
Silnik BLDC-
Bezkomutatorowy silnik prądu
stałego

W układach napędowych najczęstsze
zastosowanie znajdują dwa typy
silników z magnesami trwałymi:
- o trapezoidalnym rozkładzie pola
magnetycznego w szczelinie - silnik
bezszczotkowy prądu stałego BLDC,
- o sinusoidalnym rozkładzie pola
magnetycznego w szczelinie - silnik
synchroniczny z magnesami trwałymi
PMSM.
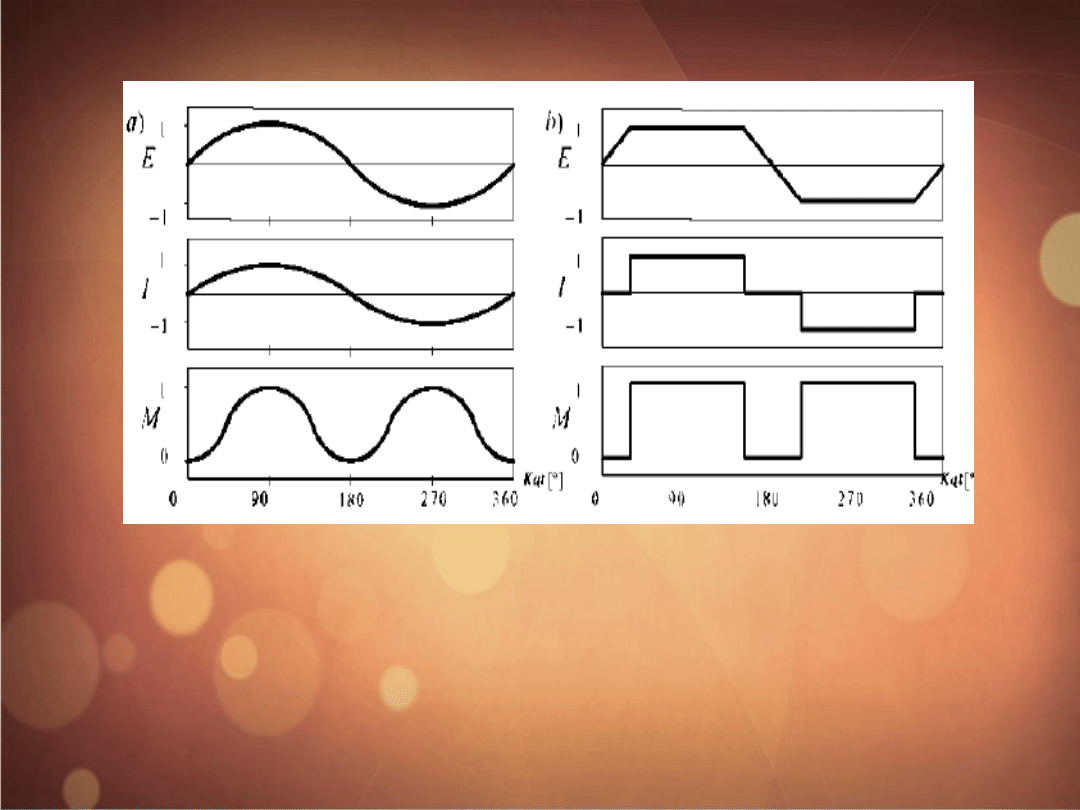
Przebiegi siły elektromotorycznej E, prądu I oraz
momentu T dla jednej fazy, a) silnik o sinusoidalnym
rozkładzie SEM b), typowy silnik o trapezoidalnym
rozkładzie SEM o stałych odcinkach na długości 120°

Bezkomutatorowe silniki prądu stałego
należą do grupy silników
synchronicznych. Oznacza to, że pola
wytwarzane przez uzwojenia stojana i
magnesy trwałe osadzone na wirniku,
poruszają się z tymi samymi
prędkościami. Sposób zasilania faz
silnika jest zależny od sygnałów
sterujących, które generowane są w
oparciu o sygnał sprzężenia zwrotnego
od położenia wirnika. Odpowiednie
zsynchronizowanie ich pozwala
uzyskać stały moment i prędkość
obrotową silnika.

Zastąpienie komutatora mechanicznego
elektronicznym jest powodem wielu zalet
tego silnika. Brak szczotek na
komutatorze oznacza brak wyładowań
łukowych. Powoduje to zmniejszenie
zakłóceń radioelektrycznych i pozwala na
pracę silnika w środowiskach
agresywnych i wybuchowych. Brak
szczotek zwiększa również
bezawaryjność silnika i jego żywotność.
Zaletą zastosowania komutatora
elektronicznego jest możliwość
stosunkowo łatwego kształtowania
charakterystyk silnika (np. można
stabilizować wybrany parametr).

Mimo, że silnik
BLDC jest silnikiem synchronicznym nie
występuje w nim zjawisko utraty synchronizmu
w
przypadku przeciążenia silnika, co jest wadą
innych maszyn synchronicznych. Właściwość
ta wynika ze sposobu generowania wirującego
pola magnetycznego. Pole to jest wytwarzane
w dziedzinie kąta mechanicznego położenia
wirnika względem stojana a nie jak w typowych
maszynach synchronicznych w dziedzinie
czasu.

Budowa
silnika
Budowa silnika BLDC z wirującym magnesem
jest w zasadzie odwróceniem silnika
komutatorowego
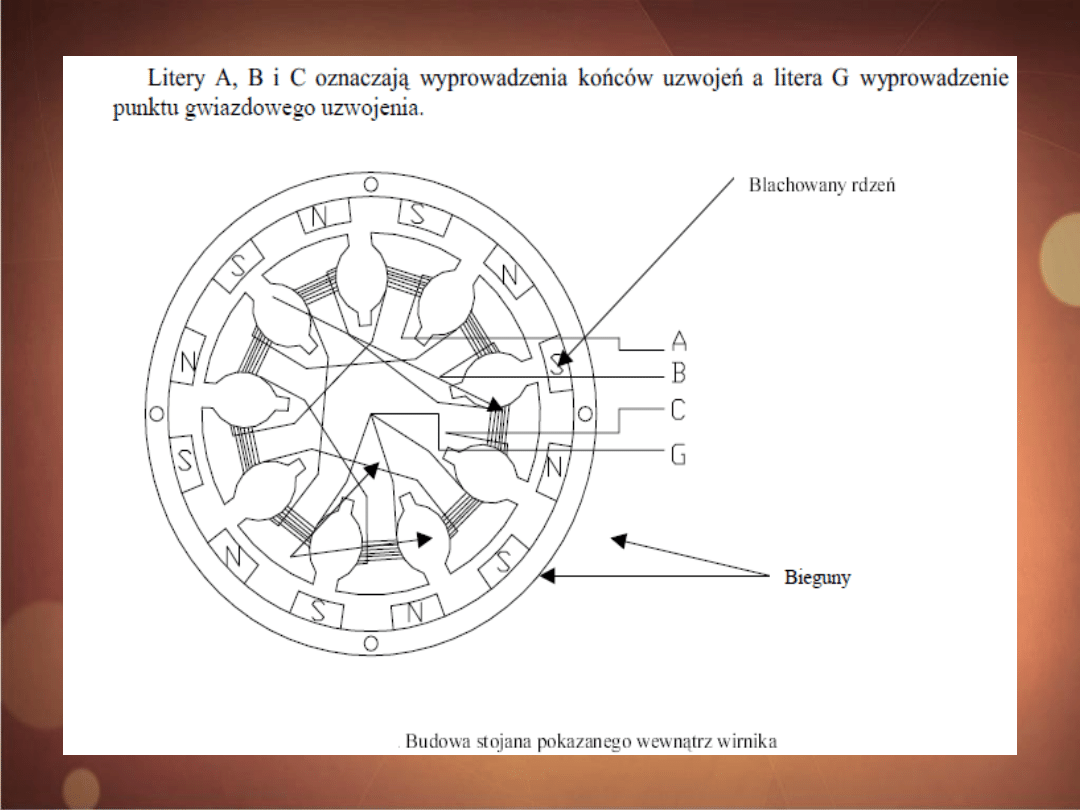
z magnesami trwałymi: stojan takiego
silnika jest wykonany z pakietu blach
elektromagnetycznych walcowanych na zimno.
Na obwodzie stojana znajdują się bieguny, na
których umieszczone są konwencjonalne,
koncentryczne uzwojenia. Najczęściej silniki
wyposażone są w dwie lub trzy pary biegunów.
Uzwojenia umieszczone na przeciwległych
biegunach tworzą tzw. „fazy”. Zwiększenie
liczby biegunów nie oznacza zwiększenia liczby
faz.

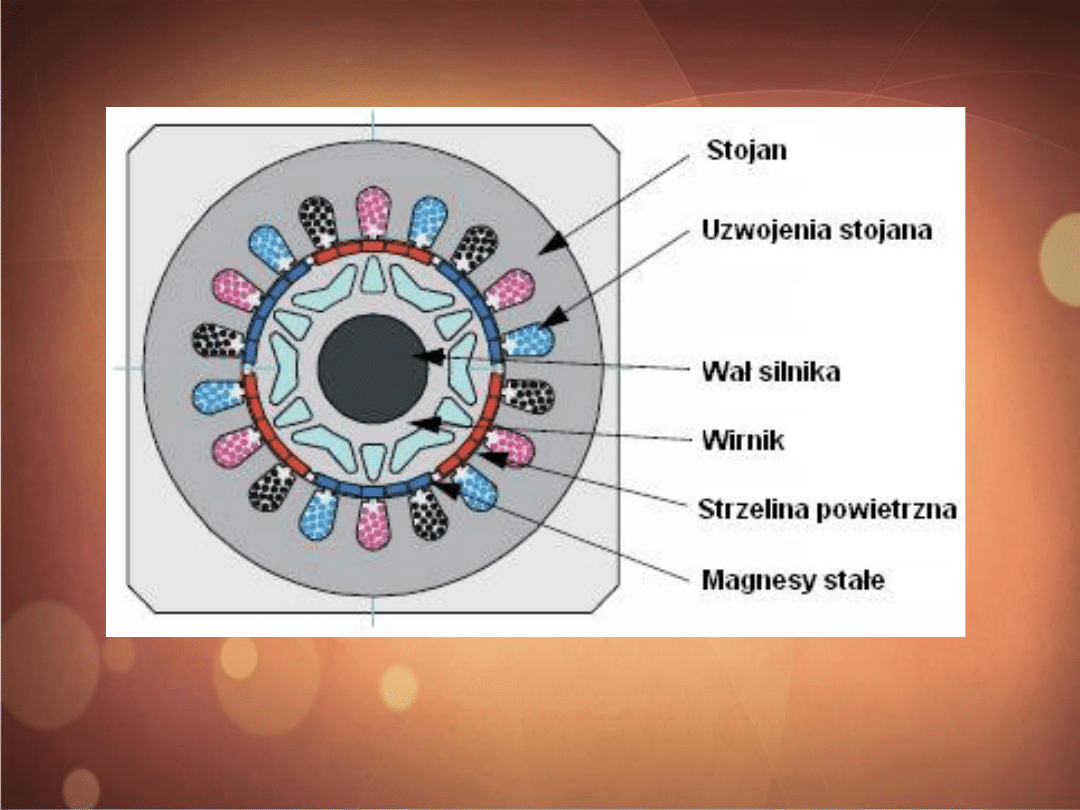
Wirnik wykonany jest z odpowiednio
ukształtowanego magnesu. Na obwodzie
wirnika silnika BLDC rozłożone
są magnesy trwałe. Aby uzyskać największą
sprawność silnika, do budowy wirnika należy
użyć magnesów trwałych z domieszką ziem
rzadkich. Pociąga to za sobą zwiększenie
nakładów finansowych w porównaniu z
zastosowaniem konwencjonalnych magnesów.
Mechaniczny komutator w silniku BLDC został
zastąpiony elektronicznym przełącznikiem,
którego stan wyjściowy określony jest funkcją
położenia rotora.


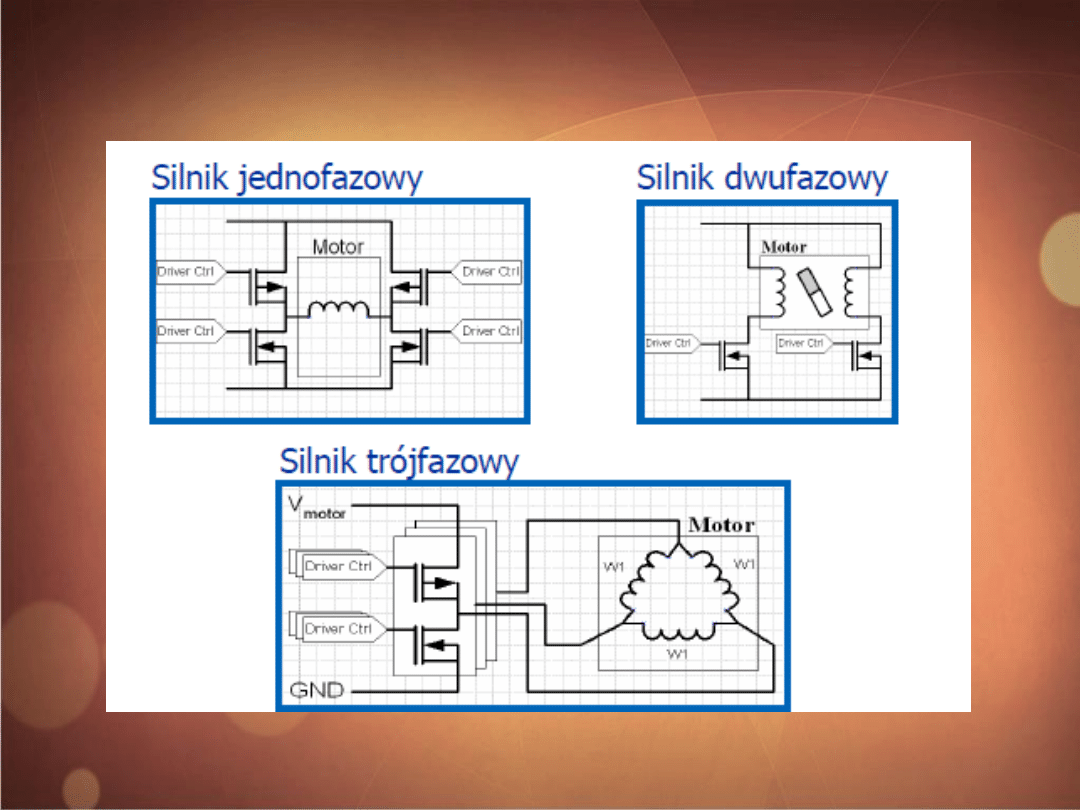
Ze względu na liczbę uzwojeń, silniki BLDC
możemy podzielić na jednofazowe, dwufazowe
i trójfazowe. Najbardziej popularne i najszerzej
stosowane są silniki trójfazowe. W
przeciwieństwie do silników jedno czy
dwufazowych silniki trójfazowe zapewniają
ciągłość oddziaływania momentu
napędowego na wirnik. Ponadto pozwalają ze
znacznie większą dokładnością sterować
położeniem
wirnika. Z powodów tych znajdują one coraz
częściej zastosowanie w aplikacjach, które
wymagają dużej precyzji, czyli m.in. takich jak
robotyka.
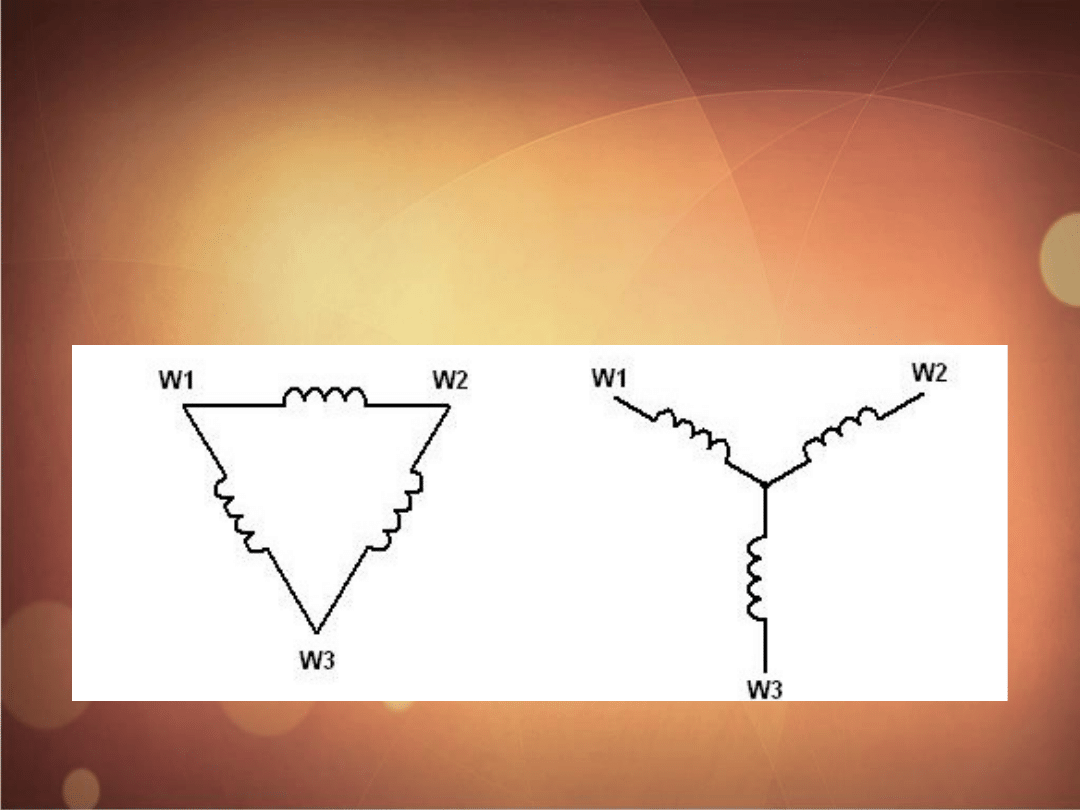
Dla silników trójfazowych wyróżnić można dwie
metody połączenia uzwojeń stojana:
• gwiazda
• trójkąt (delta)

Sposób połączenia uzwojeń ma wpływ na
metodę sterowania i parametry silnika.
Sterowanie
silnikami z uzwojeniami połączonymi w
gwiazdę jest bardziej skomplikowane niż
silnikami
pracującymi w konfiguracji delta. W
pierwszym wypadku silnik może wymagać
zasilania tylko
dwóch faz, podczas gdy trzecia faza pozostaje
nieobciążona. Warunek ten powoduje, że
układ
logiczny sterujący końcówką mocy staje się
trochę bardziej złożony. Silniki z uzwojeniami
połączonymi w gwiazdę charakteryzują się
większym momentem, mniejszą prędkością
obrotową i mniejszym poborem prądu niż
silniki o uzwojeniach połączonych w trójkąt.

Konfiguracja delta uzwojeń
stojana wymaga obciążenia wszystkich faz
podczas pracy silnika. Trójkątne
połączenie uzwojeń zapewnia większą moc
silnika, większą prędkość obrotową, powoduje
jednak
większy pobór prądu i nagrzewanie się silnika.
Nie stanowi to jednak większego problemu,
ponieważ uzwojenia silnika BLDC zamontowane
są na stojanie silnika co pozwala w łatwy
sposób
odprowadzą nagromadzone ciepło.

Wyróżnić można dwie konstrukcje wirnika:
• z magnesami naklejonymi na
powierzchnię wirnika
• z magnesami umieszczonymi
promieniowo
Liczba biegunów stojana i wirnika
determinuje wiele parametrów silnika. Ich
stosunek określa
krok silnika i wpływa na jakość
wytwarzanego momentu. Większa liczba
biegunów gwarantuje
bardziej równomierne rozłożenie
momentu napędowego a mniejszy krok
pozwala uzyskać
większą moc przy małych prędkościach
obrotowych.
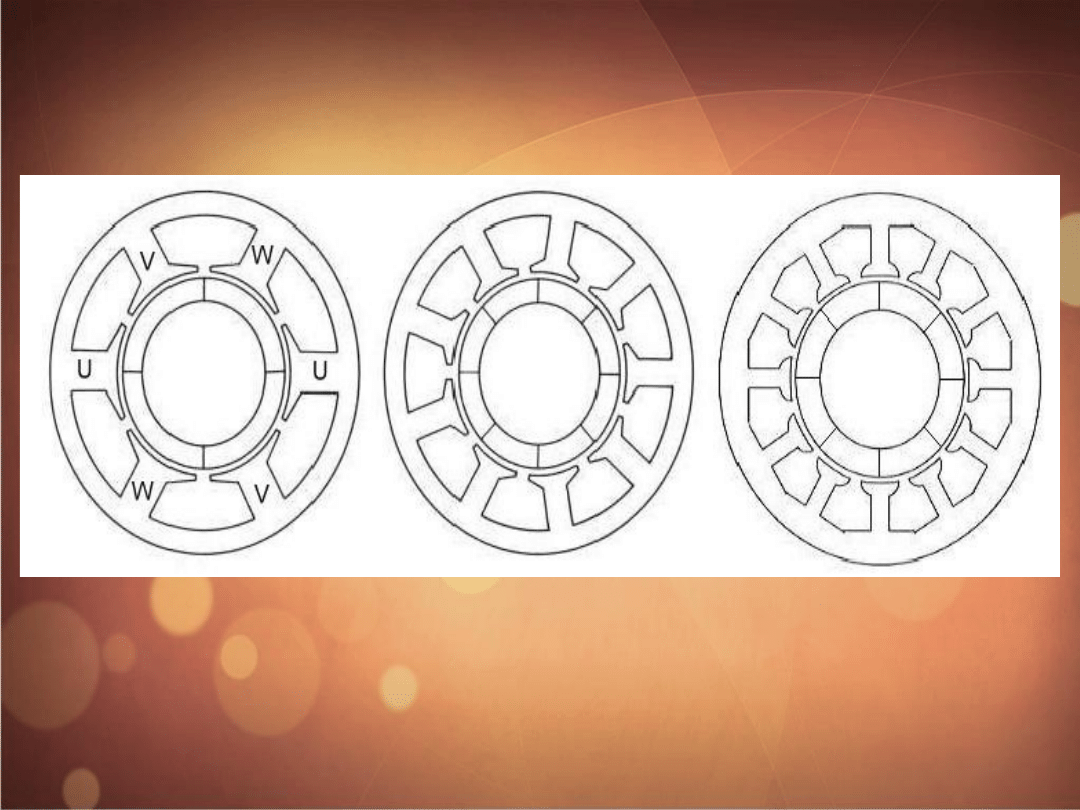
Konstrukcje silników BLDC
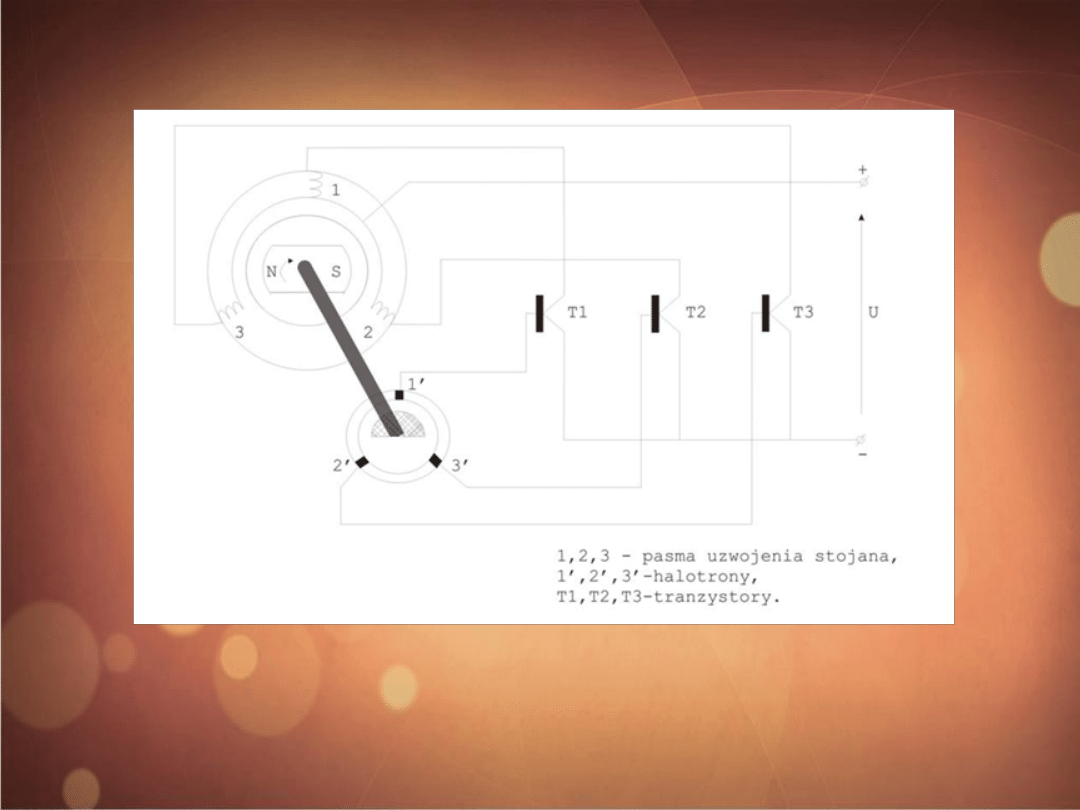
Schemat silnika BLDC

Zasada działania silnika o przebiegu
trapezoidalnym jest często odnoszona do
działania silnika prądu stałego. Konwencjonalny
silnik DC składa się z wirnika, który obraca się
w granicach pola magnetycznego stojana
zbudowanego z magnesów trwałych. Przez
zastosowanie komutatora i szczotek, zmiana
znaku prądu jest realizowana automatycznie, co
pozwala na obracanie się wirnika w tym samym
kierunku. Aby zrealizować obrót silnika
bezszczotkowego należy wyeliminować
uzwojenie z wirnika. Zostaje to uzyskane
poprzez
zamianę ról wirnika ze stojanem.
Zasada działania

Moment obrotowy w bezszczotkowym silniku
prądu stałego jest generowany dzięki
oddziaływaniu pomiędzy biegunami stojana a
magnesami trwałymi
umieszczonymi na wirniku. Moment ten określa
następujące równanie:
Te = i *yd+ (Ld -L)*id* i
W powyższym równaniu wykorzystano układ
współrzędnych dq. Układ ten jest układem
prostokątnym i nieruchomym względem
wirnika.
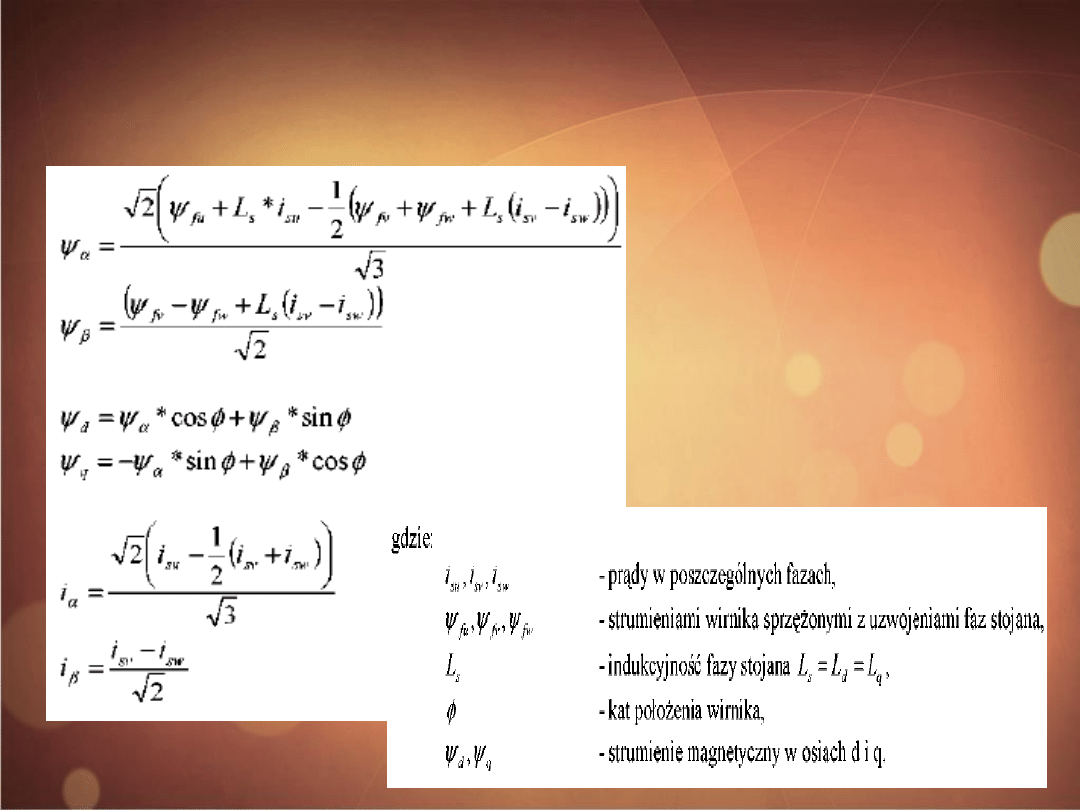
Poniżej przedstawiono transformacje z układu
współrzędnych abc do układu dq:
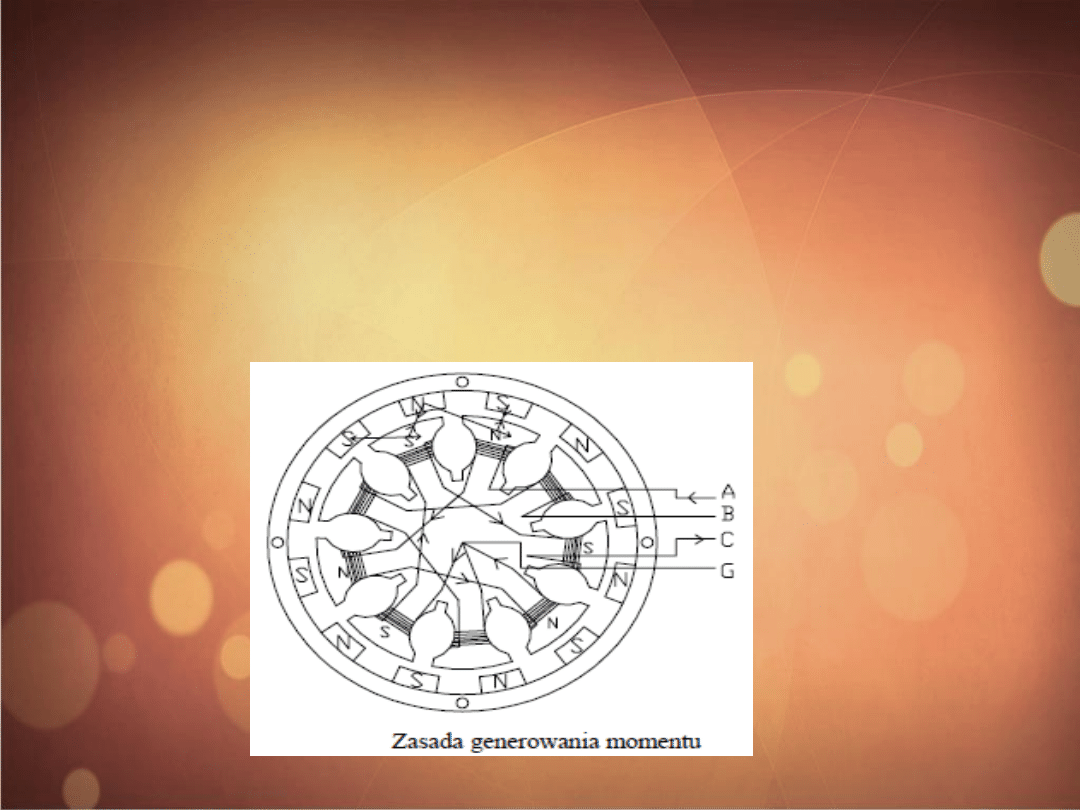
Na rysunku poniżej przedstawiono ogólną zasadę
generowania momentu w badanym silniku.
Zaznaczono na nich kierunki przepływu prądu w cewkach
w zależności od położenia wirnika
we wszystkich sześciu fazach pracy falownika oraz siły
działające pomiędzy magnesami
trwałymi a biegunami wirnika.

W danej chwili prąd płynie tylko przez dwie fazy.
Taki sposób sterowania i załączania kluczy
falownika jest charakterystyczny dla
bezszczotkowych silników prądu stałego. Posiada
on trapezoidalny rozkład pola magnetycznego w
wyniku, czego przebieg sił elektromotorycznych
w poszczególnych fazach ma kształt
trapezoidalny. Taki kształt przebiegu sił
elektromotorycznej wymusza odpowiednie
załączanie kluczy falownika. Kolejne sekwencje
załączania kluczy falownika powinny być
zmieniane w chwili, gdy przebieg Ezero uzyskuje
maksimum lub minimum. Wraz z rozwojem
techniki mikroprocesorowej poszukiwane są
różne sposoby rozwiązywania tego problemu.

Znaczny wzrost popularności silników
BLDC związany jest z wieloma
zaletami tego typu
maszyn, do których możemy zaliczyć:
• prostą budowę silnika,
• duży stosunek momentu do masy silnika,
• dużą sprawność,
• prosty układ sterowania,
• liniowa charakterystyka mechaniczna
• brak komutatora
• bardzo mała inercja wirnika
• sterowanie w szerokim zakresie prędkości,
• bardzo dokładną regulację prędkości bez
dodatkowych kosztów finansowych,
• wysoki moment rozruchowy,
• niskie koszty obsługi,
• brak szczotek (silnik staje się bardziej cichy,
niezawodny, brak zużywania mechanicznego oraz
przewodzącego pyłu).

Do najczęściej wymienianych wad
tego silnika należą:
- tętnienia momentu elektromagnetycznego,
- wysoki koszt magnesów trwałych
- konieczność stosowania czujników
położenia wału, co w znacznym stopni
wpływa na cenę układu napędowego.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
Wyszukiwarka
Podobne podstrony:
silnik bldc przebiegi czasowe
silnik bldc przebiegi czasowe
silniki prądu stałego
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
04 Zabezpieczenia silnikówid 5252 ppt
SILNIKI GRAFICZNE W GRACH KOMPUTEROWYCH
SILNIKI
Prezentacja OP silniki
silnik pradu stalego
Silnik rotacyjny, a silnik tłokowy
A3 Silnik indukcyjny pierscieniowy program
KODY USTEREK EOBD SILNIK ES9J4S (XFX)
Lokalizacja elementów silnika 1 4i TU3MC
Model silnika pradu stalego id Nieznany
bmw E38 E39 rozladowany akumulator halas z komory silnika
Opis silnikow krokowych id 3370 Nieznany
Napędy i silniki elektryczne
Badanie silnika pradu stałego
więcej podobnych podstron