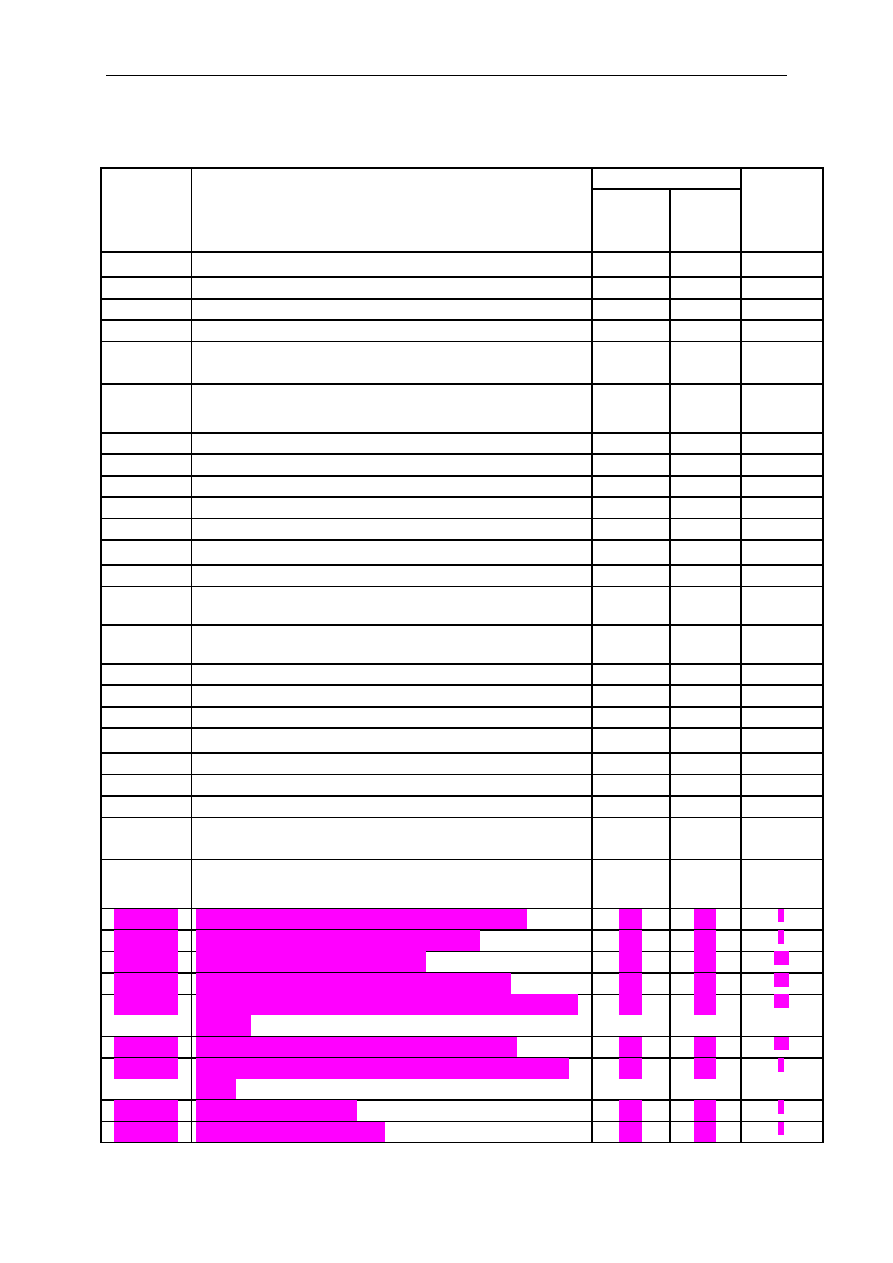
Podstawy Robotyki
Wykłady 2011
Wykład
Nr/Data
Zagadnienie
Plik
Szacunko-
wa liczba
godzin
Materiał dla
studentów
PR ETI W
Prezentacja
PR ETI P
Wprowadzenie – 2 godz.
1/14.02
Organizacja przedmiotu
0
0
0,25
1/14.02
Robotyka w XXI wieku
0
0
0,75
1/14.02
Rys historyczny rozwoju robotyki i sytuacja obecna
0
0
0,5
1/14.02
Zakres i problematyka badawcza robotyki. Prawa ro-
botyki
0
0
0,5
Roboty przemysłowe jako narzędzia – 4
godz.
2/21.03
Interpretacja systemowa różnych form pracy ludzkiej
1.1
1.1
1
2/21.03
Przyczyny rozwoju robotów
1.2
1.2
1
3/28.03
Etapy rozwoju robotów przemysłowych
1.2
1.2
1
3/28.03
Definicje i klasyfikacja robotów przemysłowych
1.3
1.3
0,5
3/28.03
Wstęp do teorii maszyn i mechanizmów
1.4
1.4
0,5
Budowa robotów przemysłowych – 4 godz.
4/07.03
Podstawowe zespoły i układy robotów przemysłowych
3.1
3.1
1
4/07.03
Roboty monolityczne o szeregowej strukturze kinema-
tycznej
3.2
3.2
1
5/14.03
Roboty o budowie modułowej i szeregowej strukturze
kinematycznej
3.3
3.3
1
5/14.03
Roboty i manipulatory o strukturach równoległych
3.4
3.4
0,5
5/14.03
Roboty i manipulatory o strukturach hybrydowych
3.5
3.5
0,5
Konstrukcja mechaniczna manipulatora
3.8
3.8
Dodatek
Napędy robotów przemysłowych – 2 godz.
6/21.03
Napędy hydrauliczne
4
4
0,67
6/21.03
Napędy pneumatyczne
4
4
0,33
6/21.03
Napędy elektryczne
4
4
0,67
6/21.03
Mechanizmy przekazywania ruchu stosowane w ro-
botach
4
4
0,33
Kinematyka i dynamika manipulatorów –
9 godz.
10/18.04 Wprowadzenie do kinematyki manipulatorów
5.1
5.1
1
10/18.04 Elementy składowe i struktura robotów
5.2
5.2
1
11/09.05 Ogólna klasyfikacja kinematyki
5.2
5.2
0,5
11/09.05 Zagadnienia kinematyki prostej i odwrotnej
5.2
5.2
0,5
11/09.05 Pozostałe kwestie związane ze sterowaniem manipu-
latorem
5.2
5.2
0,5
11/09.05 Ruchy sztywne i przekształcenie jednorodne
5.2
5.2
0,5
12/16.05 Kinematyka prosta: reprezentacja Denavita-Harten-
berga
5.2
5.2
1
12/16.05 Kinematyka odwrotna
5.2
5.2
1
13/23.05 Dynamika manipulatorów
5.3
5.3
2
1
14/30.05
2
Urządzenia chwytające i głowice technolo-
giczne robotów przemysłowych – 1 godz.
7/28.03
Przeznaczenie i ogólna charakterystyka chwytaków
7
7
0,33
7/28.03
Budowa
7
7
0,33
7/28.03
Przykłady chwytaków i narzędzi
7
7
0,34
7/28.03
Przykłady filmowe
7
7
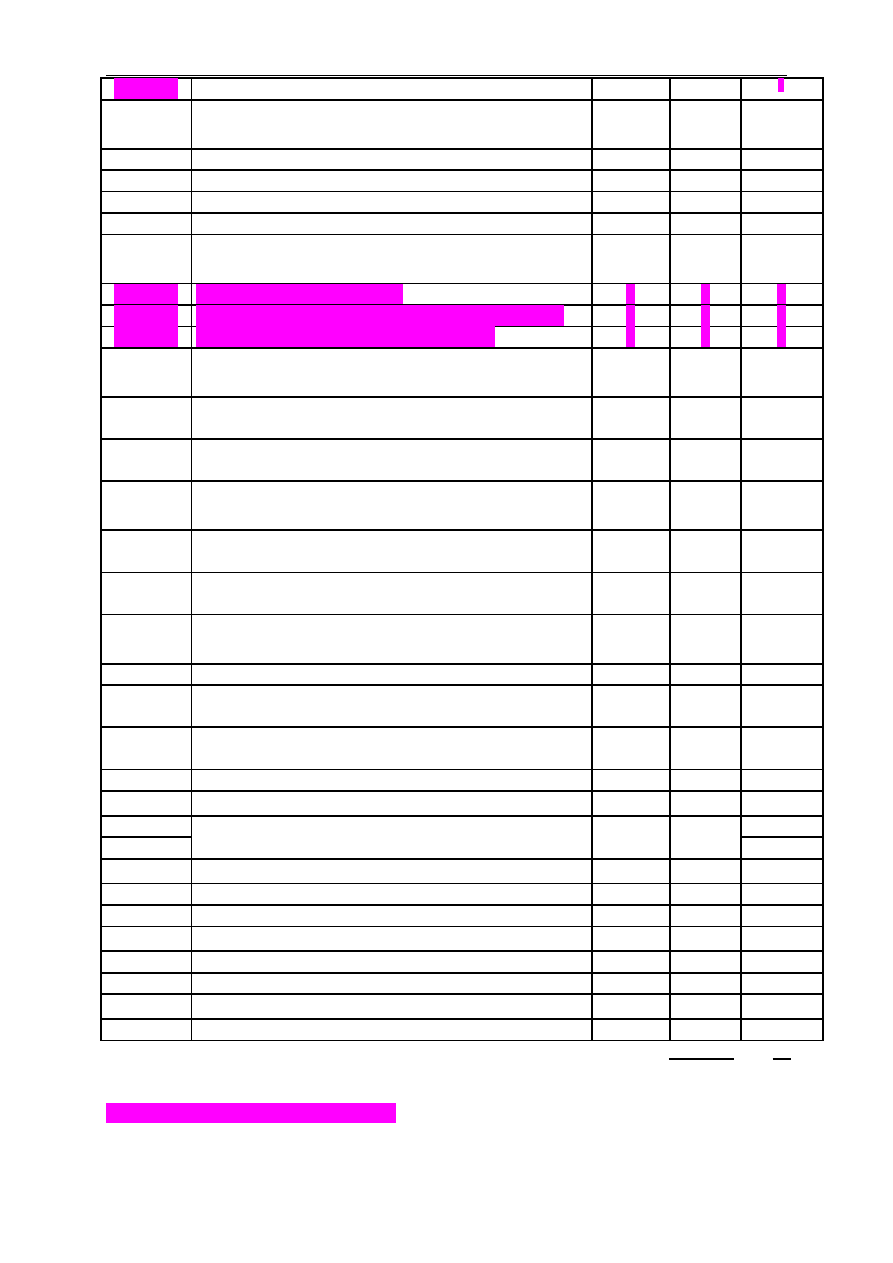
Sterowanie i programowanie robotów – 3
godz.
15/06.06 Zadania układów sterowania
8
8
1
15/06.06 Układy sterowania numerycznego komputerowego
8
8
1
15/06.06 Programowanie robotów przez nauczanie
8
8
1
Niektóre aspekty wprowadzania robotów
przemysłowych do przemysłu – 1 godz.
7/28.03
Aspekty organizacyjno - techniczne przedsięwzięcia
robotyzacyjnego
9
9
0,5
7/28.03
Aspekty ekonomiczne przedsięwzięcia robotyzacyj-
nego
9
9
0,5
Charakterystyki robotów przemysłowych i
ich badanie - 0,5 godz.
8/04.04
Przemieszczenia, dokładności i powtarzalność pozy-
cjonowania
11
11
0,25
8/04.04
Wytrzymałość i odporność na narażenia środowisko-
we -Badania kontrolne u producenta
11
11
0,25
Bezpieczeństwo na zrobotyzowanych stano-
wiskach pracy – 1 godz.
8/04.04
Zagrożenie na zrobotyzowanych stanowiskach pracy
13.1
13.1
0,25
8/04.04
Przyczyny wypadków podczas pracy w systemach
zrobotyzowanych
13.1
13.1
0,25
8/04.04
Ogólne zasady bezpiecznej integracji robota z syste-
mem
13.1
13.1
0,25
8/04.04
Metody zabezpieczania systemów zrobotyzowanych
13.1
13.1
0,25
8/04.04
Mikrorobotyka – 1
Mikrorobotyka – 1 godz.
8/04.04
Roboty w skali mikro
14.13.1
14.13.1
0,5
9/11.04
0,5
Zasilanie robotów - 0,5 godz.
9/11.04
Ogniwa regenerowane
21.1
21.1
0,25
9/11.04
Ogniwa nieregenerowane
21.1.
21.1
0,25
Sztuczne mięśnie - 0,5 godz.
9/11.04
Stopy z pamięcią kształtu
22.1
22.1
0,25
9/11.04
Zastosowanie SMA w robotyce
-
22.2
0,25
Perspektywy rozwoju robotów – 0,5 godz.
9/11.04
Perspektywy – na zakończenie
-
25.1
0,5
Razem
(f)
30
W1-W9 – prof. dr hab. inż. Andrzej Grono
W10-W15 – dr inż. Mariusz Dąbkowski
2
Document Outline
- Plik
- Sterowanie i programowanie robotów – 3 godz.
- Charakterystyki robotów przemysłowych i ich badanie - 0,5 godz.
- Bezpieczeństwo na zrobotyzowanych stanowiskach pracy – 1 godz.
- Zagrożenie na zrobotyzowanych stanowiskach pracy
- Przyczyny wypadków podczas pracy w systemach zrobotyzowanych
- Ogólne zasady bezpiecznej integracji robota z systemem
- Metody zabezpieczania systemów zrobotyzowanych
- Zasilanie robotów - 0,5 godz.
- Sztuczne mięśnie - 0,5 godz.
- Razem (f)
Wyszukiwarka
Podobne podstrony:
Program PUE 2011 i 2012 Dyplomacja Europejska niestacjonarne, Dyplomaca Europejska
program PG 2011 stacj, notatki, testy, Prawo gospodarcze, PRAWO, mail 2, Prawo gospodarcze
hjp program zajec 2011-2012, Wiedza o historycznym rozwoju języka polskiego
Treści programowe TiORB 2011 2012
programowanie st7 2011 03 14 id Nieznany
Program Konwergencji 2011 dla PL
KI program cwiczen 2011-12 nowy, Politologia UMCS - materiały, III Semestr zimowy, Komunikacja Inter
nowa podstawa programowa praktyka 2011
ANDRAGOGIKA program ćwiczeń 2011 12
Podstawy socjologii, program ćwiczeń 2011-2012
PrAdmin program cw 2011 id 3845 Nieznany
Programowanie liniowe 2011 (egzamin termin 2 zestaw 2)
kol pop sem2 ETI 2011
gi program ziip 2011 12 CRC D31503DC
kol pop dod sem2 ETI 2011
BT Program Projektu 2011 2012
1, 2 Historia i kultura Ameryki Łacińskiej, szczegółowy program zajęć 2011 2012 dla studentów
Zoot program wykładów 2011 12 5fantastic pl
więcej podobnych podstron