
Metoda podziału i
ograniczeń
Janusz Papliński
Przykład wprowadzający
Znaleźć największą ilość różnych dodatnich liczb całkowitych, tak by ich suma była
równa 7
Opis matematyczny:
7
*
7
1
i
i
i
a
max
7
1
i
i
a
gdzie
0
1
i
a
Ograniczenie dolne
max
max
7
1
i
i
a
n
Ograniczenie górne
Dla warunku
7
*
7
1
i
i
i
a
Dokonujemy relaksacji (osłabienia)
7
*
7
1
i
i
i
a
dla którego
max
min
7
1
i
i
a
n
0
1
0
a
1
3
7
4
3
2
0
1
n
a
4
7
4
3
2
1
1
1
n
a
3
n
4
n
0
1
0
a
1
3
n
4
n
a
2
1
0
3
7
4
3
1
0
,
1
2
1
n
a
a
3
n
4
7
4
3
2
1
1
,
1
2
1
n
a
a
4
n
0
1
0
a
1
3
n
4
n
a
2
1
0
3
n
4
n
1
0
a
3
4
7
4
3
2
1
1
,
1
,
1
3
2
1
n
a
a
a
4
n
n
n
a
a
a
3
7
4
2
1
0
,
1
,
1
3
2
1
n
n
3
0
1
0
a
1
3
n
4
n
a
2
1
0
3
n
4
n
1
0
a
3
4
n
n
n
3
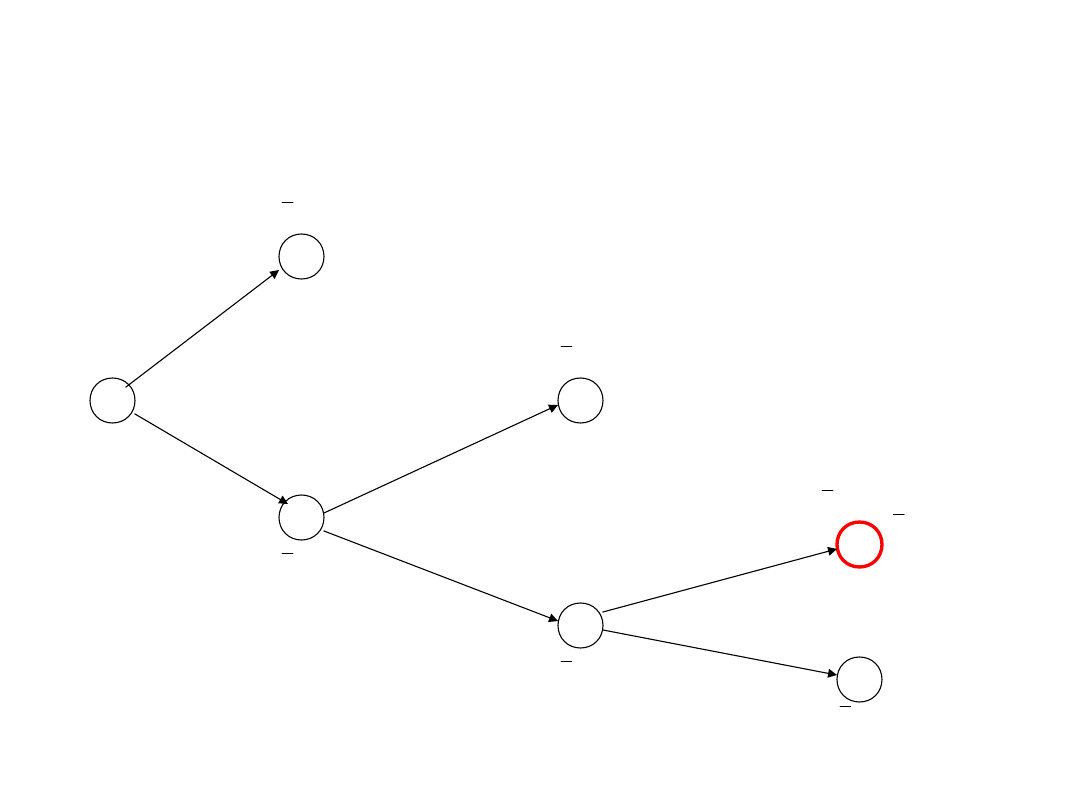
Metoda podziału i ograniczeń
•Generuje trajektorię fragmentami
•Stosuje procedury powrotu
•Niektóre procedury są odrzucane, jeśli nie prowadzą do rozwiązania optymalnego
•Wyznacza się ograniczenie górne i dolne
Idea metody:
Dzielenie generowanych trajektorii na pozostawiane i odrzucane, oraz
posługiwanie się ograniczeniami do oceny perspektywiczności
29.10.09
29.10.09

Metoda podziału i ograniczeń
Generowanie stanów
Generowanie stanów obejmuje
Reguły podziału
Reguły wyboru
Procedury generowania stanów
Stan aktywny – stan pozwalający wygenerować stan następny
Stany aktywne umieszczone są na liście stanów aktywnych
Stan z którego generuje się stany jest usuwany z listy stanów aktywnych
Na listę wpisuje się każdy wygenerowany stan aktywny

Metoda podziału i ograniczeń
Reguły wyboru – określają stan wybrany z listy stanów aktywnych do
generowania dalszych stanów.
FIFO – first in, first out
Bardzo dużo stanów generowanych
LIFO – last in, first out
Poszukiwania w głąb.
LLB – least lower bound
Daje nadzieje na szybkie znalezienie rozwiązania bliskiego
optymalnemu

Metoda podziału i ograniczeń
Eliminowanie stanów
Cel – pomijanie w obliczeniach trajektorii nie prowadzącej do rozwiązania
optymalnego
Reguła wyczerpywania
Pozwala sprawdzić, czy ze stanu P
,
nie da się uzyskać żadnego rozwiązania
dopuszczalnego
Gdzie - nr stanu;
- stopień rozbicia
Należy wykazać, że w stanie P
,
jest operacja
n
która przekracza przyjęte
ograniczenia

Metoda podziału i ograniczeń
Reguły sondowania
Dla każdego stanu P
,
nie wyeliminowanego regułami wyczerpywania
oblicza się dolne V
d
,
i górne
V
g
,
ograniczenie funkcji celu
.
Ograniczenia górne V
g
,
(dla szukania minimum) – pewne dopuszczalne
rozwiązanie uzyskane ze stanu P
,
, np. za pomocą heurystyki
Ograniczenie dolne V
d
,
(dla szukania minimum) – wyznacza się przez relaksację
(osłabienie) ograniczeń obszaru dopuszczalnego

Ze stanu P
,
nie można uzyskać lepszego rozwiązania niż
V
g
,
jeżeli spełniony jest
warunek
Metoda podziału i ograniczeń
(1)
,
,
g
d
V
V
W obliczeniach zapamiętuje się najlepszy w danej chwili stan końcowy P
*
o
wartości V
*
.
Ze stanu P
,
nie można uzyskać lepszego rozwiązania niż P
*
jeżeli
(2)
,
*
d
V
V
1. Jeżeli jest spełniony warunek (2), to stan P
,
eliminujemy z dalszych obliczeń
2. Jeżeli jest spełniony warunek (1), a nie jest (2), to stan otrzymany ze stanu jest
w danej chwili najlepszym stanem końcowym
3. Jeżeli warunki (1) i (2) nie są spełnione, to stanu nie da się wyeliminować za
pomocą reguł sondowania.
Reguły dominacji
Wygenerowany stan porównuje się ze stanami aktywnymi. Stany zdominowane
eliminuje się z listy stanów aktywnych
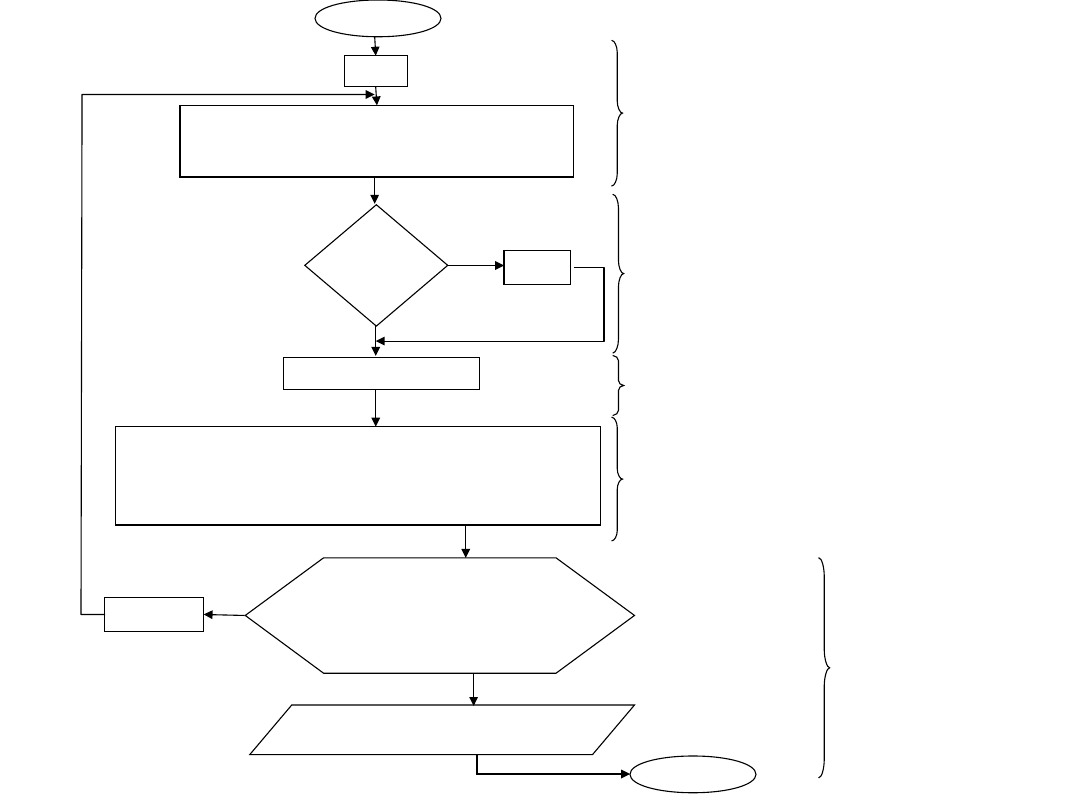
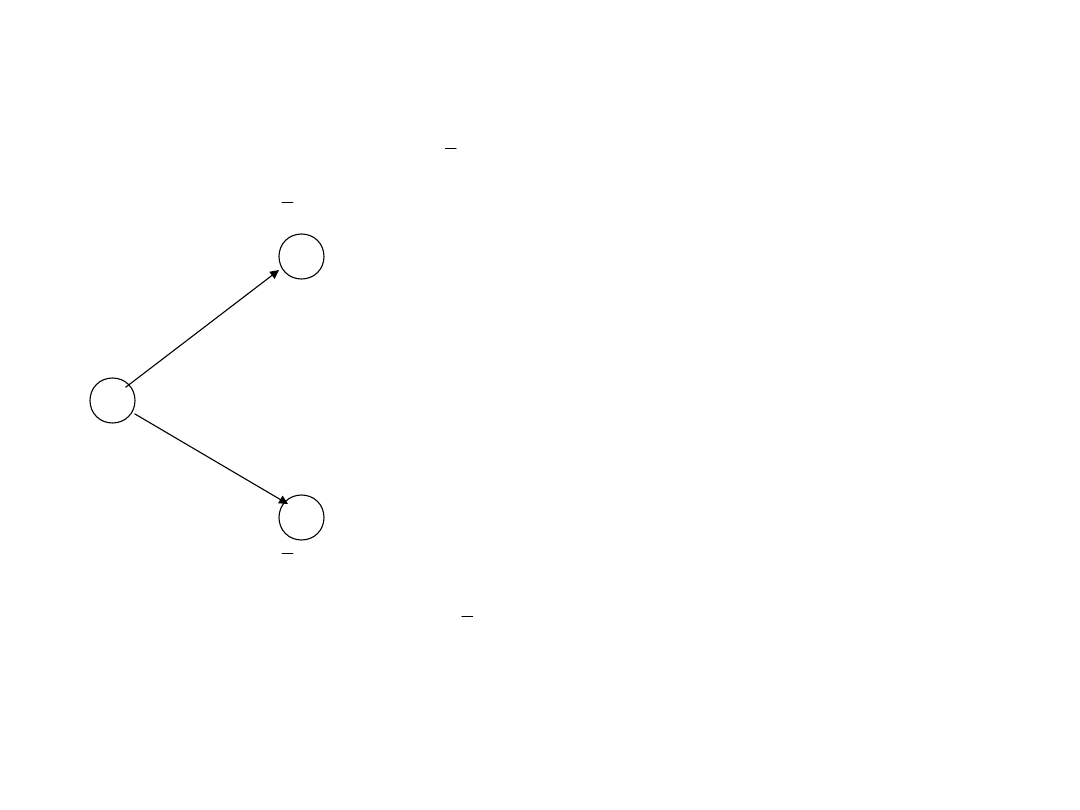
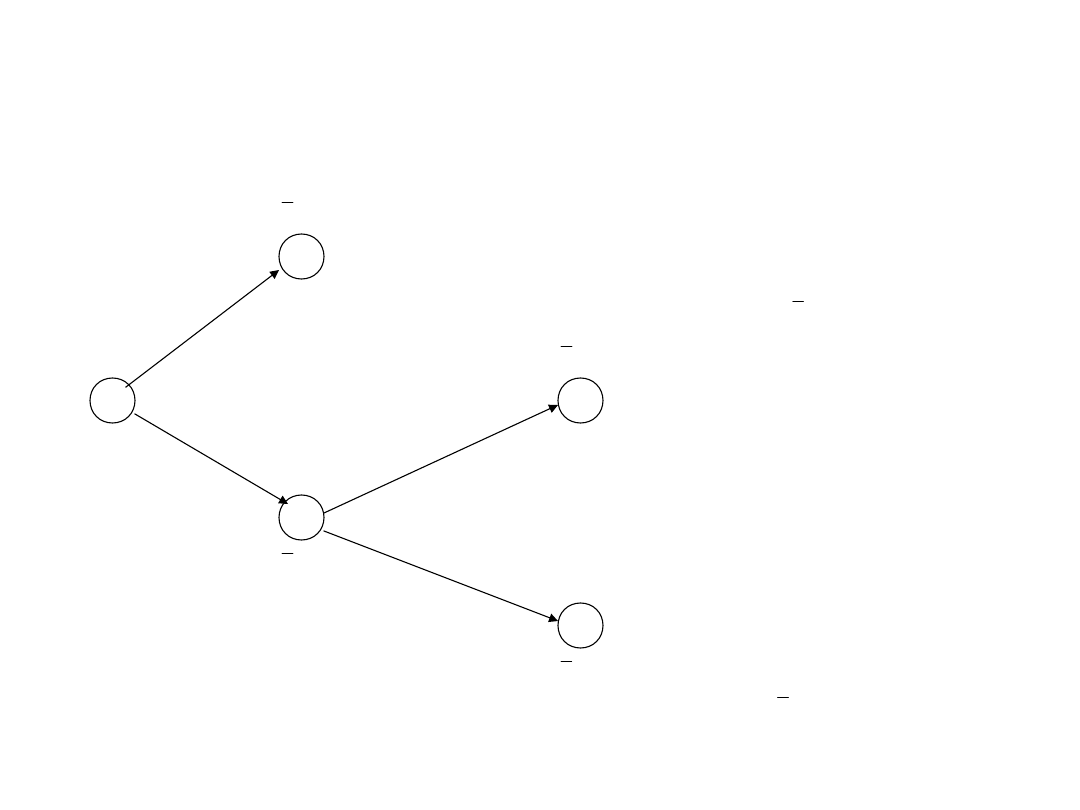
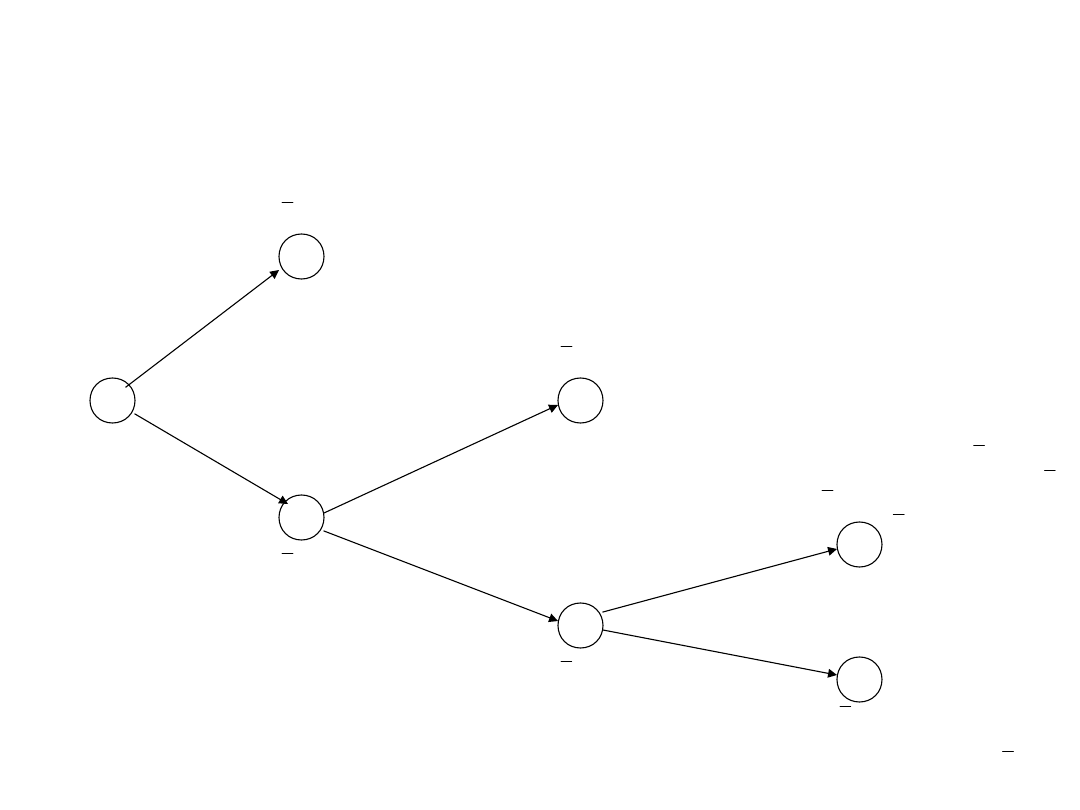
r=1
Dokonaj rozbicia zbioru wszystkich
rozwiązań na n podzbiorów (stanów), w
których na pierwszym miejscu znajduje
się jeden z n wyrobów.
START
If n – r =
1
r =
n
LB(N
r
) = ...
Wybierz stan o minimalnej wartości dolnego
ograniczenia LB.
Dla kilku wierzchołków o tej samej wartości LB,
wybierz ten który ma największy stopień rozbicia
r.
If r = n
i wartość dolnego ograniczenia
rozważanego stanu jest nie
mniejsza od LB innych stanów
aktywnych
Znaleziono rozwiązanie
optymalne
STOP
r = r +
1
N
T
N
T
KROK 1
KROK 2
KROK 3
KROK 4
KROK 5
Przykład
Algorytm metody podziału i ograniczeń dla zagadnienia harmonogramowania w
systemie przepływowym
Wartość dolnego ograniczenia dla zbioru N
r
utworzonego z r zadań wybranych
spośród n zadań w sekwencji (J
(1)
, J
(2)
, ..., J
(r)
)
k
N
E
k
N
F
N
LB
r
r
m
k
r
,
,
max
,
1
gdzie
m – ilość maszyn
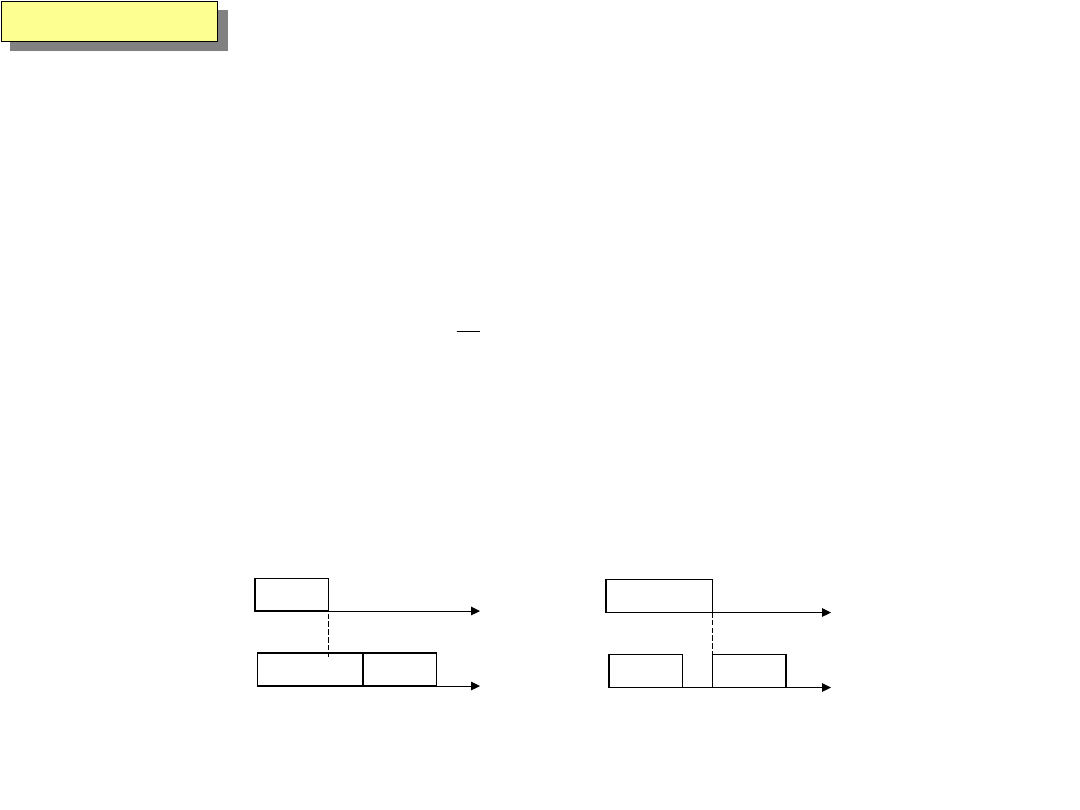
J
(r )
J
(r-1)
J
(r )
M
k-1
M
k
F(N
r-1
,k)
F(N
r
,k-
1)
F(N
r
,k)
J
(r )
J
(r-1)
J
(r )
M
k-1
M
k
F(N
r
,k-
1)
F(N
r-1
,k)
F(N
r
,k)
k
r
k
r
k
r
r
t
F
F
k
N
F
,
1
,
,
1
,
max
,
czas ukończenia zadania J
(r )
z sekwencji (J
(1)
, J
(2)
, ..., J
(r)
), wykonanego na k-tej
maszynie
5.11.09
5.11.09
k
N
E
k
N
F
N
LB
r
r
m
k
r
,
,
max
,
1
ocena czasu wykonania pozostałych R
r
zadań na k-tej maszynie, oraz czasy
wykonania pozostałych zadań na maszynach M
k+1
, M
k+2
, ..., M
n
m
k
R
R
k
r
t
t
k
N
E
r
r
1
min
,
Maszyna M1
Maszyna M2
Maszyna M3
Maszyna M4
Maszyna M5
1
5
8
20
5
13
2
2
5
3
20
4
3
30
4
5
3
21
4
6
30
6
14
8
Zadanie
jednostkowe czasy wykonania operacji
KROK 1
r = 1
Stany aktywne: {J
1
}, {J
2
},{J
3
},{J
4
},
Dla stanu {J
2
}:
J
(1)
= J
2
R
r
= {1, 3, 4}
Wyznaczamy LB(N
1
={J
2
)):
Czasy zakończenia 1-wszego zadania na poszczególnych maszynach
F(N
1
,1) = t
(1)1
= t
21
= 2 F(N
1
,2) = F(N
1
,1) + t
(1)2
= t
21
+ t
22
= 2 +5 = 7
1-wsze
wykonywane
zadanie
Na 1-wszej
maszynie
2 – ga
maszyna
F(N
1
,3) = 10;
F(N
1
,4) = 30;
F(N
1
,5) = 34
k
N
E
k
N
F
N
LB
r
r
m
k
r
,
,
max
,
1
k
r
k
r
k
r
r
t
F
F
k
N
F
,
1
,
,
1
,
max
,
m
k
R
R
k
r
t
t
k
N
E
r
r
1
min
,
Maszyna M1
Maszyna M2
Maszyna M3
Maszyna M4
Maszyna M5
1
5
8
20
5
13
2
2
5
3
20
4
3
30
4
5
3
21
4
6
30
6
14
8
Zadanie
jednostkowe czasy wykonania operacji
F(N
1
,1) = 2
F(N
1
,2) = 7
F(N
1
,3) = 10;
F(N
1
,4) = 30;
F(N
1
,5) = 34
k
N
E
k
N
F
N
LB
r
r
m
k
r
,
,
max
,
1
k
r
k
r
k
r
r
t
F
F
k
N
F
,
1
,
,
1
,
max
,
m
k
R
R
k
r
t
t
k
N
E
r
r
1
min
,
74
58
,
33
,
46
min
41
,
,
min
min
1
,
45
44
43
42
35
34
33
32
15
14
13
12
41
31
11
5
2
1
1
t
t
t
t
t
t
t
t
t
t
t
t
t
t
t
t
t
N
E
n
R
R
r
r
70
,
,
min
min
2
,
45
44
43
35
34
33
15
14
13
42
32
2
,
1
5
3
2
1
t
t
t
t
t
t
t
t
t
t
t
t
t
t
N
E
r
r
R
R
E(N
1
,3)=48; E(N
1
,4)=29;
E(N
1
,5)=42
J
(1)
= J
2
R
r
= {1, 3, 4}
Maszyna M1
Maszyna M2
Maszyna M3
Maszyna M4
Maszyna M5
1
5
8
20
5
13
2
2
5
3
20
4
3
30
4
5
3
21
4
6
30
6
14
8
Zadanie
jednostkowe czasy wykonania operacji
F(N
1
,1) = 2
F(N
1
,2) = 7
F(N
1
,3) = 10;
F(N
1
,4) = 30;
F(N
1
,5) = 34
k
N
E
k
N
F
N
LB
r
r
m
k
r
,
,
max
,
1
k
r
k
r
k
r
r
t
F
F
k
N
F
,
1
,
,
1
,
max
,
m
k
R
R
k
r
t
t
k
N
E
r
r
1
min
,
74
1
,
1
N
E
70
2
,
1
N
E
E(N
1
,3)=48;
E(N
1
,4)=29;
E(N
1
,5)=42
77
42
34
,
29
30
,
48
10
,
70
7
,
74
2
max
2
1
J
N
LB
104
,
104
,
83
4
1
3
1
1
1
J
N
LB
J
N
LB
J
N
LB
Maszyna M1
Maszyna M2
Maszyna M3
Maszyna M4
Maszyna M5
1
5
8
20
5
13
2
2
5
3
20
4
3
30
4
5
3
21
4
6
30
6
14
8
Zadanie
jednostkowe czasy wykonania operacji
KROK 2
r = 3
n – r = 4 – 3 =1 stąd
r = n = 4
Stany aktywne: {J
2
,J
1
J
3
J
4
}, {J
2
,J
1
J
4
J
3
},
104
,
104
,
83
4
1
3
1
1
1
J
N
LB
J
N
LB
J
N
LB
KROK 3
r = 2
Nowe stany aktywne: {J
2
,J
1
}, {J
2
J
3
}, {J
2
J
4
},
94
,
101
3
4
1
2
4
4
3
1
2
4
J
J
J
J
N
LB
J
J
J
J
N
LB
95
,
102
,
81
4
2
2
3
2
2
1
2
2
J
J
N
LB
J
J
N
LB
J
J
N
LB
KROK 4
100
,
101
4
3
2
1
2
4
3
2
1
4
J
J
J
J
N
LB
J
J
J
J
N
LB
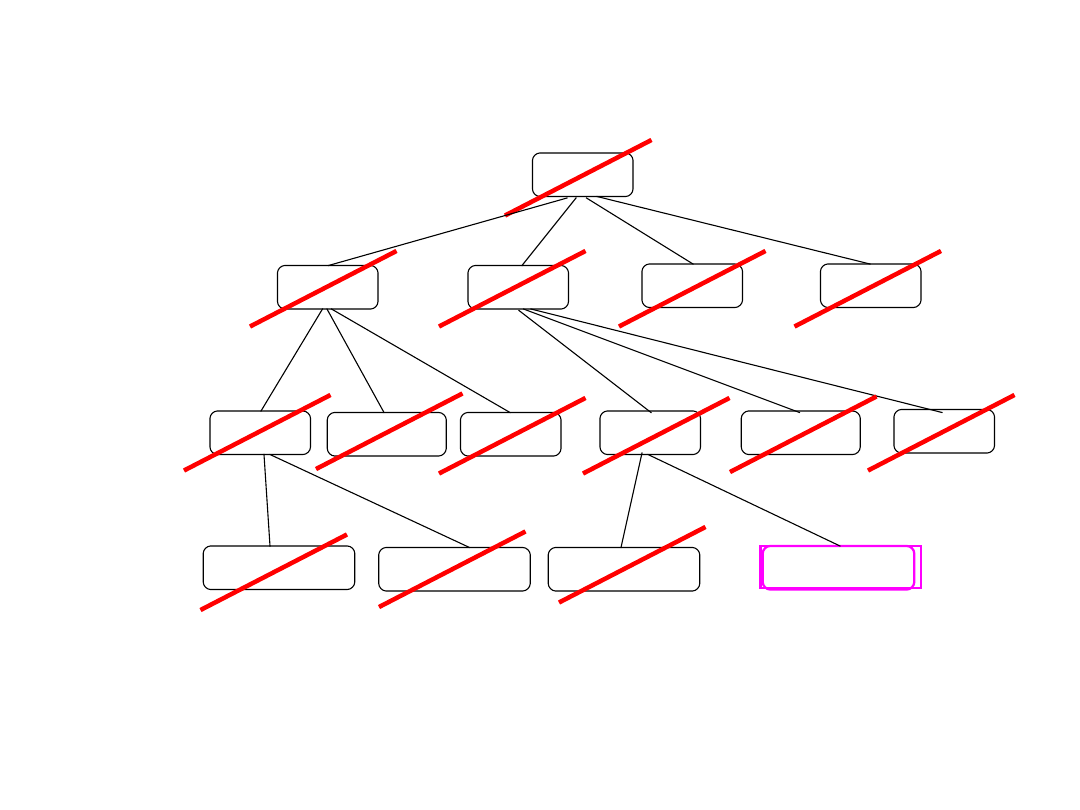
J
1
(83)
J
2
(77)
J
3
(104)
J
4
(102)
J
2
J
1
(95)
J
2
J
1
(102)
J
2
J
1
(81)
J
2
J
1
J
3
J
4
(101)
J
2
J
1
J
4
J
3
(94)
J
1
J
4
(96)
J
1
J
3
(101)
J
1
J
2
(90)
J
1
J
2
J
3
J
4
(101)
J
1
J
2
J
4
J
3
(100)
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
Wyszukiwarka
Podobne podstrony:
Metoda podzialu i ograniczen
Programowanie całkowitoliczbowe metoda podziału i ograniczeń
Metoda podzialu i ograniczen
depresja 08 09
PM 08 09 L dz 2 Makrootoczenie
ekonomia 08.09.2010, Notatki lekcyjne ZSEG, Ekonomia
[08-09] Czerniak zlosliwy2, = III ROK =, =Patomorfologia=, =Wykłady=
biologia 2 wl1 08 09
KCh PUREX B POLITECHNIKA 08 09 26
kurier warszawski 08 09 1939
II D+W Nowy Świat wyk+ćw 08-09, Archeo, ARCHEOLOGIA NOWEGO ŚWIATA
IT 6 mgr W PZ WZ 08 09
jod metoda podział1
IMiUE, 9 08 09 zał III
więcej podobnych podstron