
Zagadnienia projektowania mechatronicznego
przekształcanie układów konwencjonalnych (mechanicznych,
elektromechanicznych, hydraulicznych) w układy mechatroniczne,
– zachowanie, bądź rozszerzenie zakresu funkcjonalności
– możliwości technologiczne
– obniżenie kosztów – aspekt ekonomiczny
Schematy funkcjonalne tworzone w konwencji schematów blokowych
układów automatyki. Układy automatyki składają się z obiektów (członów) o
znanych własnościach. Własności te określamy za pomocą:
−
transmitancji operatorowej, jeżeli człon jest członem liniowym,
−
charakterystyki statycznej, jeżeli mamy do czynienia z członem
nieliniowym; w takim przypadku znajdujemy punkt pracy tej charakterystyki
oraz dokonujemy jej linearyzacji w otoczeniu tego punktu.
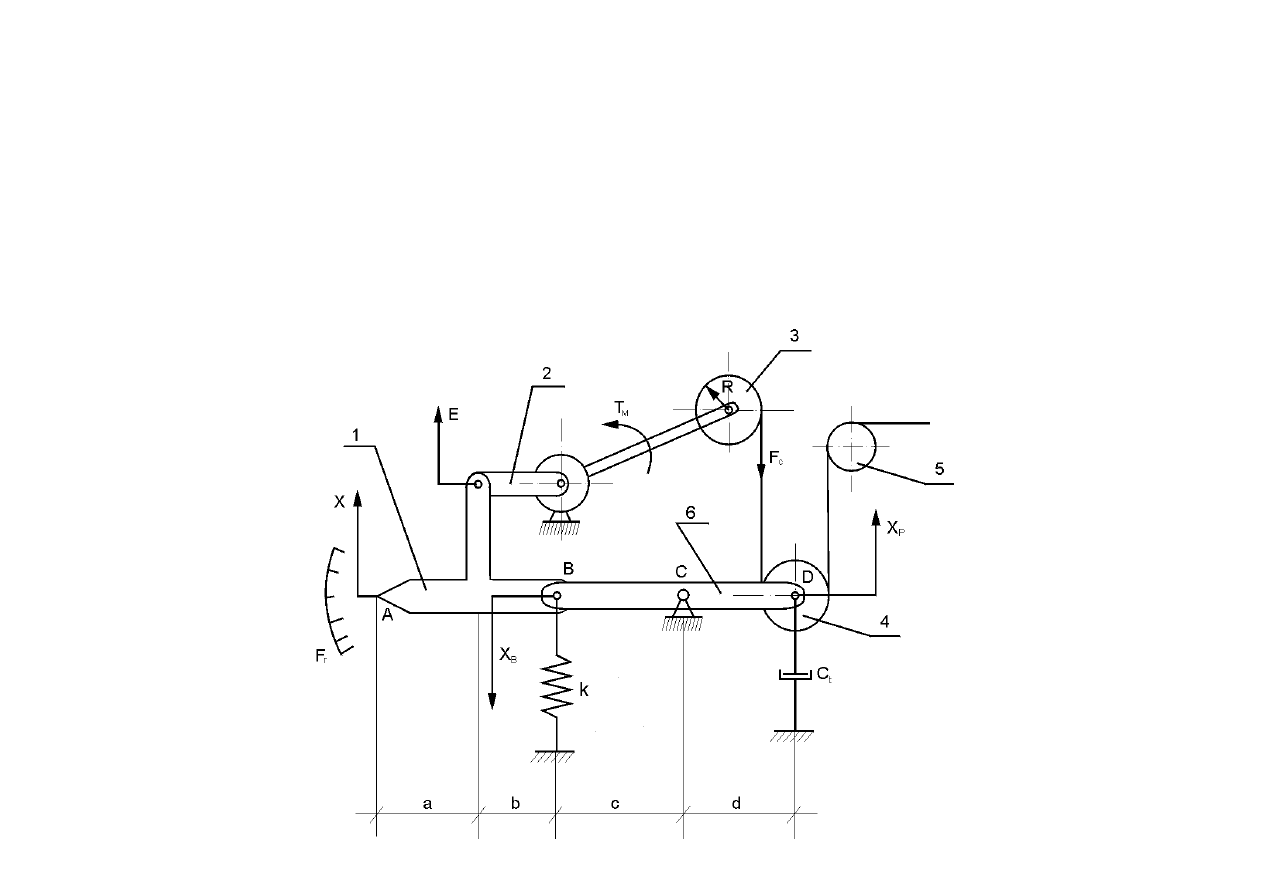
Przykład. Konwencjonalny układ automatycznej regulacji siły F
C
w taśmie nawijanej
na bęben o promieniu R. Regulowana wartość siły ma istotne znaczenie, gdyż:
−
w przypadku gdy jej wartość będzie zbyt duża, może doprowadzić do powstania
zbyt dużych naprężeń rozciągających, a nawet do zerwania taśmy.
−
w przypadku zbyt małej wartości F
C
proces nawijania taśmy na bęben jest
nierównomierny, co może doprowadzić do pofałdowania taśmy.

Zasada działania:
Wartość zadana F
r
siły w taśmie F
C
ustawiona jest na skali (liniowej albo cyfrowej)
za pomocą wskazówki (1), której koniec (A) przyjmuje położenie (X). W rezultacie,
dźwignia sterująca (2) momentem silnika T
M
przyjmuje położenie opisane
współrzędną (E) , siła rzeczywista F
C
wynika natomiast z równowagi statycznej
momentów bębna (3).
Ustawienie wartości zadanej siły w taśmie wymaga właściwego wyskalowania.
1. wariant pracy: gdy siła
r
C
F
F
<
Rolka napinająca (4) opadnie w dół, co spowoduje ustawienie dźwigni (6) w takim
położeniu, że jej lewy koniec (B) przemieszcza się do góry; przy założeniu, że punkt
(A) jest nieruchomy, lewy koniec dźwigni sterującej (2) wędruje do góry co powoduje
wzrost momentu
M
T
aż do uzyskania żądanej wartości rzeczywistej siły
C
F
.
2. wariant pracy: gdy siła
r
C
F
F
>
Rolka napinająca (4) wędruje do góry, lewy koniec dźwigni 6 (B) wędruje do dołu zaś
lewy koniec dźwigni (2) przemieszcza się w dół co powoduje zmniejszenie momentu
M
T
aż do uzyskania wymaganej wartości siły
C
F
.
Do samodzielnego przestudiowania:
1) Zależność pomiędzy wielkościami X oraz
r
F
możemy przedstawić w postaci charakterystyki statycznej
)
(
r
F
X
X
=
,
w ogólnym przypadku nieliniowej. Określamy punkt pracy tej charakterystyki za pomocą współrzędnych
)
,
(
0
0
X
F
r
.
Dokonujemy linearyzacji tej charakterystyki w otoczeniu punktu pracy. Przyjmując oznaczenia
0
X
X
x
−
=
;
0
r
r
r
F
F
f
−
=
otrzymujemy:
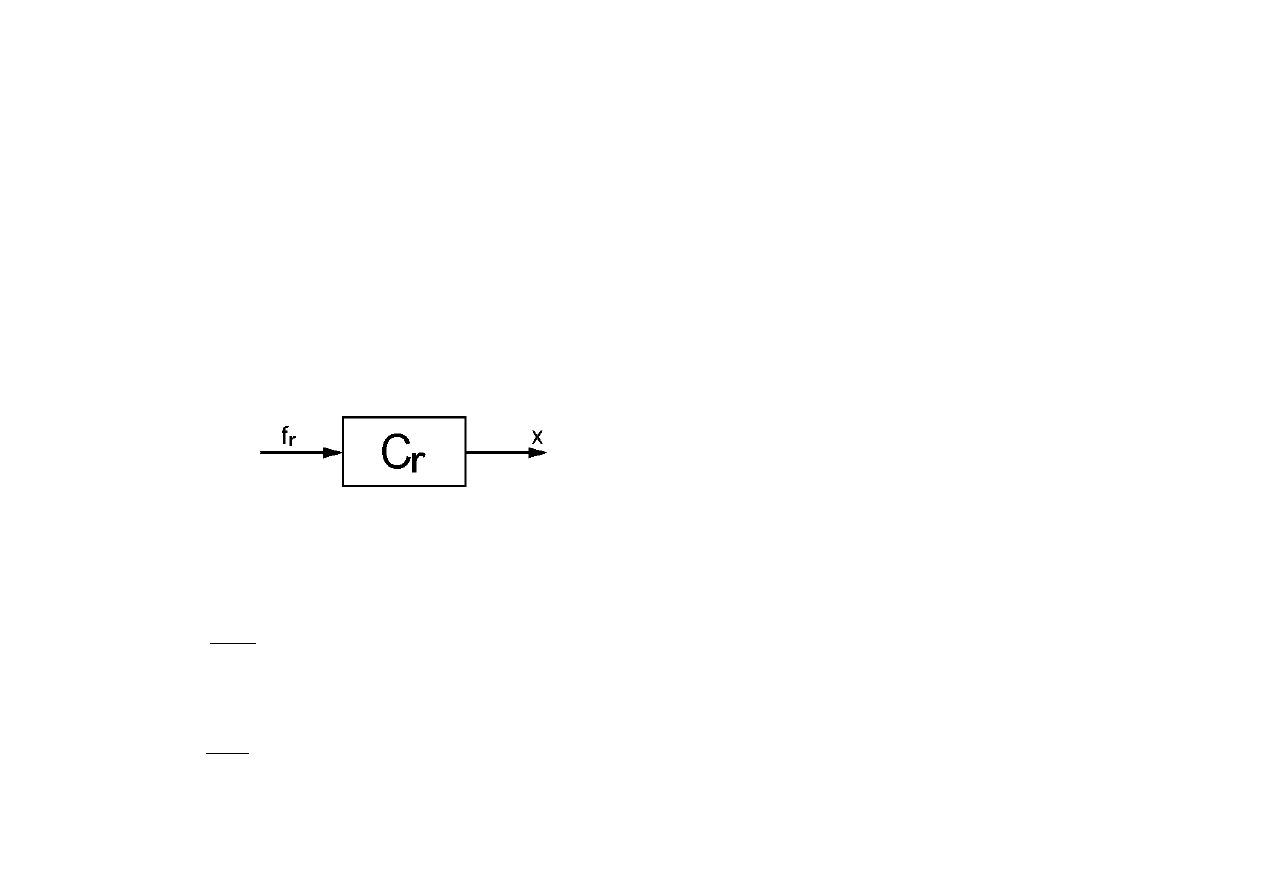
r
r
f
C
x
⋅
=
r
C
- stały współczynnik wynikający z linearyzacji charakterystyki.
2) Poszukujemy zależności:
)
;
(
B
X
X
E
E
=
a)
X
b
a
b
E
X
a
B
⋅
+
=
=
0
b)
B
b
X
b
a
a
E
X
⋅
+
−
=
=
0
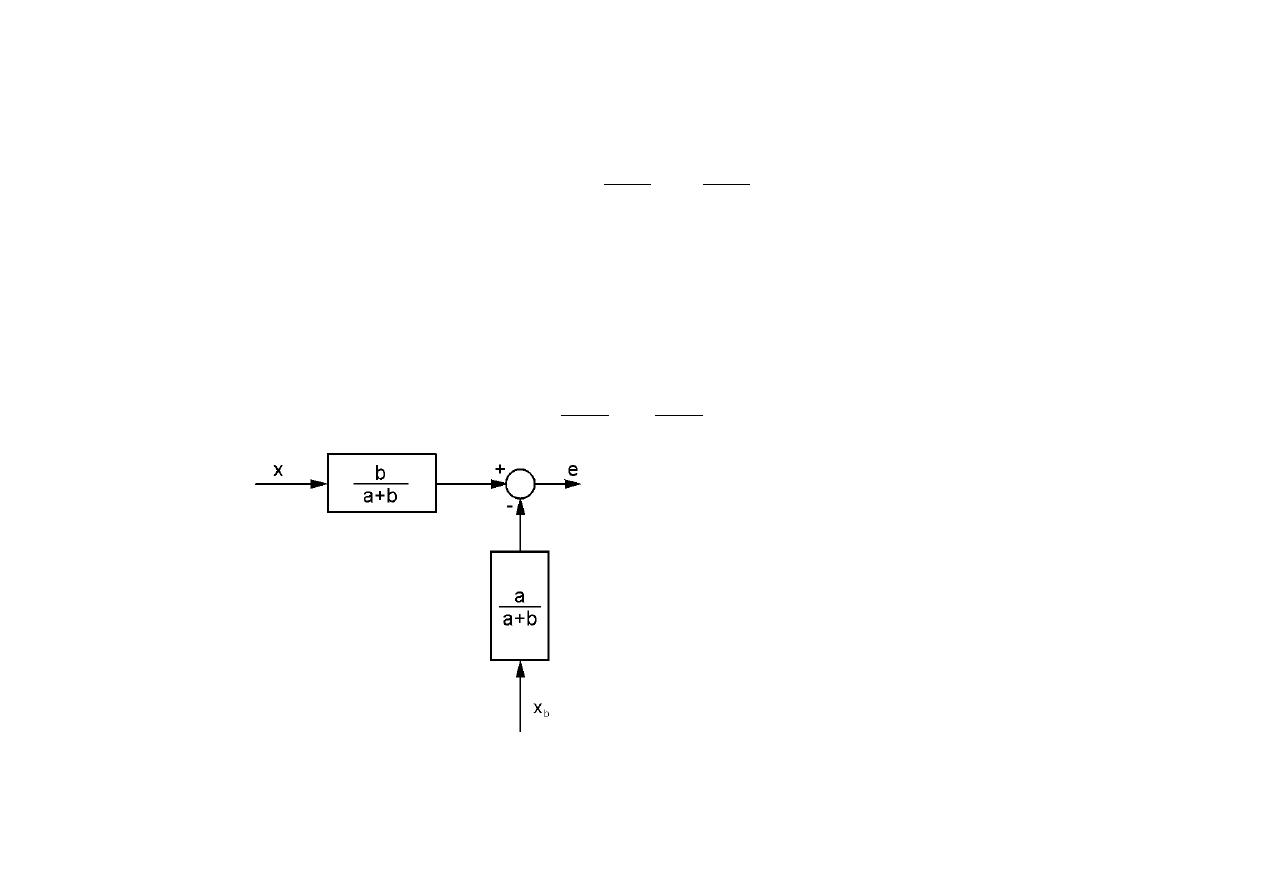
Stosując zasadę superpozycji, otrzymamy:
B
b
a
X
b
a
a
X
b
a
b
E
E
E
⋅
+
−
⋅
+
=
+
=
Przyjmując współrzędne dla punktu pracy tzn.
0
E
E
e
−
=
;
0
X
X
x
−
=
;
0
B
B
B
X
X
x
−
=
otrzymamy:
B
x
b
a
a
x
b
a
b
e
⋅
+
−
⋅
+
=
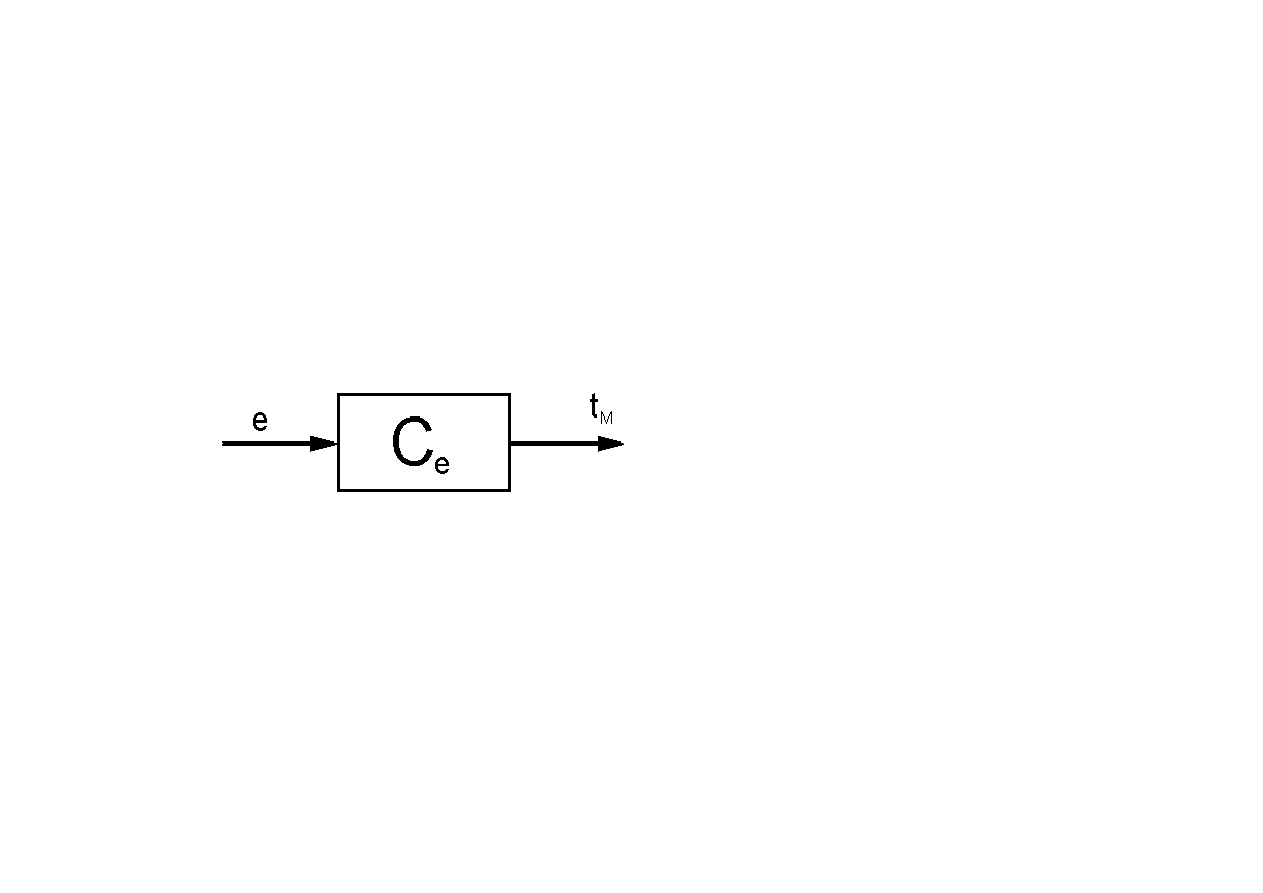
3) silnik elektryczny generuje moment
M
T
)
(E
T
T
M
M
=
- jest to charakterystyka statyczna wyznaczana doświadczalnie
Dokonujemy linearyzacji w otoczeniu punktu pracy o współrzędnych
)
;
(
0
0
M
T
E
W rezultacie otrzymujemy zależność:
e
C
t
e
M
⋅
=
0
, gdzie
0
E
E
e
−
=
;
0
0
M
M
M
T
T
t
−
=
4) Bęben o promieniu R
Z warunku równowagi bębna (3) wynika :
C
M
F
R
T
⋅
=
Zapisujemy tę zależność we współrzędnych mierzonych względem punktu pracy
)
;
(
0
0
C
M
F
T
. Otrzymamy:
0
1
C
C
C
M
C
F
F
f
t
R
f
−
=
⋅
=
5) dźwignia (6)
Przyjmując średnicę rolki (4) znacznie mniejszą od wymiarów dźwigni (6) otrzymamy jej równanie równowagi
w następującej postaci:
d
F
X
kc
X
c
d
c
X
c
d
X
d
F
X
kc
X
d
c
C
B
B
t
B
D
C
B
D
t
⋅
=
⋅
+
⋅
⋅
=
⋅
=
⋅
+
⋅
2
2
2
&
&
Po dokonaniu przekształcenia Laplace’a otrzymujemy zależność:
)
(
2
)
(
2
s
F
kc
s
c
d
c
d
s
X
C
t
B
⋅
+
⋅
⋅
=
Przedstawiając to równanie w postaci przyrostów względem współrzędnych odpowiadających punktowi pracy otrzymamy:
)
(
2
)
(
2
s
f
kc
s
c
d
c
d
s
x
c
t
B
⋅
+
=
Schemat funkcjonalny – wersja konwencjonalna
Schemat funkcjonalny – wersja mechatroniczna
SILNIK
PRĄDU
STAŁEGO
CZUJNIK
PRZEMIESZCZEŃ
MIKRO-
STEROWNIK
WZMACNIACZ
MOCY
x
B
f
R
u
Moment na wale silnika
sterowany dźwignią
- rozwiązanie przestarzałe -
Moment na wale silnika
sterowany napięciem

Projekt oryginalnego urządzenia/procesu mechatronicznego, na bazie
zdefiniowanej zasady działania (funkcji celu)
– integracja elementów składowych rozwiązań mechatronicznych
– preferowane rozwiązania nowoczesne (unikanie wszelkich
anachronizmów)
– aspekt ekonomiczny poszukiwanych rozwiązań
Rezultat: schemat funkcjonalny urządzenia/procesu
mechatronicznego
A

Funkcja celu: minimalizacja błędu położenia punktu A w trakcie ruchu
płaskiego robota po zadanym torze
Wymagania: pomiar położenia punktu A na torze co
∆
t = 0,005 s
(
czas próbkowania
)
Realizacja: – pomiar przyrostowy przemieszczenia kątowego
α
1
i
α
2
kół robota za pomocą enkoderów
– transformacja przemieszczeń kątowych do
współrzędnych x, y opisujących położenie punktu A
– porównania uzyskanego położenia punktu A z zadanym
– wygenerowanie napięcia U
1
i U
2
zasilającego silniki
prądu stałego
– wygenerowanie momentów M
1
i M
2
napędzających koła
robota
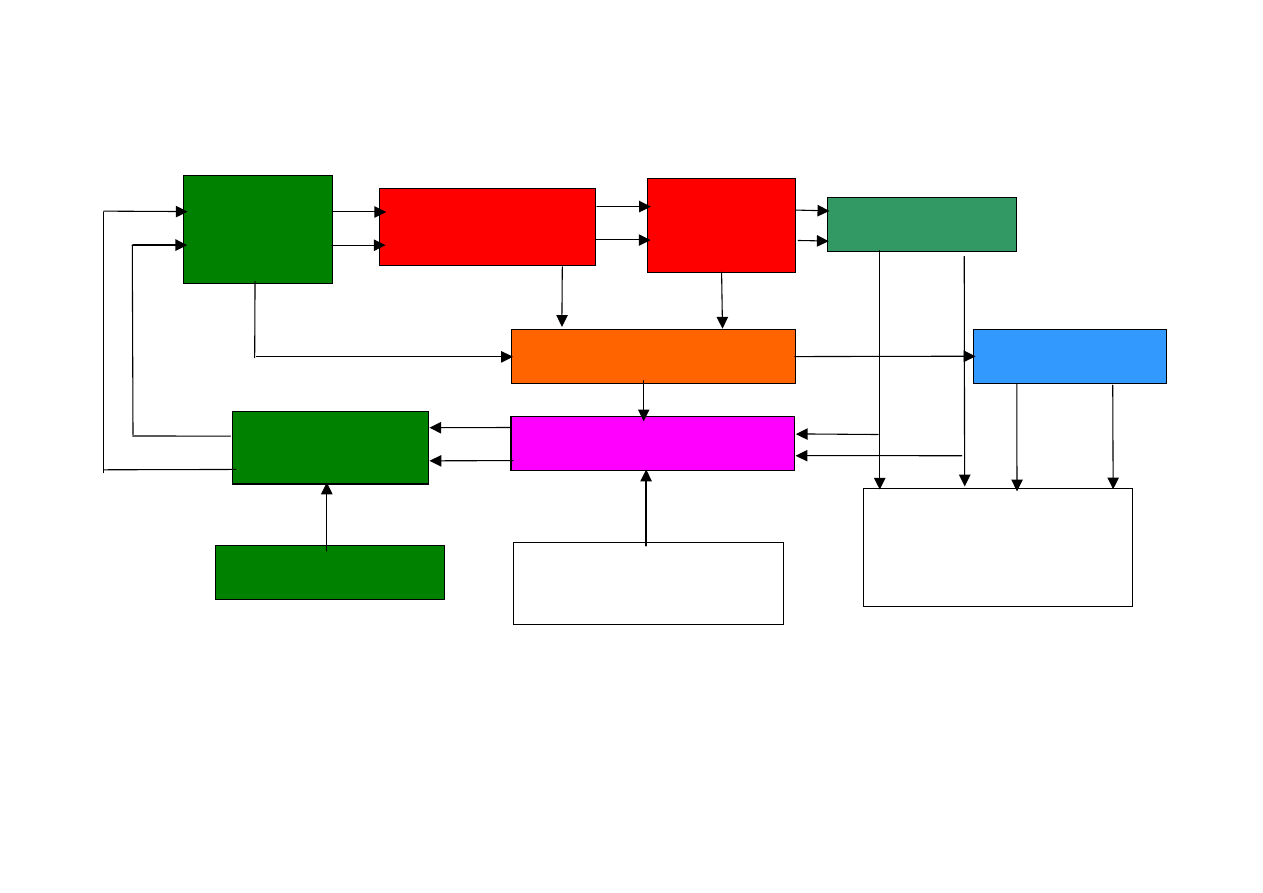
SCHEMAT FUNKCJONALNY UKŁADU MECHATRONICZNEGO
Układ mechatroniczny stwarza jedyną możliwość realizacji funkcji celu
Rozwiązanie niskokosztowe – spełnia kryterium ekonomiczne
KOŁA
ROBOTA
SILNIKI
PRĄDU
STAŁEGO
PRZEKŁADNIE
PLANETARNE
ENKODERY
MIKROSTEROWNIK
STEROWNIK
MOCY
AKUMULATOR
α
1
α
2
M
1
M
2
Równanie zadanego
toru robota f(x,y)
ZASILANIE
U
1
U
2
MODELOWANIE
SYMULACJA
Ocena zgodności
modelu
(walidacja)
α
1S
α
2S
Wyszukiwarka
Podobne podstrony:
PM wykład7
PM Wykład12
PM wykłady 4 rok EF cytologia OUN tyton historia
PM wykład5
PM wykład3
PM wykład6
PM [R] Wykłady
PM wyklad2 id 363364 Nieznany
PM wykład4
PM wyklad1 id 363363 Nieznany
PM Wykład9
PM wykład7
PM Wykład12
PM wykłady 4 rok EF cytologia OUN tyton historia
PM Wykład10A
PM wykład7B
więcej podobnych podstron