
Bezpieczne układy
pneumatyczne
Wykład przygotowany przez pracownika
Instytutu Technik Wytwarzania PW
Wojciecha Kramarka

Struktura systemów sterowania
związanych z bezpieczeństwem
System sterowania związany z bezpieczeństwem (SRCS
— safety related control system) jest tą częścią systemu
sterowania maszyny, której zadaniem jest zapobieganie
sytuacjom zagrożenia. Może to być osobny system
dedykowany lub zintegrowany ze standardowym systemem
sterowania.
Systemy sterowania związane z bezpieczeństwem
odpowiadają za wykonywanie funkcji bezpieczeństwa. SRCS
musi działać prawidłowo we wszystkich możliwych do
przewidzenia warunkach.

Funkcja bezpieczeństwa
Funkcja bezpieczeństwa jest realizowana przez
elementy systemu sterowania związane z bezpieczeństwem
w celu zapewnienia lub utrzymania bezpiecznej kontroli nad
sprzętem w obliczu określonego zagrożenia. Niezadziałanie
funkcji bezpieczeństwa może skutkować natychmiastowym
zwiększeniem ryzyka korzystania ze sprzętu, czyli
wystąpieniem zagrożenia.

Obszar bezpiecznego sterowania
Aby zminimalizować ryzyko tworzone przez układ
sterujący maszyny należy rozważać wszystkie elementy
układu, a nie ograniczać się do układu elektrycznego.
Bezpieczeństwo systemu zależy od najsłabszego ( z punktu
widzenia bezpieczeństwa) elementu w układzie sterującym.
Może to być element części pneumatycznej, hydraulicznej
lub mechanicznej.

Wymagania dla elementów pneumatycznych
W układzie sterującym odpowiadającym za
bezpieczeństwo maszyny, a zawierającym elementy
pneumatyczne, muszą być spełnione następujące warunki:
-elementy pneumatyczne muszą pracować w układzie
redundancyjnym,
-muszą być monitorowane w celu sprawdzenia
wykonywania poleceń sterujących a także w celu
wykrywania znaczącej zmiany w charakterystykach,
-elementy sterujące muszą powracać do bezpiecznej
pozycji w przypadku zaniku ciśnienia zasilającego lub zaniku
sygnału elektrycznego,
-elementy sterujące muszą zablokować działanie układu po
wykryciu błędu do momentu jego usunięcia,
-powinny posiadać specjalną dedykowaną funkcję resetu
wejściowego i nie powinny pozwolić na samoczynny reset
układu po powrocie ciśnienia zasilającego.

Kategorie bezpieczeństwa
Kategorie bezpieczeństwa tworzą układ odniesienia dla
określenia koniecznego w danym przypadku poziomu
bezpiecznego dla maszyny lub konkretnej jej części lub
sekcji.
Kategorie bezpieczeństwa maszyny zostały
zdefiniowane w normie PN-EN 954-1.
Norma PN-EN 954-1:2001 wyróżnia pięć kategorii
bezpieczeństwa ( kategoria B, 1, 2, 3 i 4) i precyzuje
wymagania dotyczące każdej z nich w rozdziale 6.2.

Kategoria B
Związane z bezpieczeństwem elementy systemu
sterowania powinny być zaprojektowane, dobrane,
zbudowane i zestawione oraz zmontowane w sposób
zgodny ze stosownymi normami i zaleceniami producentów,
z zachowaniem podstawowych zasad bezpieczeństwa dla
określonego zastosowania.
Elementy muszą sprostać spodziewanym narażeniom
pracy, wpływom użytych materiałów technologicznych, jak
np. smary, środki myjące itd. oraz wpływom znaczących
czynników zewnętrznych jak drgania, czy pola
elektromagnetyczne.
W przypadku każdej wymienionej niżej, wyższej
kategorii bezpieczeństwa, wymagania kategorii B muszą
zostać spełnione, wraz z wymaganiami specyficznymi dla
danej kategorii.

Kategoria bezpieczeństwa 1
Wymagania
Muszą być spełnione wymagania kategorii bezpieczeństwa
B.
Muszą być stosowane zatwierdzone podzespoły i zasady
bezpieczeństwa.
Zachowanie systemu: wystąpienie błędu może
doprowadzić do utraty funkcji bezpieczeństwa.
Prawdopodobieństwo wystąpienia błędu niższe niż dla kat.
B
Podstawy osiągnięcia bezpieczeństwa: przez dobór
odpowiednich składników oraz właściwą instalacje (zasady
bezpieczeństwa).
Kategoria 1 bezpieczeństwa
Elementy spełniające wymagania 1 kategorii
bezpieczeństwa powinny być budowane na bazie
wypróbowanych elementów składowych i przy
wykorzystaniu sprawdzonych zasad bezpieczeństwa.
Przez wypróbowane elementy należy rozumieć:
- powszechnie używane w przeszłości,
- wytwarzane według sprawdzonych zasad.
Elementy są uznawane za „wypróbowane”, jeśli były z
powodzeniem wykorzystywane w wielu podobnych
zastosowaniach. Nowe elementy bezpieczeństwa są
uznawane za wypróbowane, jeśli są zaprojektowane
zgodnie z odnośnymi normami, a zgodność ta została
potwierdzona.

Kategoria 2 bezpieczeństwa
Podobnie jak w przypadku kategorii 1, konieczne jest
spełnienie wymagań kategorii B, a ponadto należy
zagwarantować, że funkcja bezpieczeństwa jest
sprawdzana (kontrolowana) w trybie automatycznym lub
ręcznym przez system sterowania maszyny.
Sprawdzanie powinno być przeprowadzane w
następujących sytuacjach:
- podczas uruchamiania maszyny,
- przed wystąpieniem każdej sytuacji niebezpiecznej,
- okresowo w czasie pracy, gdy jest to konieczne (ze
względu na rodzaj pracy lub ocenę ryzyka).

3 kategoria bezpieczeństwa
Oprócz konieczności spełnienia wymagań dla
podstawowej kategorii bezpieczeństwa B oraz stosowania
wypróbowanych zasad bezpieczeństwa, kategoria 3
wymaga udanego działania funkcji bezpieczeństwa przy
obecności pojedynczego defektu. Gdy jest to rozsądne
praktycznie, defekt powinien być wykryty w momencie lub
przed kolejnym przywołaniem funkcji bezpieczeństwa.
Może jednak się zdarzyć, że utrata funkcji
bezpieczeństwa zostanie spowodowana przez kumulację
niewykrytych defektów
.

4 kategoria bezpieczeństwa
Podobnie jak kategoria 3, również kategoria 4 wymaga,
aby system bezpieczeństwa spełniał wymagania kategorii
B, używał zasad bezpieczeństwa i wykonywał funkcję
bezpieczeństwa w obecności pojedynczego defektu. W
przeciwieństwie do kategorii 3, gdzie kumulacja defektów
może prowadzić do utraty funkcji bezpieczeństwa,
kategoria 4 wymaga wykonania funkcji bezpieczeństwa
przy kumulacji defektów.
Kumulacja defektów dotyczy najczęściej wystąpienia 2
defektów, ale w niektórych systemach należy uwzględniać
3 defekty.

Problemy niezawodności układów
pneumatycznych
Zapewnienie niezawodności sterowania układów płynowych
nie polega na odtworzeniu bezpiecznych układów sterujących
elektrycznych. Przykładowo, zwykła redundancja w układach
pneumatycznych wymaga zastosowania czterech rozdzielaczy
a nie dwóch styczników jak w układach elektrycznych. Dwa z
tych zaworów odpowiadają za bezpieczne zasilanie
pneumatyczne, natomiast dwa pozostałe za bezpieczne
zatrzymywanie (rozładowanie energii).
W wielu nieprofesjonalnie zaprojektowanych układach
pneumatycznych ryzyko istnieje w postaci ukrytych
potencjalnych przepływów. Dobrym przykładem na tą sytuację
są połączenia chwilowe rozdzielaczy występujące w
momentach przesterowań, które nie są przedstawiane na
schematach obwodów sterujących.

Typowe błędy elementów pneumatycznych
Na bezpieczeństwo układów pneumatycznych
wpływają najczęściej dwie sytuacje. Pierwsza sytuacja
dotyczy zablokowania suwaka zaworu w pozycji otwartej lub
zamkniętej. (brak reakcji na sygnały sterujące).
Druga niebezpieczna sytuacja powstaje, gdy czas
przesterowanie suwaka zaworu ulega znacznemu
wydłużeniu. Sytuacja taka może skutkować błędnymi
położeniami elementów wykonawczych.
Norma ANSI B11.19- 2003 zaleca system monitoringu
w celu wykrywania tych sytuacji w zastosowaniach
niebezpiecznych. Łatwym rozwiązaniem jest zastosowanie
elementów z wbudowanymi czujnikami wskazującymi
położenie suwaka w celu wykrywania omówionych powyżej
błędów zadziałania.

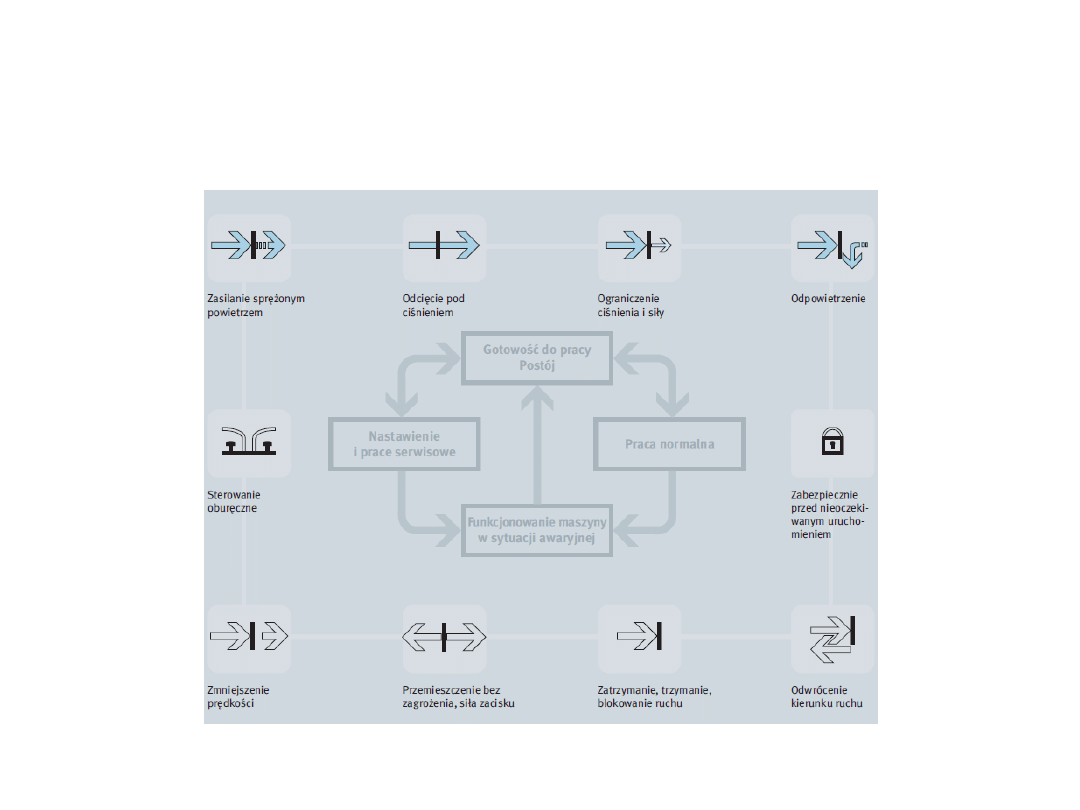
4 podstawowe stany maszyny
W eksploatacji maszyny można wyróżnić 4 stany:
-gotowość do pracy/ postój,
-praca normalna,
-nastawianie i prace serwisowe,
-funkcjonowanie maszyny w sytuacji awaryjnej.

Funkcje bezpieczeństwa
W wymienionych stanach w napędowych i sterujących
układach pneumatycznych mogą być realizowane określone
funkcje bezpieczeństwa:
-zasilanie sprężonym powietrzem,
-odcięcie pod ciśnieniem,
-ograniczenie ciśnienia i siły,
-odpowietrzenie części instalacji,
-sterowanie oburęczne,
-zabezpieczenie przed nieoczekiwanym uruchomieniem,
-zmniejszenie prędkości,
-brak siły,
-zatrzymanie, trzymanie, blokowanie ruchu,
-odwrócenie kierunku ruchu.
Funkcje bezpieczeństwa występujące w
napędach i sterowaniach pneumatycznych

Zasilanie sprężonym powietrzem
Gwałtowny wzrost ciśnienia w układzie
pneumatycznym jest zjawiskiem niepożądanym. W celu
minimalizacji tego zjawiska stosuje się zawory wolnego
startu, jak np. HEL (rys. poniżej) firmy Festo instalowane w
stacjach przygotowania powietrza.
Zastosowanie
takiego rozwiązania cechuje:
1) powolny powrót napędów pneumatycznych do pozycji
wyjściowych,
2)uniknięcie gwałtownych i nieprzewidywalnych ruchów
zespołów i części maszyn.
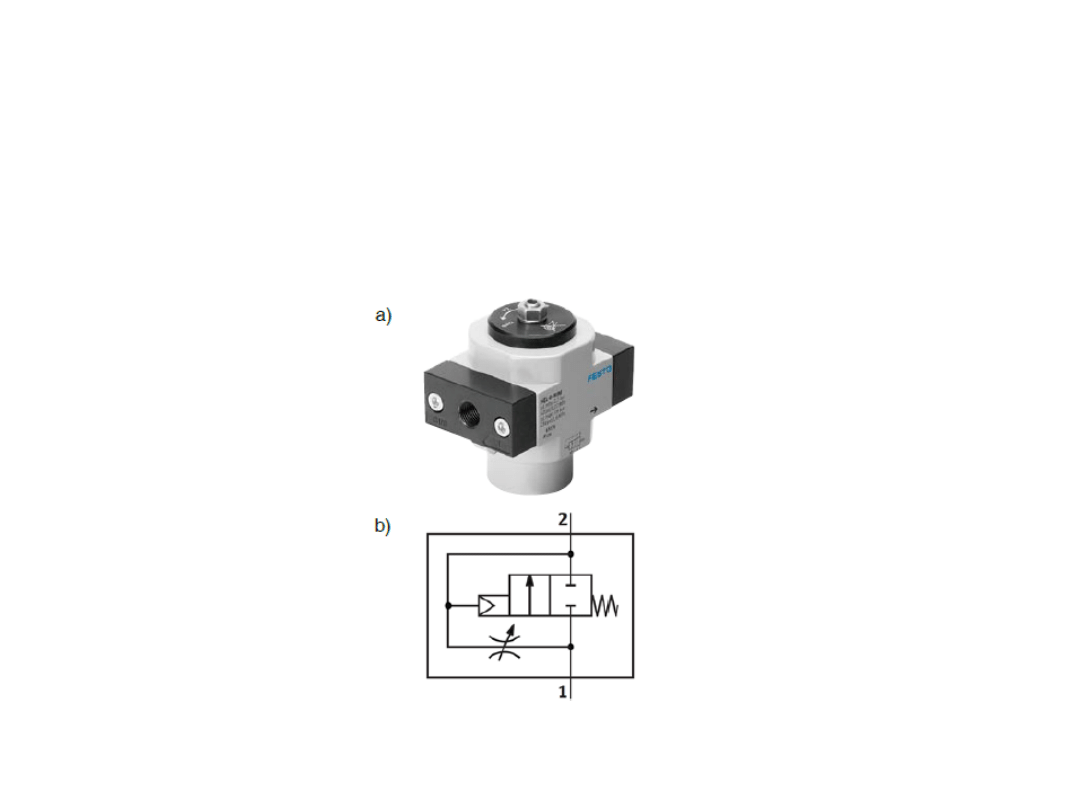
Zasilanie sprężonym powietrzem
(a) Zawór wolnego startu HEL, (b) schemat pneumatyczny
zaworu
Ograniczenie ciśnienia i siły
Wartość generowanej przez napędy pneumatyczne siły
zależy bezpośrednio od wartości ciśnienia powietrza
zasilającego.
Niejednokrotnie w sytuacjach awaryjnych nie jest
wymagane całkowite zaprzestanie pracy napędów
pneumatycznych, a jedynie zmniejszenie generowanej
przez nie siły. W takiej sytuacji idealnie nadaje się zawór
redukcyjny ciśnienia z dwoma jego stopniami serii
LR-D-MINI (rys. poniżej). Wybór wartości ciśnienia,
nastawianego mechanicznie, dokonuje się za pomocą
sygnału elektrycznego.
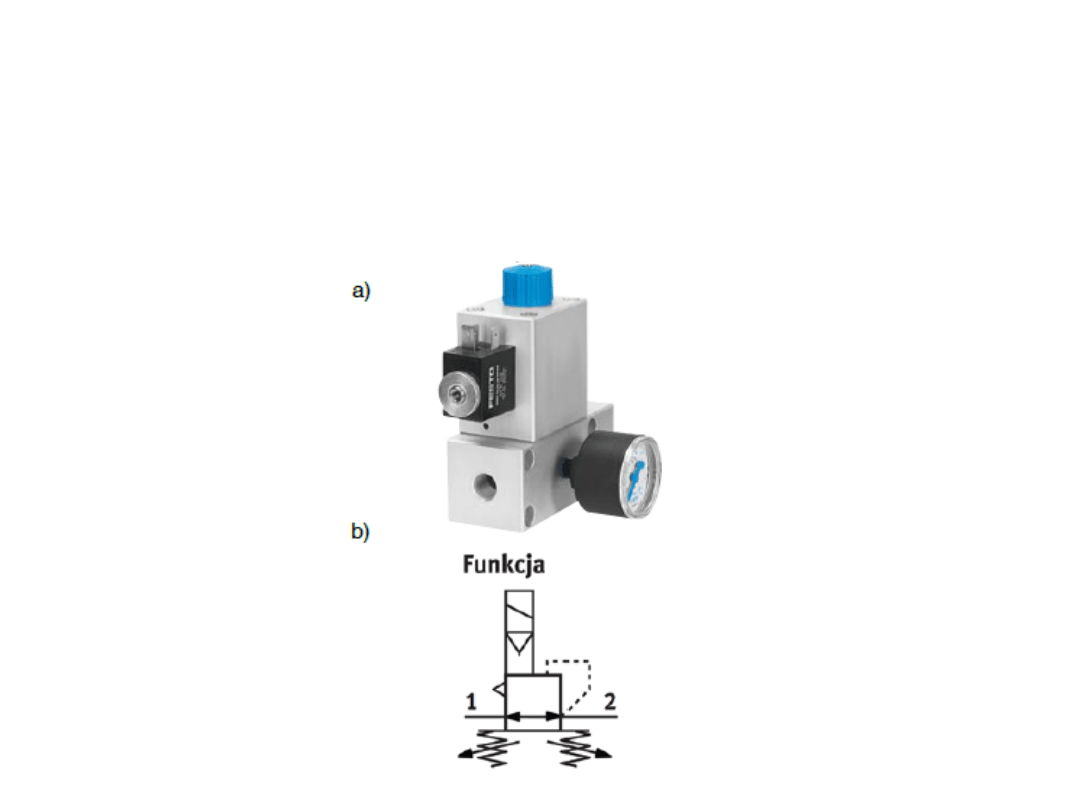
Ograniczenie ciśnienia i siły
(a) Dwustopniowy regulator ciśnienia LR-D-MINI, (b) symbol
regulatora

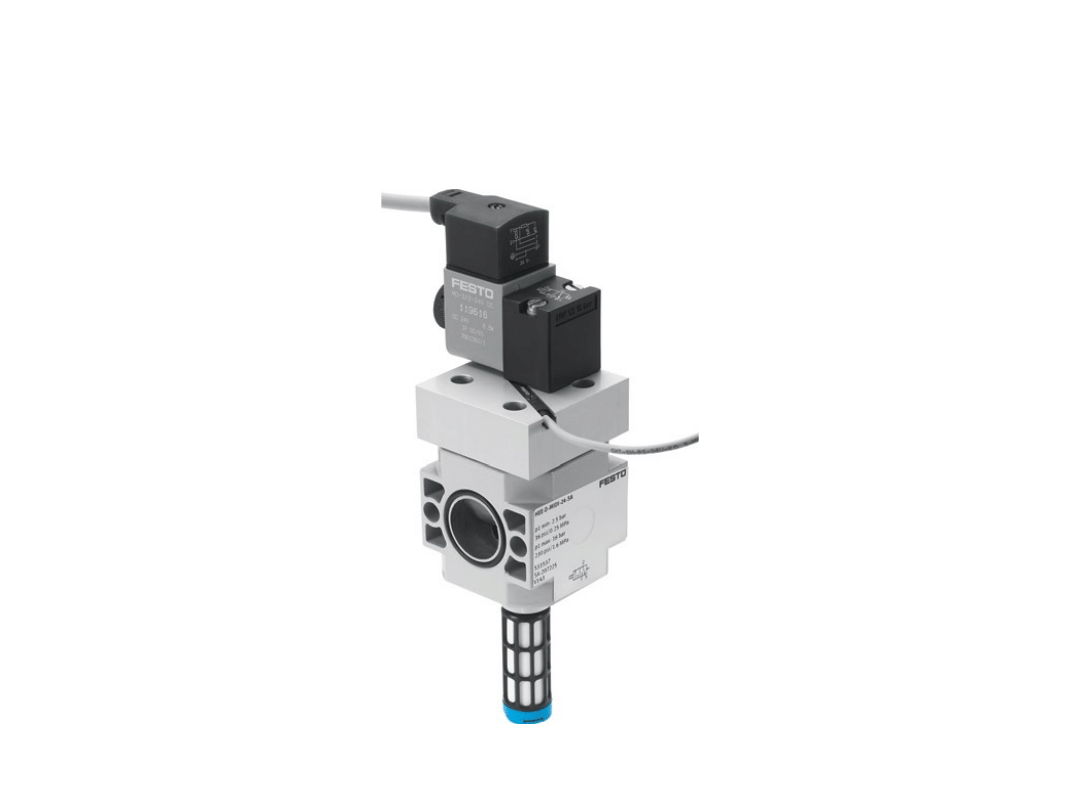
Odpowietrzenie
Jednym z najczęściej stosowanych rozwiązań w
przypadku konieczności zatrzymania awaryjnego maszyny
jest „odebranie” energii z urządzenia. W odniesieniu do
pneumatyki oznacza to odpowietrzenie (przy założeniu, że
nie spowoduje to wzrostu zagrożenia ze względu na
niekontrolowane ruchy elementów urządzenia pod
wpływem sił grawitacji i bezwładności).
Dla zwiększenia pewności poprawnego wykonania tej
czynności, firma Festo oferuje zawór odcinająco-
odpowietrzający z kontrolą położenia suwaka.
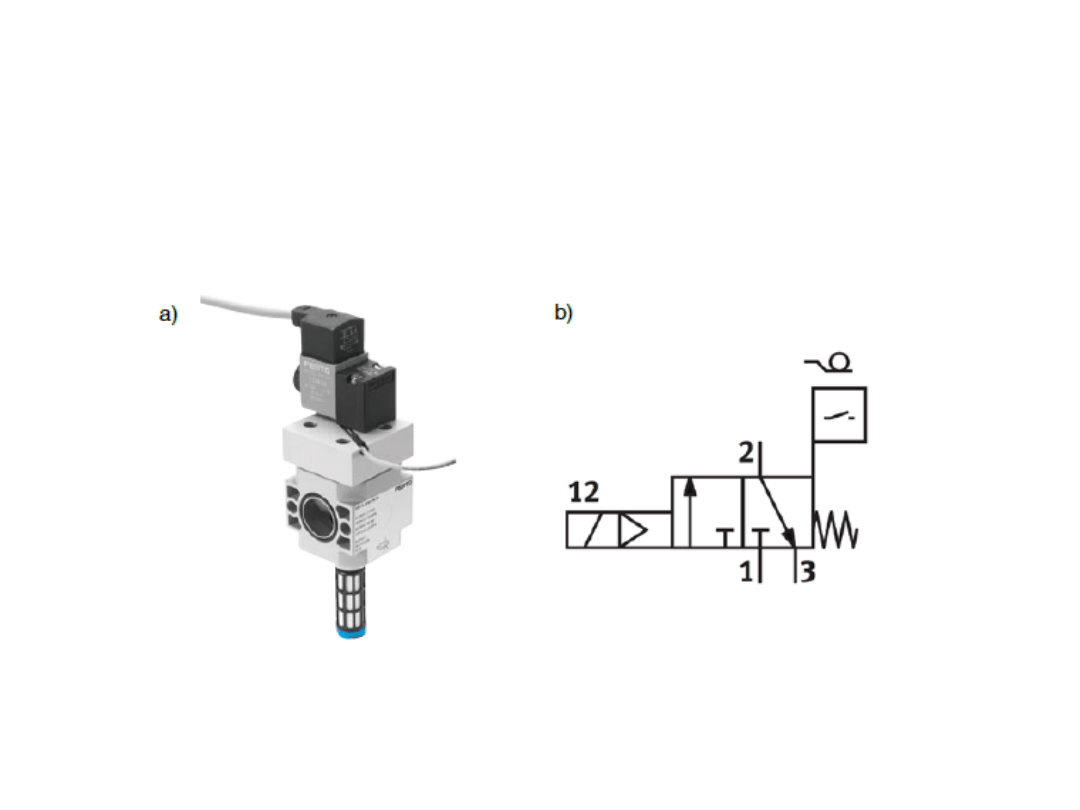
Odpowietrzenie
(a) Zawór odpowietrzający z kontrolą położenia suwaka, (b)
symbol zaworu

Sterowanie oburęczne
Blok sterowania oburęcznego (rys. poniżej) znajduje
zastosowanie wszędzie tam, gdzie konieczne jest
wymuszenie obsługi urządzenia przez użycie obu rąk przy
starcie. Ciągły wyjściowy sygnał pneumatyczny jest
generowany wyłącznie wtedy, kiedy na obu wejściach
pojawiają się sygnały pneumatyczne wejściowe z różnicą
czasową od 0,2 do 0,5 s. W sytuacji zaniku jednego z
sygnałów wejściowych następuje natychmiastowy zanik
sygnału wyjściowego sterującego urządzeniem.
Ponadto po każdym cyklu pracy musi nastąpić
całkowity zanik obydwu sygnałów wejściowych. Takie
rozwiązanie eliminuje sytuacje świadomego blokowania
jednego z przycisków sterowania oburęcznego, w celu
wymuszenia sterowania wyłącznie jednym sygnałem
wejściowym.
Sterowanie oburęczne
(a) Blok sterowania oburęcznego, (b) schemat
pneumatyczny bloku sterowania oburęcznego

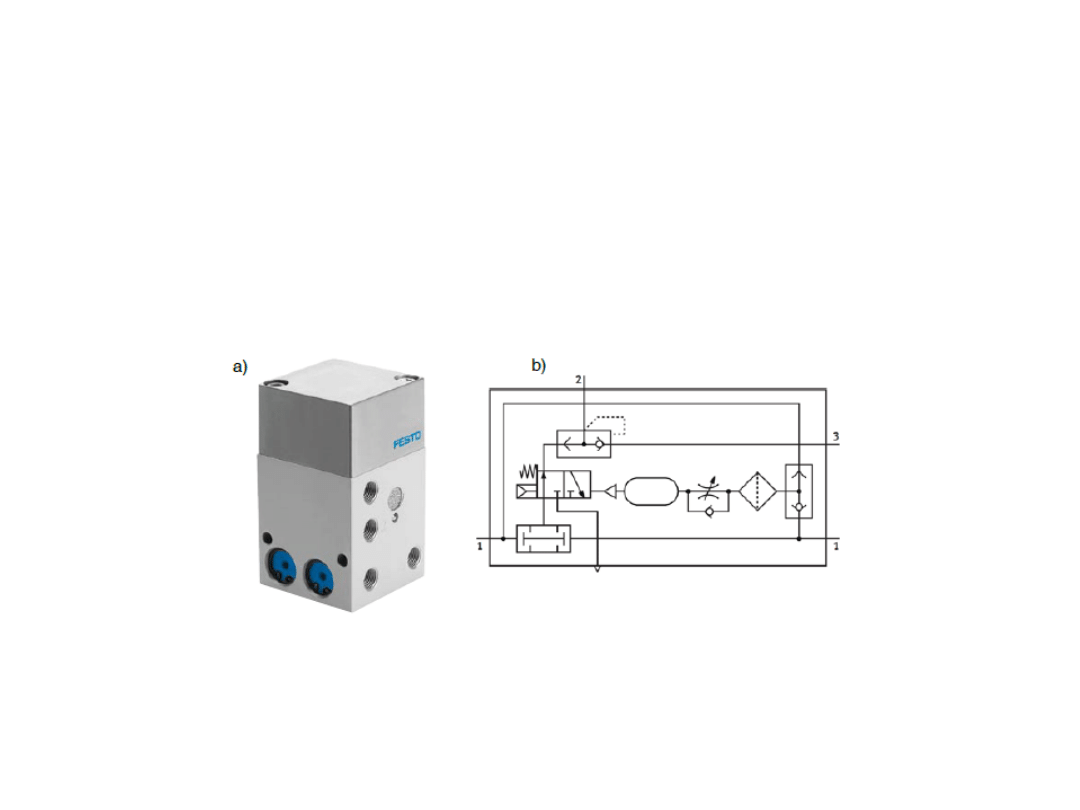
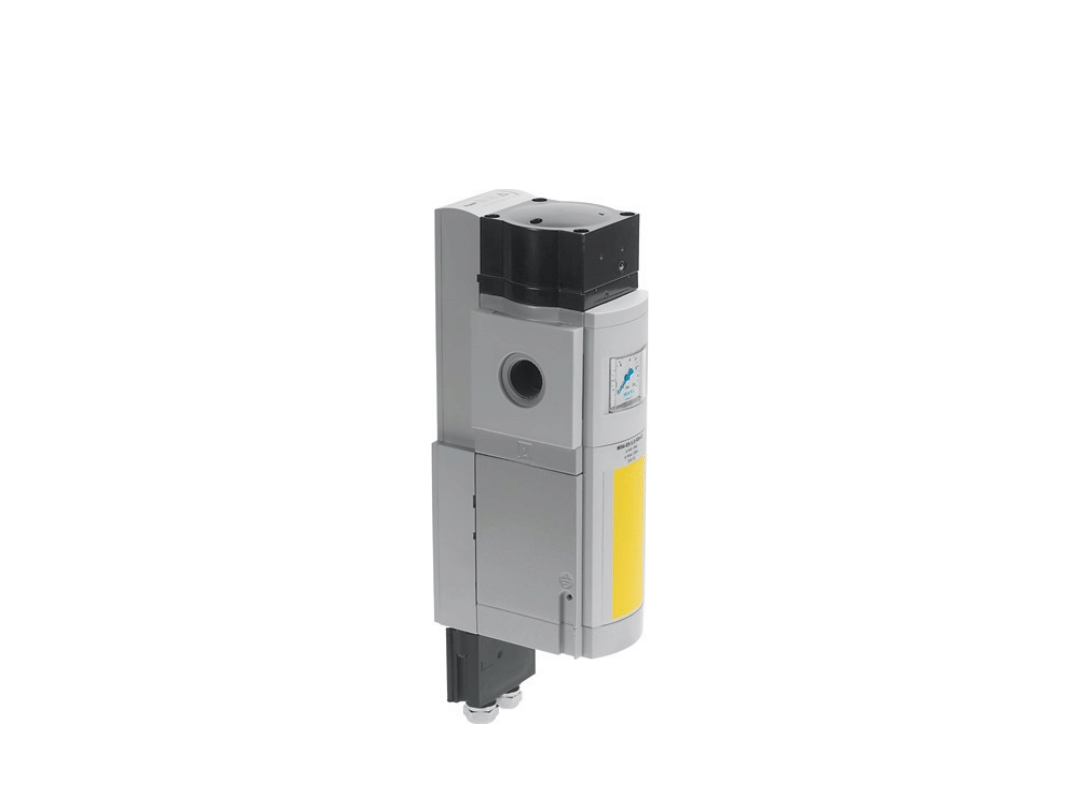
Zabezpieczenie przed
nieoczekiwanym uruchomieniem
Wykonywanie różnego rodzaju prac konserwacyjnych i
serwisowych wymaga pewnego zabezpieczenia urządzeń
przed nieoczekiwanym uruchomieniem. Taką funkcję może
pełnić zawór załączający z funkcją odcięcia i odpowietrzenia
układu (rys. poniżej). W stanie zamkniętym (instalacja
odpowietrzona) możliwe jest założenie do sześciu
mechanicznych blokad otwarcia (kłódek pracowników służb
remontowych). Dzięki temu, maszyna może zostać
uruchomiona, dopiero w momencie gdy wszyscy serwisanci
zakończą swoją pracę – zdejmą kłódki.
Zabezpieczenie przed
nieoczekiwanym uruchomieniem
(a) Zawór załączający, (b) symbol zaworu

Zatrzymanie, trzymanie, blokowanie
ruchu
Ze względu na występowanie sił grawitacji i
bezwładności, odpowietrzenie układu w sytuacji awaryjnej
może być niewystarczające dla zatrzymania ruchu napędów
pneumatycznych.
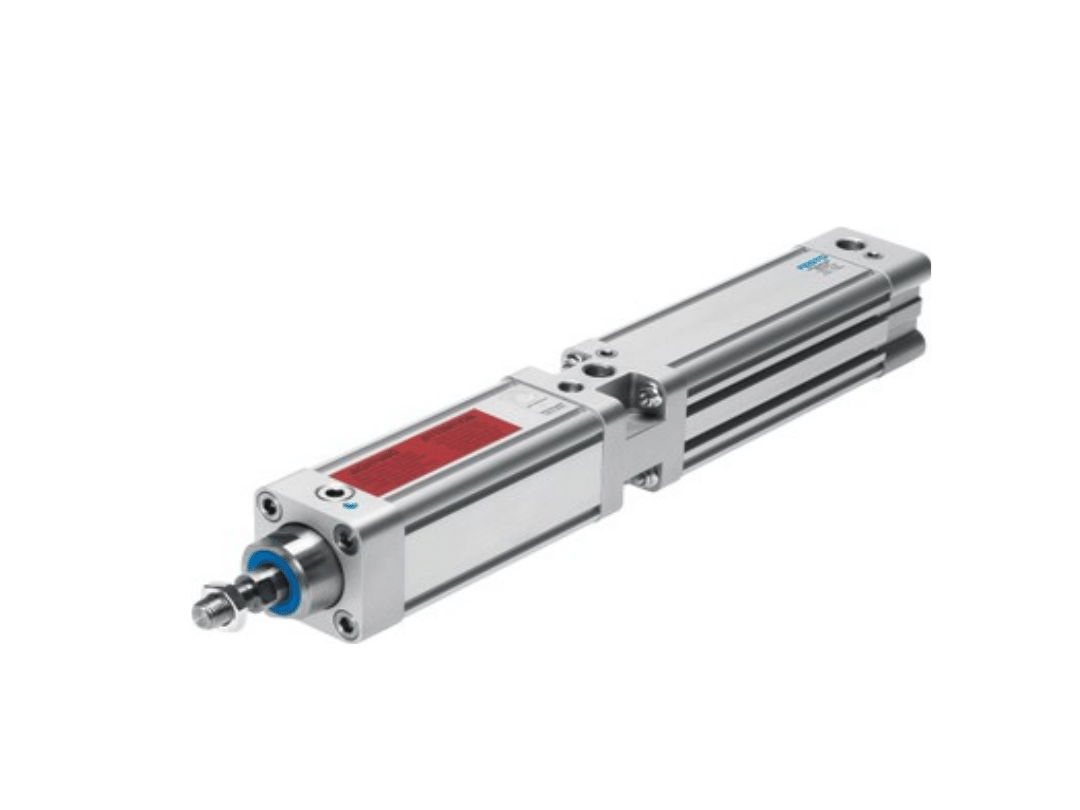
Rozwiązaniem tej niedogodności jest siłownik z
wbudowaną głowicą zaciskową (rys. poniżej). Głowica
zatrzymuje w sposób mechaniczny ruch tłoczyska w
dowolnym położeniu w przypadku zaniku ciśnienia
sprężonego powietrza. Tłoczysko jest odblokowywane przy
podaniu ciśnienia do głowicy zaciskowej.
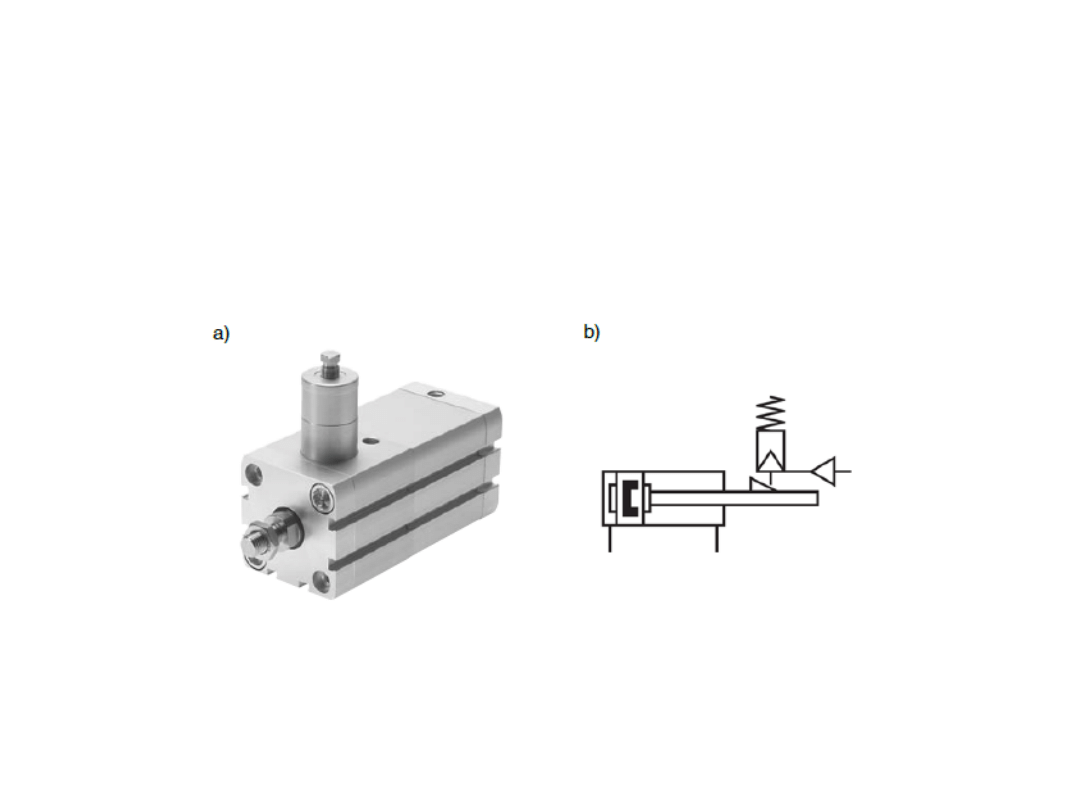
(a) Siłownik ze zintegrowaną głowicą zaciskową, (b)
symbol siłownika z głowicą zaciskową
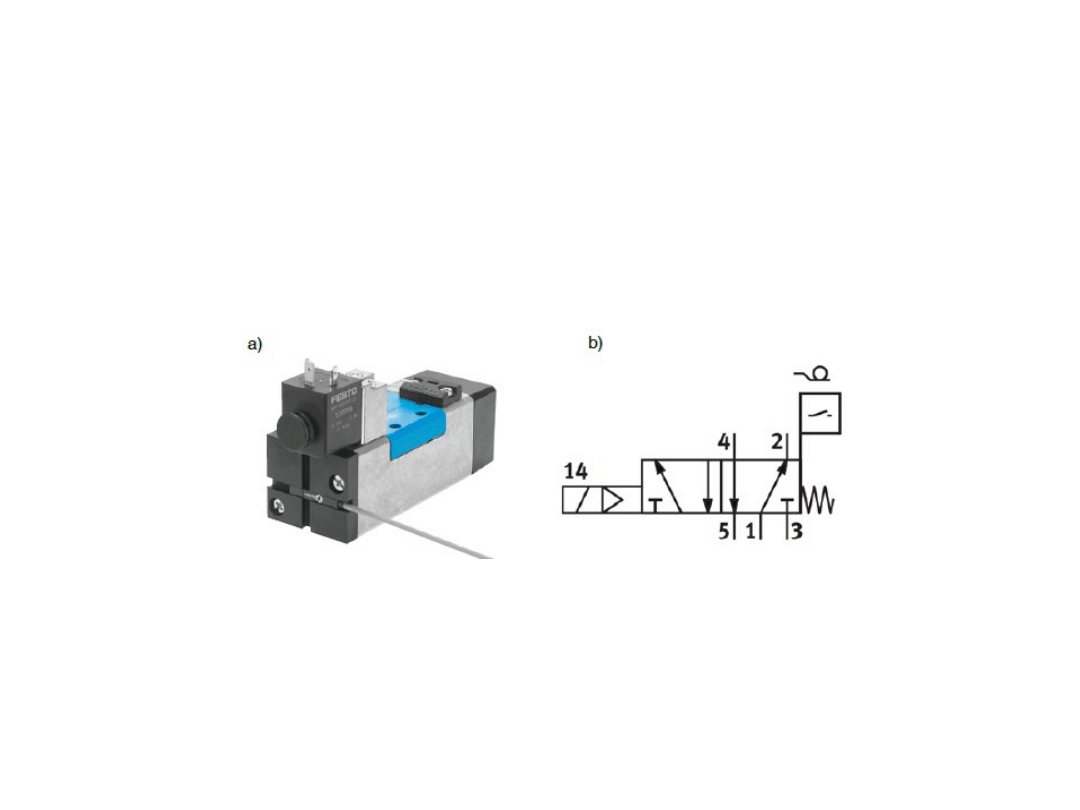
Zawory monitorowane
(a) Zawór z czujnikiem położenia suwaka, (b) symbol
zaworu z kontrolą położenia suwaka
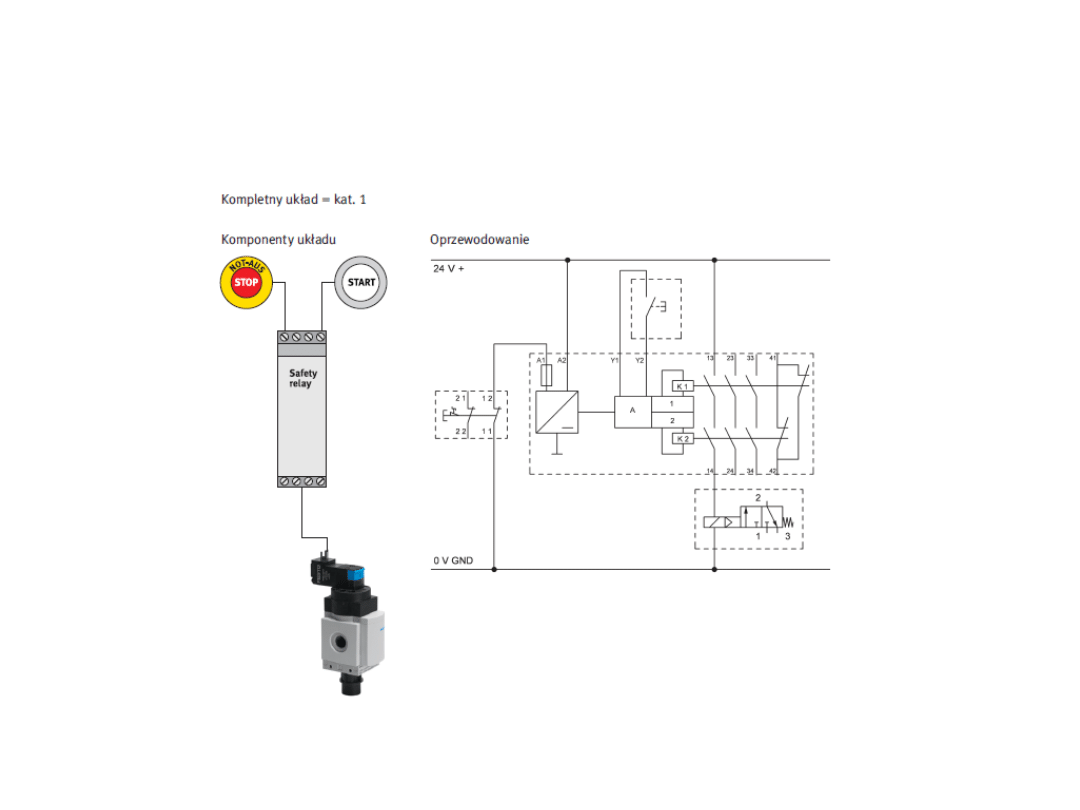
Układ realizujący w kategorii 1 funkcję
bezpieczeństwa – odpowietrzanie

Układ realizujący w kategorii 1 funkcję
bezpieczeństwa – odpowietrzanie
Dwupołożeniowy rozdzielacz pneumatyczny w stanie
beznapięciowym cewki (schemat powyżej) łączy zasilany
układ pneumatyczny (odpowiednią komorę) z atmosferą. W
układzie nie występuje ciśnienie. Podanie sygnału
elektrycznego na cewkę zaworu powinno spowodować
przesterowanie rozdzielacza i wytworzenie ciśnienia w
układzie. Zanik napięcia sterującego powinien spowodować
odpowietrzenie układu. Sterujący układ elektryczny jest
wyższej kategorii bezpieczeństwa niż układ pneumatyczny.
Awaria zaworu pneumatycznego prowadzi do zaniku
realizowanej funkcji bezpieczeństwa.
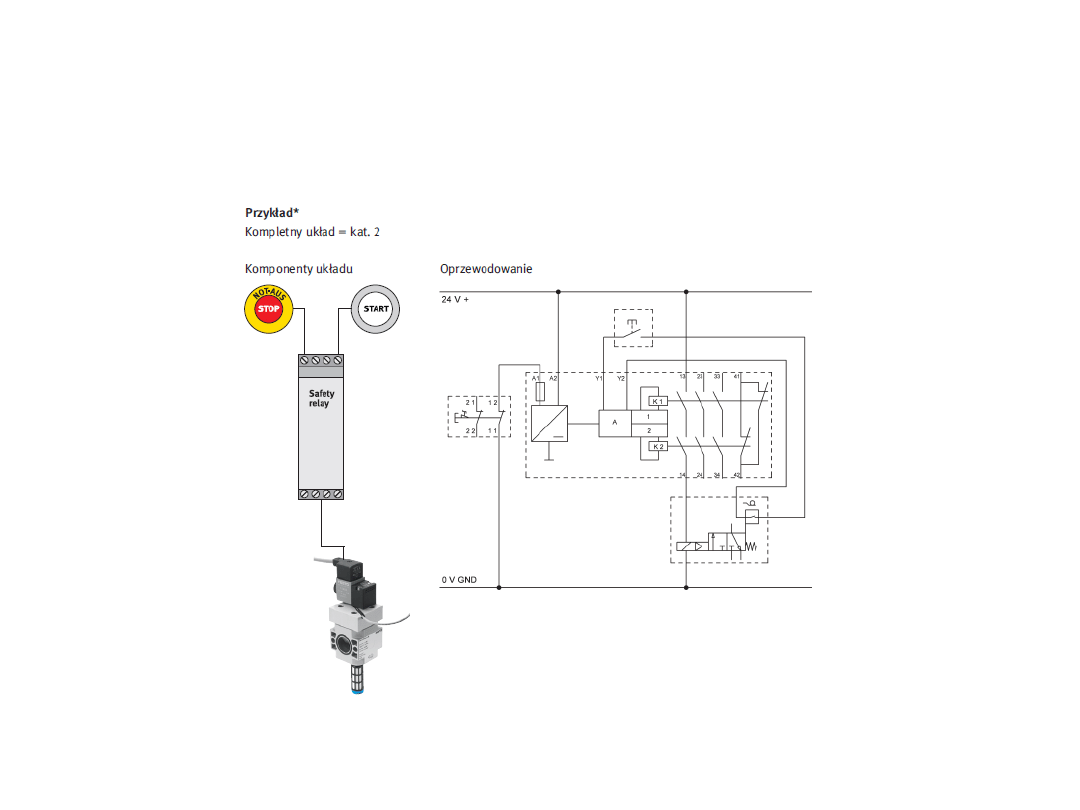
Układ realizujący w kategorii 2 funkcję
bezpieczeństwa – odpowietrzanie

Układ realizujący w kategorii 2 funkcję
bezpieczeństwa – odpowietrzanie
Dwupołożeniowy rozdzielacz pneumatyczny w stanie
beznapięciowym cewki (schemat powyżej) łączy zasilany
układ pneumatyczny (odpowiednią komorę) z atmosferą. W
układzie nie występuje ciśnienie. Podanie sygnału
elektrycznego na cewkę zaworu powinno spowodować
przesterowanie rozdzielacza i wytworzenie ciśnienia w
układzie. Zanik napięcia sterującego powinien spowodować
odpowietrzenie układu. Prawidłowe położenie suwaka
zaworu jest testowane przed kolejnymi uruchomieniami
układu przez wykorzystanie czujnika położenia suwaka. W
przypadku stwierdzenia błędu położenia suwaka ruch
układu jest stopowany.
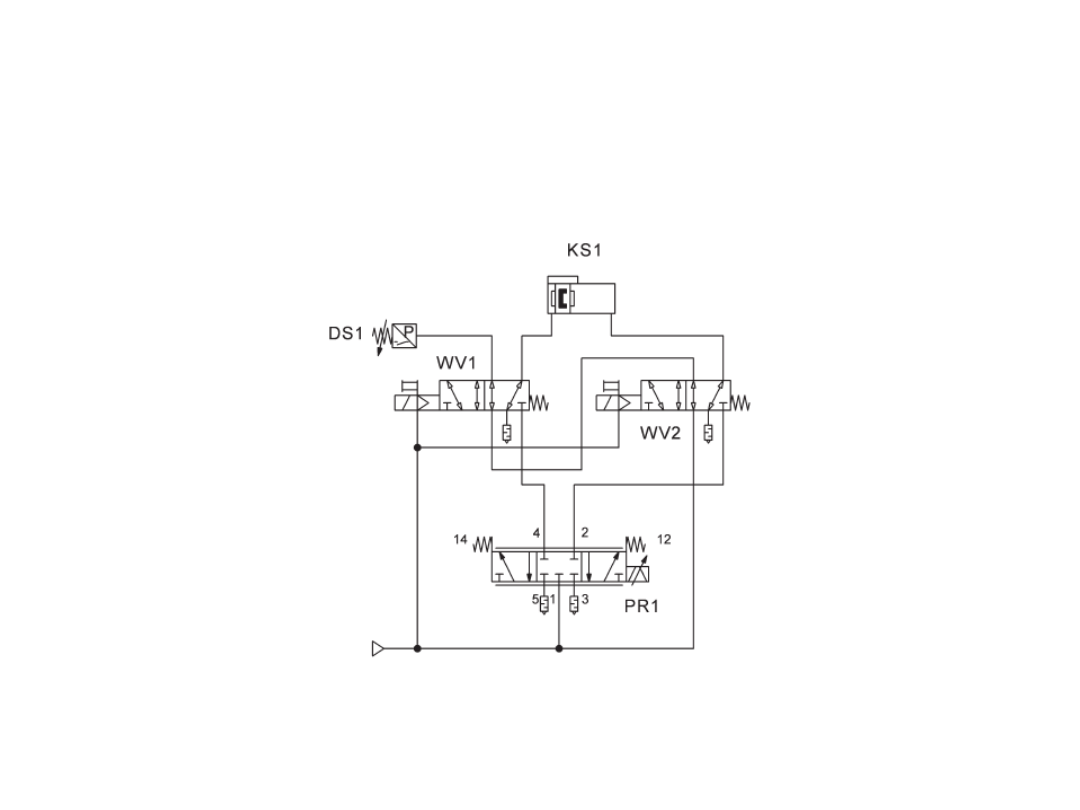
Układ sterowania oburęcznego,
kategoria 2

Układ sterowania oburęcznego,
kategoria 2
Blok sterowania oburęcznego ZSB-1/B jest elementem
logicznym typu I. Podanie ciśnienia na wejścia 11 i 12 w
odstępie czasu nie dłuższym niż 0,5 s wywołuje na
przyłączu 2 sygnał wyjściowy. Wysterowanie wejść realizują
dwa zawory 3/2 sterowane ręcznie z samoczynnym
powrotem. Jak długo przyciski obu zaworów są wciśnięte na
wyjściu 2 występuje ciśnienie. Po zwolnieniu jednego lub
dwóch przycisków na wyjściu 2 występuje zanik ciśnienia.
Układ sterowany jest odpowietrzony w kierunku od
przyłącza 2 do 3 bloku WV1.
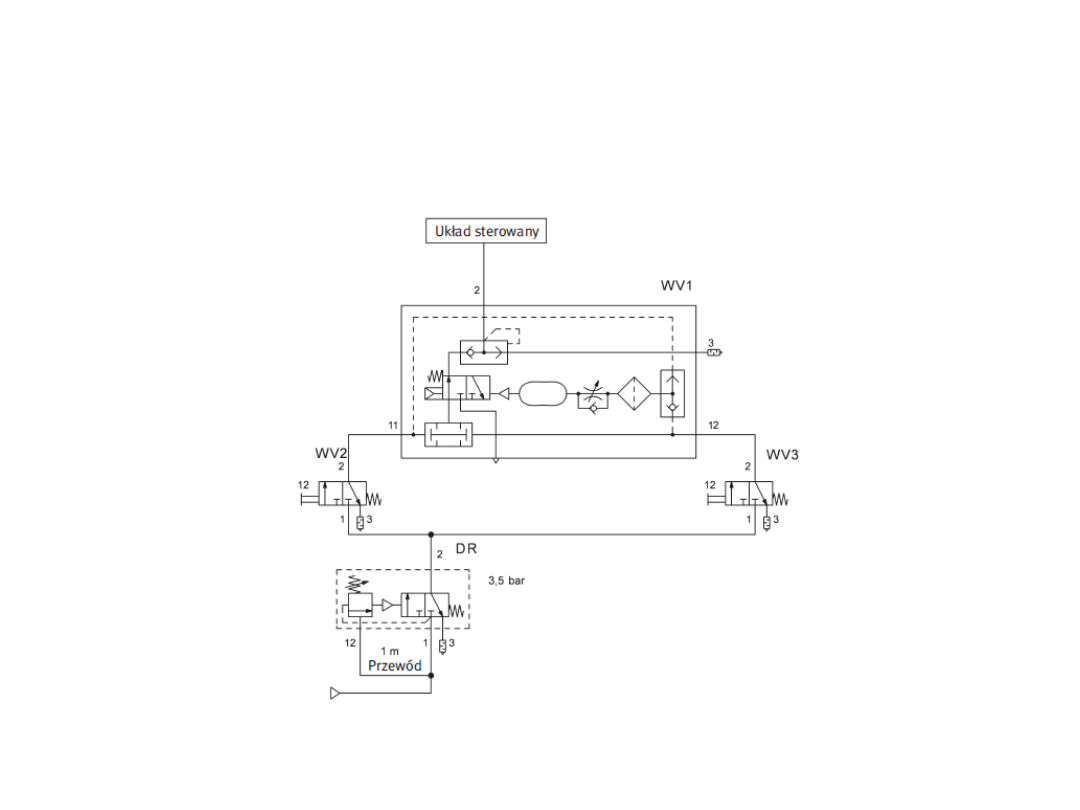
Układ realizujący w kategorii 3 funkcję
bezpieczeństwa – odpowietrzanie

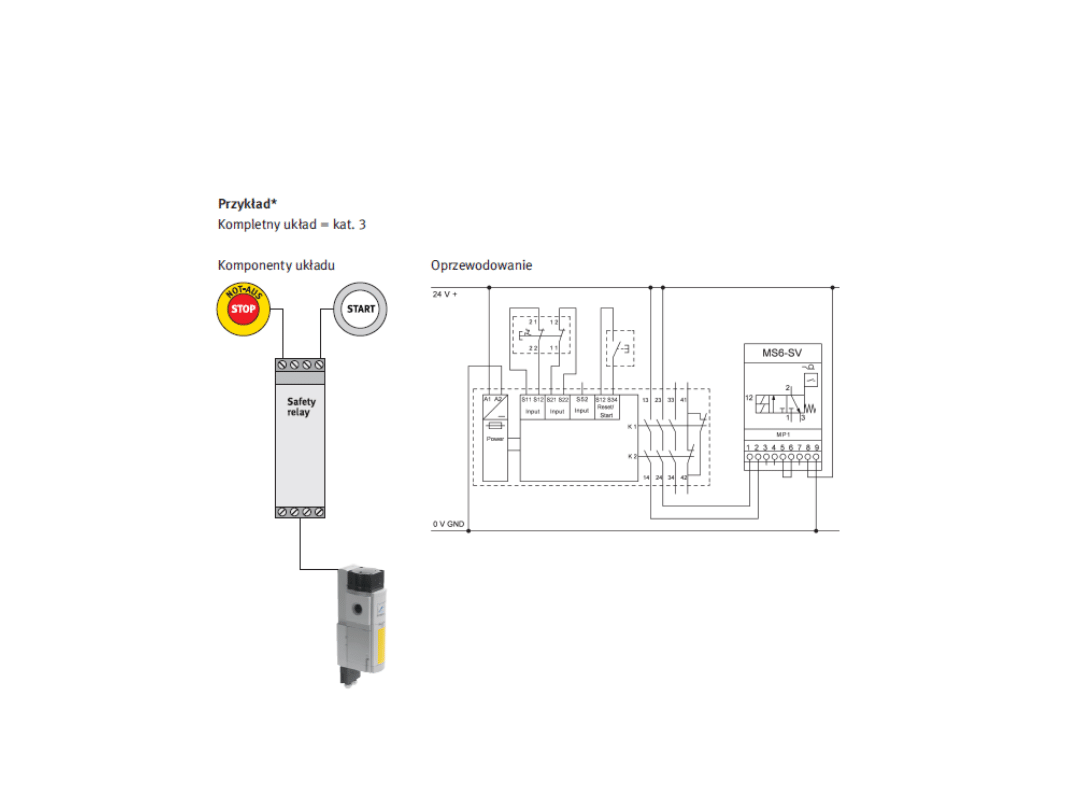
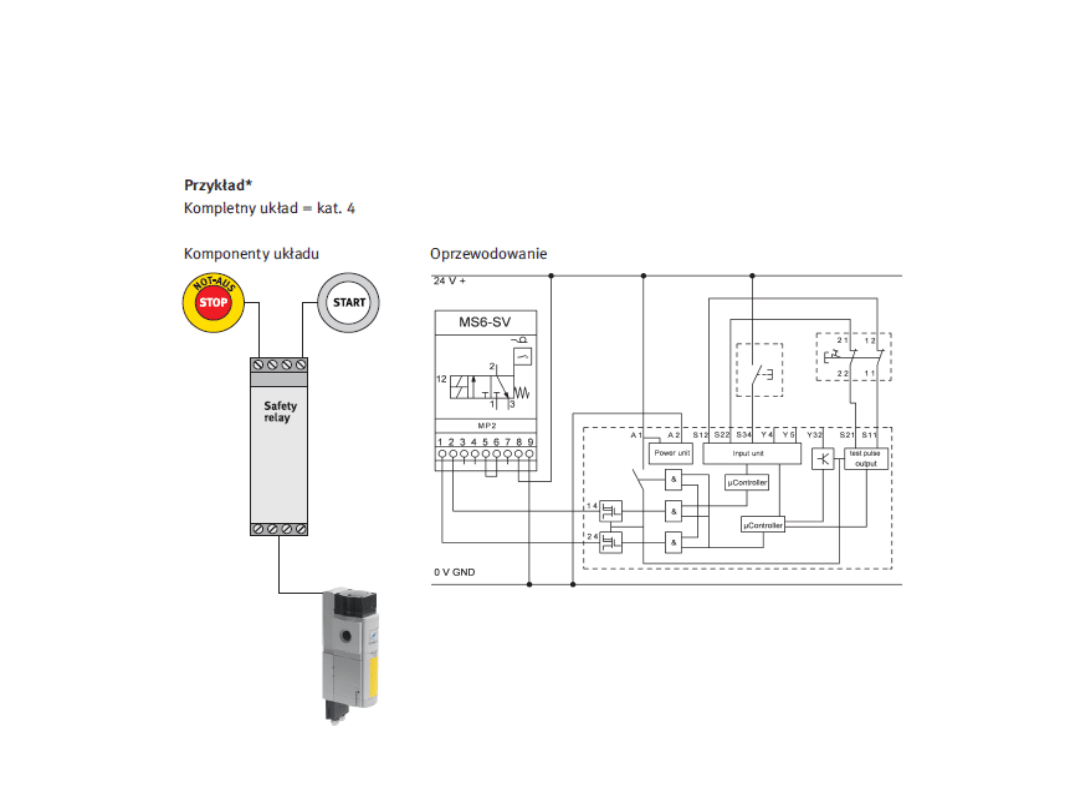
Zawór MS6-SV
W wypadku nagłego stanu awaryjnego tych części systemu,
które mają kluczowe znaczenie dla bezpieczeństwa, zawór
MS6-SV zapewnia szybkie i niezawodne odpowietrzenie
układu pneumatycznego.
Zawór MS6-SV to samotestujący się mechatroniczny układ
redundantny zgodny z wymaganiami normy PN-EN ISO
13849-1. Oznacza to, że niezawodne odpowietrzanie jest
zapewnione nawet jeżeli wystąpi uszkodzenie wewnątrz
zaworu.
Sprawdzenie bezpiecznego położenia tłoczka w zaworze jest
wykonane bezpośrednio przez zawór podczas
samotestowania. Oznacza to zmniejszenie skomplikowanego
okablowania upraszczającego całą instalację.
Bezpieczeństwo jest potwierdzone certyfikatem BG według
normy DIN-EN ISO 13849-1, kategoria 4, poziom zapewnienia
bezpieczeństwa "e".
Kompletny układ (wraz z elektroniką) spełnia wymagania
kategorii 3 bezpieczeństwa.
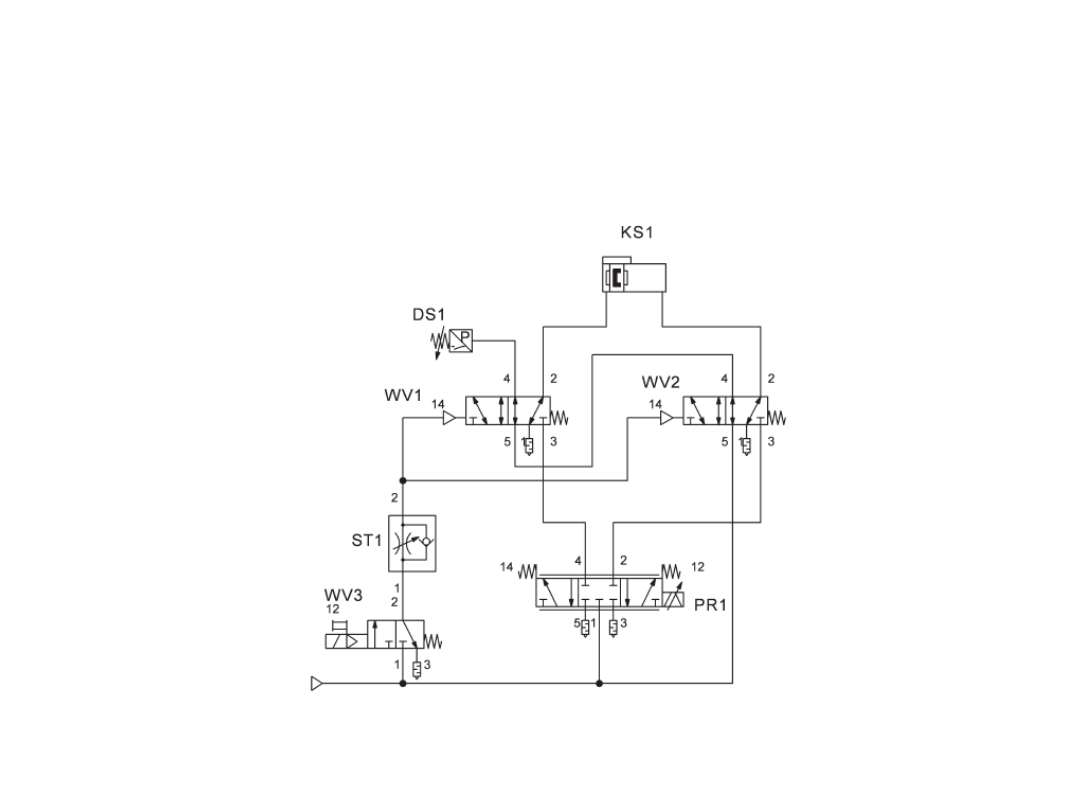
Funkcja bezpieczeństwa :odpowietrzanie,
kategoria 3
Funkcja bezpieczeństwa
:odpowietrzanie, kategoria 3
Podczas normalnej pracy siłownik sterowany jest
zaworami rozdzielającymi WV1 i WV2. Jeśli cewki zaworów
nie są pobudzone obie komory siłownika są odpowietrzone.
Aby moc wywołać wsunięcie lub wysunięcie tłoczyska
siłownika wymaga się podania ciśnienia na oba zawory
zwrotne przez zawór WV3. W tym wypadku zawory zwrotne
nie wpływają na funkcjonowanie układu. Jeśli nastąpi
odpowietrzenie (przez WV3) zaworów zwrotnych SP1 i SP2
spowoduje to również odpowietrzenie obu komór siłownika.
Należy uwzględnić, że otwarcie zaworów zwrotnych w
celu odpowietrzania siłownika wymaga różnicy ciśnień na
ich wlotach i wylotach. Aspekt ten musi być rozpatrzony
indywidualnie w zależności od zastosowania napędu.
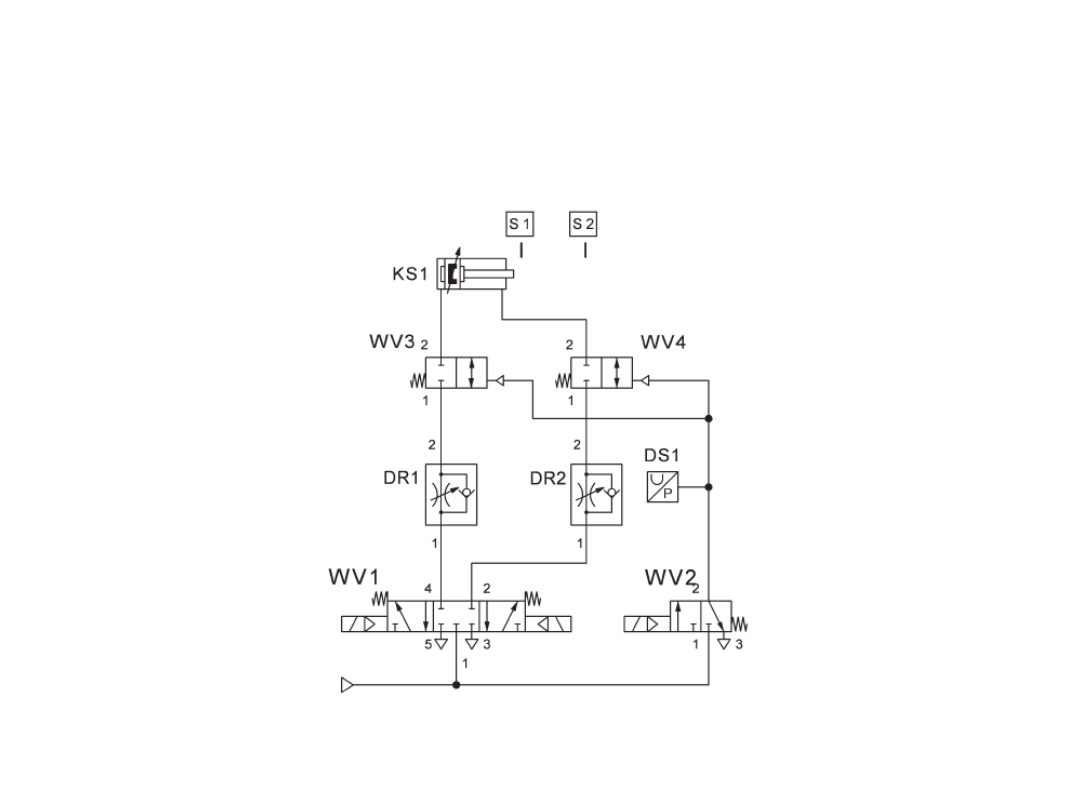
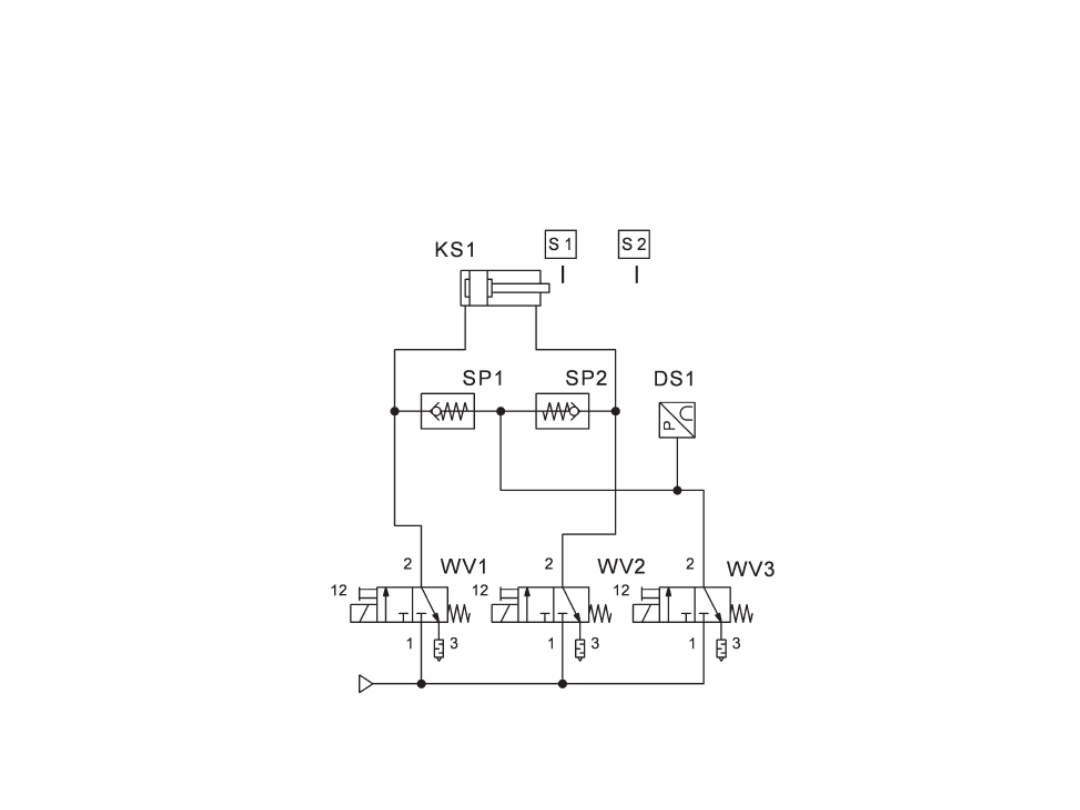
Sterowania położeniem siłownika, kategoria 3, układ
z redundancją.

Sterowania położeniem siłownika, kategoria
3, układ z redundancją
Siłownik może być zatrzymany przez działanie jednego
lub obu z dwóch kanałów pneumatycznego zatrzymania
(układ z redundancją). Kanał pierwszy tworzy zawór WV1.
W stanie niewysterowanym (położenie środkowe)
zawór odcina przepływ. Po wyłączeniu zasilania
elektrycznego cewek, sprężyny zaworu ustawiają go w
położeniu środkowym. Siłownik jest zatrzymany w sposób
pneumatyczny. Kanał drugi tworzą dwa zawory odcinające,
sterowane pneumatycznie WV3 i WV4 oraz zawór sterujący
WV2. Zawór WV2 w stanie niewysterowanym umożliwia
ustawienie dwóch zaworów odcinających WV3 i WV4 w
położenie zamykające przepływ. Siłownik jest zatrzymany w
sposób pneumatyczny.
Układ z mechanicznym i pneumatycznym
zatrzymaniem ruchu (kategoria 3)
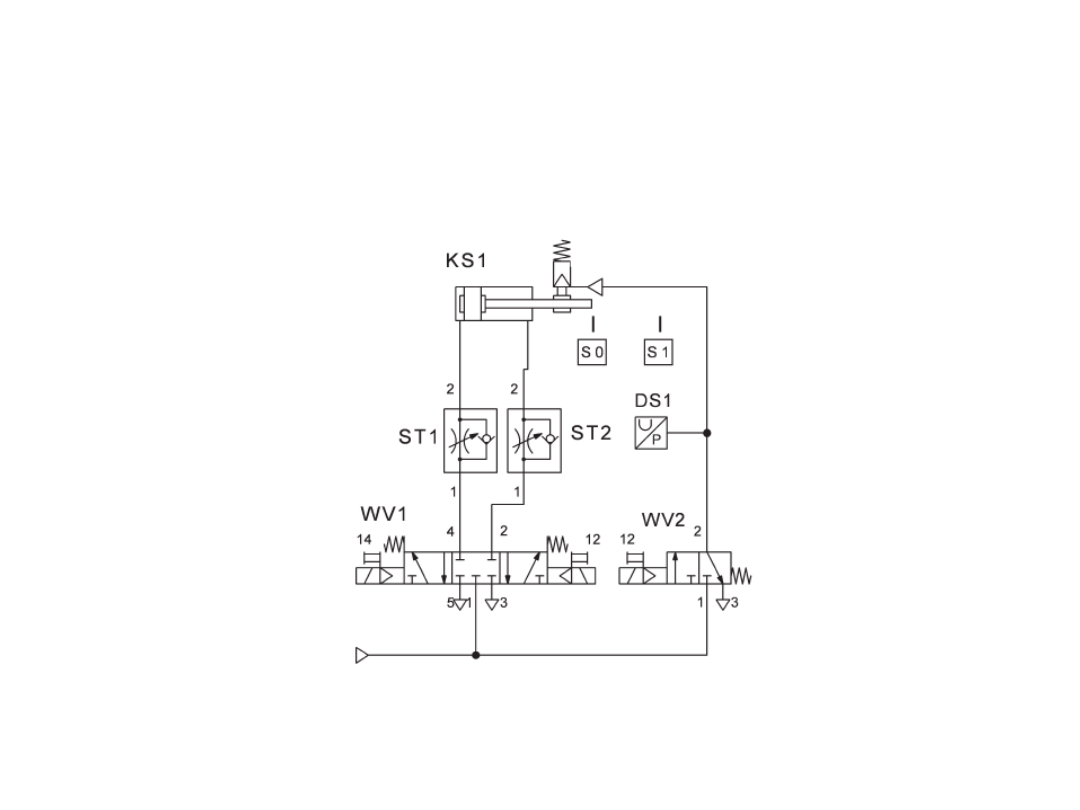
Układ z mechanicznym i
pneumatycznym zatrzymaniem ruchu
(kategoria 3)
Na rysunku powyżej przedstawiony jest układ z
mechanicznym i pneumatycznym zatrzymaniem ruchu.
Funkcja bezpieczeństwa „zatrzymanie ruchu” jest w tym
układzie realizowana pneumatycznie i mechanicznie
(dywersyfikacja).
Blokada mechaniczna jak i hamowanie pneumatyczne
działając oddzielnie są wystarczające do realizacji funkcji
bezpieczeństwa „zatrzymanie ruchu”. Przedstawiony układ
jest strukturą dwukanałową (redundancja). Kanał pierwszy
tworzy zawór WV1.
W położeniu środkowym (w stanie niewysterowanym) zawór
odcina przepływ i siłownik jest zatrzymany w sposób
pneumatyczny.
W kanale drugim hamulec mechaniczny jest sterowany
zaworem WV2. W stanie odpowietrzonym hamulec jest
zaktywizowany i blokuje przesuw tłoczyska, w sposób
mechaniczny.
Układ realizujący w kategorii 4 funkcję
bezpieczeństwa – odpowietrzanie
Schemat układu z zaworem proporcjonalnym
przepływu
Schemat układu z zaworem
proporcjonalnym przepływu
Układ przedstawiony powyżej służy do realizacji
następujących środków ochronnych:
-zabezpieczenie przed nieoczekiwanym uruchomieniem wg
PN-EN 1037 (konfiguracja dwukanałowa). Osiągalny poziom
zapewnienia bezpieczeństwa „d” wg PN-EN ISO 13849-1,
-środek ochronny „włączanie bez ciśnienia” wg PN-EN ISO
13849-1 (konfiguracja jednokanałowa). Osiągalny poziom
zapewnienia bezpieczeństwa „d” wg PN-EN ISO 138491,
-kategoria „0” funkcji stopu wg PN-EN 60204-1.
Schemat układu z zaworem
proporcjonalnym przepływu, odmienny
wariant

Schemat układu z zaworem proporcjonalnym
przepływu, odmienny wariant
Układ przedstawiony powyżej służy do zastosowania
następujących środków ochronnych:
-Zabezpieczenie przed nieoczekiwanym uruchomieniem wg
PN-EN 1037 (konfiguracja dwukanałowa). Osiągalny poziom
zapewnienia bezpieczeństwa „d” wg PN-EN ISO 13849-1.
-Środek ochronny „odpowietrzanie”, (konfiguracja
jednokanałowa wg PN-EN ISO 13849-1), Osiągalny poziom
zapewnienia bezpieczeństwa „d” wg PN-EN ISO 13849-1*.
-Kategoria „0” funkcji stopu wg PN-EN 60204-1.
-Funkcja bezpieczeństwa :Odpowietrzanie.
-Funkcja bezpieczeństwa :Zabezpieczenie przed
nieoczekiwanym uruchomieniem.
Głowica zaciskowa KEC-…-S

Głowica zaciskowa KEC-…-S
W odpowiedzi na przerwę w dopływie energii lub w
wypadku zaniku lub spadku ciśnienia, głowica zaciskowa
KEC-…-S zapewnia akcję hamowania w dokładnie
określonym zakresie tolerancji za pomocą elementu
zaciskającego ze sprężyną działającą na tłoczysko.
Komponenty te są stosowane w aplikacjach, w których
występują zmieniające się obciążenia, niezależne zmiany
działającego ciśnienia i stałe przecieki w układzie.
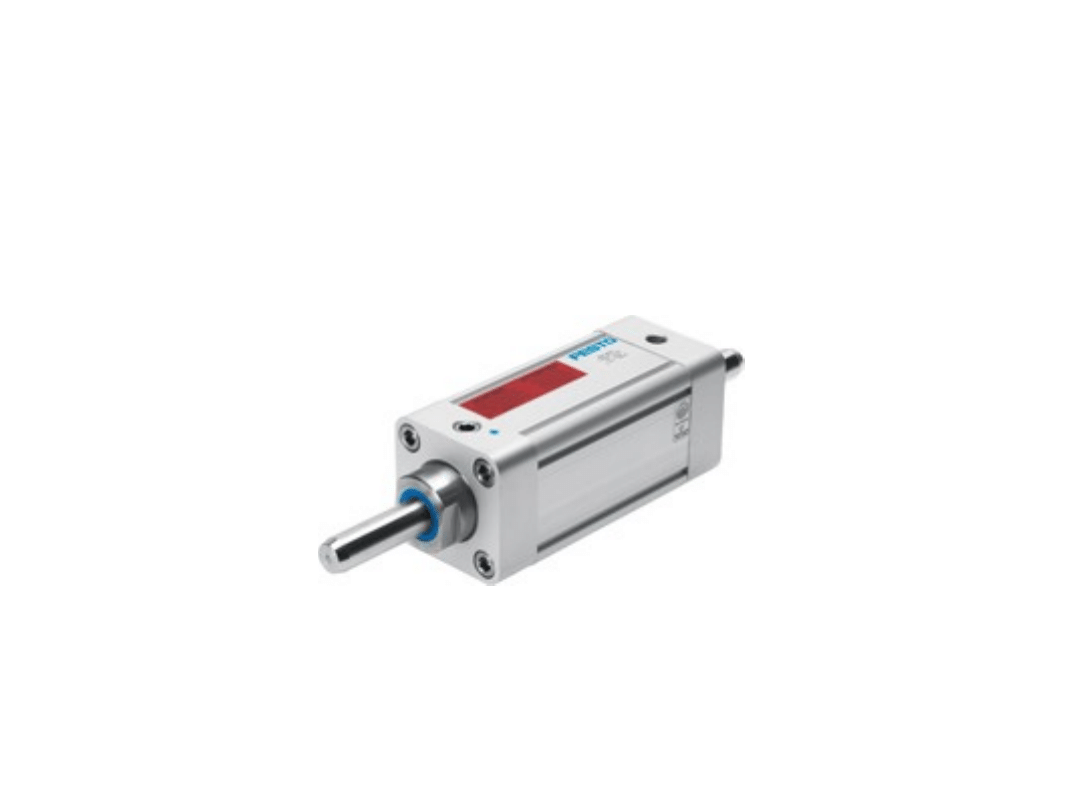
Siłownik z głowicą zaciskową DNCKE-S

Siłownik z głowicą zaciskową DNCKE-S
Siła trzymania głowicy zaciskowej jest większa niż
maksymalna dopuszczalna siła pchania. Do stosowania w
układach sterowania kategorii 1 wg PN-EN 954-1 („ część
wypróbowana”).
Użycie w układach wyższych kategorii wymaga
zastosowania dodatkowych technicznych środków
ochronnych
Zastosowanie:
-Jako urządzenie blokujące ruch (zastosowanie statyczne)
-unieruchomienie przy zaniku energii
-zabezpieczenie przed zanikiem i spadkiem ciśnienia
-blokowanie tłoczyska w położeniach pośrednich w celu
realizacji procesów roboczych
-Jako hamulec (zastosowanie dynamiczne) :zatrzymanie
ruchu, przerwanie ruchu po wkroczeniu w strefę zagrożenia.
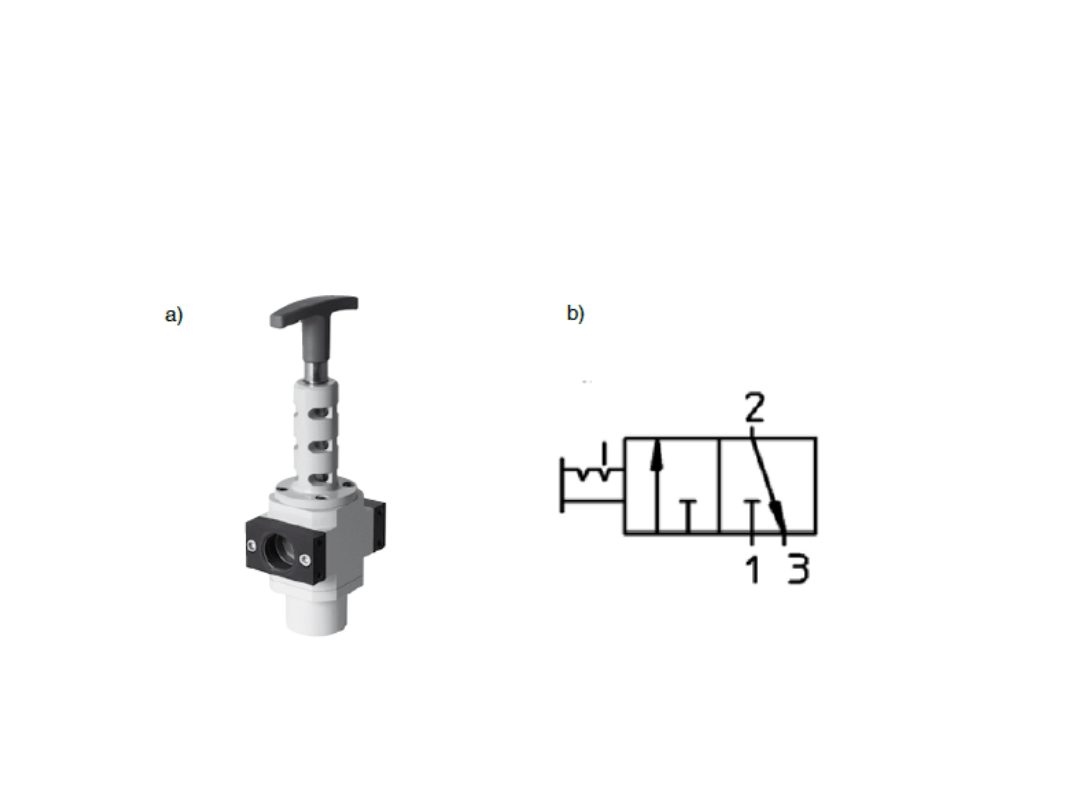
Zawór załączający z kontrolą położenia
suwaka
Opis zaworu
Sterowany elektrycznie zawór do zasilania i
odpowietrzania urządzeń pneumatycznych, z cewką
elektromagnesu bez gniazda.
-Napięcie zasilania – wybór z 3 wartości.
-Bezpośrednia kontrola położenia suwaka.
-Przeznaczony do stosowania w układach o wymaganym
dużym pokryciu diagnostycznym.
-Kontrola położenia suwaka, nie ciśnienia.
-Konfiguracja jednokanałowa.
Zawór wolnego startu i szybkiego
odpowietrzania typ MS-6-SV

Opis zaworu
Niezawodne i szybkie odpowietrzanie krytycznych ze względu
na bezpieczeństwo przestrzeni w instalacjach i urządzeniach.
Stosowany również w celu osiągnięcia możliwie najwyższej
gotowości maszyn dzięki zapewnieniu bezpieczeństwa procesów.
Posiada certyfikat z wymaganiami DIN EN 13849-1, kategoria 4
Szybkie odpowietrzenie w celu bardzo szybkiego obniżenia
ciśnienia
Przepływ podczas odpowietrzania 1,5 razy większy niż podczas
napełniania
Ciągłe monitorowanie podczas pracy zaworu zdatności do
wypełnienia funkcji szybkiego odpowietrzania
Funkcje wolnego startu i pełnego otwarcia oraz odpowietrzanie
zintegrowane w jednym zaworze
Ochrona przed nieoczekiwanym uruchomieniem (konfiguracja
dwukanałowa)
Zwarta budowa
Wewnętrzny układ kontroli położenia suwaka
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
Wyszukiwarka
Podobne podstrony:
Uklady pneumatyczne o zadanym cyklu pracy, Księgozbiór, Studia, LOOS
3 7 UKŁADY PNEUMATYCZNE
Bezpieczne układy hydrauliki siłowej
5 Hydrauliczne i pneumatyczne układy automatyki
Politechnika Białostocka 02 Podstawowe pneumatyczne układy sterowania ręcznego
Układy Bezpieczeństwa Biernego W Samochodach Osobowych, STUDIA - Kierunek Transport, STOPIEŃ I, MATE
Bezpieczne elektryczne układy sterujące
Szlifierka pneumatyczna, Instrukcje-Bezpiecznej Pracy
pneumatyka lab układy
Elektro-Pneumatyczne układy sterowania, Technikum, Technik Mechatronik, PUM, Sprawozdania
2D Pneumatyczne układy
5 Hydrauliczne i pneumatyczne układy automatyki
Hydrauliczne i pneumatyczne układy automatyki
Bezpieczenstwo na lekcji wf
APD 5 układy bramkowe
Układy Napędowe oraz algorytmy sterowania w bioprotezach
więcej podobnych podstron