Automatyka przemysłowa
Serwonapędy
1
MR-J2
MR-J2
S
S
S
S
erwonapęd
erwonapęd
y
y
AC
AC
Mitsubishi
Mitsubishi
Electric
Electric
(2003)
(2003)
Automatyka przemysłowa
Serwonapędy
2
MR-J2
MR-J2
S
S
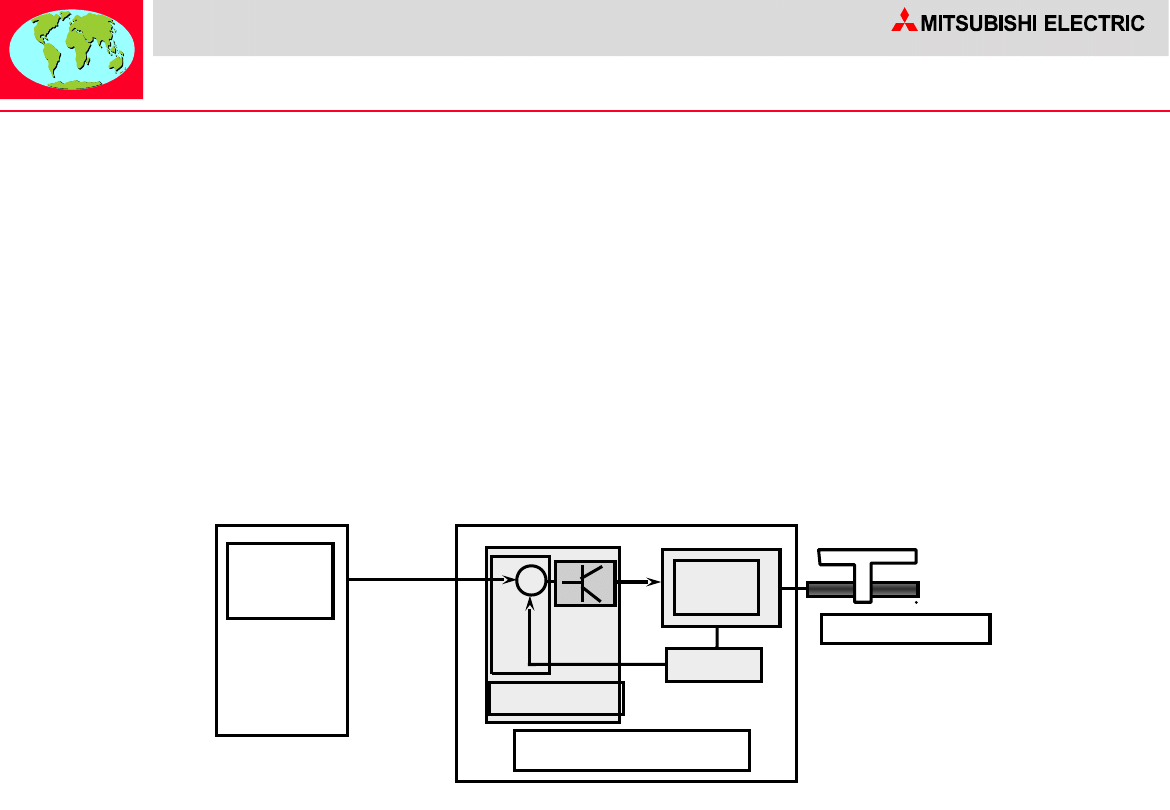
Co to jest “Serwo”?
Ogólnie serwomechanizmem nazywamy system automatycznej
regulacji, przeznaczony do odtwarzania zmian wielkości zadanej,
będącej mechaniczną charakterystyką (np. prędkość, obrót, pozycja)
rzeczywistego obiektu.
Wartość zadana (np. pozycja, prędkość, moment obrotowy)
wprowadzana jest z zadajnika do serwomechanizmu, który następnie
porównuje ją z mierzoną wartością rzeczywistą, i w sposób ciągły
wykonuje regulację tak, by zminimalizować różnicę.
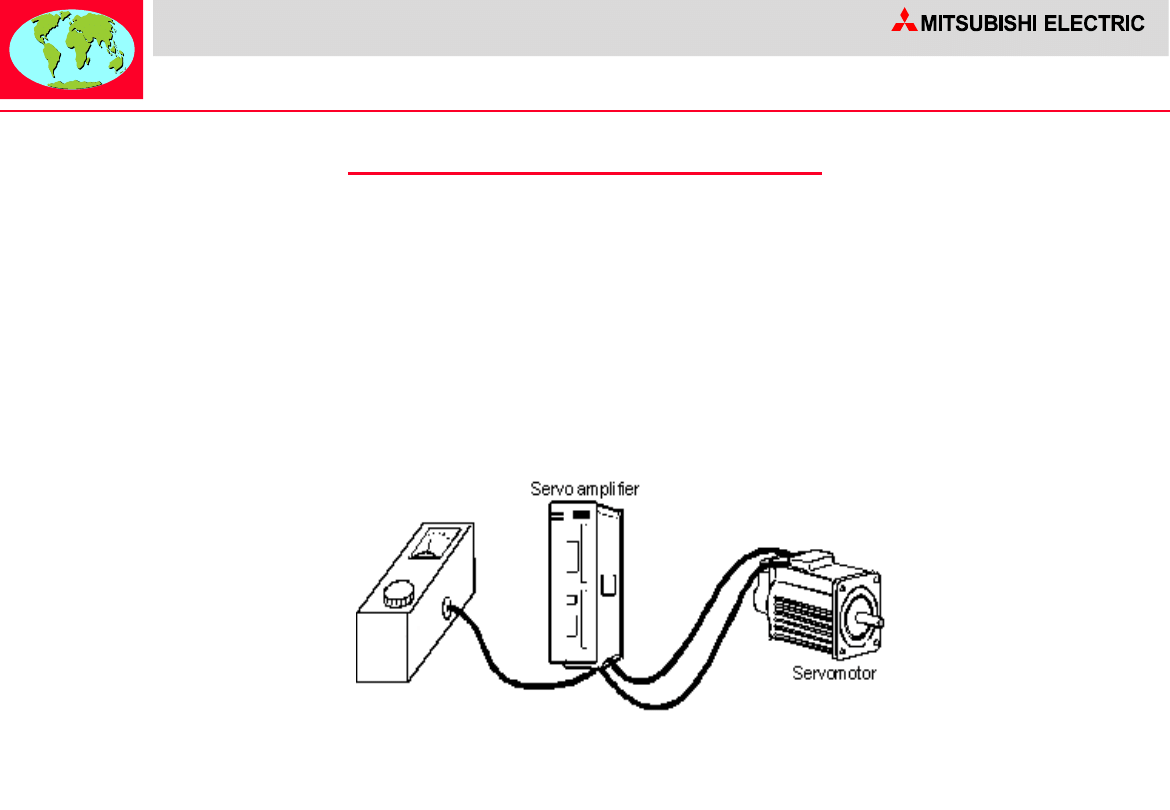
Kompletny serwomechanizm zawiera: serwowzmacniacz, serwosilnik
i przetwornik położenia.
Sterowni
k
ruchu
Serwo-
silnik
Enkoder
Wzmacniacz
Serwomechanizm
Układ mechaniczny
Automatyka przemysłowa
Serwonapędy
3
MR-J2
MR-J2
S
S
Cechy charakterystyczne serwonapędu
Serwonapęd musi JEDNOCZEŚNIE spełniać WSZYSTKIE poniższe
wymogi:
Wysoka przeciążalność (np. 300% momentu znamionowego)
Możliwość regulacji prędkości i momentu w czterech kwadrantach,
(włączając zerową prędkość)
Szeroki zakres, wysoka liniowość i dokładność regulacji prędkości
Szerokie pasmo przenoszenia (wysoka szybkość reakcji)
(Bardzo) niska bezwładność silnika
Automatyka przemysłowa
Serwonapędy
4
MR-J2
MR-J2
S
S
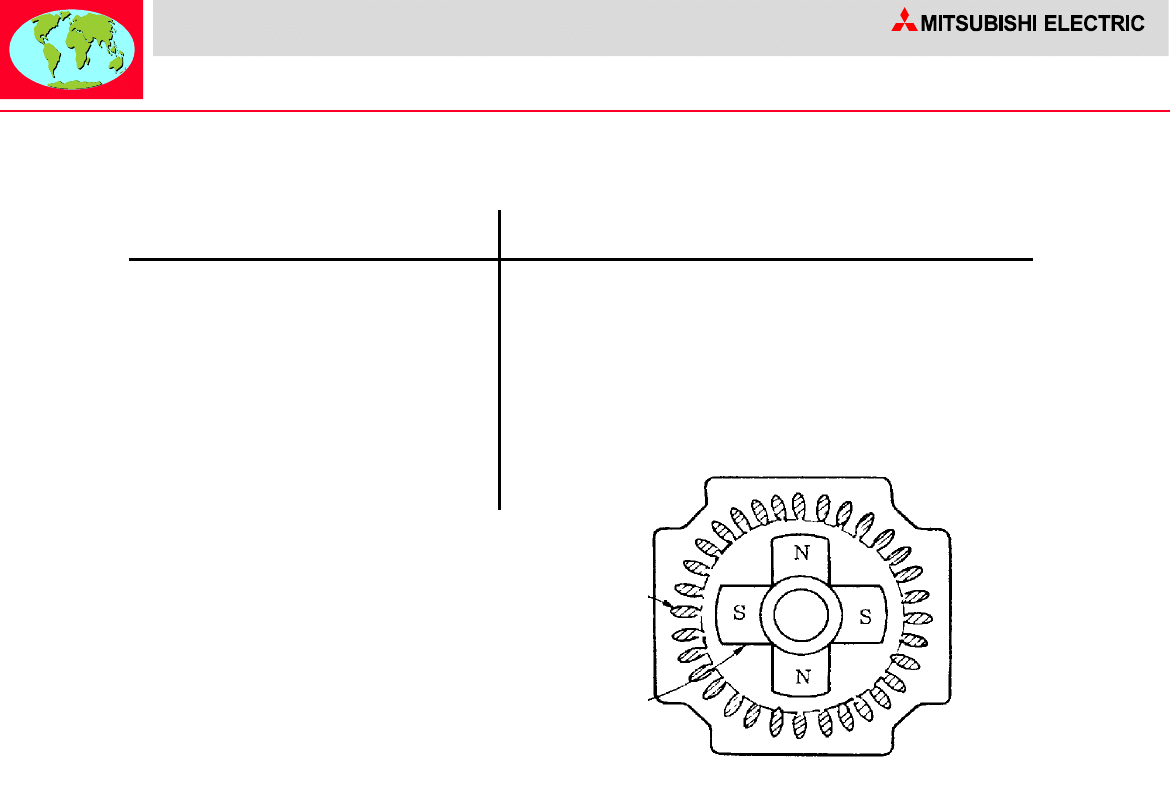
Silnik synchroniczny z magnesami
trwałymi
Stojan:
uzwojenia
3-fazowe
Wirnik:
Magnesy
trwałe
Zalety
Bezobsługowy
Znakomita odporność na
warunki środowiskowe
Wysoki moment napędowy
Możliwość hamowania dyna-
micznego przy braku zasilania
Niewielkie wymiary i masa
Wysoka gęstość mocy
Wady
Złożona budowa wzmacniacza w porównaniu
ze stosowanym dla silnika DC
Konieczność ścisłego dopasowania silnika
do serwowzmacniacza
Ryzyko rozmagnesowania lub uszkodzenia
magnesów wirnika
Automatyka przemysłowa
Serwonapędy
5
MR-J2
MR-J2
S
S
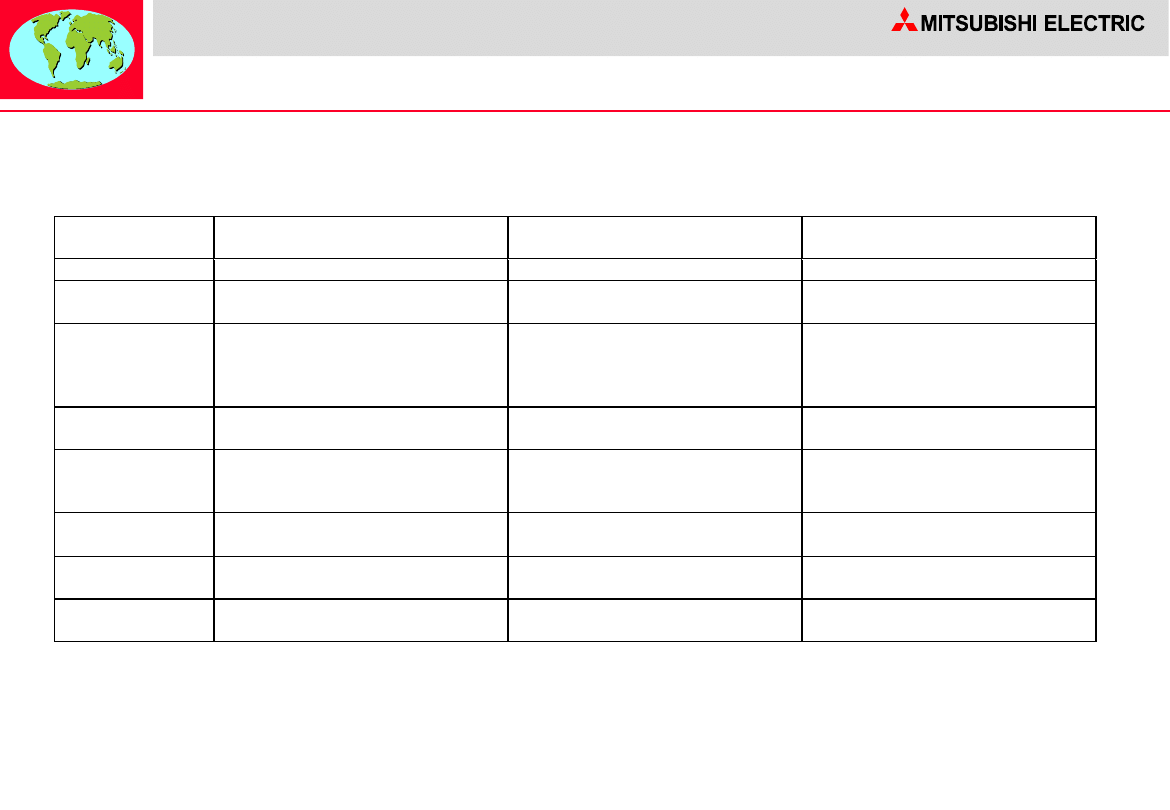
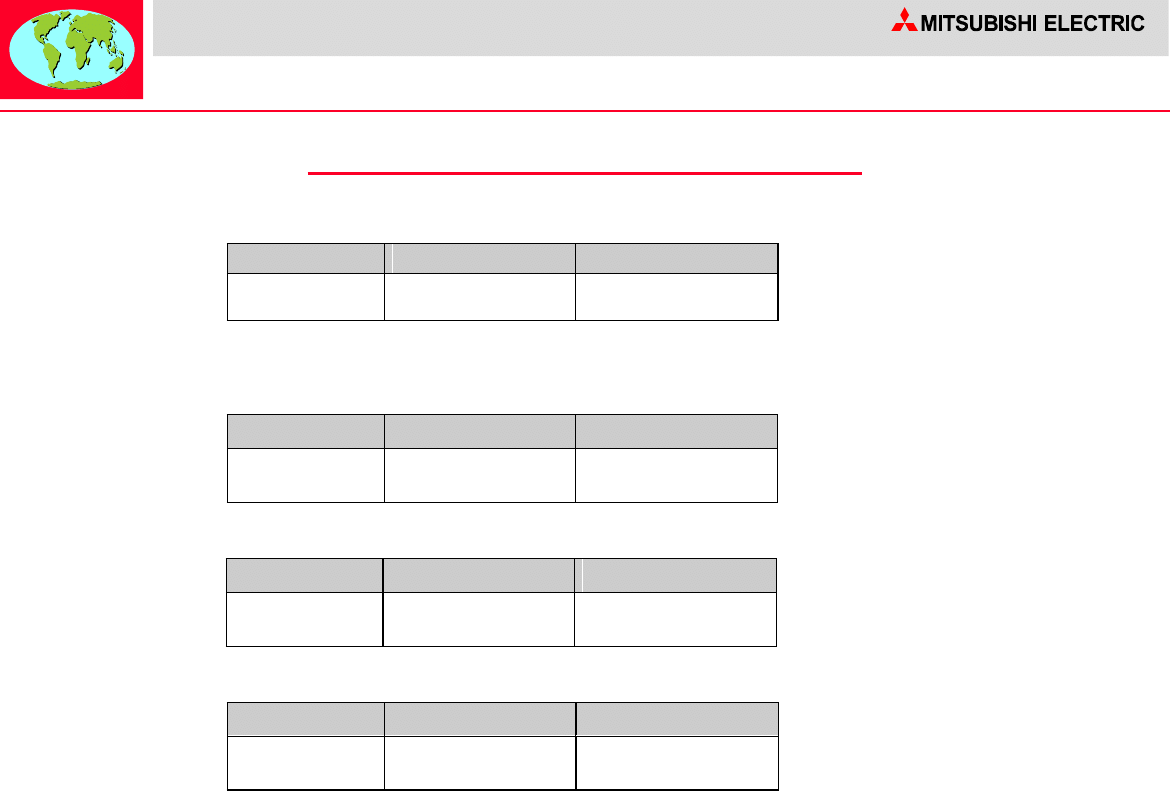
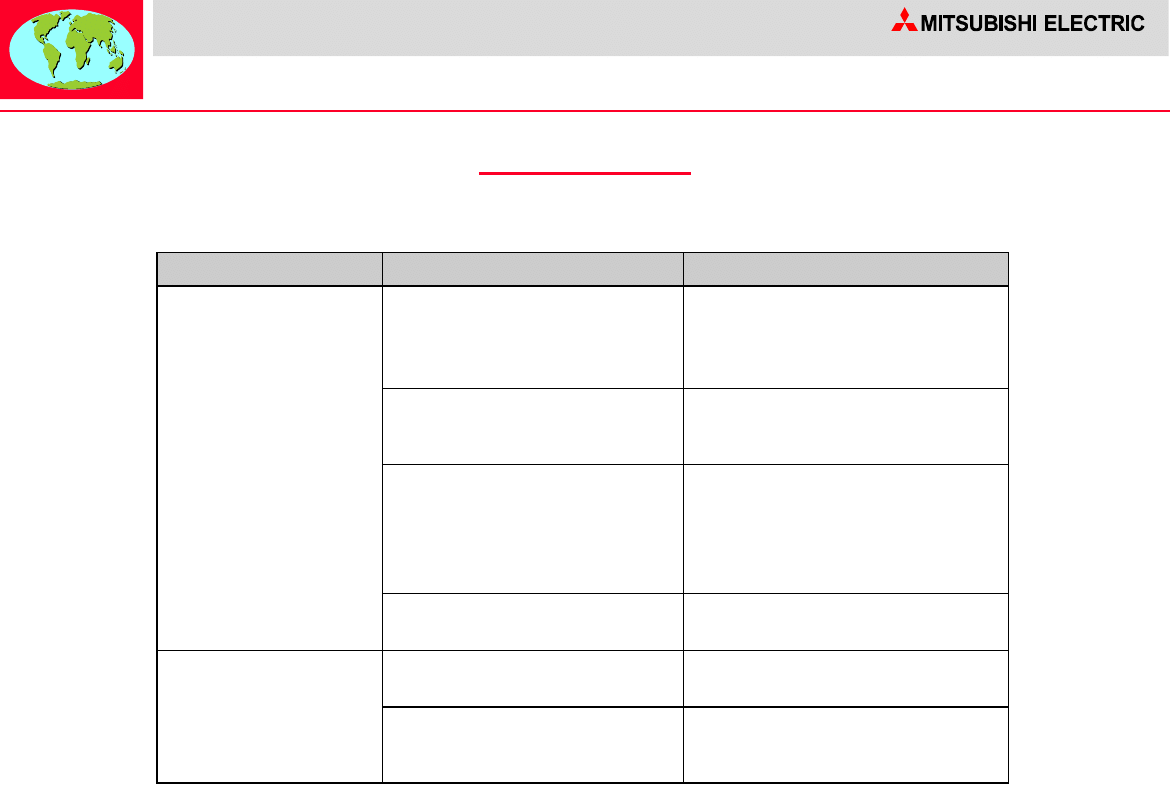
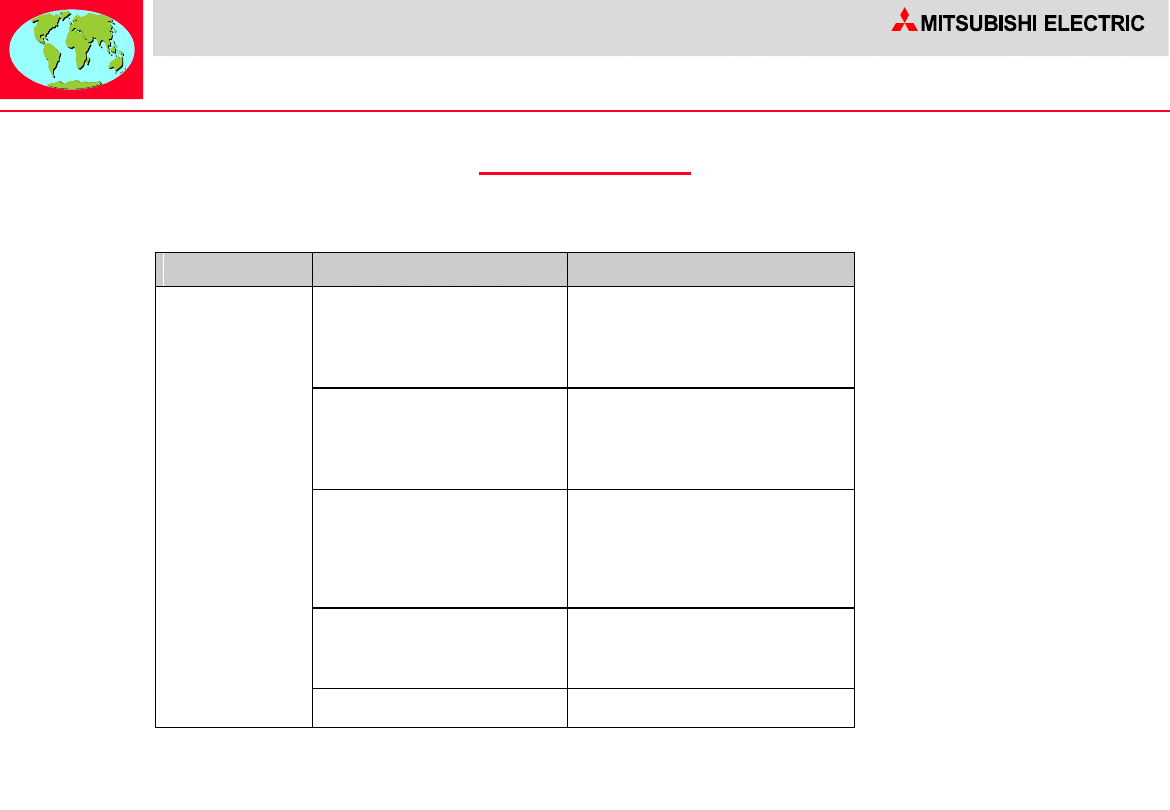
Porównanie: napęd falownikowy
serwonapęd (1)
Napęd
Kryterium
Przetwornica ogólnego
stosowania
Przetwornica wektorowa
Serwonapęd AC
Moc
100W do 800kW
1,5 do 280kW
30W do 7kW (55kW)
Regulacja
prędkości
1:10 do 1:120
1:1000 to 1:1500
1:1000 do 1:5000
Niestabilność
prędkości (%)
3 - 4%
(Poniżej 1% przy użyciu
zaawansowanego sterowania
wektorowego)
0,03%
(przy zmianach obciążenia
od 0 do 100%)
0,03%
(przy zmianach obciążenia
od 0 do 100%)
Pasmo
przenoszenia
Wąskie
1 do 5Hz
30 do 50Hz
Szerokie
200 do 550Hz
Zalecana
powtarzalność
cyklu start-stop
Orientacyjnie
15 razy/min.
Orientacyjnie
100 razy/min.
Orientacyjnie
150 razy/min.
Dokładność
pozycjonowania
Orientacyjnie
1 do 5mm
Orientacyjnie
10m do 100m
Orientacyjnie
1m do 10m
Stosowany
silnik
Standardowy silnik klatkowy
Dedykowany silnik klatkowy
(z enkoderem)
Dedykowany silnik synchroniczny
z magnesami trwałymi
Typowy model
Mitsubishi
Seria FR-A500
Seria FR-V500
Seria MR-J 2S
Automatyka przemysłowa
Serwonapędy
6
MR-J2
MR-J2
S
S
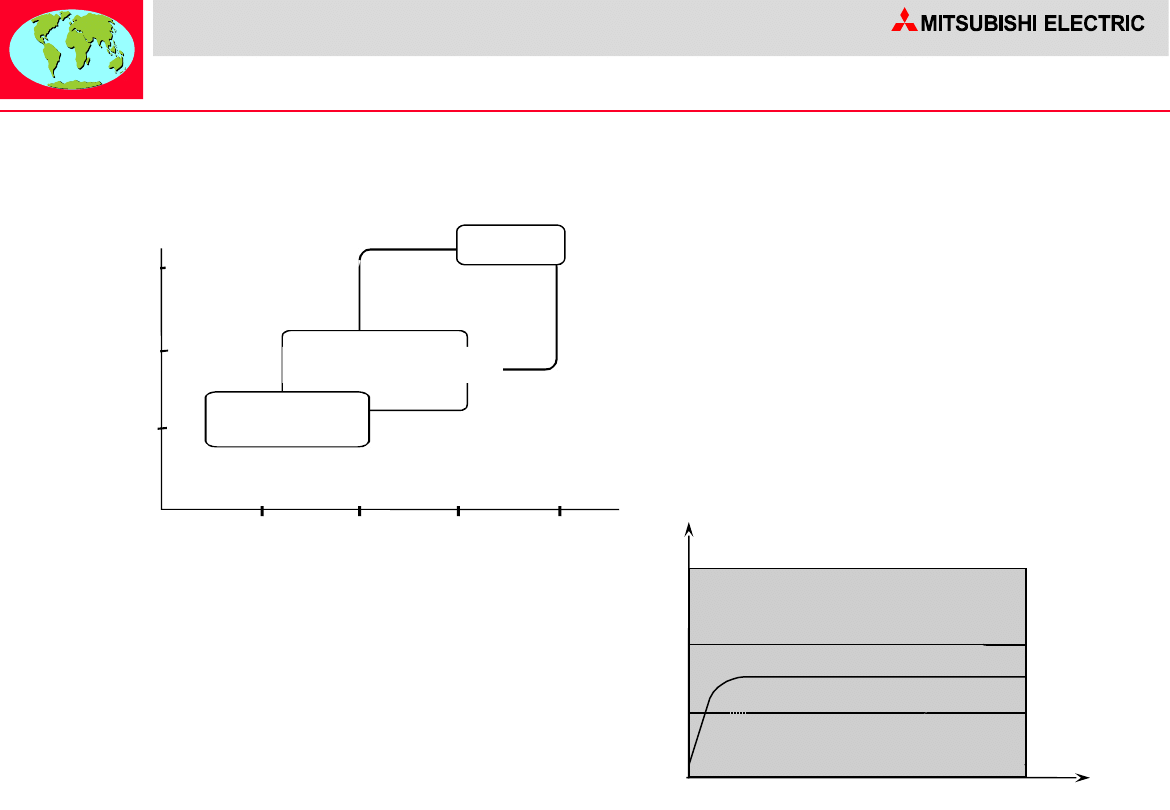
Porównanie: napęd falownikowy
serwonapęd (2)
M
o
m
e
n
t
300%
200%
Moment
znamionowy
Moment max. - serwonapęd
Moment max.
-przetwornica
Prędkość
Serwo NC
Serwo AC
Przetw. wektorowe
Przetwornice
10
100
1000
10000
10
100
1000
Pa
sm
o
p
rz
e
n
o
sz
e
n
ia
(r
a
d
/s
)
Zakres regulacji prędkości (1:[])
Automatyka przemysłowa
Serwonapędy
7
MR-J2
MR-J2
S
S
Technologia serwonapędów Mitsubishi
Electric
Począwszy od 1983 roku (wprowadzenie serii MR-A)
Mitsubishi Electric rozwija technologię serwonapędów z
silnikami prądu przemiennego z magnesami trwałymi;
1987 - Mitsubishi Electric wprowadza serię MR-SA, jeden z
pierwszych w pełni cyfrowych serwonapędów na świecie
Współczesny standard technologii serwonapędów:
w pełni cyfrowe sterowanie (zadawanie, regulacja,
modulacja PWM, pomiar i sprzężenie zwrotne)
serwosilniki: silniki synchroniczne z magnesami trwałymi w
wirniku
Automatyka przemysłowa
Serwonapędy
8
MR-J2
MR-J2
S
S
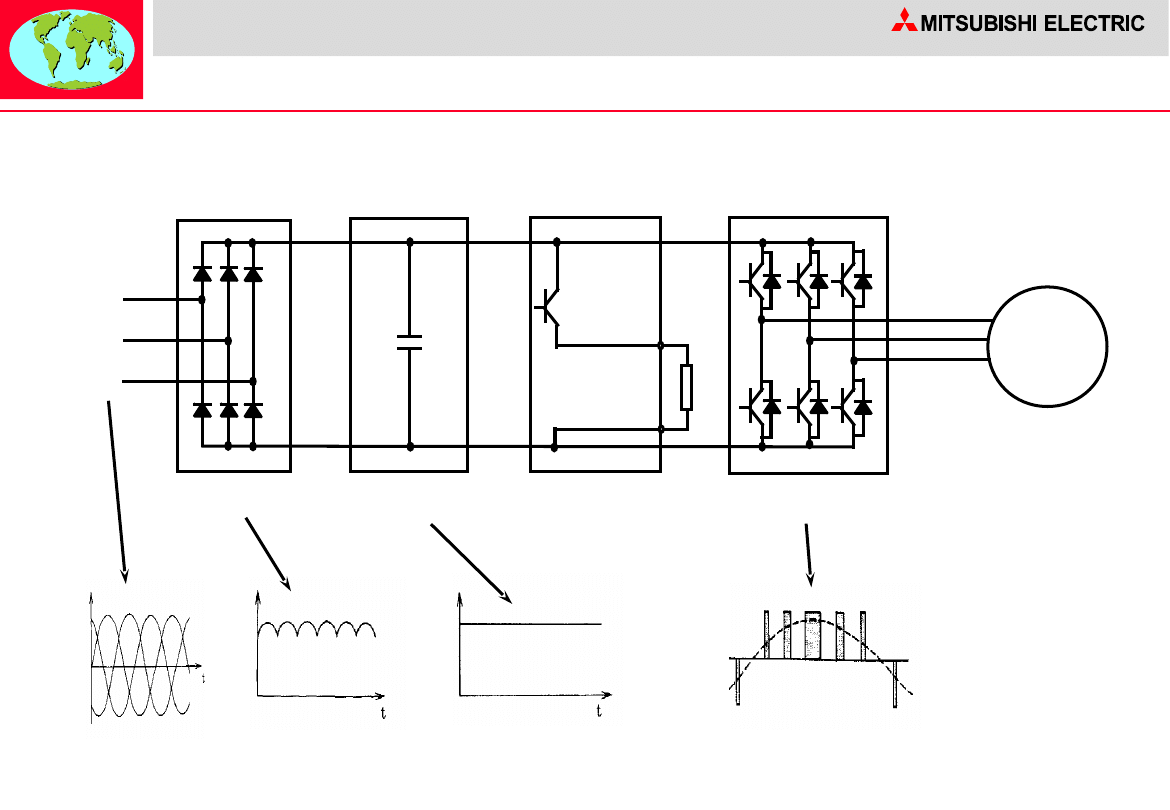
Obwód mocy
L1
L2
L3
+
-
Silnik
Prostownik Filtr DC
Obwód hamowania
Falownik tranzystorowy
Automatyka przemysłowa
Serwonapędy
9
MR-J2
MR-J2
S
S
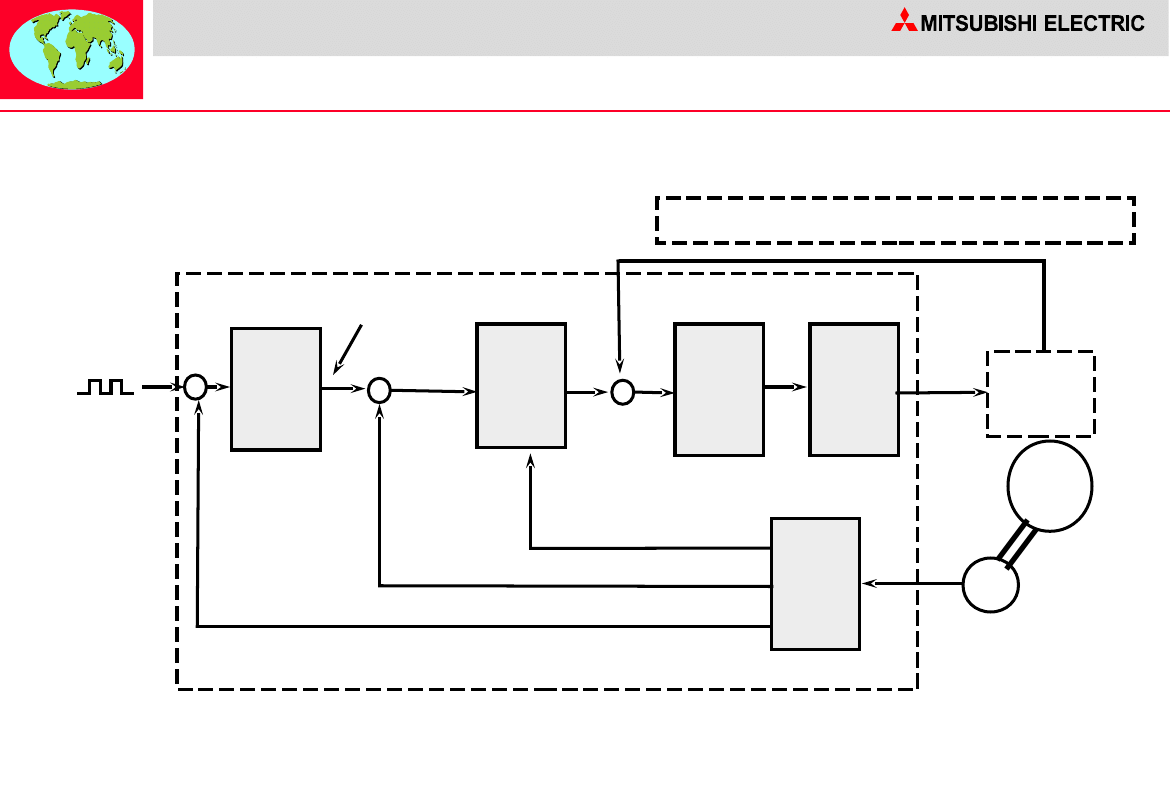
Obwód sterowania
Enkoder
Obwód
mocy
Czujnik prądowy do regulacji momentu
Licznik
uchybu
Sprzężenie pozycyjne
Sprzężenie prędkościowe
Detekcja
biegunów
magnetycznych
silnika
Zadawanie
prędkości
ModulatorPW
M
Interfejs enkodera
Zadający
ciąg
impulsów
P
S
P
W
M
T
M
Automatyka przemysłowa
Serwonapędy
10
MR-J2
MR-J2
S
S
Obwody sprzężenia zwrotnego
Obwody sprzężenia zwrotnego w serwomechanizmach wypełniają 3
funkcje:
Detekcja położenia obiektu
Detekcja prędkości obrotowej
Detekcja położenia biegunów magnetycznych
Czujniki prędkości i położenia dzielą się na liniowe i kątowe
(obrotowe).
W serwonapędach zastosowanie znalazły głównie przetworniki
obrotowe.
(Czujniki liniowe – używane do detekcji położenia obiektu)
Ze względu na konstrukcję rozróżniamy:
Resolwer
Enkoder magnetyczny
Optyczny enkoder przyrostowy
Optyczny enkoder absolutny
Automatyka przemysłowa
Serwonapędy
11
MR-J2
MR-J2
S
S
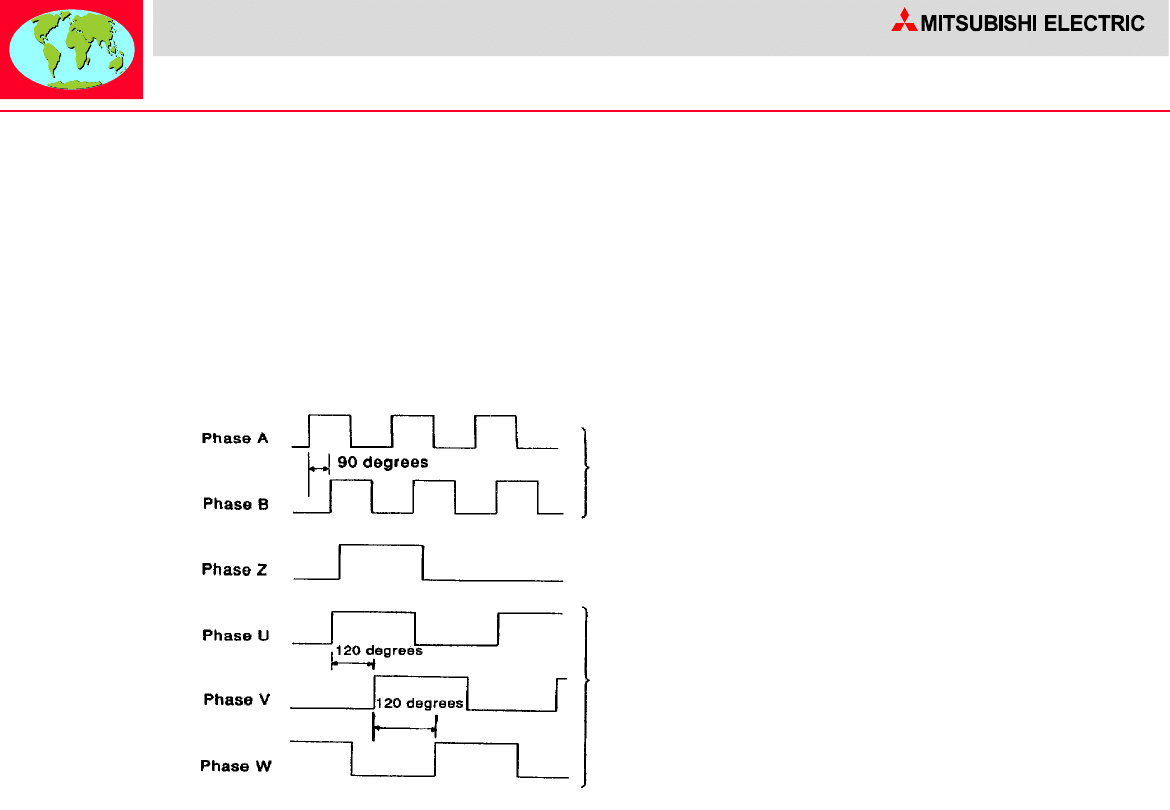
Enkoder przyrostowy (inkrementalny)
Trzy zasadnicze funkcje enkodera:
Detekcja pozycji wału silnika
Detekcja prędkości obrotowej wirnika
Detekcja położenia biegunów magnetycznych
wirnika
Po każdym wyłączeniu lub
zaniku zasilania konieczna
jest procedura powrotu do
punktu zerowego.
Detekcja położenia
biegunów magnetycznych
wirnika – zadawanie pozycji
wektora pola
elektromagnetycznego
Automatyka przemysłowa
Serwonapędy
12
MR-J2
MR-J2
S
S
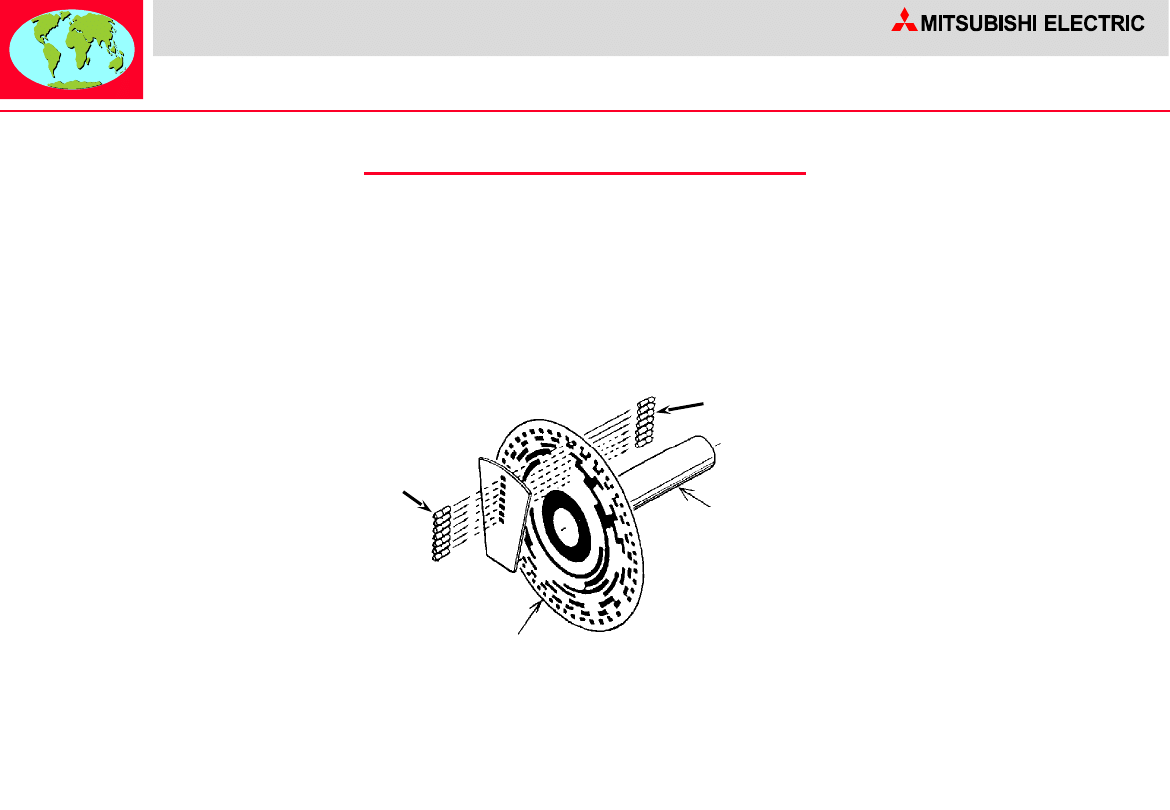
Enkoder absolutny
Umożliwia po wyłączeniu zasilania kontynuację pracy od bieżącej
pozycji.
Jest to możliwe dzięki użyciu optycznej tarczy kodowej oraz
zastosowaniu
obwodów (z podtrzymaniem bateryjnym) wykrywających zmiany
położenia
także przy wyłączonym zasilaniu serwonapędu.
Wał silnika
Kodowy dysk optyczny (przykład - 7 bit)
Czujniki
LEDy
Poza wykrywaniem zmian położenia w ramach 1 obrotu oraz zliczeniem
ilości obrotów, wzmacniacz “zna” stale bieżącą pozycję wału.
Automatyka przemysłowa
Serwonapędy
13
MR-J2
MR-J2
S
S
Autotuning - korzyści dla użytkownika
Ręczne ustawianie
parametrów
•
Uruchomienie metodą prób i
błędów:
1. Ręczne ustawienie do 12
parametrów wzmocnienia
2. Próbne uruchomienie
3. Ocena i interpretacja
wyników
4. Ustawienie nowych
wartości parametrów
wzmocnienia
5. Kilkukrotne powtórzenie
kroków 2-4
•
Optymalne ustawienia
możliwe jedynie dla stałej
wielkości i bezwładności
obciążenia
•
Kompromis konieczny w
przypadku zmiennej wielkości
lub bezwładności obciążenia
Ciągłe dostrajanie przez autotuning
• Bez ręcznego dostrajania w
czasie uruchamiania maszyny
• Optymalne ustawienia także dla
zmiennej wielkości i
bezwładności obciążenia
• Brak konieczności ponownego
dostrajania po uruchomieniu
maszyny
• Zawsze zapewniony minimalny
uchyb
Automatyka przemysłowa
Serwonapędy
14
MR-J2
MR-J2
S
S
Sterowanie (1)
Zadawanie cyfrowe ciągiem impulsów
Informacja o prędkości = częstotliwość impulsów
Informacja o przemieszczeniu = ilość impulsów
Regulacja i komunikacja cyfrowa
bez użycia skomplikowanych
protokołów
Pętla regulacji położenia zamyka
się w serwowzmacniaczu
Nie występuje dryft termiczny
Kompatybilne z wszystkimi
modułami pozycjonującymi PLC
Mitsubishi
Kompatybilne z większością
regulatorów krokowych
Trzy rodzaje ciągów impulsów, w
logice pozytywnej i negatywnej
W prawo W lewo
Automatyka przemysłowa
Serwonapędy
15
MR-J2
MR-J2
S
S
Sterowanie (2)
Trzy tryby sterowania:
regulacja prędkości (zadawanie analogowe lub cyfrowe)
regulacja momentu (zadawanie analogowe)
regulacja położenia (pozycjonowanie – zadawanie cyfrowe)
Automatyka przemysłowa
Serwonapędy
16
MR-J2
MR-J2
S
S
Regulacja prędkości
0 - 10V
W trybie regulacji prędkości wartością zadawaną jest prędkość:
obrotowa – np. wału silnika, osi, narzędzia itd.,
liniowa – podajnika, ładunku itd.,
zadawana najczęściej analogowym sygnałem napięciowym.
Serwonapęd umożliwia wysoką dokładność odwzorowania prędkości.
Automatyka przemysłowa
Serwonapędy
17
MR-J2
MR-J2
S
S
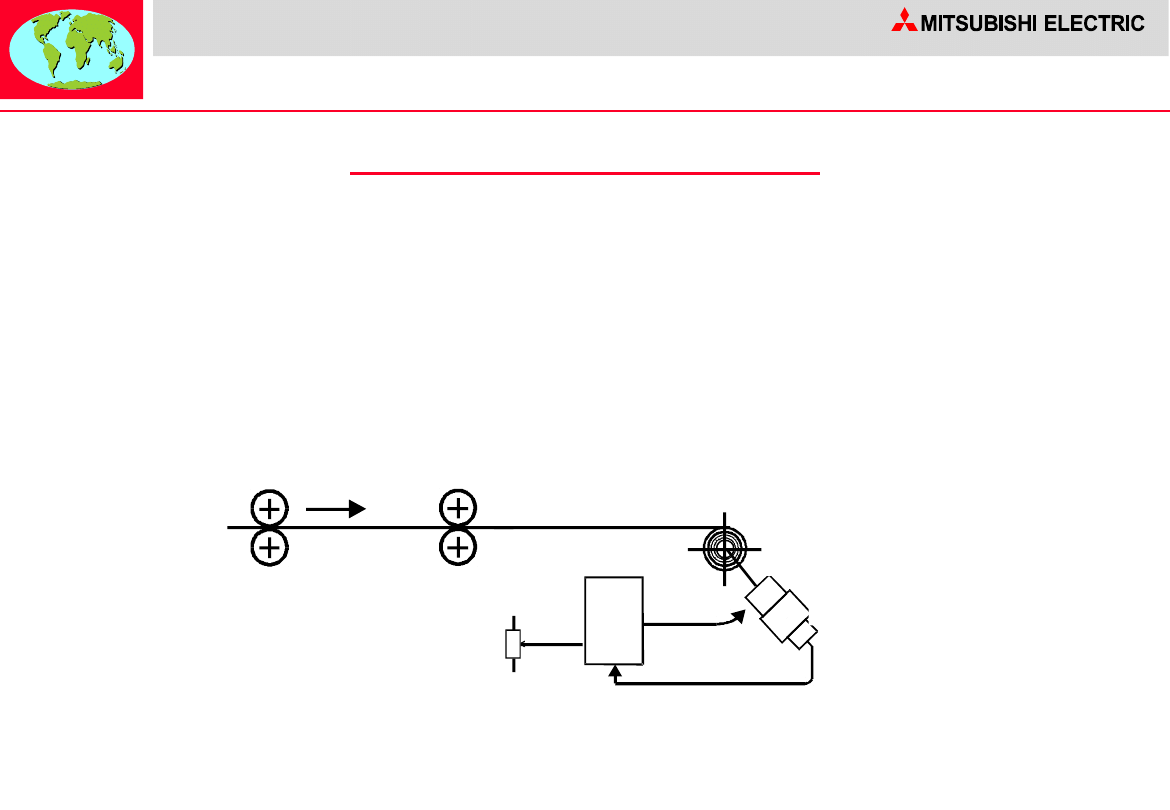
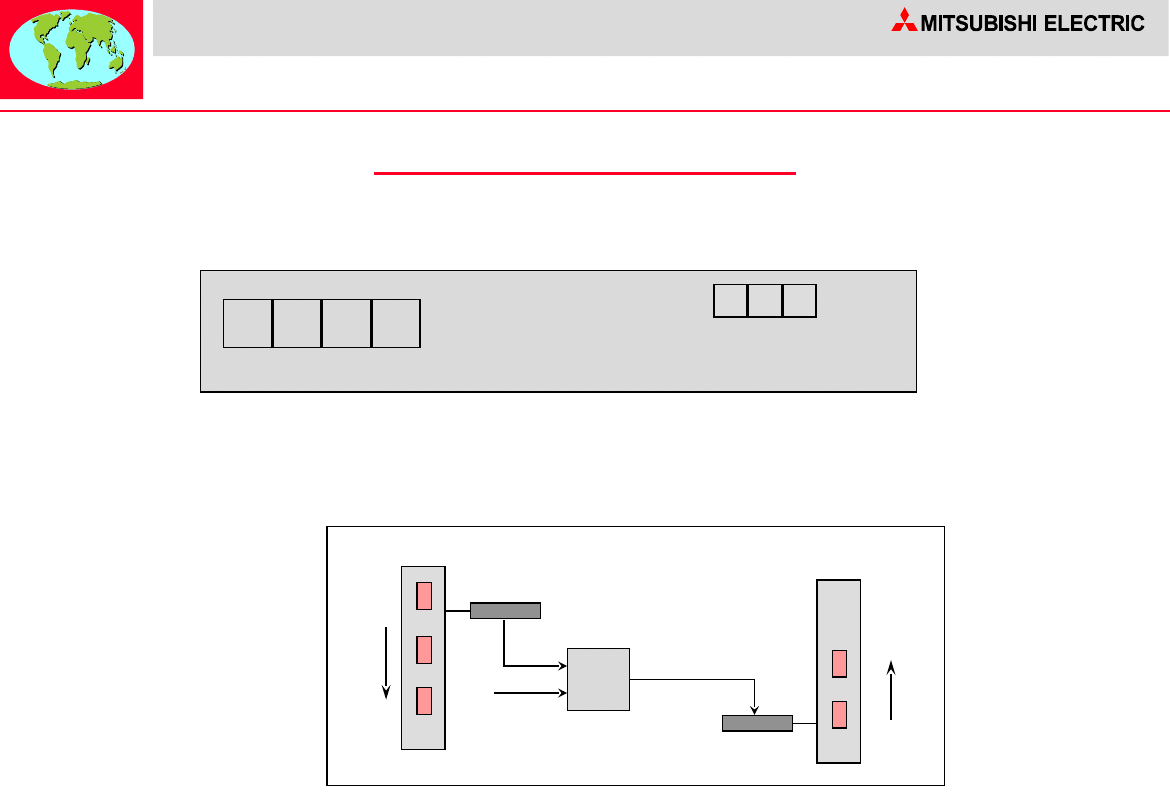
Regulacja momentu
Nawijarka
Serwosilnik
Przekładnia
Zadajnik
W trybie regulacji momentu wartością zadaną jest moment napędowy silnika,
zadawany najczęściej sygnałem analogowym.
Automatyka przemysłowa
Serwonapędy
18
MR-J2
MR-J2
S
S
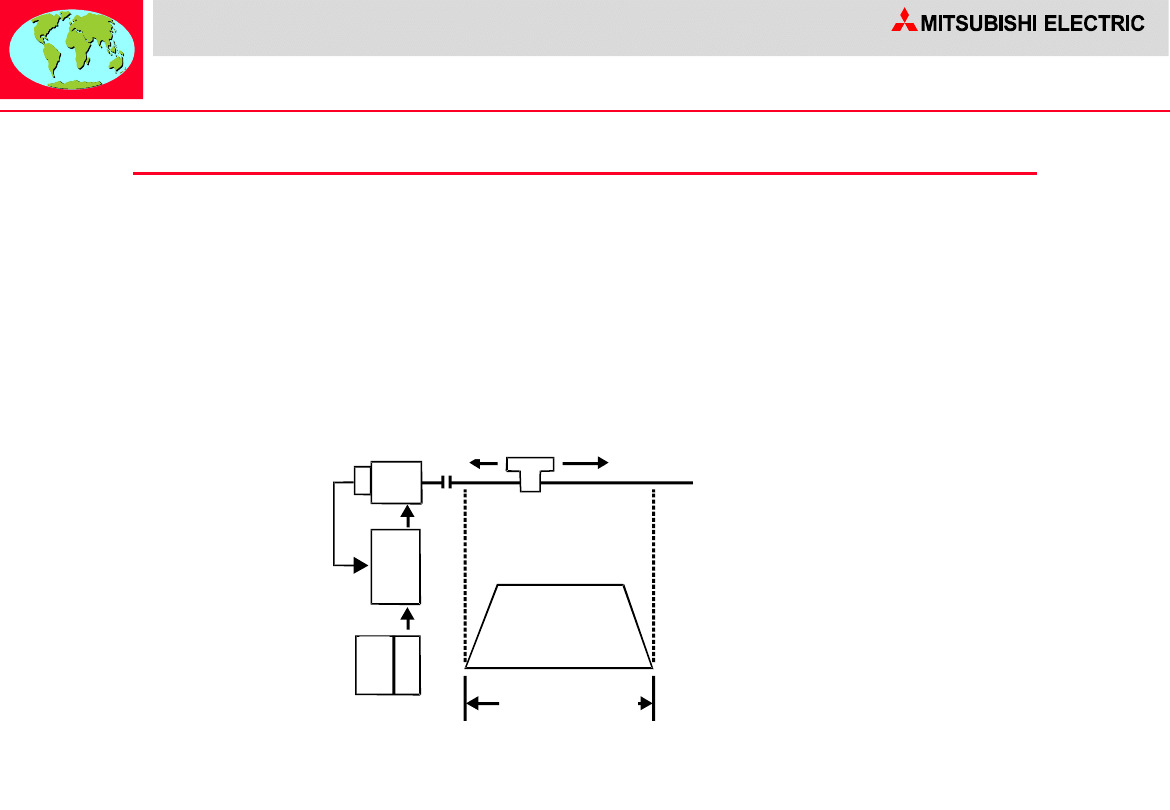
Regulacja położenia (pozycjonowanie)
Śruba pociągowa
Obiekt
Odległość
przemiesz-
czenia
Serwosilnik
Wz
m
A1SD75
P
L
C
Celem pozycjonowania jest taka regulacja prędkości obrotowej
silnika,
by przemieścić obiekt i zatrzymać go na zadanej pozycji.
Wartość zadana określana jest ciągiem impulsów.
Ilość impulsów określa odległość przemieszczenia, a częstotliwość –
prędkość silnika.
Automatyka przemysłowa
Serwonapędy
19
MR-J2
MR-J2
S
S
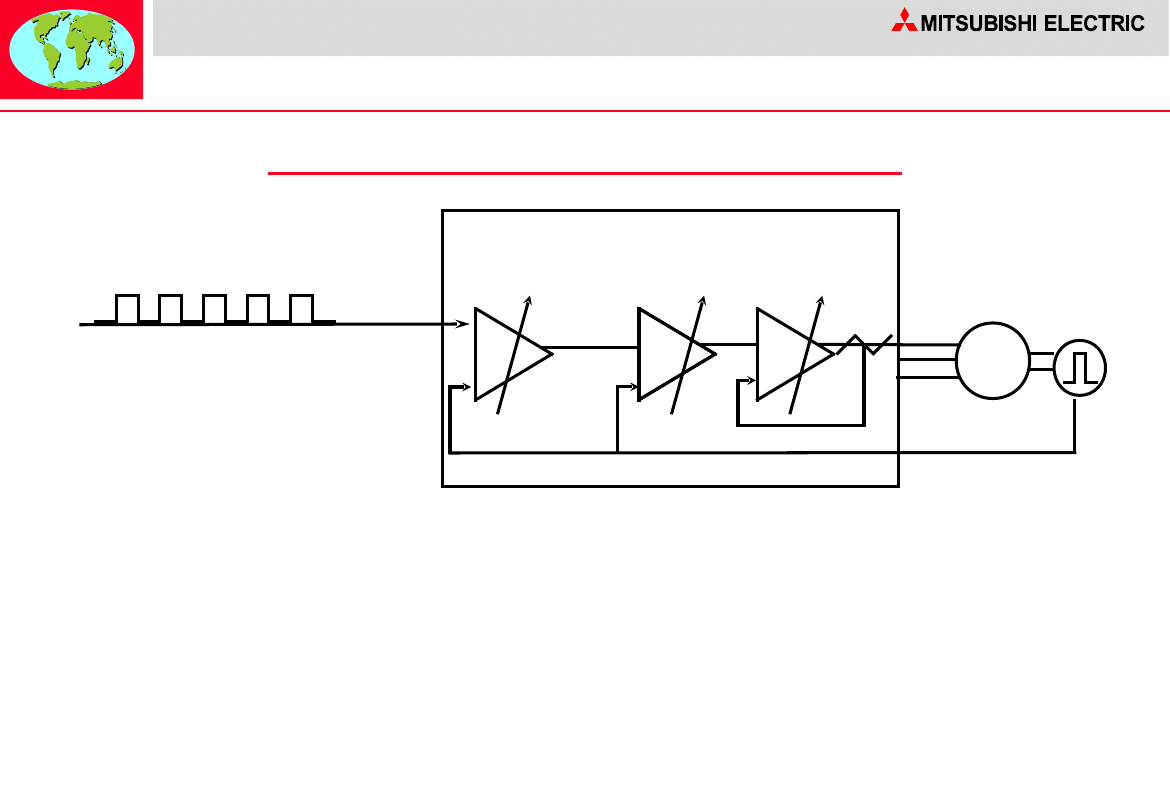
Zasada regulacji położenia
Ciągi impulsów z enkodera i z zadajnika są porównywane w
regulatorze położenia. Zmiana ilości impulsów wejściowych powoduje
zmianę prędkości silnika, aż różnica (uchyb) zmniejszy się do zera.
Uwaga:
Wartość zadana położenia jest określana przez liczbę impulsów
zadających.
Prędkość silnika jest określana przez częstotliwość impulsów.
Ciąg impulsów
M
3 ~
Regulator
położenia
Regulator
prędkości
Regulator
momentu
Automatyka przemysłowa
Serwonapędy
20
MR-J2
MR-J2
S
S
Serwonapędy AC
Serwonapędy AC
Mitsubishi Electric
Mitsubishi Electric
•
Seria MR-J2S-A/B,
Seria MR-J2S-A/B,
•
Seria MR-J2S-CL
Seria MR-J2S-CL
•
Seria MR-C
Seria MR-C
Automatyka przemysłowa
Serwonapędy
21
MR-J2
MR-J2
S
S
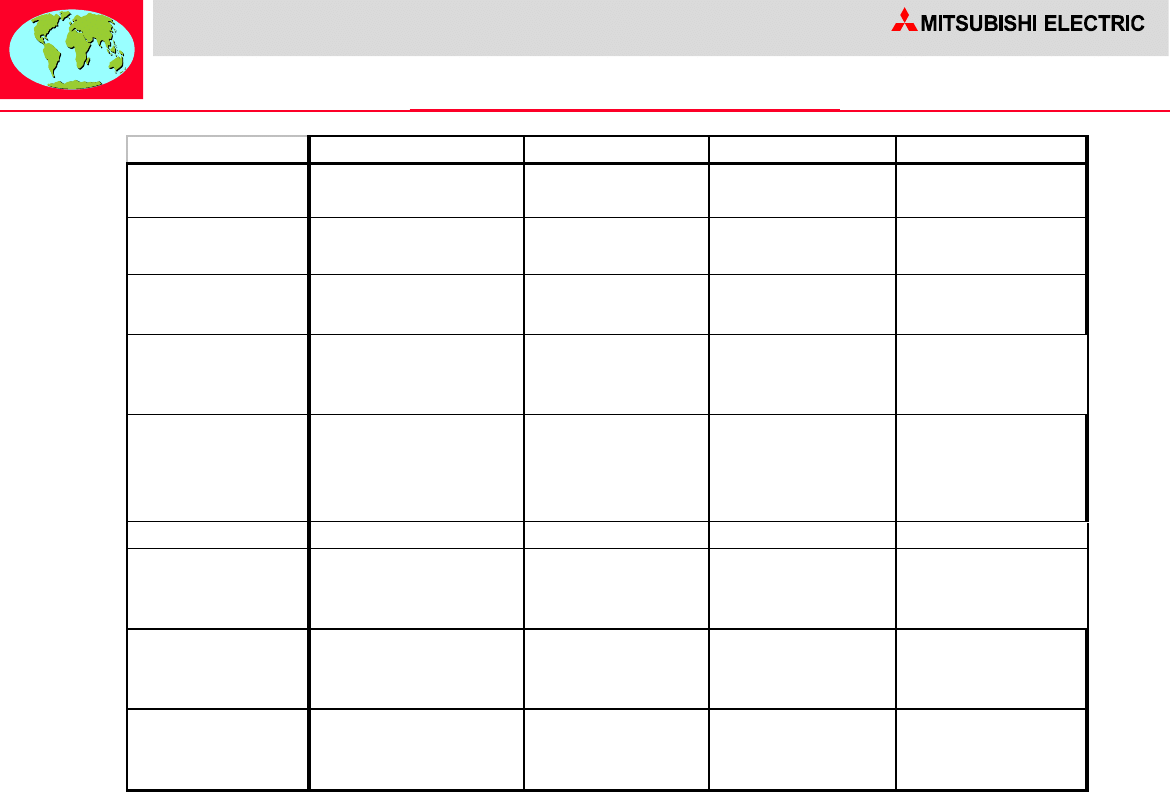
Zakres produktów
MR-J 2S-CL
MR-C
MR-J 2S-A
MR-J 2S-B
Zakres Mocy
kW
50W - 7kW
30W - 400W
50 W - 7kW
50W - 7 kW
Zakres Momentu
Nm
0,16 - 33,4
0,095 - 1,27
0,16 - 33,4
0,16 - 33,4
Zakres Moment
Maks. Nm
0,48 - 100
0,38 - 2,92
0,48 - 100
0,48 - 100
Tryb pracy
Położenie
Położenie
Moment,
Prędkość,
Położenie
Moment,
Prędkość,
Położenie
Sygnały
zewnętrzne
Sygnały binarne,
RS-232
Sygnały binarne,
Ciąg impulsów;
Sygnały binarne,
analogowe,
Ciąg impulsów; Magistrala
Tryb Absolutny
Tak
Nie
Tak
Tak
Silniki
HC-MFS; HC-KFS;
HC-SFS; HC-RFS
HC-PQ
HC-MFS; HC-
KFS; HC-SFS;
HC-RFS
HC-MFS; HC-
KFS; HC-SFS;
HC-RFS
Zasilanie
1~230V AC < 750
W; 3~220V AC
wszystkie
1~230V AC -
30W -> 400 W
1~230V AC <
750 W; 3~220V
AC wszystkie
1~230V AC <
750 W; 3~220V
AC wszystkie
Oprogramowanie
MRZJ W3-
SETUP55E wer
A*A
MRZJ W3-
SETUP51E wer
B*C
MRZJ W3-
SETUP 121E
MRZJ W3-
SETUP51E wer
B*C
Automatyka przemysłowa
Serwonapędy
22
MR-J2
MR-J2
S
S
Dane techniczne serwonapędów serii MR-
J2S
Moc znamionowa: 50 – 7000 [W]
Moment znamionowy: 0,16 – 33,4 [Nm]
Moment bezwładności silnika: 0,019 - 160 [kg x
cm˛]
Max. prędkość obrotowa: 3000 / 4500 [obr/min]
Zakres regulacji prędkości: 1 : 5000
Enkoder absolutny 17bit (131072 imp/obr.) –
standard
Max. częstotliwość ciągu impulsów: 500 [kHz]
Pasmo przenoszenia toru regulacji 550Hz (-3dB)
Zgodność ze standardami: EN, UL, CSA, GOST
Stopień ochrony IP 65 (silniki serii SFS, RFS), IP
55
Automatyczna identyfikacja dołączonego
serwosilnika
Autotuning w czasie rzeczywistym
Wbudowany układ hamowania (z rezystorem)
Automatyka przemysłowa
Serwonapędy
23
MR-J2
MR-J2
S
S
Ułatwione uruchomienie serwonapędu
MR-J2S
Nieprzerwany rozwój systemów napędowych prowadzi do
zwielokrotniania ilości funkcji użytkowych i odpowiadających im
parametrów, a w rezultacie – wzrostu złożoności urządzeń.
W rezultacie nawet doświadczeni specjaliści często nie są w stanie
zoptymalizować ustawień serwonapędu.
Jednym z priorytetów projektowych
serii MR-J2S było ułatwienie
uruchamiania przy jednoczesnej
wysokiej funkcjonalności wyrobu.
Automatyka przemysłowa
Serwonapędy
24
MR-J2
MR-J2
S
S
Automatyczne dostrajanie
Automatyczne dostrajanie
parametrów serwowzmacniacza do
parametrów serwowzmacniacza do
wielkości, parametrów i wymagań
wielkości, parametrów i wymagań
dynamicznych obciążenia
dynamicznych obciążenia
Autotuning
Automatyka przemysłowa
Serwonapędy
25
MR-J2
MR-J2
S
S
Inne czynniki, ułatwiające uruchomienie
serwonapędu serii MR-J2S
Szeregowa komunikacja z enkoderem
Automatyczna
identyfikacja
dołączonego silnika
Rozbudowana diagnostyka z użyciem
programów narzędziowych
Automatyka przemysłowa
Serwonapędy
26
MR-J2
MR-J2
S
S
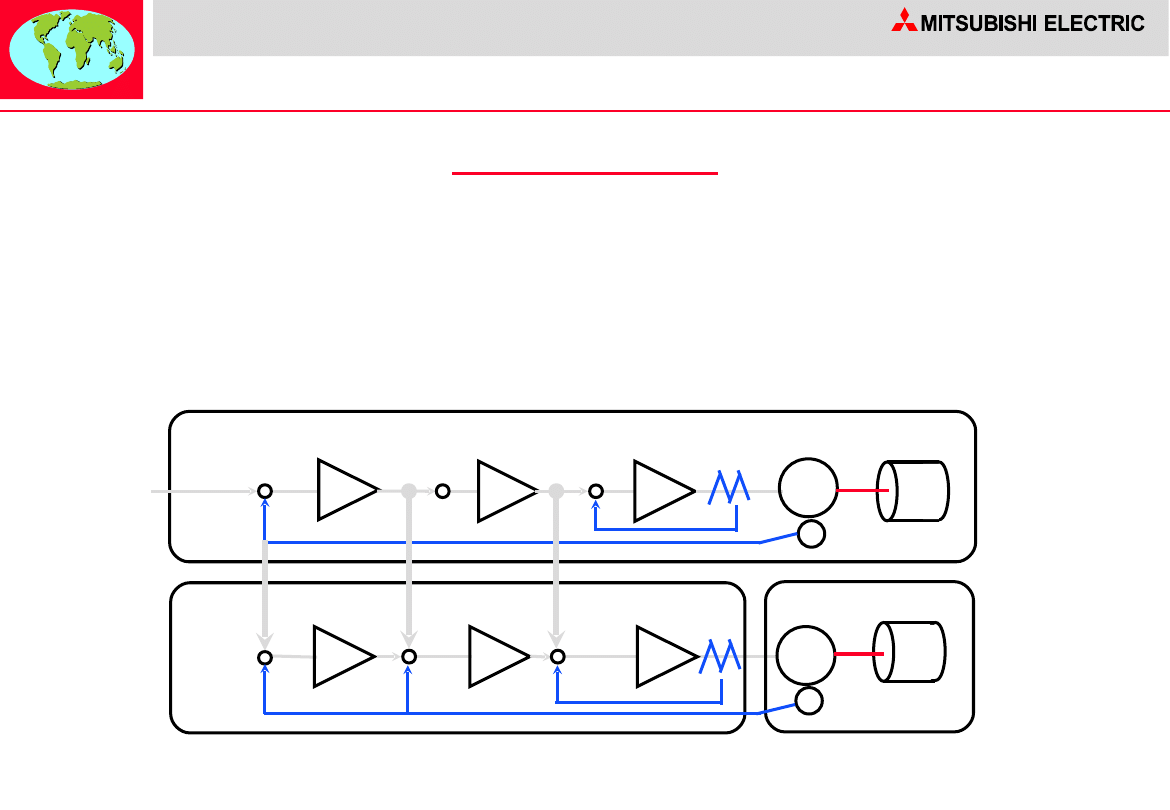
Autotuning
Obliczenia na modelu napędu
Pomiar wielkości w rzeczywistym napędzie
Porównanie wyników przez 32-bitowy procesor RISC
Ciągła optymalizacja parametrów wzmocnienia
P
S
C
P
S
C
M
Obc.
M
Obc.
+
-
Zadawanie
Położenie
Prędkość
Prąd
Położenie
Prędkość
Prąd
Rzeczywista
pętla
regulacji
Model
Automatyka przemysłowa
Serwonapędy
27
MR-J2
MR-J2
S
S
Ustawienie poziomu reakcji dla
autotuningu
1 2 3 4 5 6 7 8 9 A B C D E F
Reakcja
Współczynniki
wzmocnienia
regulatorów
niskie
wysokie
Charakterystyki
maszyny:
Niska sztywność
Luzy
mechaniczne
Duża J
L
Niska częstotliwość rezonansu
Wysoka
sztywność
Bezpośrednie
połączenie
mechaniczne
Mała J
L
Wysoka często-
tliwość
rezonansu
Automatyka przemysłowa
Serwonapędy
28
MR-J2
MR-J2
S
S
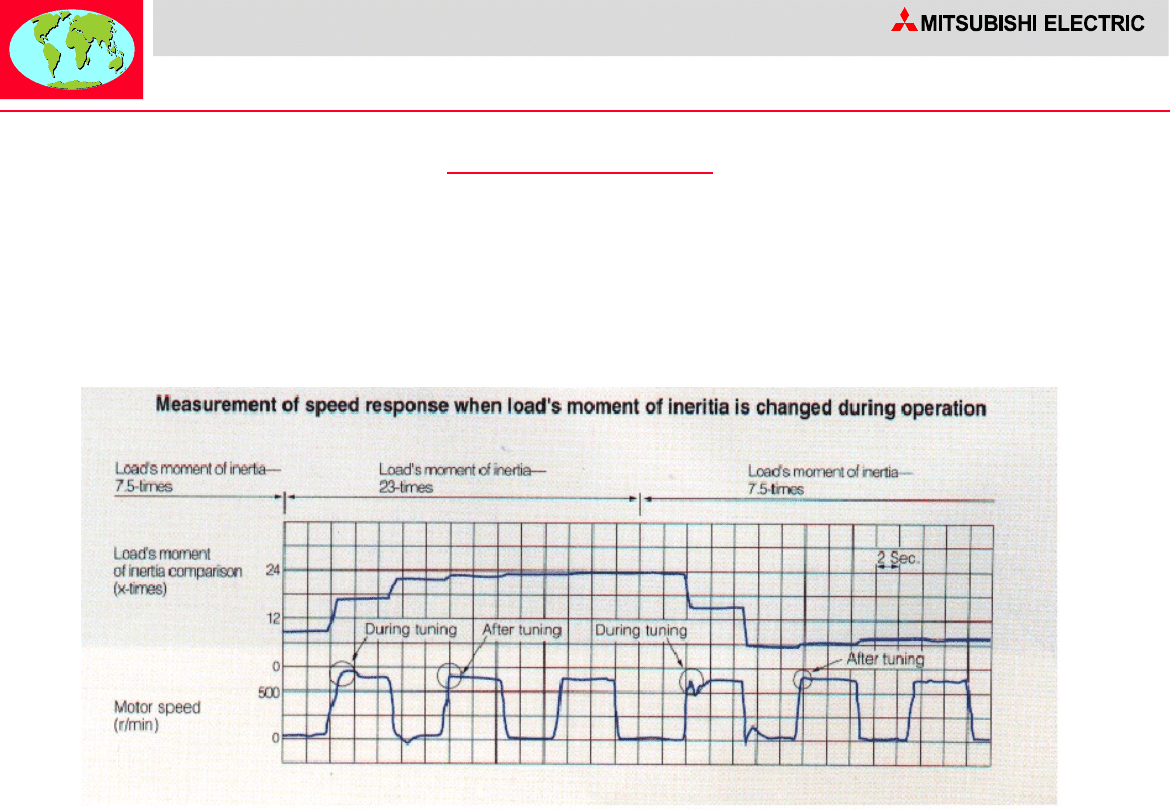
Autotuning
Parametry dynamiczne regulatora serwowzmacniacza są w sposób
ciągły dopasowywane do rzeczywistego obciążenia, poprzez
obliczenia wykonywane na bieżąco z użyciem modelu systemu.
W wyniku uzyskujemy stabilną regulację, nawet w napędach ze
znacznie zmieniającym się obciążeniem, jak np. podajniki i
podnośniki.
Automatyka przemysłowa
Serwonapędy
29
MR-J2
MR-J2
S
S
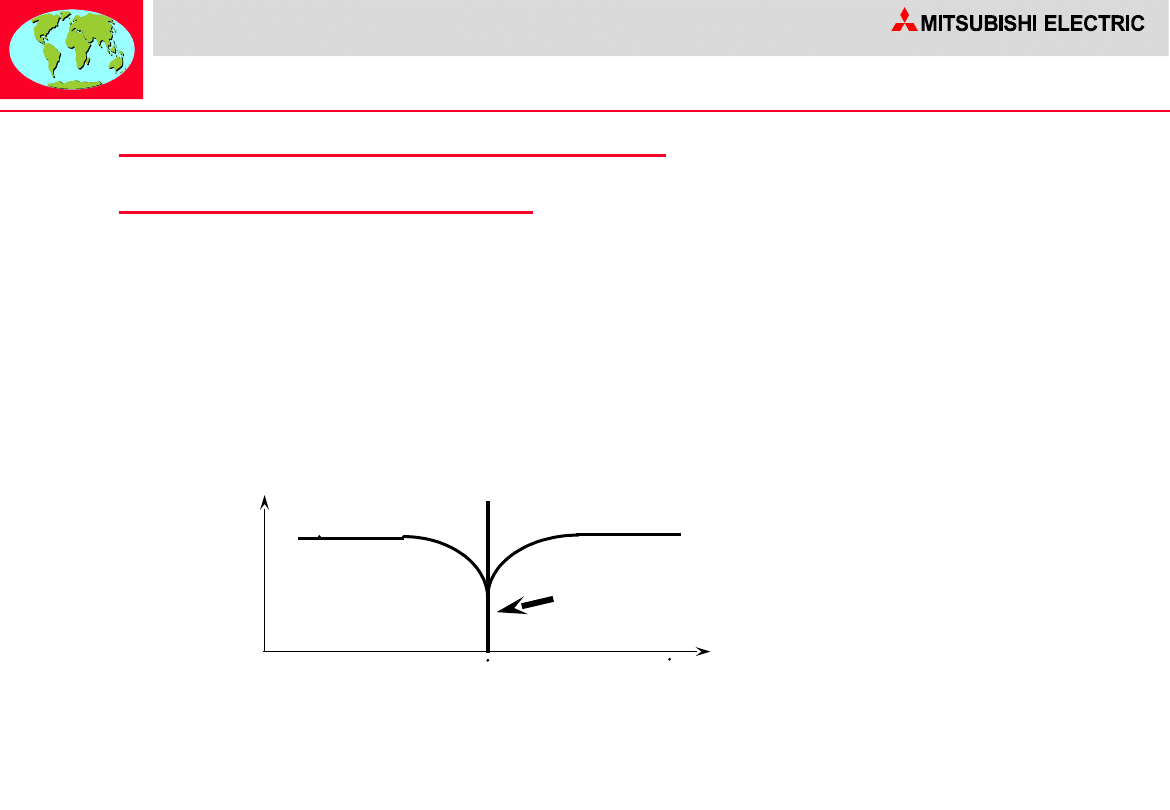
Wąskopasmowy filtr
antywibracyjny
Cyfrowy filtr zaporowy
• Filtr zmniejsza wzmocnienie dla częstotliwości, odpowiadającej
punktowi rezonansowemu maszyny, by wytłumić wibracje.
• Częstotliwość i tłumienie filtru są zadawane parametrami
• Jednocześnie mogą być użyte dwa filtry (Pr. 58, 59)
Częstotliwość
(Hz)
Filtr
zaporow
y
Punkt rezonansowy
maszyny
Wzmocnieni
e
regulatora
Automatyka przemysłowa
Serwonapędy
30
MR-J2
MR-J2
S
S
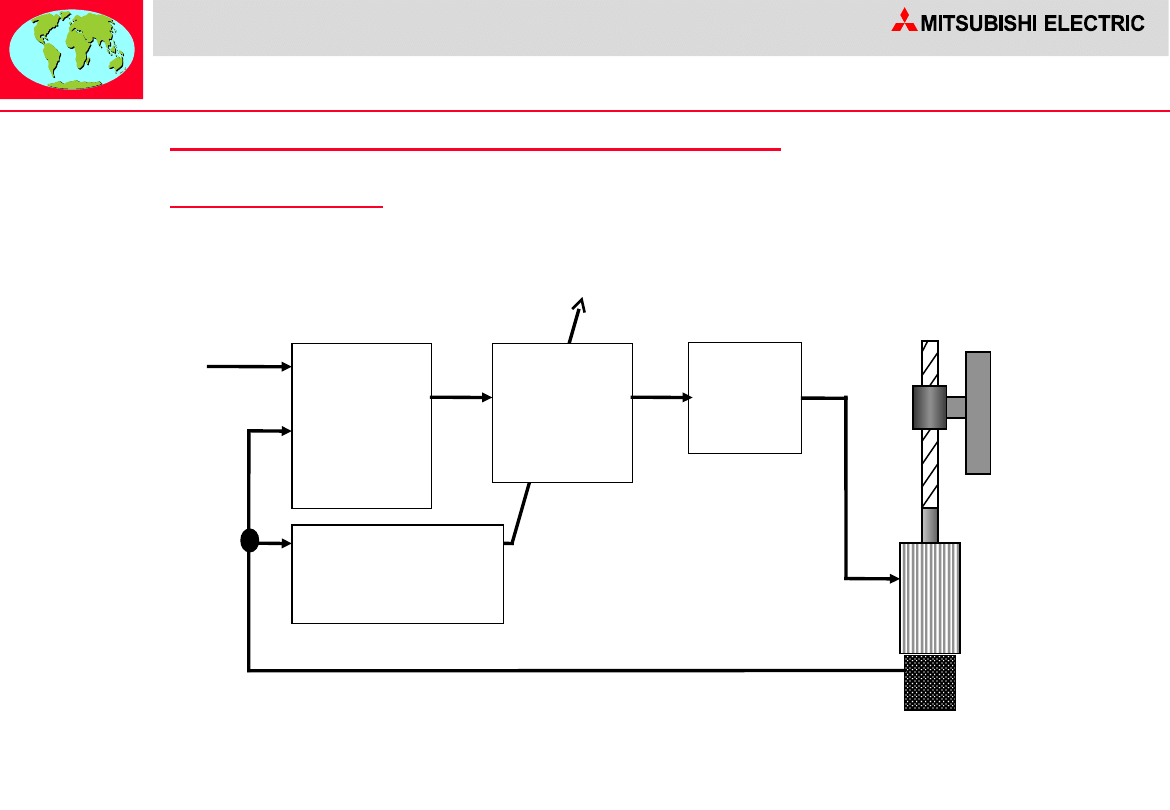
Adaptacyjne tłumienie
wibracji
Częstotliwość rezonansowa oraz amplituda wibracji jest
automatycznie wykrywana w czasie rzeczywistym
Serwosilnik
Enkoder
Obciążenie
Regulator
momentu
Regulator
adaptacyjny
(Tryb: P, S)
Sygnał zadający
Filtr
antywibracyj
ny
Obliczanie często-
tliwości wibracji
Automatyka przemysłowa
Serwonapędy
31
MR-J2
MR-J2
S
S
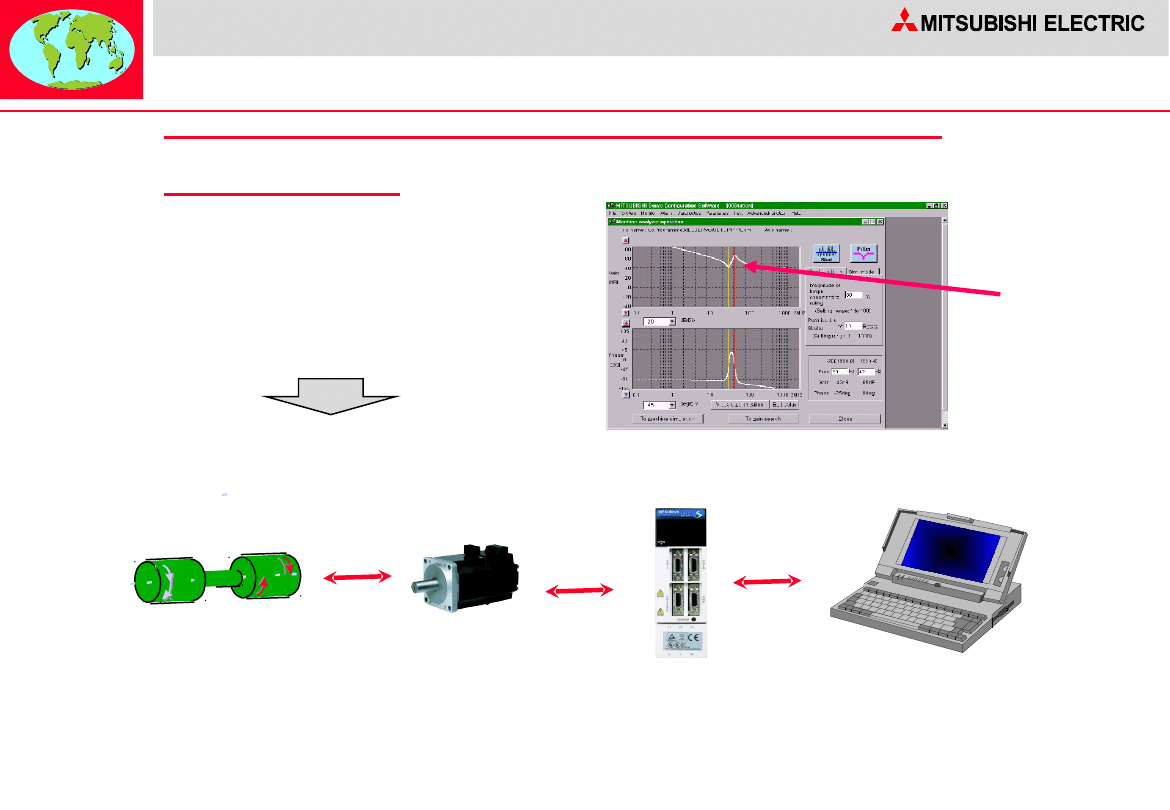
Oprogramowanie: Analizator
maszyny
Poprzez krótkotrwałe wzbudzanie
ruchów wibracyjnych silnika
wykonywana jest analiza
częstotliwości rezonansowych
maszyny
Pomiar
zjawisk
rezonan-
sowych
Czas trwania ...
Ok. 30 s
• Diagnoza danych z układu mechanicznego
• Najlepsze wyniki uzyskuje się przez kombinację z
symulatorem maszyny
Automatyka przemysłowa
Serwonapędy
32
MR-J2
MR-J2
S
S
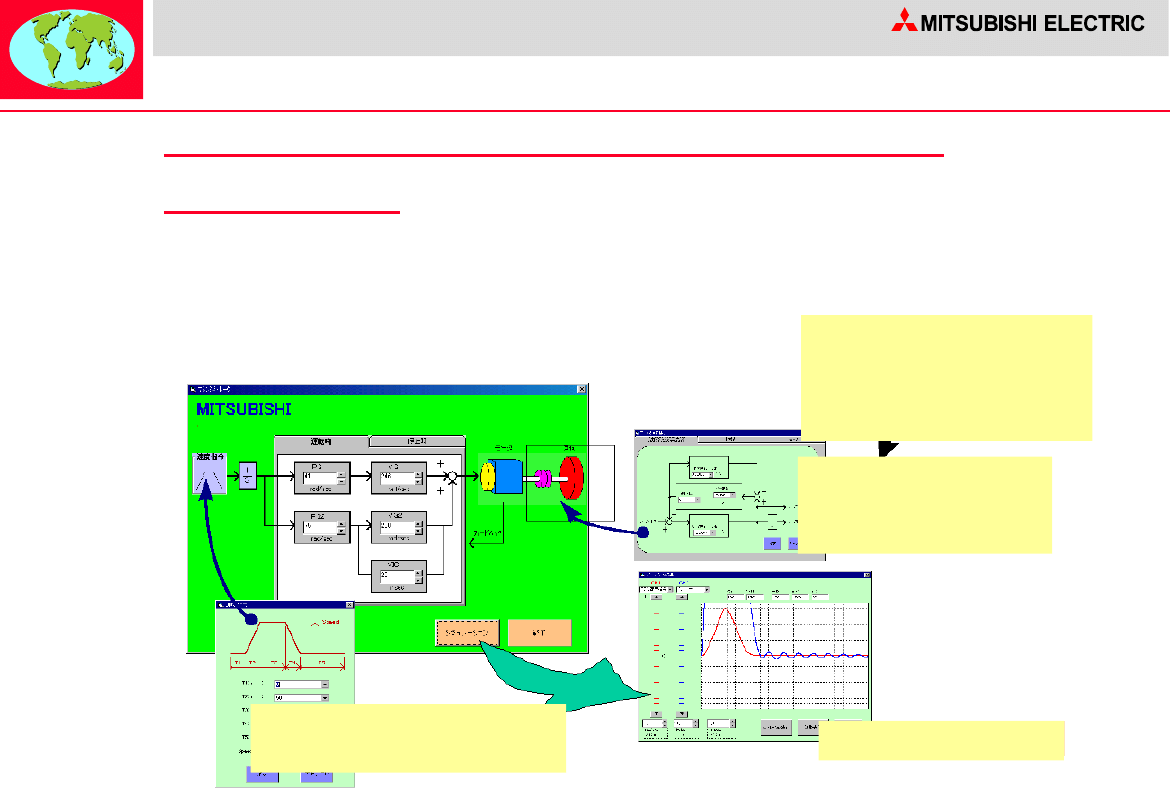
Oprogramowanie: Symulator
maszyny
Wprowadzanie
parametrów
mechanicznych
Wprowadzanie danych
o sygnałach zadających
Wyniki symulacji
Możliwe jest także
wprowadzenie
danych z Analizatora
maszyny
•Badanie zachowania się maszyny w stadium projektu bez użycia
rzeczywistej maszyny
•Wstępne ustalenie optymalnych ustawień bez wykonywania
rzeczywistych ruchów i ryzyka uszkodzeń
Automatyka przemysłowa
Serwonapędy
33
MR-J2
MR-J2
S
S
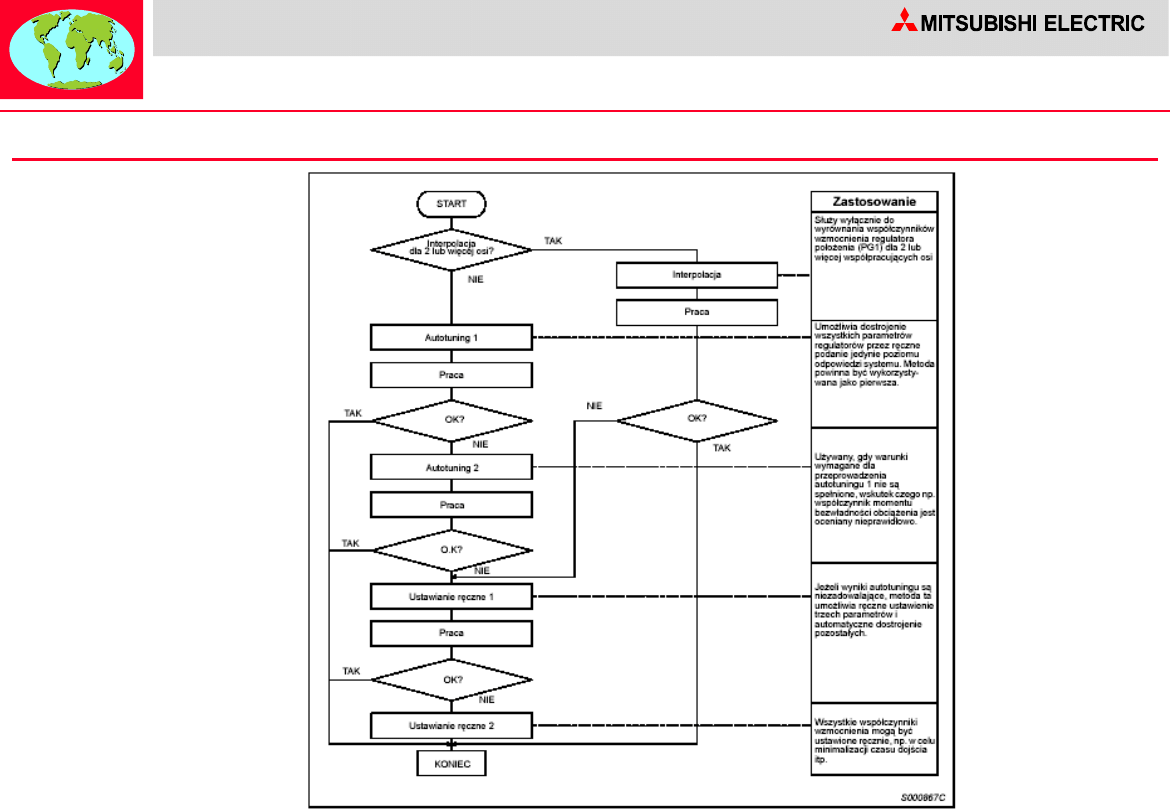
Zasady
dostrajania
W celu uzyskania optymalnych parametrów regulatora:
- najpierw wykonaj autotuning w trybie 1 (ustawienie domyślne).
Jeżeli wyniki nie są zadowalające:
- wykonuj autotuning w trybie 2,
- następnie tryb ręczny 1 i tryb ręczny 2 – w tej kolejności.
Dostępne tryby
dostrajania:
• Auto tuning mode 1
• Auto tuning mode 2
• Manual mode 1
• Manual mode 2
• Interpolation mode
Automatyka przemysłowa
Serwonapędy
34
MR-J2
MR-J2
S
S
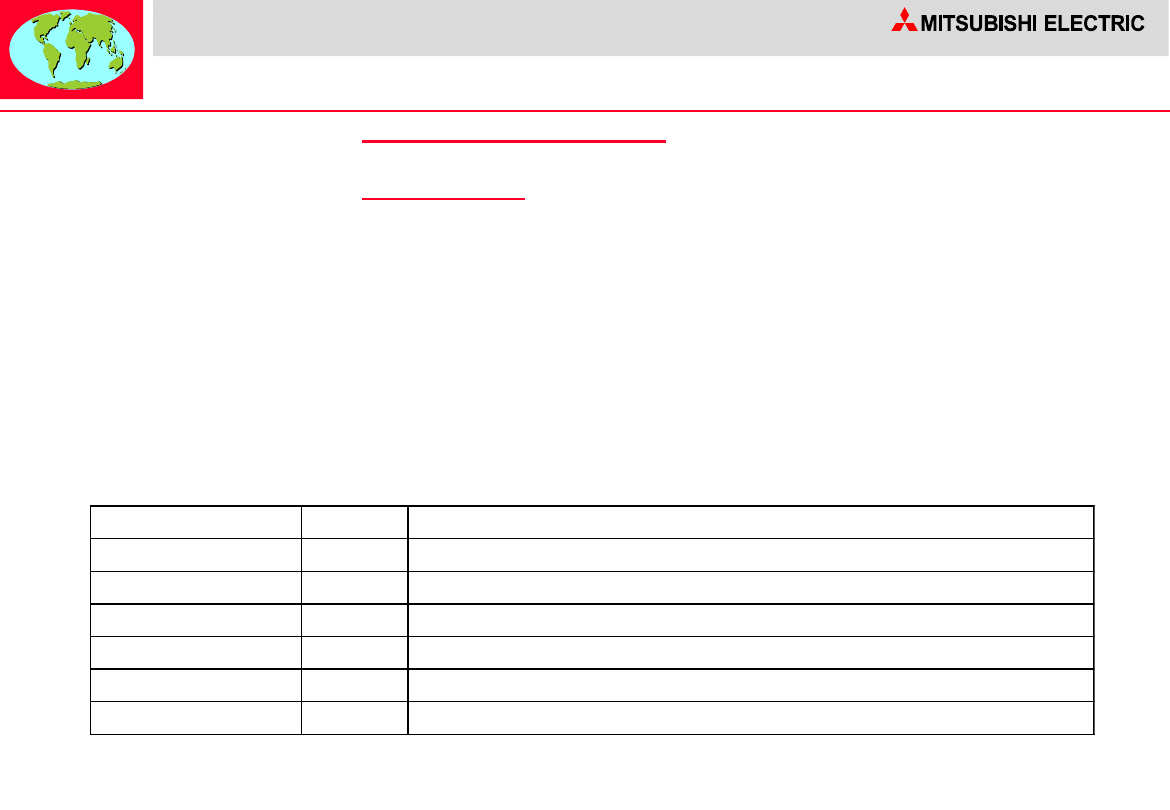
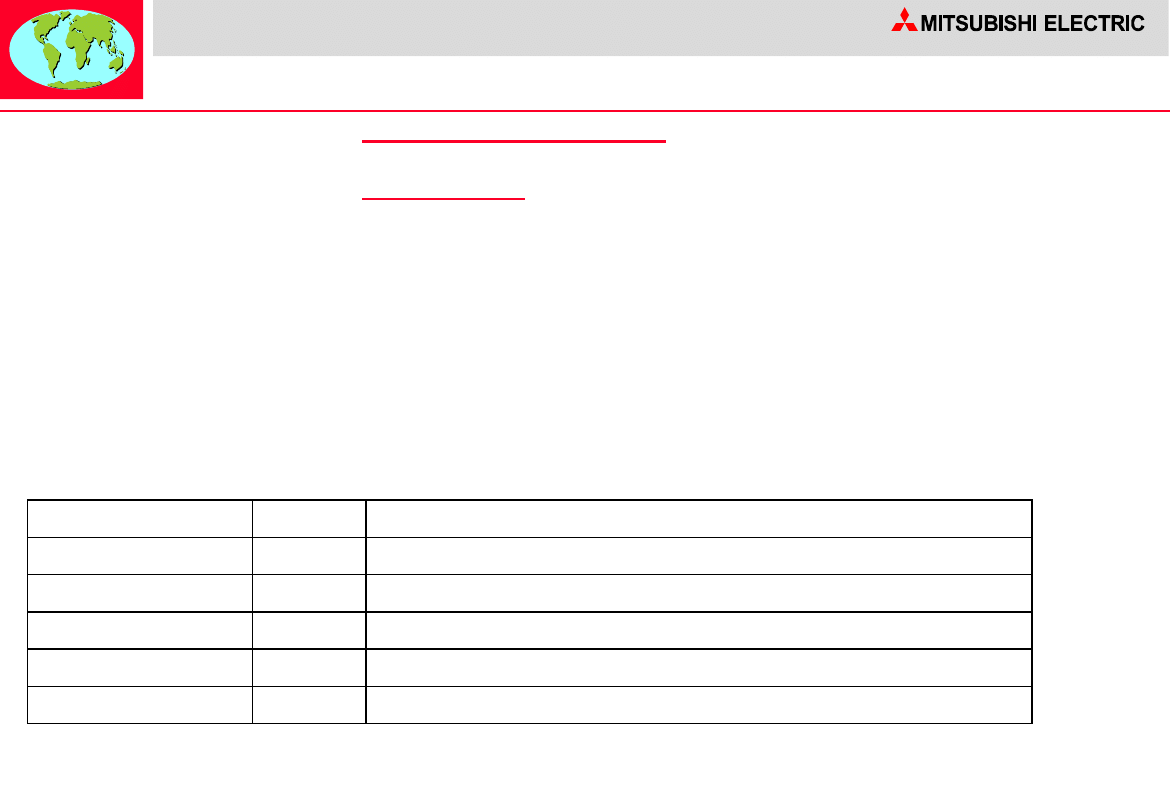
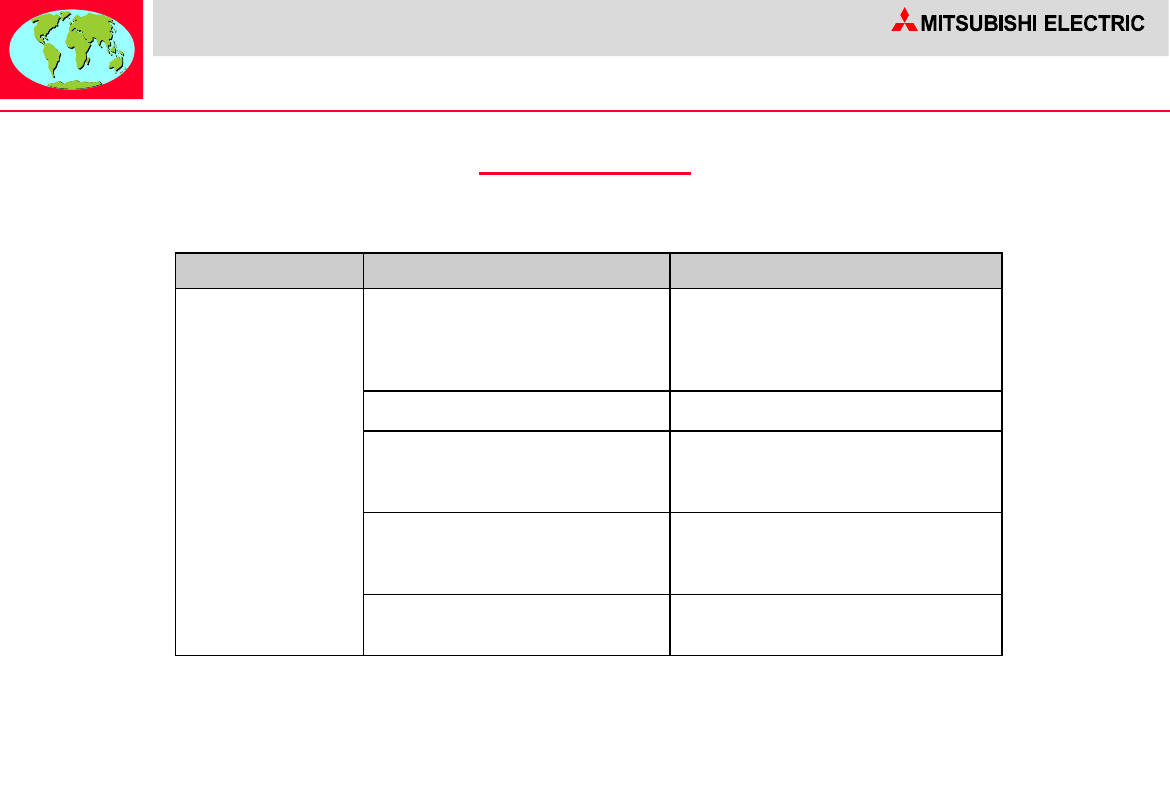
Ogólne zasady optymalizacji wzmocnień
Tryb dostrajania
wzmocnień
Wartość
Pr. 2
Wyznaczanie współczynnika
bezwładności obciążenia
Parametry, ustawiane
automatycznie
Parametry, ustawiane
ręcznie
Autotuning tryb 1
(wartość domyślna)
010
x
Zawsze wyznaczany
PG1 (Pr. 6)
GD2 (Pr. 34)
PG2 (Pr. 35)
VG1 (Pr. 36)
VG2 (Pr. 37)
VIC (Pr. 38)
Poziom reakcji - Pr. 2
Autotuning tryb 2
020
x
PG1 (Pr. 6)
PG2 (Pr. 35)
VG1 (Pr. 36)
VG2 (Pr. 37)
VIC (Pr. 38)
GD2 (Pr. 34)
Poziom reakcji - Pr. 2
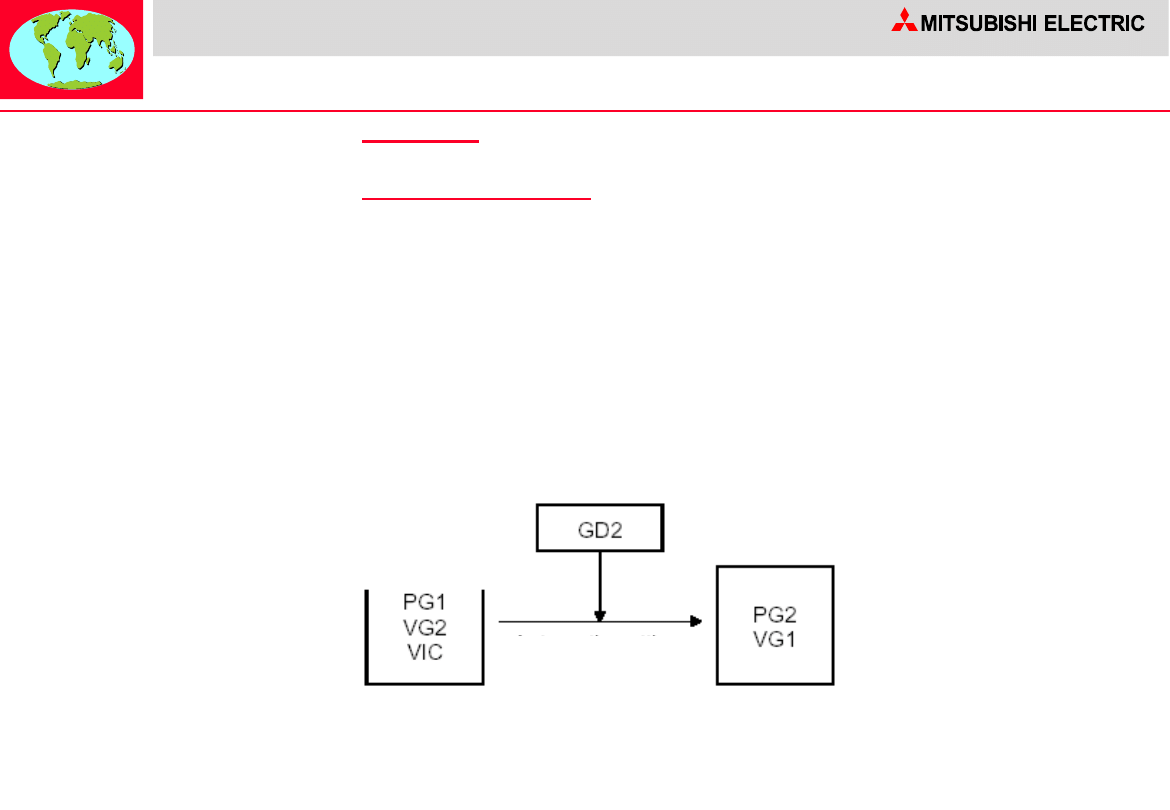
Tryb ręczny 1
030
x
PG2 (Pr. 35)
VG1 (Pr. 36)
GD2 (Pr. 34)
Poziom reakcji - Pr. 2
PG1 (Pr. 6)
VG2 (Pr. 37)
VIC (Pr. 38)
Tryb ręczny 2
040
x
Ustalony w Pr. 34
X
PG1 (Pr. 6)
GD2 (Pr. 34)
PG2 (Pr. 35)
VG1 (Pr. 36)
VG2 (Pr. 37)
VIC (Pr. 38)
Tryb interpolacji
000
x
Zawsze wyznaczany
GD2 (Pr. 34)
PG2 (Pr. 35)
VG2 (Pr. 37)
VIC (Pr. 38)
PG1 (Pr. 6)
VG1 (Pr. 36)
Automatyka przemysłowa
Serwonapędy
35
MR-J2
MR-J2
S
S
Zalety użytkowe serwonapędów serii MR-
J2S
Nadzwyczaj zminiaturyzowane silniki z niskim moment bezwładności
Enkoder absolutny eliminuje konieczność powrotu do punktu zerowego
Proste sterowanie, w 100% kompatybilne z silnikami krokowymi przy
mniejszych gabarytach i lepszych charakterystykach momentu
Wysoka dynamika, szerokie pasmo przenoszenia regulatorów
Bardzo szeroki zakres mocy – 50W do 7kW (wersja 3x400V do 55kW)
Łatwe uruchomienie dzięki funkcji autotuning (automatyczne dostrajanie)
Automatyczne dostrojenie napędu do zmiennego momentu obciążenia
(tarcie, zmiana masy),
Automatyczna eliminacja punktów rezonansowych
Łatwa modyfikacja parametrów dzięki oprogramowaniu
dla Windows (komunikacja poprzez RS232/RS422)
Dostępna jest wersja z wbudowanym sterownikiem położenia (seria -CL)
Automatyka przemysłowa
Serwonapędy
36
MR-J2
MR-J2
S
S
Ogólny algorytm optymalizacji wzmocnień
Automatyka przemysłowa
Serwonapędy
37
MR-J2
MR-J2
S
S
Autotuning
tryb 1
Serwowzmacniacz jest fabrycznie ustawiony
w trybie
auto tuning mode 1
.
W tym trybie jest stale wykonywana ocena współczynnika
momentu bezwładności obciążenia i automatycznie
ustawiane optymalne wartości współczynników
wzmocnienia. Jako wynik wpisywane są automatycznie
wartości poniższych parametrów:
Nr parametru Skrót
Nazwa
6
PG1 Wzmocnienie 1 regulatora położenia
34
GD2 Współczynnik momentu bezwładności obciążenia
35
PG2 Wzmocnienie 2 regulatora położenia
36
VG1 Wzmocnienie 1 regulatora prędkości
37
VG2 Wzmocnienie 2 regulatora prędkości
38
VIC Kompensacja całkująca regulatora prędkości
Automatyka przemysłowa
Serwonapędy
38
MR-J2
MR-J2
S
S
Autotuning
tryb 1
Autotuning w trybie 1 może nie zostać wykonany prawidłowo, jeżeli
nie są spełnione następujące warunki:
• Czas rozpędzania do 2000 obr/min nie przekracza 5s
• Prędkość jest nie mniejsza, niż 150 obr/min
• Stosunek momentu bezwładności obciążenia do momentu
bezwładności silnika nie przekracza 100
• Moment rozpędzania / hamowania nie jest mniejszy, niż 10%
momentu znamionowego.
Autotuning może także nie przebiegać prawidłowo w warunkach
znacznych wahań momentu obciążenia podczas rozpędzania /
hamowania lub jeśli w maszynie występują ekstremalnie duże luzy.
W takich przypadkach należy użyć autotuningu w trybie 2 lub trybu
ręcznego.
Automatyka przemysłowa
Serwonapędy
39
MR-J2
MR-J2
S
S
Autotuning
tryb 2
Autotuningu w trybie 2 należy użyć, gdy użycie autotuningu w trybie 1
nie daje pożądanych wyników.
Ponieważ w tym trybie współczynnik momentu bezwładności obciążenia
nie jest oceniany, należy w parametrze 34 wpisać jego poprawną
wartość.
W wyniku wykonania autotuningu w trybie 2 są automatycznie
dostrajane poniższe parametry:
Nr parametru Skrót
Nazwa
6
PG1 Wzmocnienie 1 regulatora położenia
35
PG2 Wzmocnienie 2 regulatora położenia
36
VG1 Wzmocnienie 1 regulatora prędkości
37
VG2 Wzmocnienie 2 regulatora prędkości
38
VIC Kompensacja całkująca regulatora prędkości
Automatyka przemysłowa
Serwonapędy
40
MR-J2
MR-J2
S
S
Tryb
ręczny 1
Jeżeli dostrajanie przy pomocy autotuningu nie dało zadowalających
wyników, można wykonać uproszczone dostrajanie ręczne,
przy użyciu
trzech parametrów
.
W tym trybie ręcznie ustawia się wartości trzech wzmocnień:
PG1
(wzmocnienie regulatora położenia 1),
VG2
(wzmocnienie regulatora
prędkości 2) oraz
VIC
(kompensacja całkująca regulatora prędkości), po
czym
pozostałe wartości wzmocnień dostrajane są automatycznie,
z
optymalizacją do wartości wprowadzonych ręcznie.
Uwaga: Konieczne jest poprawne wprowadzenie współczynnika
momentu bezwładności obciążenia (Pr. 34)!
Wartości wprowadzane przez
użytkownika
Dostrajanie
automatyczne
Automatyka przemysłowa
Serwonapędy
41
MR-J2
MR-J2
S
S
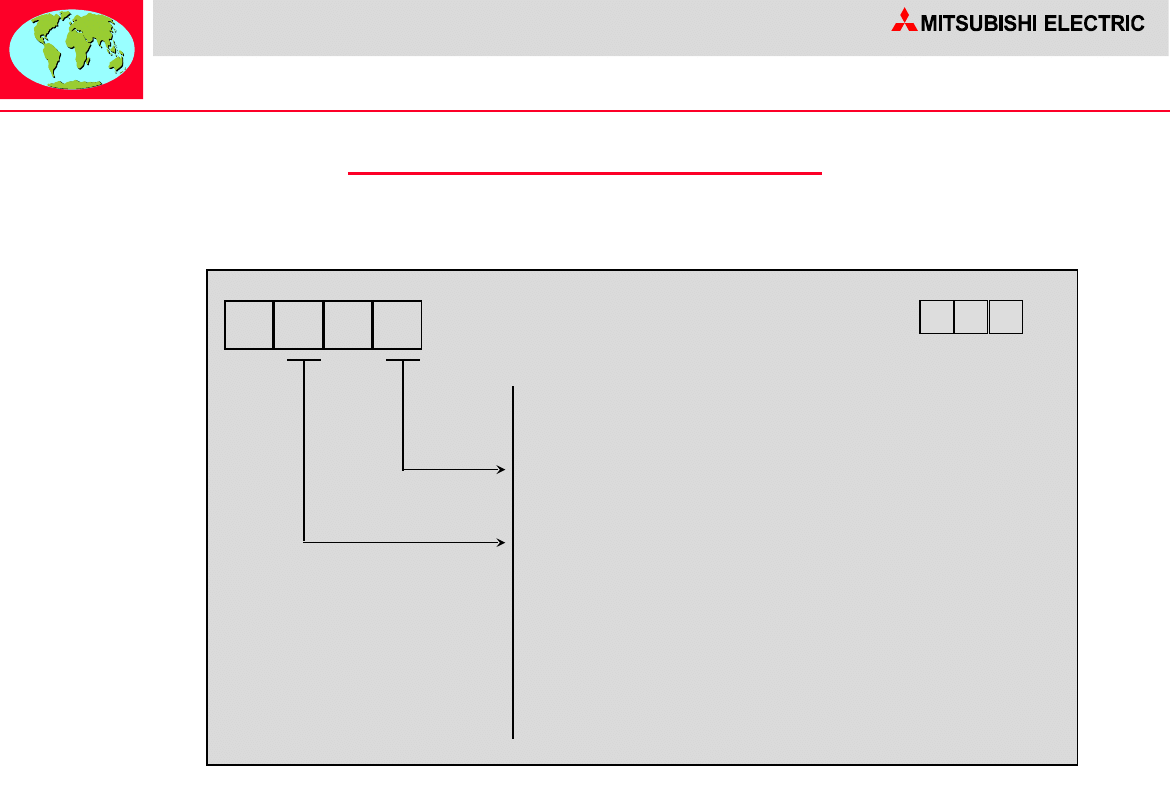
Modele serwowzmacniaczy
MR-J2S- A
Symbol
Odpowiedni serwosilnik
(moc) HC-KFS HC-MFS HC-SFS HC-RFS
10
053 / 13 053 / 13
X
X
20
23
23
X
X
40
43
43
X
X
60
X
X
52
X
70
73
73
X
X
100
X
X
102
X
200
X
X
152 / 202 103 / 153
350
X
X
352
203
500
X
X
502
353 / 503
700
X
X
702
X
Serwowzmacniacz
Mitsubishi Electric
Seria J2S
Serwo AC
ogólnego
stosowania
brak
3 x 200...240V
1 x 200...240V (Uwaga)
Uwaga: tylko MR-J 2S-10A…70A
Automatyka przemysłowa
Serwonapędy
42
MR-J2
MR-J2
S
S
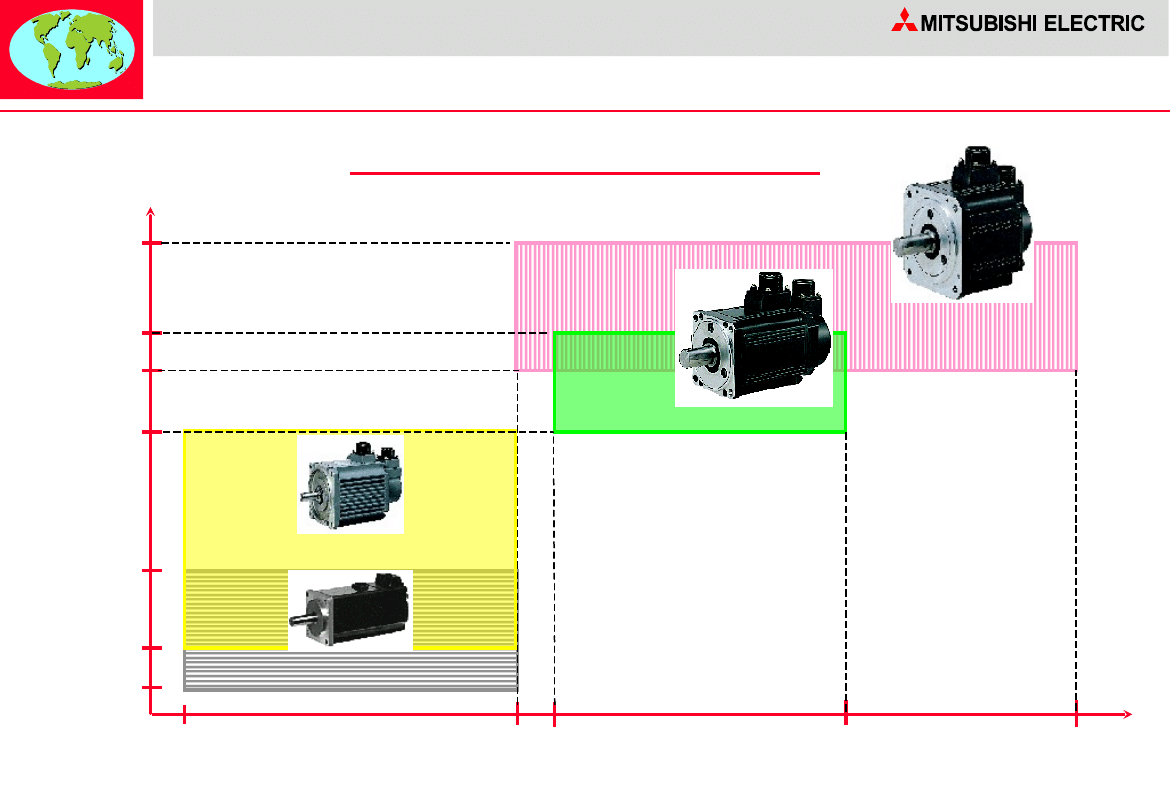
Serie serwosilników
Moment znamionowy
[Nm]
M
o
m
e
n
t
b
e
zw
ła
d
n
o
śc
i
[
kg
x
c
m
2
]
0,16
2,43,18
15,9
33,4
HC-MFS
HC-
KFS
0,019
0,6
1,5
160,0
0,053
12,0
HC-SFS
6,6
HC-RFS
Automatyka przemysłowa
Serwonapędy
43
MR-J2
MR-J2
S
S
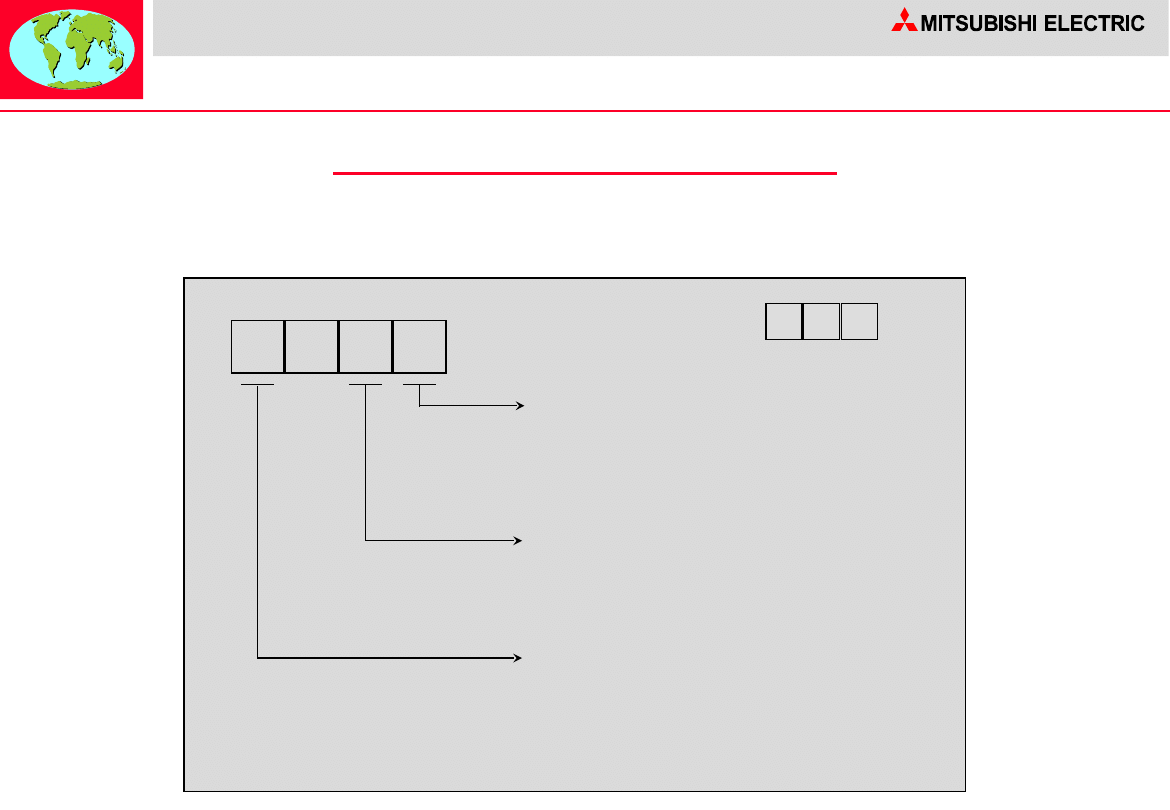
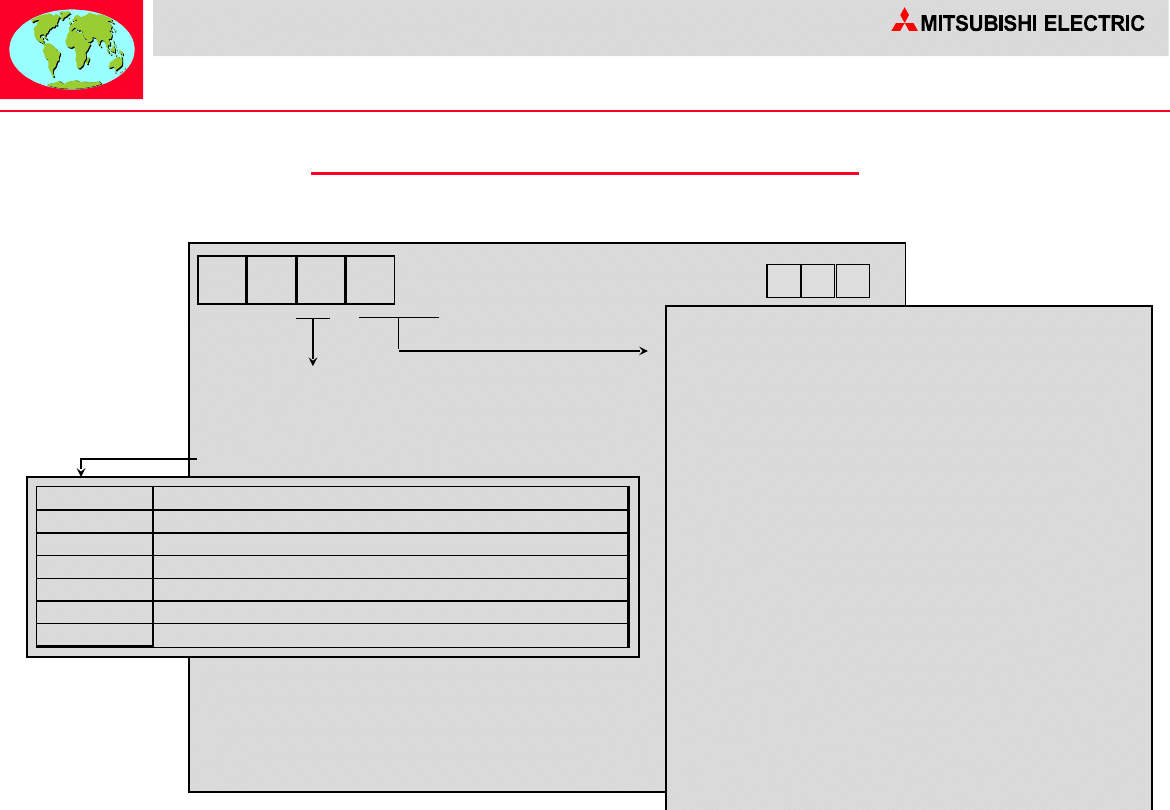
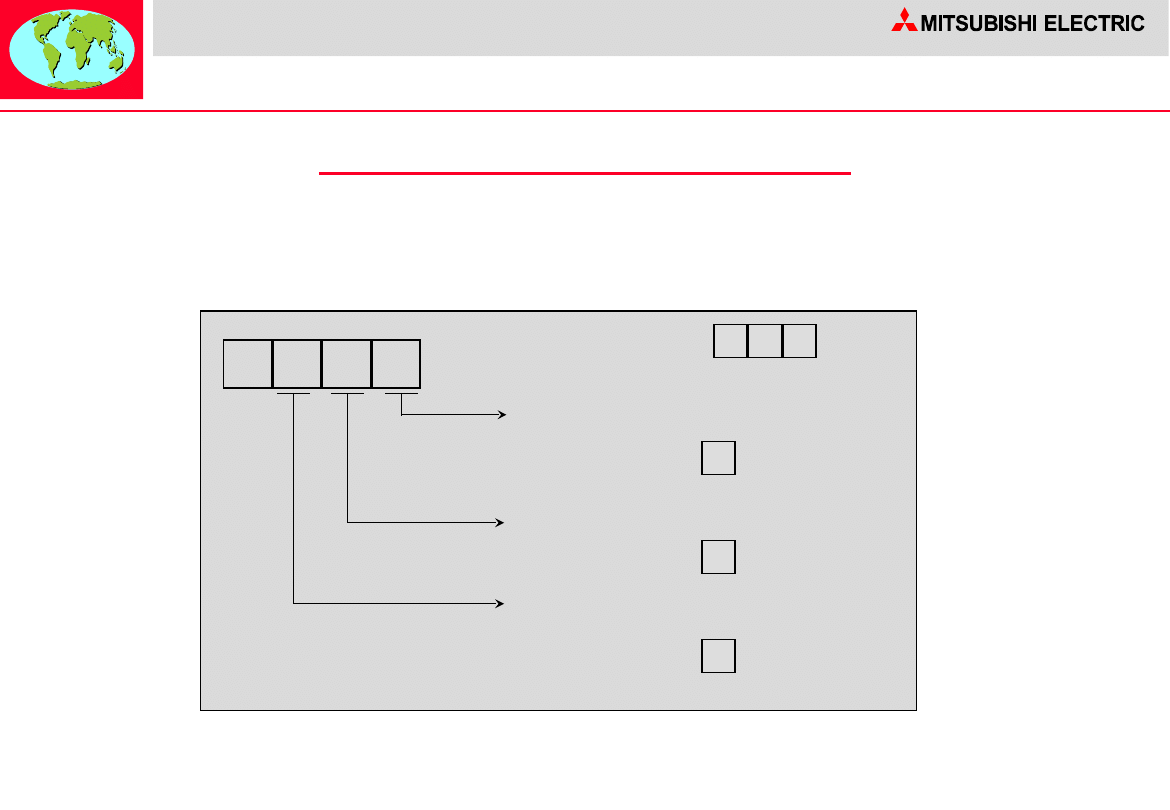
Modele serwosilników
HC-MFS
Symbol Moc znam. [W] Symbol Moc znam. [W]
05
50
7
750
1
100
10
1000
2
200
15
1500
3
300
20
2000
4
400
35
3500
5
500
50
5000
6
600
70
7000
Symbol Obr. znam.[obr/min]
2
2000
3
3000
Symbol Hamulec elektromagn.
brak
bez hamulca
B
z hamulcem
Kod Bezwładność
MFS bardzo niska
KFS podwyższona
SFS średnia
RFS obniżona
Kod rodziny
serwowzmacniaczy
Automatyka przemysłowa
Serwonapędy
44
MR-J2
MR-J2
S
S
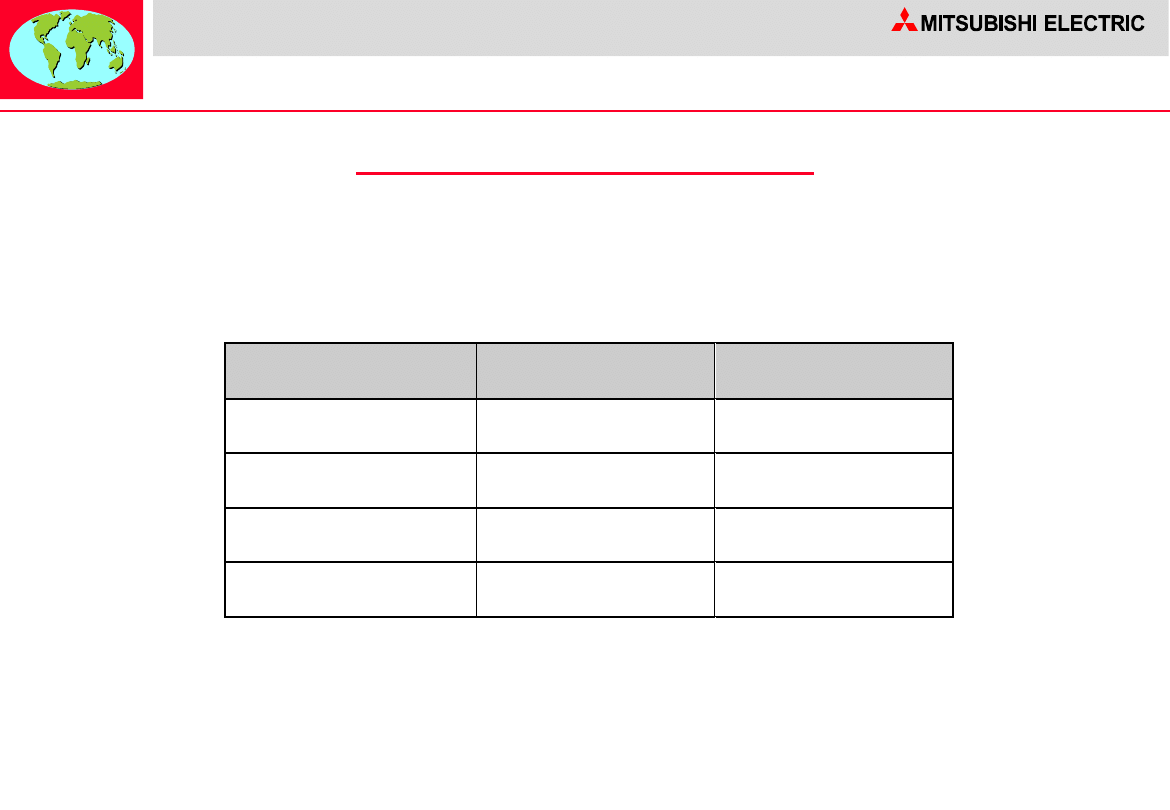
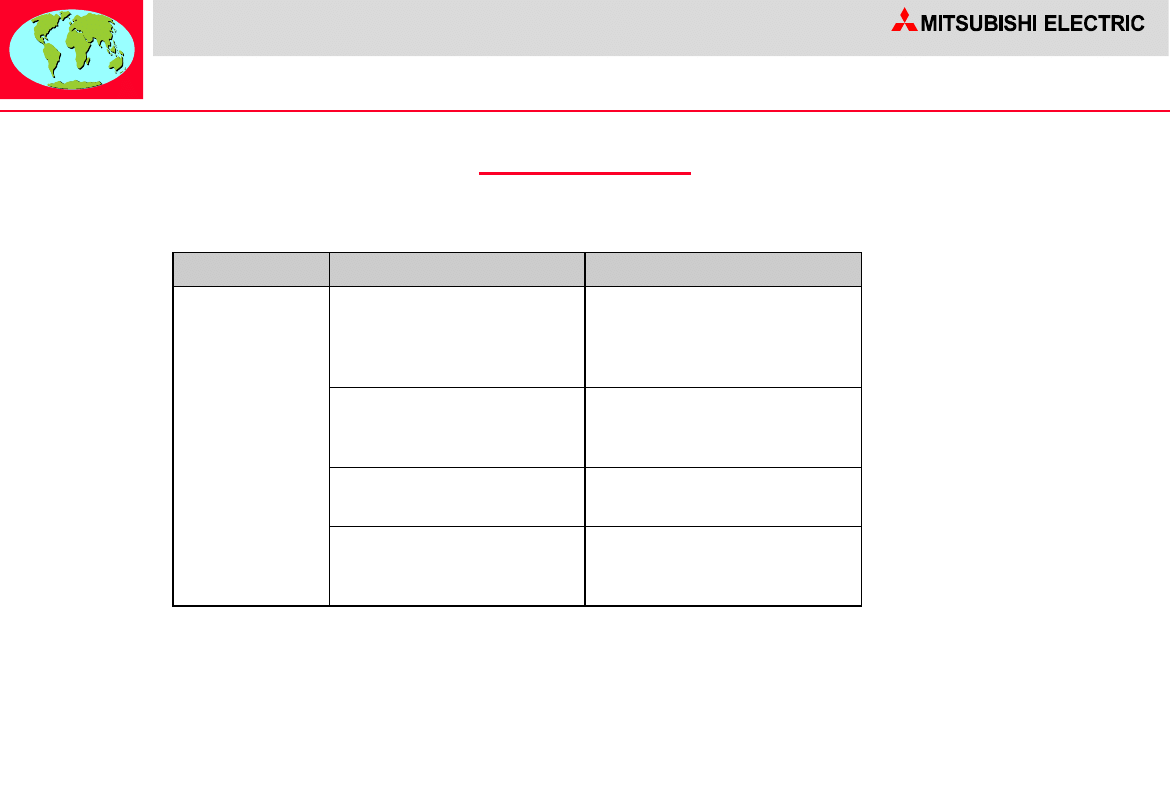
Kompletny układ napędowy zawiera:
Dobór wg
Typ
Uwagi
Silnik
- Momentu znamionowego i max.
HC-KFS..
0,16 do 2,4 Nm,
3000
obr/min
- Prędkości znamionowej i max. HC-MFS ..
0,16 do 2,4 Nm
,
3000 obr/min
- Wymaganej dynamiki
HC-SFS ..
2,39 do 33,4 Nm
,
2000 obr/min
- Stosunku momentów bezwładn.
HC-RFS ..
3,18 do 15,9 Nm
,
3000
obr/min
Wzmacniacz
- Typu silnika – patrz katalog
Filtr przeciw-
zakłóceniowy
1-fazowy do 750 W
MF-2F230-007.230
3-fazowy do 1 kW
MF-2F230-010.230
3-fazowy do 3.5 kW
MF-2F230-025.230
3-fazowy do 7.0 kW
MF-2F230-050.230
Wtyk złącza zadawania
Do wszystkich wzmacniaczy
MR- J2CN1
Zestaw – zawiera dwa
wtyki
Wtyk zasilania silnika
Typu silnika
MR-PWCNK1/K2 do HC-MFS, HC-KFS
MR-PWCNS1
do HC-SFS/HC-RFS do 1.5 kW
MR-PWCNS2
do HC-SFS/HC-RFS od 2 kW
MR-PWCNS3
do HC-SFS 7 kW
Wtyk zasilania luzownika
Typu silnika
MR-BKCN
do HC-SFS
Przewód enkodera
Typu silnika
MR-JCCBL__M- L/H do HC-MFS, HC-KFS
MR-JHSCBL__M-L/H do HC-SFS, HC-RFS
Automatyka przemysłowa
Serwonapędy
45
MR-J2
MR-J2
S
S
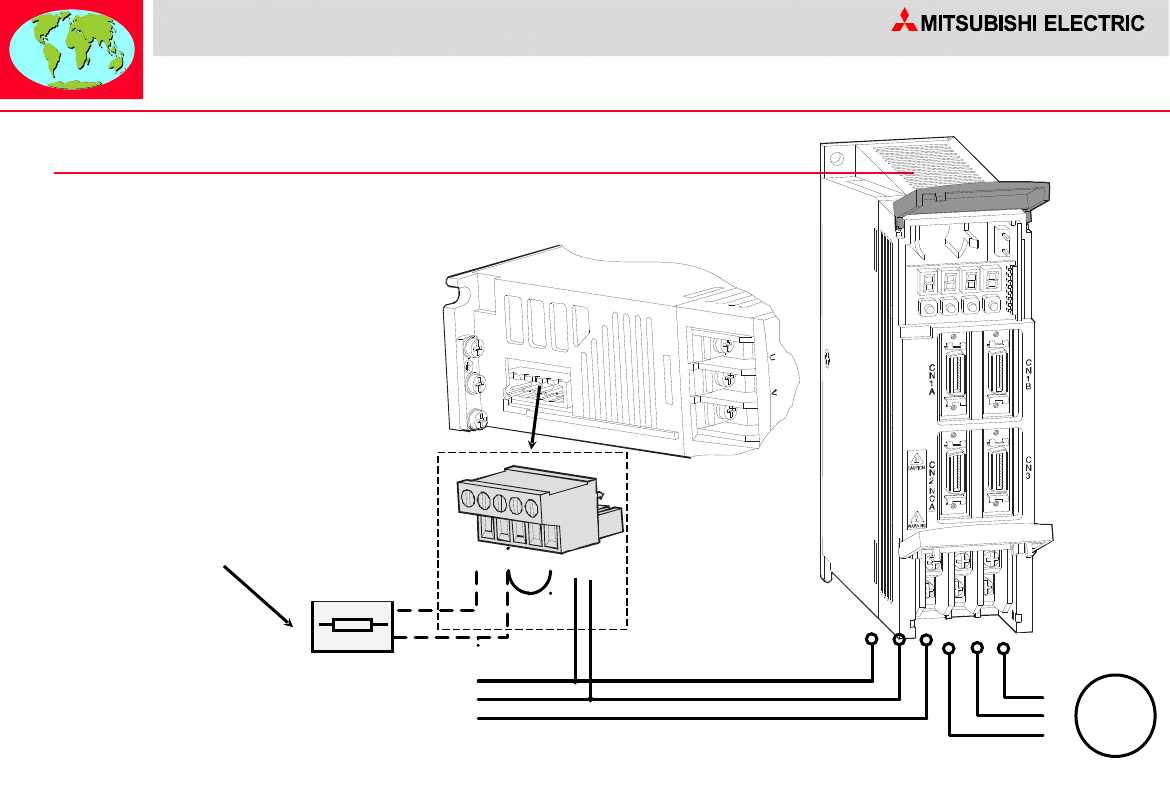
Zasilanie serwowzmacniaczy MR-J2S
L1(L1)
L2 (N)
L3
L11 L12
P
D
C
Uwaga:
Zasilanie 1x/3x
200 ... 230 V
!
Wzmacniacze MR-J2S-10A...70A 1 lub 3 fazy, od MR - J2S-100A wyłącznie 3 fazy !
Opcja1: zewnętrzny układ
hamujący
Opcja 2: zewnętrzny
rezystor
hamujący (usunąć zworę
z zacisków P-D)
U
V
W
M
3 ~
Automatyka przemysłowa
Serwonapędy
46
MR-J2
MR-J2
S
S
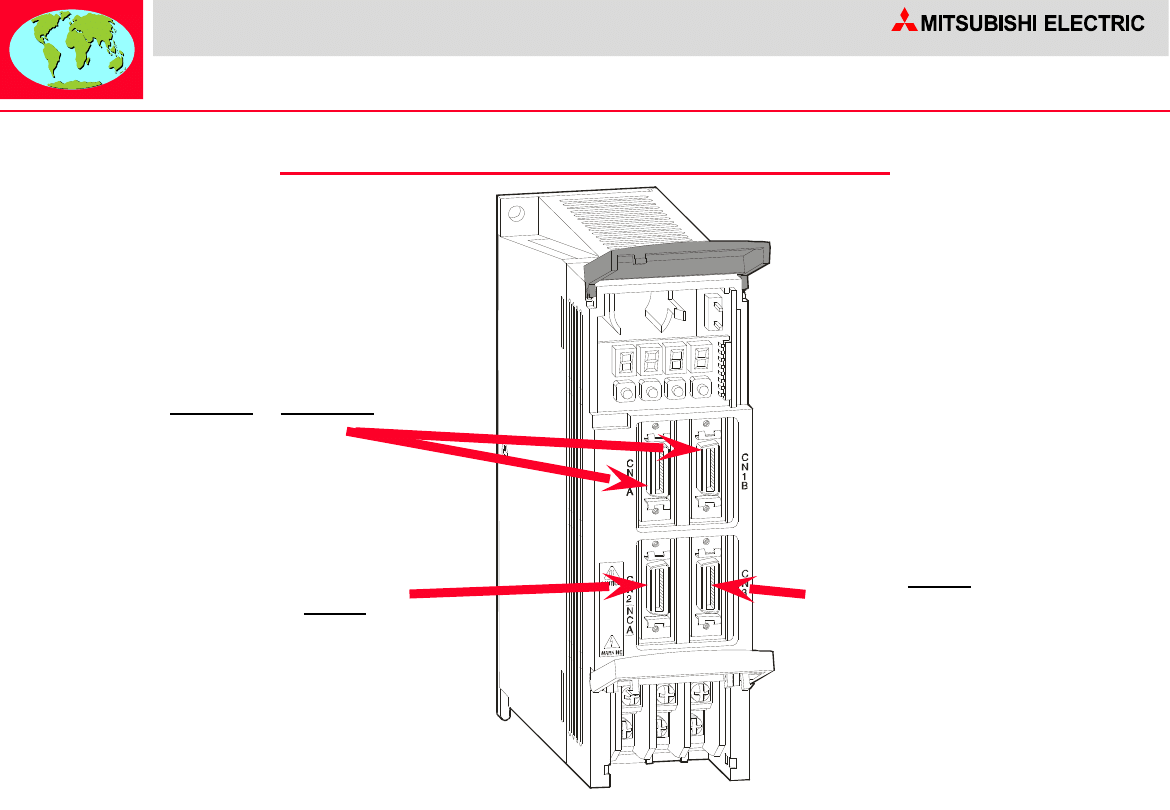
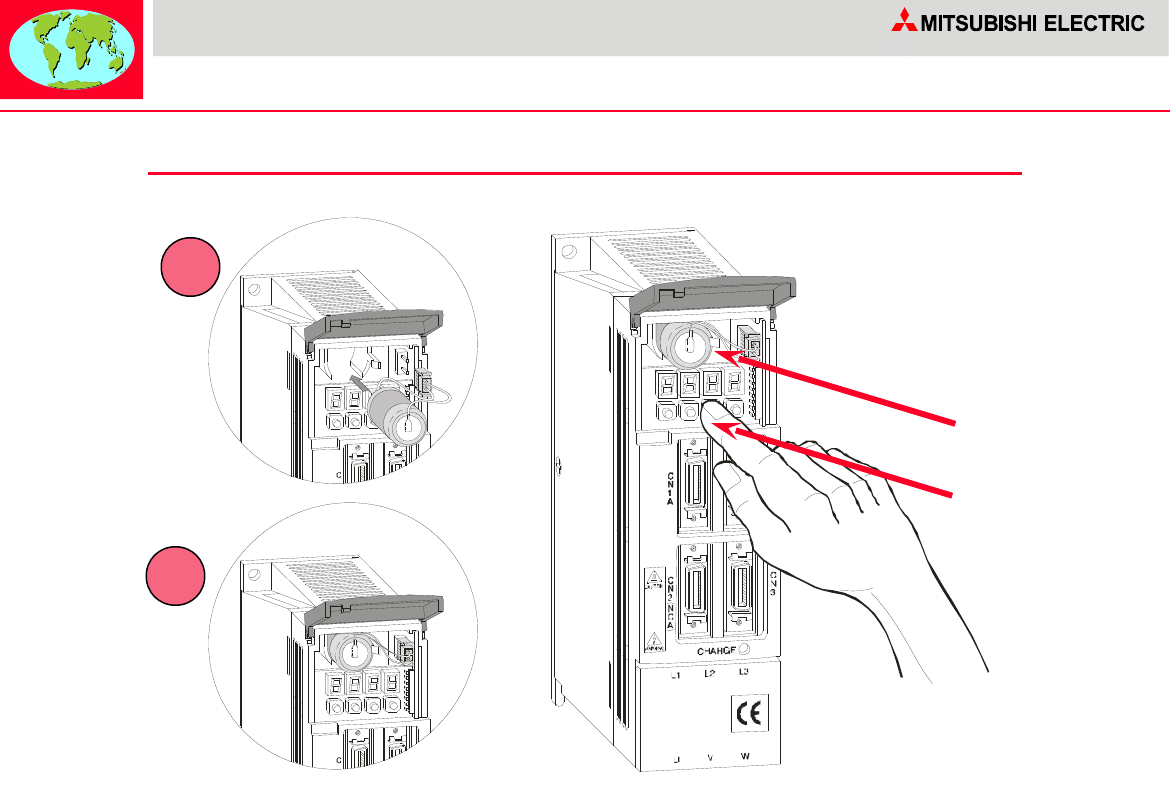
Złącza sterowania MR-J2S
Złącza CN1A i CN1B:
Wejścia i wyjścia
sterujące
Złącze CN2 :
Wejście enkodera
Złącze CN3 :
Łącze szeregowe
(RS232 / RS422)
Automatyka przemysłowa
Serwonapędy
47
MR-J2
MR-J2
S
S
MR-J2TBL05M
MR-J2TBL1M
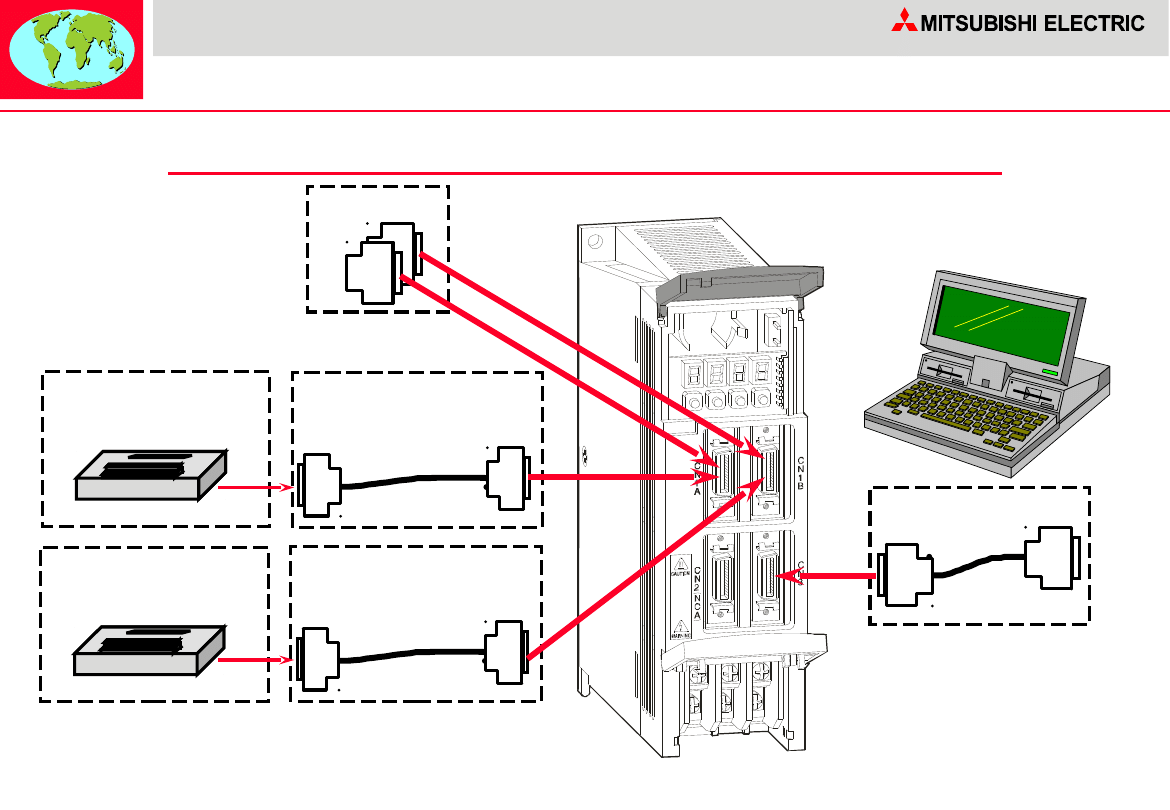
Elementy połączeniowe sterowania
MR-J2CN1
MR-CPCATBL3M
MR-TB20
Listwa zaciskowa
MR-J2TBL05M
MR-J2TBL1M
MR-TB20
Listwa zaciskowa
Złącza pośrednie
Zestaw wtyków
(do samodzielnego
montażu
przewodów)
Kabel połączeniowy
do PC (3m)
Automatyka przemysłowa
Serwonapędy
48
MR-J2
MR-J2
S
S
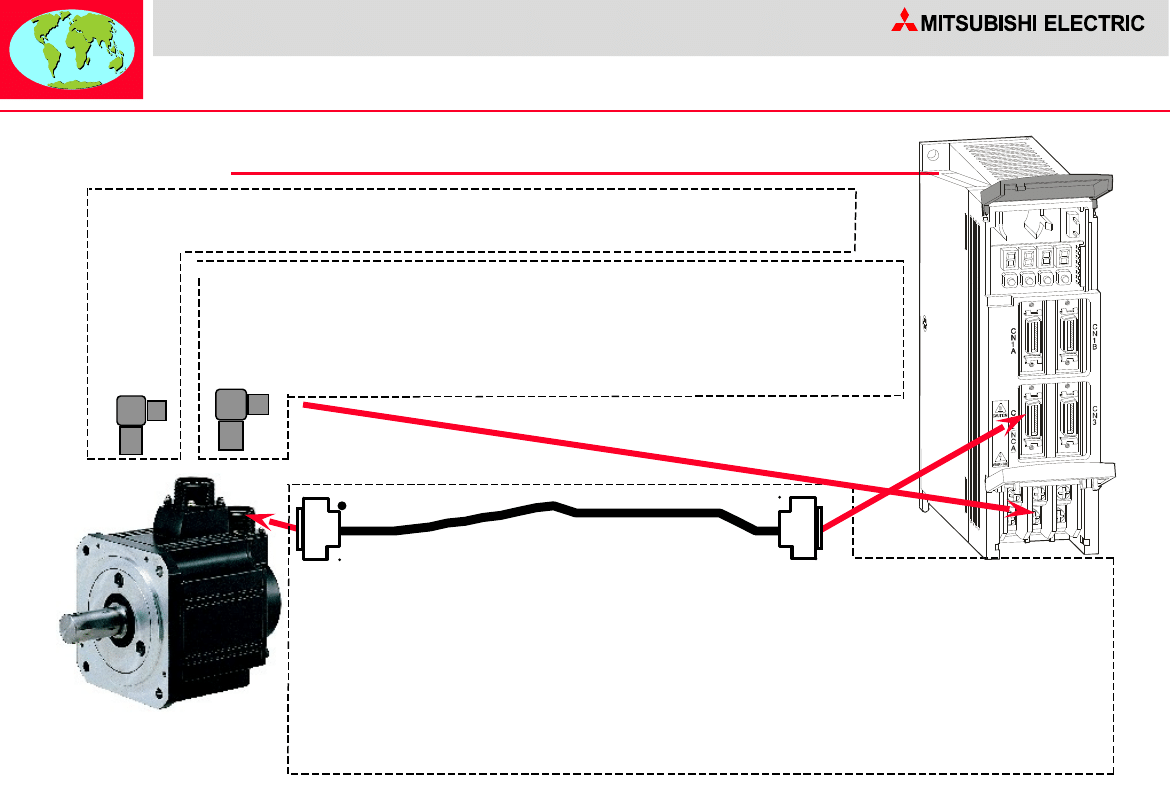
Podłączenie silnika do MR-J2S
MR-JCCBLxM-L Standardowy przewód enkodera do HC-KFS/MFS 2/5/10/20/30 m
MR-JCCBLxM-H Elastyczny przewód enkodera do HC-KFS/MFS 2/5/10/20/30 m
MR-JHSCBLxM-L Standardowy przewód enkodera do HC-SFS/RFS 2/5/10/20/30 m
MR-JHSCBLxM-H Elastyczny przewód enkodera do HC-SFS/RFS 2/5/10/20/30 m
MR-ENCBLxM-H Przewód enkodera IP65/IP67 do HC-SFS/RFS 2/5/10/20/30 m
MR-J2CNM
Zestaw wtyków enkodera do HC-KFS/MFS
MR-J2CNS
Zestaw wtyków enkodera do HC-SFS/RFS
MR-ENCNS
Zestaw wtyków enkodera IP65/IP67 do HC-SFS/RFS
MR-PWKCNK1 Złącze zasilania do HC-KFS/MFS
MR-PWCNS1
Wtyk zasilania do HC-
SFS052...152/RFS103...203
MR-PWCNS2
Wtyk zasilania do HC-
SFS202...502/RFS353...503
MR-PWCNS3
Wtyk zasilania do HC-SFS702
MR-PWKCNK2 Złącze zasilania i hamulca do HC-KFS/MFS z hamulcem
MR-BKCN Wtyk hamulca do HC-SFS202B...702B
Automatyka przemysłowa
Serwonapędy
49
MR-J2
MR-J2
S
S
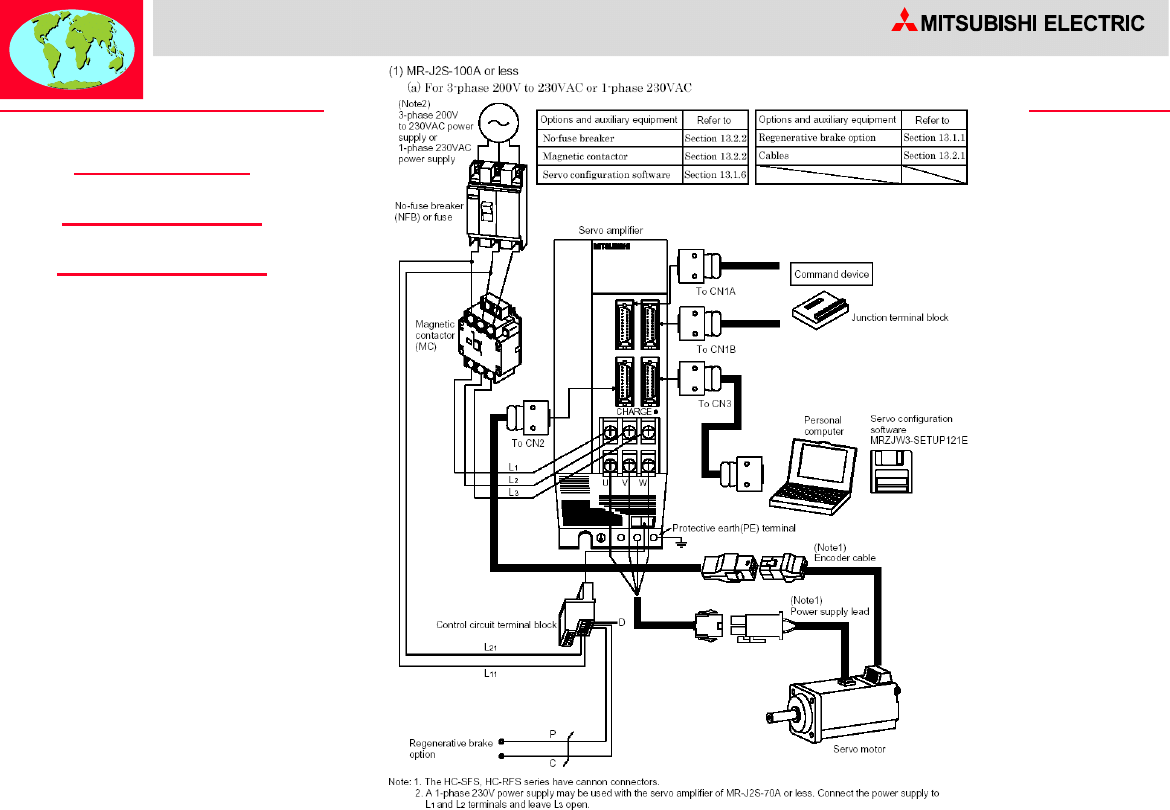
Typowy
schemat
połączeń
Automatyka przemysłowa
Serwonapędy
50
MR-J2
MR-J2
S
S
Urządzenia opcjonalne MR-J2S
Bateria podtrzymująca
MR-BAT lub A6BAT
Filtry przeciwzakłóceniowe (EMC)
1-fazowy do 750 W
MF-2F230-
007.230
3-fazowy do 1 kW MF-2F230-010.230
3-fazowy do 3.5 kW
MF-2F230-
025.230
3-fazowy do 7.0 kW
MF-2F230-
050.230
Symbol
Moc
ED
MT 01364023
1.3 kVA 60%
1.7 kVA 30%
MT 01764023
1.7 kVA 60%
2.5 kVA 30%
MT 02564023
2.5 kVA 60%
3.5 kVA 30%
MT 03564023
3.5 kVA 60%
5.5 kVA 30%
MT 05564023
5.5 kVA 60%
MT 7.5-60
7,5 kVA 60%
MT 11-60
11 kVA
60%
Autotransformatory 3x400/3x230V
Rezystor
hamujący
Moc hamo-
wania (W)
Oporność
(Ohm)
MR-RB032
30
40
MR-RB12
100
40
MR-RB32
300
40
MR-RB30
300
13
MR-RB50
500
13
Zewnętrzne rezystory hamujące
Automatyka przemysłowa
Serwonapędy
MR-J2
MR-J2
S
S
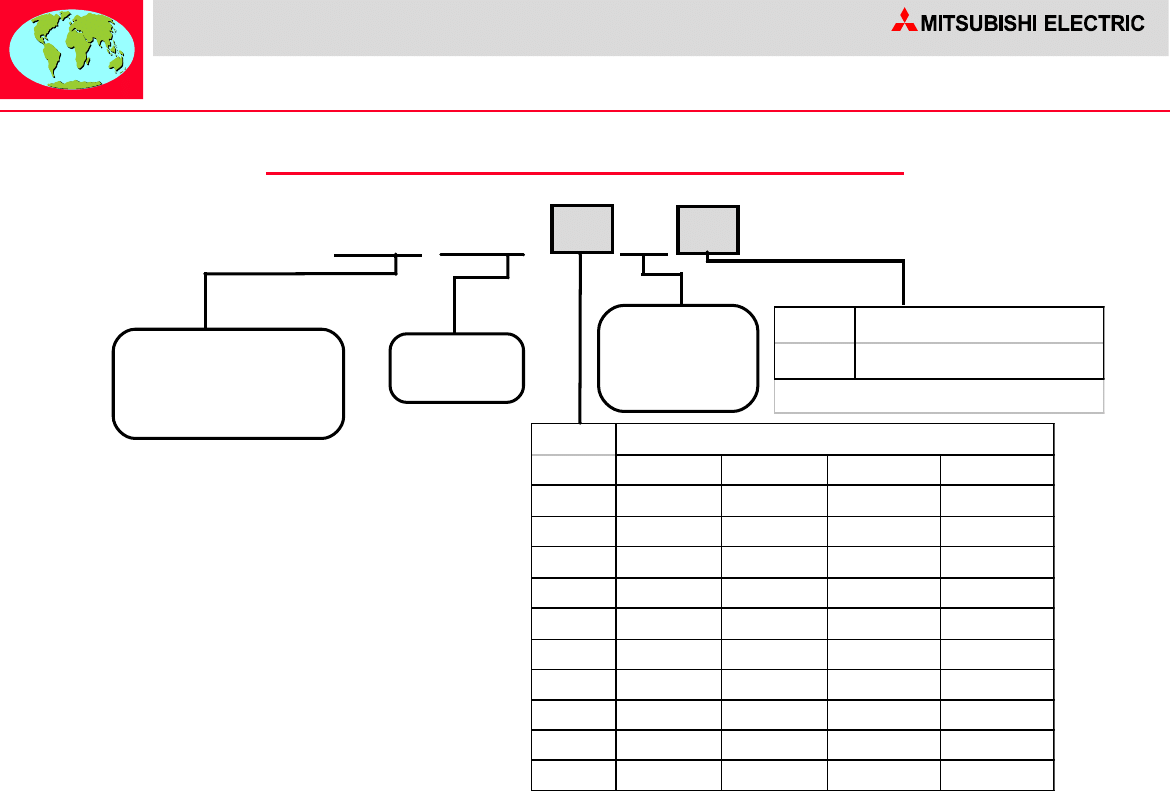
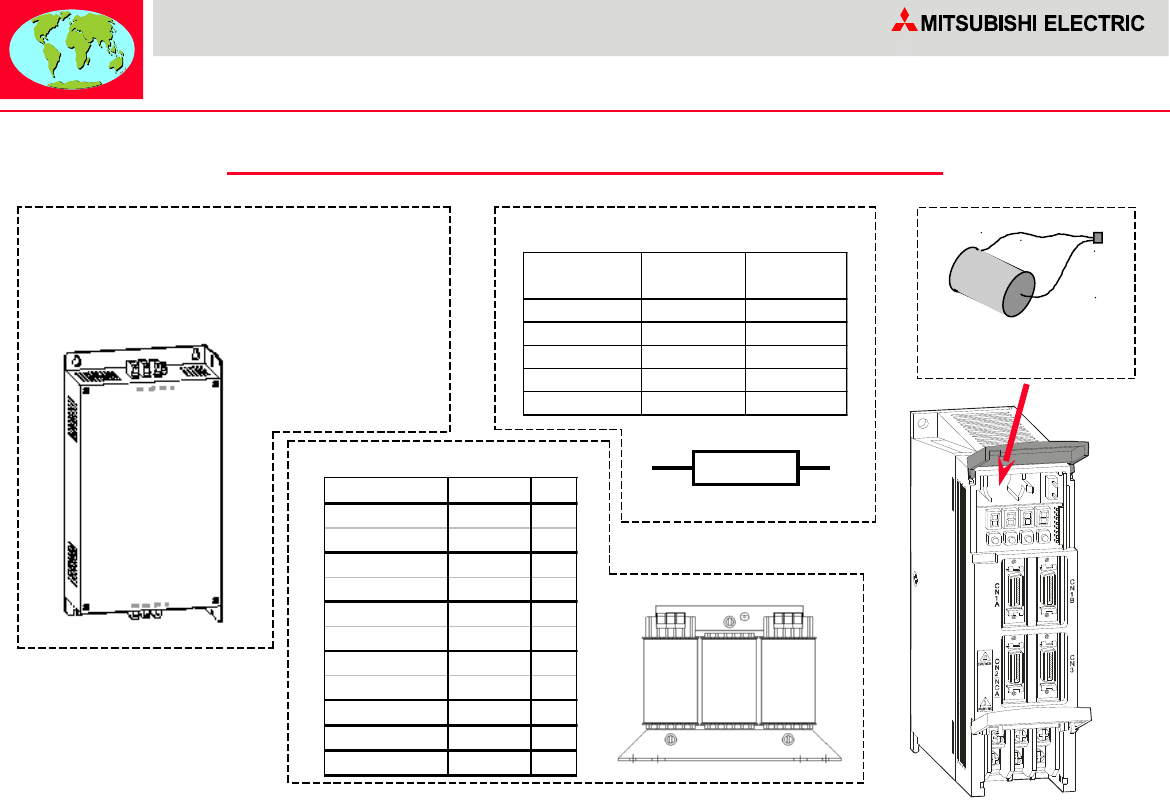
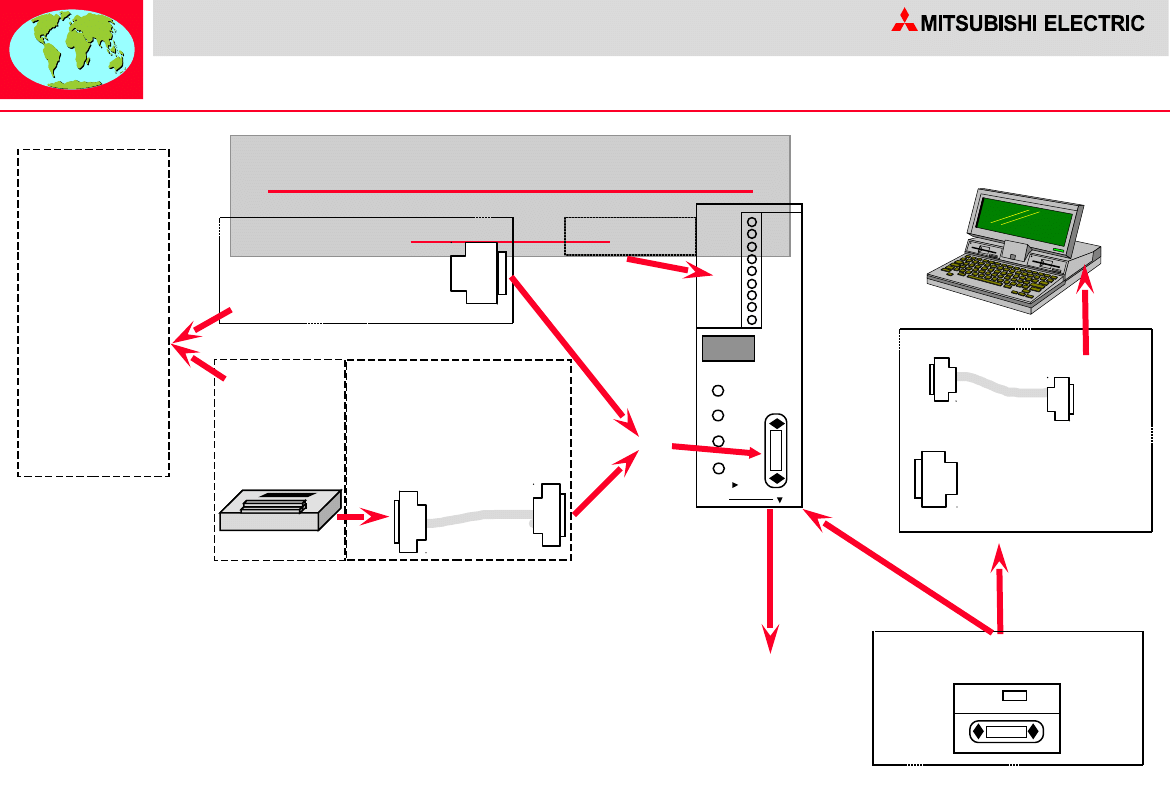
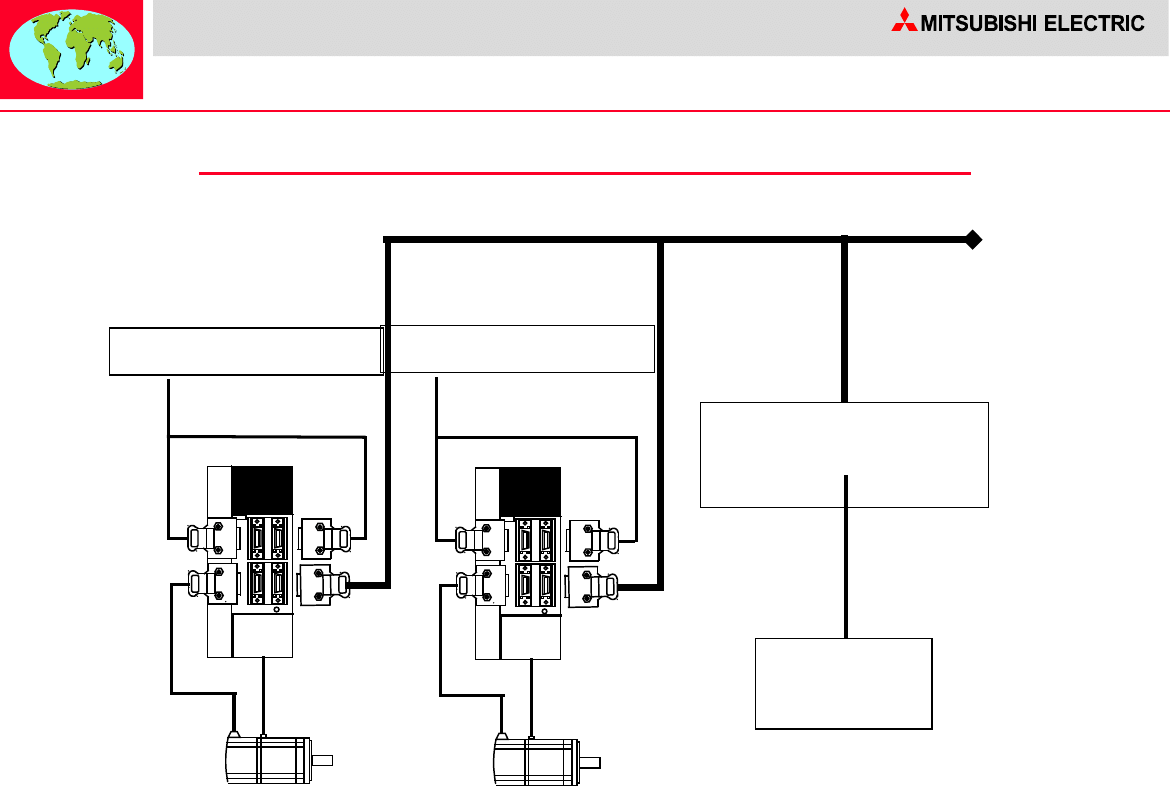
Niezbędne elementy
systemu
CN1A
CN1B
CN3
CN2
(ENC)
MITSUBISHI
MELSERVO
MELSERVO
MR-J2-100A
L1 L2 L3
U V W
MR-CPCATBL3M
MR-J2HBUS*M-A
- 0,5m, 1m lub 5 metrów
Kabel (magistrala) pomiędzy sterownikiem
oraz CN1A pierwszego napędu.
MR-CPCATBL3M jest podłączony do
portu RS 232 (COM) komputera z
oprogramowaniem
Servo setup software
MR-J2CN1 + kabel
wykonany
przez użytkownika
lub
Sterownik ruchu
A171/2/3SHCPU
MR-J2S-B
Kabel enkodera oraz zasilanie - takie same, jak w MR-J2S-A
MR-J2HBUS*M
- 0,5m, 1m lub 5 metrów
Kabel (magistrala) pomiędzy CN1B danego
wzmacniacza oraz CN1A następnego.
Do następnego napędu
lub opornika
końcowego
(terminatora)
MR--A-TM
Automatyka przemysłowa
Serwonapędy
MR-J2
MR-J2
S
S
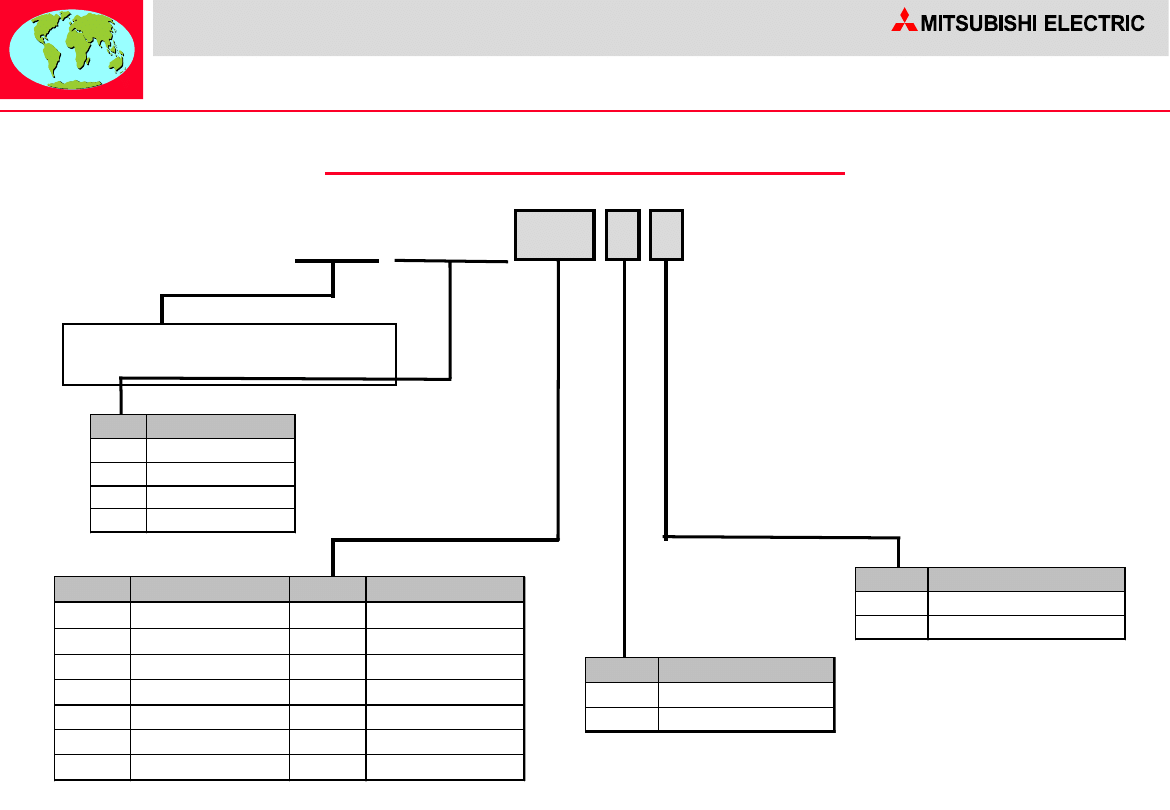
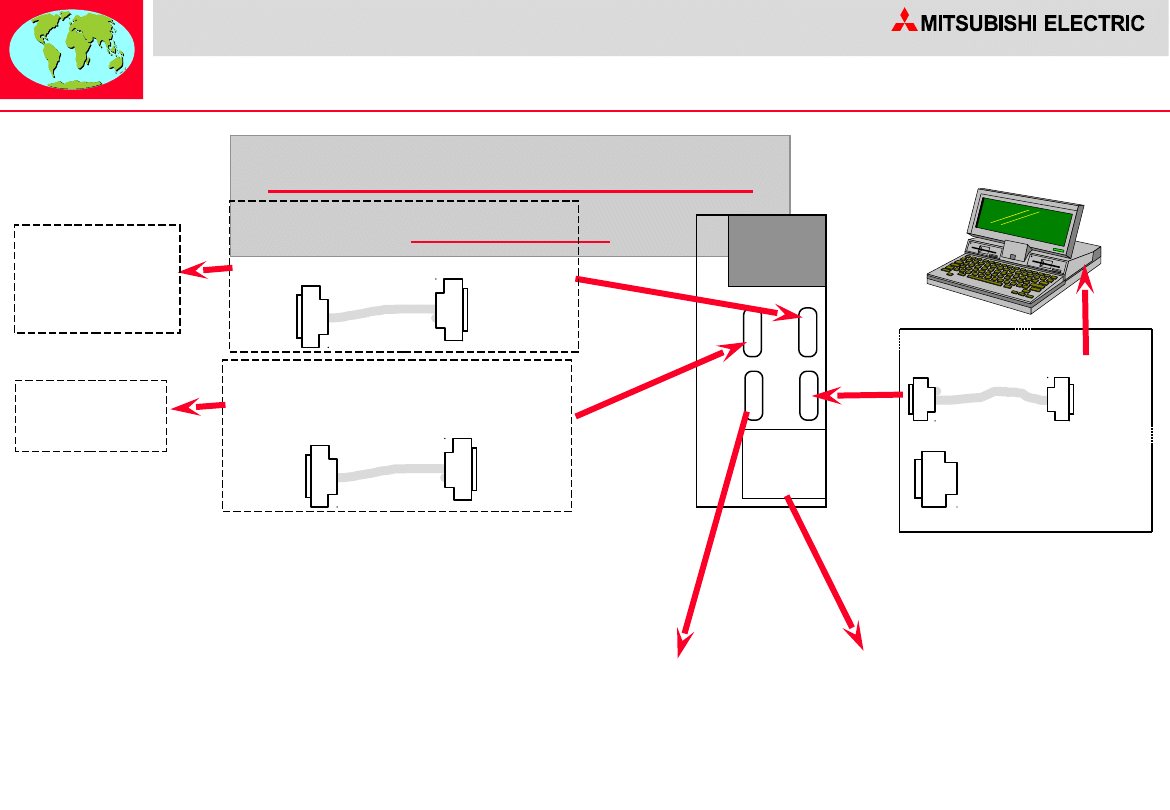
Niezbędne elementy
systemu
MR-J2CN1
CN1A
CN1B
CN3
CN2
(ENC)
MITSUBISHI
MELSERVO
MELSERVO
MR-J2-100A
L1 L2 L3
U V W
MR-CPCATBL3M
MR-TB20
Listwa
zaciskowa
MR-J2TBL05M – dł. 0,5 m
MR-J2TBL1M – dł. 1,0 m
Uniwersalny wtyk do
wszystkich gniazd. Dla
użytkowników produkujących
własne kable
CN1A
lub
CN1B
Złącze pośrednie
do podłączenia MR-TB20 - 1:1
pasujące do wszystkich gniazd.
MR-CPCATBL3M jest podłączony do
portu RS 232 (COM) komputera z
oprogramowaniem
Serwo setup software
MR-J2CN1 + kabel
wykonany
przez użytkownika
lub
Tylko regulacja
położenia
(pozycjonowan
ie)
lub
Tryb Pracy
MR-J2S-CL
Kabel enkodera oraz zasilanie - takie same, jak w MR-J2S-A/B
Automatyka przemysłowa
Serwonapędy
53
MR-J2
MR-J2
S
S
System pozycjonowania absolutnego
Bateria
Ustawienie
parametrów
1
2
Automatyka przemysłowa
Serwonapędy
MR-J2
MR-J2
S
S
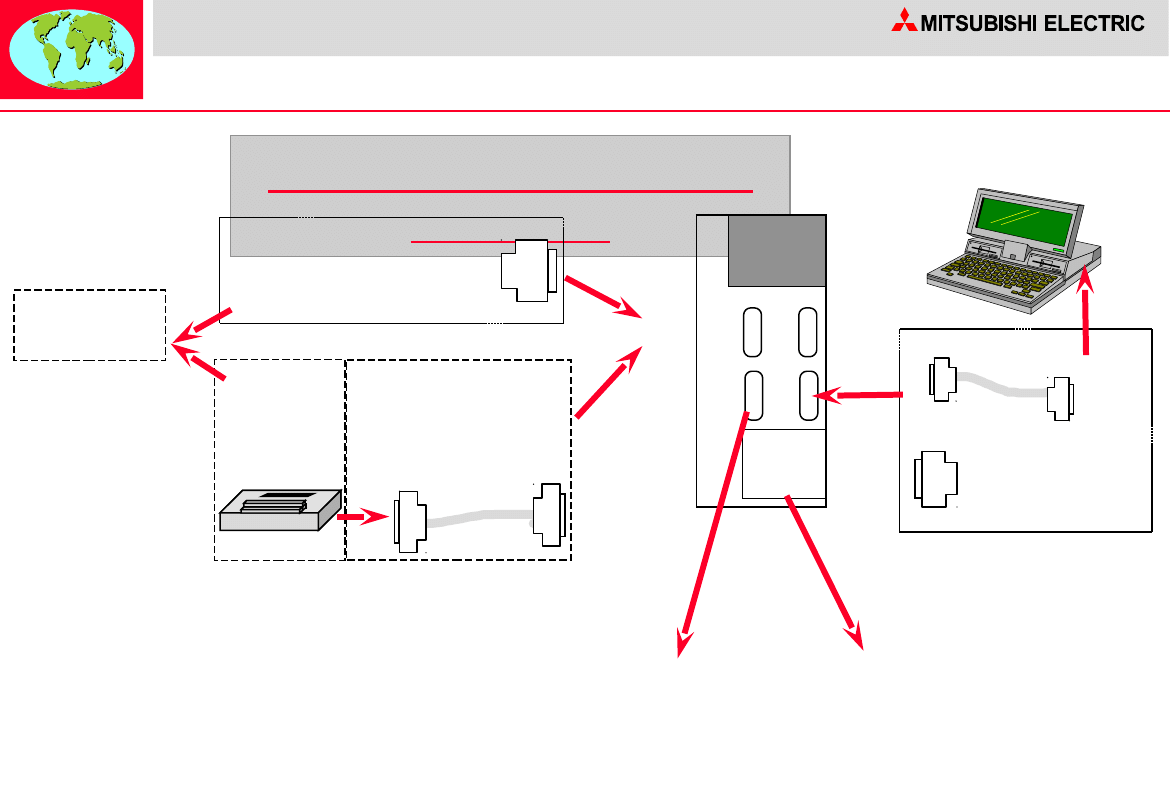
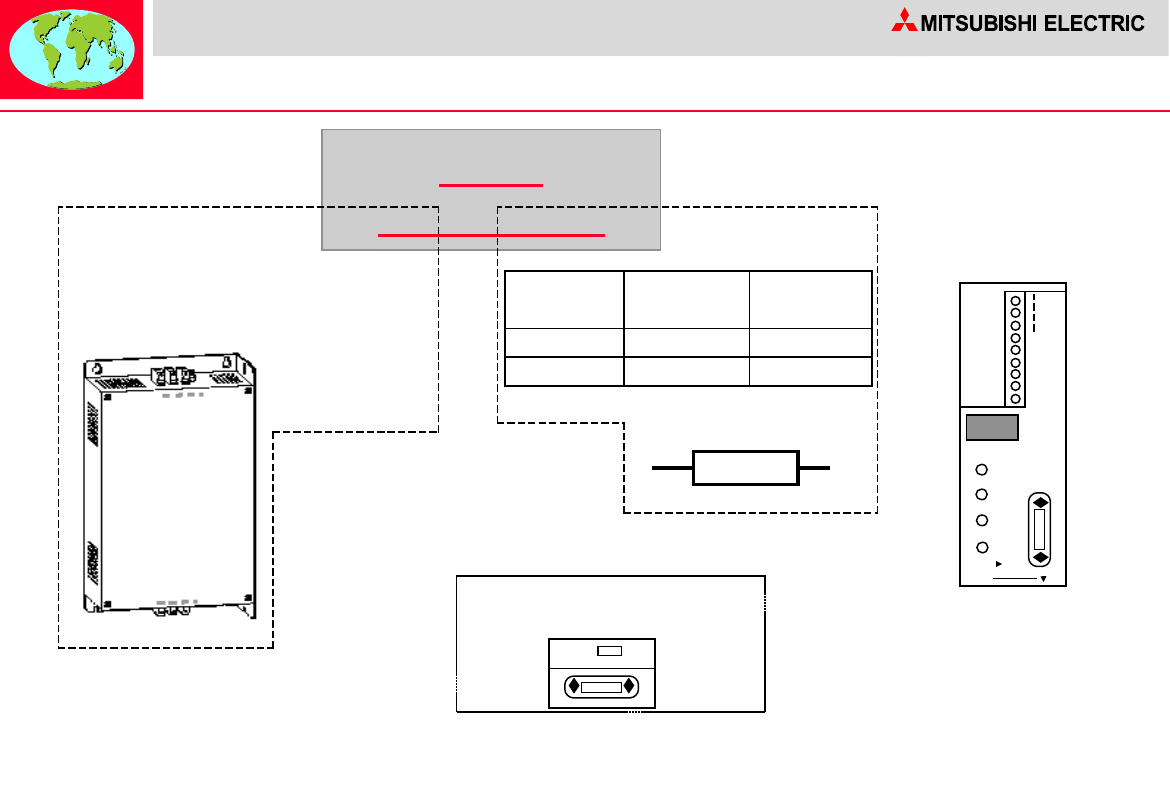
Niezbędne elementy
systemu
MR-J2CN1
L1
L2
L3
U
V
W
MR-CPCATBL3M
MR-TB20
Listwa
zaciskowa
MR-J2TBL05M – dł. 0,5 m
MR-J2TBL1M – dł. 1,0 m
Uniwersalny wtyk do
wszystkich gniazd. Dla
użytkowników
produkujących własne kable
CN1
Złącze pośrednie
do podłączenia MR-TB20 - 1:1
pasujące do wszystkich gniazd.
MR-CPCATBL3M jest podłączone do
portu RS232 komputera z oprogramowaniem
narzędziowym (Serwo setup software)
MR-J2CN1 + kabel
wykonany
przez użytkownika
lub
Sterownik ruchu
- FX2N-1PG/10PG
- FX2N-10/20GM
- AD71
- AD75P1/2/3
- A1SD71
- A1SD75P1/2/3
- inny sterownik
generujący
impulsy o
następujących
cechach:
wyjścia impulsowe -
typu otwarty kolektor
tranzystor-24V
10mA do 200 kpps
lub
Tryb Pracy
Do przetwornika
(następny slajd)
MR-C
MODE
UP
DOWN
SET
CN 2
MR-C20A-UE
CN 1
.
Do zasilania silnika
(następny slajd)
.
Opcja - MR-C-T01 - Port RS 232
Automatyka przemysłowa
Serwonapędy
MR-J2
MR-J2
S
S
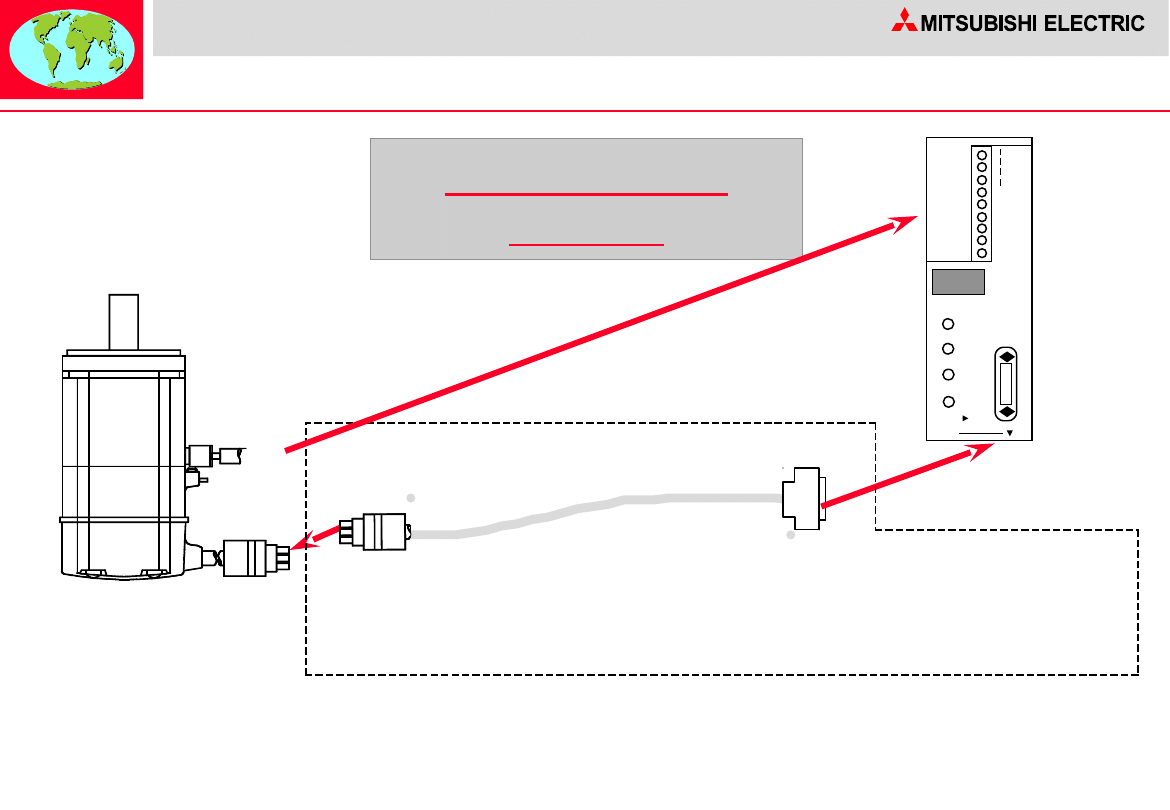
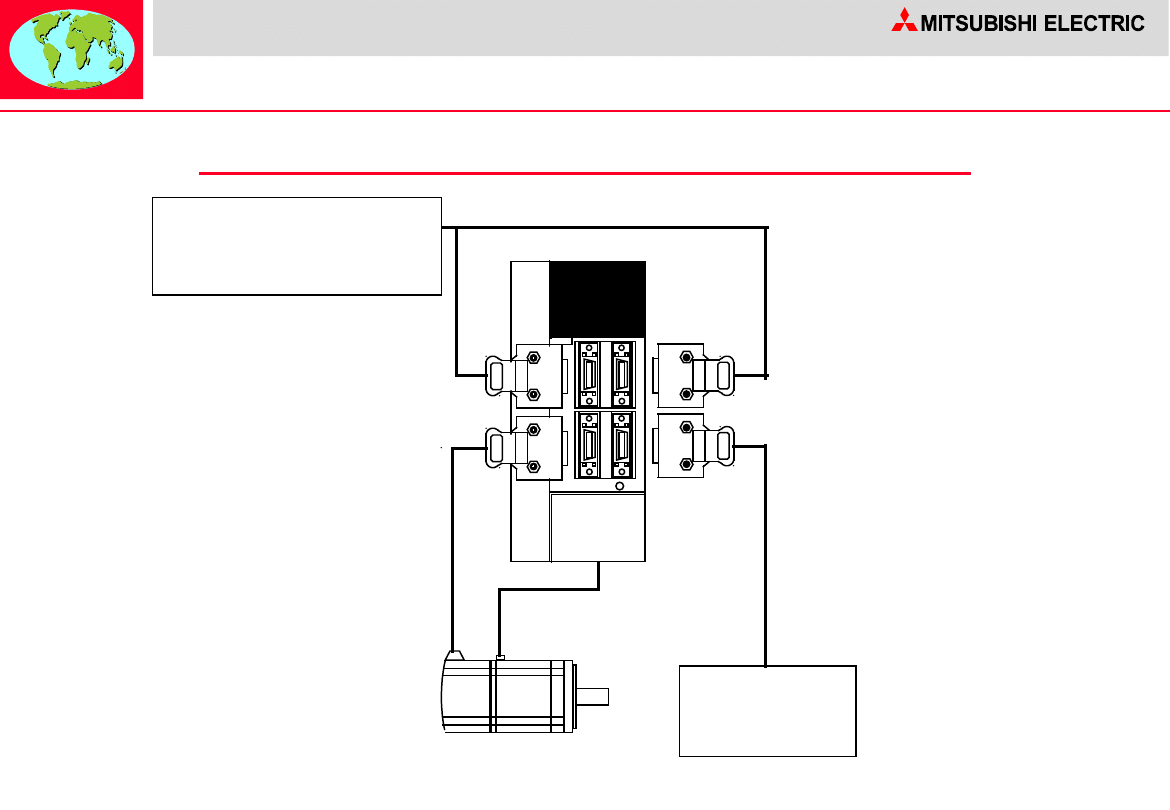
Podłączenie
silnika
MR-JCCBL*M-L Kabel enkodera do HC-PQ - 2, 5, 10, 20 i 30 m -
standardowe długości
MR-JCCBL*M-H Kabel enkodera do HC-PQ - 2, 5, 10, 20 i 30 m - bardzo
elastyczny
MR-C
CN1
MR-C20A-UE
L1
L2
L3
U
V
W
MODE
UP
DOWN
SET
CN 2
CN 1
.
Automatyka przemysłowa
Serwonapędy
MR-J2
MR-J2
S
S
Inne
akcesoria
Filtr przeciwzakłóceniowy
EMC
FMR-J2-6A-EF1
Opornik
hamujący
Moc (W)
Oporność
(Ohm)
MR-RB013
10
52
MR-RB033
30
52
Dodatkowe oporniki hamujące
MR-C
MR-C20A-UE
L1
L2
L3
U
V
W
MODE
UP
DOWN
SET
CN 2
CN 1
.
.
Opcje - MR-C-T02 - Port RS 422
dla tworzenia sieci 1:n
Automatyka przemysłowa
Serwonapędy
57
MR-J2
MR-J2
S
S
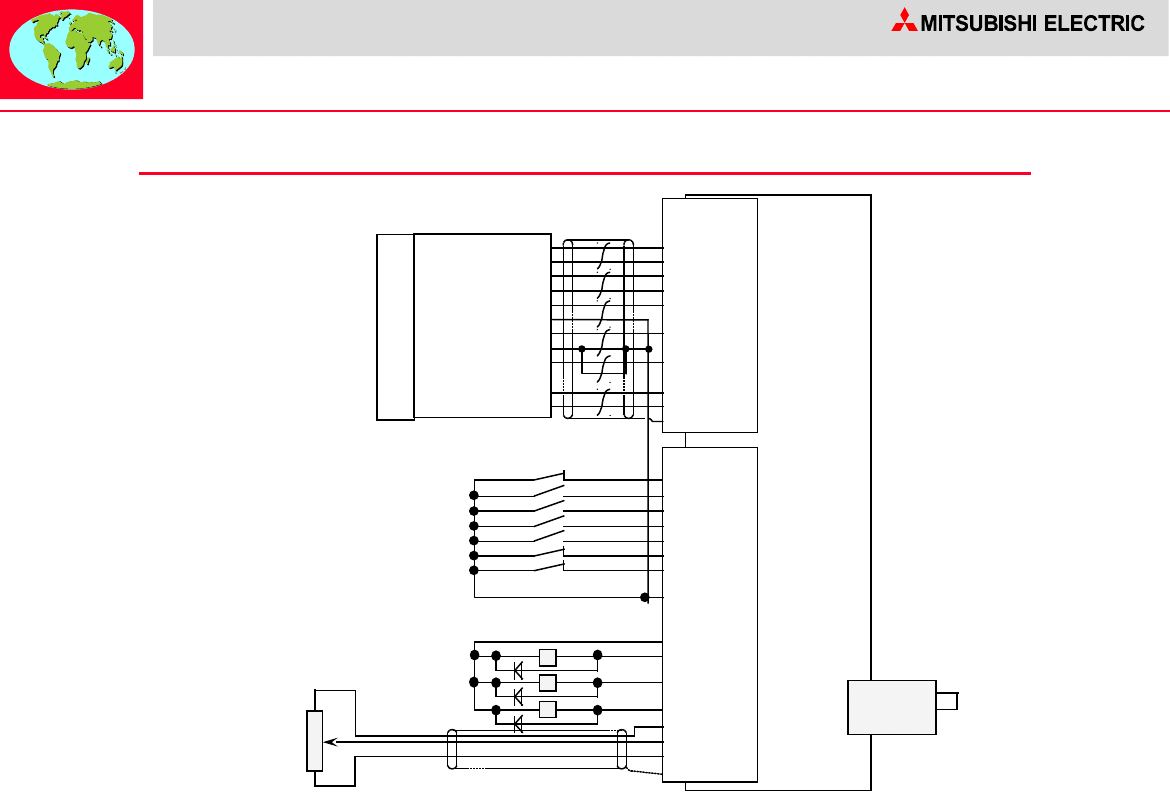
Podłączenie z PLC (logika pozytywna)
CN1A
OPC 11
PP
3
PG
13
NP
2
NG
12
CR
8
RD
19
COM 9
INP 18
LZ
5
LZR 15
SG
Pulse F+
3
Pulse F-
21
Pulse R+
4
Pulse R-
22
Clear 5
Clear Com
23
Ready
7
Com 26
INPS 8
PGO(+5V)
24
PGO COM
25
A
D
7
5
/
A
1
S
D
7
5
CN1B
EMG 15
SON 5
RES 14
PC
8
TL
9
LSP 16
LSN 17
VDD 3
VDD 3
ALM 18
ZSP 19
TLG 6
P15R 11
TLA
LG
SG
R3
R2
R1
13
COM
10
SG
External emergency stop
Servo on
Reset
Proportion control
Torque limit
Forward rotation stroke end
Reverse rotation stroke end
positive potential
Alarm
Zero speed
Limiting torque
Analog torque limit
Automatyka przemysłowa
Serwonapędy
58
MR-J2
MR-J2
S
S
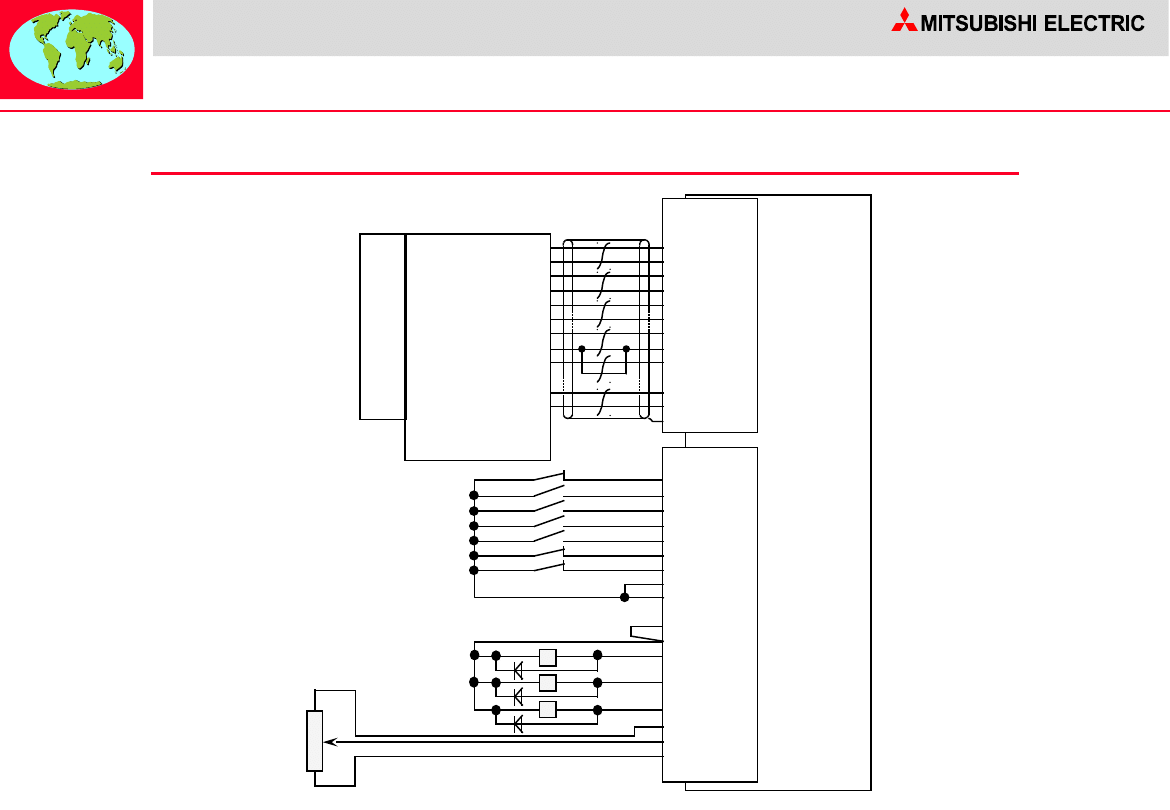
Połączenie z PLC (logika negatywna)
CN1A
OPC 11
PP
3
PG
13
NP
2
NG
12
CR
8
SG
10
RD
19
COM 9
INP 18
LZ
5
LZR 15
SG
Pulse F+
3
Pulse F-
21
Pulse R+
4
Pulse R-
22
Clear
5
Clear Com
23
Ready
7
Com
26
INPS
8
PGO (+5V)
24
PGO COM
25
A
D
7
5
/
A
1
S
D
7
5
CN1B
EMG 15
SON 5
RES 14
PC
8
TL
9
LSP 16
LSN 17
SG
10
SG
20
VDD 3
COM 13
ALM 18
ZSP 19
TLG 6
P15R 11
TLA
LG
SG
R3
R2
R1
External emergency stop
Servo on
Reset
Proportion control
Torque limit
Forward rotation stroke end
Reverse rotation stroke end
negative potential
positive potential
Common
Alarm
Zero speed
Limiting torque
Analog torque limit
Automatyka przemysłowa
Serwonapędy
59
MR-J2
MR-J2
S
S
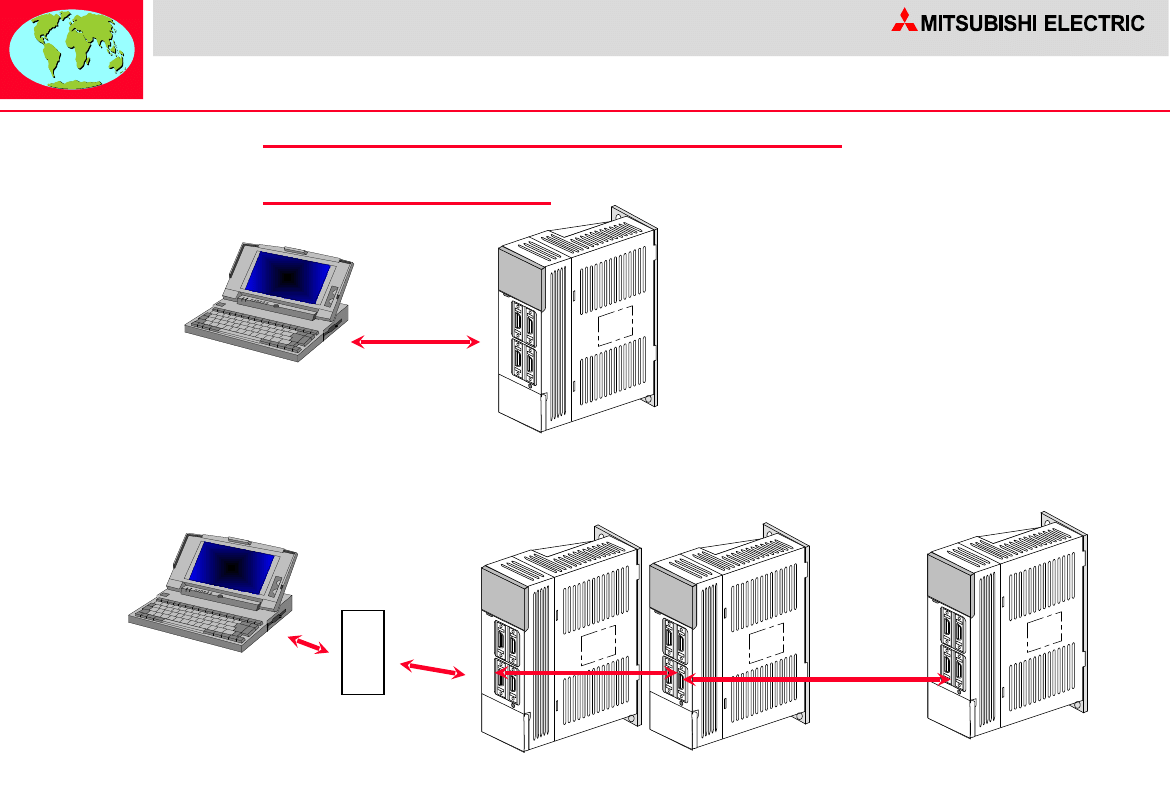
Uniwersalny interfejs
szeregowy
RS-232
RS-422 (max. 32 urządzenia)
Konwerter
RS232C/RS422
Automatyka przemysłowa
Serwonapędy
60
MR-J2
MR-J2
S
S
Komunikacja szeregowa (RS232)
PC
RS-
232C
Sygnały
we/wy
Automatyka przemysłowa
Serwonapędy
61
MR-J2
MR-J2
S
S
Komunikacja szeregowa (RS485)
Dalsze osie
RS-485 (do 31 osi)
Konwerter
RS-485 / RS-
232C
PC
Sygnały we/wy Sygnały we/wy
Automatyka przemysłowa
Serwonapędy
62
MR-J2
MR-J2
S
S
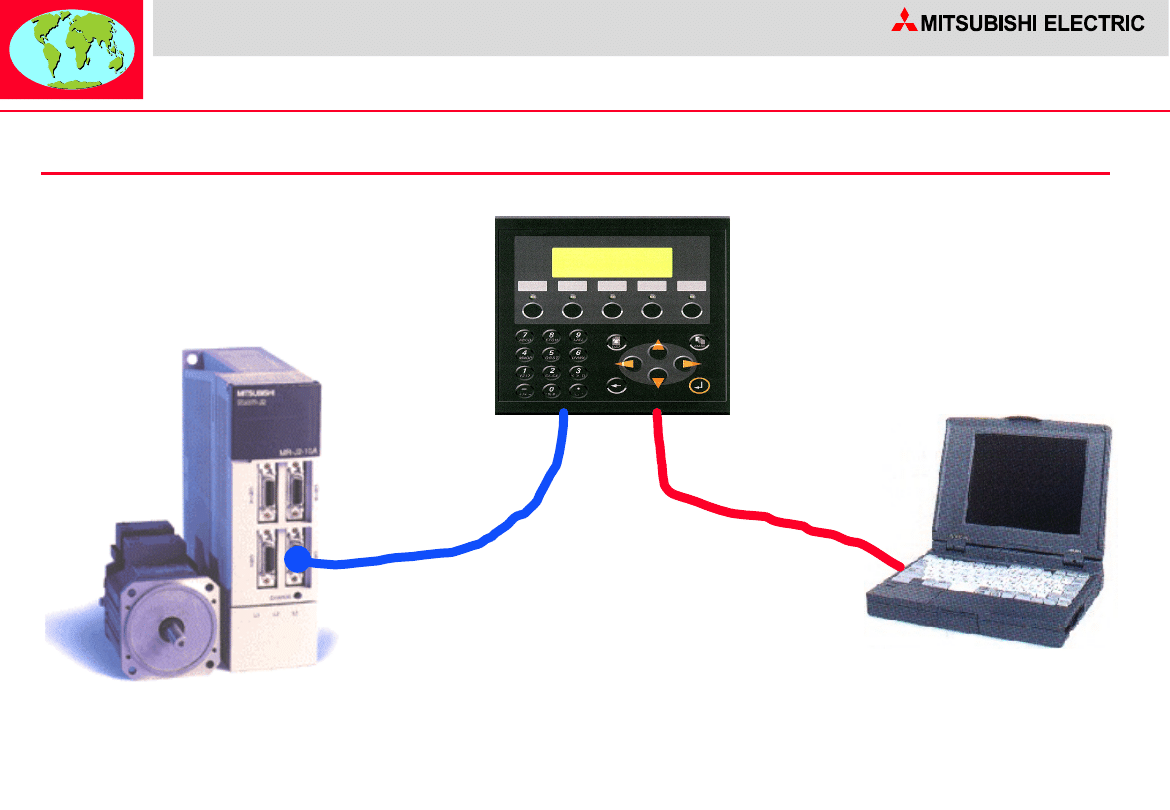
Połączenie panelu MAC z serwonapędem MR-
J2S
RS-232
RS422
Używając trybu transparentnego panelu MAC, można
jednocześnie podłączyć komputer PC z oprogramowaniem
narzędziowym w celu programowania, monitorowania i
diagnostyki MR-J2S
MAC-PC-CAB-R2
Przewód RS422 (skrętka)
Automatyka przemysłowa
Serwonapędy
63
MR-J2
MR-J2
S
S
Parametry
Parametry
Automatyka przemysłowa
Serwonapędy
64
MR-J2
MR-J2
S
S
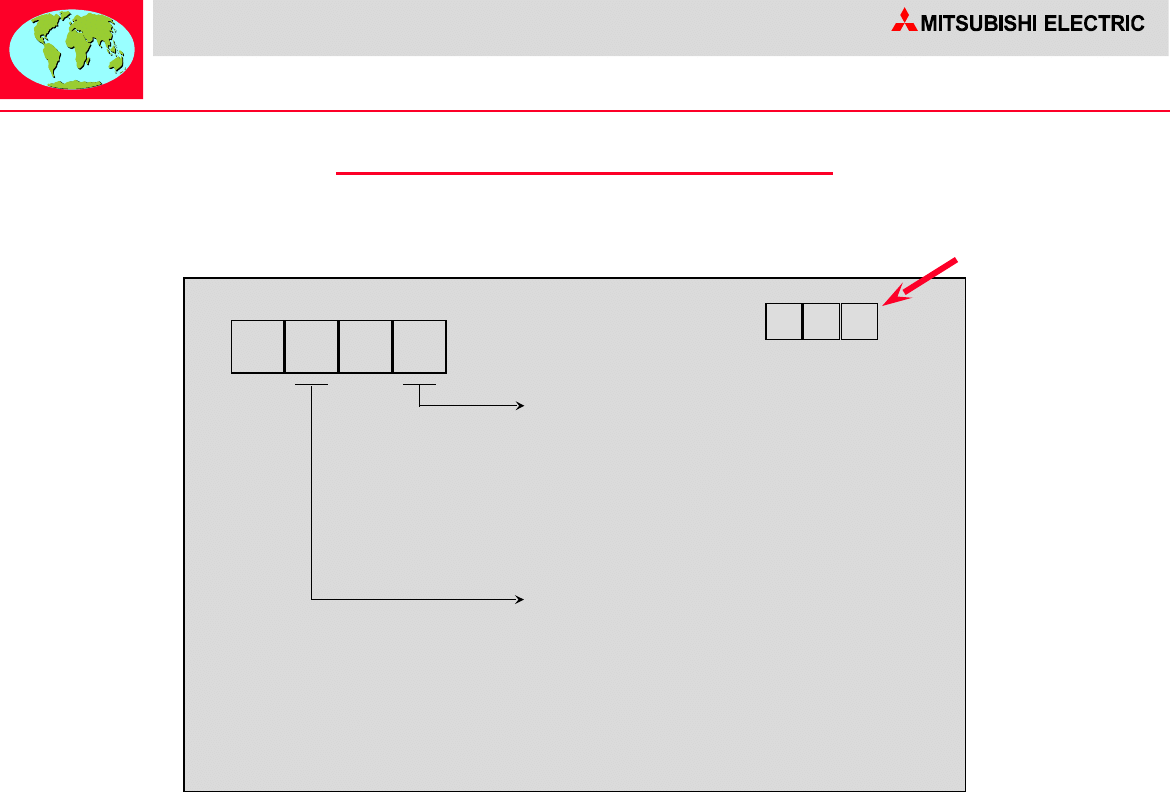
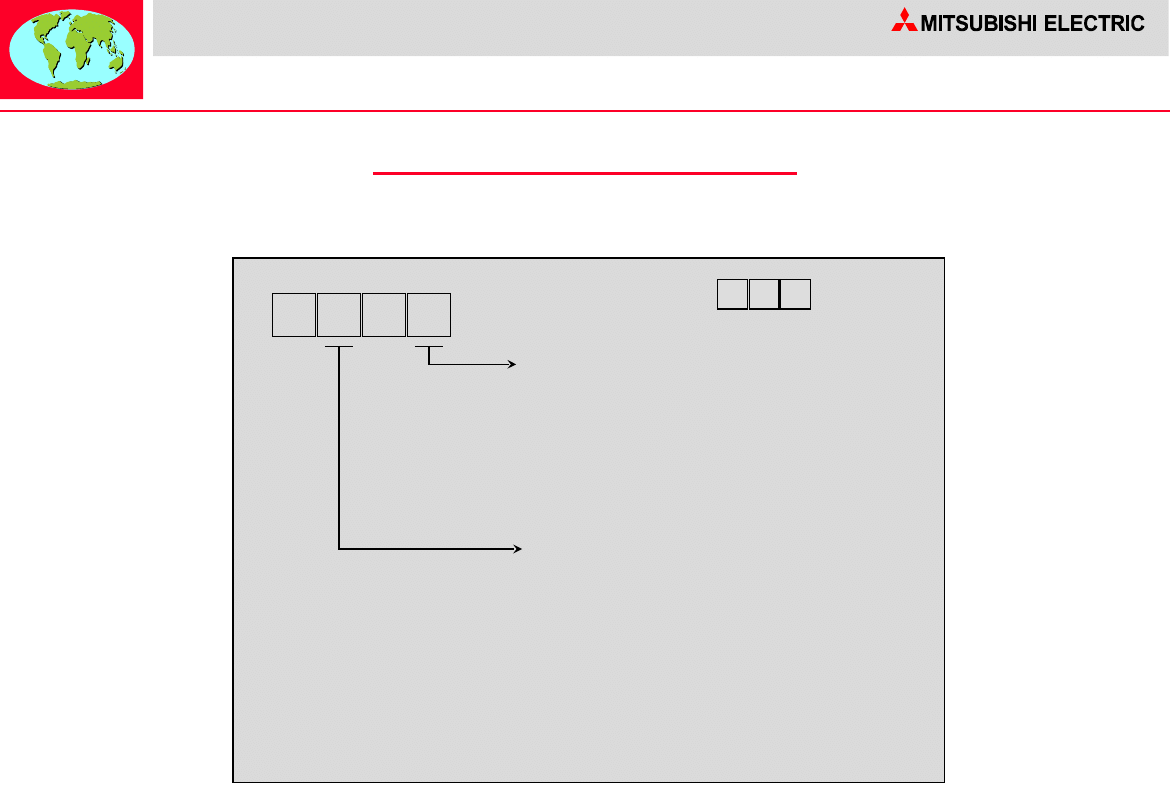
Parametr 0 „STY” (*)
Tryb regulacji
Wybór opcji hamowania regeneracyjnego
0
0
0
0
Ustawienie
fabryczne
P S
T
Wybór trybu regulacji
0: Pozycji
1: Pozycji i prędkości
2: Prędkości
3: Prędkości i momentu
4: Momentu
5: Momentu i pozycji
Wybór typu zewętrznego
opornika hamującego
0: brak
4: MR-RB32
1: rezerwa (nie ustawiać)
5: MR-RB30
2: MR-RB032
6: MR-RB50
3: MR-RB12
Ważne dla trybów
regulacji:
Uwaga: zmiana wartości parametrów, oznaczonych w nagłówku
gwiazdką (*) wymaga wyłączenia i ponownego załączenia
serwowzmacniacza
Automatyka przemysłowa
Serwonapędy
65
MR-J2
MR-J2
S
S
Parametr 1 “OP1” (*)
Wybór funkcji 1
0
0
0
0
Ustawienie
fabryczne
P S
T
Filtr sygnałów
wejściowych
0: brak
1: 1,777 ms
2: 3,555 ms
3: 5,333 ms
System pozycjonowania
0: Inkrementalny
1: Absolutny
Przeznaczenie styku 19 CN1B
0: Sygnał wykrycia prędkości
zerowej
1: Sygnał blokady hamulca
elektromagn.
Automatyka przemysłowa
Serwonapędy
66
MR-J2
MR-J2
S
S
Parametr 2 „ATU”
Parametry wyjściowe autotuningu
0
1
0
5
Ustawienie
fabryczne
P S
Szybkość reakcji systemu
1...5: niska (np. częstotliwość
rezonansowa do 40Hz)
6...A: średnia (np. częstotliwość rezonansowa
40...100Hz)
B...F: wysoka (np. częstotliwość rezonansowa
100...300Hz)
Wybór autotuningu
0: Tryb interpolacji – wg parametru 6
(tylko dla trybu regulacji prędkości)
1: Tryb autotuningu 1 (domyślny)
2: Tryb autotuningu 2
3, 4: Tryb dostrajania ręcznego
Automatyka przemysłowa
Serwonapędy
67
MR-J2
MR-J2
S
S
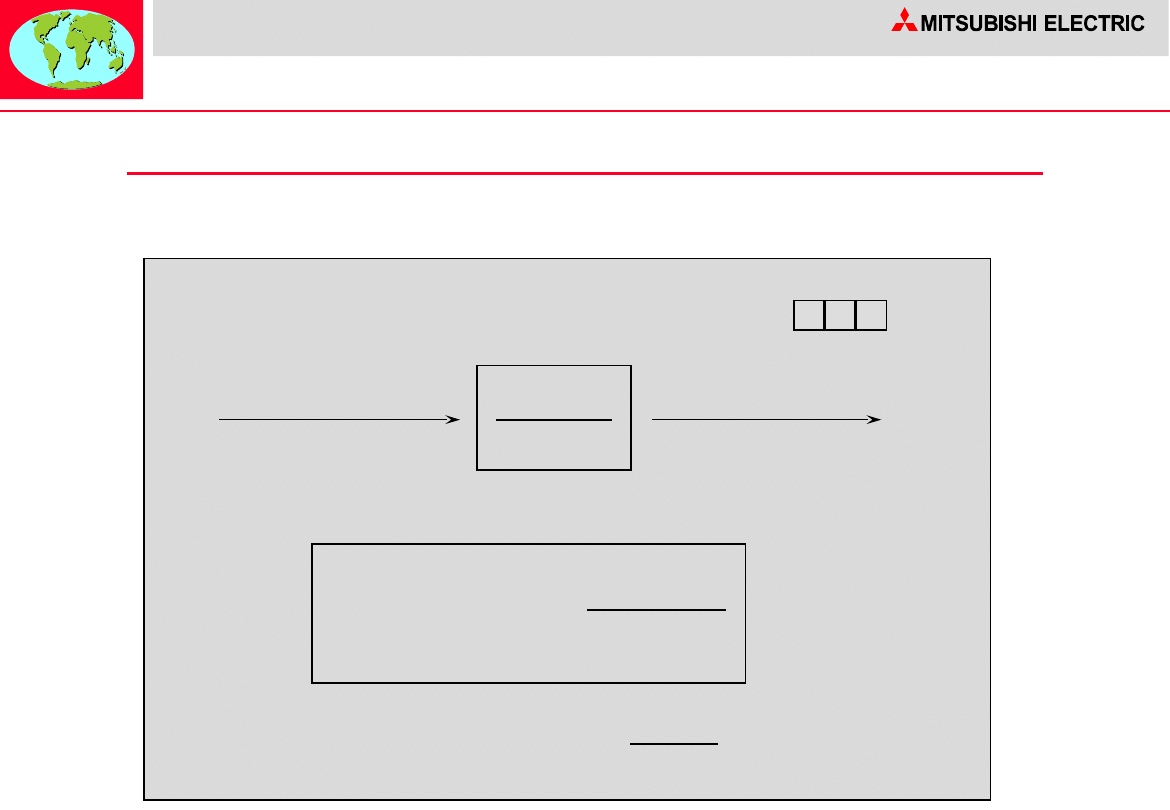
Parametr 3 “CMX” - Parametr 4 “CDV”
Przekładnia elektroniczna (Licznik i mianownik
współczynnika)
CMX
CDV
Wejściowy
ciąg impulsów
Pozycja zadana
f 1
f 2
CMX
CDV
f 2 = f 1 x
Uwaga: Ustawiać w zakresie 1/50 < <
500
CMX
CDV
P
CMX, CDV = 1 ...
131072
Automatyka przemysłowa
Serwonapędy
68
MR-J2
MR-J2
S
S
Parametr 5 “INP”
Szerokość strefy “Pozycjonowanie wykonane”
Określa szerokość (w impulsach przed
przekładnią elektroniczną) strefy, w której
wydawany jest sygnał „Pozycjonowanie
wykonane”.
0
1
0
0
Ustawienie
fabryczne
(0 ~ 10000
impulsów)
P
Automatyka przemysłowa
Serwonapędy
69
MR-J2
MR-J2
S
S
Parametr 6 “PG1”
Wzmocnienie pętli pozycjonowania 1
Podwyższyć wzmocnienie, aby poprawić
dokładność pozycjonowania
Zbyt duża wartość powoduje niestabilność
systemu
Jeżeli wykonywany jest autotuning,
automatycznie wpisywany jest jego wynik
0 0
3
5
Ustawienie
fabryczne
(4 - 2000
rad/s)
P
Automatyka przemysłowa
Serwonapędy
70
MR-J2
MR-J2
S
S
Parametr 7 “PST”
Stała czasowa rozpędzania/hamowania w trybie pozycjonowania
Przykład: umożliwia płynną synchronizację pracy linii.
0 0 0
3
Ustawienie
fabryczne
(0 ~ 20000
ms)
P
Sta
rt
Serwowzmacni
acz
Serwosiln
ik
Czujnik
synchroniza
cji
Automatyka przemysłowa
Serwonapędy
71
MR-J2
MR-J2
S
S
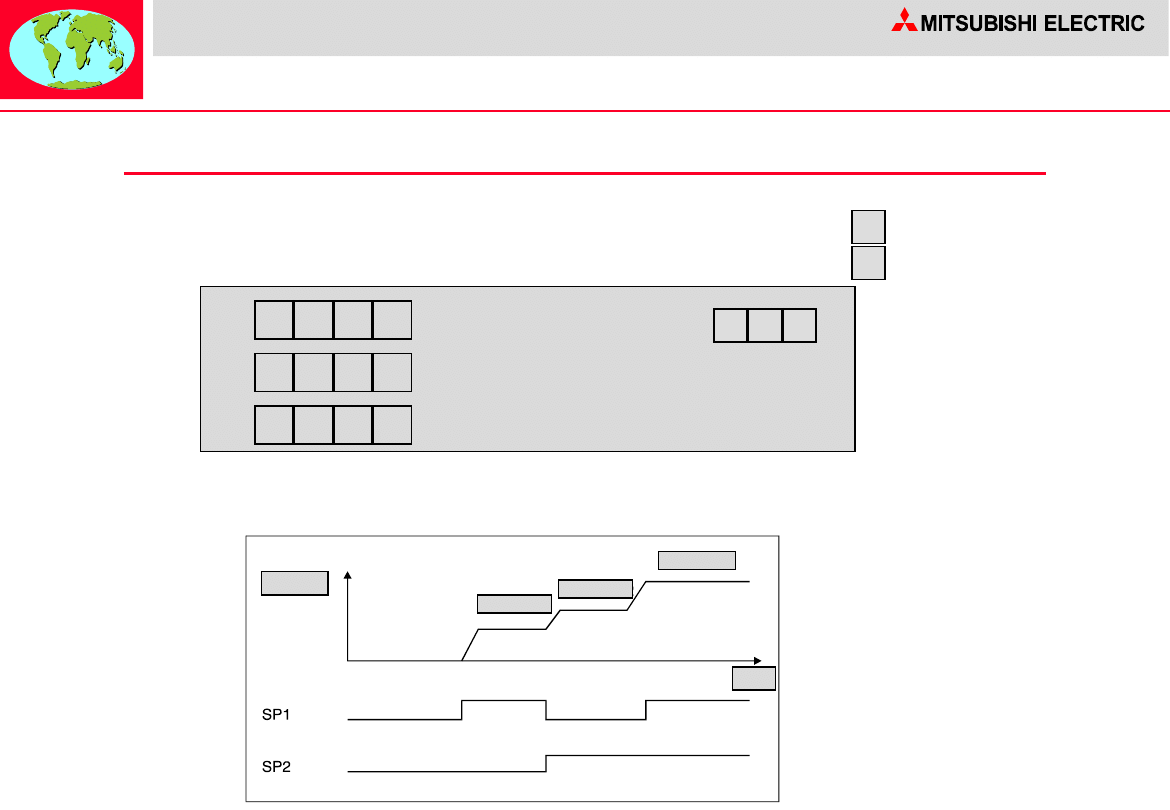
Par.8 ”SC1”, Par.9 ”SC2”, Par.10 ”SC3”
prędkość
czas
Prędk. 1
Prędk.
2
Prędk. 3
Prędkość zaprogramowana1, 2, 3
[obr/min]
Ograniczenie prędkości 1, 2, 3
[obr/min]
Służą do określenia prędkości zaprogramowanych w trybie
regulacji prędkości lub ograniczeń prędkości w trybie
regulacji momentu.
0
1 0
0
Ustawienie fabryczne
(0 ~ prędkość max.
obr/min)
S
T
0
5 0
0
1 0 0
0
1
2
3
S
T
Automatyka przemysłowa
Serwonapędy
72
MR-J2
MR-J2
S
S
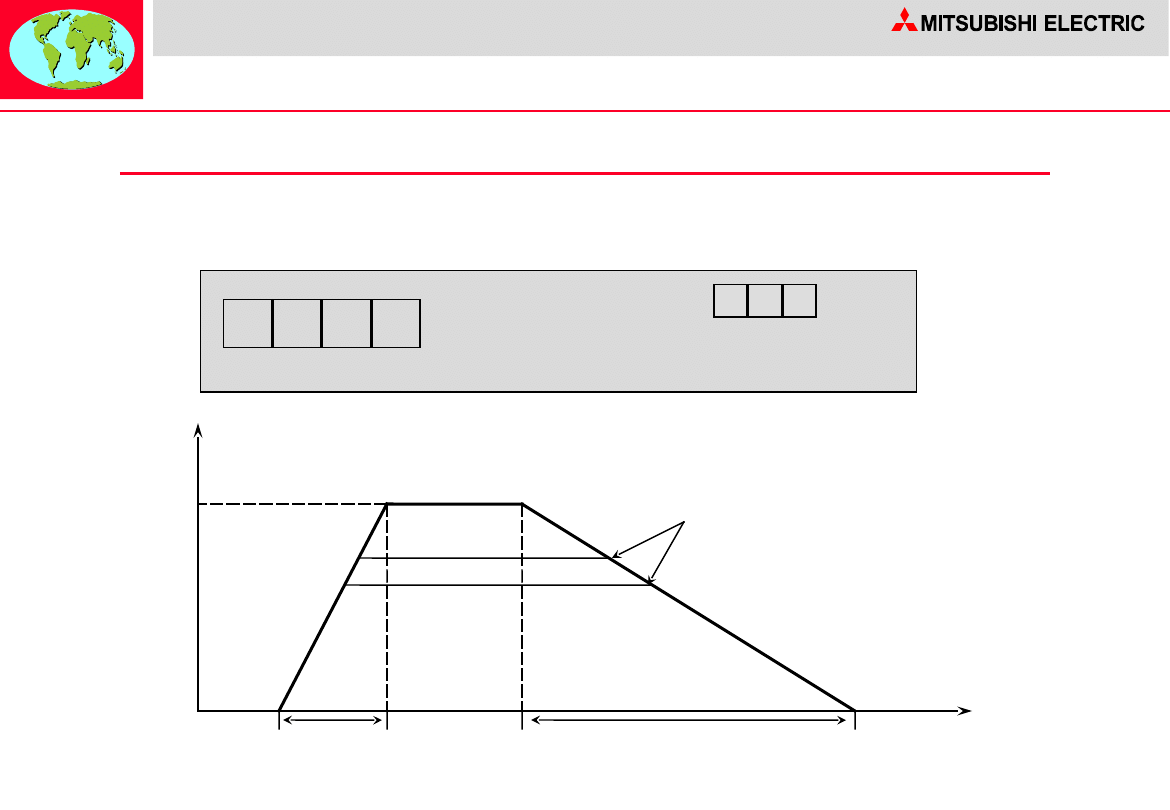
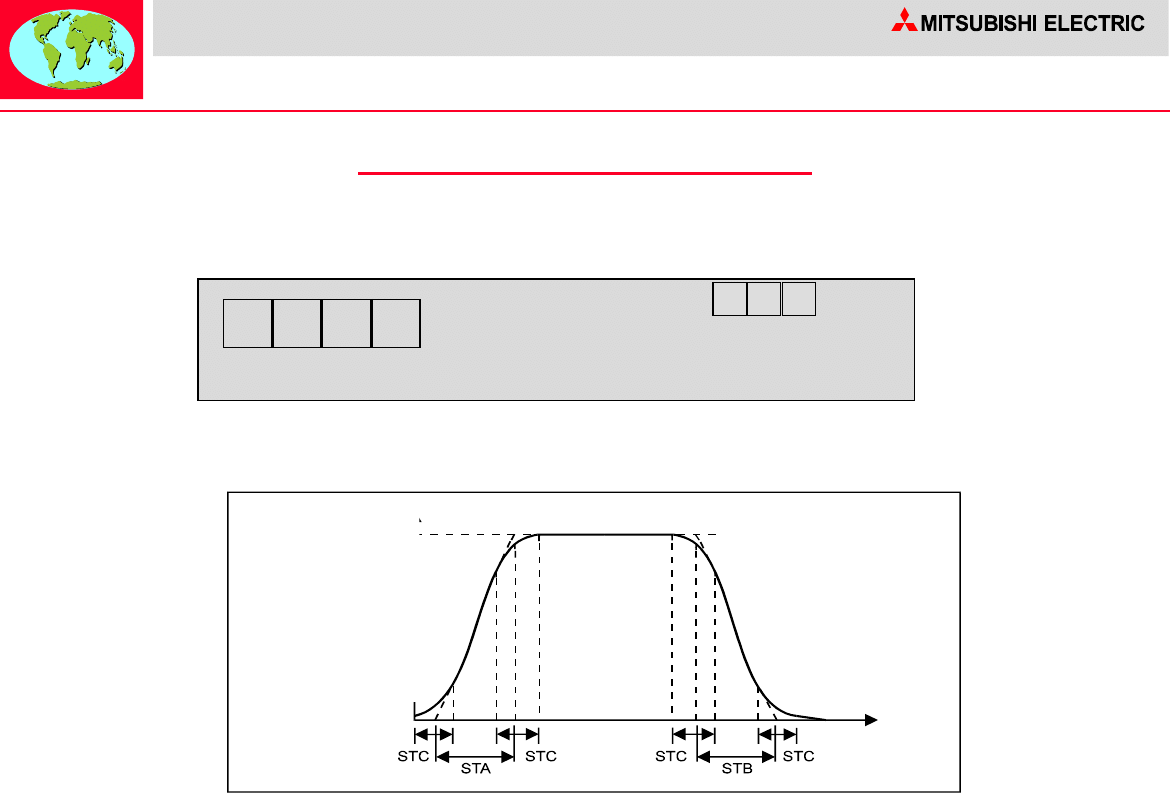
Parametr 11 “STA”; Parametr 12 “STB”
Stała czasowa rozpędzania/hamowania
0 0 0
0
Ustawienie
fabryczne
(0 ~ 20000
ms)
S
T
Prędko
ść
Czas
Wartość
parametru
No.11
Wartość
parametru
No.12
Prędkość
znamionow
a
Jeżeli prędkość zadana jest
niższa od znamionowej,
czas
rozpędzania/hamowania
będzie krótszy
Automatyka przemysłowa
Serwonapędy
73
MR-J2
MR-J2
S
S
Prędkość zadana
Parametr 13 “STC”
Stała czasowa sinoidalnej charakterystyki
rozpędzania/hamowania
Służy do płynnego rozpędzania/hamowania
obciążenia
0 0 0
0
Ustawienie
fabryczne
(0 ~ 1000 ms)
S
T
0
Czas
P
rę
d
ko
ść
se
rw
o
si
ln
ik
a
Automatyka przemysłowa
Serwonapędy
74
MR-J2
MR-J2
S
S
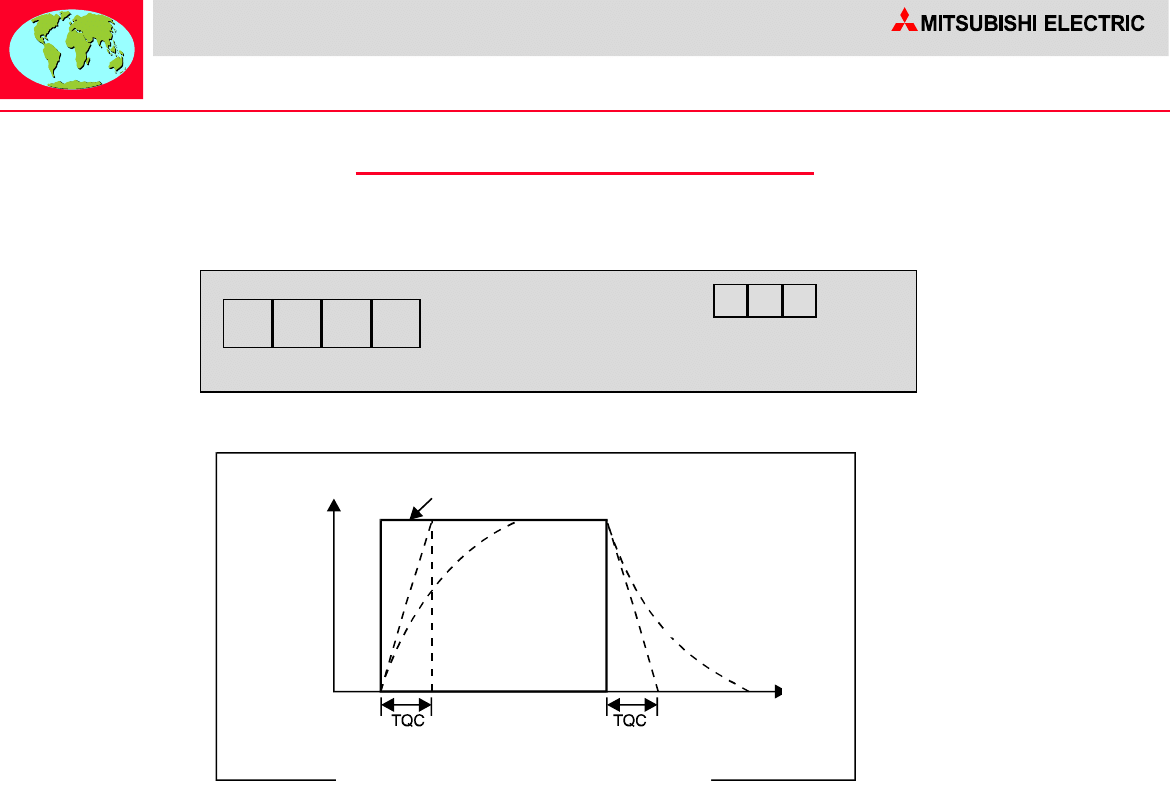
Parametr 14 “TQC”
0 0 0
0
Ustawienie
fabryczne
(0 ~ 20000
ms)
T
Stała czasowa zadawania momentu
Sygnał zadawania momentu
TQC: stała czasowa zadawania
momentu
Po
przefiltrowan
iu
Czas
Moment
Automatyka przemysłowa
Serwonapędy
75
MR-J2
MR-J2
S
S
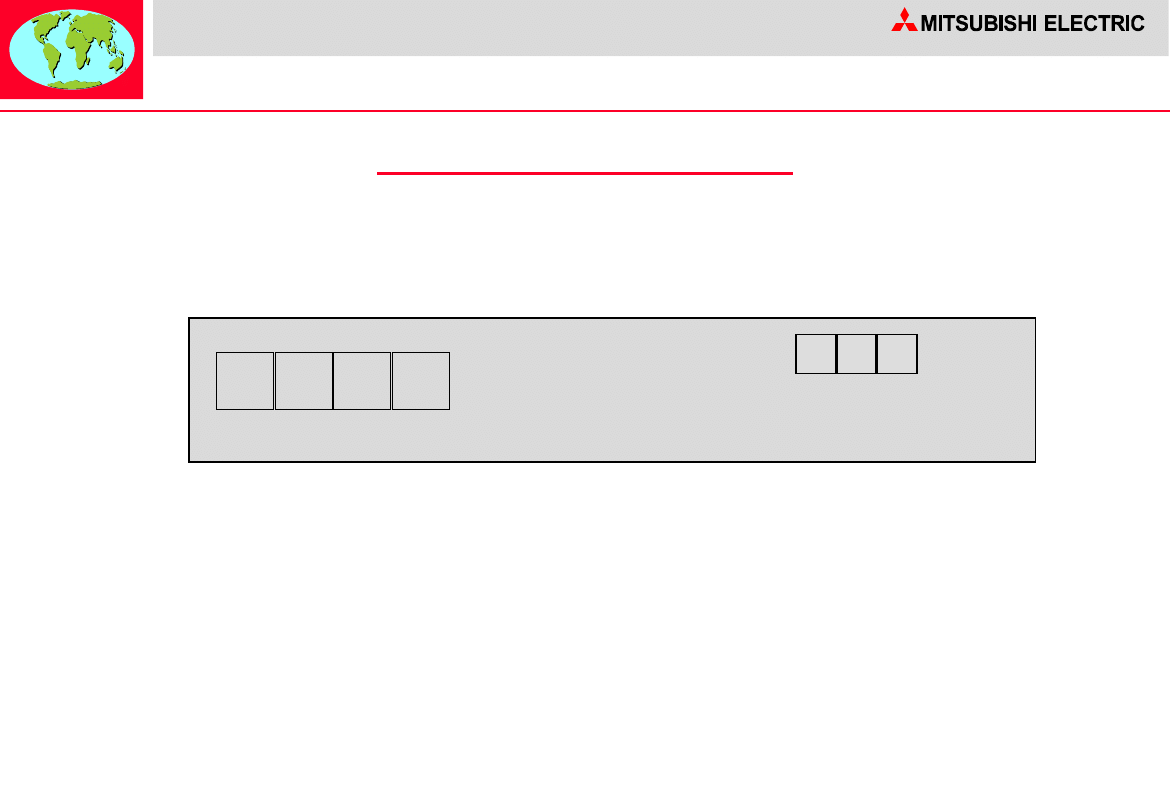
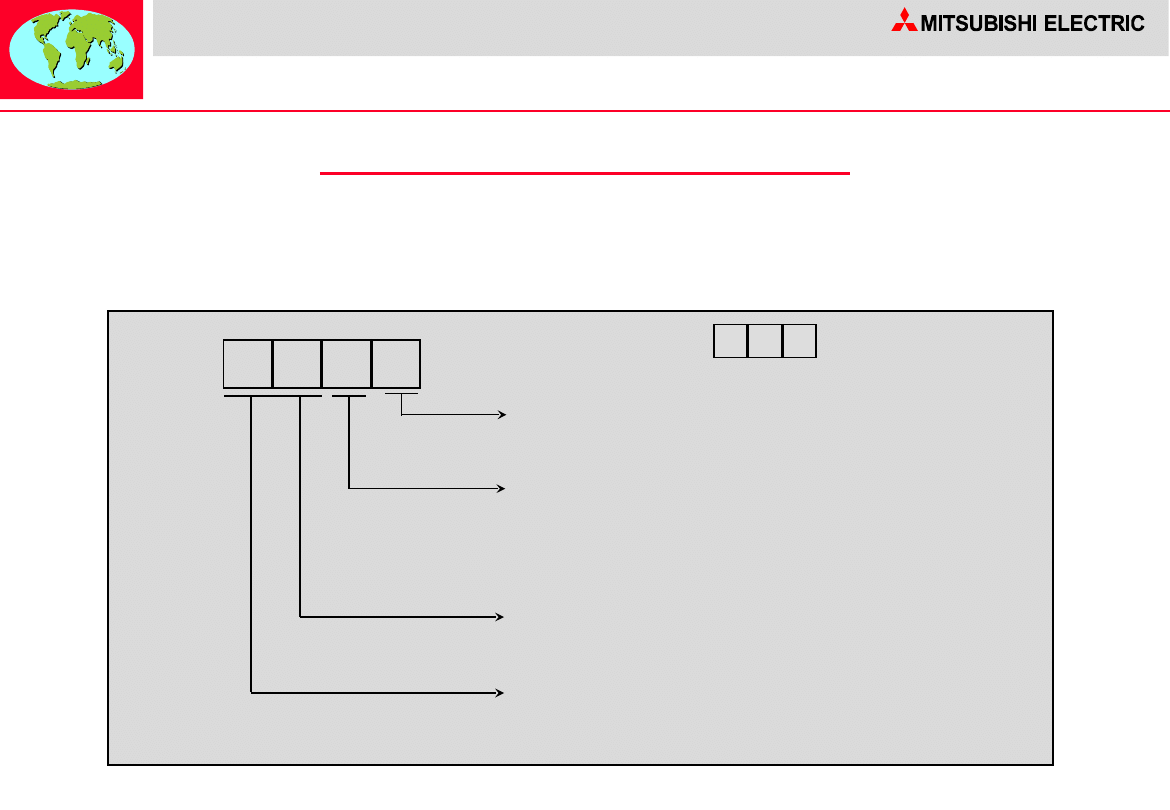
Parametr 15 “SNO” (*)
0 0
0
0
Ustawienie
fabryczne
(00 ~ 31)
P S
T
Numer stacji w sieci RS-422
Automatyka przemysłowa
Serwonapędy
76
MR-J2
MR-J2
S
S
Parametr 16 “BPS” (*)
Prędkość transmisji
Kasowanie historii alarmów po najbliższym
załączeniu
0 0
0
0
Ustawienie
fabryczne
P S
T
Prędkość transmisji RS422 /
RS 232
0: 9600 [bps] 1: 19200
[bps]
2: 38400 [bps] 3: 57600
[bps]
Kasowanie historii alarmów:
0: Nie
1: Tak (historia alarmów jest
kasowana przy najbliższym załączeniu
zasilania; parametr jest przy tym
automatycznie ustawiany na : „Nie”
Wybór standardu komunikacji
RS422 / RS232:
0: RS232C
1: RS422
Czas zwłoki odpowiedzi:
0: Brak zwłoki
1: Zwłoka nie mniej niż 800s
Automatyka przemysłowa
Serwonapędy
77
MR-J2
MR-J2
S
S
Parametr 17 “MOD”
Analogowe wyjście monitorowania
0
1
0
0
Ustawienie
fabryczne
P S
T
Wyjście analogowe:
0: prędkość serwosilnika (±8V dla max.)
1: moment serwosilnika (±8V dla max.)
2: prędkość serwosilnika (+8V dla max.)
3: moment serwosilnika (+8V dla max.)
4: zadana wartość prądu (±8V dla max.)
5: częstotliwość impulsów zadających (±8V
dla 500kHz)
6: impulsy uchybu (±10V dla 128 imp.)
7: impulsy uchybu (±10V dla 2048 imp.)
8: impulsy uchybu (±10V dla 8192 imp.)
9: impulsy uchybu (±10V dla 32768 imp.)
A: impulsy uchybu (±10V dla 131072 imp.)
B: Napięcie w obwodzie DC (+8V dla 400V)
Kanał 1
Kanał
2
Automatyka przemysłowa
Serwonapędy
78
MR-J2
MR-J2
S
S
Ustawienie
fabryczne
0 0
0
0
Wybór stanu wyświetlacza po
załączeniu zasilania
0: Skumulowana liczba impulsów enkodera
1: prędkość serwosilnika
2: impulsy uchybu
3: Skumulowana liczba impulsów
zadawania
4: Częstotliwość impulsów zadawania
5: Sygnał zadawania prędkości (Uwaga1)
6: Sygnał zadawania momentu (Uwaga 2)
7: Współczynnik obciążenia
regeneracyjnego
8: Współczynnik obciążenia znamionowego
9: Współczynnik obciążenia szczytowego
A: Pozycja w ramach jednego obrotu
B: Licznik pozycji absolutnej
C: Współczynnik momentu bezwładności
obciążenia
Parametr 18 “DMD” (*)
Wybór stanu wyjściowego wyświetlacza
Wyjściowy stan
wyświetlacza w
poszczególnych trybach
regulacji
0: zależnie od trybu regulacji
1: zależnie od ustawienia
pierwszej cyfry parametru
Uwaga 1: W trybie regulacji prędkości. Sygnał ograniczenia prędkości w trybie
momentu.
Uwaga 2: W trybie regulacji momentu. Sygnał ograniczenia momentu w trybie
prędkości.
Tryb regulacji
Wyjściowy stan wyświetlacza
P
Skumulowana liczba impulsów
P / S
Skumulowana liczba impulsów / prędkość serwosilnika
S
Prędkość serwosilnika
S / T
Prędkość serwosilnika / napięcie zadawania momentu
T
Sygnał zadawania momentu
T /P
Sygnał zadawania momentu/skumulowana liczba impulsów
P S
T
Automatyka przemysłowa
Serwonapędy
79
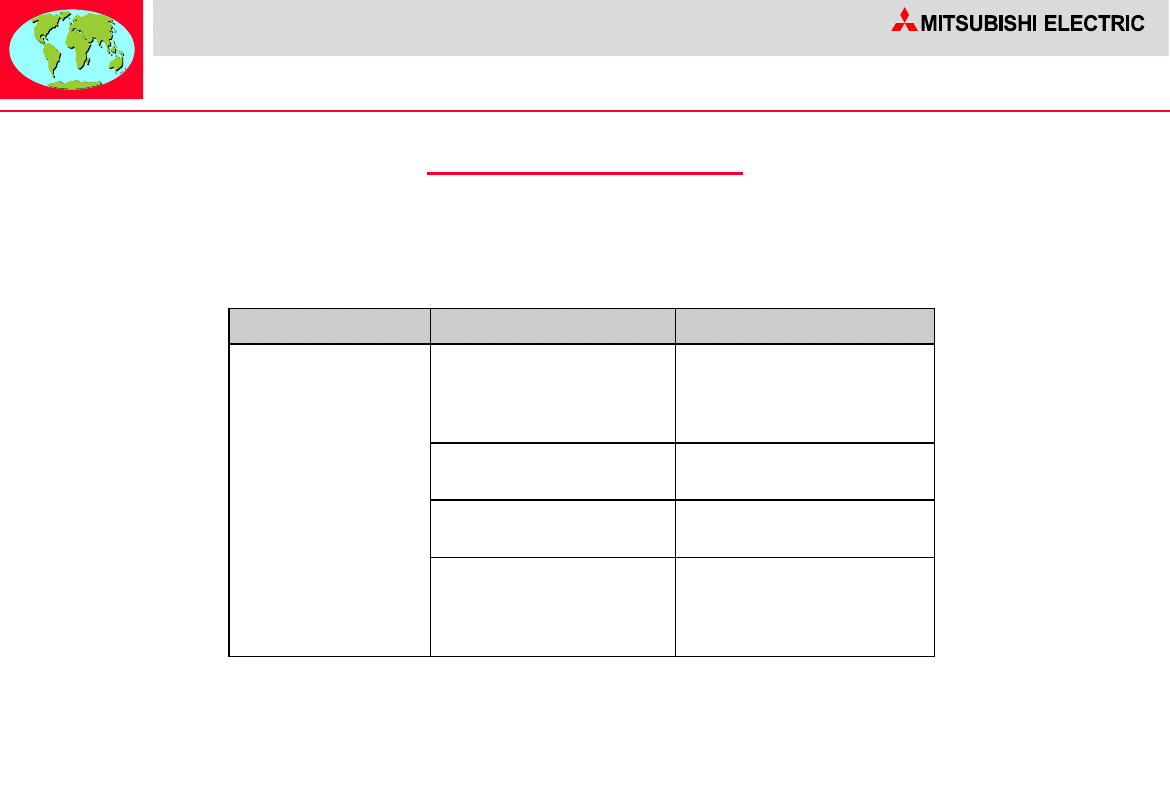
MR-J2
MR-J2
S
S
Parametr 19 “BCK”
Blokada parametrów
Poprzez ustawienie parametru 19 można ograniczyć odczyt
i/lub zapis wartości parametrów z wybranego zakresu.
Wartość
Zakres do odczytu Zakres do zapisu
0 0 0 0
parametry 0 – 19
parametry 0 – 19
0 0 0 A
parametr 19
parametr 19
0 0 0 B
parametry 0 – 49
parametry 0 – 19
0 0 0 C
parametry 0 – 49
parametry 0 – 49
Automatyka przemysłowa
Serwonapędy
80
MR-J2
MR-J2
S
S
Parametr 20 “OP2” (*)
Wybór funkcji 2
0
0 0
0
Ustawienie
fabryczne
P S
Restart po chwilowym zaniku
zasilania
0: Nie
1: Tak
Servo lock w stanie
zatrzymanym 0:
Nie
1: Tak
Tłumienie mikrowibracji
0: Nie
1: Tak
S
S
P
Automatyka przemysłowa
Serwonapędy
81
MR-J2
MR-J2
S
S
Parametr 21 “OP3” (*)
Wybór funkcji 3
0 0
0
0
Ustawienie
fabryczne
P
Wybór formy ciągu
impulsów zadawania
0: Podwójny ciąg impulsów
1:
Ciąg jednofazowy ze znakiem
2: Ciąg
dwufazowy A/B
Wybór logiki ciągu impulsów
0: Logika pozytywna
1: Logika negatywna
Automatyka przemysłowa
Serwonapędy
82
MR-J2
MR-J2
S
S
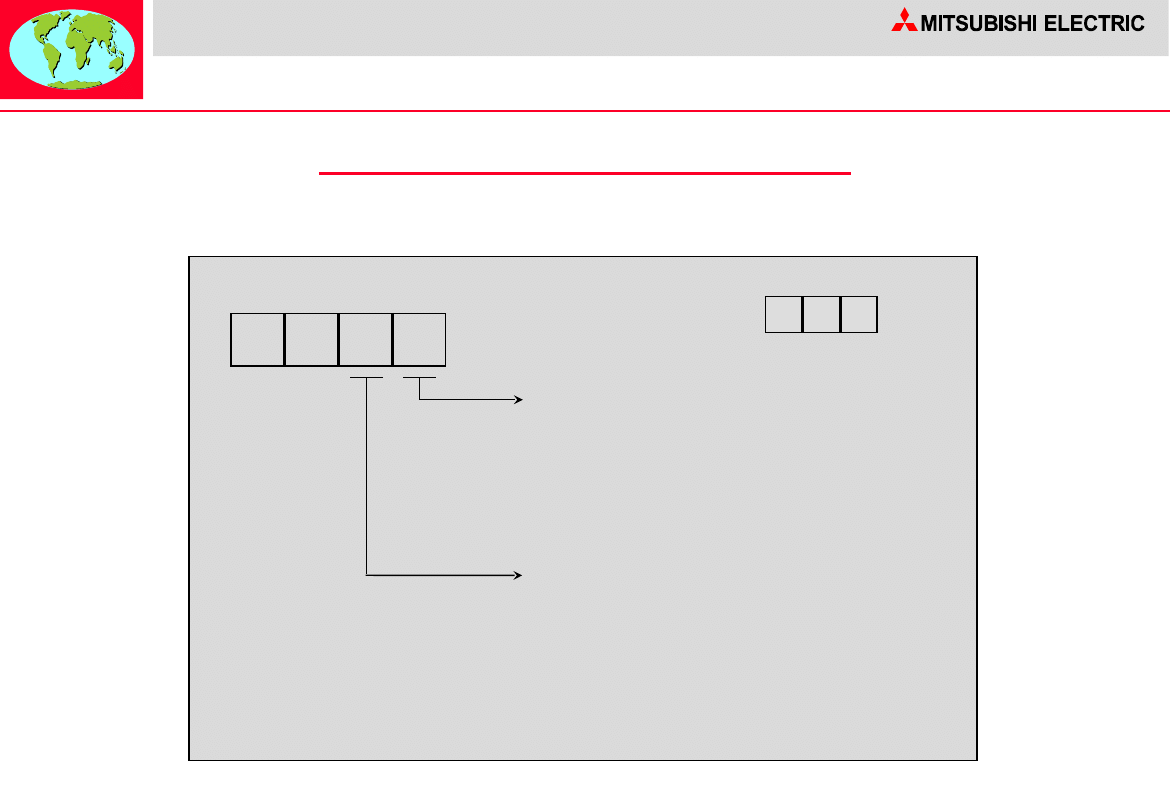
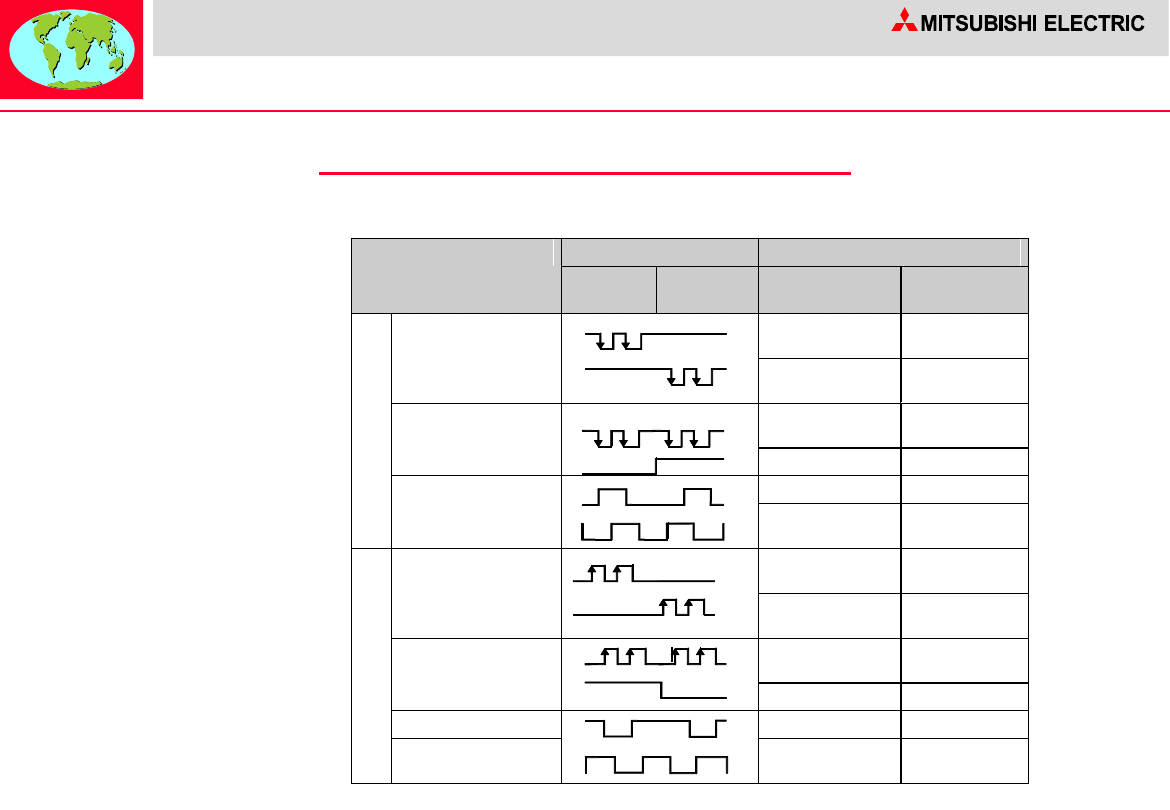
Parametr 21 “OP3” (*)
Wybór funkcji 3
Forma zadającego
Przebieg czasowy
Sposób podawania
ciągu impulsów
Obroty w
prawo
Obroty w
lewo
Otwarty kolektor
Sygnał
różnicowy
Ciąg zadający obroty
w prawo
Zaciski PP-SG
Zaciski PG-PP
Ciąg zadający obroty
w lewo (Wartość 0010)
Zaciski PP-SG
Zaciski NG-PN
Ciąg impulsów ze
znakiem
Zaciski PP-SG
Zaciski PG-PP
(Wartość 0011)
Zaciski PP-SG
Zaciski NG-PN
Ciąg impulsów faza A
Zaciski PP-SG
Zaciski PG-PP
Ciąg impulsów faza B
(Wartość 0012)
Zaciski PP-SG
Zaciski NG-PN
Ciąg zadający obroty
w prawo
Zaciski PP-SG
Zaciski PG-PP
Ciąg zadający obroty
w lewo (Wartość 0000)
Zaciski PP-SG
Zaciski NG-PN
Ciąg impulsów ze
znakiem
Zaciski PP-SG
Zaciski PG-PP
(Wartość 0001)
Zaciski PP-SG
Zaciski NG-PN
Ciąg impulsów faza A
Zaciski PP-SG
Zaciski PG-PP
Ciąg impulsów faza B
(Wartość 0002)
Zaciski PP-SG
Zaciski NG-PN
L
o
g
ik
a
n
e
g
a
ty
w
n
a
L
o
g
ik
a
p
o
zy
ty
w
n
a
Automatyka przemysłowa
Serwonapędy
83
MR-J2
MR-J2
S
S
Alarmy
Automatyka przemysłowa
Serwonapędy
84
MR-J2
MR-J2
S
S
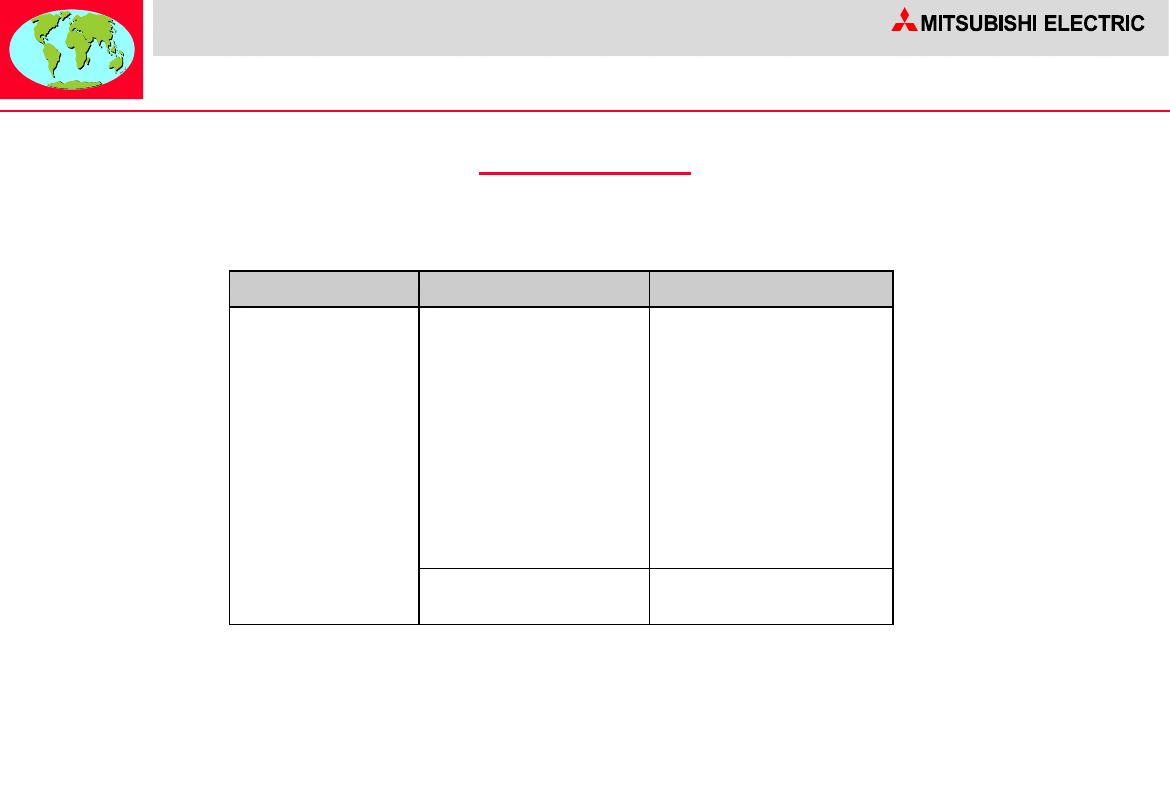
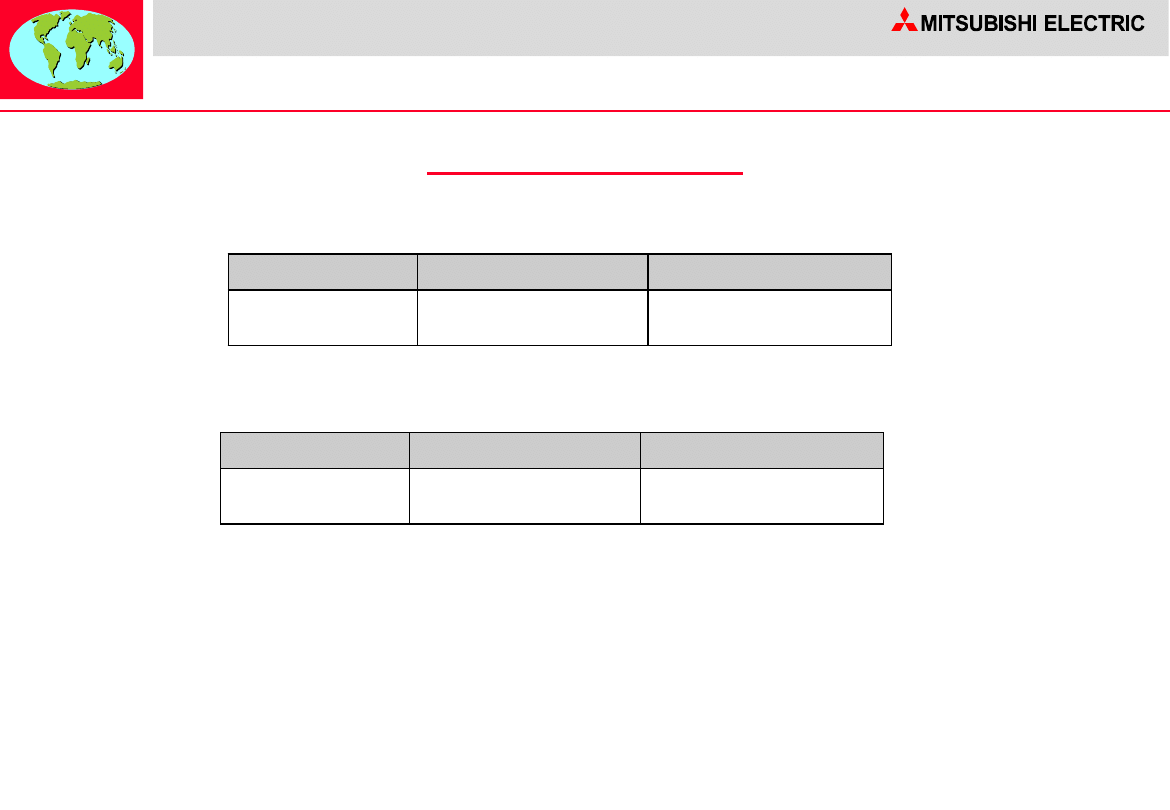
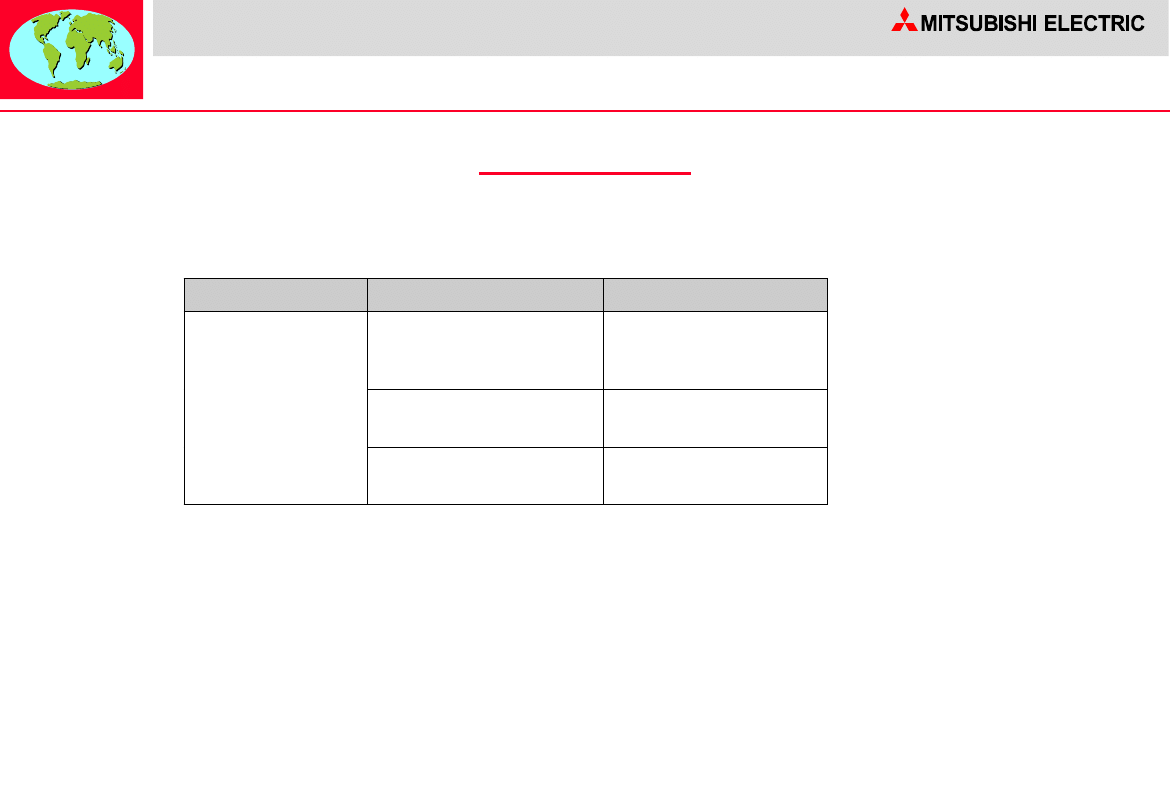
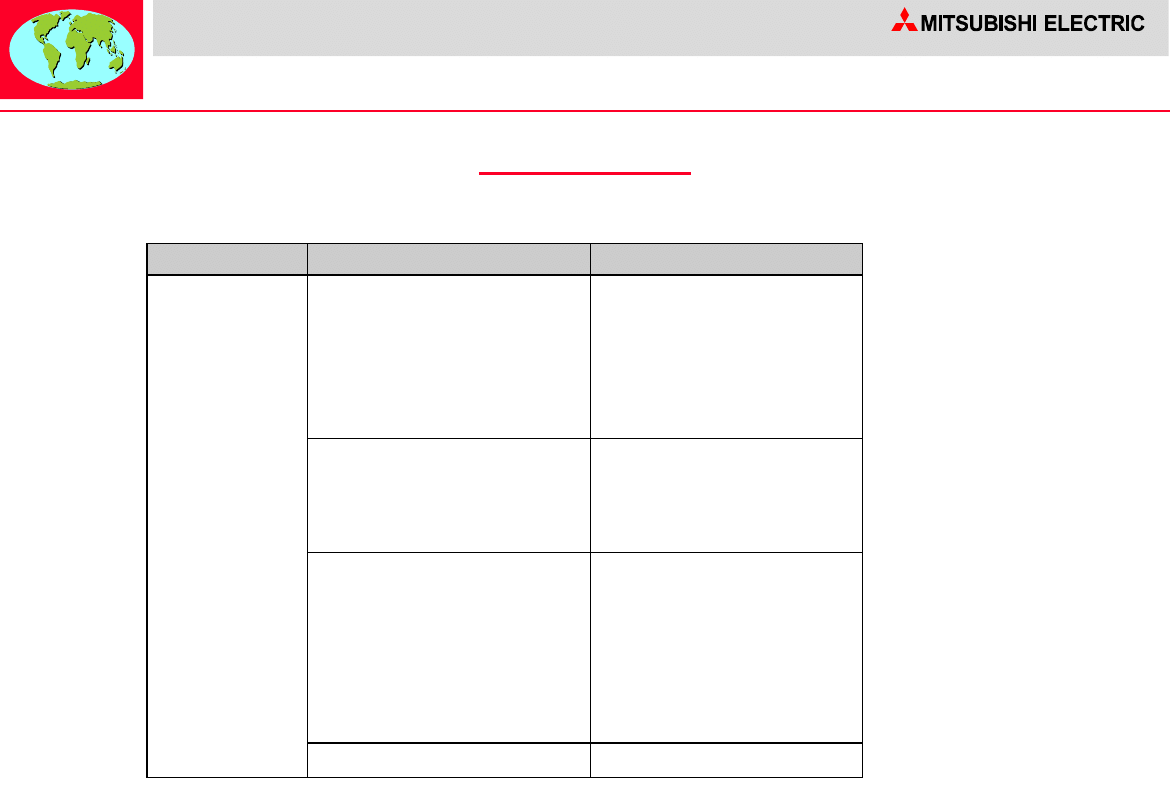
Alarm 10
Spadek napięcia
Alarm
Przyczyna
Przeciwdziałanie
Spadek napięcia
zasilania
serwowzmacniacza
poniżej 160 V
1. Obniżone napięcie w
sieci zasilającej
2. Chwilowy zanik
napięcia na czas powyżej
15ms
3. Spadek napięcia przy
starcie napędu
4. Załączenie zasilania
szybciej, niż po 5s od
wyłączenia
Skontrolować sieć
zasilającą
Uszkodzenie
serwowzmacniacza
Wymiana
serwowzmacniacza
Automatyka przemysłowa
Serwonapędy
85
MR-J2
MR-J2
S
S
Alarmy 11 - 12 - 13 - 15
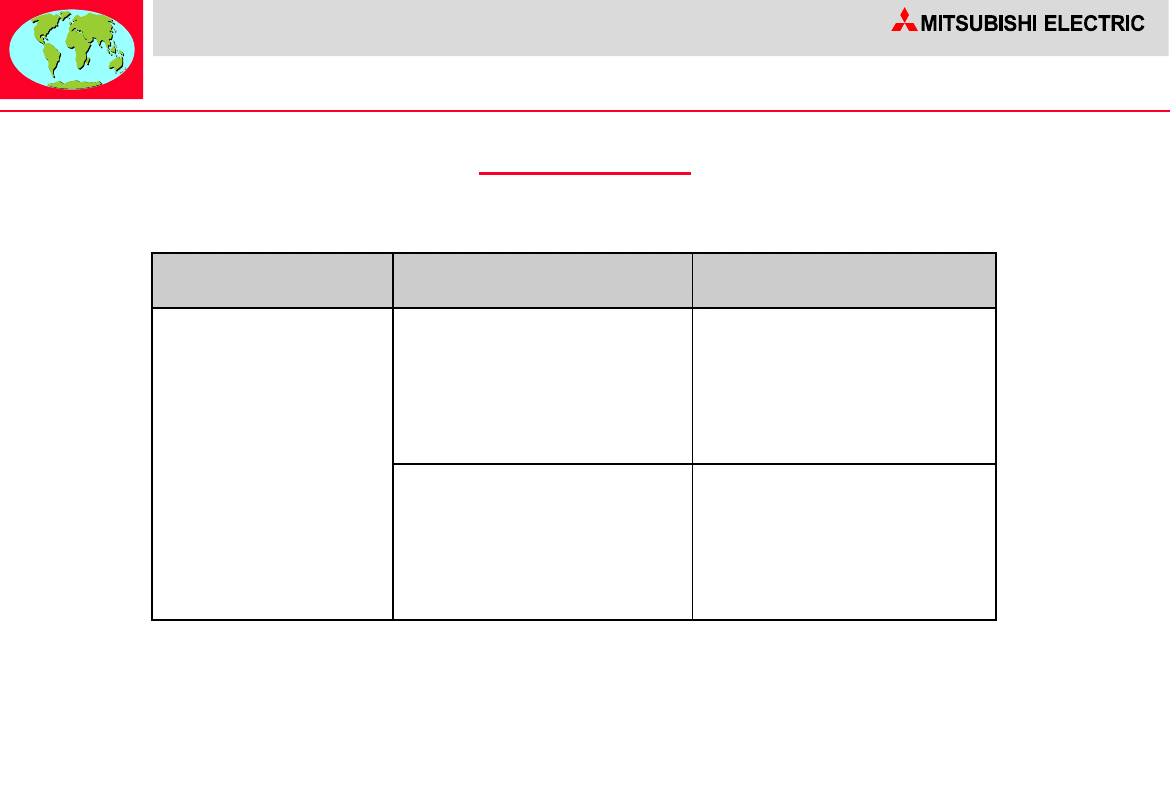
Alarm 11: błąd płyty głównej 1
Alarm 12: Błąd pamięci 1
Alarm 13: Błąd zegara
Alarm 15: Błąd pamięci 2
Alarm
Przyczyna
Przeciwdziałanie
Uszkodzenie na
płycie głównej
–
Wymiana
serwowzmacniacza
Alarm
Przyczyna
Przeciwdziałanie
Błąd RAM lub
ROM
Wadliwe podzespoły Wymiana
serwowzmacniacza
Alarm
Przyczyna
Przeciwdziałanie
Uszkodzenie na
płycie głównej
Wadliwe podzespoły Wymiana
serwowzmacniacza
Alarm
Przyczyna
Przeciwdziałanie
Błąd EEPROM
Wadliwe podzespoły Wymiana
serwowzmacniacza
Automatyka przemysłowa
Serwonapędy
86
MR-J2
MR-J2
S
S
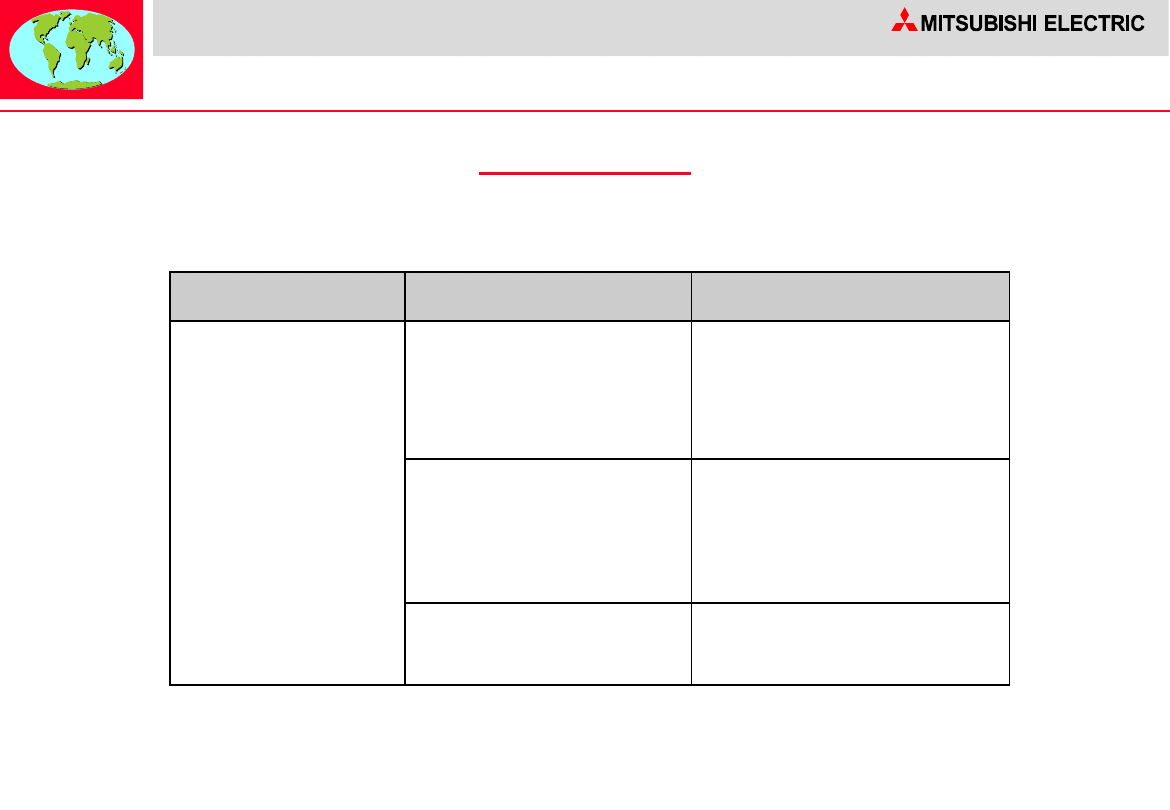
Alarm 16 / 20
Alarm 16: Błąd enkodera 1
Alarm 20: Błąd enkodera 2
Alarm
Przyczyna
Przeciwdziałanie
Błąd komunikacji
między enkoderem i
serwowzmacnia-
czem
1. Odłączenie enkodera
Sprawdzić połączenia
2. Uszkodzenie enkodera
Wymiana
serwowzmacniacza
3. Uszkodzenie przewodu
enkodera
Naprawa lub wymiana
przewodu
4. Nieodpowiednia
kombinacja
serwowzmacniacza i
serwosilnika
Sprawdzić dobór i typy
urządzeń
Automatyka przemysłowa
Serwonapędy
87
MR-J2
MR-J2
S
S
Alarm 17 / 18
Alarm 17: Błąd płyty głównej 2
Alarm 18: Błąd płyty głównej 3
Alarm
Przyczyna
Przeciwdziałanie
Błąd CPU
Wadliwe podzespoły
Wymiana
serwowzmacniacza
Alarm
Przyczyna
Przeciwdziałanie
Błąd CPU
Wadliwe podzespoły
Wymiana
serwowzmacniacza
Automatyka przemysłowa
Serwonapędy
88
MR-J2
MR-J2
S
S
Alarm 25
Alarm 25: Utracona wartość absolutna pozycji
Alarm
Przyczyna
Przeciwdziałanie
Błąd danych
absolutnej
pozycji
Spadek napięcia na
kondensatorze w
enkoderze
Wyłaczyć zasilanie na
kilka minut, następnie
wykonać powrót do
punktu bazowego
Automatyka przemysłowa
Serwonapędy
89
MR-J2
MR-J2
S
S
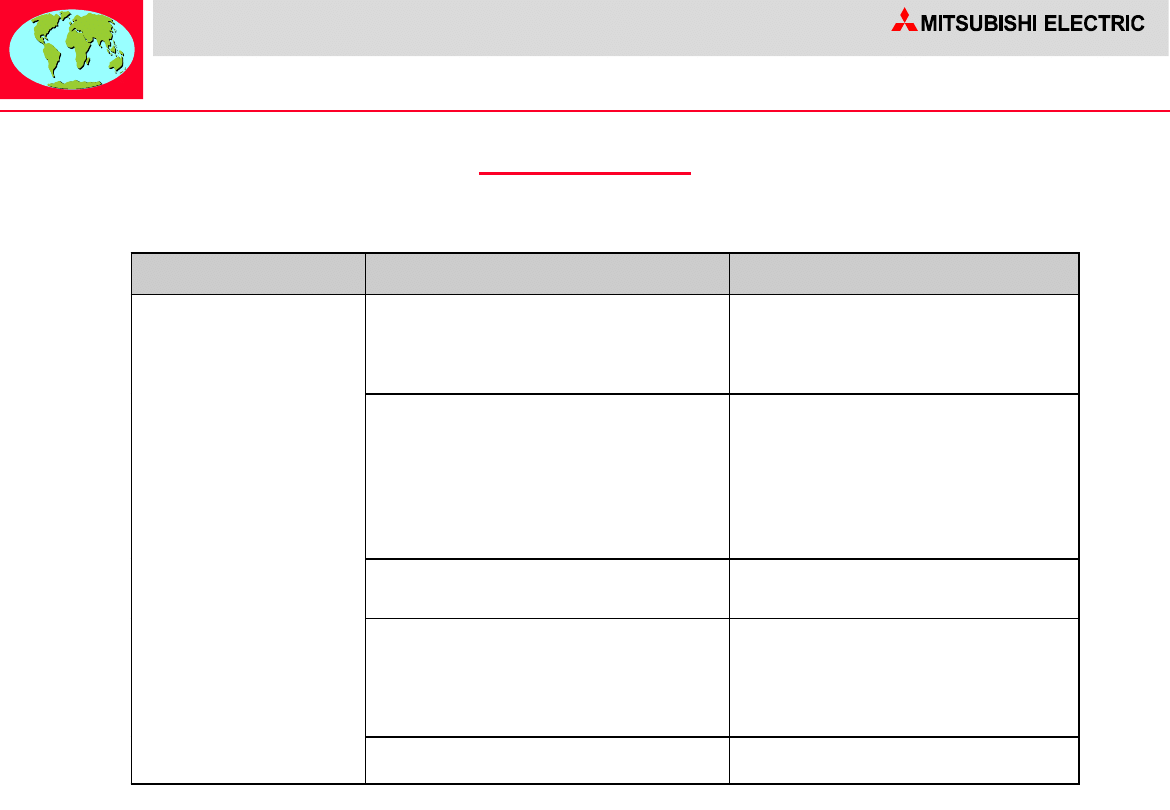
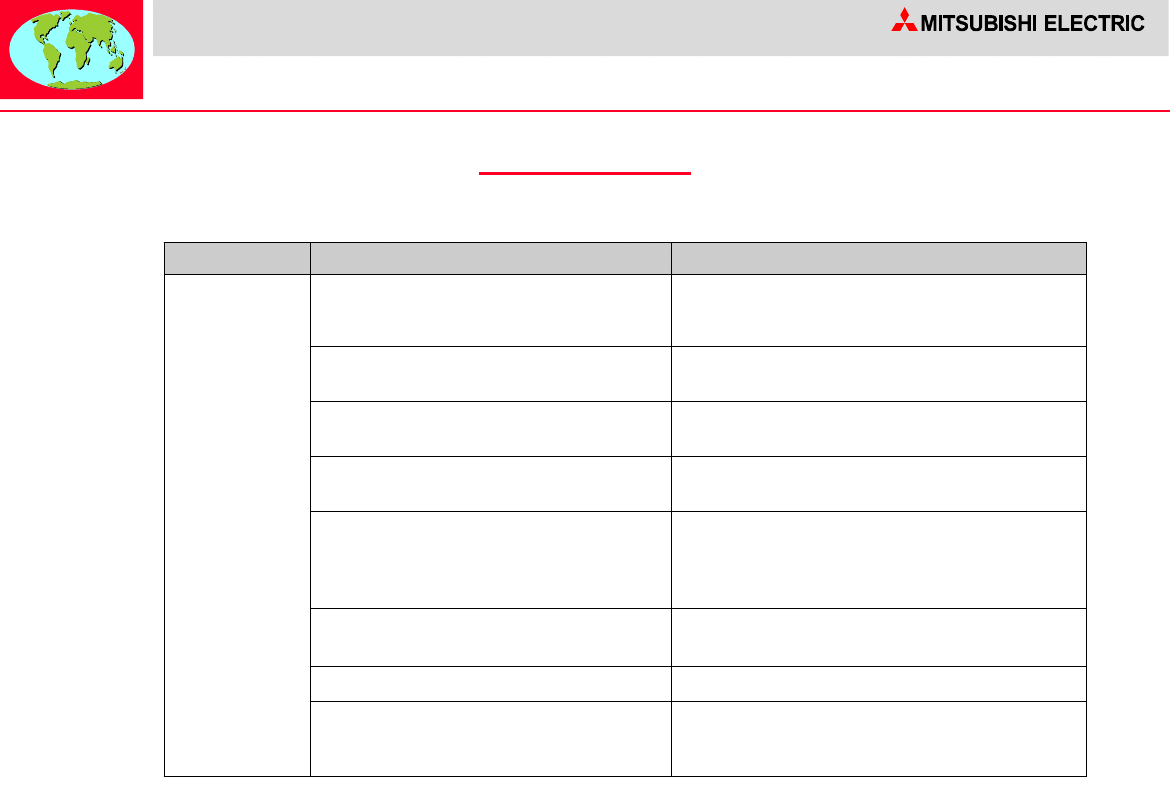
Alarm 30
Alarm 30 : Błąd hamowania regeneracyjnego
Alarm
Przyczyna
Przeciwdziałanie
Przekroczona
dopuszczalna moc
hamowania wbudowanego
lub zewnętrznego opornika
hamującego
Niewłaściwe ustawienie parametru 0
Ustawić właściwie
Nie podłączony lub niewłaściwie
podłączony opornik hamujący
(wbudowany lub zewnętrzny)
Podłączyć prawidłowo
Wysoka powtarzalność lub długi czas
hamowania spowodowały
przekroczenie dopuszczalnej mocy
hamowania wbudowanego lub
zewnętrznego opornika hamującego.
Obniżyć częstotliwość pozycjonowania.
Zastosować układ hamowania większej
mocy.
Zredukować obciążenie.
Napięcie zasilania przekroczyło
260V.
Skontrolować sieć zasilającą.
Błąd tranzystora
hamującego
Uszkodzenie lub przegrzanie
tranzystora hamującego.
Sprawdzić serwowzmacniacz.
Uszkodzenie wbudowanego lub
zewnętrznego opornika hamującego.
Wymiana serwowzmacniacza, opornika
hamującego lub zewnętrznego układu
hamowania.
Automatyka przemysłowa
Serwonapędy
90
MR-J2
MR-J2
S
S
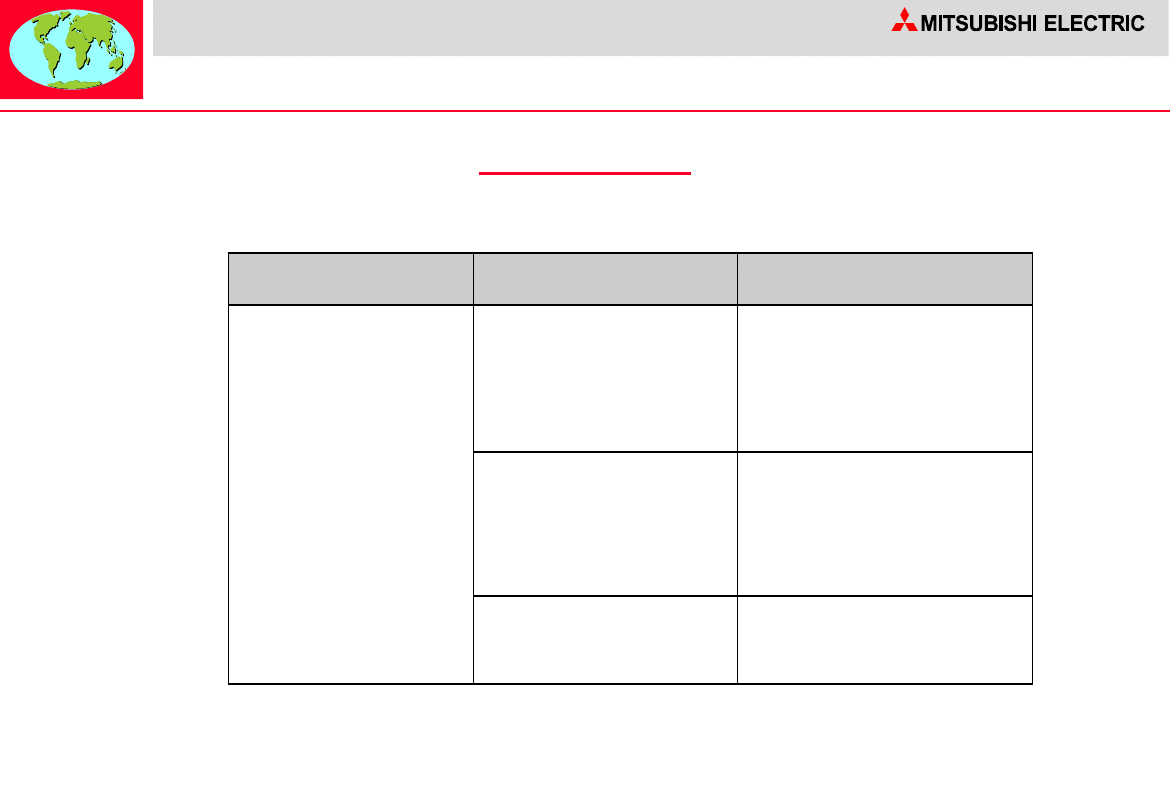
Alarm 31
Alarm 31 : Nadmierna prędkość
Alarm
Przyczyna
Przeciwdziałanie
Prędkość
przekroczyła
chwilową wartość
dopuszczalną
Częstotliwość impulsów
wejściowych przekroczyła
wartość chwilową
dopuszczalną.
Skorygować zadający ciąg
impulsów.
Niska wartość stałej czasowej
rozpędzania/hamowania
spowodowała duży przerzut
regulacji
Zwiększyć stałą czasową
rozpędzania/hamowania.
Niestabilność w
serwosystemie spowodowała
przerzut.
Zredukować wzmocnienie.
J eśli niemożliwe jest ustawienie
prawidłowej wartości
wzmocnienia:
Zbyt wysoki współczynnik
przekładni elektronicznej.
(Parametry 3,4)
Sprawdzić ustawienia
parametrów 3 i 4.
Uszkodzenie enkodera.
Wymiana serwosilnika.
Automatyka przemysłowa
Serwonapędy
91
MR-J2
MR-J2
S
S
Alarm 32
Alarm 32 : Przetężenie (przeciążenie prądowe)
Alarm
Przyczyna
Przeciwdziałanie
Prąd wyjściowy
serwowzmacniacza
przekroczył wartość
dopuszczalną
Zwarcie pomiędzy fazami
wyjściowymi U,V,W
serwowzmacniacza.
Skontrolować połączenia.
Uszkodzony tranzystor mocy.
Wymiana serwowzmacniacza.
Alarm pojawia się w przypadku
załączenia zasilania przy
rozłączonych wszystkich złączach.
Wymiana serwowzmacniacza.
Zwarcie doziemne w fazach
wyjściowych serwowzmacniacza
U,V,W.
Skontrolować połączenia.
Zakłócenia w obwodach
zabezpieczeń przeciążeniowych.
Zastosować środki obniżające
zakłócenia.
Automatyka przemysłowa
Serwonapędy
92
MR-J2
MR-J2
S
S
Alarm 33
Alarm 33 : Przepięcie (przeciążenie napięciowe)
Alarm
Przyczyna
Przeciwdziałanie
Napięcie w
obwodzie DC
przekroczyło
400V
Niewłaściwie podłączony
opornik hamujący.
Sprawdzić zworę.
Podłączyć prawidłowo
Nie podłączony wewnętrzny
opornik hamujący.
Sprawdzić opornik i jego
podłączenie. Wymiana
serwowzmacniacza.
Uszkodzony tranzystor
hamujący.
Wymiana serwowzmacniacza.
Awaryjne wyłączenie
tranzystora hamującego.
Zainstalować zewnętrzny układ
hamujący lub zwiększyć jego
moc.
Automatyka przemysłowa
Serwonapędy
93
MR-J2
MR-J2
S
S
Alarm 35
Alarm 35 : Błąd zadającego ciągu impulsów
Alarm
Przyczyna
Przeciwdziałanie
Zbyt duża liczba
impulsów
zadających.
Zbyt wysoka
częstotliwość ciągu
impulsów.
Zredukować
częstotliwość ciągu
impulsów.
Zakłócenia w ciągu
impulsów
Zastosować środki
przeciw zakłóceniom.
Uszkodzony generator
impulsów.
Wymienić zadajnik.
Automatyka przemysłowa
Serwonapędy
94
MR-J2
MR-J2
S
S
Alarm 37
Alarm 37 : Błąd parametru
Alarm
Przyczyna
Przeciwdziałanie
Niewłaściwe
ustawienie
parametrów.
Błąd serwowzmacniacza
spowodował
niezamierzony zapis
parametrów.
Wymiana
serwowzmacniacza.
W parametrze 0 wybrano
opcję niedopuszczalną dla
danego modelu
serwowzmacniacza
Ustawić prawidłowo
parametr 0.
Automatyka przemysłowa
Serwonapędy
95
MR-J2
MR-J2
S
S
Alarm 46
Alarm 46 : Przegrzanie serwosilnika
Alarm
Przyczyna
Przeciwdziałanie
Wzrost temperatury
silnika zaktywizował
zabezpieczenie
termiczne.
Temperatura otoczenia
silnika przewyższa 40 C.
Zmienić warunki
środowiskowe tak, by
utrzymać temperaturę w
zakresie 0 do 40°C.
Silnik jest przeciążony.
Zmniejszyć obciążenie.
Skontrolować tryb pracy.
Zastosować serwosilnik
większej mocy.
Uszkodzony czujnik
termiczny w enkoderze.
Wymiana serwosilnika.
Automatyka przemysłowa
Serwonapędy
96
MR-J2
MR-J2
S
S
Alarm 50
Alarm 50 : Przeciążenie 1
Alarm
Przyczyna
Przeciwdziałanie
Nadmierne obciążenie
Prąd wyjściowy przekracza
długotrwale wartość znamionową
serwowzmacniacza.
Zredukować obciążenie.
Skontrolować tryb pracy.
Użyć serwonapędu wyższej mocy.
Niestabilność serwosystemu powoduje
wzbudzenie.
Powtórnie wykonać rozpędzanie i
hamowanie w trybie autotuningu.
Zmienić ustawienie szybkości
reakcji dla autotuningu.
Wyłączyć autotuning i dostroić
wzmocnienie ręcznie.
Kolizja w maszynie.
Skontrolować tryb pracy.
Zainstalować łączniki krańcowe.
Błędne podłączenie serwosilnika.
Zaciski U, V, W serwowzmacniacza
nie odpowiadają zaciskom U, V, W
serwosilnika.
Sprawdzić połączenia.
Uszkodzony enkoder.
Wymiana serwosilnika.
Automatyka przemysłowa
Serwonapędy
97
MR-J2
MR-J2
S
S
Alarm 51
Alarm 51 : Przeciążenie 2
Alarm
Przyczyna
Przeciwdziałanie
Kolizja w
maszynie lub tp.
spowodowały
przepływ w ciągu
kilku sekund
prądu o wartości
wyższej od
maksymalnej.
Kolizja w maszynie.
Sprawdzić tryb pracy.
Zainstalować łączniki
krańcowe.
Błędne podłączenie
serwosilnika. Zaciski U, V, W
serwowzmacniacza nie
odpowiadają zaciskom U, V, W
serwosilnika.
Sprawdzić połączenia.
Niestabilność serwosystemu
powoduje wzbudzenie.
Powtórnie wykonać
rozpędzanie i hamowanie w
trybie autotuningu.
Zmienić ustawienie
szybkości reakcji dla
autotuningu.
Wyłączyć autotuning i
dostroić wzmocnienie
ręcznie.
Uszkodzony enkoder.
Wymiana serwosilnika.
Automatyka przemysłowa
Serwonapędy
98
MR-J2
MR-J2
S
S
Alarm 52
Alarm 52 : Nadmierna wartość uchybu
Alarm
Przyczyna
Przeciwdziałanie
Wartość uchybu
przekracza 80k
impulsów.
Czas rozpędzania/hamowania jest zbyt krótki. Zwiększyć stałą czasową rozpędzania/hamowania.
Próg ograniczenia momentu (parametr 28) jest
zbyt niski).
Podwyższyć próg ograniczenia momentu
Rozruch niemożliwy wskutek
niewystarczającego momentu.
Skontrolować moc zainstalowaną źródła zasilania.
Zastosować serwonapęd wyższej mocy.
Wzmocnienie regulatora położenia 1
(Parametr 6) jest zbyt niskie.
Podwyższyć wartość ustawienia i dostroić do
zapewnienia prawidłowej pracy.
Wał serwosilnika został obrócony o cały obrót
zewnętrzną siłą.
J eżeli używane jest ograniczenie momentu,
podwyższyć ograniczenie.
Zredukować obciążenie.
Zastosować serwonapęd wyższej mocy.
Kolizja w maszynie.
Skontrolować tryb pracy.
Zainstalować łączniki krańcowe.
Uszkodzenie enkodera
Wymiana serwosilnika.
Błędne podłączenie serwosilnika. Zaciski U, V,
W serwowzmacniacza nie odpowiadają
zaciskom U, V, W serwosilnika.
Podłączyć prawidłowo.
Automatyka przemysłowa
Serwonapędy
99
MR-J2
MR-J2
S
S
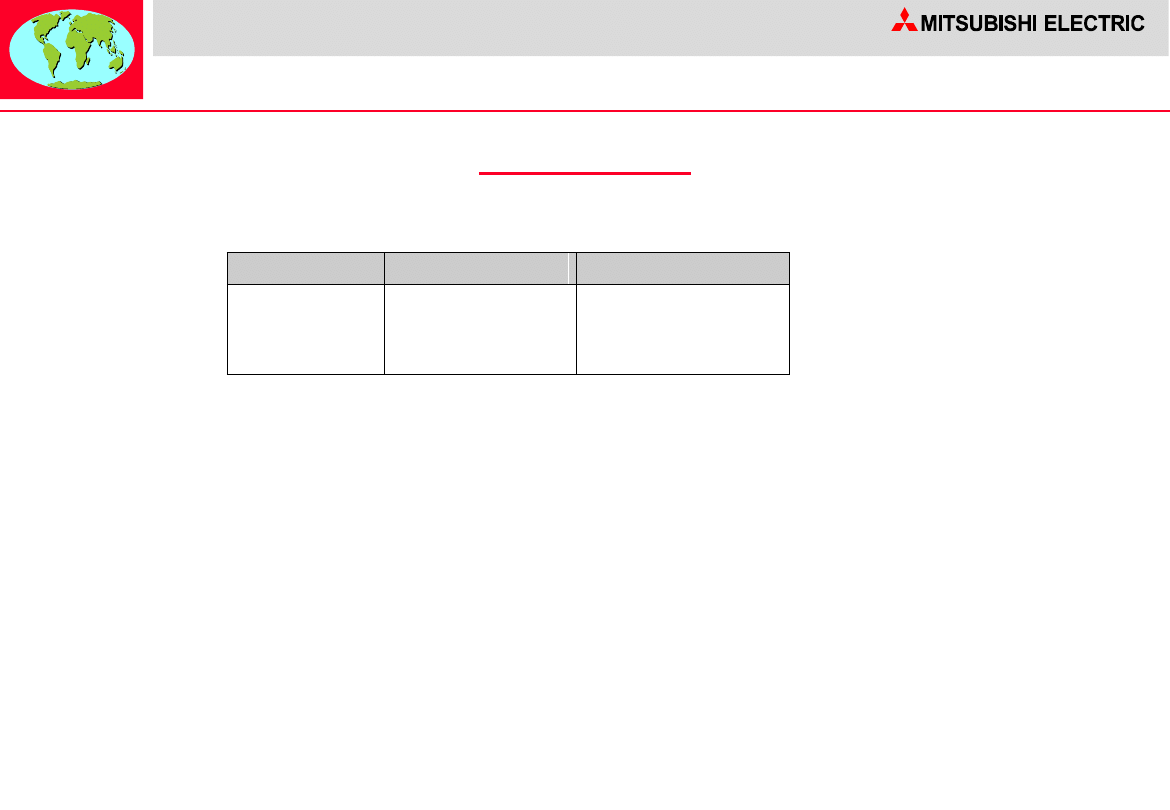
Alarm 8E
Alarm 8E : Błąd komunikacji RS-232C
Alarm
Przyczyna
Przeciwdziałanie
Błąd komunikacji
pomiędzy
serwowzmacniaczem i
komputerem.
Rozłączone złącze.
Podłączyć prawidłowo.
Uszkodzony przewód
komunikacyjny (przerwa
lub zwarcie).
Naprawa lub wymiana
przewodu.
Błąd lub uszkodzenie po
stronie PC
Wymienić PC.
Automatyka przemysłowa
Serwonapędy
100
MR-J2
MR-J2
S
S
Alarm 8888
Alarm 8888 : Watchdog
Alarm
Przyczyna
Przeciwdziałanie
Błąd CPU
Uszkodzenie podzespołów
serwowzmacniacza.
Wymiana
serwowzmacniacza
Włączenie zasilania przy
rozłączonych wszystkich
złączach
Sprawdzić połączenia
Automatyka przemysłowa
Serwonapędy
101
MR-J2
MR-J2
S
S
Ostrzeżenia
Automatyka przemysłowa
Serwonapędy
102
MR-J2
MR-J2
S
S
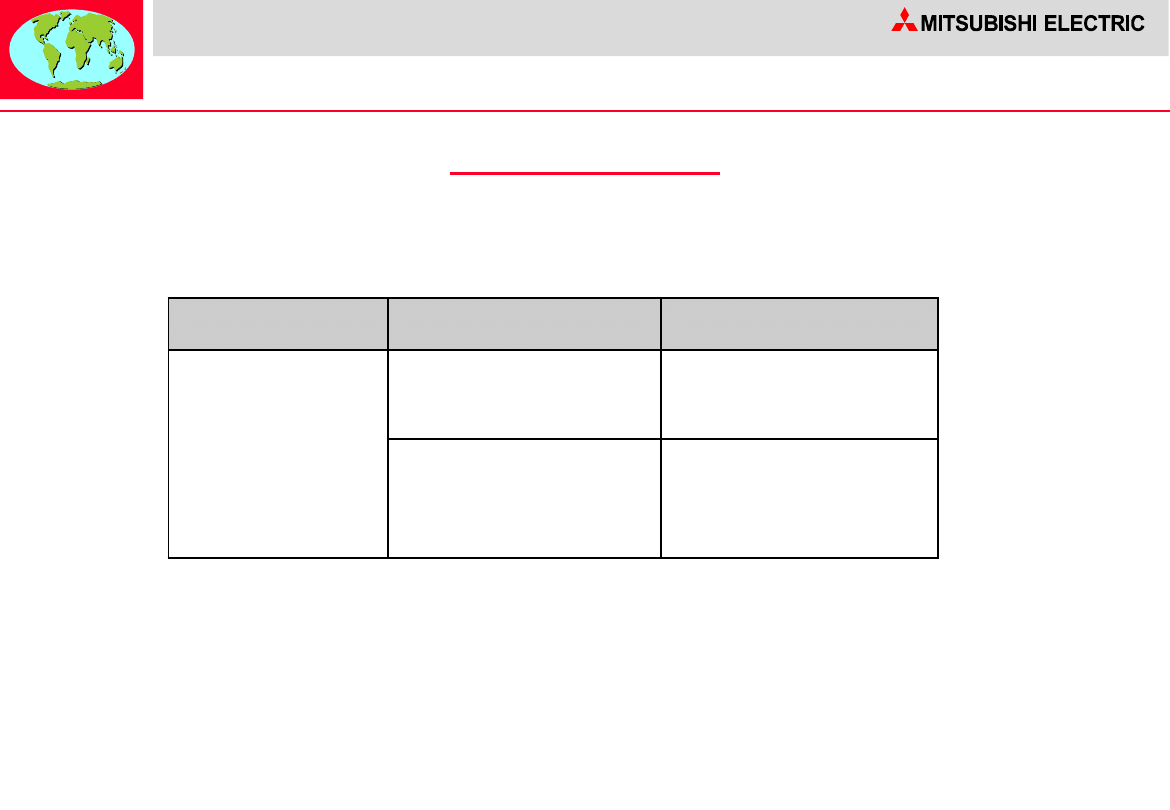
Alarm 92
Alarm 92 : Ostrzeżenie o rozłączeniu / rozładowaniu
baterii
Alarm
Przyczyna
Przeciwdziałanie
Niskie napięcie
baterii
podtrzymującej
Przerwa w przewodzie
enkodera.
Naprawa lub wymiana
przewodu.
Bateria zużyta (napięcie
poniżej 2,8V)
Wymiana baterii.
Automatyka przemysłowa
Serwonapędy
103
MR-J2
MR-J2
S
S
Alarm 96
Alarm 96 : Błąd pozycji zerowej
Alarm
Przyczyna
Przeciwdziałanie
Niemożliwe
wykonanie
powrotu na
pozycję zerową
(bazową)
Wartość zadana nie
jest zerowa pomimo
skasowania uchybu
Zapewnić brak
podawania impulsów
zadających po
wyzerowaniu licznika
uchybu
Pozostająca wartość
licznika impulsów
uchybu jest wyższa,
niz wartość zadana
Zapewnić brak
podawania impulsów
zadających po
wyzerowaniu licznika
uchybu
Zbyt wysoka
prędkość dojścia
Zmniejszyć prędkość
dojścia
Automatyka przemysłowa
Serwonapędy
104
MR-J2
MR-J2
S
S
Alarm 9F
Alarm 9F : Ostrzeżenie przed rozładowaniem
baterii
Alarm
Przyczyny
Przeciwdziałanie
Obniżone
napięcie baterii
podtrzymującej.
Napięcie baterii
niższe niż 3,2 V.
Wymiana baterii.
Automatyka przemysłowa
Serwonapędy
105
MR-J2
MR-J2
S
S
Alarm E0
Alarm E0 : Ostrzeżenie o nadmiernej mocy
hamowania
Alarm
Przyczyna
Przeciwdziałanie
Istnieje możliwość,
że moc
regeneracji
przekroczy
dopuszczalną moc
wbudowanego lub
zewnętrznego
opornika
hamującego.
Obciążenie opornika
hamującego
osiągnęło lub
przekroczyło 85%
mocy dopuszczalnej.
Należy wyświetlić
display stanu i
sprawdzić
współczynnik
obciążenia
regeneracyjnego.
Zmniejszyć
częstotliwość
zatrzymywania.
Wymienić opornik
hamujący na model
o większej mocy.
Zmniejszyć
obciążenie
Automatyka przemysłowa
Serwonapędy
106
MR-J2
MR-J2
S
S
Alarm E1
Alarm E1 : Ostrzeżenie przed przeciążeniem
Alarm
Przyczyna
Przeciwdziałanie
Istnieje
zagrożenie
wystąpienia
alarmu
przeciążenia 1
lub 2.
Obciążenie wzrasta
do wartości 85% lub
więcej poziomu
zadanego dla alarmu
przeciążenia 1 lub 2.
Patrz Alarmy: 50, 51.
Automatyka przemysłowa
Serwonapędy
107
MR-J2
MR-J2
S
S
Alarm E3
Alarm E3 : Ostrzeżenie absolutnego licznika
pozycji
Alarm
Przyczyna
Przeciwdziałanie
Brak impulsów
pozycji
absolutnej z
enkodera
Zakłócenia sygnałów
enkodera
Zastosować środki
ochrony przed
zakłóceniami
Uszkodzony enkoder Wymiana serwosilnika.
Automatyka przemysłowa
Serwonapędy
108
MR-J2
MR-J2
S
S
Alarm E5
Alarm E5 : Time-out transmisji wartości ABS
Alarm
Przyczyna
Przeciwdziałanie
Błąd transmisji
danych o pozycji
absolutnej
Błąd w programie
sterownika
Skorygować program
Błędne podłączenie
zacisku CN1B-9 lub
CN1B-6.
Podłączyć
prawidłowo
Automatyka przemysłowa
Serwonapędy
109
MR-J2
MR-J2
S
S
Alarm E6
Alarm E6 : Zatrzymanie awaryjne serwonapędu
Alarm
Przyczyna
Przeciwdziałanie
Rozwarte zaciski
EMG-SG
Podano sygnał
zatrzymania
awaryjnego
Po usunięciu
przyczyny i
zapewnieniu
bezpieczeństwa,
zresetować sygnał.
Automatyka przemysłowa
Serwonapędy
110
MR-J2
MR-J2
S
S
Alarm E9
Alarm E9 : Ostrzeżenie o braku zasilania obwodu
głównego
Alarm
Przyczyna
Przeciwdziałanie
Sygnał Servo on
(SON) został
załączony przy
wyłączonym
zasilaniu obwodu
głównego.
Sygnał Servo on
(SON) został
załączony przy
wyłączonym zasilaniu
obwodu głównego.
Włączyć zasilanie
obwodu głównego.
Automatyka przemysłowa
Serwonapędy
111
MR-J2
MR-J2
S
S
Alarm EA
Alarm EA : Ostrzeżenie ABS – brak Servo ON
Alarm
Przyczyna
Przeciwdziałanie
Sygnał Servo on
(SON) nie został
załączony w
ciągu 1s po
przejściu
serwowzmacniac
za w tryb
transmisji danych
pozycji
absolutnej.
Błędny program
sterownika PLC
Skorygować program.
Błędne podłączenie
sygnału SON.
Poprawić podłączenie
Automatyka przemysłowa
Serwonapędy
112
MR-J2
MR-J2
S
S
Obliczanie
Serwosystemu
Automatyka przemysłowa
Serwonapędy
113
MR-J2
MR-J2
S
S
Dobór mocy serwosilnika
Dla dokonania doboru silnika potrzebne są następujące dane:
1. Prędkość obrotowa (N)
2. Czas przyspieszania i hamowania (t
sa
, t
sd
)
3. Cykl pracy
4. Moment obciążenia (T
L
)
5. Moment bezwładności obciążenia (J
L
)
6.
Moment napędowy silnika (T
M
)
7.
Moment bezwładności silnika (J
M
)
9. Moment napędowy przyspieszania i hamowania (T
Ma
, T
Md
)
10. Wartość skuteczna (średniokwadratowa)
momentu napędowego silnika (T
rms
)
Automatyka przemysłowa
Serwonapędy
114
MR-J2
MR-J2
S
S
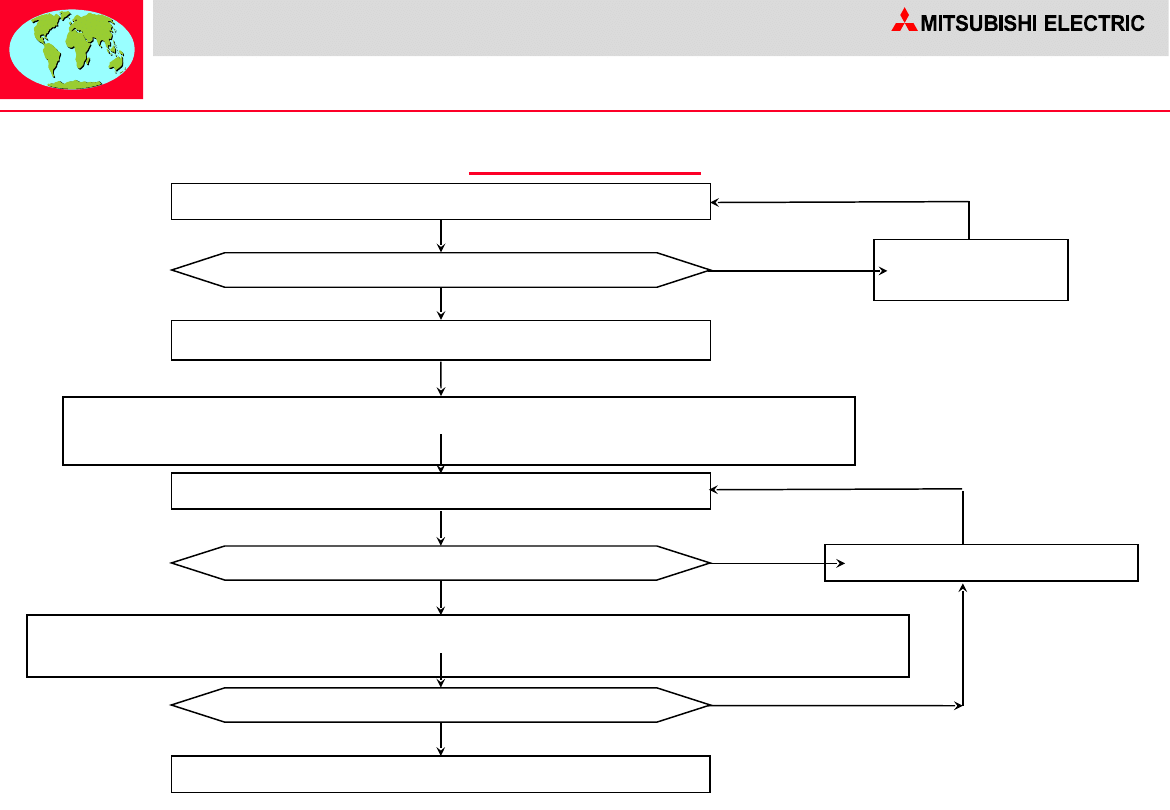
Algorytm
Obliczenie prędkości obrotowej silnika (N)
Prędkość silnika niedopuszczalna ?
Konieczna jest
przekładnia
Tak
Czas rozpędzania/hamowania (t
sa
, t
sd
)
Obliczenie momentu obciążenia (T
L
) momentu bezwładności
obciążenia(J
L
)
Wybór serwosilnika
Nie
T
L
<T
M
i J
L
<J
M
*m?
Konieczny większy silnik
Obliczenie momentu rozpędzania/hamowania (T
Ma/Md
) i momentu
skutecznego (T
rms
)
T
Ma/Md
<T
Mmax
i T
rms
<T
M
?
Wybór odpowiedniego serwowzmacniacza
Nie
Tak
Tak
Nie
Automatyka przemysłowa
Serwonapędy
115
MR-J2
MR-J2
S
S
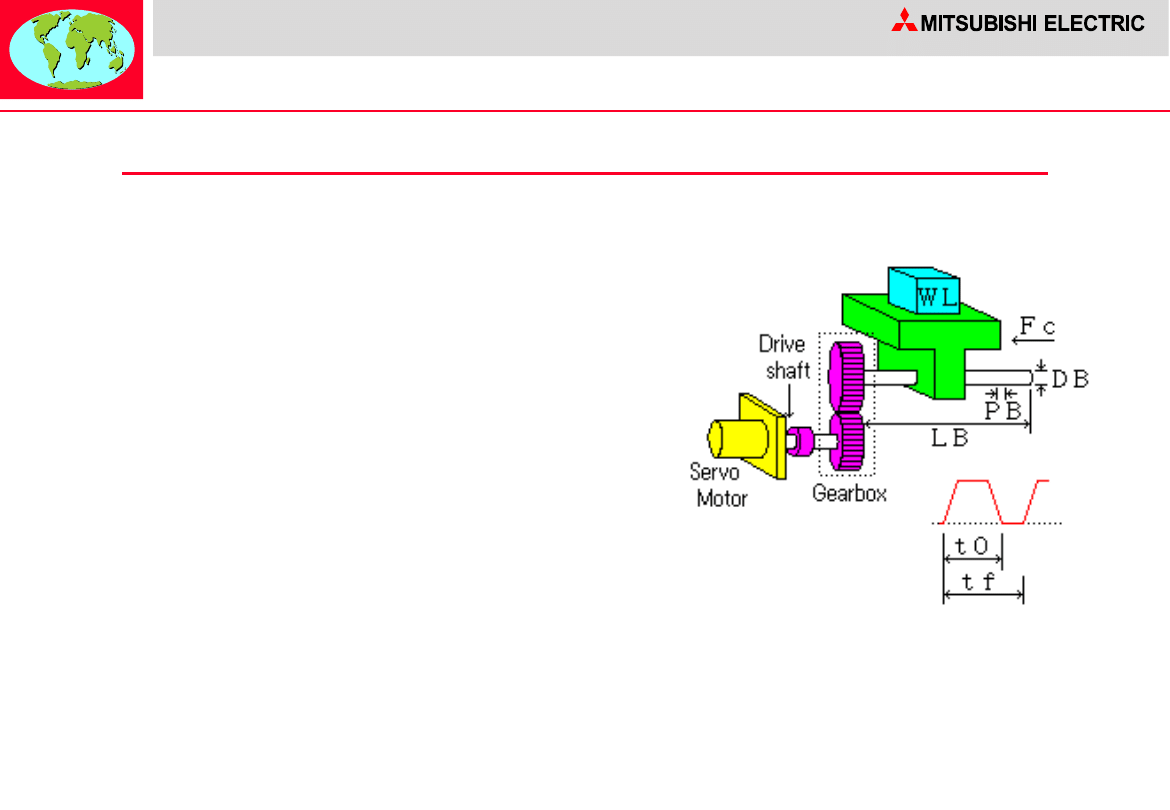
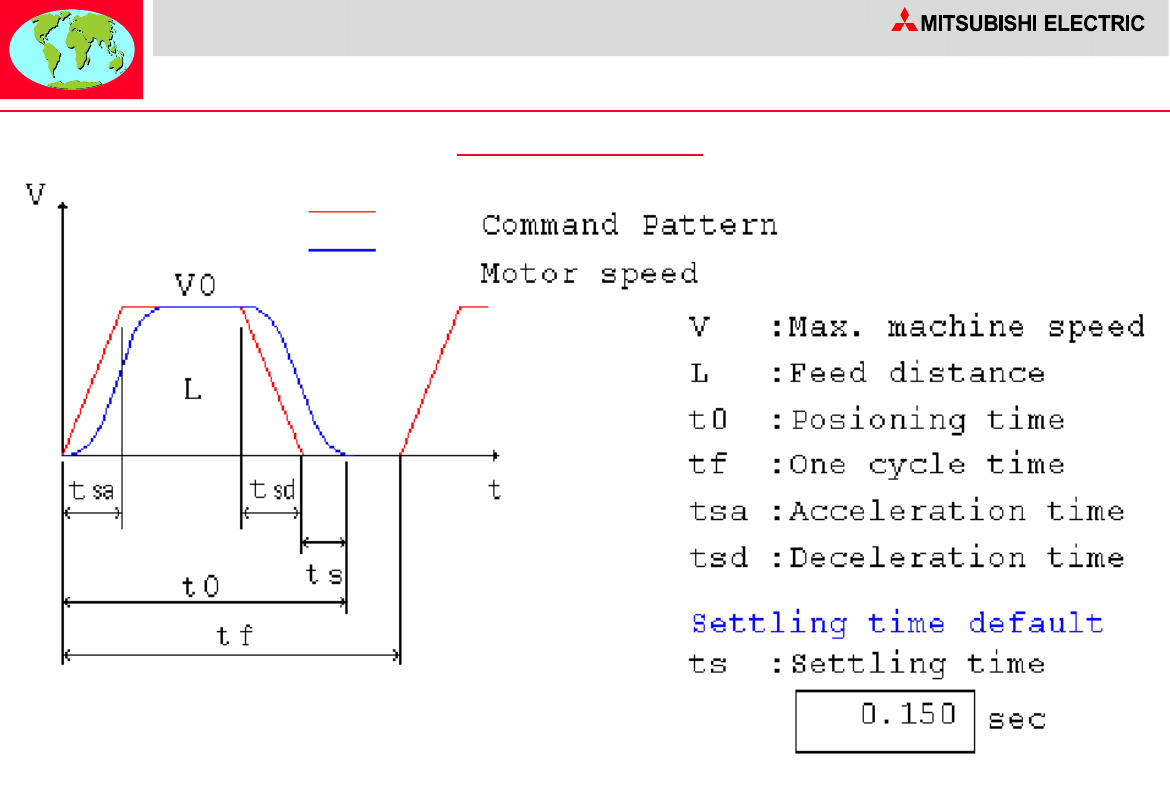
1. Przykład: napęd ze śrubą pociągową
Prędkość ruchu
V = 10000 mm/min
Długość przemieszczenia
L = 400 mm
Czas pozycjonowania
t
0
= 2,6 s
Czas cyklu
t
f
= 3 s
Czas dojścia
t
s
= 0,15 s
Masa ładunku
W = 80 kg
Sprawność napędu
= 0,8
Współczynnik tarcia
= 0,2
Obr. zn. silnika
N = 3000 r/min
Skok śruby pociągowej P
B
= 16 mm
Średnica śruby
D
B
= 20 mm
Długość śruby
L
B
= 500 mm
Automatyka przemysłowa
Serwonapędy
116
MR-J2
MR-J2
S
S
Prędkość obrotowa śruby pociągowej
obr/min
mm
mm/min
N
P
V
N
B
B
B
625
16
10000
Prędkość obrotowa śruby pociągowej (N
B
)
odpowiadająca zadanej prędkości ładunku
• prędkość ładunku (V)
• skok śruby (P
B
)
Automatyka przemysłowa
Serwonapędy
117
MR-J2
MR-J2
S
S
Przełożenie
Wielkość przełożenia (n) obliczamy na podstawie:
• Prędkości serwosilnika (N
M
)
• Prędkości obrotowej śruby (N
B
)
5
8
.
4
625
3000
n
obr/min
obr/min
n
N
N
n
B
M
Automatyka przemysłowa
Serwonapędy
118
MR-J2
MR-J2
S
S
Przemieszczenie na jeden obrót silnika
Przemieszczenie ładunku, przypadające na jeden obrót
serwosilnika (s) obliczamy na podstawie
• skoku śruby pociągowej (P
B
)
• przełożenia (n)
obr
mm
mm
s
n
P
s
B
/
2
,
3
5
1
16
1
Automatyka przemysłowa
Serwonapędy
119
MR-J2
MR-J2
S
S
Prędkość obrotowa silnika
Rzeczywista prędkość obrotowa serwosilnika z przekładnią
(N
R
) będzie obliczana na podstawie
• Wielkości przełożenia (n)
• Skoku śruby pociągowej (P
B
)
• Prędkości liniowej ładunku (V)
obr/min
obr/min
N
mm
mm/min
N
P
V
n
N
R
R
B
R
3125
625
5
16
10000
5
Automatyka przemysłowa
Serwonapędy
120
MR-J2
MR-J2
S
S
Czas rozpędzania / hamowania
Czas rozpędzania (t
sa
) oraz
czas hamowania (t
sd
) będą obliczone na podstawie:
• czasu pozycjonowania (t
0
)
• długości przemieszczenia (L)
• prędkości ładunku (V)
• czasu dojścia (t
s
)
s
s
s
s
t
t
s
mm/min
mm
s
t
t
t
V
L
t
t
t
sd
sa
sd
sa
s
sd
sa
05
,
0
15
,
0
4
,
2
6
,
2
15
,
0
60
10000
400
6
,
2
60
0
Automatyka przemysłowa
Serwonapędy
121
MR-J2
MR-J2
S
S
Cykl pracy
Automatyka przemysłowa
Serwonapędy
122
MR-J2
MR-J2
S
S
Moment obciążenia
Moment obciążenia (T
L
)obliczamy na podstawie:
• masy obciążenia (W)
• współczynnika tarcia (m )
• prędkości ładunku (V)
• prędkości serwosilnika (N)
• sprawności napędu ()
Czym jest moment
Czym jest moment
obciążenia?
obciążenia?
Jest to moment obrotowy,
Jest to moment obrotowy,
potrzebny do wykonania
potrzebny do wykonania
zadanego ruchu obciążenia
zadanego ruchu obciążenia
Automatyka przemysłowa
Serwonapędy
123
MR-J2
MR-J2
S
S
Moment obciążenia
Nm
T
obr/min
mm/min
s
m
kg
T
N
V
g
W
T
g
W
F
gdzie
N
V
F
T
L
L
L
L
10
,
0
3125
10000
10
8
,
0
2
/
81
,
9
80
2
,
0
10
2
,
10
2
3
2
3
3
Automatyka przemysłowa
Serwonapędy
124
MR-J2
MR-J2
S
S
Moment bezwładności obciążenia
Pełny moment bezwładności (J
L
) odpowiada sumie wartości:
• bezwładności ładunku (J
L1
)
• bezwładności śruby pociągowej (J
L2
)
• bezwładności przekładni (J
L3
)
sprowadzonych do wału serwosilnika (tj. uwzględniając
przełożenie)
J
L
= J
L1
+ J
L2
+ J
L3
Czym jest moment bezwładności
Czym jest moment bezwładności
?
?
Jest to moment obrotowy, potrzebny
Jest to moment obrotowy, potrzebny
do rozpędzenia lub zatrzymania
do rozpędzenia lub zatrzymania
obiektu
obiektu
Automatyka przemysłowa
Serwonapędy
125
MR-J2
MR-J2
S
S
Bezwładność ładunku
Moment bezwładności ładunku (J
L1
) obliczamy na podstawie:
• masy ładunku (W)
• przesunięcia na jeden obrót serwosilnika (s)
2
1
2
2
1
2
1
21
,
0
2
32
,
0
80
2
5
1
6
,
1
80
1
,
2
cm
kg
J
cm
kg
cm
kg
J
n
P
s
gdzie
s
W
J
L
L
B
L
Automatyka przemysłowa
Serwonapędy
126
MR-J2
MR-J2
S
S
Bezwładność śruby pociągowej
Moment bezwładności śruby pociągowej (J
L2
) obliczamy na
podstawie:
• długości śruby (L
B
)
• średnicy śruby (D
B
)
• wielkości przełożenia (n)
• masa właściwa stali (
= 0,0078 kg/cm³ )
2
2
2
4
3
2
2
4
2
024
,
0
5
1
2
32
50
0078
,
0
1
32
cm
kg
J
cm
cm
cm
kg
J
n
D
L
J
L
L
B
B
L
Automatyka przemysłowa
Serwonapędy
127
MR-J2
MR-J2
S
S
Bezwładność przekładni
Wielkość momentu bezwładność przekładni (J
L3
)
pobieramy z jej danych katalogowych
Na przykład:
Przekładnia LP 050 z przełożeniem 5:1,
Producent: Alpha
J
L3
= 0,28 kg
cm²
Automatyka przemysłowa
Serwonapędy
128
MR-J2
MR-J2
S
S
Pełny moment obciążenia
Obliczamy pełny moment obciążenia.
Jeżeli nie było to zrobione wcześniej, wartość
należy sprowadzić do wału silnika.
J
L
= J
L1
+ J
L2
+ J
L3
J
L
= 0.21 kg
cm² + 0.024 kg
cm² + 0.28 kg
cm²
J
L
= 0.514 kg
cm
2
Automatyka przemysłowa
Serwonapędy
129
MR-J2
MR-J2
S
S
Tymczasowy wybór silnika
Tymczasowy wybór silnika przeprowadza się z użyciem 2 kryteriów:
1. Moment znamionowy serwosilnika musi być wyższy od momentu
obciążenia.
2. Całkowity moment bezwładności obciążenia nie może przekraczać
podanej w katalogu wielokrotności (np. 30-krotnej) wartości momentu
bezwładności silnika.
Moment
znamiono
wy
Wygra-
łem!
Oh
oh
Moment
obciążeni
a
J
M
J
M
x 30
J
L
Automatyka przemysłowa
Serwonapędy
130
MR-J2
MR-J2
S
S
Tymczasowy wybór silnika
Dla poniższych danych:
J
L
= 0.514 kg
cm
2
T
L
= 0.10 Nm
wybieramy tymczasowo HC-MFS 053 (50 W):
J
M
= 0,019 kg
cm
2
T
M
= 0,16 Nm
Sprawdzamy warunki:
1. T
L
< T
M
0,10 Nm < 0,16 Nm
O.K.
2. J
L
< J
M
x 30
0,514 kg
cm
2
< 0,019 kg
cm
2
x 30
O.K.
Automatyka przemysłowa
Serwonapędy
131
MR-J2
MR-J2
S
S
Moment rozpędzania
Moment napędowy, konieczny podczas rozpędzania (T
Ma
),
jest określony przez:
• Całkowity moment bezwładności (J
L
)
• Moment bezwładności silnika (J
M
)
• Prędkość obrotową silnika (N)
• Moment obciążenia (T
L
)
• czas rozpędzania (t
sa
)
Nm
T
Nm
s
obr/min
cm
kg
cm
kg
T
T
t
N
J
J
T
Ma
Ma
L
sa
M
L
Ma
449
,
0
10
,
0
05
,
0
10
55
,
9
3125
019
,
0
514
,
0
10
55
,
9
4
2
2
4
Automatyka przemysłowa
Serwonapędy
132
MR-J2
MR-J2
S
S
Moment hamowania
Moment napędowy, konieczny podczas hamowania (T
Md
)
jest określony przez:
• Całkowity moment bezwładności (J
L
)
• Moment bezwładności silnika (J
M
)
• Prędkość obrotową silnika (N)
• Moment obciążenia (T
L
)
• Czas hamowania (t
sd
)
Nm
T
Nm
s
obr/min
cm
kg
cm
kg
T
T
t
N
J
J
T
Md
Md
L
sd
M
L
Md
248
,
0
10
,
0
05
,
0
10
55
,
9
3125
019
,
0
514
,
0
10
55
,
9
4
2
2
4
Automatyka przemysłowa
Serwonapędy
133
MR-J2
MR-J2
S
S
Moment rozpędzania/hamowania
Moment napędowy, konieczny podczas rozpędzania i hamowania
musi być niższy, niż maksymalny moment serwosilnika.
Moment podczas rozpędzania: T
Ma
= 0,449 Nm
Moment podczas hamowania: T
Md
= -0,248 Nm
Moment maksymalny silnika HC-MFS053: T
Mmax
= 0,48 Nm
Automatyka przemysłowa
Serwonapędy
134
MR-J2
MR-J2
S
S
Skuteczny (średniokwadratowy) moment
obciążenia
Wartość skuteczna momentu obciążenia (T
rms
) zależy od:
• Momentu obciążenia (T
L
)
• Momentu podczas rozpędzania (T
Ma
)
• Momentu podczas hamowania (T
Md
)
• parametrów czasowych cyklu pracy (t
a
, t
s,
t
f ,
t
f
< 120s)
Nm
Nm
T
t
t
T
t
T
t
T
T
rms
f
sd
Md
c
L
sa
Ma
rms
11
,
0
3
05
,
0
248
,
0
35
,
2
10
,
0
05
,
0
449
,
0
2
2
2
2
2
2
Wartość skuteczna momentu musi być mniejsza, niż znamionowy
moment serwosilnika.
T
rms
< T
M
0,11 Nm < 0,16 Nm
O.K.
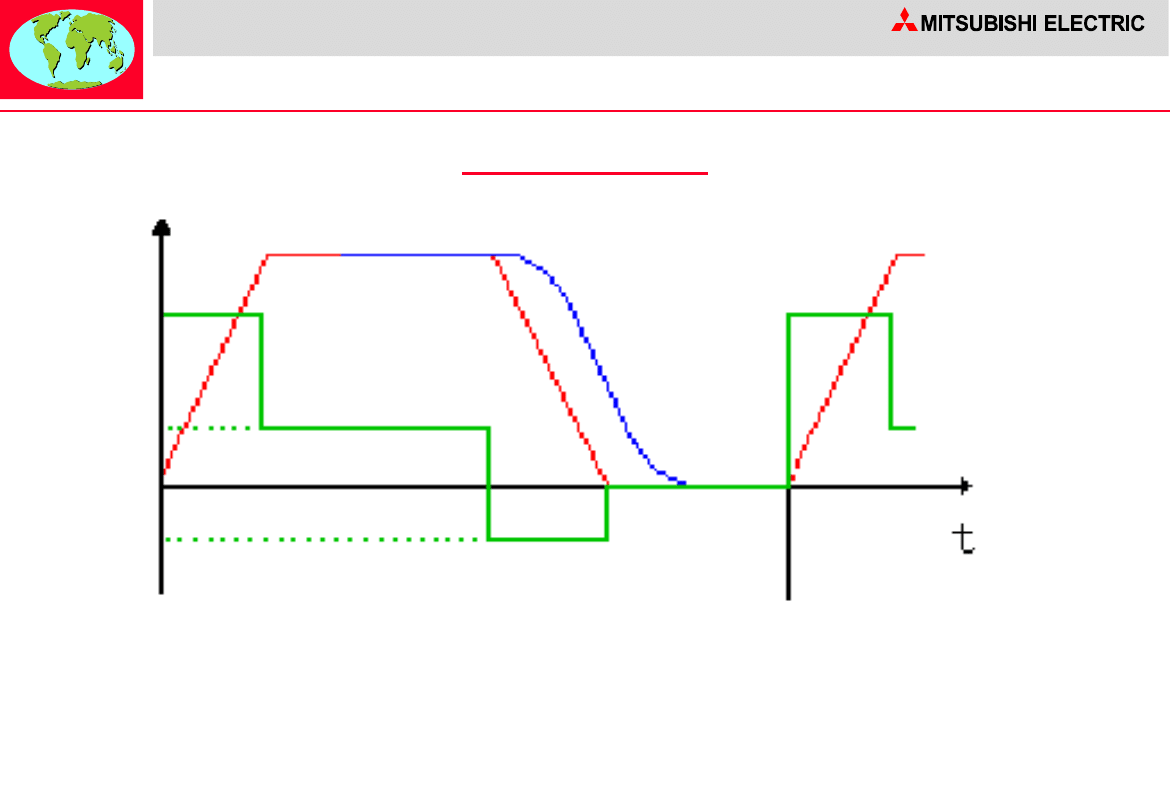
Automatyka przemysłowa
Serwonapędy
135
MR-J2
MR-J2
S
S
Cykl pracy
0.449
T[Nm]
0.10
-0.248
Automatyka przemysłowa
Serwonapędy
136
MR-J2
MR-J2
S
S
Rezultaty wyboru
Wybrano serwosilnik HC-MFS 053 i serwowzmacniacz
MR-J2S-10A przy następujących danych:
Prędkość nominalna silnika 3125 obr/min
Czas rozpedzania/hamowania 0,05 s
Przełożenie przekładni 5:1.
Automatyka przemysłowa
Serwonapędy
137
MR-J2
MR-J2
S
S
MR-J2S-CL
MR-J2S-CL
Programowalny
Programowalny
serwowzmacnia
serwowzmacnia
cz
cz
Automatyka przemysłowa
Serwonapędy
138
MR-J2
MR-J2
S
S
MR-J2S-CL
Łatwy, uproszczony język programowania
Możliwość zapisania 120 kroków programowych
Możliwość jednoczesnego zapamiętania 16
programów, wybieranych do wykonania sygnałem
stykowym lub przez złącze szeregowe
Złącze szeregowe, przełączane programowo jako
RS232 lub RS485 – komunikacja sieciowa max. 32
urządzeń
Program narzędziowy dla Windows
Kompatybilny z urządzeniami podstawowej serii
MR-J2S
Serwonapęd AC z wbudowanym sterownikiem
pozycjonowania
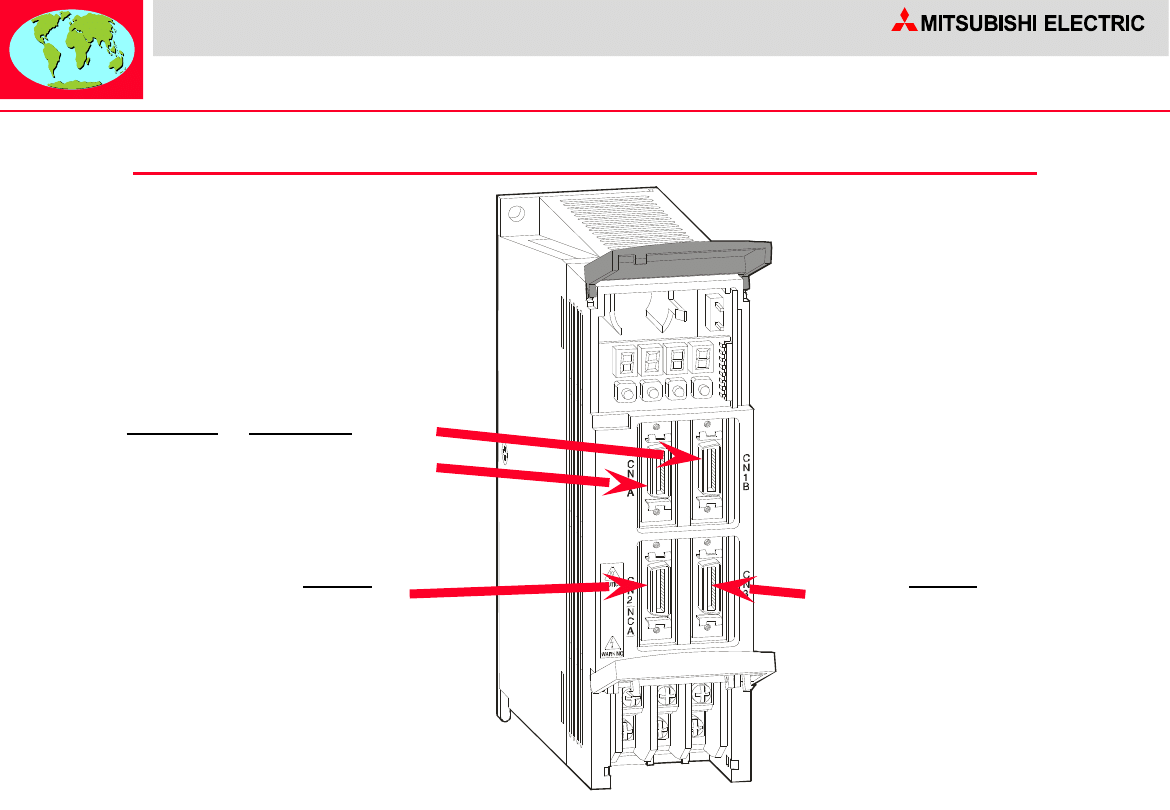
Automatyka przemysłowa
Serwonapędy
139
MR-J2
MR-J2
S
S
Interfejs – zgodny z serią podstawową
Złącza CN1A i CN1B:
Wejścia i wyjścia cyfrowe
Złącze CN2 :
Enkoder
Złącze CN3 :
Port szeregowy
(RS232 / RS485)
Automatyka przemysłowa
Serwonapędy
140
MR-J2
MR-J2
S
S
Wejściowe sygnały cyfrowe 1
EMG
Zatrzymanie awaryjne
SON
Servo ON
RES
Reset
LSP
Łącznik krańcowy ruchu w prawo
LSN
Łącznik krańcowy ruchu w lewo
PI*
Wznowienie po przerwaniu SYNC*
(*=1, 2, 3)
ST1
Start w prawo (Jog/Start)
ST2
Start w lewo (tylko Jog)
Automatyka przemysłowa
Serwonapędy
141
MR-J2
MR-J2
S
S
Wejściowe sygnały cyfrowe 2
MDO
Auto/Manual Select (Wybór ręczne/automat)
DOG
DOG zbliżenia
DI*
Wybór numeru programu (*=0, 1, 2, 3)
OVR
Funkcja Override (wejście analogowe)
TL0
Zewnętrzne ograniczenie momentu (we.analog.)
TL1
Wewnętrzne ograniczenie momentu
PC
Regulacja proporcjonalna (zmiana PI na P)
STP
Tymczasowy Stop/restart
TP1/TP0 Mnożnik ilości impulsów z generatora
Automatyka przemysłowa
Serwonapędy
142
MR-J2
MR-J2
S
S
Wyjściowe sygnały cyfrowe 1
RD
Gotowość (Ready)
ALM
Alarm
PED
Ruch wykonany
ZP
Powrót do punktu zerowego wykonany
POT
W zakresie pozycji zadanej
WNG
Ostrzeżenie
BWNG
Ostrzeżenie baterii
Automatyka przemysłowa
Serwonapędy
143
MR-J2
MR-J2
S
S
Wyjściowe sygnały cyfrowe 2
TLC
Osiągnięte ograniczenie momentu
PUS
Tymczasowy stop
OUT
Programowane wyjście (1, 2, 3)
SOUT
Sygnał oczekiwania SYNC
MBR
Blokada hamulca elektromagnetycznego
DBR
Blokada hamulca dynamicznego
Automatyka przemysłowa
Serwonapędy
144
MR-J2
MR-J2
S
S
Parametry
Parametry ponumerowano od 0 do 90
Parametry wzmocnienia i autotuning – jak w MR-
J2S-A
Parametry wejściowych sygnałów cyfrowych (59
do 63)
Parametr wyjściowych sygnałów cyfrowych (66
do 68)
Parametr określający jednostkę pozycjonowania
(02)
Automatyka przemysłowa
Serwonapędy
145
MR-J2
MR-J2
S
S
Język programowania
Polecenie Nazwa
Zakres
wartości
J ednostka
SPN
Prędkość silnika
0 ~ max. obr/min
STC
Czas rozpędzania/
hamowania
0 ~ 20000 ms
STA
Czas rozpędzania 0 ~ 20000 ms
STB
Czas hamowania 0 ~ 20000 ms
MOV
MOVI
Polecenie
przemieszczenia
-999999 ~
999999
x10
STM
m
MOVA
MOVIA
Kontynuacja
przemieszczenia
-999999 ~
999999
x10
STM
m
Automatyka przemysłowa
Serwonapędy
146
MR-J2
MR-J2
S
S
Język programowania
Polecenie Nazwa
Zakres
wartości
J ednostka
SYNC
Oczekiwanie na stan
ON zewn. sygnału
1 ~ 3
OUTON
Wyjście ON
1 ~ 3
OUTOFF Wyjście OFF
1 ~ 3
TIM
Czas postoju
0 ~ 2000 X10 ms
TRIP
TRIPI
Punkt dojścia
-999999 ~
999999
x10
STM
m
COUNT
Licznik zewn.
impulsów
-999999 ~
999999
impulsów
Automatyka przemysłowa
Serwonapędy
147
MR-J2
MR-J2
S
S
Język programowania
Polecenie Nazwa
Zakres
wartości
J ednostka
ZRT
Powrót do punktu
zerowego
STOP
Koniec programu
TIMES
FOR/NEXT
Powtórzenie
(pętla)
0,
1…10000
razy (0 =
bez ogr.)
Uwaga: Parametr 1 :
X
STM -
mnożnik
0: 1
wartości pozycji
1: 10
zadanej w
2: 100
programie
3: 1000
Automatyka przemysłowa
Serwonapędy
148
MR-J2
MR-J2
S
S
Polecenie „MOV“
SPN(1000)Prędkość
1000 [obr/min]
STA(200) Czas rozpędzania
200 [msec]
STB(300) Czas hamowania
300 [msec]
MOV(1000)
Przemieszczenie
1000 [x10
STM
m]
TIM(10)
Czas postoju
100 [msec]
MOV(2000)
Przemieszczenie
2000 [x10
STM
m]
STOP
Koniec programu
v
t
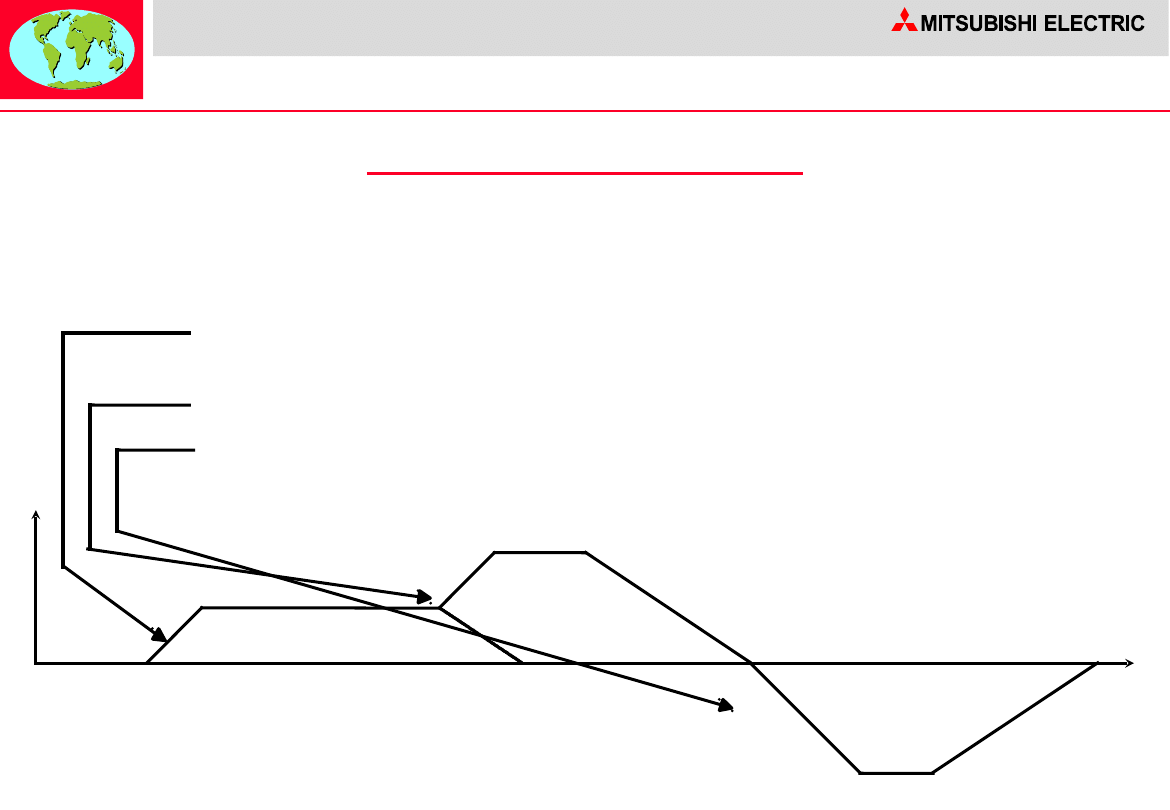
Automatyka przemysłowa
Serwonapędy
149
MR-J2
MR-J2
S
S
Polecenie „MOVA“
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [msec]
STB(300) Czas hamowania
300 [msec]
MOV(500) Przemieszczenie
500 [x10
STM
m]
SPN(1000)Prędkość
1000 [obr/min]
MOVA(1000)
Przemieszczenie kont.
1000 [x10
STM
m]
MOVA(0) Przemieszczenie kont.
0 [x10
STM
m]
STOP
Koniec programu
v
t
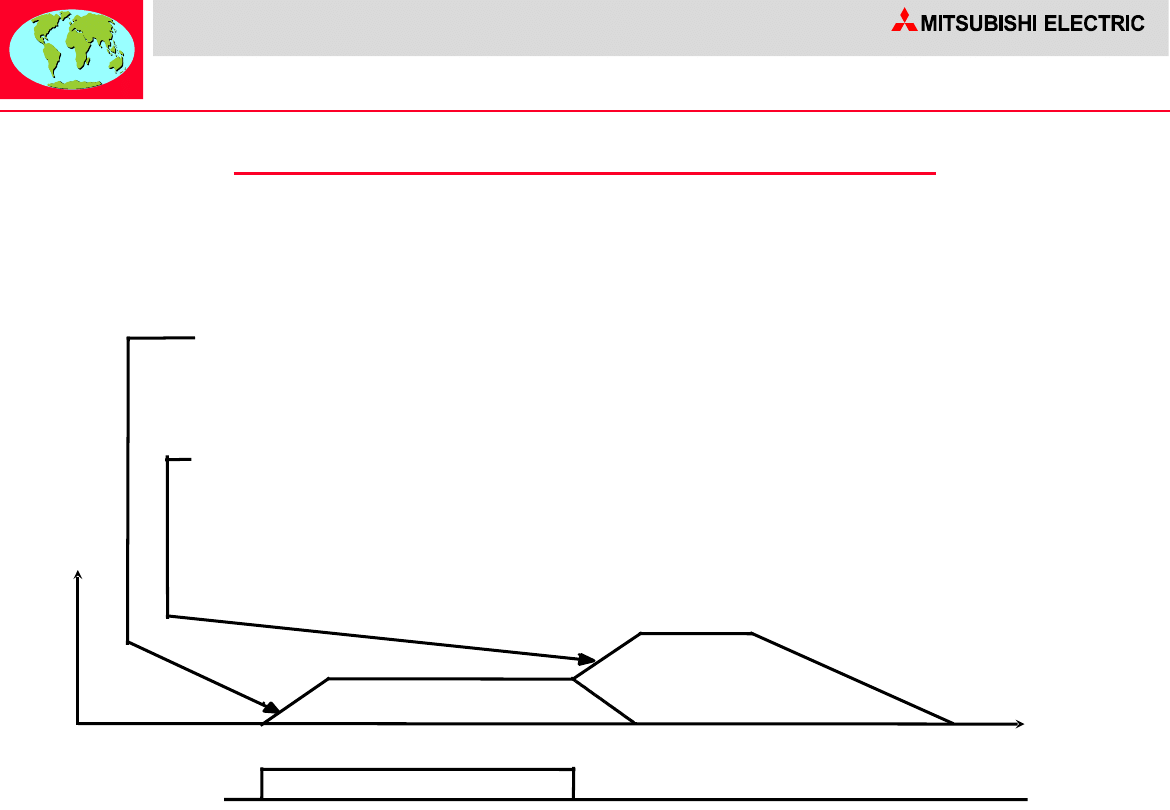
Automatyka przemysłowa
Serwonapędy
150
MR-J2
MR-J2
S
S
Polecenie „OUTON / OUTOFF“
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [msec]
STB(300) Czas hamowania
300 [msec]
MOV(500) Przemieszczenie
500 [x10
STM
m]
OUTON(1) Wyjście 1 ON
SPN(1000)Prędkość
1000 [obr/min]
MOVA(1000)
Przemieszczenie
1000 [x10
STM
m]
OUTOF(1) Wyjście 1 OFF
STOP
Koniec programu
Wyjście 1
v
t
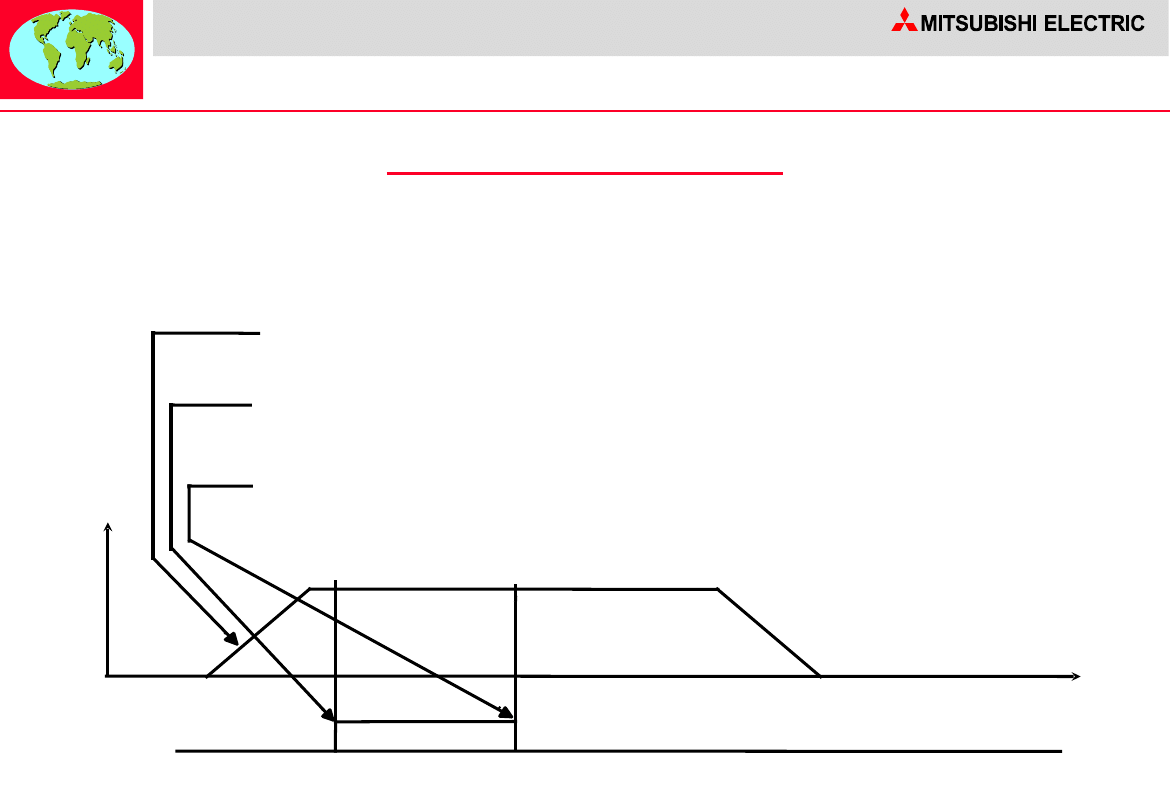
Automatyka przemysłowa
Serwonapędy
151
MR-J2
MR-J2
S
S
Polecenie „TRIP“
Wyjście 1
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [msec]
STB(300) Czas hamowania
300 [msec]
MOV(1000)
Przemieszczenie
1000 [x10
STM
m]
TRIP(300) Punkt dojścia
300 [x10
STM
m]
OUTON(1) Wyjście 1 ON
TRIP(500) Punkt dojścia
500 [x10
STM
m]
OUTOF(1) Wyjście 1 OFF
STOP
Koniec programu
300
500
v
t
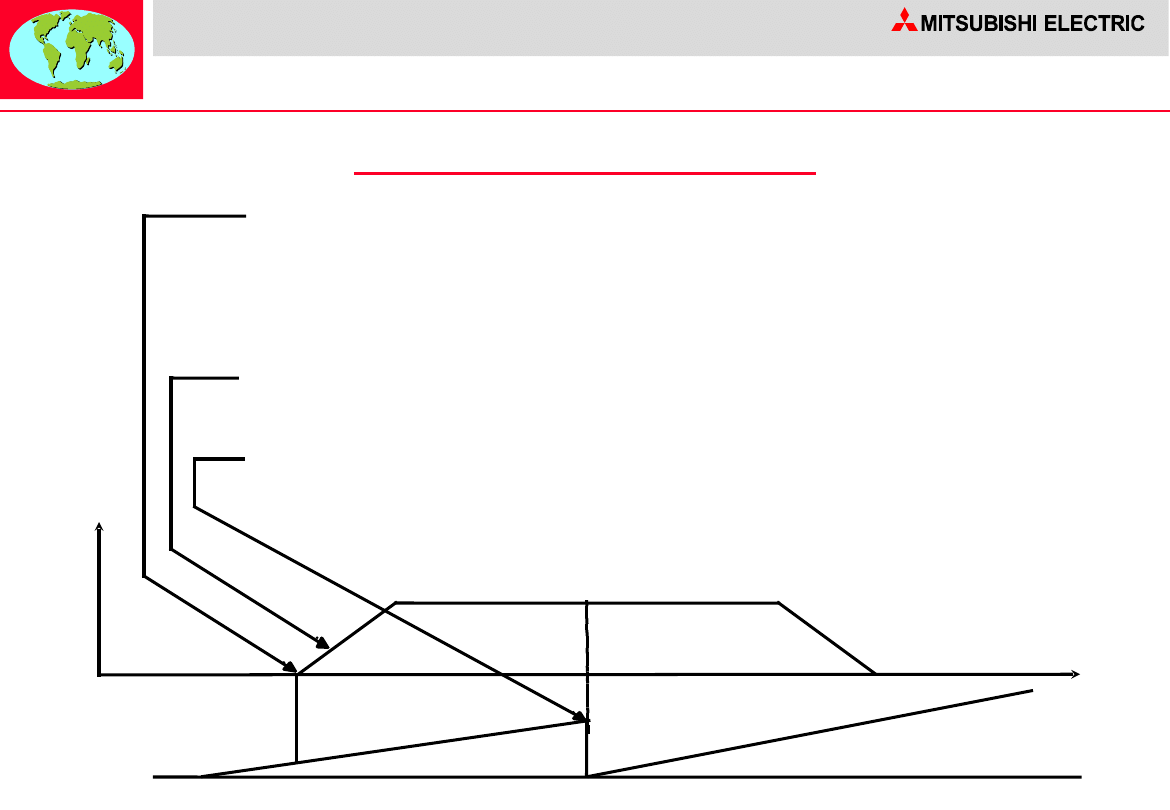
Automatyka przemysłowa
Serwonapędy
152
MR-J2
MR-J2
S
S
Polecenie „COUNT“
COUNT(500)
Ustawienie licznika 500 [Pulse]
SPN(500) Prędkość
500 [obr/min]
STA(200) Czas rozpędzania
200 [msec]
STB(300) Czas hamowania
300 [msec]
MOV(1000)
Przemieszczenie
1000 [x10
STM
m]
TRIP(700) Punkt dojścia
700 [x10
STM
m]
COUNT(0) Zerowanie licznika 0 [Pulse]
STOP
Koniec programu
Counter
500
700
v
t
Automatyka przemysłowa
Serwonapędy
153
MR-J2
MR-J2
S
S
Adresowanie pośrednie
Instrukcje SPN, STA, STB, STC, MOV, TIM i TIMES
mogą być używane z adresem pośrednim.
Dostępne rejestry: R1 - R4, D1 - D4.
Rejestry mogą być przechowywane w EEPROM.
Przy zatrzymanym silniku, wartości tych rejestrów mogą
być modyfikowane przez port szeregowy.
Przykład:
SPN(D1)
D1=1000
STC(D2)
D2=200
MOV(R1)
R1=1000
TIM(10)
MOV(R2)
R2=2000
STOP
Automatyka przemysłowa
Serwonapędy
154
MR-J2
MR-J2
S
S
Ważne parametry - tryb regulacji położenia
Parametr 0
Wybór opcji opornika zewnętrznego
Parametr 1
Automatyczne dostrajanie (autotuning)
Parametr 2 i 3
Dobór elektronicznej przekładni
Parametr 5
Określenie szerokości strefy „pozycjonowanie wykonane”
Parametr 7
Wybór typu ciągu impulsów oraz typu logiki (NPN lub PNP)
Parametr 9
Ustawienia funkcje ograniczenia momentu w procentach
Pozostałe parametry służą skonfigurowaniu binarnych
sygnałów we/wy
MR-C
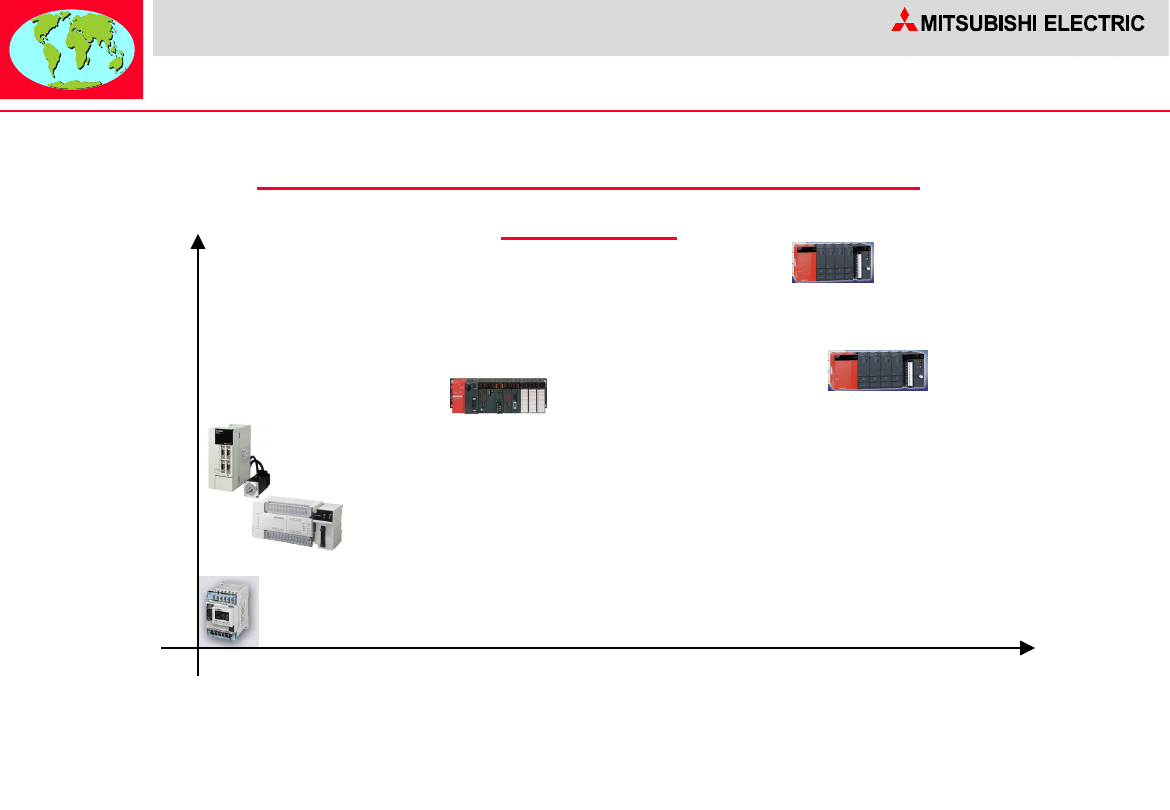
Automatyka przemysłowa
Serwonapędy
155
MR-J2
MR-J2
S
S
Sterowniki ruchu Mitsubishi
Electric
Koszt
inwestycyjny
Możliwości
FX2
N
FX1
N
FX1
S
FX2N-10/20GM
FX1N/FX2N+FX2N-1PG/10PG
FX1N/FX2N + FX2N-10/20GM
MR-J2S-CL+MAC-E100
AnS+A1SD70/D75
Qn+QD70-QD75CV
Qn + Q motion controller
A171/2/3 motion controller
System 1 lub 2
osie niezależne
System powyżej 2-uch osi
Interpolacja pomiędzy
dwiema osiami
System powyżej 2-uch osi
Interpolacja pomiędzy
trzema osiami
System 2-uch do 196-u osi Interpolacja
pomiędzy wszystkimi osiami.
Możliwość stworzenia osi wirtualnych.
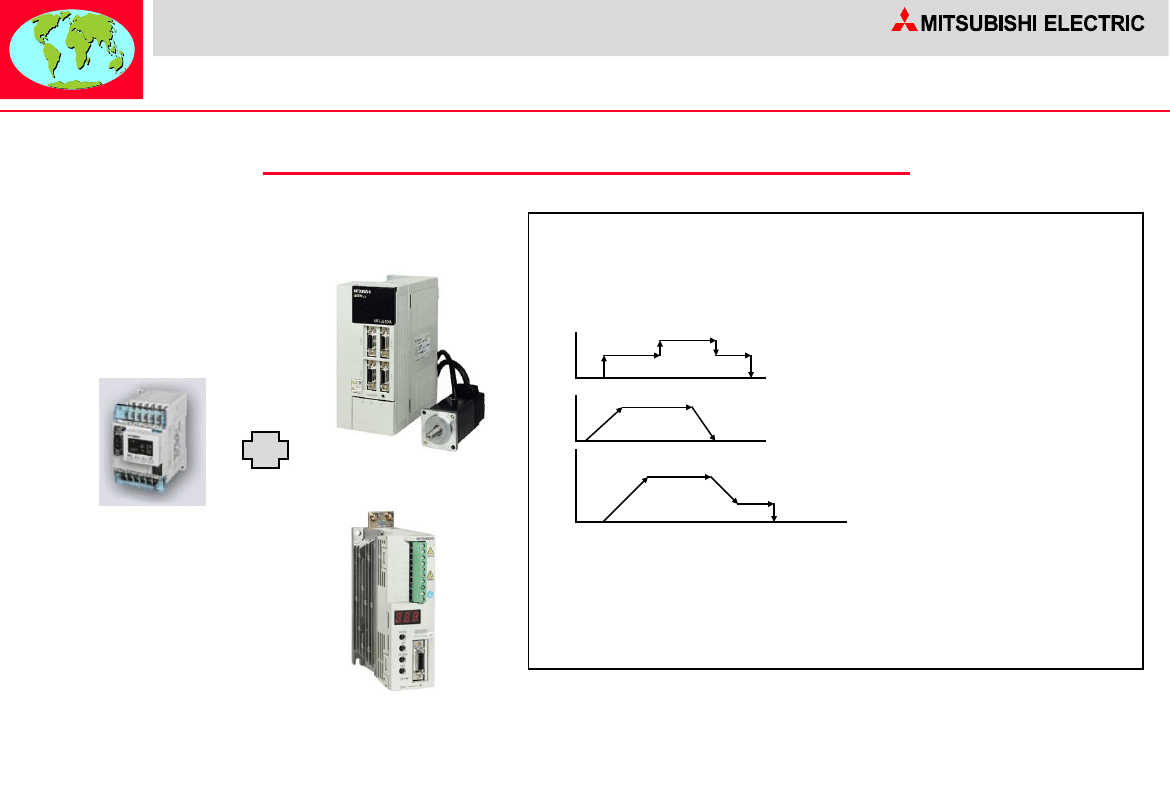
Automatyka przemysłowa
Serwonapędy
156
MR-J2
MR-J2
S
S
FX1S/FX1N + MR-C/MR-J2S-
A
Prosty układ pozycjonowania
Do 2-ch niezależnych osi sterowanych przez ciąg impulsów
Możliwość trzech trybów programowania
Bez możliwości interpolacji.
Możliwość stworzenia systemu absolutnego.
Możliwość koordynacji przez sterownik
Funkcje ABS, PLSV, DRVA, ZRN, DRVI
Automatyka przemysłowa
Serwonapędy
157
MR-J2
MR-J2
S
S
FX1N/FX2N + FX2N-1PG/10PG + MR-C/MR-
J2S-A
Standardowe układy pozycjonowania
Do 8-u niezależnych osi sterowanych przez ciąg impulsów
Trzy sposoby powrotu do punktu bazowego
Nie jest możliwa dynamiczna zmiana prędkości
Bez możliwości interpolacji.
Możliwość stworzenia systemu
Możliwa jest koordynacja przez sterownik
Pamięć buforowa modułu obsługiwana za pomocą
instrukcji programowych FROM - TO
Dostępne są bloki funkcyjne w Melsec Medoc Plus
Zintegrowany w module procesor steruje pętlą ruchu
Automatyka przemysłowa
Serwonapędy
158
MR-J2
MR-J2
S
S
FX1N/FX2N + FX2N-10/20GM + MR-C/MR-
J2S-A
Zaawansowane sterowanie osiami
Do 16-u niezależnych osi sterowanych poprzez
ciąg impulsów lub 8 par po dwie osie
Różne sposoby powrotu do punkt bazowego
Dynamiczna zmiana prędkości
Interpolacja pomiędzy dwoma osiami (20GM).
Możliwość stworzenia systemu absolutnego.
Możliwość pracy bez sterownika PLC
Możliwość koordynacji pracy modułów przez PLC
Pamięć buforowa modułu obsługiwana za pomocą
instrukcji programowych FROM - TO
Dostępne są bloki funkcyjne w Melsec Medoc Plus
Zintegrowany w module procesor steruje pętlą
ruchu i interpolacją
Graficzne oprogramowanie umożliwia szybką obsługę
ustawień systemu sterowania ruchem
10/
20
GM
Automatyka przemysłowa
Serwonapędy
159
MR-J2
MR-J2
S
S
AnS/Qn +
A1SD75/QD75
Zawansowane sterowanie osiami
Możliwość instalacji dowolnej ilości kart, z których
każda może obsługiwać do trzech interpolowanych osi
Sterowanie przez napęd liniowy lub za pomocą
ciągu impulsów
Interpolacja liniowa oraz kołowa
Różne sposoby powrotu do punktu bazowego
Możliwość dynamicznej zmiany prędkości
Możliwość stworzenia systemu absolutnego.
Możliwość koordynacji pracy modułów przez PLC
Pamięć buforowa modułu obsługiwana za pomocą
instrukcji programowych FROM - TO
Zintegrowany w module procesor steruje pętlą
ruchu i interpolacją
Graficzne oprogramowanie umożliwia szybką obsługę
ustawień systemu sterowania ruchem
Automatyka przemysłowa
Serwonapędy
160
MR-J2
MR-J2
S
S
A172/Q172 - Sterownik ruchu
Bardzo zawansowane sterowanie osiami
Możliwość interpolacji do 96 osi
Magistrala pomiędzy osiami oraz sterownikiem
Możliwość integracji wirtualnej osi
Różne sposoby powrotu do punktu bazowego
Możliwa dynamiczna zmiana prędkości
Standardowo wbudowany system absolutny
Pełna integracja ze sterownikiem PLC
Specjalne kody do sterowania osiami
Dwa procesory zainstalowane w module sterującym pętlą
ruchu i interpolacją
Graficzne oprogramowanie umożliwia szybką obsługę
ustawień systemu sterowania ruchem
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
- Slide 79
- Slide 80
- Slide 81
- Slide 82
- Slide 83
- Slide 84
- Slide 85
- Slide 86
- Slide 87
- Slide 88
- Slide 89
- Slide 90
- Slide 91
- Slide 92
- Slide 93
- Slide 94
- Slide 95
- Slide 96
- Slide 97
- Slide 98
- Slide 99
- Slide 100
- Slide 101
- Slide 102
- Slide 103
- Slide 104
- Slide 105
- Slide 106
- Slide 107
- Slide 108
- Slide 109
- Slide 110
- Slide 111
- Slide 112
- Slide 113
- Slide 114
- Slide 115
- Slide 116
- Slide 117
- Slide 118
- Slide 119
- Slide 120
- Slide 121
- Slide 122
- Slide 123
- Slide 124
- Slide 125
- Slide 126
- Slide 127
- Slide 128
- Slide 129
- Slide 130
- Slide 131
- Slide 132
- Slide 133
- Slide 134
- Slide 135
- Slide 136
- Slide 137
- Slide 138
- Slide 139
- Slide 140
- Slide 141
- Slide 142
- Slide 143
- Slide 144
- Slide 145
- Slide 146
- Slide 147
- Slide 148
- Slide 149
- Slide 150
- Slide 151
- Slide 152
- Slide 153
- Slide 154
- Slide 155
- Slide 156
- Slide 157
- Slide 158
- Slide 159
- Slide 160
Wyszukiwarka
Podobne podstrony:
mzm1 - etap wojewodzki - poziom podstawowy 2003, Matematyka
Podstawy bezpiecznikowe NU (2003)
1 SPHL 2003, Obecnie stosowany system, którego podstawy zostały opublikowane przez Mroczkiewicza i T
KONSPEKT Podstawy rachunkowosci 2003 FiB 11
ms project 2003 standard pl kurs podstawowy IQDHSPJSDUBKDAM6EQD4USTIVZT4G2YBZVI66GQ
2003 probna matura styczen 2003 Chemia podstawowa arkusz1 id 60 (2)
Podstawy Rejestru Windows 2000 XP 2003 część I
Ściągi z fizyki-2003 r, Soczewki-podstawowe informacje
wykladypp 2003 abhp, wisisz, wydzial informatyki, studia zaoczne inzynierskie, podstawy programowani
2003 próbna matura styczeń 2003, Chemia podstawowa arkusz1-odpowiedzi
grudzien 2003 podstawa
Estry metylowe podstawionych kwasów benzoesowych, technologia chemiczna, chemia organiczna 2003,2004
PODSTAWOWE OBJAWY I ALGORYTMY DIAGNOSTYCZNE 97 2003
Ściągi z fizyki-2003 r, Podstawowe pojęcia
200
więcej podobnych podstron