Sposoby realizacji projektów mechatronicznych
.
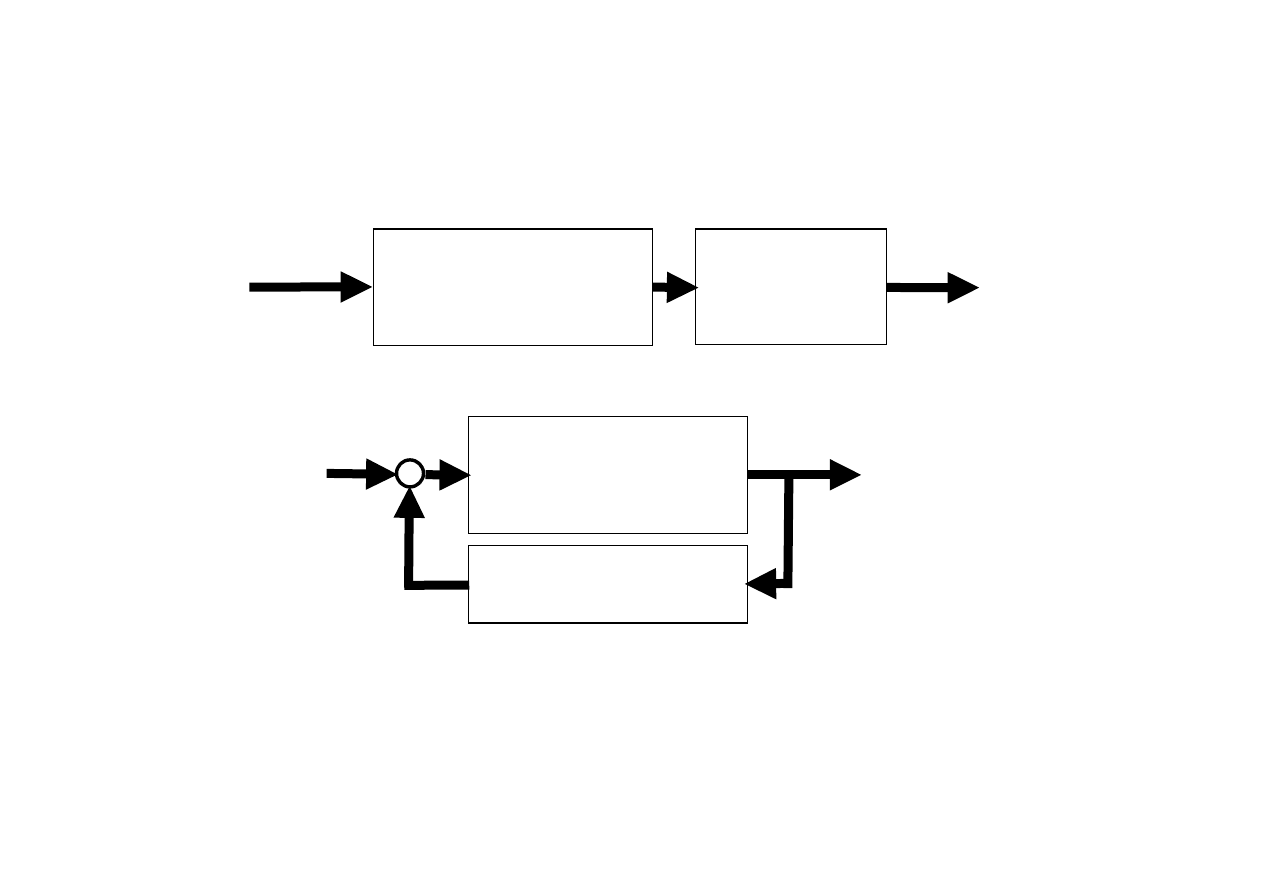
Układ otwarty
Układ zamknięty (ze sprzężeniem zwrotnym)
Funkcja celu: optymalizacja statyczna
F(X
1
, X
2
, ... , X
n
)=min
optymalizacja dynamiczna F(X
1
, X
2
, ... , X
n
,t)=min
X
i
, i=1,...,n – zmienne decyzyjne, t – czas
SYSTEM
MECHATRONICZNY
PROCES
ROBOCZY
SYSTEM
MECHATRONICZNY
PROCES ROBOCZY

Projekt mechatroniczny można realizować na bazie informacji:
–
o systemie mechatronicznym i procesie roboczym
dobra znajomość metod modelowania systemów mechatronicznych
–
tylko o systemie mechatronicznym
bardzo dobra znajomość metod modelowania i identyfikacji systemów
mechatronicznych
aparatura pomiarowa bardzo dobrej jakości
Zalecenia: niedostateczna wiedza o procesie roboczym
–
tylko o procesie roboczym
wiedza na temat procesu roboczego
aparatura pomiarowa bardzo dobrej jakości
Zalecenia:
brak informacji o systemie mechatronicznym
duża niepewność modelu obliczeniowego
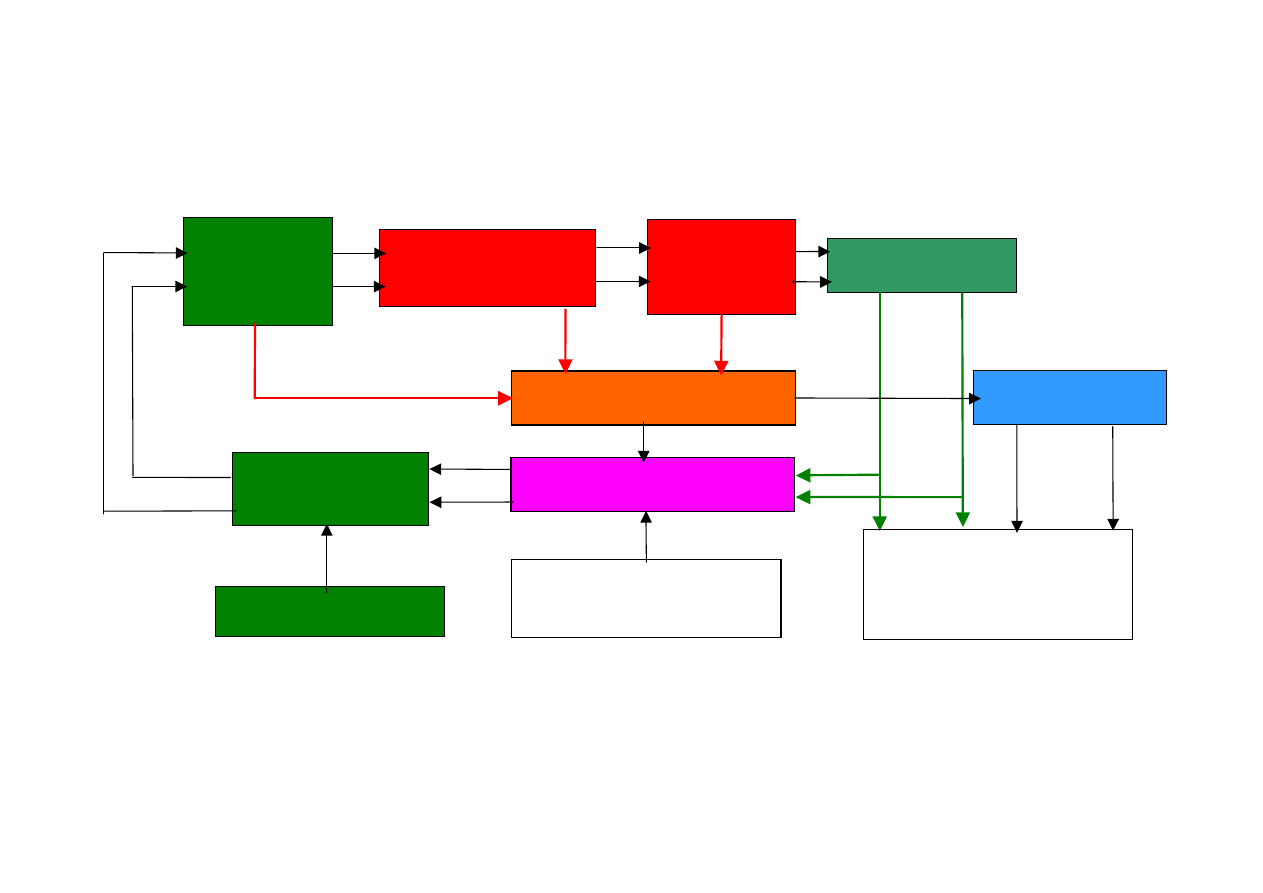
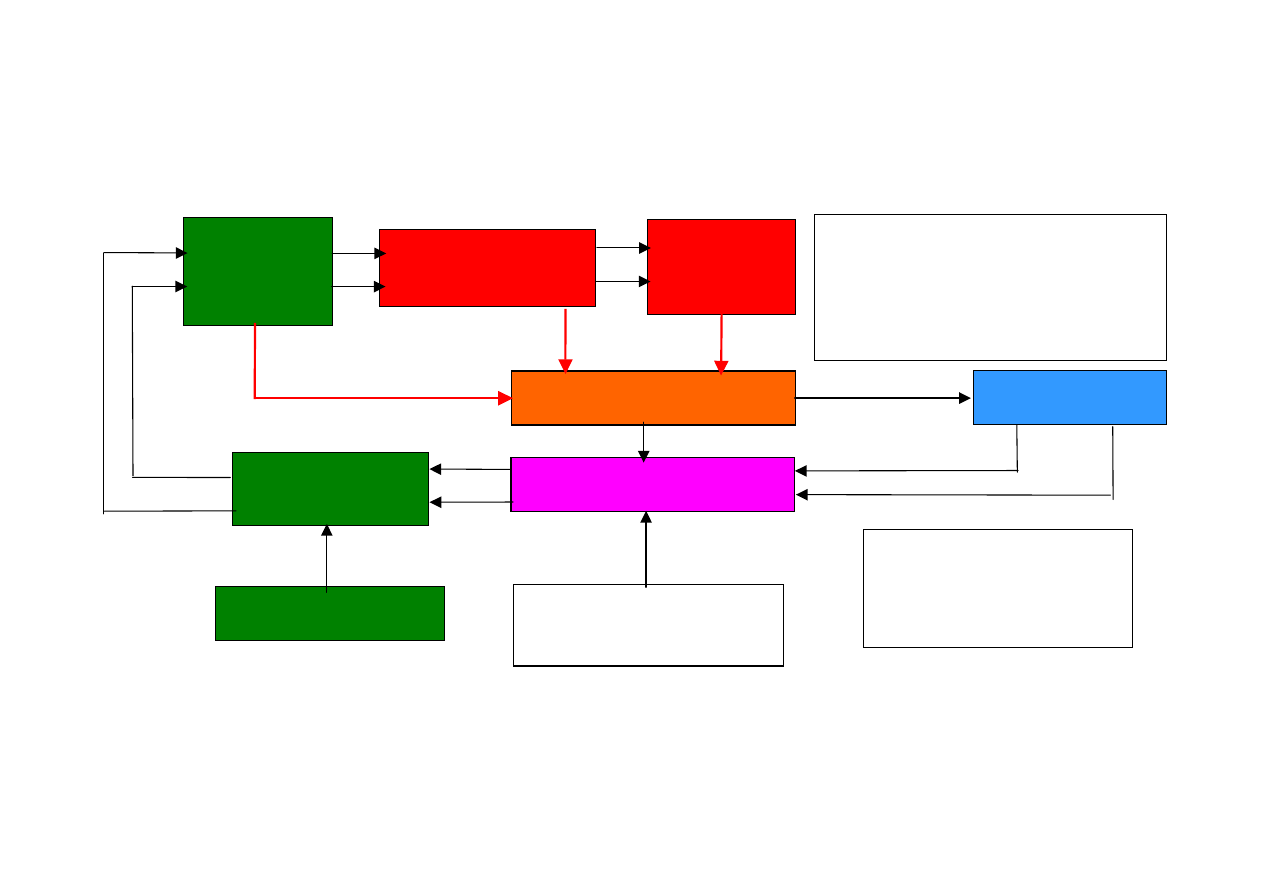
SCHEMAT FUNKCJONALNY UKŁADU MECHATRONICZNEGO
(2-KOŁOWA PLATFORMA MOBILNA)
Funkcja celu: minimalizacja błędu położenia punktu A w trakcie ruchu
płaskiego robota po zadanym torze
Informacja o
systemie mechatronicznym
i
procesie roboczym
KOŁA
ROBOTA
SILNIKI
PRĄDU
STAŁEGO
PRZEKŁADNIE
PLANETARNE
ENKODERY
MIKROSTEROWNIK
STEROWNIK
MOCY
AKUMULATOR
α
1
α
2
M
1
M
2
Równanie zadanego
toru robota f(x,y)
ZASILANIE
U
1
U
2
MODELOWANIE
SYMULACJA
Ocena zgodności
modelu
(walidacja)
α
1S
α
2S
SCHEMAT FUNKCJONALNY UKŁADU MECHATRONICZNEGO
(2-KOŁOWA PLATFORMA MOBILNA)
Tylko informacja o
systemie mechatronicznym
KOŁA
ROBOTA
SILNIKI
PRĄDU
STAŁEGO
PRZEKŁADNIE
PLANETARNE
MIKROSTEROWNIK
STEROWNIK
MOCY
AKUMULATOR
M
1
M
2
Równanie zadanego
toru robota f(x,y)
ZASILANIE
U
1
U
2
MODELOWANIE
SYMULACJA
Ocena zgodności
modelu
(walidacja)
α
1S
α
2S
Identyfikacja modelu
obliczeniowego:
– przed rozpoczęciem procesu
(off-line)
– w trakcie procesu (on-line)
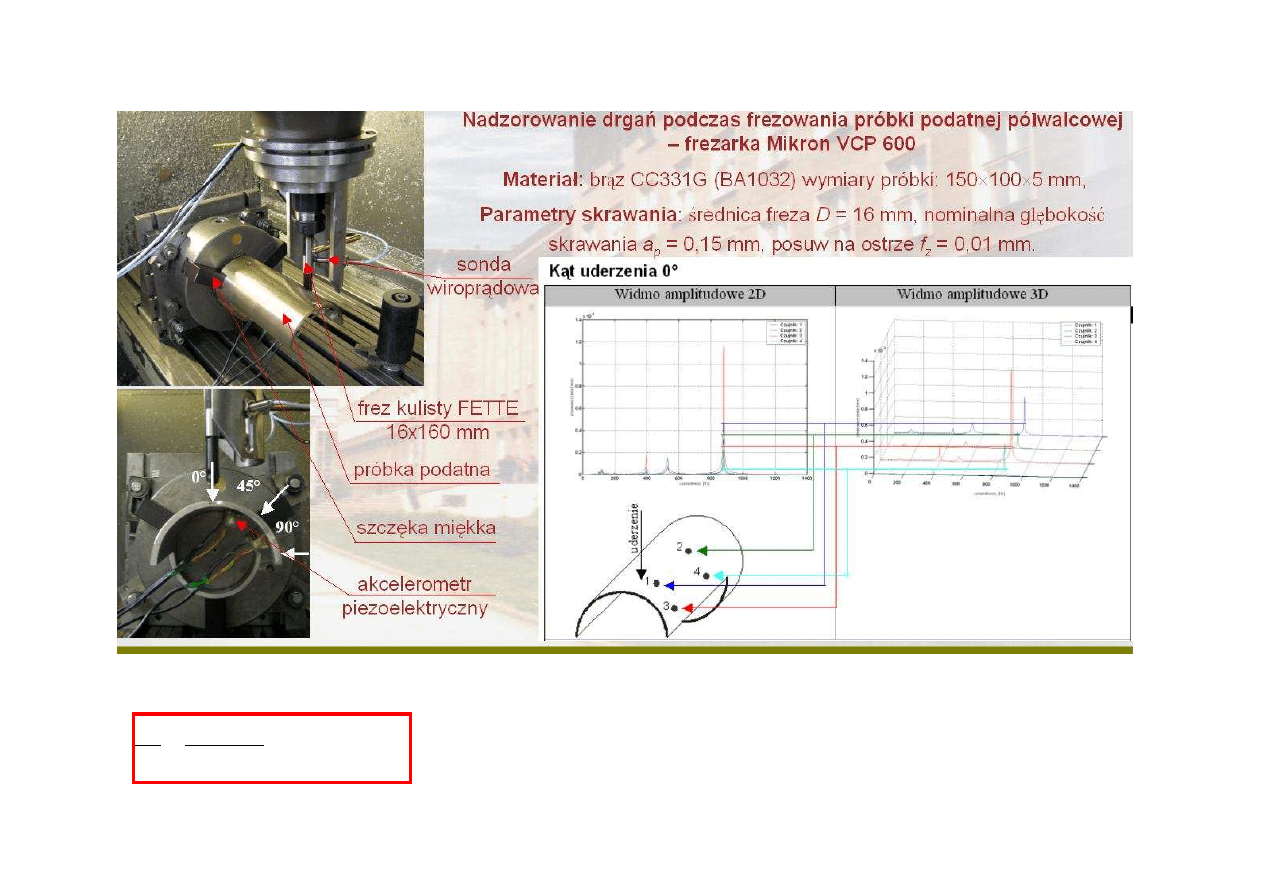
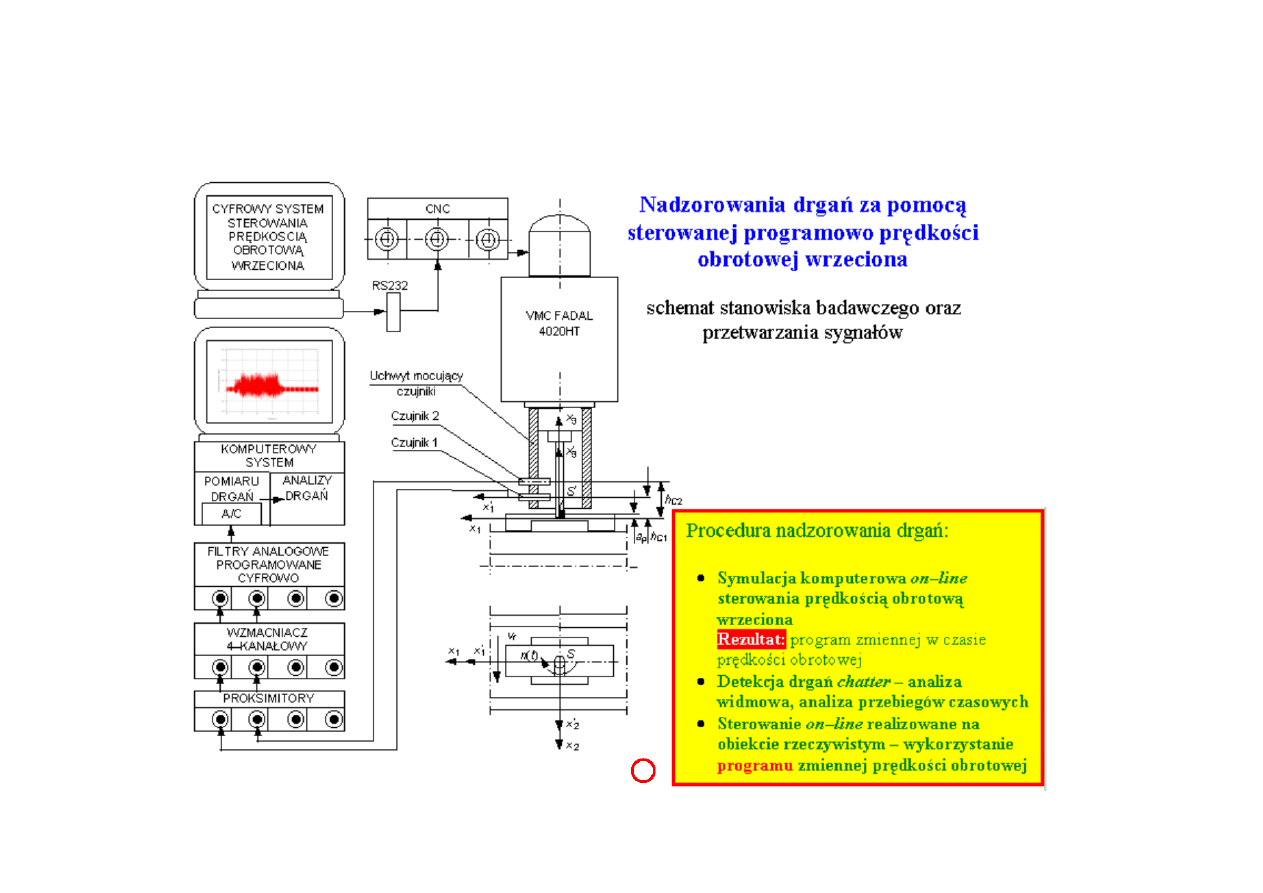
Optymalna prędkość obrotowa wrzeciona n z warunku
,...
2
,
1
,
0
,
25
,
0
60
=
+
=
k
k
f
zn
d
,
f
d
– częstotliwość dominującego rezonansu w widmie
z – liczba ostrzy freza
Tylko wiedza o systemie mechatronicznym (tryb off-line)
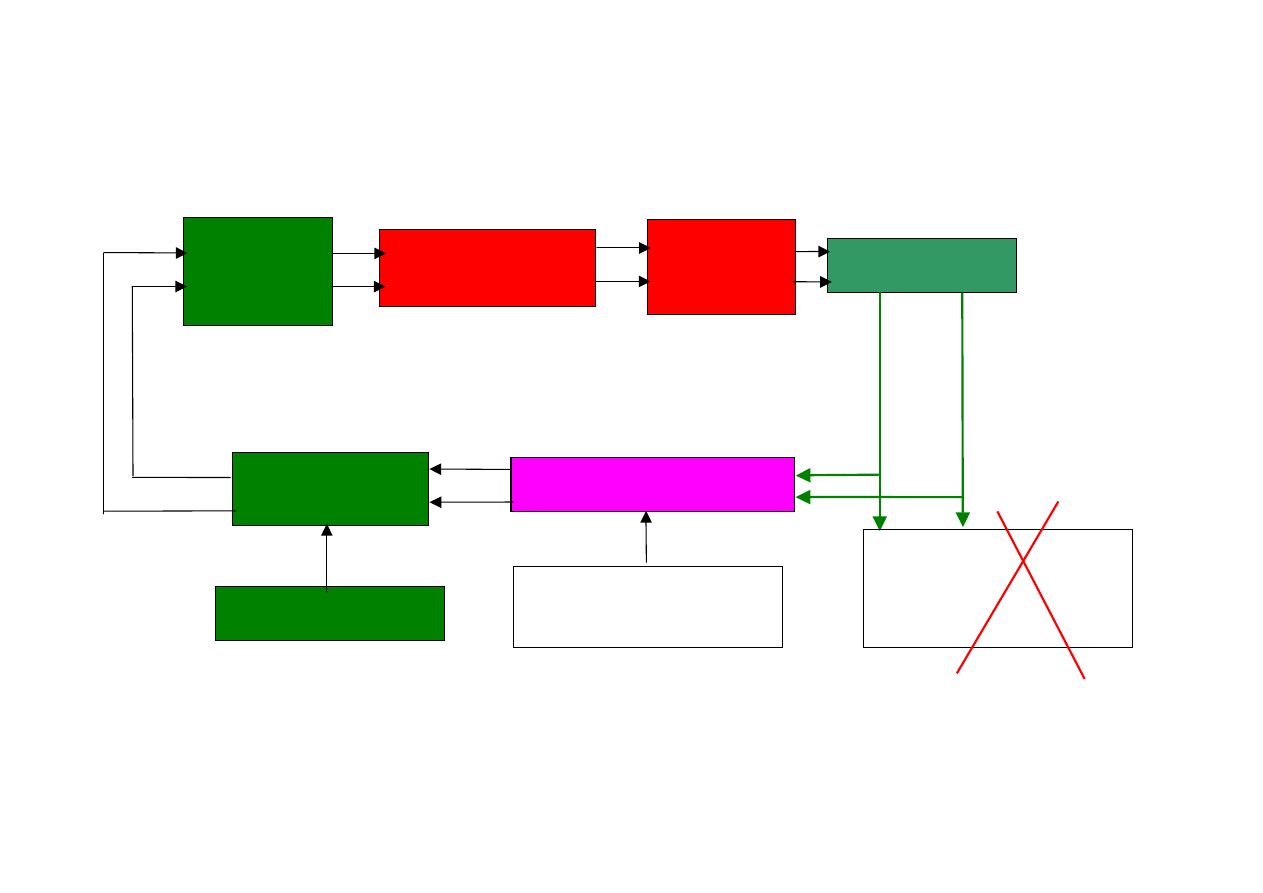
SCHEMAT FUNKCJONALNY UKŁADU MECHATRONICZNEGO
(2-KOŁOWA PLATFORMA MOBILNA)
Tylko informacja o
procesie roboczym
Mikrosterownik tak zaprogramowany, aby w kolejnych chwilach czasu minimalizował
błąd położenia
KOŁA
ROBOTA
SILNIKI
PRĄDU
STAŁEGO
PRZEKŁADNIE
PLANETARNE
ENKODERY
MIKROSTEROWNIK
STEROWNIK
MOCY
AKUMULATOR
α
1
α
2
M
1
M
2
Równanie zadanego
toru robota f(x,y)
ZASILANIE
U
1
U
2
Ocena zgodności
modelu
(walidacja)
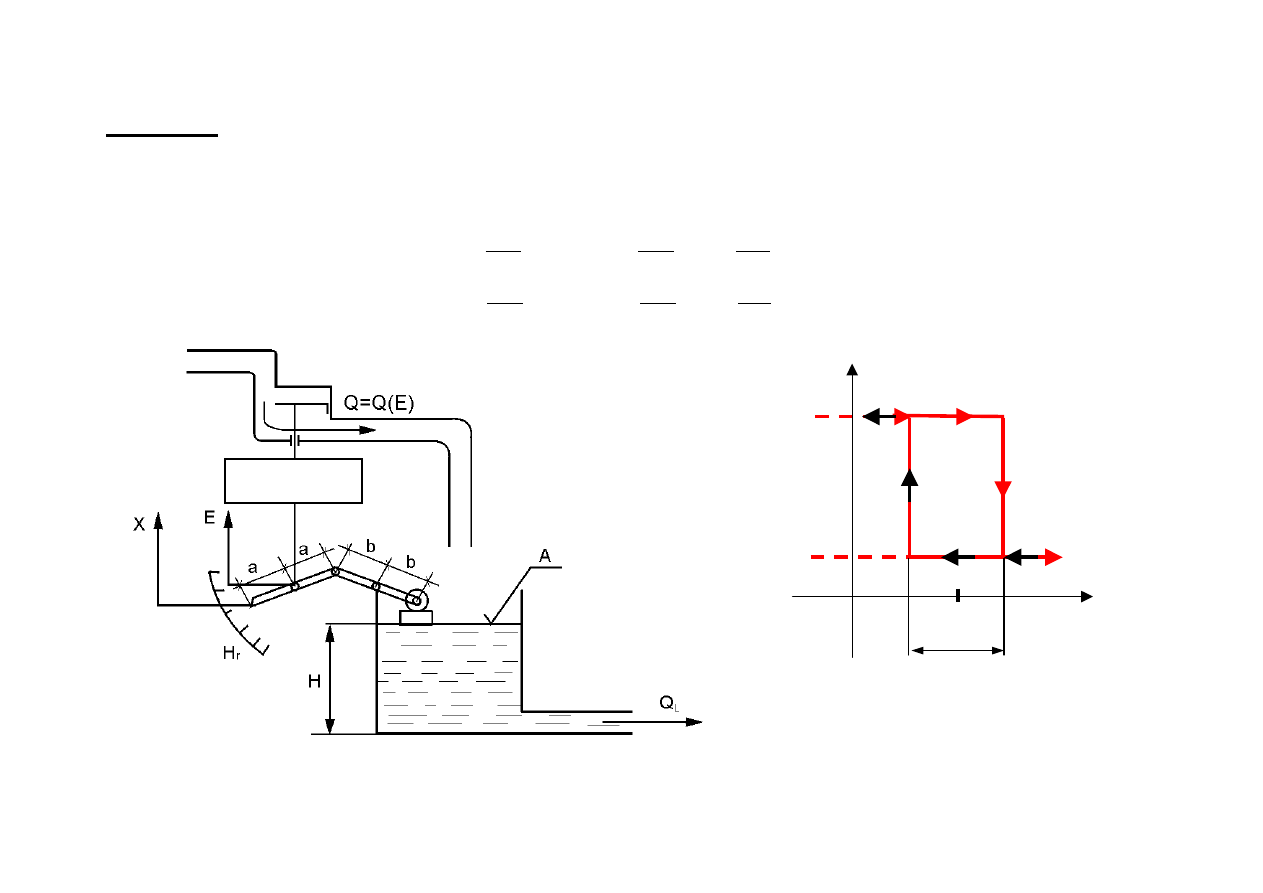
Przykład. Regulacja dwupołożeniowa w układzie sterowania poziomem cieczy w zbiorniku
W układzie występuje przekaźnik dwustanowy, posiadający charakterystykę statyczną
przy czym
PRZEKAŹNIK
DWUSTANOWY
H
Q
Q
1
H
0
Q
2
∆
H
<
∆
+
<
<
∆
−
>
∆
+
<
<
∆
−
=
0
2
2
0
2
2
0
0
2
0
0
1
dt
dH
i
H
H
H
H
H
dla
Q
dt
dH
i
H
H
H
H
H
dla
Q
Q
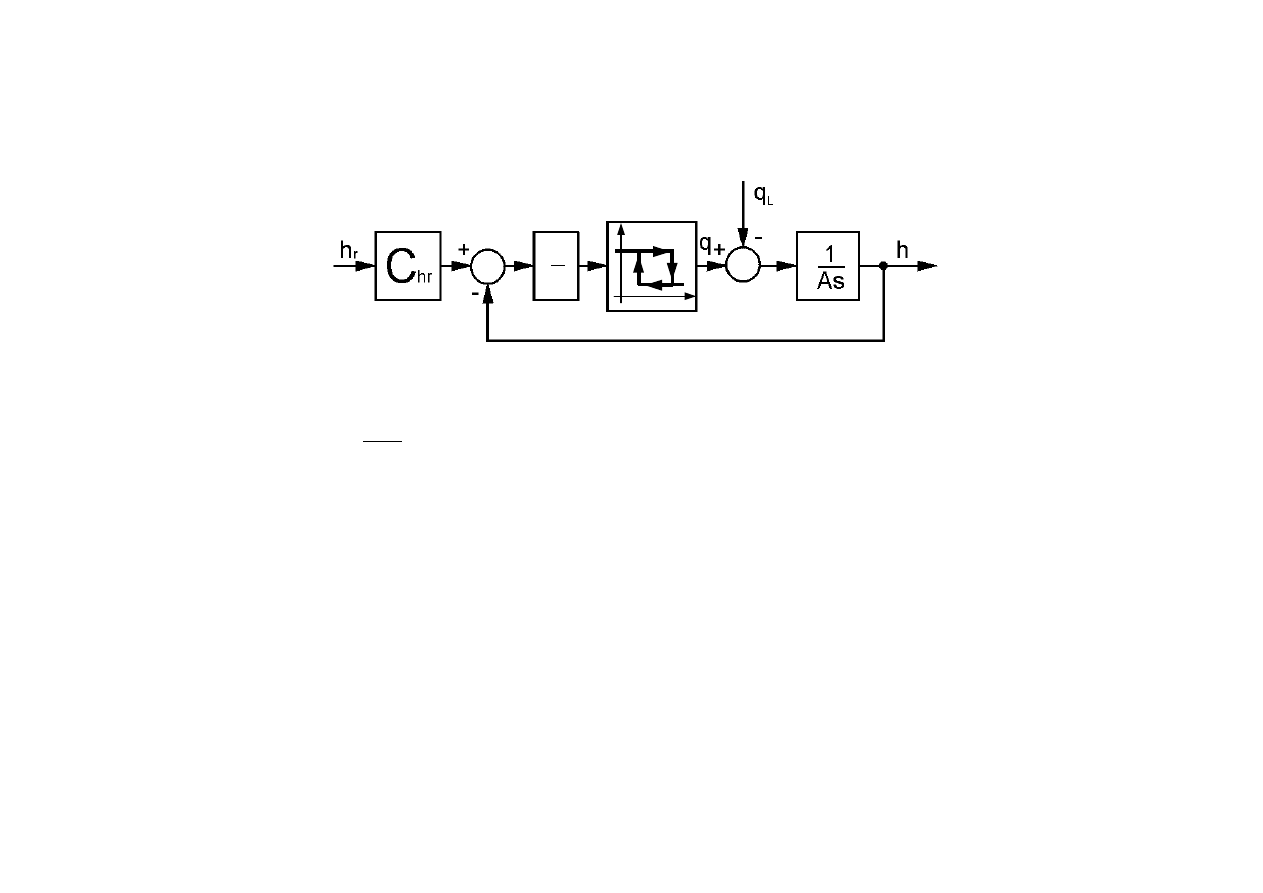
Schemat funkcjonalny układu mechatronicznego
W rezultacie, gdy
2
H
h
∆
±
=
obserwujemy zmianę sygnału nastawczego z Q
1
na Q
2
i odwrotnie.
2
1
Wyszukiwarka
Podobne podstrony:
PM wykład7
PM Wykład12
PM wykłady 4 rok EF cytologia OUN tyton historia
PM wykład5
PM wykład3
PM [R] Wykłady
PM wyklad2 id 363364 Nieznany
PM wykład4
PM wyklad1 id 363363 Nieznany
PM Wykład9
PM wykład7
PM Wykład12
PM wykłady 4 rok EF cytologia OUN tyton historia
PM wykład2
PM Wykład10A
PM wykład7B
więcej podobnych podstron