MANIPULATOR ROBOTA
W ASPEKCIE
KINEMATYKI CIAŁA
SZTYWNEGO
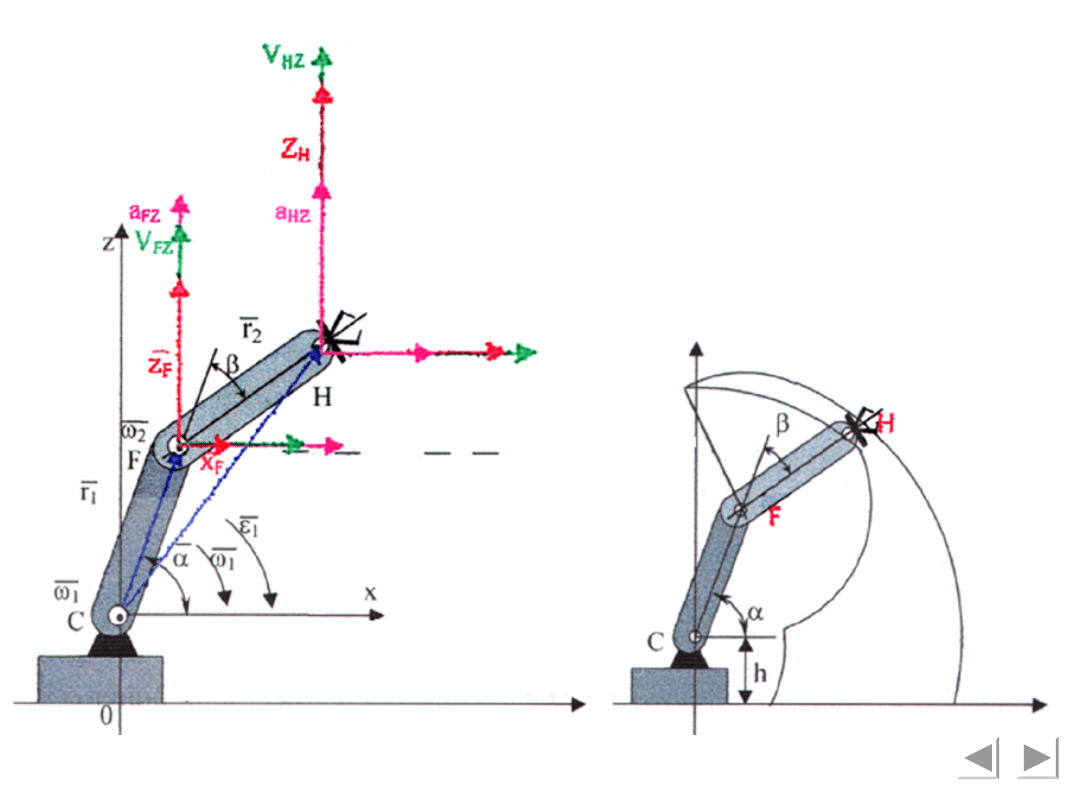
Wyznaczenia: toru, prędkości i
przyspieszenia punktu H, metodą
wyznaczania kolejnych różniczek
równania ruchu.
Przyjmując
jednoczesny
ruch
dwóch
ogniw
wyznaczymy
ich
tory
ruchu,
prędkości
i
przyspieszenia.
Niech
1
r
CF
a
2
r
FH
Składowe wektora położenia punktu F:
x
F
= r
1
cosα
z
F
= h + r
1
sinα
wyłączając z tego kąt
α
otrzymujemy
2
2
2
r
h
z
x
F
F
Jak widać torem punktu F jest okrąg o środku w
punkcie C(0,h) i promieniu r
1
. Prędkość punktu F
poprzez
różniczkowanie
składowych
wektora
położenia punktu F:
sin
d
d
sin
d
d
1
1
ω
r
t
r
t
x
V
F
x
cos
d
d
cos
d
d
1
r
t
t
z
V
F
z
1
1
2
2
r
V
V
V
z
x
F
Przyśpieszenie punktu F:
- układ kartezjański
cos
sin
d
d
2
1
1
1
1
r
r
t
V
a
x
x
sin
cos
d
d
2
1
1
1
1
r
r
t
V
a
z
z
4
1
2
1
1
2
2
r
a
a
a
z
x
F
- układ naturalny (wg stycznej i normalnej)
1
1
1
1
d
d
d
d
r
t
r
t
v
a
t
2
1
1
1
2
r
r
V
a
n
4
1
2
1
1
4
1
2
1
2
1
2
2
r
r
a
a
a
n
t
F
Równanie ruchu punktu H:
Równania toru punktu H
cos
cos
2
1
r
r
x
H
sin
sin
2
1
r
r
h
z
H
Przy ustalonej wartości kąta β torem punktu H jest
okrąg o równaniu:
2
2
2
2
2
1
2
2
sin
cos
CH
r
r
r
h
z
x
H
H
- ruch członu 2
Natomiast przy ustalonej wartości kąta α torem
punktu H jest okrąg o równaniu:
2
2
2
1
2
1
sin
cos
r
r
h
x
r
x
H
H
(ruch członu 1)
Prędkość punktu H otrzymamy różniczkując
równania ruchu punktu H względem czasu
sin
sin
d
d
2
1
2
1
1
r
r
t
x
V
H
x
cos
cos
d
d
2
1
2
1
1
r
r
t
z
V
H
z
2
2
1
2
2
2
1
1
2
1
2
1
2
1
2
2
2
cos
2
ω
ω
r
β
ω
ω
ω
r
r
ω
r
V
V
V
z
x
H
Podobnie różniczkując równania ruchu punktu H
względem czasu otrzymamy jego przyspieszenie:
cos
sin
cos
sin
d
d
2
2
1
2
1
2
2
1
1
1
r
r
t
V
a
x
x
a
b
sin
cos
sin
cos
d
d
2
2
1
2
1
2
2
1
1
1
r
r
t
V
a
z
z
c
d
4
2
1
2
2
1
2
2
4
1
2
1
2
1
2
2
2
r
cd
ab
r
a
H
2
2
z
x
H
a
a
a
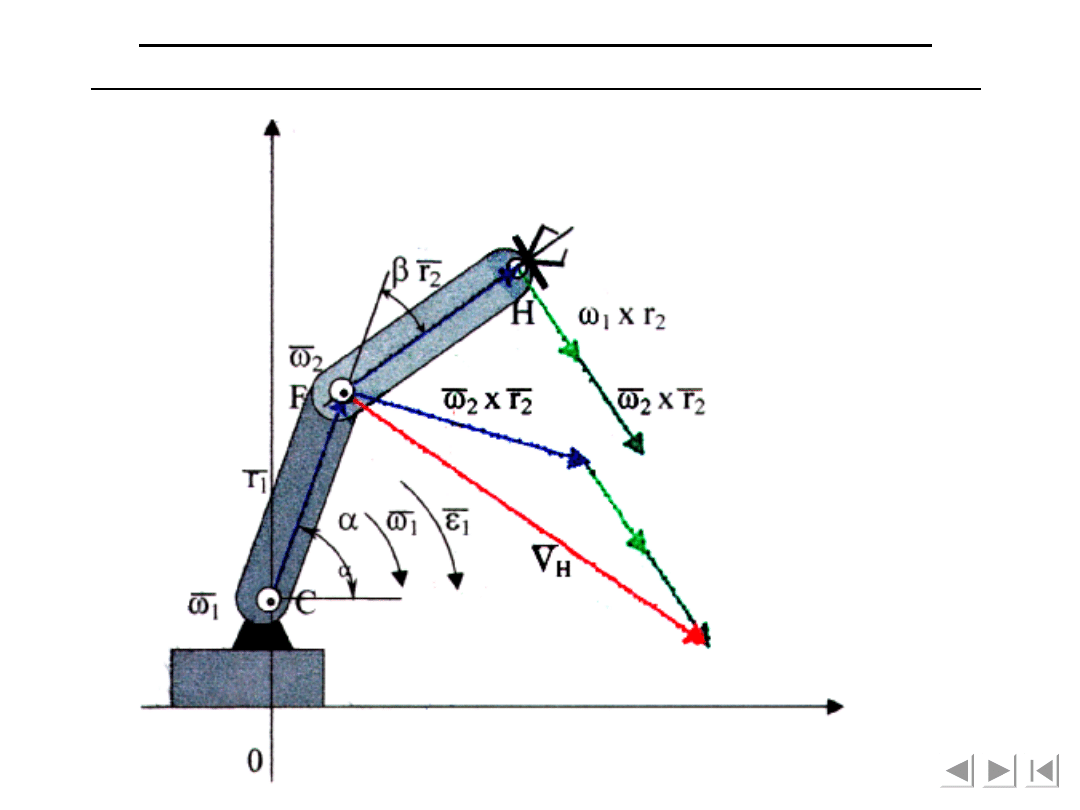
Rozwiązanie klasyczne do wyznaczania
prędkości i przyspieszeń punktu H
jako ruch złożony
Przyjmując
jednoczesny
ruch
dwóch
ogniw
wyznaczamy
ich
prędkości
i
przyspieszenia
rozkładając ruch punktu H na ruch unoszenia i
względny:
1
1
r
V
F
2
1
1
1
2
1
r
r
r
V
V
F
U
3
2
r
V
W
2
2
1
2
2
2
1
1
2
1
2
1
2
1
2
cos
2
r
r
r
r
V
H
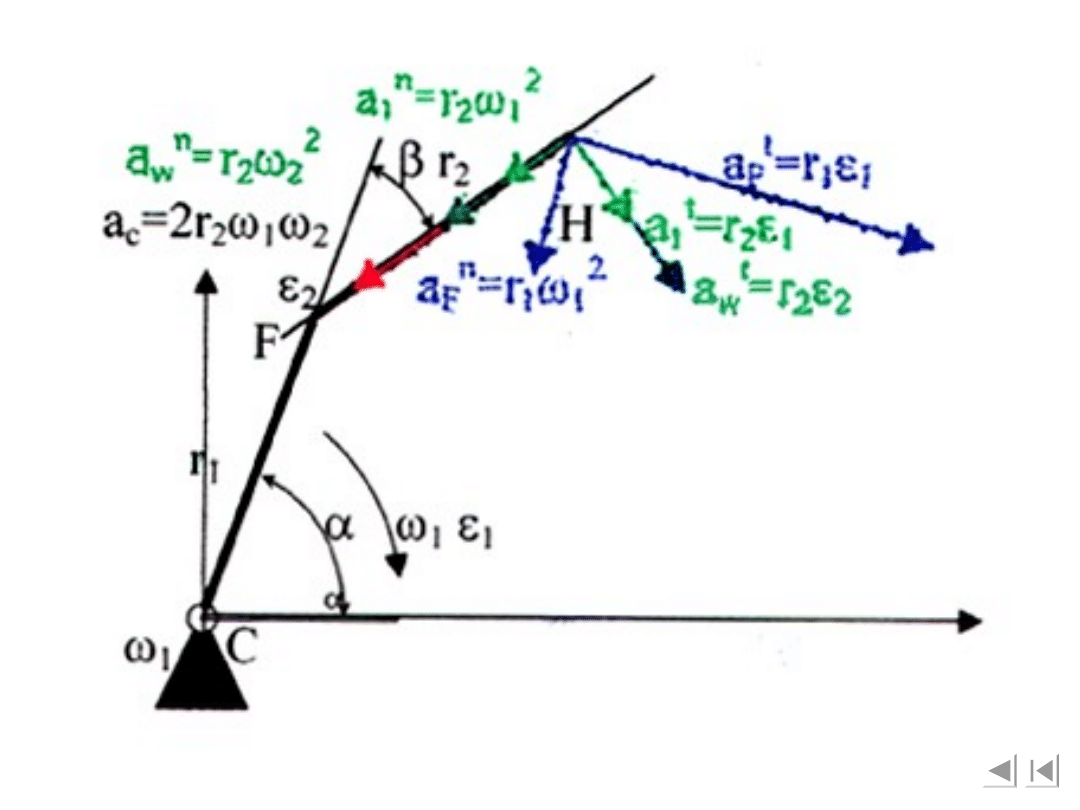
Przyspieszenia punktu H wyznaczymy rozpatrując
ruch złożony punktu H oraz ruch płaski ramienia:
W
W
F
H
V
a
r
r
a
a
1
2
1
1
2
1
2
gdzie:
n
F
t
F
F
a
a
a
1
1
r
a
t
F
2
1
1
r
a
n
F
n
W
t
W
W
a
a
a
2
2
r
a
t
W
2
2
2
r
a
n
W
2
2
1
1
2
2
r
V
a
W
C
W
H
V
ω
ω
r
ε
r
r
ω
ω
r
ε
ω
r
ε
r
a
1
2
2
2
2
2
2
1
1
2
1
2
1
1
1
1
2
Przyspieszenie punktu H względem punktu F
można wyznaczyć też z zależności:
t
HF
n
HF
n
F
t
F
HF
F
H
a
a
a
a
a
a
a
1
1
r
a
t
F
2
1
1
r
a
n
F
2
1
2
r
a
t
HF
2
1
2
2
2
2
2
1
2
2
2
1
2
2
r
r
r
r
a
n
HF
t
HF
n
HF
HF
a
a
a
2
2
1
2
2
1
2
2
1
1
1
1
r
r
r
r
a
H
Moduł przyspieszenia a
H
obliczymy, rzutując
wszystkie jego składowe na prostą F
H
i prostopadła
do niej:
sin
cos
2
1
1
1
1
2
2
1
2
2
r
r
r
r
a
2
2
2
1
a
a
a
H
cos
sin
2
2
1
1
1
1
2
1
2
2
2
2
2
1
2
1
r
r
r
r
r
a
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
kinematyka ciała sztywnego
kinematyka ciała sztywnego
7 KINEMATYKA CIAŁA SZTYWNEGO
7 Kinematyka 2, Wybrane przypadki ruchu ciala sztywnego
7 Kinematyka 2 Wybrane przypadki ruchu ciala sztywnego
10 Struktury manipulatora o zamkniętym łańcuchu kinematycznym
5 dynamika ciala sztywnego id Nieznany (2)
Precesja regularna ciała sztywnego
Wyznaczanie elipsoidy bezwładności bryły, FIZYKA 1, WYZNACZANIE ELIPSOIDY BEZWŁADNOŚCI CIAŁA SZTYWNE
Wyznaczanie elipsoidy bezwładności bryły, FIZYKA 1, WYZNACZANIE ELIPSOIDY BEZWŁADNOŚCI CIAŁA SZTYWNE
fizyka 4 MECHANIKA CIAŁA SZTYWNEGO
Pomiar bezwladnosci ciala sztywnego za pomoca wahadla skretn, Księgozbiór, Studia, Mechnika Doświadc
więcej podobnych podstron