
Niepewność
pomiaru
WWWWWWWWWWWWWWW
WYRAŻANIE
NIEPEWNOŚCI
POMIARU
PRZEWODNIK
BIPM
Międzynarodowe Biuro Miar
IEC
Międzynarodowa Komisja Elektrotechniczna
IFCC
Międzynarodowa Federacja Chemii Klinicznej
ISO
Międzynarodowa Organizacja Normalizacyjna
IUPAC
Międzynarodowa Unia Chemii Czystej
i Stosowanej
IUPAP
Międzynarodowa Unia Fizyki Teoretycznej
i Stosowanej
OIML
Międzynarodowa Organizacja Metrologii
Prawnej
Główny Urząd Miar
Guide to the expression of
uncertainty in measurement
Międzynarodowy
dokument
wydany przez BIPM, IEC, IFCC,
ISO, IUPAC, IUPAP, OIML
w 1993 i 1995 roku

niepewność pomiaru
parametr
związany
z
wynikiem
pomiaru,
charakteryzujący rozrzut wartości, które można w
uzasadniony sposób przypisać wielkości mierzonej

niepewność standardowa
niepewność wyniku pomiaru wyrażona w formie
odchylenia standardowego
i
x
u

złożona niepewność standardowa
niepewność standardowa wyniku pomiaru określana, gdy
wynik ten jest otrzymywany z wartości pewnej liczby
innych wielkości, równa pierwiastkowi kwadratowemu z
sumy wyrazów, będących wariancjami lub kowariancjami
tych innych wielkości z wagami zależnymi od tego jak
wynik pomiaru zmienia się wraz ze zmianami tych
wielkości
y
u
c
Prawo propagacji niepewności
N
i
i
i
x
u
x
f
y
u
1
2
2
2
c
j
i
N
i
N
i
j
j
i
x
x
u
x
f
x
f
,
2
1
1
1

niepewność rozszerzona
wielkość określająca przedział wokół wyniku pomiaru, od
którego to przedziału oczekuje się, że obejmie dużą część
rozkładu wartości, które w uzasadniony sposób można
przypisać wielkości mierzonej
U

y
u
k
U
c
k – współczynnik
rozszerzenia
u
c
(y) – złożona niepewność standardowa

m = 100,02147
(35)
g
Zapis niepewności pomiaru
m = 100,02147 g ±
0,69 mg
dla poziomu ufności 95 %

Probabilistyczny model niepewności
pomiaru
- rachunek zmiennych
losowych
- statystyka matematyczna

zmienna losowa (ciągła)
zmienna, która może przyjmować dowolną wartość ze
skończonego lub nieskończonego przedziału określonego
zbioru
i
z
którą
związany
jest
rozkład
prawdopodobieństwa

Parametry zmiennej losowej
d
g
- wartość oczekiwana
- odchylenie standardowe
d
2
2
g
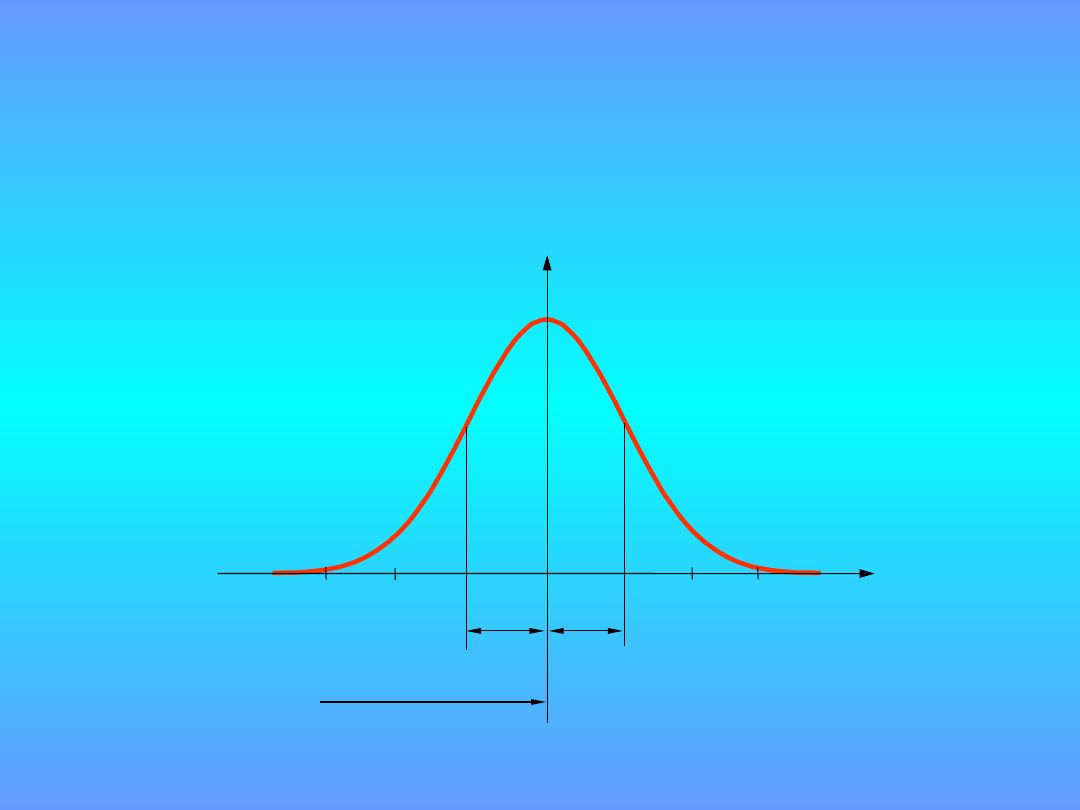
Rozkład normalny
3
2
1
-1
-2
-3
g(
)
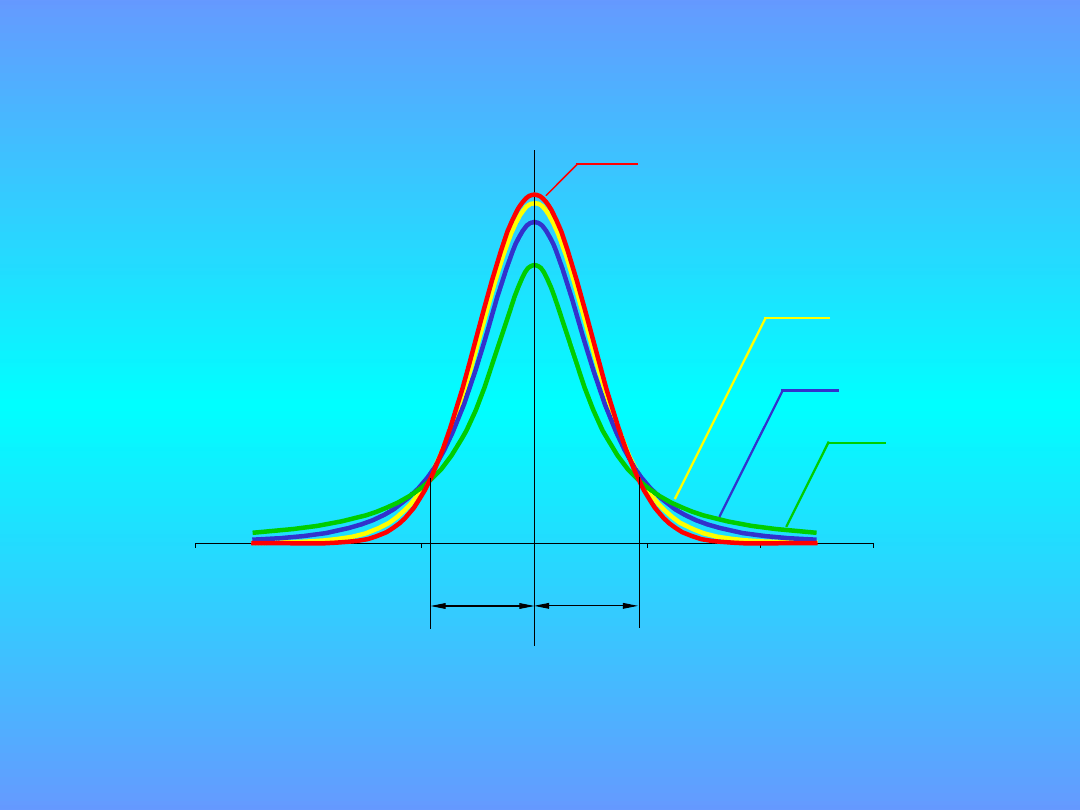
Rozkład
Studenta
-4
-2
2
4
v =
v =
10
v =
3
v=
1
p
v
f
t
,
t
t
v
t(v)
v
t(v)
v
t(v)
1
12,7062
19
2,0930
44
2,0154
2
4,3027
20
2,0860
46
2,0129
3
3,1824
21
2,0796
48
2,0106
4
2,7764
22
2,0739
50
2,0086
5
2,5706
23
2,0687
55
2,0040
6
2,4469
24
2,0639
60
2,0003
7
2,3646
25
2,0595
65
1,9971
8
2,3060
26
2,0555
70
1,9944
9
2,2622
27
2,0518
80
1,9901
10
2,2281
28
2,0484
90
1,9867
11
2,2010
29
2,0452
100
1,9840
12
2,1788
30
2,0423
120
1,9799
13
2,1604
32
2,0369
150
1,9759
14
2,1448
34
2,0322
200
1,9719
15
2,1314
36
2,0281
250
1,9695
16
2,1199
38
2,0244
300
1,9679
17
2,1098
40
2,0211
400
1,9659
18
2,1009
42
2,0181
500
1,9647
Wartości kwantyli rozkładu Studenta dla poziomu
ufności 95 %
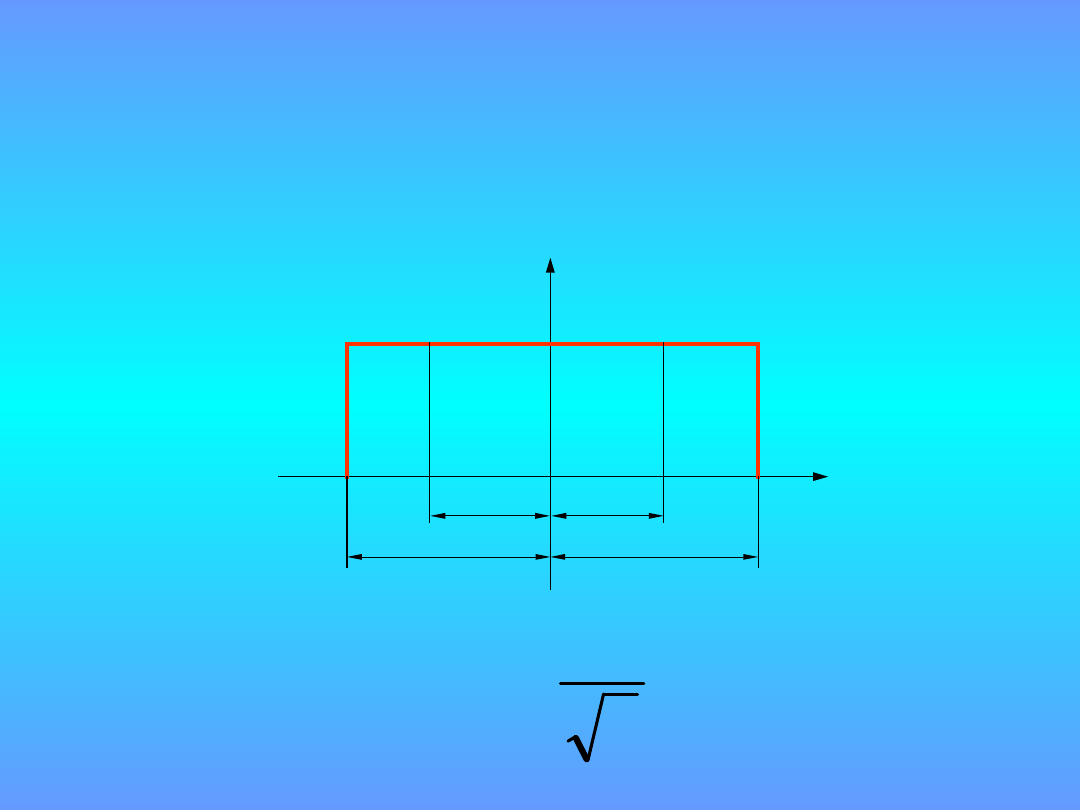
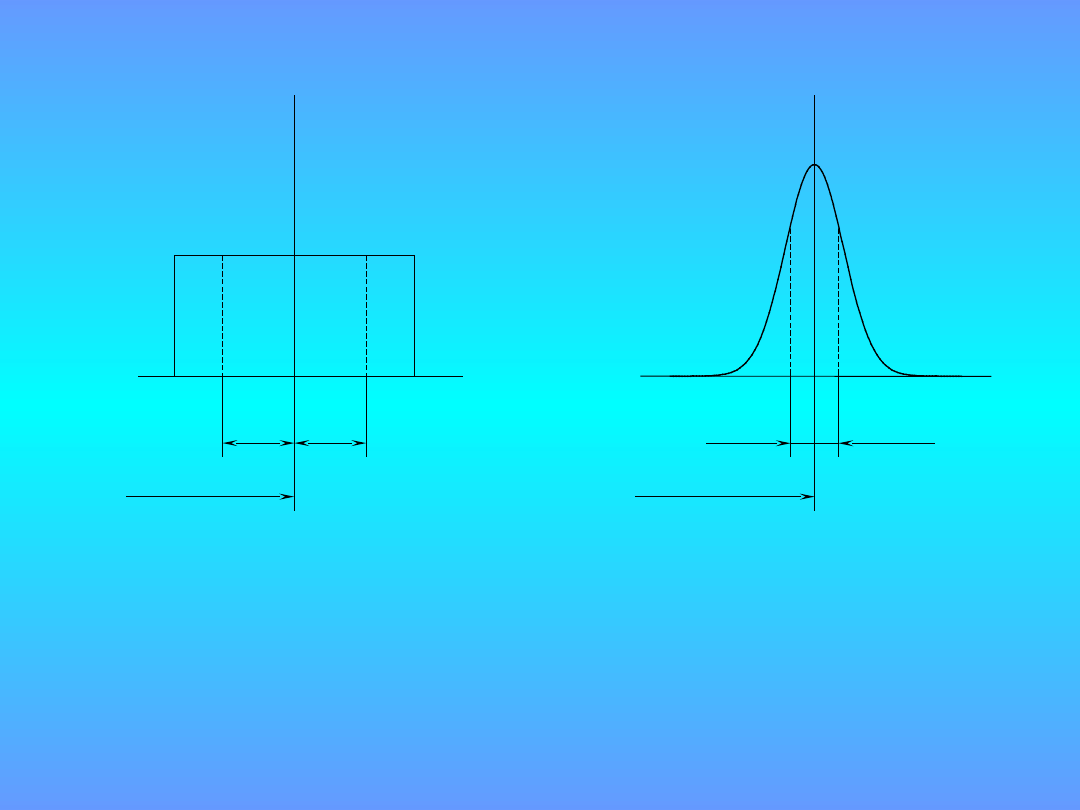
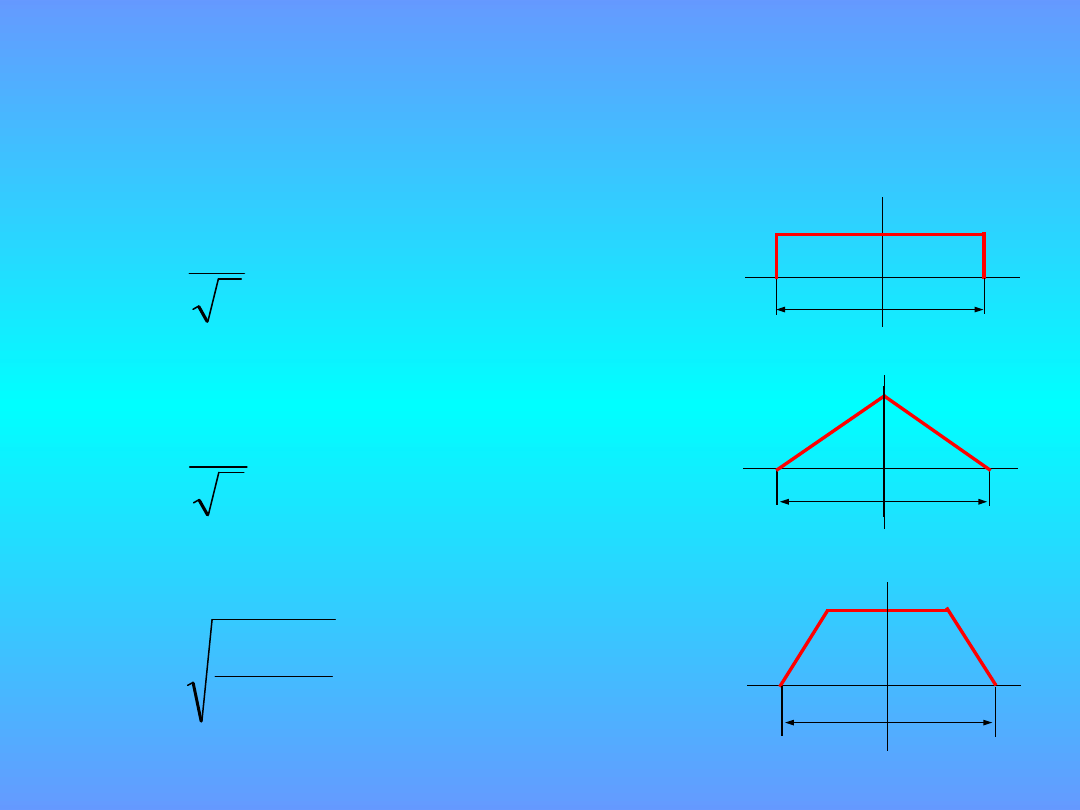
Rozkład
prostokątny
a
a
3
a
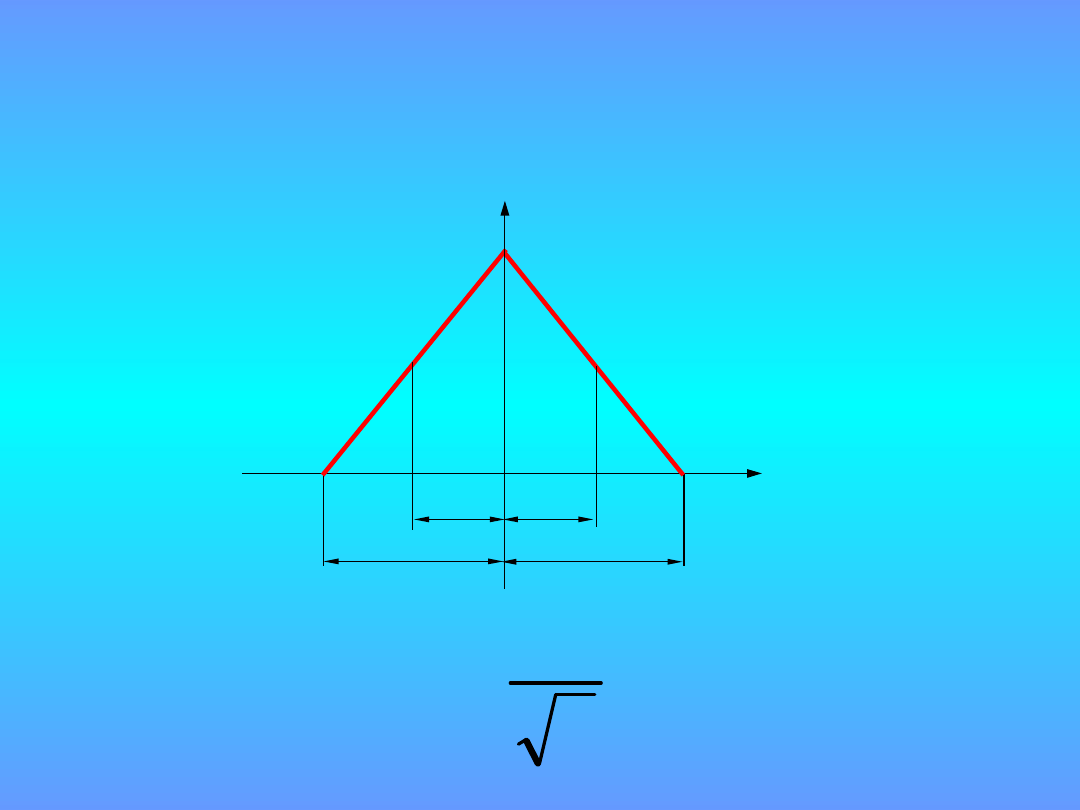
Rozkład
trójkątny
a
a
6
a
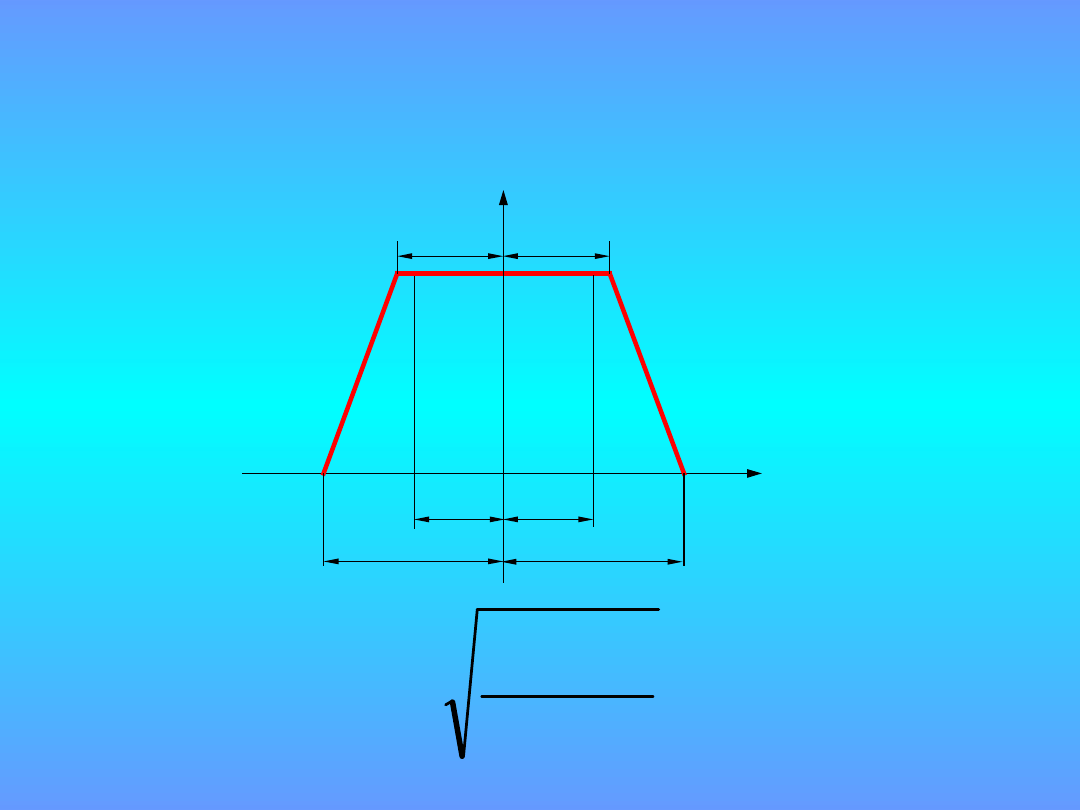
Rozkład
trapezowy
a
a
b
b
6
2
2
b
a

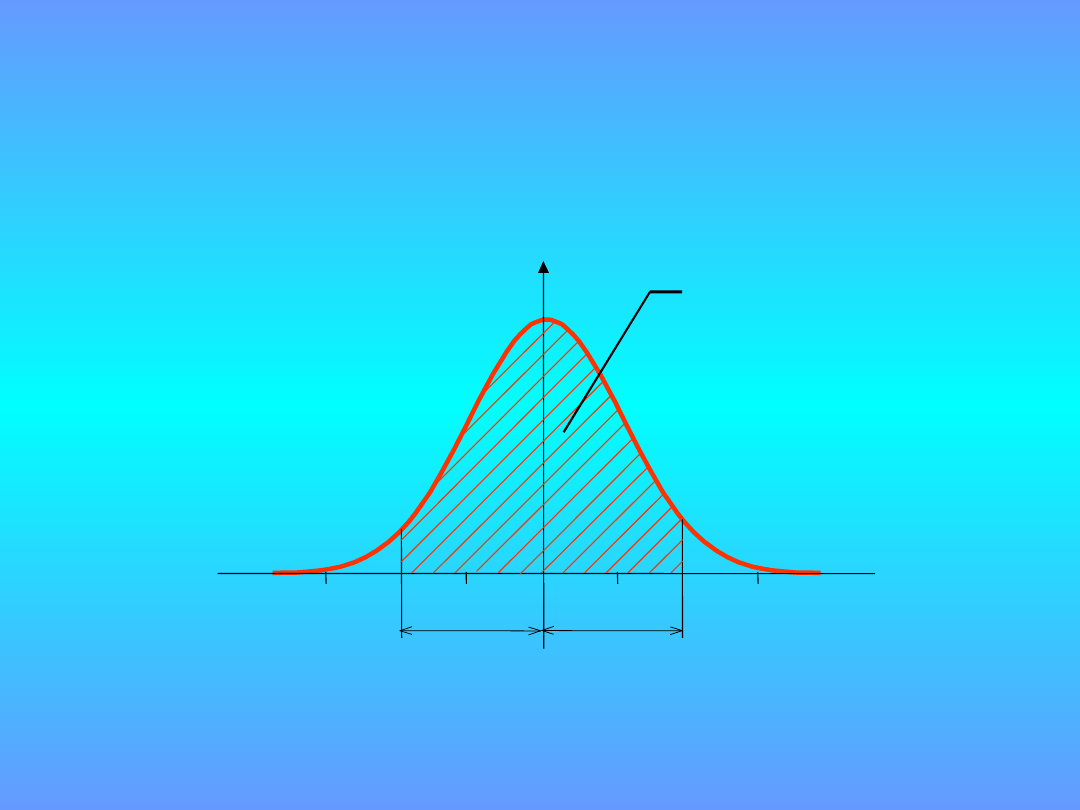
przedział ufności
najmniejszy przedział pomiędzy dwoma
kwantylami rozkładu dla wartości wielkości
mierzonej, które wyznaczają poziom ufności 95
%
Wielkość wejściowa
i
– wartość oczekiwana
i
– odchylenie standardowe
g
i
(
i
) – funkcja gęstości prawdopodobieństwa
i
i
i
g
i
(
i
)
j
j
j
g
j
(
j
)

Założenia modelu
matematycznego
1. Wielkość wyjściowa funkcją liniową
wielkości wejściowych
2. Wielkości wejściowe zmiennymi losowymi
niezależnymi
3. Symetryczne rozkłady wielkości
wejściowych:
Studenta, normalny, prostokątny,
trójkątny, trapezowy
k
N
= 1,96 dla p = 95 %
k·u
3
2
k·u
1
-1
-2
-3
p

Procedura obliczania
niepewności pomiaru

1. Równanie pomiaru
2. Równanie niepewności
pomiaru
3. Wielkości wejściowe
4. Budżet niepewności
5. Niepewność rozszerzona
6. Wynik pomiaru
Algorytm procedury obliczania
niepewności pomiaru

1. Równanie pomiaru
N
N
x
c
x
c
y
1
1
N
x
x
1
wielkości wejściowe

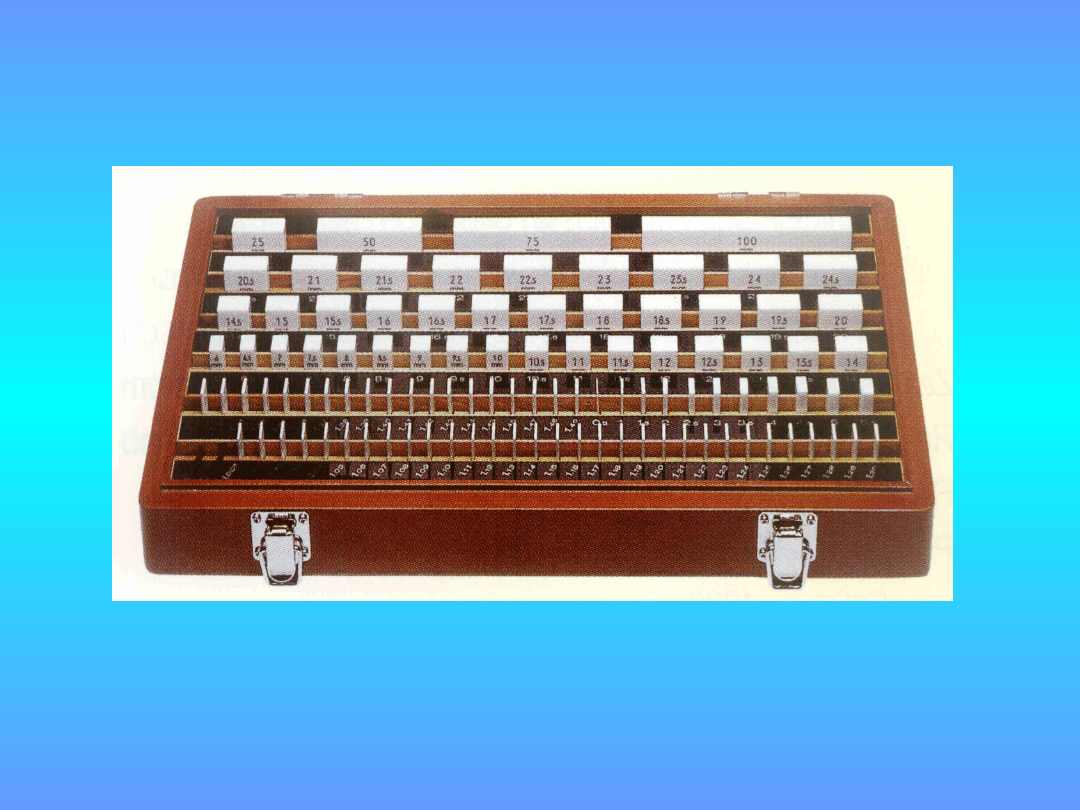
Kalibracja wzorca miary
y
w
= x
w
+ δx
d
+ δx
t
+ δx
m
+ δx
x
+ x
c
+ δx
c
x
w
– wzorzec odniesienia
δx
d
– dryft wzorca odniesienia
δx
t
– oddziaływania środowiskowe
δx
m
– oddziaływania mechaniczne lub elektryczne
δx
x
– pozostałe wpływy
x
c
– wskazanie komparatora
δx
c
– niedokładność komparatora

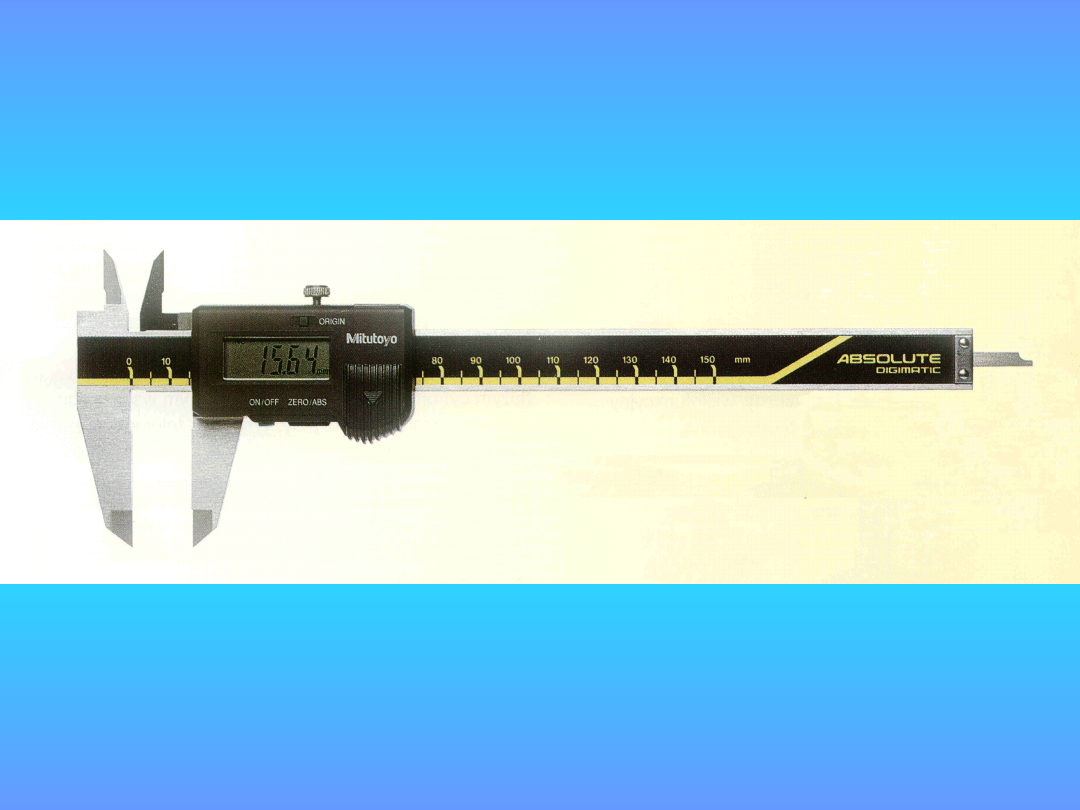
Błąd przyrządu pomiarowego
x
p
– wskazanie przyrządu pomiarowego
x
p
– rozdzielczość przyrządu pomiarowego
x
w
– wzorzec odniesienia
x
d
– dryft wzorca odniesienia
x
t
– oddziaływania środowiskowe
x
m
– oddziaływania mechaniczne lub elektryczne
x
x
– pozostałe wpływy
e
p
= x
p
+
x
p
x
w
x
d
x
t
x
m
x
x
2. Równanie niepewności pomiaru
N
N
x
u
c
x
u
c
y
u
2
2
1
2
2
1
2
c
i
i
x
y
c
3. Wielkość wejściowa – metoda
typu A
n
q
s
q
s
x
u
i
Estymata połączona odchylenia
standardowego
m
s
s
m
j
j
1
2
p
n
s
x
u
i
p
s
j
– odchylenie standardowe eksperymentalne j-tej serii
m – liczba serii pomiarowych
3
a
x
u
i
rozkład prostokątny
6
a
x
u
i
rozkład trójkątny
6
2
2
b
a
x
u
i
rozkład trapezowy
a
a
a
a
b b
a
a
3. Wielkość wejściowa – metoda
typu B

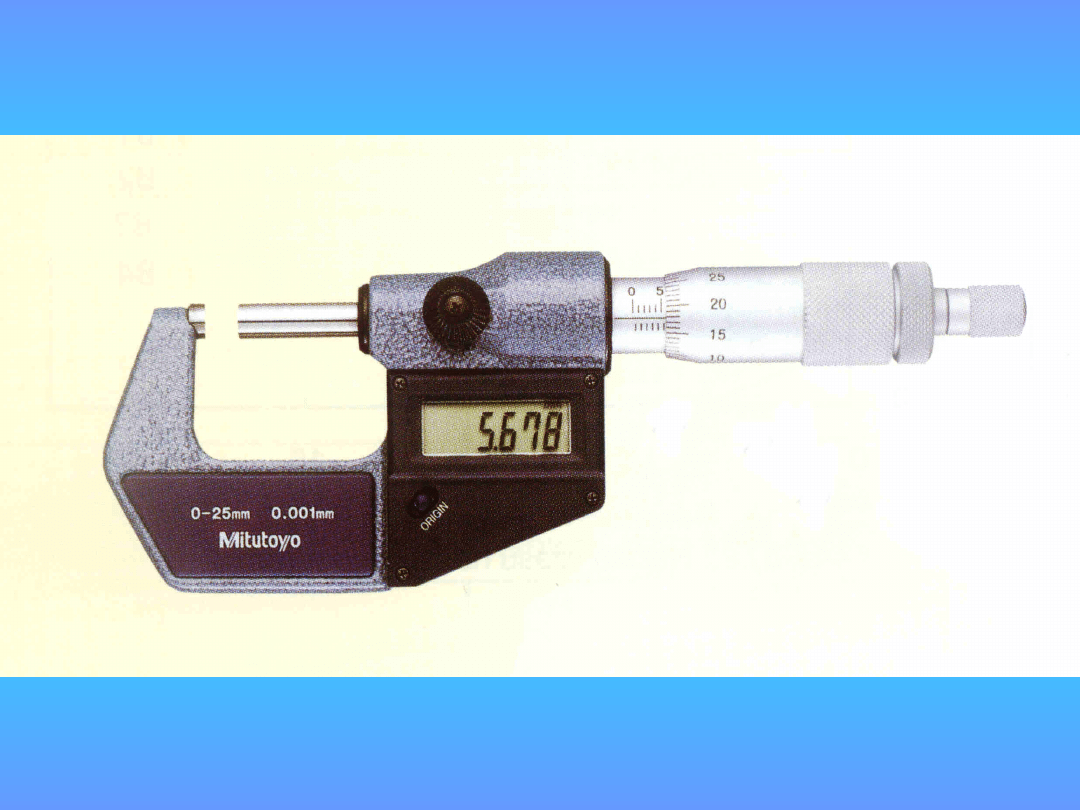
Rozdzielczość wskazań
Część wartości działki elementarnej –
przyrząd analogowy
Kwant wskazania – przyrząd cyfrowy
Rozdzielczość = 0,1 · wartość działki elementarnej
Rozdzielczość = kwant wskazania
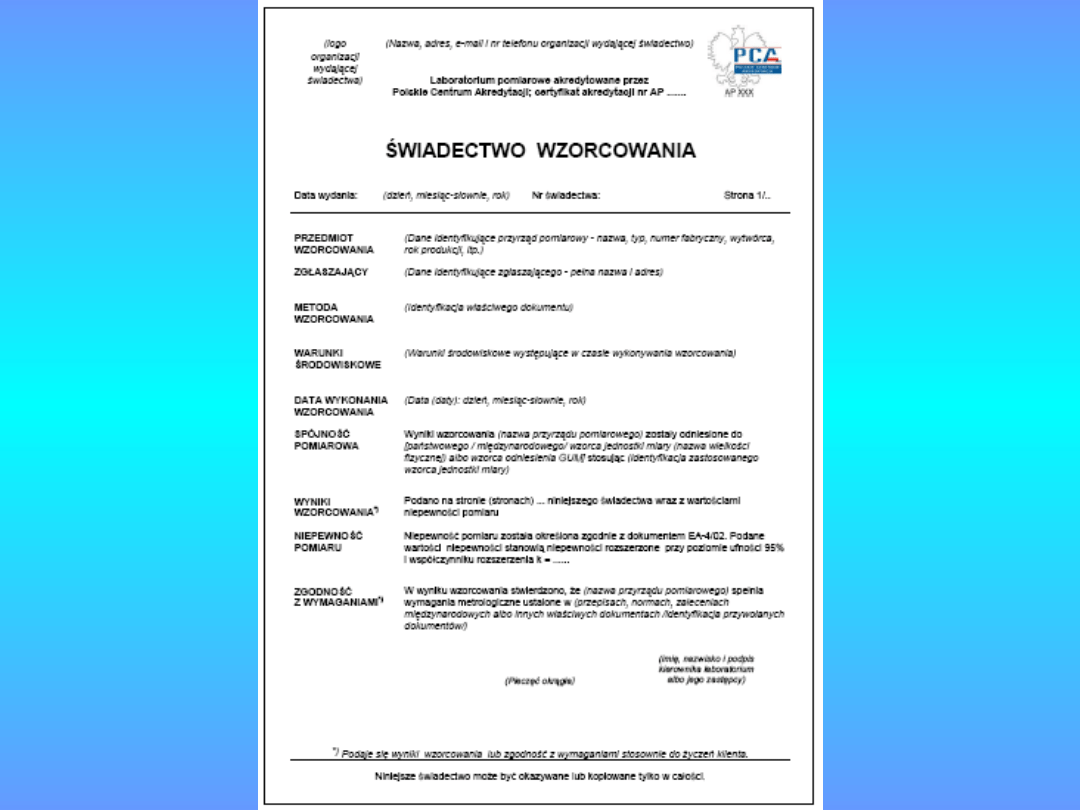
k
U
x
u
i
ze świadectwa wzorcowania
Niepewność błędu lub poprawki
wskazań
5. Niepewność rozszerzona
y
u
k
U
c
niepewność rozszerzona wyrażana jest dla
poziomu ufności 95 %
6. Wynik pomiaru
Wynik pomiaru należy przedstawić wraz z odpowiednią
jednostką miary, z wyjątkiem przypadku gdy wielkość jest
bezwymiarowa. Wartość liczbową estymaty wyniku
pomiaru należy zaokrąglić tak, aby ostatnia jej cyfra
znacząca była na takim samym miejscu, jak ostatnia cyfra
niepewności rozszerzonej związanej z tą estymatą.
U
y
y

Zapis wyniku pomiaru
mg
42
g
100
m
g
042
,
0
000
,
100
m
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
Wyszukiwarka
Podobne podstrony:
PEM (11) Niepewno%c5%9b%c4%87 pomiaru PF
NIEPEWNOŚĆ POMIARU
Wyk%c5%82ad Niepewno%c5%9b%c4%87 pomiaru
mierniki i niepewności pomiarowe
Błąd i niepewność pomiaru
podstawy analizy niepewności pomiarowych
Wyznaczanie niepewności pomiarów, PWr W9 Energetyka stopień inż, II Semestr, Podstawy metrologii i t
niepewnosci pomiarowe
3 Wyznaczanie niepewności pomiaru pośredniego
00 niepewność pomiaru
F2- Obliczenia i rachunek niepewności pomiarowej, Szkoła, Fizyka 02
niepewnosci pomiarowe, PWr, SEMESTR 1, FIZYKA, sprawozdania
Pomiary i niepewności pomiarowe, 6
Niepewność pomiarów
więcej podobnych podstron