
PODSTAWY ROBOTYKI
PR W 13
Bezpieczeństwo pracy na stanowiskach
zrobotyzowanych
1

1. Zagrożenie na zrobotyzowanych stanowiskach pracy
Na samym początku należałoby zastanowić się jakie są cele wprowadzania robotów do
procesów przemysłowych. W uogólnieniu można je sprowadzić do dwóch podstawowych:
Usprawnienie procesów przemysłowych
Możliwość zastąpienia operatorów (ludzi) wszędzie tam gdzie występuje
zagrożenie dla ich życia lub zdrowia (wysoka radiacja, zapylenie, hałas, skrajne
temperatury, trujące wyziewy, zagrożenia fizyczne(kopalnie))
Nie należy jednak zapominać, że robot sam w sobie może stanowić zagrożenie. Dlatego
zarówno projektant jak i osoba obsługująca robota powinni zachować czujność i umieć
przewidzieć nawet najbardziej pozoru niemożliwe sytuacje.
Największe zagrożenie stanowi już nie tyle sam robot, co możliwość jego zetknięcia
zabezpieczeń operatorem. Dlatego przy projektowaniu zabezpieczeń należy przyjąć co
najmniej trzy możliwości bezpośredniego kontaktu operatora z robotem:
W czasie programowania (uczenia) robota
Podczas pracy robota, gdy w jego zasięgu (gnieździe) znajdzie się człowiek
Podczas naprawy i konserwacji
Ze względów bezpieczeństwa konieczne jest więc by obsługa przestrzegała pewnych
określonych zasad zachowywania się ‘w obecności’ robota. Poniżej przedstawiono
przykładowy zestaw norm postępowania dla obsługi robota:
Zmniejszanie prędkości ruchu poszczególnych stopni swobody
Uczenie robota w obecności dwóch osób (bezwzględnie!) (jedna osoba stale gotowa
do zatrzymania robota)
W czasie konserwacji i napraw- odłączanie zasilania w widoczny sposób
Zakaz prób jakiegokolwiek „ułatwiania” pracy robota
Unikanie pośpiechu i niedbałości
Bezwzględny ZAKAZ WCHODZENIA W OBSZAR PRACY ROBOTA, stanowiący
najskuteczniejszą metodę unikania wypadków podczas pracy.
Roboty przemysłowe wyeliminowały wiele tradycyjnych przyczyn wypadków, lecz
wprowadziły nowe zagrożenia, wywołane ich szybkimi i nieprzewidywalnymi ruchami.
Operatorzy stanowiska zrobotyzowanego często stają przed nieoczekiwanymi sytuacjami i
2
mają ograniczony czas na podjęcie decyzji. Dlatego też w celu zabezpieczenia ludzi
obsługujących urządzenia współpracujące (podajniki, odbiorniki) należy dokładnie rozważyć:
Rozmieszczenie urządzeń współpracujących
Instalację przycisków „stop bezpieczeństwa” w odpowiednich miejscach
Oznakowanie stref niebezpiecznych
Dobór pracowników pod względem kwalifikacji
2. Przyczyny wypadków podczas pracy w systemach zrobotyzowanych
Wraz z dynamicznym rozwojem robotyzacji zasadniczo wzrosła liczba wypadków,
która następnie równie szybko zmalała gdy zaczęto zwracać szczególną uwagę na
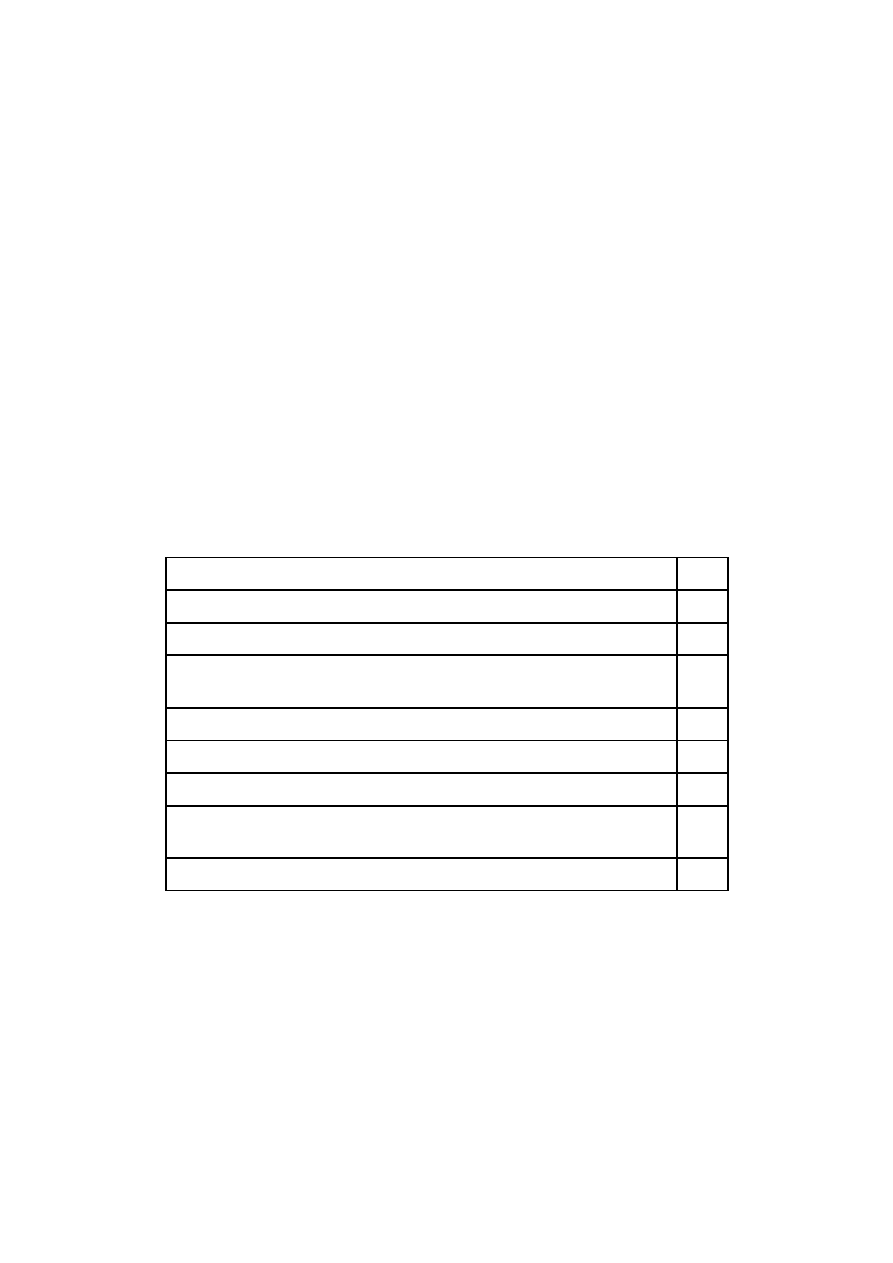
zabezpieczenia. Z zestawienia w tablicy 1 widać, iż najczęstszym powodem powstawania
zagrożeń jest kolizja w obszarze pracy lub też błąd sterowania.
Tablica 1. Procentowy rozkład przyczyn wypadków
Przyczyna
%
Niepoprawny ruch robota podczas programowania
16,6
Niewłaściwy ruch robota podczas testowania programu
16,6
Błąd działania innego obiektu systemu podczas testowania jego
programu
16,6
Błąd podczas regulacji i napraw urządzeń
16,6
Pojawienie się człowieka w strefie roboczej robota
11,2
Nieprawidłowy ruch robota podczas pracy automatycznej
5,6
Błąd pracy innego obiektu systemu podczas pracy automatycznej
robota
5,6
Inne
11,2
Bardzo niebezpieczną przyczyną powstawania wypadków jest nieoczekiwany start robota,
związany najczęściej z awarią poszczególnych podzespołów robota. Z zestawienia w tablicy 2
wynika, że największy wskaźnik procentowy powstałych wypadków- ponad 50%, to defekty
części elektronicznych, które to sterują i kontrolują ruchy poszczególnych stopni swobody.
Tablica 2. Procentowy rozkład przyczyn wypadków
3
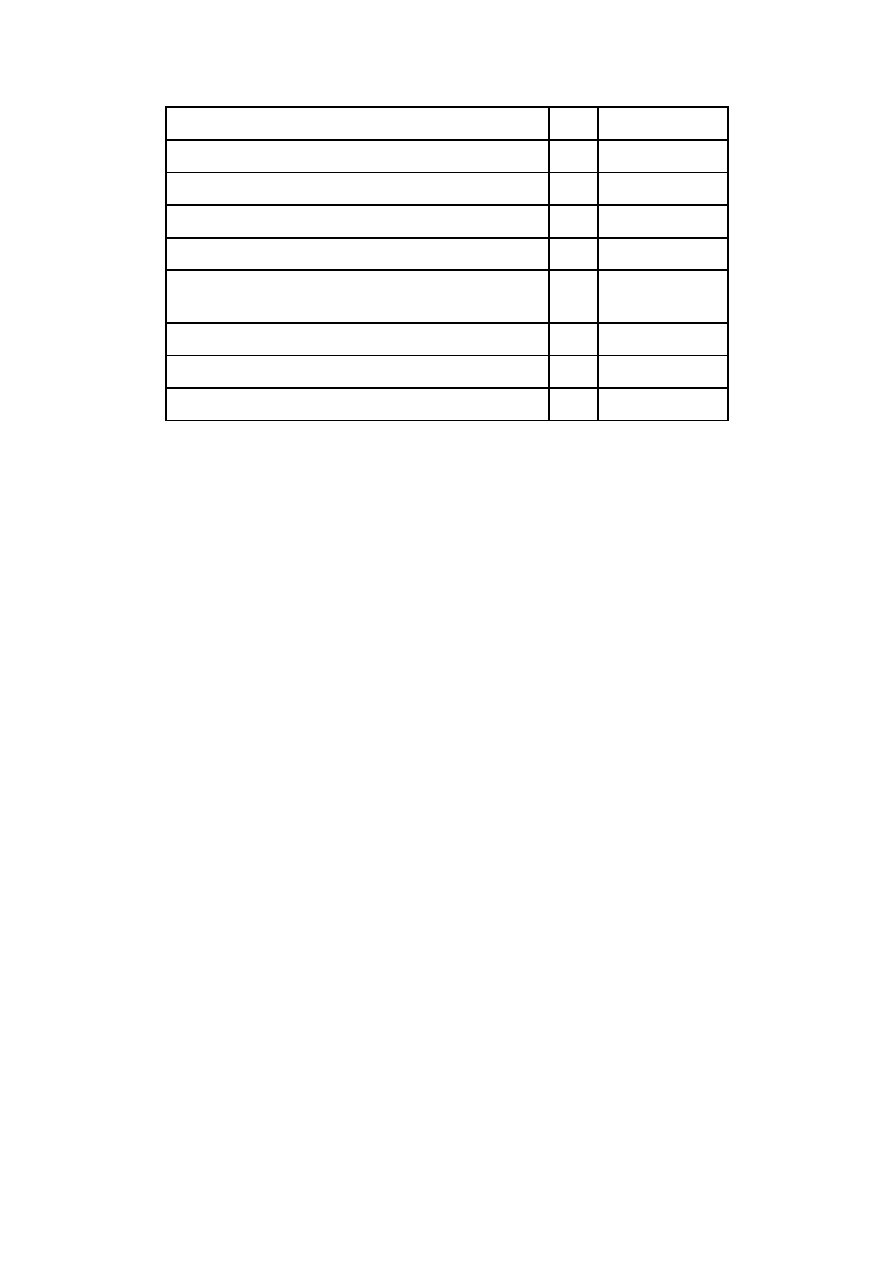
Przyczyna wykonania nieoczekiwanego ruchu
%
% wypadków
Defekt części elektronicznych
52,2
23,9
Defekt części mechanicznych
8,5
5,3
Defekt urządzenia współpracującego z robotem
7,16
6,19
Złe połączenie robot- urządzenie
3,75
8,0
Zanieczyszczenie powietrza, brudny olej,
zakłócenia elektryczne
1,71
0,9
Wypuszczenie lub wyrzucenie przedmiotu
7,51
16,8
Mylna decyzja operatora
18,4
38,1
Inne
0,88
0,81
3. Ogólne zasady bezpiecznej integracji robota z systemem
Podczas tworzenia systemów zrobotyzowanych konieczne jest przestrzeganie
następujących zasad:
1. Tylko robot, oprócz operatora, może wysyłać rozkazy do współpracujących z nim
urządzeń technologicznych
2. Robot musi mieć możliwość stwierdzenia czy konkretne, obsługiwane przezeń
urządzenie wymaga obsługi i czy jest ona w danej chwili możliwa do zrealizowania
3. Konieczne jest blokowanie pracy robota w razie pojawienia się człowieka w strefie
roboczej
4. Niezbędne jest informowanie operatora o stanie systemu jako całości i umożliwienie
mu ingerencji w jego pracę (szczególnie w przypadku uruchamiania nowych
programów i w sytuacjach awaryjnych)
5. Za niezbędną należy uznać separację galwaniczną układów wejścia/wyjścia robota od
otoczenia (warunek konieczny zabezpieczenia go przez poważnymi uszkodzeniami,
które mogą być spowodowane przez wadliwie wykonane połączenia zewnętrzne)
Powyższe zasady można zrealizować bądź sprzętowo, bądź programowo. W każdym
jednak przypadku, zwłaszcza w przypadku programów użytkowych robota i
współpracujących z nim urządzeń, należy zawsze przewidzieć dodatkowe zabezpieczenia
sprzętowe, w celu uniknięcia skutków błędnej obsługi przez operatora, po zaistnieniu
niewłaściwych warunków pracy systemu czy też z powodu wadliwego działania
poszczególnych obiektów systemu
4

4. Metody zabezpieczania systemów zrobotyzowanych
4.1. Podział systemów ochronnych
Systemy ochronne stosowane na stanowiskach zrobotyzowanych są różne w zależności od
strefy ich oddziaływania. Możemy je podzielić na trzy poziomy:
Poziom 1
Wykrywanie obecności człowieka na granicy stanowiska zrobotyzowanego. System
ma za zadanie chronić operatorów i osoby postronne wkraczające w obszar
stanowiska podczas automatycznej pracy robota.
Poziom 2
Wykrywanie obecności człowieka w obszarze stanowiska zrobotyzowanego
Poziom 2a
Obszar stanowiska zrobotyzowanego poza zasięgiem ruchów robota.
Poziom 2b
Obszar stanowiska zrobotyzowanego w strefie ruchów robota. Ochrona
operatorów pracujących z robotem podczas pracy automatycznej w
przypadku awarii lub odłączenia systemów pierwszego poziomu ( lub
niecelowości ich stosowania)
Poziom 3
Wykrywanie obecności człowieka podczas bezpośredniego kontaktu z robotem lub w
niewielkiej odległości od ramienia robota. Ochrona konserwatorów i operatorów
podczas programowania, testowania i konserwacji robotów.
Jeśli chodzi o poziom pierwszy to systemy ochronne są już powszechnie stosowane na
stanowiskach zrobotyzowanych. Pozostałe poziomy są obecnie opracowywane w Centralnym
Instytucie Ochrony Pracy. Ich wdrożenie jest bardzo istotne w celu zapewnienia
odpowiedniego bezpieczeństwa ludziom najbardziej zagrożonym na stanowiskach
zrobotyzowanych.
5
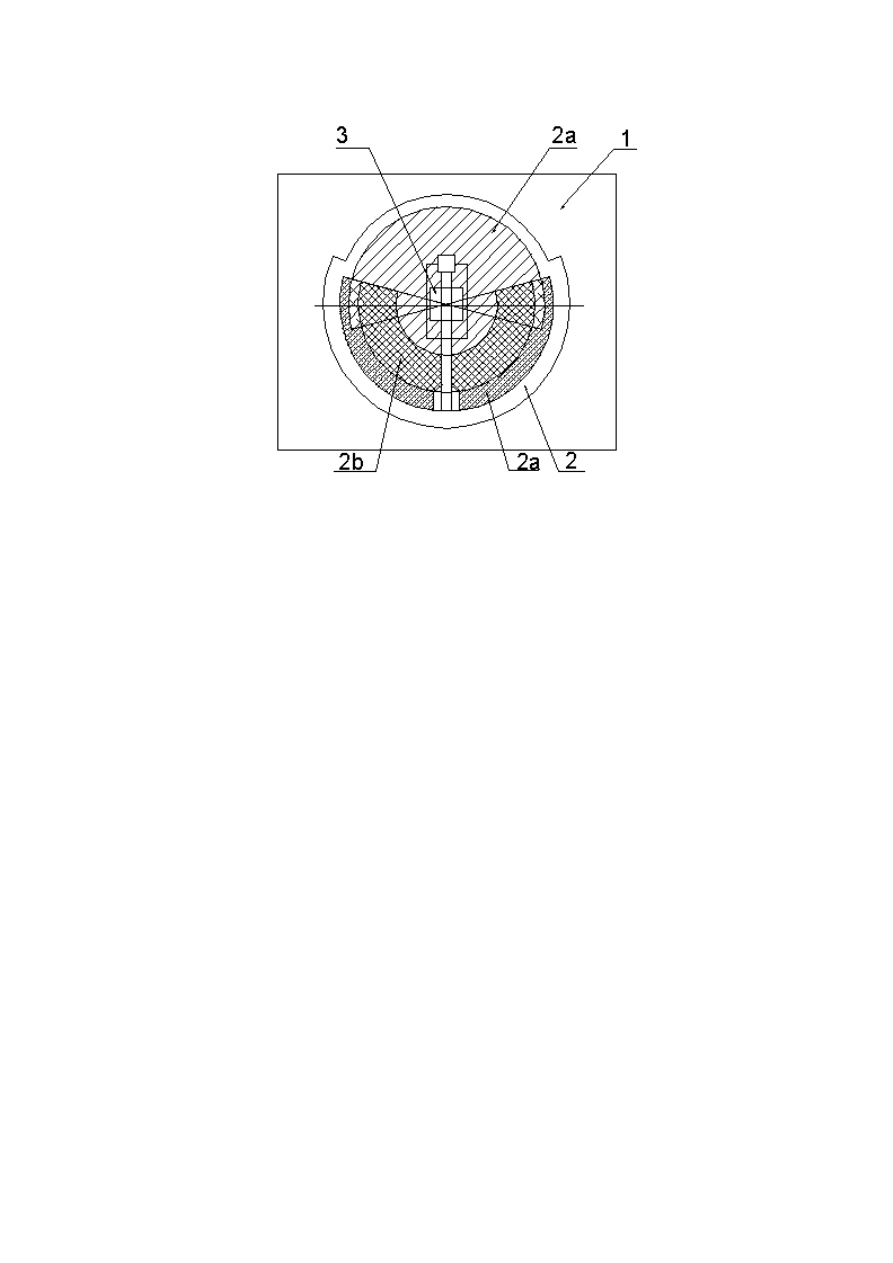
Rys. 1. Podział stanowiska zrobotyzowanego
4.2. Bezpieczeństwo sprzętowe poziomu pierwszego
Pomimo iż ten rodzaj zabezpieczeń łatwo ująć w przepisach, jak dotąd tylko kraje
posiadają odpowiednie normy regulujące zagadnienia BHP związane z systemami
zrobotyzowanymi. Podstawowe wymagania stawiane robotom można by sprowadzić do kilku
najważniejszych podpunktów:
Ograniczenie prędkości ruchu robotów podczas ich uczenia maksymalnie do 0.3 m/s
Konieczność sygnalizacji stanów awaryjnych robotów
Wyposażenie stanowisk zrobotyzowanych w łatwo dostępne przyciski stopu
awaryjnego
Oznaczanie zasięgu pracy robotów (malowanie na podłożu żółtymi pasami lub
odgradzanie całych systemów)
Wspominane odgradzanie nie zawsze musi być sztywną konstrukcją montowaną na stałe,
możliwe jest stosowanie blokad świetlnych czy ultradźwiękowych jako dodatków do osłony
stałej. Skuteczne jest także podzielenie nadzorowanej powierzchni na strefy i ostrzeganie o
przekroczeniu którejś z nich; może być połączone z uruchomianiem zabezpieczeń
potrzebnych dla danego poziomu:
Poziom 1 – sygnał ostrzegawczy
Poziom 2 – spowolnienie pracy robota
Poziom 3 – zatrzymanie robota
6
Jak widzimy bardzo ważne jest zatem odpowiednio szybkie wykrywanie obecności człowieka
w strefach potencjalnego zagrożenia.
4.3. Sposoby wykrywania obecności człowieka na stanowisku
zrobotyzowanym
Używane metody detekcji obecności człowieka na stanowisku zrobotyzowanym nie są
metodami nowymi. Zostały one zaadoptowane z systemów bezpieczeństwa na innych
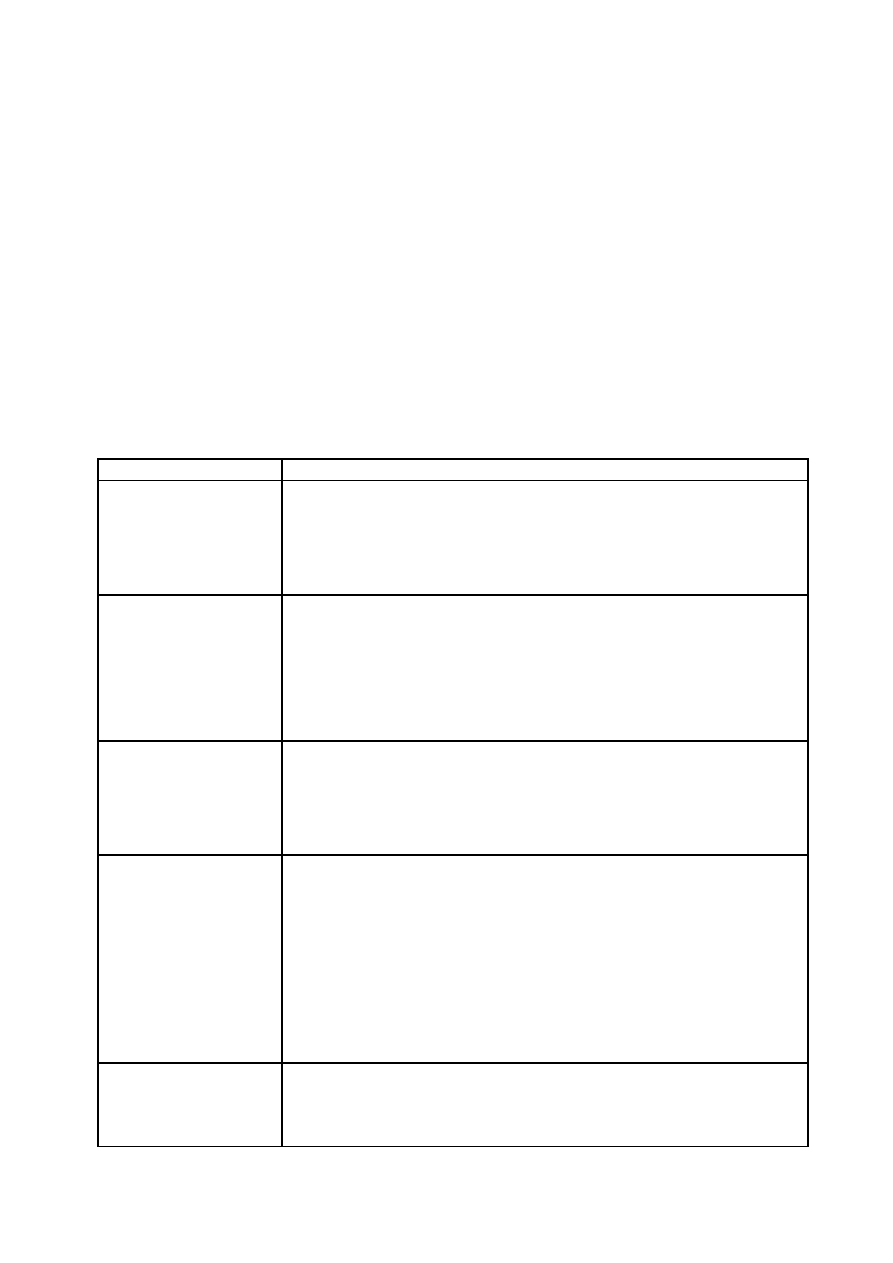
stanowiskach przemysłowych, systemów obronnych czy też antywłamaniowych. W tablicy 3
zostały pokrótce przedstawione wybrane metody detekcyjne.
Tablica 3. Przedstawienie metod detekcyjnych
Nazwa metody
Idea metody
Detekcja
promieniowania
mikrofalowego
Wykrywanie zmian częstotliwości promieniowania mikrofalowego
odbijającego się od człowieka z wykorzystaniem efektu Dopplera.
Czujnik stanowi radar mikrofalowy pracujący naprzemiennie jako
nadajnik i jako odbiornik
Kurtyny
fotoelektryczne
Wykrywanie przerwania ciągłości wiązek promieniowanie
świetlnego, najczęściej podczerwonego, wytworzonego pomiędzy
nadajnikami (dioda LED) a odbiornikami (fototranzystor). Kurtyny
może stanowić wiele stałych wiązek równoległych lub jedna wiązka,
która porusza się wokół obszaru chronionego z dużą częstotliwością.
Detekcja podczerwieni
pasywnej
Wykorzystuje zjawisko promieniowania przez ciało ludzkie fal
elektromagnetycznych o dł. ok. 1μm. Wokół stanowiska
zrobotyzowanego umieszcza się pirometryczne czujniki takiego
promieniowania.
Detekcja podczerwieni
aktywnej
Na system podczerwieni aktywnej składa się nadajnik emitujący
promieniowanie podczerwone i odbiornik tego promieniowania
odbitego od wykrywanej przeszkody. Wzdłuż ramienia robota
rozmieszcza się pary nadajnik – odbiornik. Zależnie od mocy
nadajników i czułości odbiorników odległość wykrywania przeszkody
może być różna.
Detekcja zmian
pojemności
elektrycznej
Wykorzystuje zjawisko zmian przenikalności dielektrycznej
środowiska, wywołane pojawieniem się człowieka w obszarze w
którym pracują czujniki. Jeden z biegunów kondensatora stanowią
7
detektory w postaci ramy osadzonej na ramieniu robota, drugim jest
korpus maszyny lub podłoże. Gdy zmienia się przenikalność
elektryczna wpływa to bezpośrednio na pojemność elektryczną układu
co można wykryć jako zmianę częstotliwości rezonansowej układu.
Od czułości i wymiarów anteny zależy zakres detekcji obecności
człowieka.
Maty naciskowe
Wewnątrz zbudowanej z tworzywa sztucznego lub gumy maty,
umieszcza się łączniki elektryczne np. membranowe. Środkowa
warstwa maty przypomina konstrukcją klawiaturę foliową lub gumę
przewodzącą z układem połączeń równoległych. Fakt, że maty te
mogą występować w postaci niewielkich modułów sprawia, że
możliwe jest ułożenie ich na całej powierzchni stanowiska
zrobotyzowanego w żądanej przez nas konfiguracji.
Detekcja
promieniowania
ultradźwiękowego
Wykorzystuje nadajniki i odbiorniki ultradźwiękowe o wąskokątowej
charakterystyce promieniowania. Odbiorniki odbierają echo sygnału
emitowanego przez nadajniki które to umieszczone są w ramieniu
robota. Odległość od przeszkody określa się na podstawie różnicy
czasu między impulsem wysłanym a odebranym.
Skanery laserowe
Skanowanie płaszczyzny detekcji promieniem laserowym i pomiar
odległości od obiektów ograniczających tę płaszczyznę. Metoda ta
umożliwia zarówno stwierdzenie wejścia w strefę detekcji jak również
sprecyzowanie miejsca, gdzie naruszenie wystąpiło. Czułość
urządzenia zależy od odległości od skanera i zazwyczaj podaje się ją
dla maksymalnego zasięgu strefy detekcji. Skanery laserowa należą
do grupy najnowszej generacji bezdotykowych urządzeń ochronnych.
Systemy wizyjne
Wykorzystuje kamerę CCD. Obraz zarejestrowany przez kamerę jest
sekwencyjnie przesyłany do komputera przetwarzającego. W
opracowanym obrazie są rozpoznawane kontury poruszającego się
robota, człowieka oraz stanowiska. W przypadku pojawienia się
operatora na stanowisku układ nadzorujący ustala jego położenia oraz
możliwość kolizji po uwzględnieniu prędkości, kierunku ruchów oraz
rodzaju pracy wykonywanej przez robota. Czułość systemu zależy od
ogniskowej obiektywu kamery oraz ewentualnego ograniczenia pola
widzenia.
8
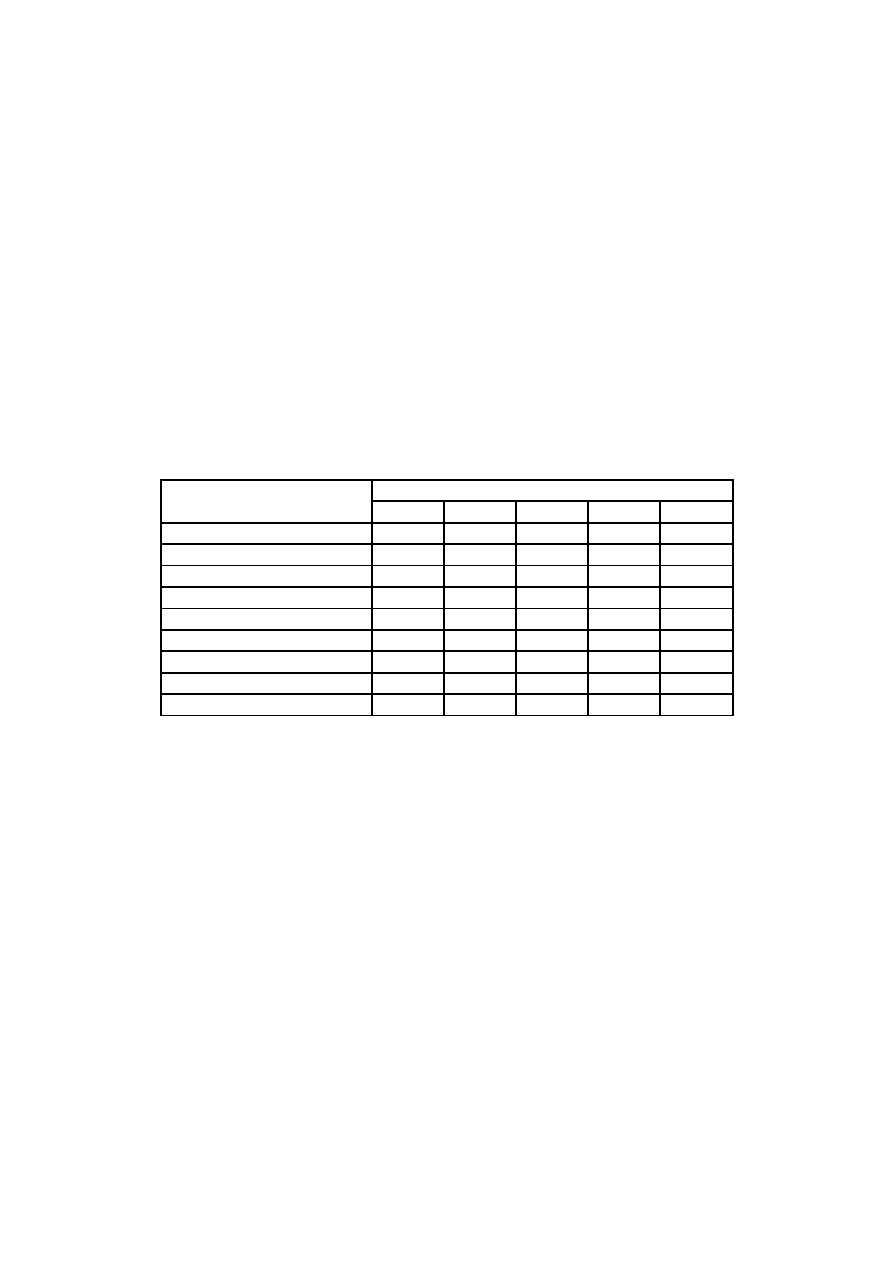
W tablicy 4 dokonano oceny przydatności metody detekcji obecności człowieka pod
względem następujących kryteriów:
(a) możliwość realizacji systemu ochronnego działającego bez modyfikacji na 2 i 3 poziomie
z wykorzystaniem jednej metody i tych samych czujników
(b) niezawodność wykrywania w odpowiedniej odległości od ramienia robota niezależnie do
rodzaju pracy i warunków środowiskowych
(c) odporność na oddziaływanie zakłóceń zewnętrznych powodowanych przez ruchy robota,
temperaturę, wilgotność, wibrację, promieniowanie elektromagnetyczne
(d) możliwość stosowania do różnego typu robotów i różnych stanowisk
(e) niskie koszty produkcji systemu ochronnego.
Tablica 4. Ocena przydatności poszczególnych metod detekcji
Rodzaj metody detekcyjnej
Kryterium
a
b
c
d
e
Mikrofale
+
+
+
Kurtyny fotoelektryczne
+
+
Podczerwień pasywna
+
+
+
Podczerwień aktywna
+
+
+
+
+
Pojemność elektryczna
+
+
+
Maty naciskowe
+
+
+
Ultradźwięki
+
+
+
+
+
Skaner laserowy
+
+
+
+
Analiza obrazów TV
+
+
+
+
Bibliografia
J. Honczarenko „Roboty przemysłowe budowa i zastosowanie” WNT 2004.
9
Document Outline
- Bezpieczeństwo pracy na stanowiskach zrobotyzowanych
Wyszukiwarka
Podobne podstrony:
Bezpieczeństwo i ergonomia na stanowisku pracy, BHP
Bezpieczeństwo i higiena pracy na stanowisku wyposażonym w monitory ekranowe
Bezpieczeństwo i higiena pracy na stanowiskach wyposażonych w monitory ekranowe
INSTRUKCJA BEZPIECZEĹSTWA I HIGIENY PRACY NA STANOWISKU, BHP i PPOŻ przygotowanie do szkoleń, Instr
INSTRUKCJA BEZPIECZEŃSTWA I HIGIENY PRACY NA STANOWISKU
bezpiecze stwa i higieny pracy na stanowiskach wyposa onych w monitory ekranowe QLJCBTMAUSMPQTAICN7Q
wzorcowa instrukcja bhp, INSTRUKCJA BEZPIECZEŃSTWA I HIGIENY PRACY NA STANOWISKU
65 w sprawie bezpieczeństwa i higieny pracy na stanowiskach wyposażonych w monitory ekranowe
Bezpieczeństwo i higiena pracy na stanowiskach wyposażonych w monitory ekranowe
Bezpieczeństwo pracy na dachach(1)
ergonomia pracy na stanowisku z komputerem
Ergonomia pracy na stanowisku wyposażonym w komputer, Politechnika Radom, BHP 1 szkoła
więcej podobnych podstron