m
i
0.005
:=
• wysokości pryzmatu
j
2.0
:=
m
j
0.005
:=
•
oraz wspólrzędnych i wysokości stanowiska A i punktu nawiązania B (rys. 1.2, 1.3):
układ 2000
X, Y,
kronsztad 86
H
z
s
j
β
α
A
y
P
B
A =A
0
+
α
∆x
∆y
∆z
x
i
A
0
x
A
y
A
- azymut kierunku nawiązania A-B [grad]
- odległość pozioma A-P
Dodając przyrosty współrzędnych
∆x, ∆y i przewyższenie trygonometryczne ∆z:
.........
do współrzędnych i wysokości stanowiska tachimetru A otrzymuje się współrzędne
i wysokość punktu P - odniesione do płaszczyzny poziomej i kierunku pionu na stanowisku
tachimetru A:
..............................
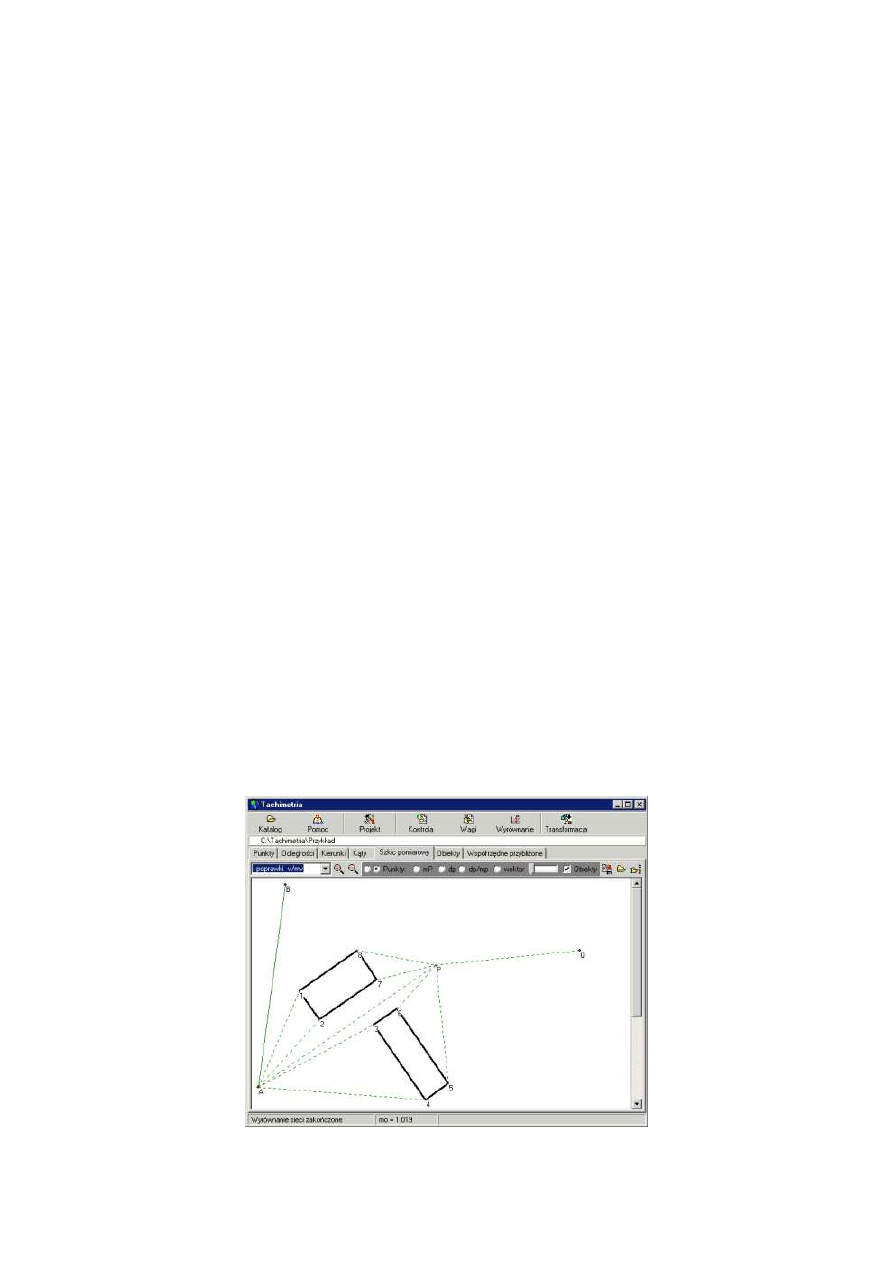
Po przeniesieniu tachimetru na stanowisko P i nawiązaniu kierunkowym na poprzednie
stanowisko A wykonywane są obserwacje kolejnych punktów mierzonych budynków 5, 6, 7,
8 oraz punktu następnego stanowiska tachimetru Q, utrwalonego palikiem lub bolcem. Dla
kontroli pomiary są wykonywane dwukrotnie. Ciąg tachimetryczny jest kontynuowany do
najbliższego punktu osnowy geodezyjnej - w rozpatrywanym przykładzie ciąg zawiera dwa
stanowiska pomiarowe szczegółów terenowych A i P, punkt Q jest punktem osnowy. Zwykle,
na punkcie osnowy (Q), w nawiązaniu kierunkowym do sąsiedniego punktu osnowy, jest
mierzony kierunek i odległość do poprzedniego stanowiska tachimetru (P).
W przypadku pomiaru za pomocą teodolitu wielkości s, j nie są mierzone, natomiast:
celowanie następuje bezpośrednio na znak naziemny mierzonego punktu, sygnalizowanego
tyczką mierniczą (j = 0),
obliczenie kątów poziomego
α i pionowego β jest prowadzone w dziennikach pomiaru kątów
(tabele 1.1 i 1.2),
odległość pozioma d jest mierzona dalmierzem nakładanym na lunetę teodolitu (celowanie
następuje na reflektor dalmierza) lub dalmierzem podręcznym np. DISTO, w ostateczności
taśmą mierniczą.
Tabela 1.1. Dziennik pomiaru kątów poziomych
POŁOŻENIE LUNETY
I
II
Kąt z I / II
położenia
Kąt poziomy
Stano
wisko
Cel
g c cc
Średnia
g c cc
Średnia
g c cc g c cc
B
115
40
41
50
50
41
00 315
42
43
00
00
42
50
A
P
145
87
87
50
00
87
25 345
87
88
50
00
87
75
30
46
45
25
25
30
45
75
Kierunki poziome pomierzone są w dwóch położeniach
lunety, wykonując po dwa naprowadzenia lunety na cel.
Tabela 1.2. Dziennik pomiaru kątów pionowych
POŁOŻENIE LUNETY
I - KL
II - KP
Błąd indeksu
2
400
−
+ KP
KL
Kąt pionowy
Stano
wisko
Cel
g c cc
Średnia
g c cc
Średnia
c cc
g c cc
A
P
101
40
40
00
00
40
00 298
58
58
00
00
58
00
-01
00
102
10
63
Kąty pionowe mierzone są w dwóch położeniach lunety:
I - koło pionowe teodolitu znajduje się po lewej stronie lunety
(KL), II - koło pionowe po prawej stronie lunety (KP);
wykonując po dwa naprowadzenia lunety na cel.
1.2. Poprawki wysokości
Dokładną wartość wysokości niwelacyjnej otrzymuje się dodając poprawki ze względu na
(rys. 1.4):
krzywiznę Ziemi - w przybliżeniu kuli o promieniu równym średniemu promieniowi elipsoidy
R
6383287
:=
- na szerokości 52
° (rys. 1.5):
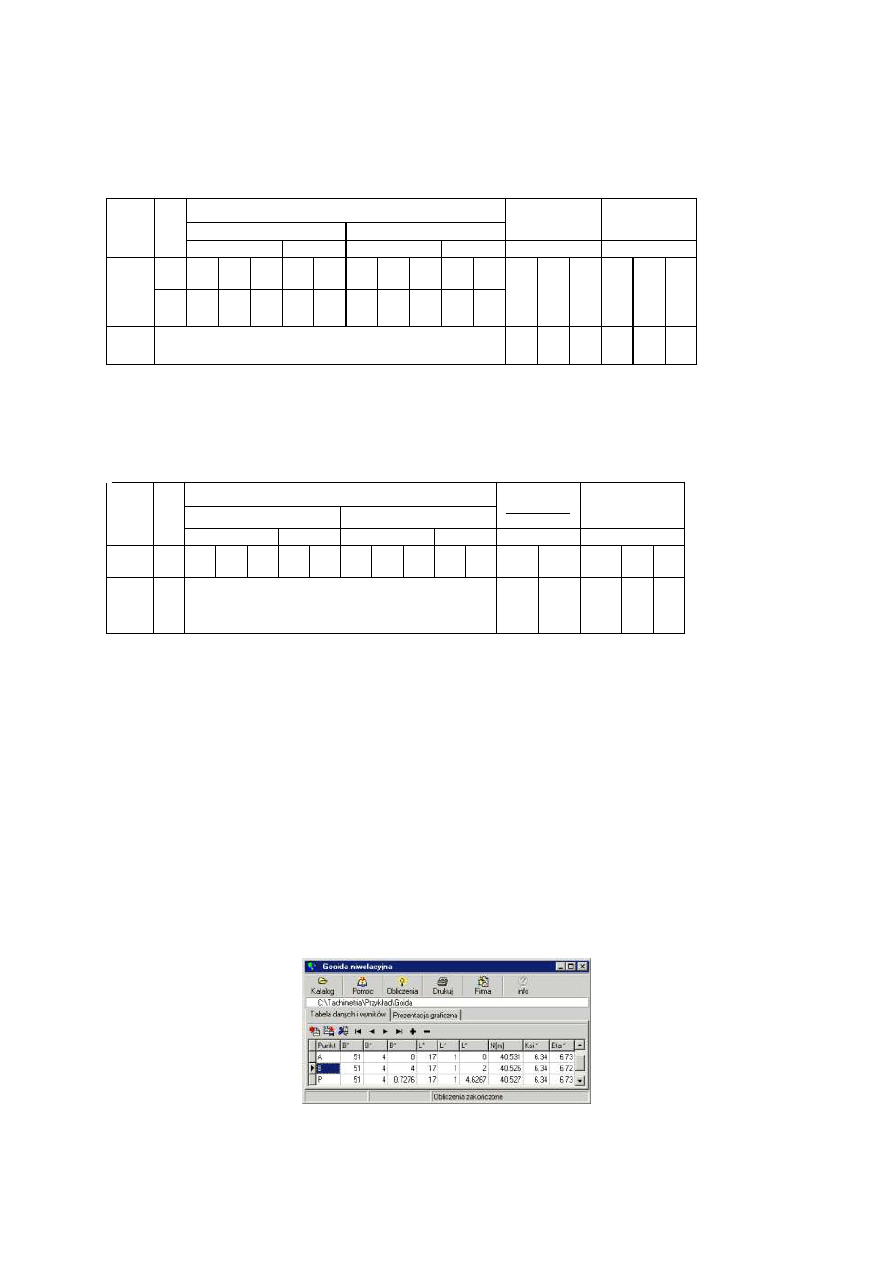
nierównoległość geoidy i elipsoidy
∆N = NP - NA gdzie wysokości geoidy są obliczone przy
pomocy programu geoida niwelacyjna (rozdz. 2.5) na podstawie współrzędnych
geodezyjnych B, L (rys. 1.6) otrzymanych w wyniku przekształcenia x
2000
y
2000
→
→
→
→
B L
(..............):
odchylenie pionu - w azymucie mierzonego kierunku (...........):
Rys. 1.6
d
P
d - ∆d
H
A
N
A
R
∆z
A
δR
∆d δH
v
H
P
=H
A
+∆H
=H
A
+∆z+δR-∆N+δH
N
P
=N
A
+∆N
z
g
- prostopadła do elipsoidy
z
- oś obrotu tachimetru
v
A
- odchylenie pionu
w kierunku A-P
v
Geoida
Teren
Elipsoida
Rys. 1.4
0
250
500
750
1000
0.08
0.06
0.04
0.02
d [m]
P
o
p
raw
ka
[m
]
Elipsoida
Rys. .1.5
1.3. Poprawki współrzędnych
Dokładne wartości współrzędnych otrzymuje się obliczając przyrosty ∆x, ∆y na podstawie
zredukowanych odległości d i kąta α na płaszczyznę układu 2000:
redukcja odległości na elipsoidę (rys. 1.4):
d
h
d
H
P
N
P
+
R
⋅
:=
redukcja odległości z elipsoidy na płaszczyznę układu 2000 w strefie
c
6
:=
(.................):
redukcja kąta na elipsoidę
- redukcja kąta ze względu na odchylenie pionu v (. Redukcja kąta ze względu na wzniesienie celu jest zaniedbywalna na
terenach nizinnych -.
redukcja kąta z elipsoidy na płaszczyznę układu 2000 (..............):
Zatem, na podstawie zredukowanych odległości d i kąta α na płaszczyznę układu 2000:
są obliczane przyrosty
oraz współrzędne mierzonego punktu P:
1.4. Błąd położenia punktu
Charakterystykami dokładności położenia pomierzonego punktu są:
• błąd wysokości H
m
H
cos
β
( )
2
m
s
2
⋅
s
2
sin
β
( )
2
⋅
m
β
2
⋅
+
m
i
2
+
m
j
2
+
:=
• błąd odległości poziomej d
m
d
sin
β
( )
2
m
s
2
⋅
s
2
cos
β
( )
2
⋅
m
β
2
⋅
+
:=
• błędy współrzędnych x, y:
m
x
cos A
( )
2
m
d
2
⋅
d
2
sin A
( )
2
⋅
m
α
2
⋅
+
10
3
⋅
:=
m
y
sin A
( )
2
m
d
2
⋅
d
2
cos A
( )
2
⋅
m
α
2
⋅
+
10
3
⋅
:=
m
xy
sin A
( ) cos A
( )
⋅
m
d
2
d
2
m
α
2
⋅
−
(
)
⋅
10
6
⋅
:=
• błąd położenia punktu m
P
, rys. 1.7:
m
P
m
x
2
m
y
2
+
:=
• błąd położenia punktu w zadanym kierunku α - krzywa błędu położenia punktu
(...........), rys. 1.7:
m
α
( )
m
x
2
cos
α
( )
2
⋅
m
xy
sin 2
α
⋅
( )
⋅
+
m
y
2
sin
α
( )
2
⋅
+
:=
• elipsa błędu położenia punktu o półosiach A, B i ich azymutach α
A
, α
B
, rys. 1.7:
α
A
1
2
atan
2 m
xy
⋅
m
x
2
m
y
2
−
⋅
:=
α
A
α
A
100
π
200
⋅
+
:=
α
B
α
A
100
π
200
⋅
+
:=
• elipsy na zadanych poziomach ufności ( ), rys. 1.7:
A
0.997
A
qchisq 0.997 2
,
(
)
⋅
:=
B
0.997
B
qchisq 0.997 2
,
(
)
⋅
:=
A
0.95
A
qchisq 0.95 2
,
(
)
⋅
:=
B
0.95
B
qchisq 0.95 2
,
(
)
⋅
:=
15
10
5
0
5
10
15
10
5
5
10
krzywa m(alfa)
elipsa A, B 39%
mP
elipsa 95%
elipsa 99.7%
6.055
6.055
−
m α
( )
cos α
( )
⋅
cos α
( )
m
el
α
( )
m
P
cos α
( )
⋅
cos α
( )
m
0.95
α
( )
cos α
( )
m
0.997
α
( )
16
16
−
m α
( )
sin α
( )
⋅
sin α
( )
m
el
α
( )
,
m
P
sin α
( )
⋅
,
sin α
( )
m
0.95
α
( )
,
sin α
( )
m
0.997
α
( )
,
.
Rys. 6.1.7
Wyszukiwarka
Podobne podstrony:
Instrukcja Techniczna G 4 1983r – Pomiary sytuacyjne i wysokościowe
Pomiar sytuacyjny metodą domiarów prostokątnych, uczelnia, BL, Geodezja, zagadnienia z geodezji
1345 g 4 pomiary sytuacyjne i wysokosciowe
8-POMIARY SYTUACYJNE (poziome), POMIARY SYTUACYJNE (POZIOME)
druki, Dziennik pomiaru sytuacyjno – wysokościowego met. biegunową, Str
2 Jakie szczegóły terenowe objęte krajowym systemem informacji o terenie zaliczamy do I grupy dokła
3 Techniki pomiarów sytuacyjno wysokościowych i opracowania rzeźby terenu
Dziennik pomiaru sytuacyjno – wysokościowego met
Pomiar sytuacyjny metodą biegunową
Pomiary sytuacyjno
11 Powierzchnie odniesienia pomiarów sytuacyjnych
G 4 Pomiary sytuacyjne i wysokościowe
instrukcja G-4 pomiary sytuacyjne i wysokościowe, wytyczne techniczne
pomiary sytuacyjne
Instrukcja Techniczna G 4 [1983r ] [Pomiary sytuacyjn
INSTRUKCJA TECHNICZNA G 4 (1983 Pomiary sytuacyjne i wysokościowe)
więcej podobnych podstron