17
W tym ćwiczeniu zapoznamy się z pojęciem zespołów elastycznych w Autodesk Inventor
2009 oraz z tworzeniem reprezentacji pozycyjnych na bazie wiązań zespołów.
Elastyczność stosujemy dla zespołów mechanicznych, które podczas pracy mogą przyjmować
różne pozycje i włączamy ją, aby jeden podzespół mógł występować w zespołach nadrzędnych
w różnych pozycjach kinematycznych w stosunku do konfiguracji pierwotnej, w jakiej go zapisano,
bez wpływu na inne wystąpienia w tym samym bądź w różnych zespołach. Opcja jest dostępna
w menu kontekstowym przeglądarki projektu dla podzespołów bieżącego zespołu. Jeśli wyłączymy
elastyczność – podzespół powróci do pozycji pierwotnej. Podzespół elastyczny rozpoznamy
w przeglądarce po ikonie
.
Należy pamiętać, że elastyczność pozwoli na ruch w pożądanym kierunku, jeśli podzespół posiada
odblokowane odpowiednie stopnie swobody.
1.
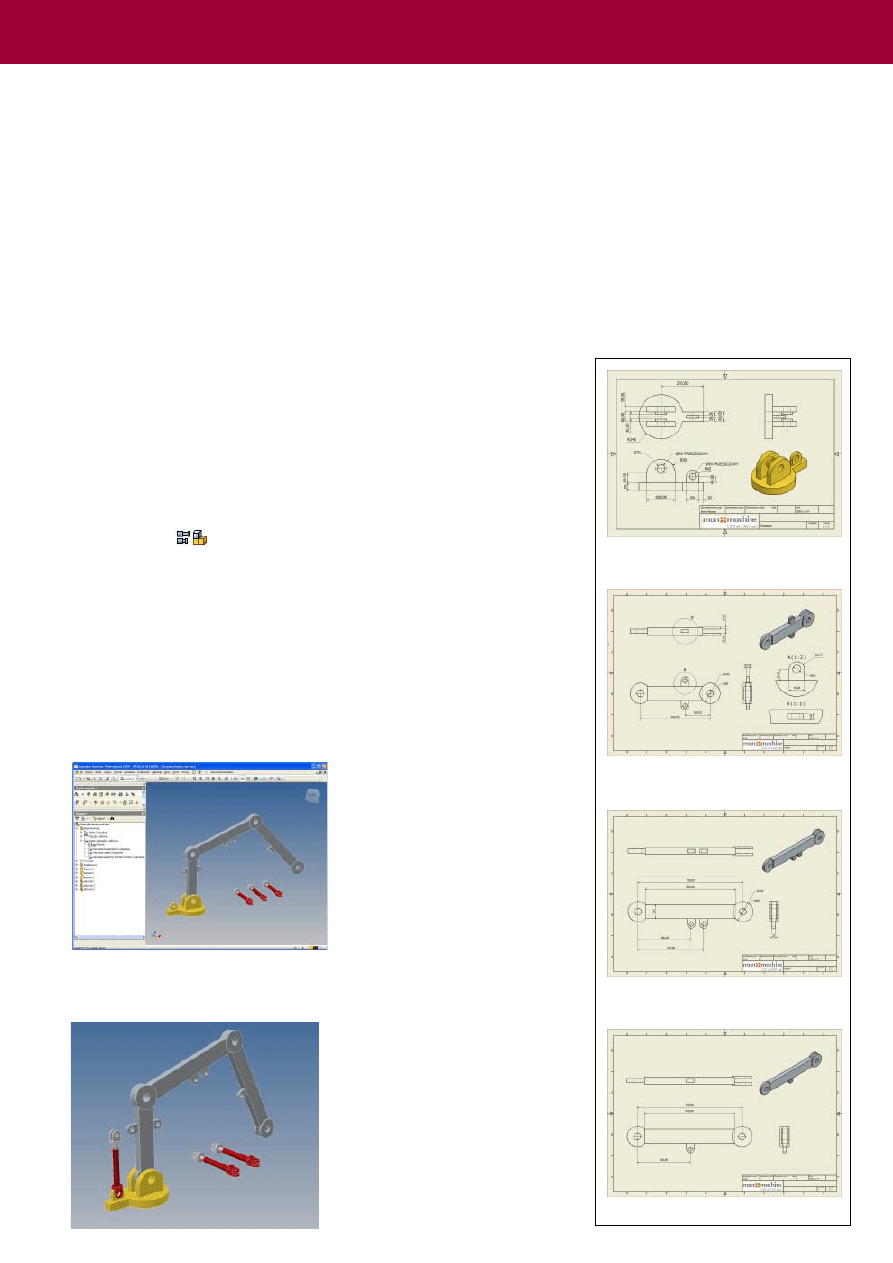
Pierwszy krok to przygotowanie rekwizytów, potrzebnych do naszego ćwiczenia. Użyjemy
przykładu robota o trzech ramionach, zamocowanego do podstawy obrotowej.
(Można także prześledzić kolejne kroki ćwiczenia na prostszych przykładach – wystarczy
do zespołu wstawić trzy wystąpienia podzespołu, w którym wiązania pozwalają na ruch
w interesujący nas sposób).
Otwieramy zespół główny z podstawą oraz trzema ramionami robota, przygotowany zgodnie
ze wskazówkami na rysunkach obok artykułu i ustawiamy ramiona mniej więcej w pozycji jak
na Rys. 8.
2.
Narzędziem Wstaw komponent wstawiamy do zespołu trzy podzespoły siłownika.
3.
Za pomocą wiązania typu Wstaw mocujemy obudowę pierwszego siłownika do uchwytu na
podstawie robota.
Zespoły elastyczne
i reprezentacje pozycyjne
w Autodesk Inventor 2009
Autodesk Inventor. Ćwiczenia. Zespoły elastyczne i reprezentacje pozycyjne w Autodesk Inventor 2009
Rys.1 Zespół 1 - Podstawa robota.
Rys. 2 Zespół 1 - Ramię 1.
Rys. 3 Zespół 1 - Ramię 2.
Rys. 4 Zespół 1 - Ramię 3.
18
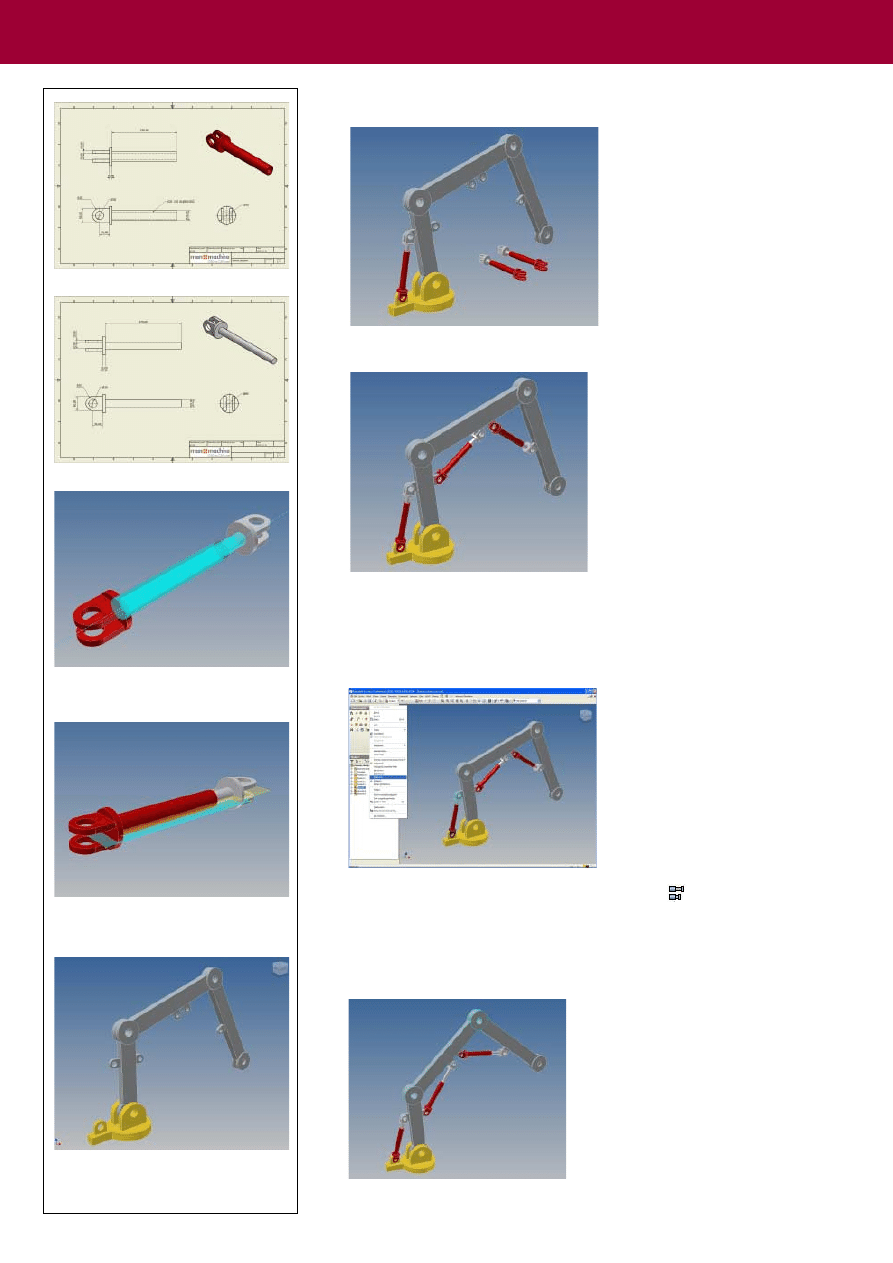
4.
Tłok siłownika wiążemy do pierwszego segmentu ramienia wiązaniem Zestawiające ( mm) dla
osi otworów tłoka i uchwytu na pierwszym ramieniu. Aktualizujemy zespół.
5.
W podobny sposób montujemy drugi oraz trzeci siłownik.
6.
Gdybyśmy chcieli teraz poruszyć ramieniem robota za pomocą myszy program nie
pozwoli na to, ponieważ siłowniki blokują robota w jednym położeniu – wiązania
podzespołów nie działają, kiedy jesteśmy w zespole nadrzędnym. Ruch umożliwi przełączenie
podzespołu w tryb Elastyczności.
Klikamy prawym klawiszem w przeglądarce projektów na pierwszym siłowniku i z menu
kontekstowego wybieramy opcję Elastyczny.
7.
W przeglądarce dla pierwszego siłownika pojawiła się ikonka
. Możemy już poruszać
ramieniem robota dzięki trybowi elastyczności pierwszego siłownika. Włączymy elastyczność
w ten sam sposób dla dwóch pozostałych siłowników. Przy próbach poruszania robotem należy
wykonywać delikatne ruchy myszą aby nie zmienić pozycji ramion w nienaturalny sposób.
Przy okazji zespołów elastycznych możemy nauczyć się tworzyć reprezentacje pozycyjne.
Służą one do oceny i szybkiego przywołania kolejnych stanów kinematycznych zespołów.
W naszym krótkim samouczku prześledzimy tylko jedną z metod tworzenia reprezentacji.
Autodesk Inventor. Ćwiczenia. Zespoły elastyczne i reprezentacje pozycyjne w Autodesk Inventor 2009
Rys. 6 Zespół 2 - Tłok siłownika.
Rys.7 Zespół 2 - gotowy siłownik
(siłownik.iam), pierwsze wiązanie
Zestawiające dla osi.
Rys.8 Zespół 2 - drugie wiązanie Zestawiające
dla płaszczyzn symetrii. Zapisujemy siłownik
w pozycji mniej więcej jak wyżej.
Rys. 5 Zespół 2 - Obudowa siłownika.
Rys. 8 Zespół 1 (zespoly elastyczne.iam)
z ramieniem robota, podstawą unieruchomioną,
ramionami połączonymi z podstawą i wzajemnie
ze sobą wiązaniami typu Wstaw.
19
8.
Otwieramy zespół siłownik.iam. Wprowadzimy w nim trzecie
wiązanie Zestawiające (
mm) między kołnierzami obudowy i tłoka.
W menu przeglądarki dla Reprezentacje>Pozycja wybieramy Nowy…
i definiujemy nową reprezentację pozycyjną, zmieniamy jej nazwę
na Minimum. Następnie prawym klawiszem klikamy na trzecim,
nowym wiązaniu i wywołujemy polecenie Nadpisz… .W oknie
dialogowym w zakładce Wiązanie włączamy Wyłączenie -
z wyborem na liście jako Włącz. Poniżej zaznaczamy Wartość
mm.
Klawiszem OK zamykamy okienko.
9.
Uaktywniamy reprezentację pozycyjną Główna. Zmieniamy wartość
dla trzeciego wiązania na 350 mm. Tworzymy nową reprezentację
pozycyjną, zmieniamy jej nazwę na Średnia i jak w poprzednim kroku
poprzez Nadpisz włączamy nadpisanie dla tej pozycji wiązania wraz
z wartością
mm.
10.
Ponownie uaktywniamy reprezentację pozycyjną Główna.
Zwiększamy rozsunięcie siłownika na
mm i w taki sam sposób
tworzymy trzecią reprezentację pozycyjną Maksimum. Wracamy
do reprezentacji pozycyjnej Główna siłownika, ustawiamy wartość
dla trzeciego wiązania jako
mm.
Jak pamiętamy, dla zespołów elastycznych podzespół musi posiadać
odpowiedni stopień swobody, pozwalający na ruch w pożądanym
kierunku. Wprowadzenie trzeciego
wiązania odebrało stopień swobody,
który był nam potrzebny w zespole
robota, dlatego wyłączymy
je w reprezentacji głównej. Z menu
kontekstowego dla wiązania
Zestawiający:3 wybieramy Wyłącz,
co nie będzie przeszkadzało
w poprawnym funkcjonowaniu
reprezentacji pozycyjnych.
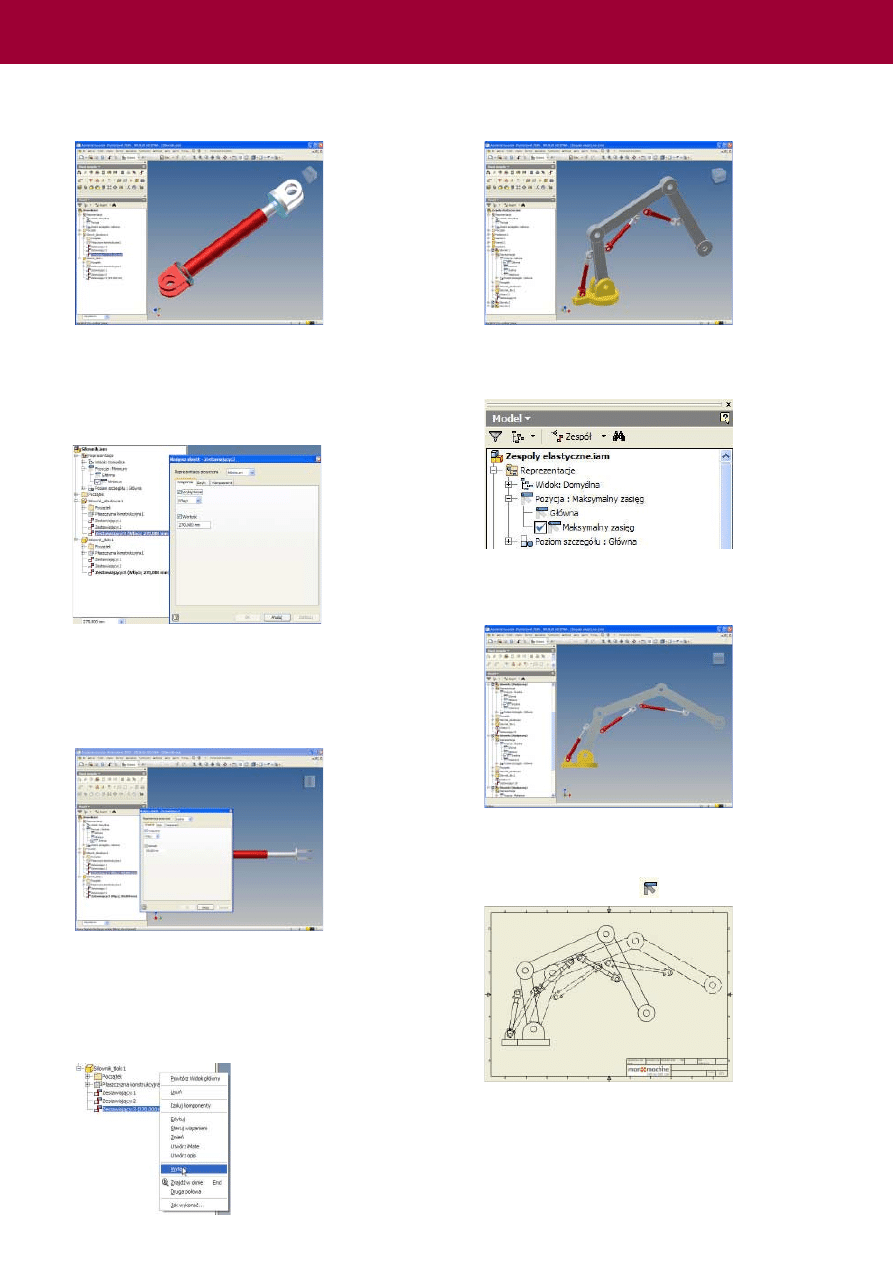
11.
Zapisujemy zmiany i zamykamy zespół Siłownika. Wracamy do
zespołu robota. Po uaktualnieniu zmian mamy sytuację jak poniżej.
12.
W menu przeglądarki zespołu głównego dla Reprezentacje>Pozycja
wybieramy Nowy… . Zmieniamy nazwę nowej reprezentacji
pozycyjnej na Maksymalny zasięg.
13.
Dla Siłownik: uaktywniamy reprezentację pozycyjną Średnia
poprzez dwukrotne kliknięcie na niej w przeglądarce, dla Siłownik:
także Średnia, dla Siłownik: – Maksimum.
14.
W podobny sposób możemy utworzyć inne reprezentacje pozycyjne
ramion robota. Reprezentacje pozycyjne możemy wyświetlić
w dokumentacji rysunkowej w postaci przerywanych linii za pomocą
narzędzia Widoki nakładkowe
.
IA MSD Anna Nowak
Man and Machine Software
Autodesk Inventor. Ćwiczenia. Zespoły elastyczne i reprezentacje pozycyjne w Autodesk Inventor 2009
Wyszukiwarka
Podobne podstrony:
Autodesk Inventor CAD
Autodesk Inventor Laboratorium 08
Autodesk Inventor Professional 2008 [34 strony]
Autodesk Inventor Laboratorium 07
Autodesk Inventor Laboratorium 05
Autodesk Inventor orverview PL
Autodesk Inventor Laboratorium 09
Autodesk Inventor 4 kurs podstawowy
Autodesk Inventor Laboratorium 03
Autodesk Inventor Series 2008 [2 strony]
Autodesk Inventor Laboratorium 02
Autodesk Inventor Tutorials Tips & Tricks
Autodesk Inventor Laboratorium 01
Autodesk Inventor Professional 10 Analiza naprężeń Pierwsze kroki
Autodesk Inventor Laboratorium 10
Autodesk Inventor Laboratorium 06
więcej podobnych podstron