Części składowe funkcjonalnego układu napędowego.
Części składowe układu napędowego można pogrupować w zależności od funkcji jakie spełniają.
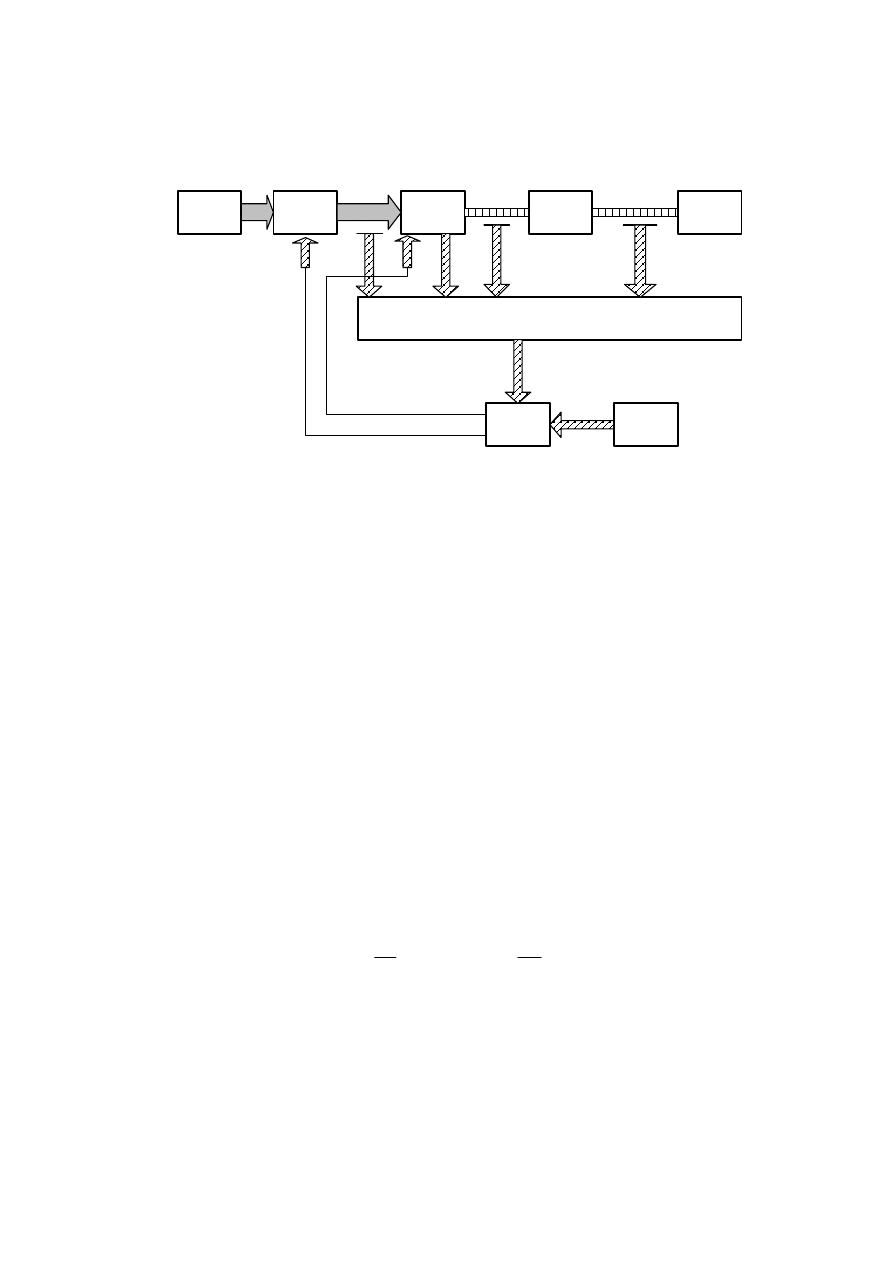
Ogólnie ich wzajemne powiązania pokazano na schemacie blokowym na rys.
E
PE
S
SP
MR
UP
US
Z
Rys. 1.1. Uogólniony schemat funkcjonalny układu napędowego
E- źródło energii elektrycznej
PE- przekształtnik energii elektrycznej
S- silnik
MR- maszyna robocza
UP- układ pomiarowy
US- układ sterujący
Z- zadajnik
Zadania przekształtnika.
Przekształtnik PE może nie tylko dopasowywać poziom napięcia zasilającego (np.
transformator), ale też być elementem sterowanym (np. przetwornica elektromaszynowa,
prostownik sterowany, falownik), dającym na wyjściu regulowane napięcie prądu stałego lub
regulowane, co do amplitudy, częstotliwości i fazy napięcie prądu przemiennego
jednofazowego bądź wielofazowego
Zadania układu pomiarowego.
Zadaniem układu pomiarowego jest wyznaczenie określonych przebiegów rzeczywistych
występujących w systemie. Mogą być to napięcia i prądy, prędkości oraz momenty obrotowe
silnika i maszyny roboczej, temperatura, położenia kątowe, itp. Sygnały pomiarowe ulegają
przekształceniom w układzie sterującym, określając stan pracy napędu,
Co to jest stan ustalony układu napędowego?
Stanem ustalonym w pracy układu elektrycznego nazywamy taki stan, w którym prędkość
obrotowa n i prędkość kątowa ω zespołu, mierzone w dowolnym punkcie układu, mają
wartości stałe, a zatem gdy ich pierwsze pochodne względem czasu t są równe zeru.
0
dt
d
0
dt
dn
=
ω
=
Co to jest moment oporowy?
Moment obrotowy rozwijany przez silnik napędowy oznaczmy przez M, a moment obrotowy
wymagany przez maszynę napędzaną przez Mm; moment ten będziemy nazywać
momentem oporowym.
Moment oporowy będzie się składał z momentu obciążenia Mobc, tj. właściwego momentu
użytkowego i z momentu Mf służącego do pokonania strat w przekładniach, łożyskach i strat
na tarcie powietrza,
f
obc
m
M
M
M
+
=
Jeżeli przyjmiemy, że do momentu Mm wlicza się moment na pokonanie strat w przekładni i
strat mechanicznych w maszynie napędzanej, to gdy M=Mm napęd zachowuje równowagę
dynamiczną, a więc pracuje w stanie ustalonym, tj. przy
dn/dt=0
Układ stabilny i niestabilny.
a) Stabilność układu
M
p
M
m
M
M
p
M
m
M
n
n
p
0
0
n
p
n
a)
b)
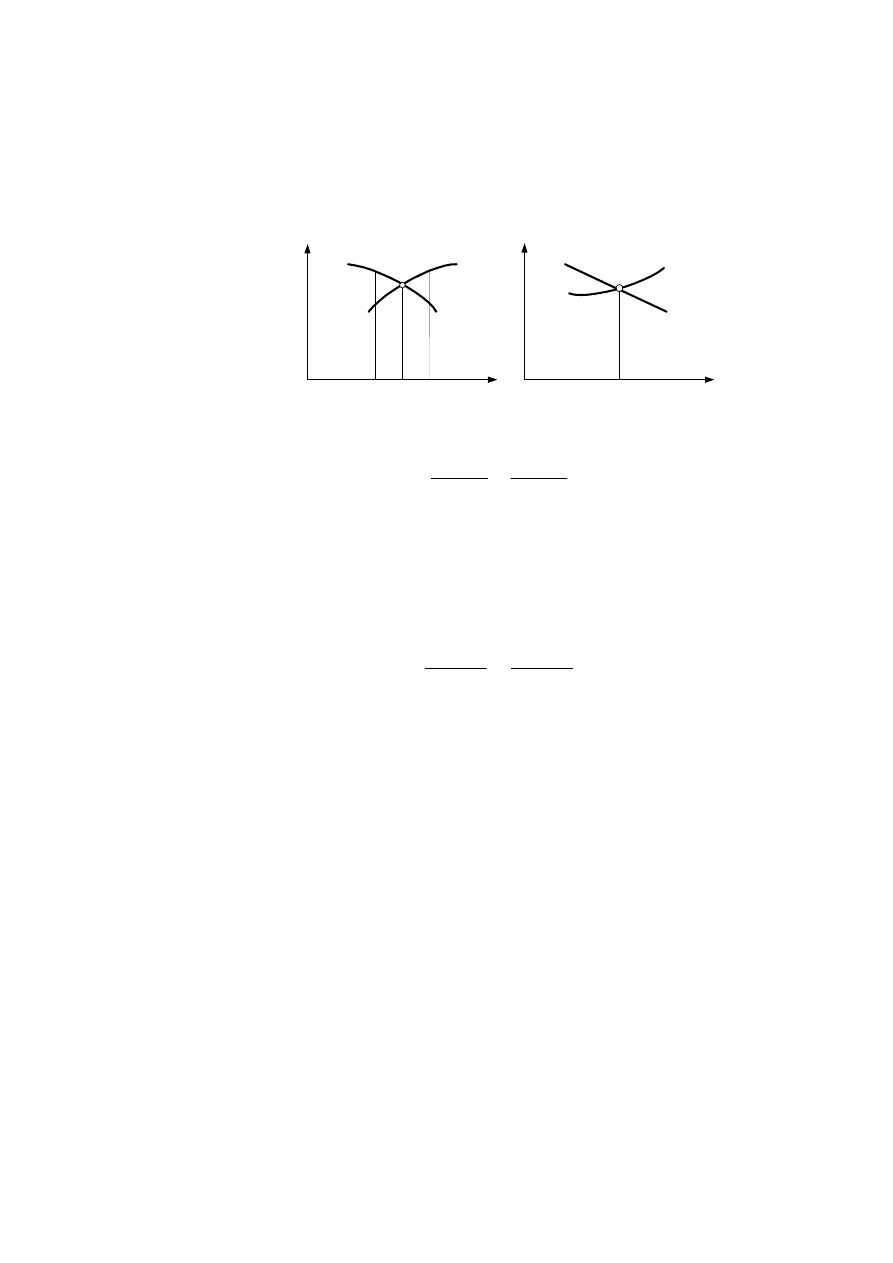
Rys. 1.3. Charakterystyki mechaniczne: a) napęd stateczny, b) napęd niestateczny
Napęd przy prędkości obrotowej n=np. jest stateczny gdy:
p
n
n
p
n
n
m
dn
dM
dn
dM
=
=
>
b) Niestabilność układu
Napęd raz wyprowadzony ze stanu ustalonego więcej do niego powrócić nie może.
Napęd taki jest niestateczny (niestabilny).
W tym przypadku zakłócenie stanu ustalonego napędu pociąga za sobą oddalenie się
punktu pracy zespołu od punktu p pracy w stanie ustalonym.
napęd przy prędkości obrotowej n= np jest niestateczny gdy:
p
n
n
p
n
n
m
dn
dM
dn
dM
=
=
≤
Zakres regulacji.
Zakres regulacji związany jest ze stosunkiem prędkości maksymalnej do prędkości
minimalnej, jakie można osiągnąć przy znamionowym prądzie i napięciu, zwykle określanych
liczbowo
Np. w tokarkach do metalu zakres regulacji może się zawierać w granicach (20/120): 1, w
wiertarkach pionowych (2/12):1, we frezarkach (20/30):1 itp. W przypadku gdy ze względów
technologicznych wymagana jest prędkość napędu w obu kierunkach mówimy o napędzie
nawrotnym.
Kierunek regulacji.
Kierunek regulacji zwiększenie lub zmniejszenie prędkości kątowej w stosunku do jej
wartości znamionowej (odpowiednio regulacja w górę lub w dół)
Płynność regulacji.
Stosunek dwóch najbardziej zbliżonych do siebie, możliwych do uzyskania prędkości
kątowych, jest ona tym większa im więcej jest stopni regulacji w danym zakresie. Płynność
regulacji związana jest z rodzajem regulatora. Regulatory mogą podawać do układu sygnały
zmieniające się skokowo lub płynnie.
Podział silników prądu stałego.
- ze wzbudzeniem magnetoelektrycznym (silniki bocznikowe, szeregowe, bocznikowo
szeregowe, obcowzbudne), z reguły budowane z wirnikiem cylindrycznym,
- ze wzbudzeniem na magnesach trwałych.
Podział silników indukcyjnych.

- silniki klatkowe (np. sterowane poprzez zmianę liczby par biegunów; sterowane przy użyciu
falowników przez zmianę częstotliwości; sterowane poprzez zmianę napięcia przy użyciu
tyrystorowych układów; pracujące z prędkością nieregulowaną; jednofazowe z
kondensatorem pracy),
- silniki pierścieniowe (sterowane przez zmianę rezystancji w obwodzie wirnika stycznikowo
lub przekształtnikowo),
- silniki liniowe (zaliczane do silników klatkowych) o prostoliniowym ruchu biegnika
względem induktora (biegnik wykonany jako klatkowy lub z litej stali).
Co to jest moc znamionowa [dot. silnika i prądnicy]?
Moc znamionowa PN wyrażona w W, mierzona na wale dla wszystkich silników lub mierzona
na zaciskach twornika dla prądnic prądu stałego,
Prąd znamionowy silnika/prądnicy.
Prąd znamionowy IN wyrażony w A, pobierany ze źródła przez silnik w warunkach zasilania i
obciążenia znamionowego lub prąd wydawany z zacisków twornika prądnicy,
Klasy izolacji.
klasa A (temp. 105oC),
klasa E (temp. 120oC),
klasa B (temp. 130oC),
klasa F (temp. 155oC),
klasa H (temp. 180oC).
Oznaczenia maszyn [tylko nowe oznaczenia].
Przykłady oznaczenia pełnego maszyny
STHg 90L 24 IM 1001 IP54 IC01 TP 211
Oznaczenie pełne literowo-cyfrowe zawiera kolejno wymienione poniżej cechy maszyny:
a) rodzaj maszyny oznaczona pierwsza litera symbolu:
A – prądnica prądu stałego,
G – prądnica synchroniczna,
R – silnik synchroniczny,
S – silnik indukcyjny,
P– silnik prądu stałego,
K – silnik komutatorowy prądu przemiennego 1-fazowego,
C – silnik komutatorowy prądu przemiennego 3-fazowy,
b) cechy uzwojeń dla prądnic i silników – druga litera informuje o cechach twornika oraz o
cechach uzwojenia pierwotnego maszyn typu G, R, S należy :
T –
uzwojenie trójfazowe,
D –
uzwojenie dwufazowe,
I –
uzwojenie jednofazowe (w maszynie bez uzwojenia rozruchowego lub
pomocniczego),
W –
uzwojenie wielofazowe (liczba pasm fazowych >3),
c) trzecia litera mówi o cechach wzbudzenia maszyn komutatorowych i synchronicznych oraz
o cechach wirnika silnika indukcyjnego i tak np.:
Cechy wzbudzenia maszyn A, P, K i C należy oznaczać następującą literą
S –
szeregowe,
B –
bocznikowe,
C –
szeregowe z dowzbudzeniem bocznikowym,
A –
bocznikowe z dowzbudzeniem szeregowym,
O –
obcowzbudne,
M –
wzbudzenie magnesami trwałymi i inne.
Cechy wzbudzenia maszyn G i R należy oznaczać następującą literą:
U –
magneśnica o biegunach utajonych z klatką tłumiącą,
S –
magneśnica o biegunach utajonych bez klatki tłumiącej,
N –
magneśnica o biegunach wydatnych z klatką tłumiącą,

P –
magneśnica o biegunach wydatnych bez klatki tłumiącej,
K –
wirnik o biegunach kłowych,
M –
maszyna o magnesach trwałych i inne.
Cechy budowy wirnika maszyn S należy oznaczać następującą literą:
N –
trójfazowy klatkowy o normalnym momencie, przeznaczony do rozruchu
bezpośredniego,
NY –
trójfazowy klatkowy o normalnym momencie, przeznaczony do rozruchu przy
pomocy przełącznika gwiazda – trójkąt,
H –
trójfazowy klatkowy o dużym momencie, przeznaczony do rozruchu
bezpośredniego,
HY –
trójfazowy klatkowy o dużym momencie, przeznaczony do rozruchu przy
pomocy przełącznika gwiazda – trójkąt,
K –
klatkowy (poza trójfazowym) o normalnych parametrach rozruchowych,
D –
klatkowy (poza trójfazowymi) o podwyższonych parametrach rozruchowych,
U –
pierścieniowy,
d) czwarta litera oznaczenia dla maszyn komutatorowych i synchronicznych informuje o
cechach uzwojeń dodatkowych np.:
Cechy dodatkowe maszyn A, G, R, P należy oznaczać następującą literą:
K –
maszyna z uzwojeniem kompensacyjnym,
Z –
bez uzwojenia kompensacyjnego z biegunami zwrotnymi,
N –
maszyna bez uzwojenia kompensacyjnego i z niepełną liczbą biegunów
zwrotnych,
O –
maszyna bez uzwojenia kompensacyjnego i biegunów zwrotnych,
e) seria maszyny (mała litera – wg oznaczeń producenta),
f) wielkość mechaniczna, wznios wału, rozstaw otworów mocujących i itd.,
g) forma wykonania
h) stopień ochrony ,
i) sposób chłodzenia :
j) środowisko pracy (wg oznaczeń producenta),
k) przeznaczenie specjalne (wg oznaczeń producenta),
l) wyposażenie specjalne.
Charakterystyki mechaniczne maszyn napędzanych.
x
n
0
m
mn
0
m
m
n
n
)
M
M
(
M
M
−
+
=
W którym:
Mm0 – moment oporowy wywołany tarciem w częściach ruchomych,
Mmn – moment oporowy urządzenia przy prędkości znamionowej,
nn– prędkość znamionowa.
Wykładnik potęgowy X będzie miał zależnie od rodzaju urządzenia różne wartości. Należy
zauważyć, że równanie (2.2) jest słuszne tylko wówczas, gdy n≠0. Jeżeli prędkość jest równa
zeru, będzie występował inny moment oporowy niż Mm0, wywołany tarciem spoczynkowym.
Moment ten w typowych łożyskach maszynowych jest większy od momentu tarcia
ruchowego.
Można wyróżnić cztery grupy maszyn napędzanych, które opisane równaniem (2.2), różnić
się będą wykładnikiem potęgowym X.
Gdy X = 0, moment oporowy jest niezależny od prędkości wirowania (krzywa 1 na rys. 2.1).
Do tej grupy należą takie urządzenia mechaniczne jak suwnice, dźwigi, maszyny wyciągowe,
obrabiarki, walcarki, przenośniki taśmowe.
M
m
n
0
M
m0
2
1
3
4
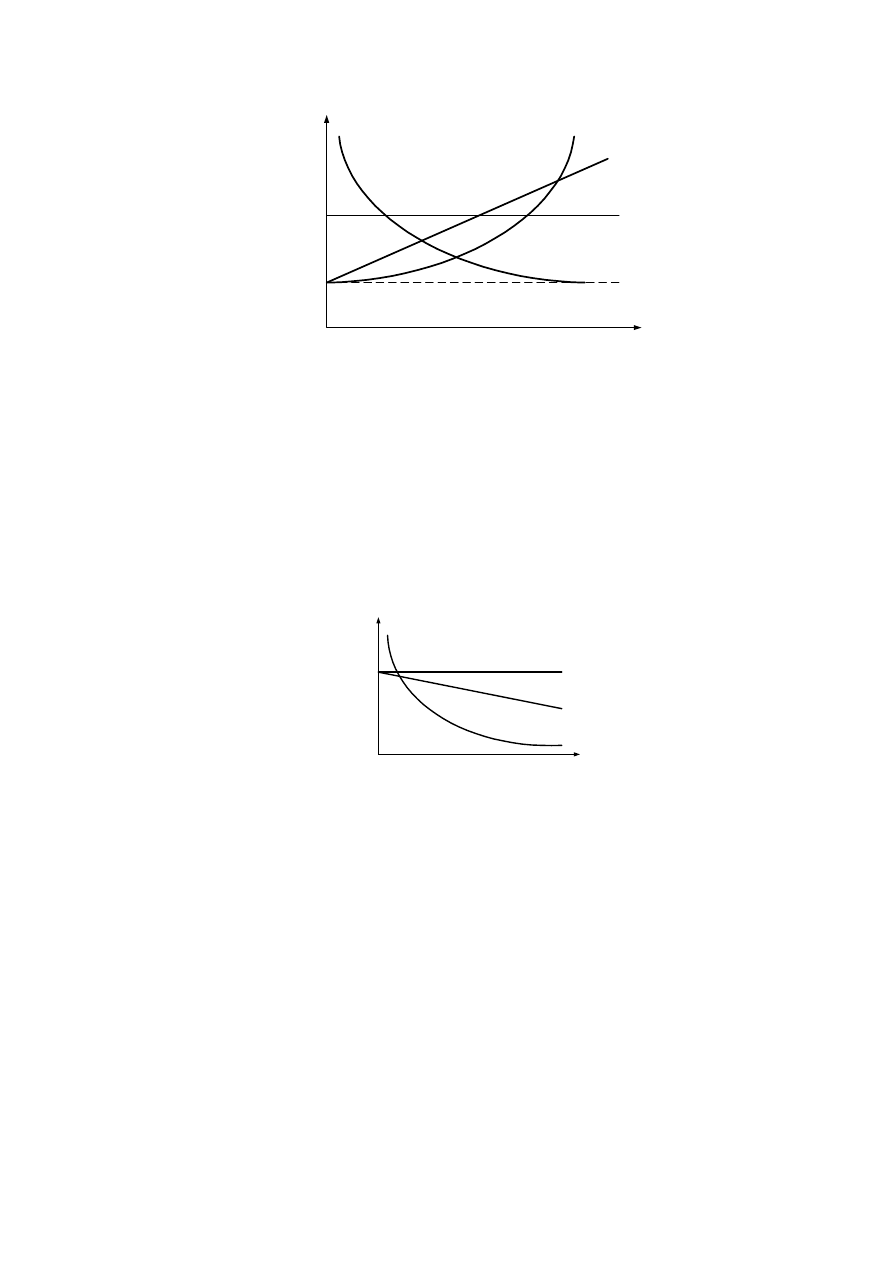
Rys. 2.1. Charakterystyki mechaniczne typowych urządzeń mechanicznych
Gdy X = 1 moment oporowy zmienia się liniowo w funkcji prędkości (krzywa 2 na rys. 2.1).
Taką charakterystykę mechaniczną będzie miała obcowzbudna prądnica prądu stałego,
obciążona stałą rezystancją.
Gdy X=2 uzyskuje się charakterystykę mechaniczną w kształcie paraboli (krzywa 3 na rys.2.1).
Do tej grupy należą urządzenia oparte na zasadzie siły odśrodkowej, a mianowicie pompy
odśrodkowe, wentylatory, turbosprężarki, śruby okrętowe. Taką charakterystykę nazywamy
w praktyce wentylatorową.
Gdy X=−1 uzyskuje się charakterystykę mechaniczną w kształcie hiperboli (krzywa 4 na
rys.2.1). Tego typu charakterystykę wykazują urządzenia do nawijania i rozwijania taśm i
wstęg,
Charakterystyk mechaniczne maszyn napędzających.
n
0
M
1
2
3
Rys. 2.3. Charakterystyki mechaniczne silników elektrycznych: 1 – idealnie sztywna, 2 –
sztywna, 3 - podatna
Zasadniczo spotykamy się z trzema rodzajami charakterystyk mechanicznych silników
elektrycznych, a mianowicie: idealnie sztywną, sztywną i podatną (rys. 2.3).
Prędkość obrotowa silnika o charakterystyce mechanicznej idealnie sztywnej jest stała i nie
zależy do wielkości rozwijanego momentu. Taką charakterystykę mają silniki synchroniczne.
Jeżeli ze wzrostem obciążenia prędkość obrotowa silnika maleje nieznacznie, praktycznie
biorąc liniowo i mówimy wtedy, że charakterystyka mechaniczna silnika jest sztywna. Do
grupy tej zaliczmy silniki bocznikowe prądu stałego, silniki asynchroniczne i silniki bocznikowe
komutatorowe prądu przemiennego. Taką charakterystykę nazywamy często bocznikową.
Jeżeli ze wzrostem obciążenia prędkość maleje bardzo znacznie, prawie hiperbolicznie,
mówimy, że charakterystyka mechaniczna takiego silnika jest podatna (miękka).
Charakterystykę mechaniczną podatną mają silniki szeregowe prądu stałego i komutatorowe
prądu przemiennego, jednofazowe oraz trójfazowe.
Co to jest charakterystyka naturalna/sztuczna?
Charakterystyką mechaniczną naturalną nazywamy taką charakterystykę, która występuje
przy znamionowych parametrach sieci zasilającej, przy normalnym włączeniu oraz braku
elementów dodatkowych w obwodach elektrycznych. Wszystkie inne charakterystyki
mechaniczne nazywamy sztucznymi
Co to jest moment aktywny/reaktywny?
W praktyce spotykamy również urządzenia mechaniczne o zmiennej energii potencjalnej. Dla
przykładu rozpatrzymy pracę wciągarki w urządzeniach transportu pionowego. W trakcie
podnoszenia ciężaru wzrasta jego energia potencjalna. Urządzenie jest odbiornikiem energii.
Przy zmianie kierunku wirowania, w trakcie opuszczania ciężaru, mechanizm staje się
wydajnikiem energii. Stąd wniosek, że ze zmianą kierunku wirowania zmienia się znak mocy
na wale, a więc znak momentu oporowego nie ulega zmianie. Taki moment to moment
aktywny.
Moment oporowy urządzeń, które bez względu na kierunek ich wirowania są zawsze
odbiornikami energii mają moment oporowy nazywany momentem reaktywnym.
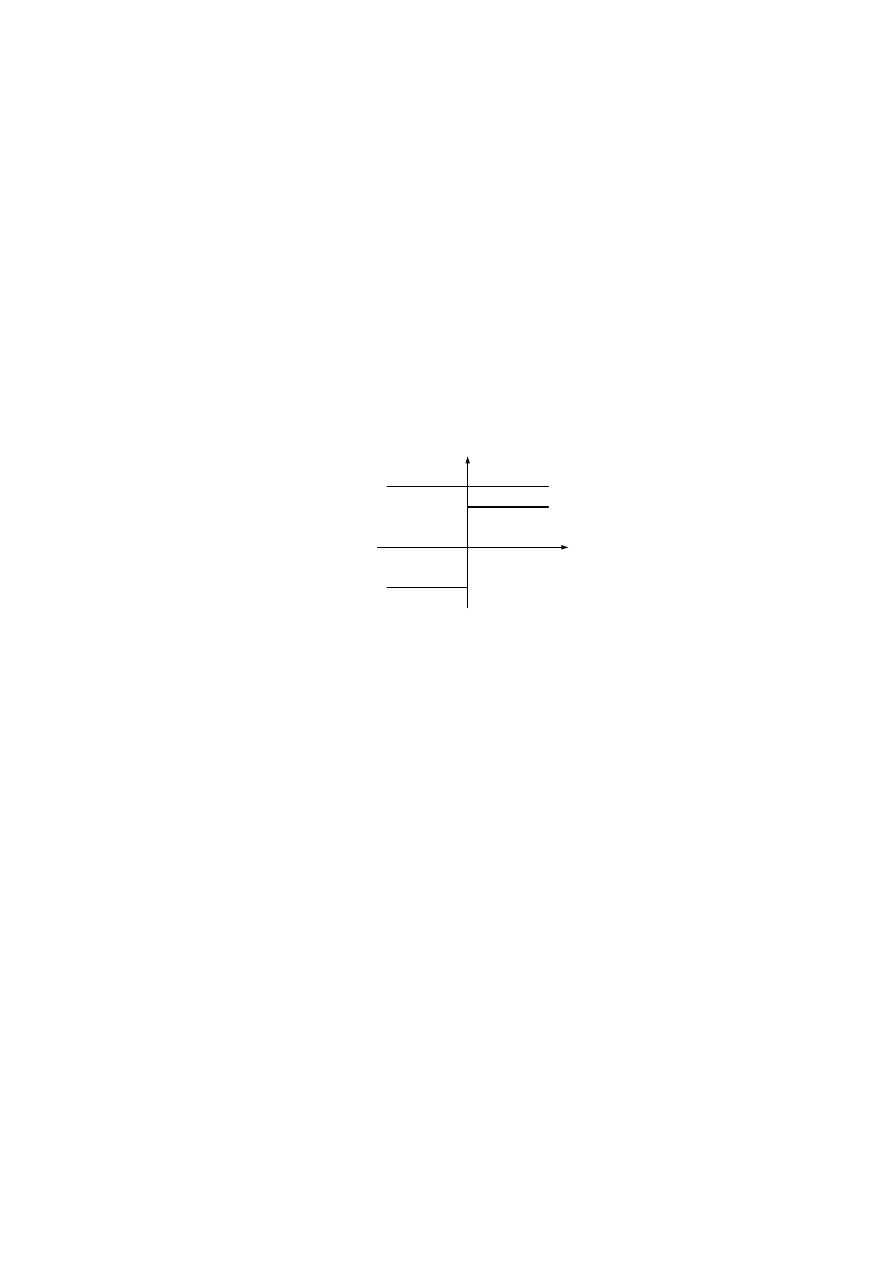
Charakterystyka Mm=f(n) takiego urządzenia na płaszczyźnie przebiega przez ćwiartkę
pierwszą i trzecią, moc bowiem, która jest proporcjonalna do iloczynu momentu oraz
prędkości przy obu kierunkach wirowania jest dodatnia. Moment oporowy reaktywny
wykazuje np. urządzenie jazdy w poziomie mostu suwnicowego; przebieg jego jest pokazany
na rys. 2.2.
2
1
0
n
M
m
Rys. 2.2. Momenty oporowe: reaktywny (1) i aktywny (2)
Charakterystyki mechaniczne przy zmianie napięcia zasilającego maszyny indukcyjnej.
Charakterystyki mechaniczne przy zmianie rezystancji w obwodzie wirnika maszyny indukcyjnej.
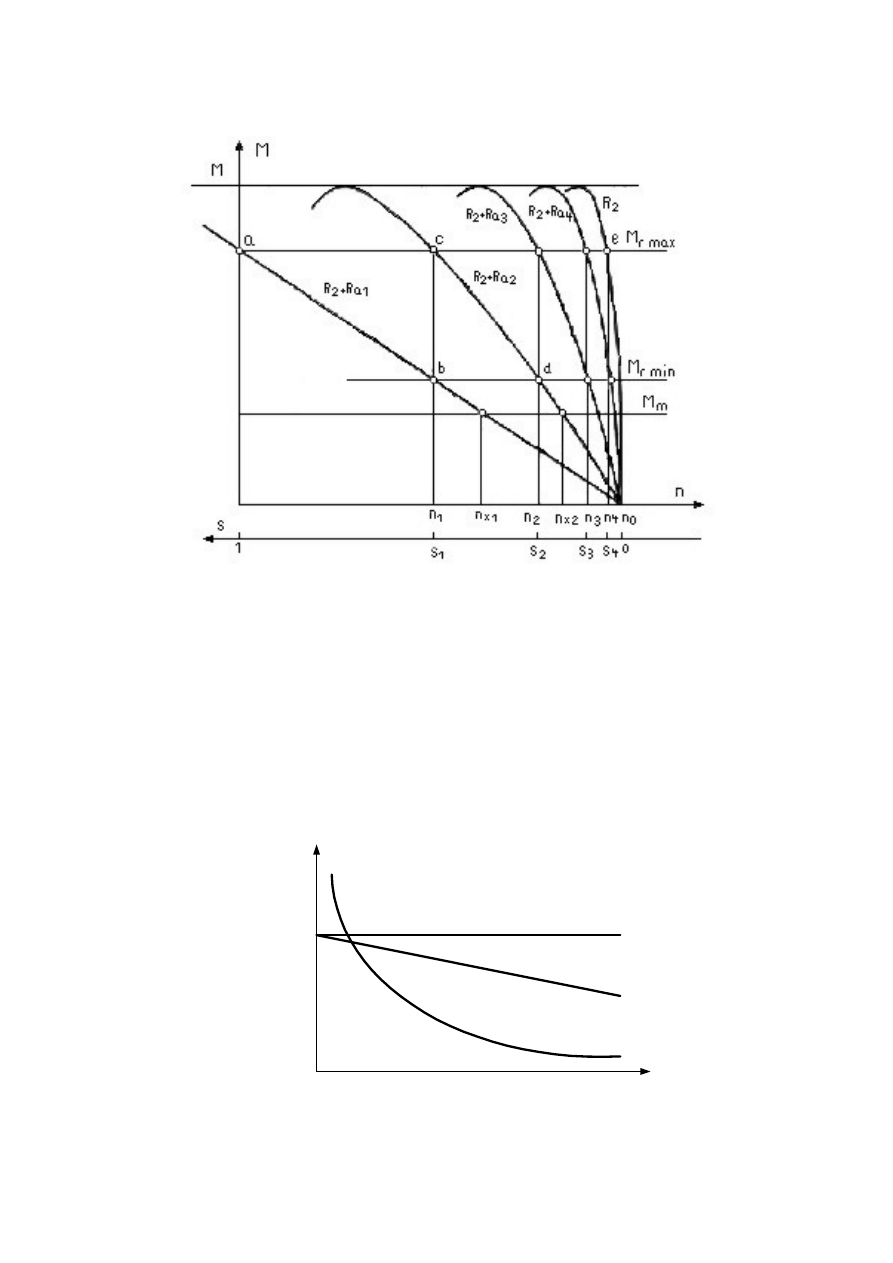
Rys. Charakterystyki rozruchowe trójfazowego silnika asynchronicznego pierścieniowego
Charakterystyka mechaniczna maszyny indukcyjnej i jej charakterystyczne punkty.
Każda charakterystyka mechaniczna silnika ma pewne punkty szczególne, odpowiadające np.
rozruchowi, prędkości idealnego biegu jałowego, stabilności układu.
Znajomość kształtu charakterystyki mechanicznej silnika i jej punktów szczególnych jest
konieczna przy analizie statyki i dynamiki układu elektromechanicznego. Można, zmieniając
elektryczne wielkości zewnętrzne wpływać na kształt charakterystyki mechanicznej, tzn.
można ja odpowiednio formować (kształtować) i wtedy uzyskuje się całą rodzinę
charakterystyk sztucznych, z których się korzysta przy regulacji układu elektromechanicznego.
n
0
M
1
2
3
Rys. 2.3. Charakterystyki mechaniczne silników elektrycznych: 1 – idealnie sztywna, 2 –
sztywna, 3 - podatna
Zasadniczo spotykamy się z trzema rodzajami charakterystyk mechanicznych silników
elektrycznych, a mianowicie: idealnie sztywną, sztywną i podatną (rys. 2.3).
Prędkość obrotowa silnika o charakterystyce mechanicznej idealnie sztywnej jest stała i nie
zależy do wielkości rozwijanego momentu. Taką charakterystykę mają silniki synchroniczne.
Jeżeli ze wzrostem obciążenia prędkość obrotowa silnika maleje nieznacznie, praktycznie
biorąc liniowo i mówimy wtedy, że charakterystyka mechaniczna silnika jest sztywna. Do
grupy tej zaliczmy silniki bocznikowe prądu stałego, silniki asynchroniczne i silniki bocznikowe
komutatorowe prądu przemiennego. Taką charakterystykę nazywamy często bocznikową.
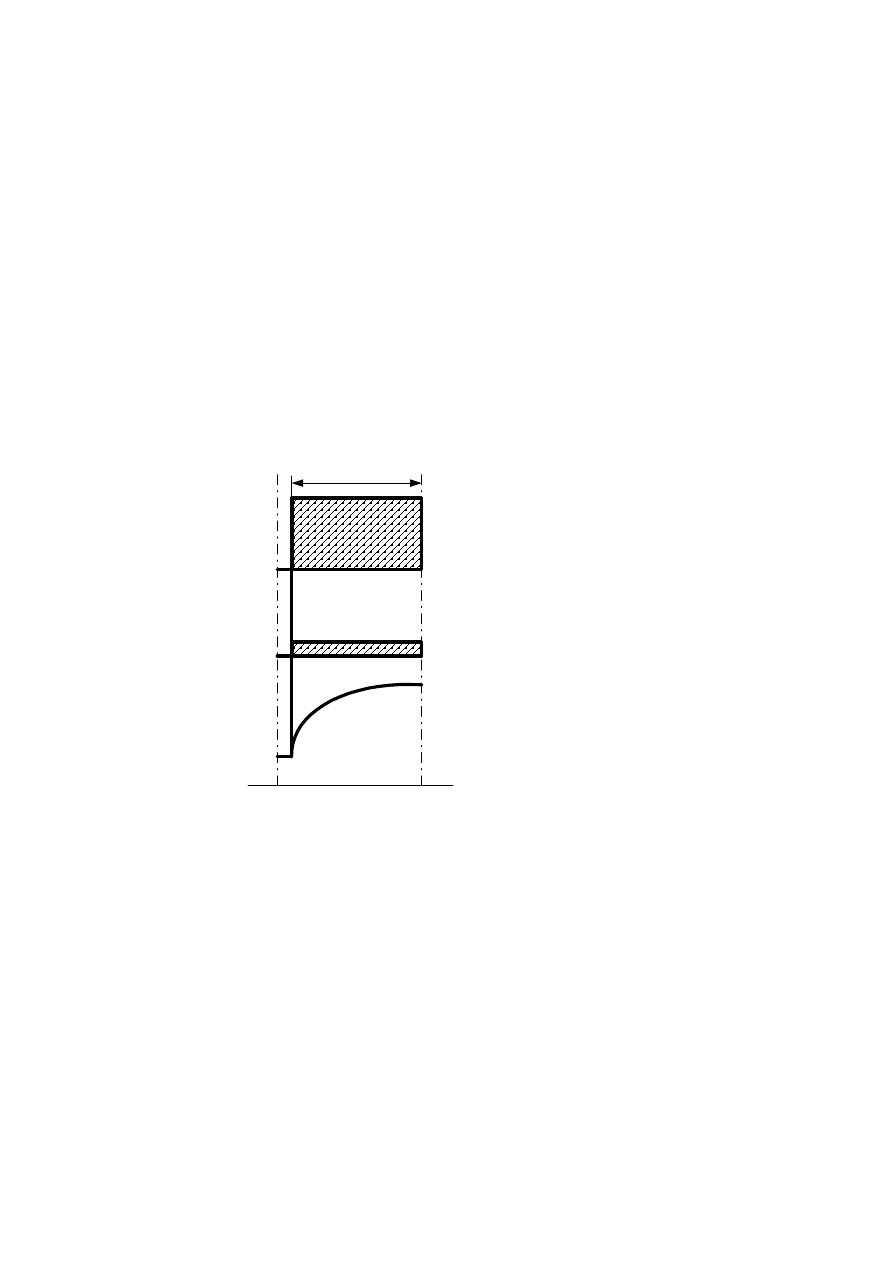
Praca S1.
Jest to praca przy obciążeniu trwającym dowolnie długo. Praca z obciążeniem stałym,
trwającym tak długo aż zostanie osiągnięty stan równowagi cieplnej. Jest ona oznaczana
symbolem S1 ( C ).
t
p
υ
max
Obciążenie
Straty
Temperatura
Czas
Praca ciągła – rodzaj pracy S1, υmax – najwyższa temperatura osiągana przy pracy ciągłej, tp
– czas pracy przy obciążeniu stałym
Praca S2.
Jest to praca przy obciążeniu stałym, trwającym tylko przez stosunkowo czas krótki. Ten czas
jest krótszy, niż czas potrzebny do osiągnięcia równowagi cieplnej.
Po okresie obciążenia następuje dłuższa przerwa (postój), w czasie której silnik stygnie. Na
początku przerwy silnik zostaje odłączony od sieci, tj. następuje okres beznapięciowy, który
trwa dopóty , dopóki silnik nie ostygnie tak, że uzyska temperaturę otoczenia.
Można powiedzieć, że postój, trwa tak długo, aż ustalona temperatura maszyny nie będzie się
różnić o więcej niż 2°C od temperatury czynnika chłodzącego.
Symbolem pracy dorywczej jest S2 (D).Oznaczenie np. S2 60 min.
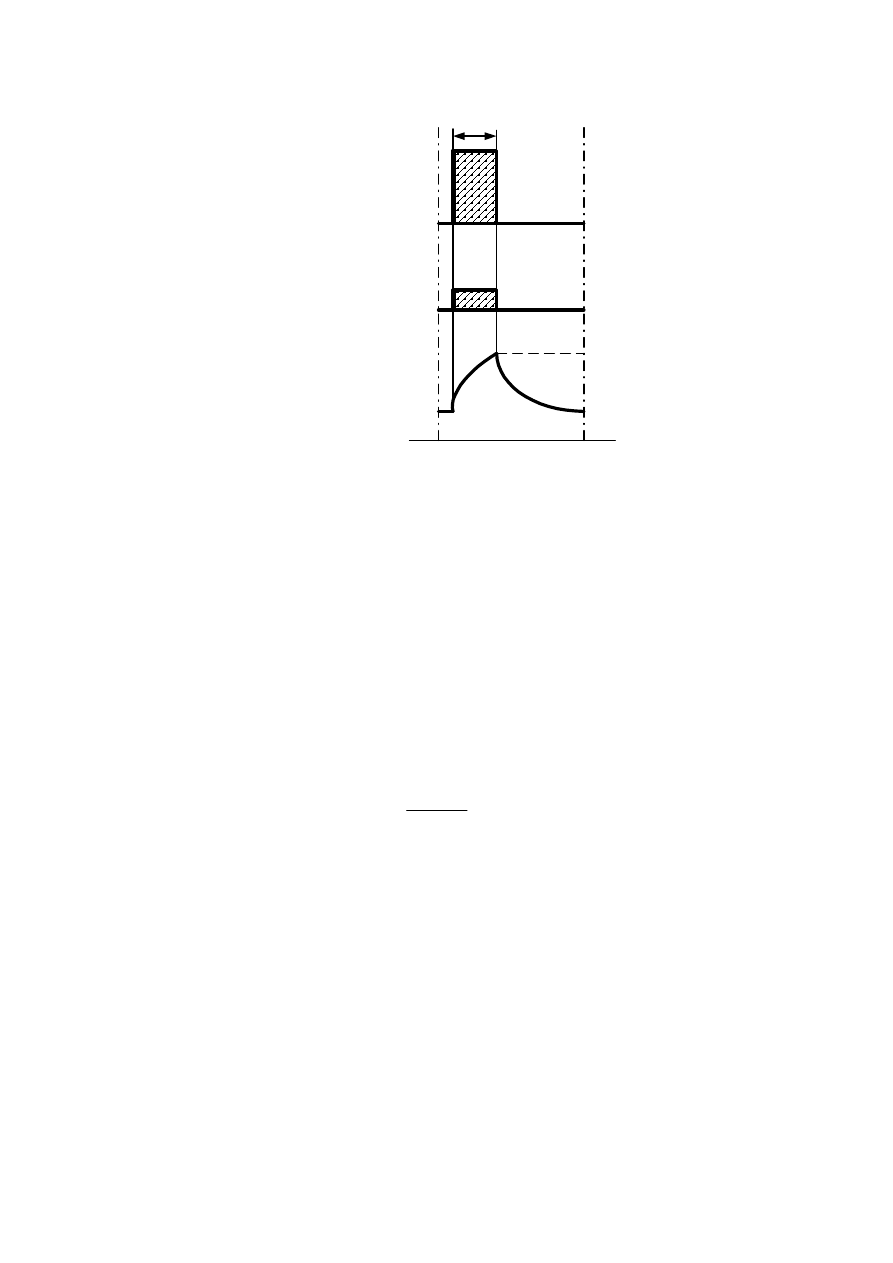
t
p
υ
max
Obciążenie
Straty
Temperatura
Czas
Praca dorywcza – rodzaj pracy S2 (D), υmax – najwyższa temperatura osiągana przy pracy
dorywczej, tD – czas pracy przy obciążeniu stałym. Znormalizowane są czasy pracy dorywczej
S2 (D) x min: X=0,5-1-3-10-30-60-90 minut,
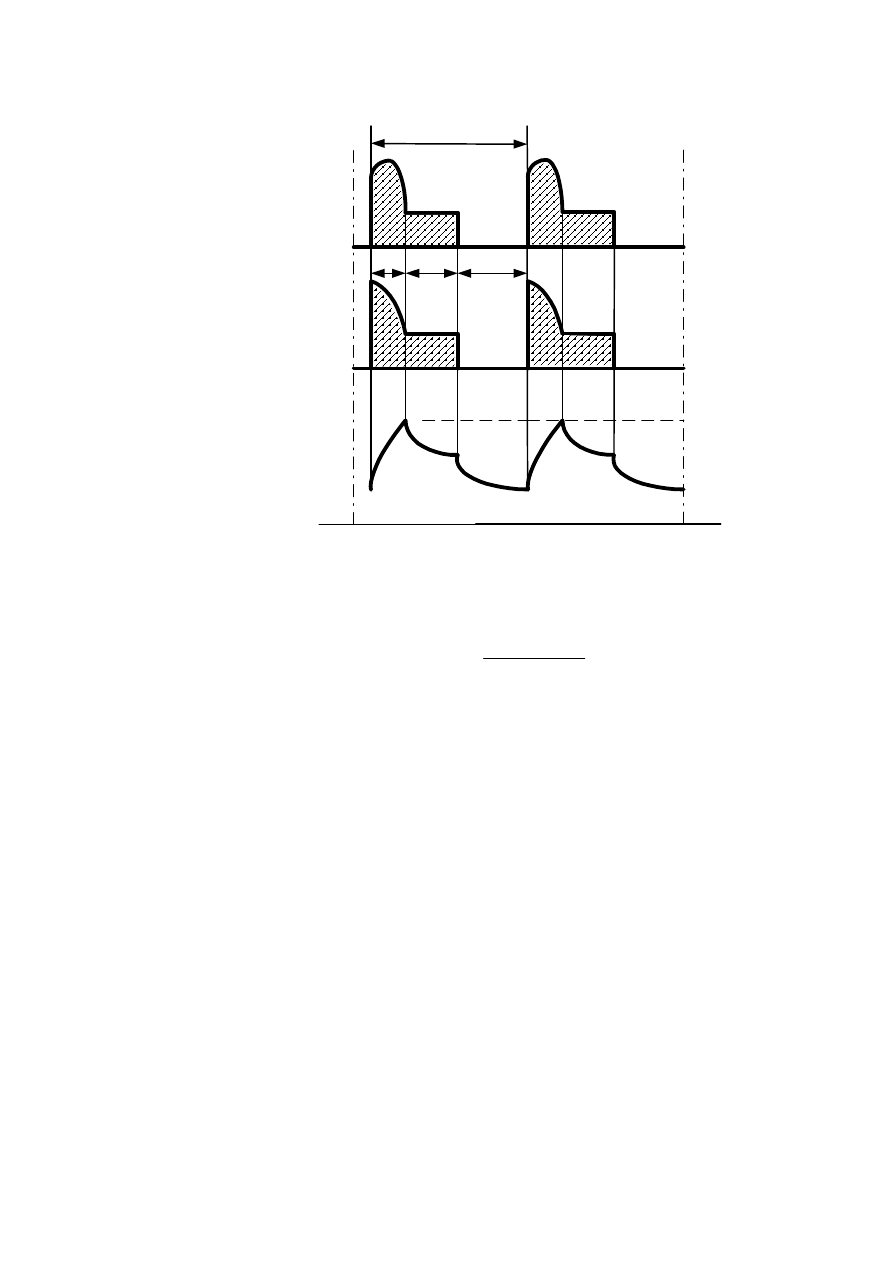
Praca S3.
Trzeci rodzaj pracy to praca przerywana, okresowa, która obejmuje szereg identycznych
okresów pracy. W zależności od tego czy któryś z tych okresów wpływa na nagrzewanie
maszyny podczas rozruchu, bądź w czasie hamowania to rozróżniamy 6 rodzajów prac
przerywanych.
Praca znamionowa przerywana (okresowa) S3 to szereg identycznych okresów pracy, z
których każdy obejmuje czas pracy przy obciążeniu stałym i czas postoju. Przy tym rodzaju
pracy okres jest taki, że prąd rozruchowy nie wpływa w sposób znaczący na nagrzewanie się
maszyny.
Każdy okres obejmuje czas pracy tp przy stałym obciążeniu oraz czas postoju ts .
Jeśli inaczej nie podano, czas trwania okresu wynosi 10 min.
Względnym czasem pracy ( obciążenia) nazywa się stosunek
%
100
t
t
t
s
p
p
⋅⋅⋅⋅
+
+
+
+
i wyraża się go w procentach.
Zarówno czas tp jak i ts nie powinny przy tym wystarczać do osiągnięcia ustalonej
temperatury nagrzania lub też stygnięcia.
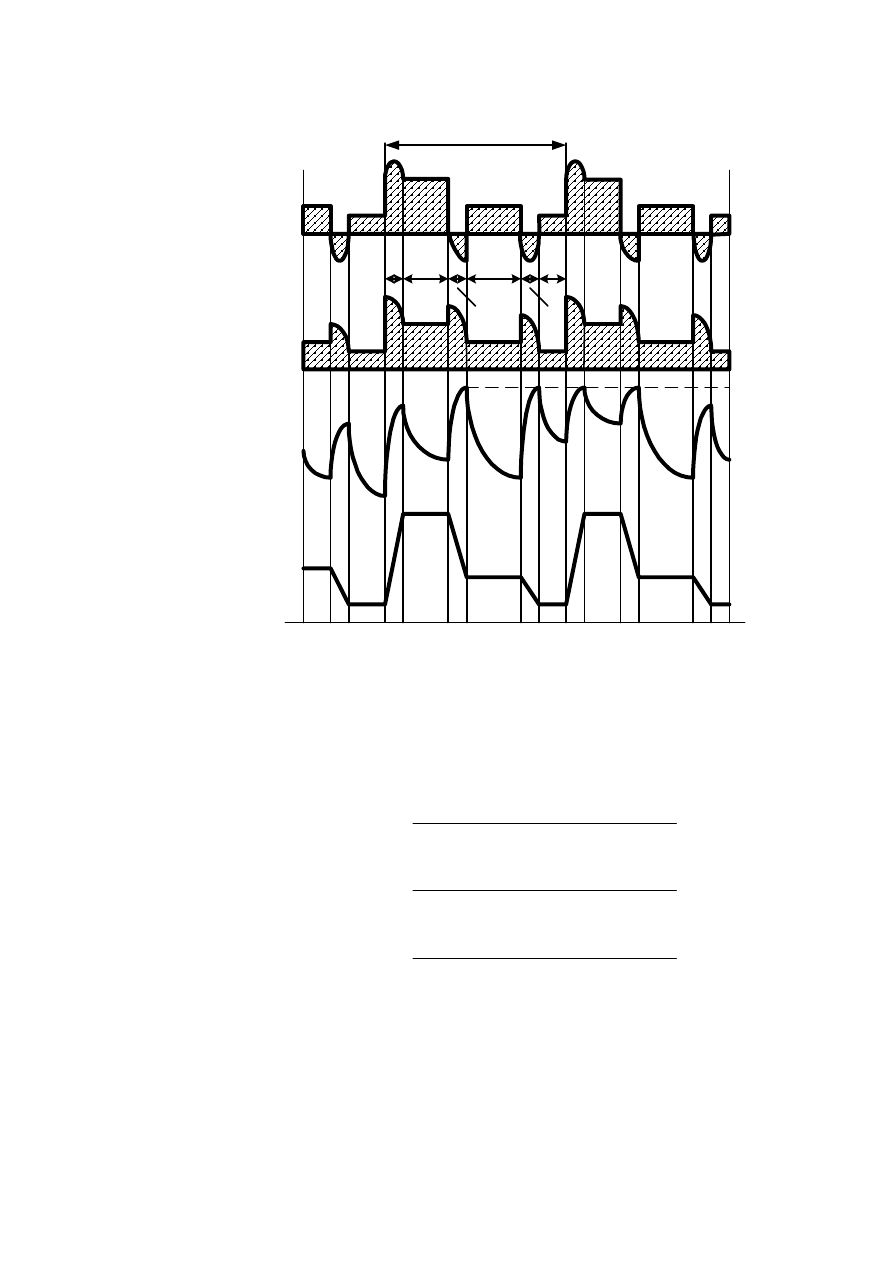
Do czasu tp wliczany jest czas rozruchu i wybiegu silników. Na rys. 4-5 podany jest przebieg
mocy silnika przy pracy przerywanej oraz przebieg występujących w silniku strat mocy.
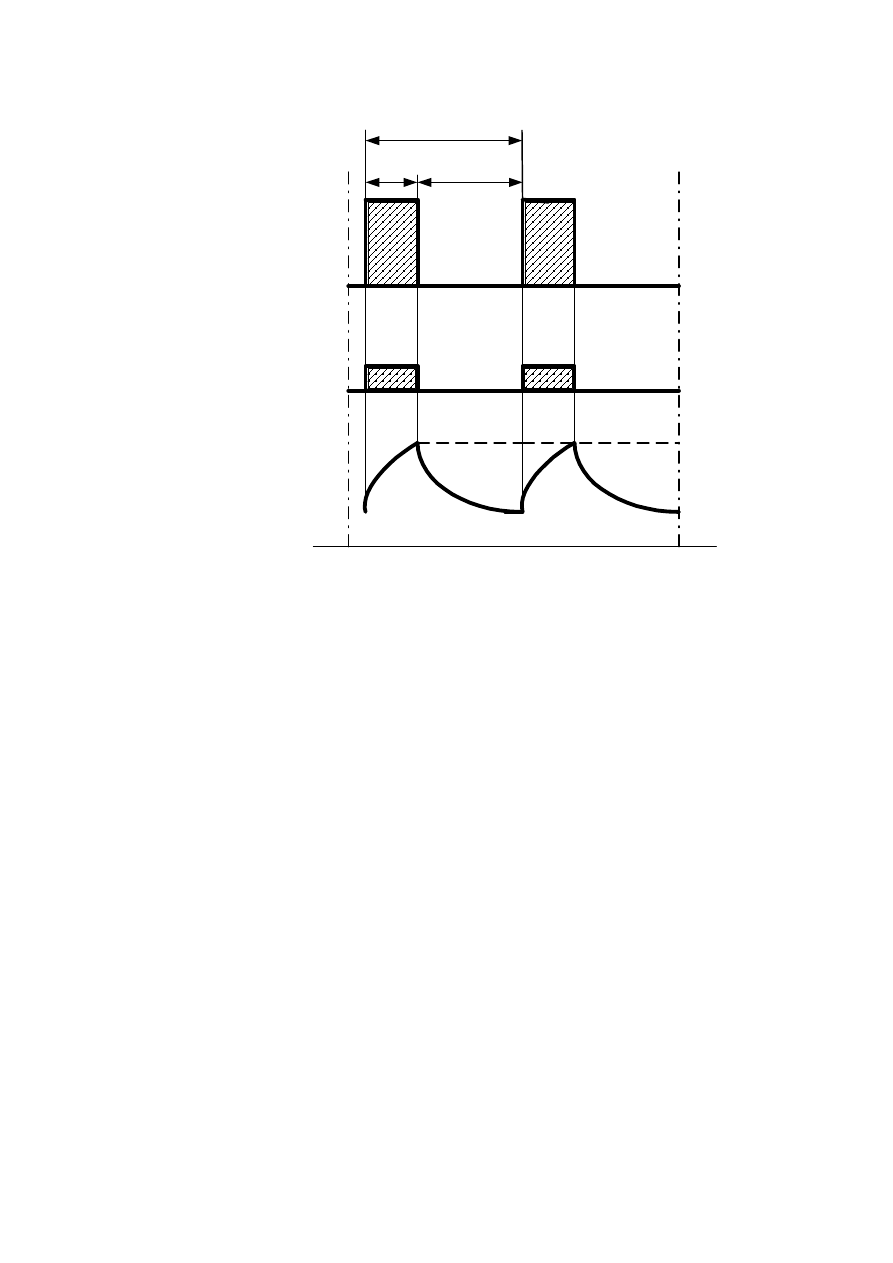
t
p
Obciążenie
Straty
Temperatura
Czas
t
s
υ
max
t
0
Praca okresowa przerywana — rodzaj pracy S3 (P), υmax - najwyższa temperatura osiągana w
okresie pracy,
to — czas trwania okresu, tp — czas pracy przy obciążeniu stałym, ts — czas postoju
W obliczeniach przybliżonych strat mechanicznych i magnetycznych nie uwzględniamy.
Symbol pracy przerywanej to S3 ( P ) i wartość względnego czasu pracy, np. S3 25%.
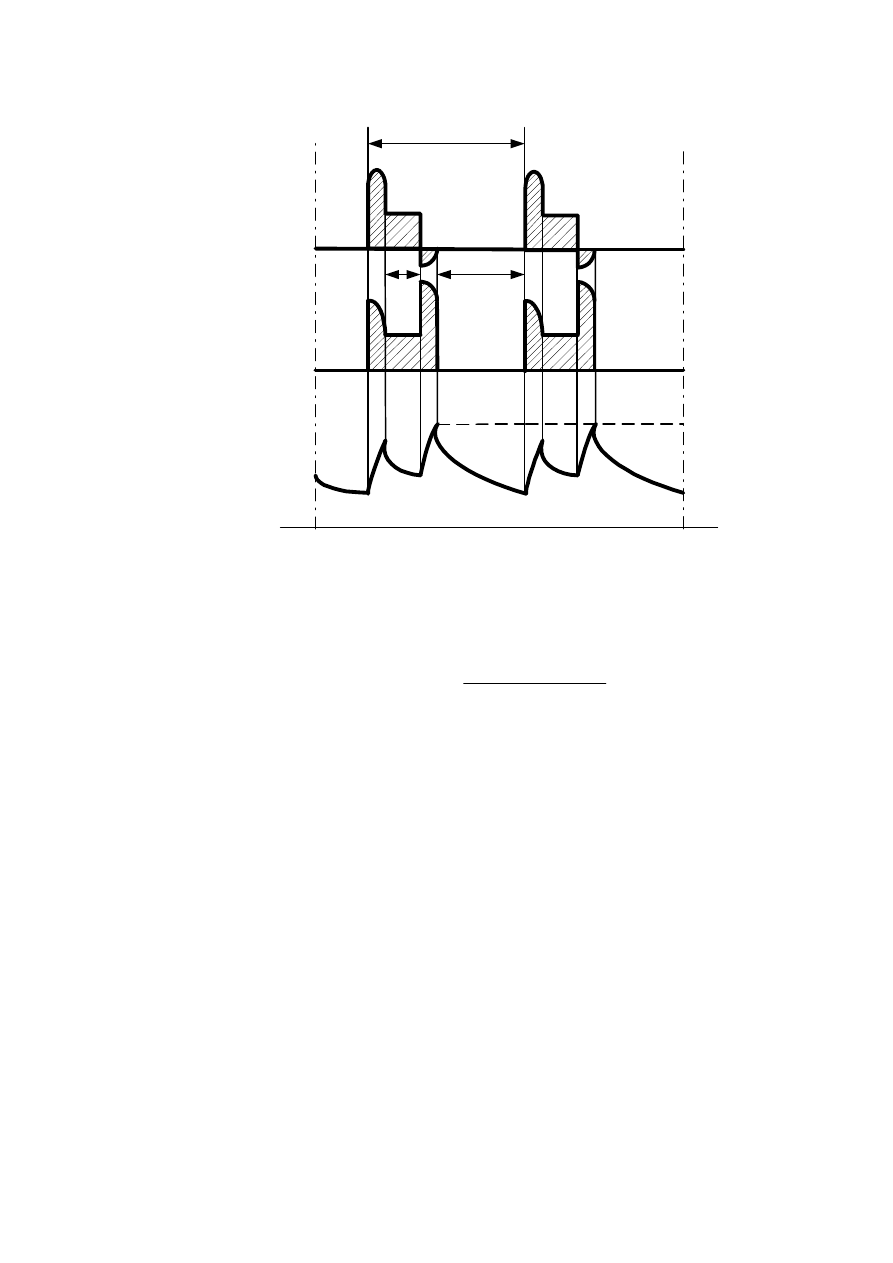
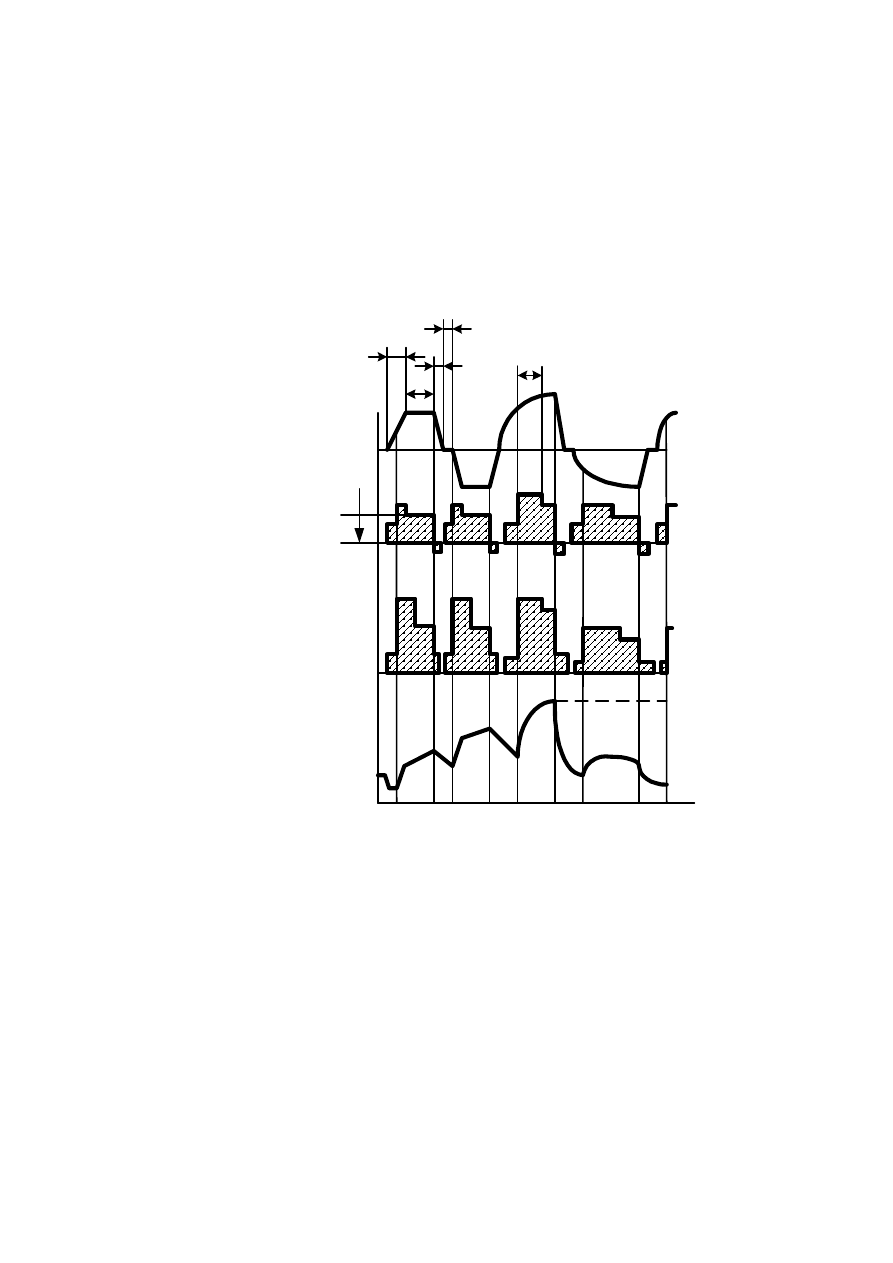
Praca S4.
Praca okresowa przerywana z rozruchem rodzaj pracy S4 (przerywana z dużą liczbą łączeń i
hamowaniem mechanicznym). Szereg identycznych okresów pracy, z których każdy okres
obejmuje znaczący (ze względów cieplnych) czas rozruchu, czas pracy przy obciążeniu stałym
i czas postoju lub jest to praca okresowa, podczas której okres obejmuje czas rozruchu tr,
czas pracy przy stałym obciążeniu tp, czas hamowania mechanicznego i czas postoju. Czasy
pracy i postoju nie wystarczają do osiągnięcia ustalonych przyrostów temperatury. Silnik
zatrzymuje się odłączając go od sieci, po czym następuje naturalny wybieg bądź hamowanie
mechaniczne.
Obciążenie
Straty
Temperatura
Czas
t
r
υ
max
t
0
t
p
t
s
Praca okresowa przerywana z rozruchem – rodzaj pracy S4, υmax - najwyższa temperatura
osiągana w okresie pracy, to — czas trwania okresu, tr – czas rozruchu, tp — czas pracy przy
obciążeniu stałym, ts — czas postoju
Względny czas obciążenia =
%
100
t
t
t
t
t
s
p
r
p
r
⋅⋅⋅⋅
+
+
+
+
+
+
+
+
+
+
+
+
Symbol tego rodzaju pracy S4 (P). Ponadto podaje się względny czas trwania obciążenia,
moment bezwładności silnika (JM) oraz moment bezwładności urządzenia obciążającego
zredukowany do wału silnika (Jext). Podaje się również liczbę łączeń na godzinę
Przykład: S4 25% JM = 0,15 kg • m2 Jext = 0,7 kg • m2 150 c/h
Powyższy przykład oznacza pracę przerywaną dla 150 okresów na godzinę. Stąd czas trwania
okresu wynosi w tym przypadku 3600s /150 =24 sekundy, przy czym czas pracy pod
obciążeniem, łącznie z czasem rozruchu, wynosi 25% całego okresu, czyli 6 sekund.
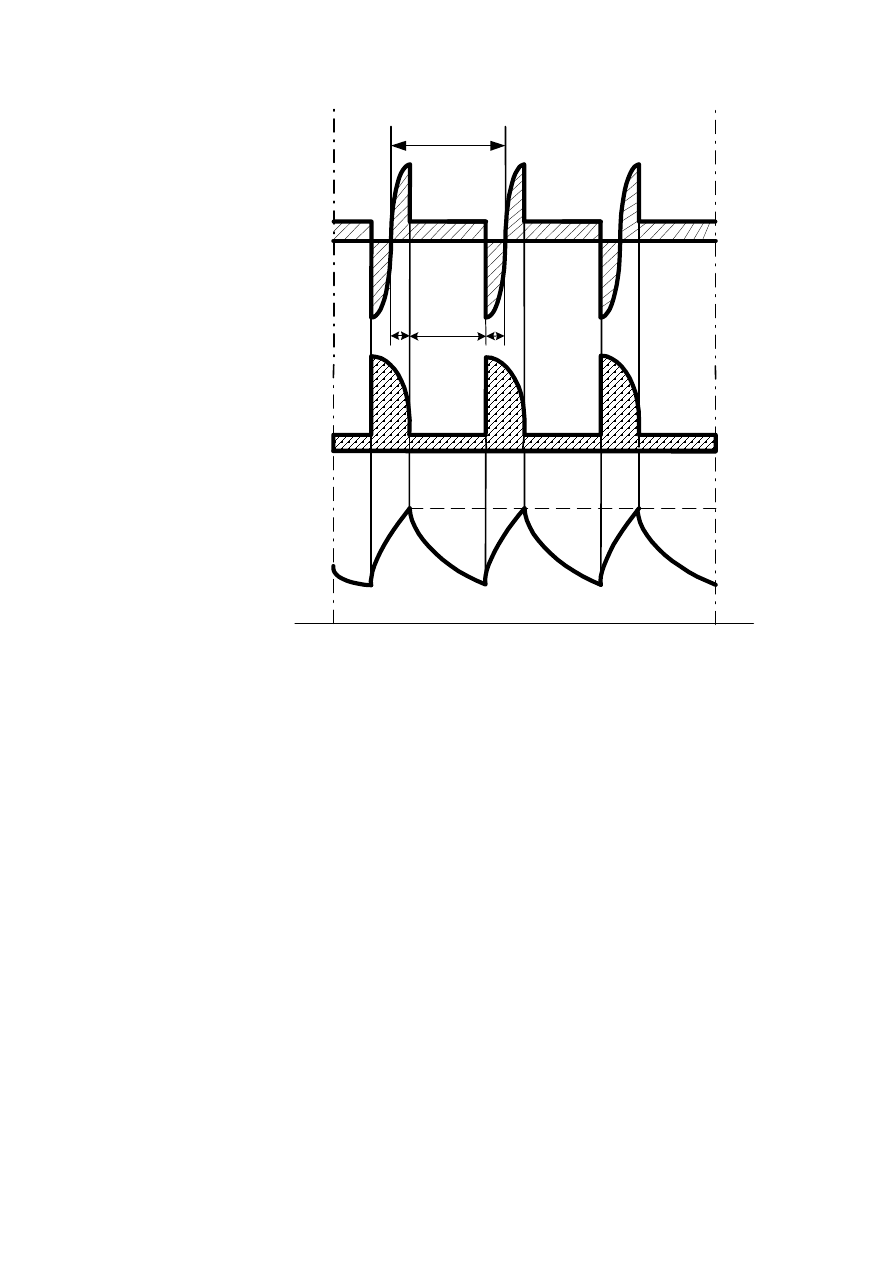
Praca S5.
Praca przerywana z dużą liczba łączeń i hamowaniem elektrycznym rodzaj pracy S5
Szereg identycznych okresów pracy, z których każdy obejmuje czas rozruchu, czas pracy przy
obciążeniu stałym, czas szybkiego hamowania elektrycznego oraz czas postoju.
Ta praca różni się od poprzedniej S4 tym, że zamiast hamowania silnika hamulcem
mechanicznym osadzonym na wale oddzielnie od silnika, rolę hamulca spełnia sam silnik w
odpowiednim połączeniu elektrycznym. W tych przypadkach straty elektryczne i
magnetyczne w silniku mają przebieg inny, pokazany na rys.
Obciążenie
Straty
Temperatura
Czas
υ
max
t
0
t
s
t
r
t
p
t
h
Praca okresowa przerywana z hamowaniem elektrycznym — rodzaj pracy S5, υmax —
najwyższa temperatura osiągana w okresie pracy, to — czas trwania okresu, tr — czas
rozruchu, tp — czas pracy przy obciążeniu stałym, ts— czas postoju, th – czas hamowania,
Względny czas obciążenia =
%
100
t
t
t
t
t
t
t
s
h
p
r
h
p
r
⋅⋅⋅⋅
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Oznaczenie pracy S5 podobnie jak S4
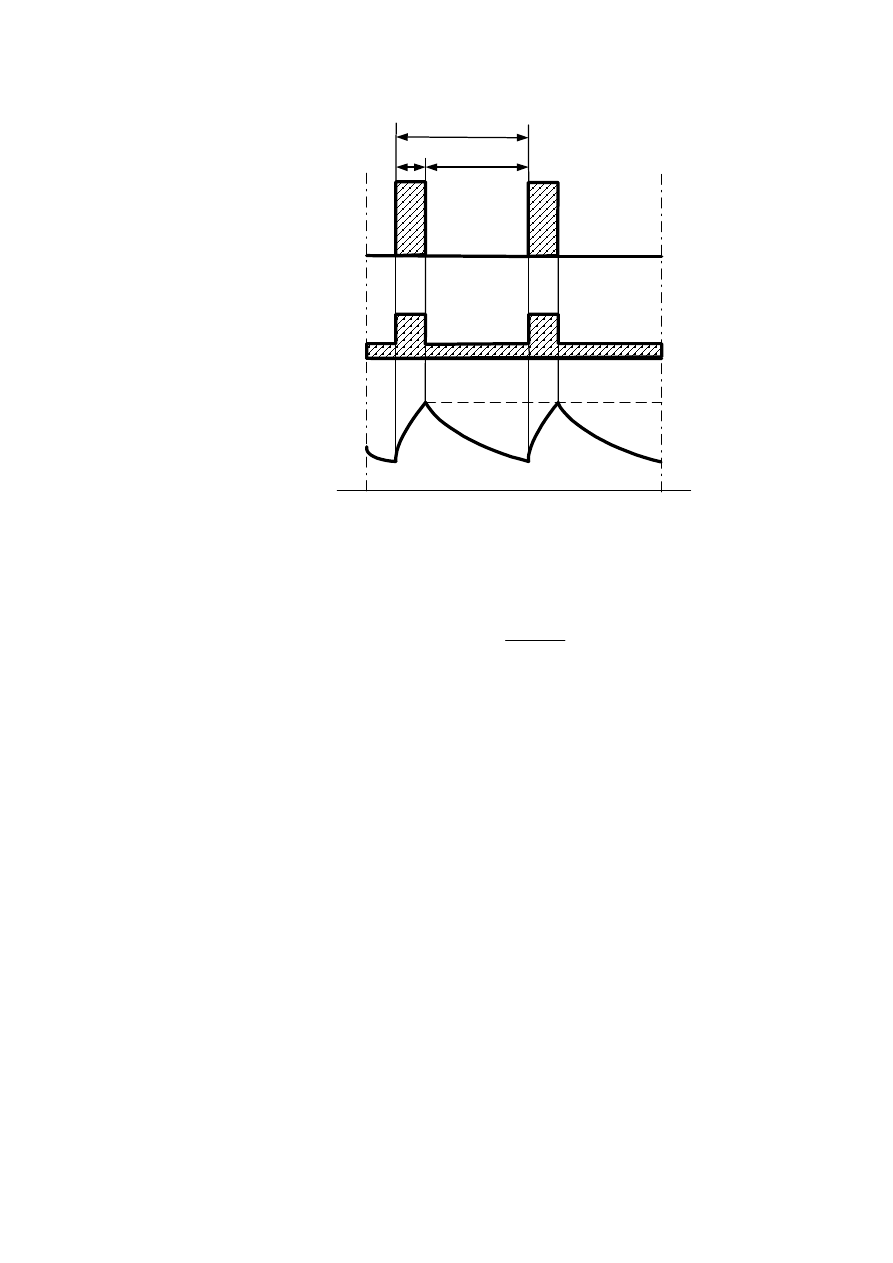
Praca S6.
Praca znamionowa okresowa, przerywana z przerwami jałowymi. Szereg identycznych
okresów pracy, z których każdy obejmuje czas pracy przy obciążeniu stałym i czas pracy przy
biegu jałowym. W tym rodzaju pracy nie występuje czas postoju. Praca ta różni się od pracy
S3 tym, ze po okresie obciążenia tp następuje okres wirowania silnika przy biegu jałowym.
Czas trwania okresu wynosi 10 min. Praca ta trwa dopóty, aż zostanie osiągnięty praktycznie
biorąc ustalony pułap temperatury. Symbol pracy przerywanej z przerwami jałowymi to S6
(PJ) oraz wartość względnego czasu pracy, np. S6 25%. Znormalizowane względne czasy pracy
przerywanej S6 (PJ): 15-25-40-60%. Na rys. podane są przebiegi pracy przerywanej S6 (PJ).
Obciążenie
Straty
Temperatura
Czas
υ
max
t
0
t
p
t
j
Praca okresowa długotrwała z przerwami jałowymi — rodzaj pracy S6, υmax — najwyższa
temperatura osiągana w okresie pracy, to — czas trwania okresu, tp — czas pracy przy
obciążeniu stałym, tj — czas pracy przy biegu jałowym
Względny czas obciążenia =
%
100
t
t
t
j
p
p
⋅⋅⋅⋅
+
+
+
+
Praca S7.
Praca okresowa długotrwała z hamowaniem elektrycznym — rodzaj pracy S7
Szereg identycznych okresów pracy, z których każdy obejmuje czas rozruchu, czas pracy przy
obciążeniu stałym oraz czas hamowania elektrycznego. W tym rodzaju pracy nie występuje
czas postoju.
Obciążenie
Straty
Temperatura
Czas
υ
max
t
0
t
r
t
p
t
h
Praca okresowa długotrwała z hamowaniem elektrycznym — rodzaj pracy S7, υmax —
najwyższa temperatura osiągana w okresie pracy, to — czas trwania okresu, tr — czas
rozruchu, tp — czas pracy przy obciążeniu stałym, th — czas hamowania
Względny czas obciążenia = 1
Dla rodzaju pracy S7, po symbolu S7 podaje się moment bezwładności silnika (JM) oraz
moment bezwładności urządzenia obciążającego zredukowany do wału silnika (Jext). Oraz
liczbę łączeń na godzinę.
Przykład: S7 JM = 0,4 kg • m2 Jext = 7,5 kg • m2 120 c/h
Praca S8.
Praca okresowa długotrwała ze zmianami prędkości obrotowej — rodzaj pracy S8
Szereg identycznych okresów pracy, z których każdy obejmuje czas pracy przy obciążeniu
stałym odpowiadającym określonej uprzednio prędkości obrotowej i z jednego lub kilku
czasów pracy przy innych obciążeniach odpowiadających innym prędkościom obrotowym
(osiąganym np. przez zmianę liczby biegunów w przypadku silników indukcyjnych). W tym
rodzaju pracy nie występuje czas postoju.
t
0
t
r
t
p1
t
p2
t
p3
t
h1
t
h2
Obciążenie
Straty
Temperatura
Prędkość
obrotowa
υ
max
Czas
Praca okresowa długotrwała ze zmianami prędkości obrotowej — rodzaj pracy S8, υmax —
najwyższa temperatura osiągana w okresie pracy, to — czas trwania okresu, tr, — czas
rozruchu, tp1, tp2, tp3 — czasy pracy przy obciążeniu odpowiadającym różnym stałym
prędkościom obrotowym, th1, th2 - czasy hamowania.
Względne czasy obciążenia
⋅⋅⋅⋅
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
⋅⋅⋅⋅
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
⋅⋅⋅⋅
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
%
100
t
t
t
t
t
t
t
t
%
100
t
t
t
t
t
t
t
t
%
100
t
t
t
t
t
t
t
t
3
p
2
h
2
p
1
h
1
p
r
3
p
2
h
3
p
2
h
2
p
1
h
1
p
r
2
p
1
h
3
p
2
h
2
p
1
h
1
p
r
1
p
r
Dla rodzaju pracy S8, po symbolu S8 podaje się moment bezwładności silnika (JM), moment
bezwładności urządzenia obciążającego zredukowany do wału silnika (Jext) oraz obciążenie,
prędkość obrotową i względny czas trwania obciążenia dla wszystkich prędkości obrotowych.
Przykład: S8 JM = 0,5 kg • m2 Jext = 6 kg • m2
40 kW 1460 obr/min 30%.
25 kW 980 obr/min 40%.
16 kW 740obr/min 30%.
Praca S9.
Praca z nieokresowymi zmianami obciążenia i prędkości obrotowej (praca nieokresowa) —
rodzaj pracy S9
Praca, przy której na ogół obciążenie i prędkość obrotowa zmieniają się nieokresowo w
dopuszczalnym zakresie. Praca ta obejmuje często przeciążenia, które mogą przekraczać
znacznie pełne obciążenie.
t
r
t
p
t
h
t
s
S
C
p
υ
max
Prędkość
obrotowa
Czas
Temperatura
Straty
Obciążenie
Praca z nieokresowymi zmianami obciążenia i prędkości obrotowej (praca nieokresowa) —
rodzaj pracy S9, υmax — najwyższa osiągana temperatura, tr — czas rozruchu, tp — czas
pracy przy zmiennym obciążeniu,
th— czas hamowania, ts — czas postoju, S — praca przy przeciążeniu, Cp — pełne obciążenie
Krzywa nagrzewania i równania dla pracy S1, S2.
0
∆υ
∆υ
g
T
υ
t
t
d
∆υ
g
'
A
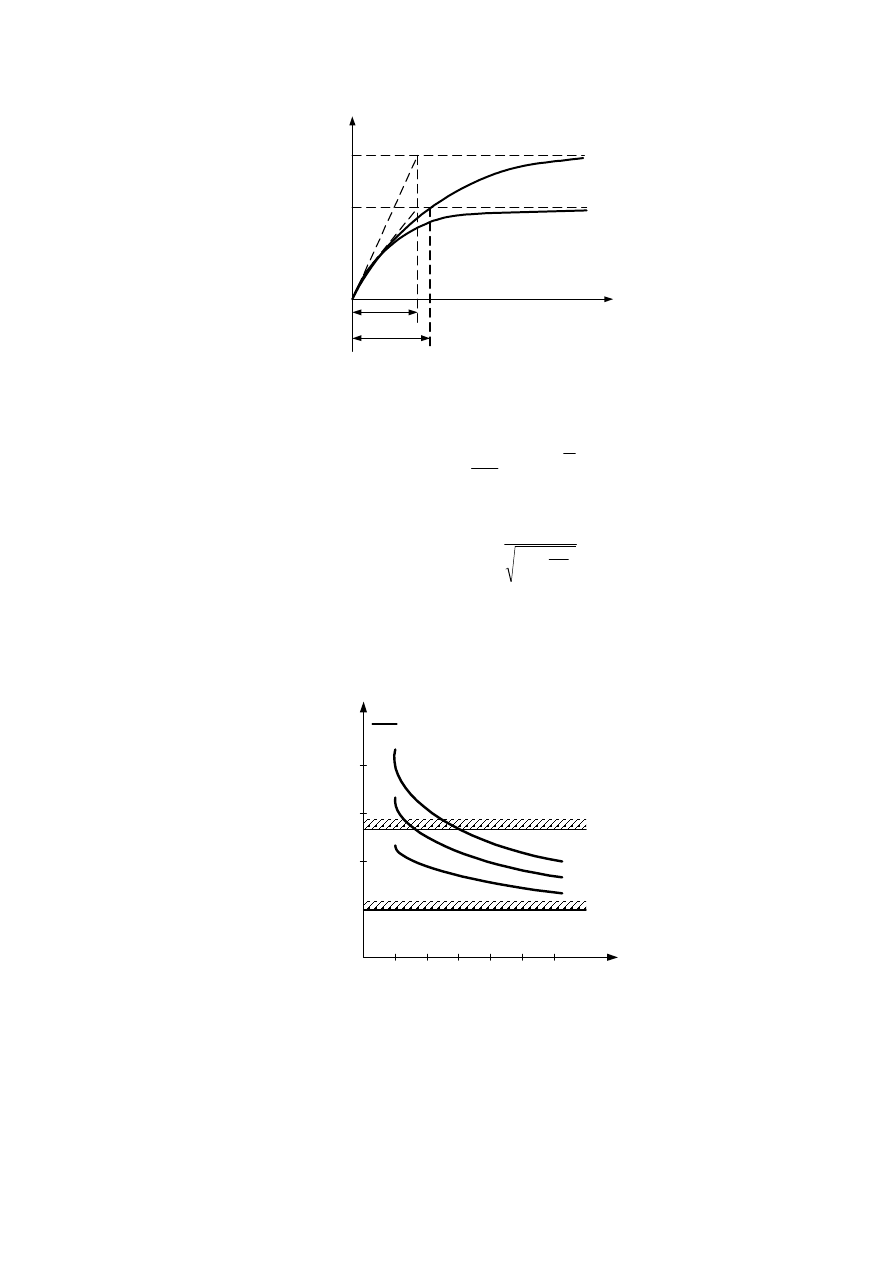
Rys. 4-10. Wyznaczenie czasu pracy dorywczej t
D
silnika obciążonego stałym momentem przy
stałej prędkości obrotowej i nie zmieniających się warunkach chłodzenia
otrzymamy:
−
∆
=
∆
−
ϑ
ϑ
ϑ
T
t
S
S
g
g
D
e
P
P
1
2
1
2
skąd
ϑ
−
−
=
T
d
t
1
S
2
S
e
1
P
P
Za pomocą tego wzoru możemy obliczyć moc danego silnika przy pracy dorywczej, jeśli
znane są moc silnika przy pracy ciągłej i termiczna stała czasowa T
.
Ze wzoru ( 4.5 ) wynika, że im większa jest termiczna stała czasowa silnika, tym większa
też może być moc do pracy dorywczej.
0
1
2
3
4
15
30
45
60
75
90
P
s2
P
s1
P
gr
T
υ
=5h
T
υ
=3h
T
υ
=1h
t
Rys. 4-11. Zależność stosunku dopuszczalnej mocy dorywczej P
S2
do mocy ciągłej P
S1
silnika od
czasu pracy przy różnych termicznych stałych czasowych
Rodzaje strat w silniku i od czego zależą.
Ogólne straty w silniku elektrycznym składają się ze strat w uzwojeniach ΔPuzw , strat w
obwodzie magnetycznym ΔPFe , strat mechanicznych ΔPm ,strat przejścia pod szczotkami
ΔPpsz oraz strat dodatkowych ΔPdod :

dod
psz
m
Fe
uzw
P
P
P
P
P
P
∆
+
∆
+
∆
+
∆
+
∆
=
∆
∑
Poszczególne straty są zależne od różnych parametrów toteż można je przedstawić
następująco:
const
I
P
const
n
P
const
n
P
P
P
P
const
f
B
P
const
I
P
psz
3
went
tarcia
went
tarcia
m
3
,
1
2
Fe
2
uzw
⋅
≈
∆
⋅
=
∆
⋅
=
∆
∆
+
∆
=
∆
⋅
=
∆
⋅
=
∆
Straty dodatkowe ΔPdod wg norm polskich wynoszą w maszynach prądu stałego bez
kompensacji 1%, z kompensacją 0,5%, a w maszynach asynchronicznych również 0,5% mocy
znamionowej.
Rozruch silnika trójfazowego.
Rozruchem nazywamy stan pracy od chwili załączenia napięcia do osiągnięcia przez maszynę
ustalonej prędkości, określonej parametrami zasilania (napięciem i częstotliwością) i
obciążenia
(momentem
hamującym).
Rozruch silnika jest możliwy tylko wtedy, gdy istnieje nadwyżka momentu wytworzonego
przez silnik M nad momentem obciążenia Mh. Przy rozpatrywaniu jakości rozruchu bardzo
istotna jest wartość prądu pobieranego z sieci w czasie rozruchu - prąd ten nazywa się
prądem rozruchowym Ir , oraz wartość momentu rozwijanego przez silnik w chwili rozruchu -
moment ten nazywa się momentem rozruchowym Mr (lub momentem początkowym}.
Istotny jest również czas trwania rozruchu. Prąd pobierany podczas rozruchu ze zwartym
uzwojeniem wirnika jest kilkukrotnie większy od prądu znamionowego (Ir = 4 ÷ 10IN).
Dlatego też w zależności od rozwiązania konstrukcyjnego stosuje się często różne metody
rozruchu silników, które mają na celu ograniczenie wartości lub czasu działania prądu
rozruchu. Stosuje się na przykład obniżanie napięcia zasilania (rozruch przy użyciu
autotransformatora), zmianę konfiguracji uzwojeń (przełącznik gwiazda-trójkąt), itp. W
silnikach pierścieniowych załączenie dodatkowej rezystancji w obwód wirnika powoduje
znaczne zwiększenie początkowego momentu obrotowego kosztem większego poślizgu i strat
mocy. W silnikach synchronicznych wirnik musi najpierw zostać rozpędzony do prędkości
bliskiej synchronicznej (np. przy użyciu silnika asynchronicznego), po czym może zostać
włączone zasilanie silnika synchronicznego, który normalnie posiada praktycznie zerowy
moment startowy.
Początkowe chwile stanu rozruchu (bezpośrednio po włączeniu zasilania) są często
równoznaczne z pracą w stan zwarcia silnika. Dlatego też czasem stosuje się specjalne
konstrukcje silników ze zwiększoną szczeliną powietrzną, które są niewrażliwe na stany
zwarcia.
Udowodnić, że wzór jest poprawny dla Y/D P=sqrt(3)UpIpcos(fi) // P=3UfIfcos(fi)
ϕ
Cos
I
U
P
p
p
3
=
ϕ
Cos
I
U
P
f
f
3
=
ponieważ
f
p
f
p
f
p
f
p
U
U
U
U
I
I
I
I
trójkąr
D
gwiazda
Y
=
=
=
=
3
3
)
(
)
(
Wyszukiwarka
Podobne podstrony:
eut gotowce EUT1
Wyklad 1, Semestr VII, EUT, Eksploatacja układów technicznych, Wykłady, materialy od zielinskiej, Zi
eut gotowce, EUT zal
eut gotowce EUT3
eut gotowce EUT2
sciaga eut
eut gotowce EUT4
Wyklad 2, Semestr VII, EUT, Eksploatacja układów technicznych, Wykłady, materialy od zielinskiej, Zi
Wyklad 4 2, semestr VIII, Semestr VIII, EUT, eut, Nowy folder, Wyklad 4
eut gotowce Sprawozdanie EUT
eut gotowce ~$T zadania
eut gotowce EUT zadania
eut
więcej podobnych podstron