
UKŁADY NAPĘDOWE 2

1.5. Układy napędowe prądu stałego
W napędach głównych obrabiarek sterowanych numerycznie stosowane
są:
•
bocznikowe komutatorowe silniki prądu stałego,
a w napędach ruchu posuwowego silniki:
komutatorowe obcowzbudne ze wzbudzeniem od magnesów
trwałych,
bezszczotkowe prądu stałego,
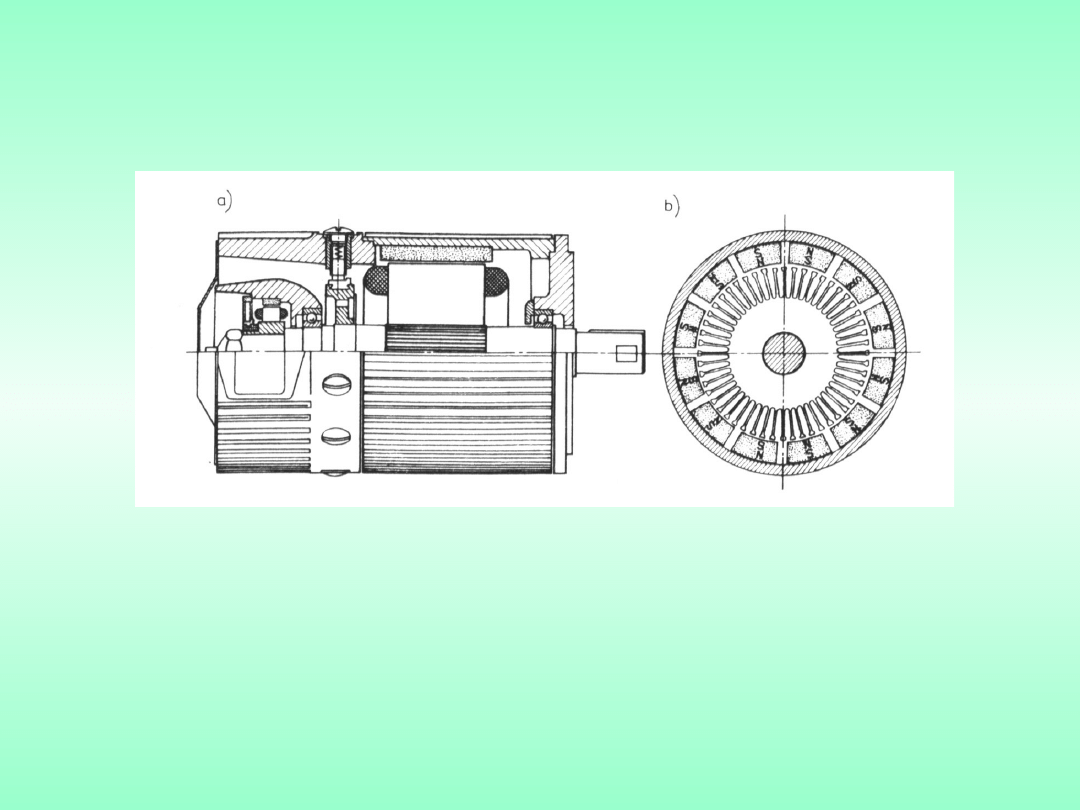
1. 5.1. Komutatorowe silniki prądu stałego
Rys. 1. Komutatorowy silnik prądu stałego z magnesami trwałymi: a)
przekrój wzdłużny, b) stojan z magnesami w przekroju poprzecznym
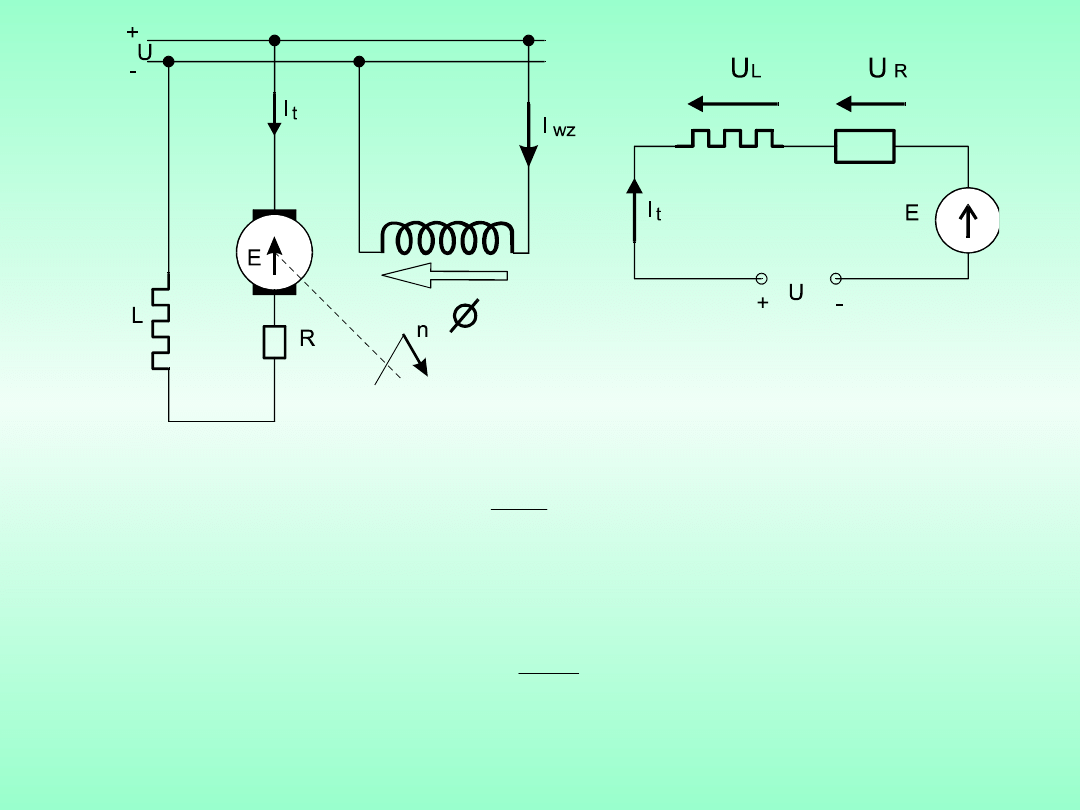
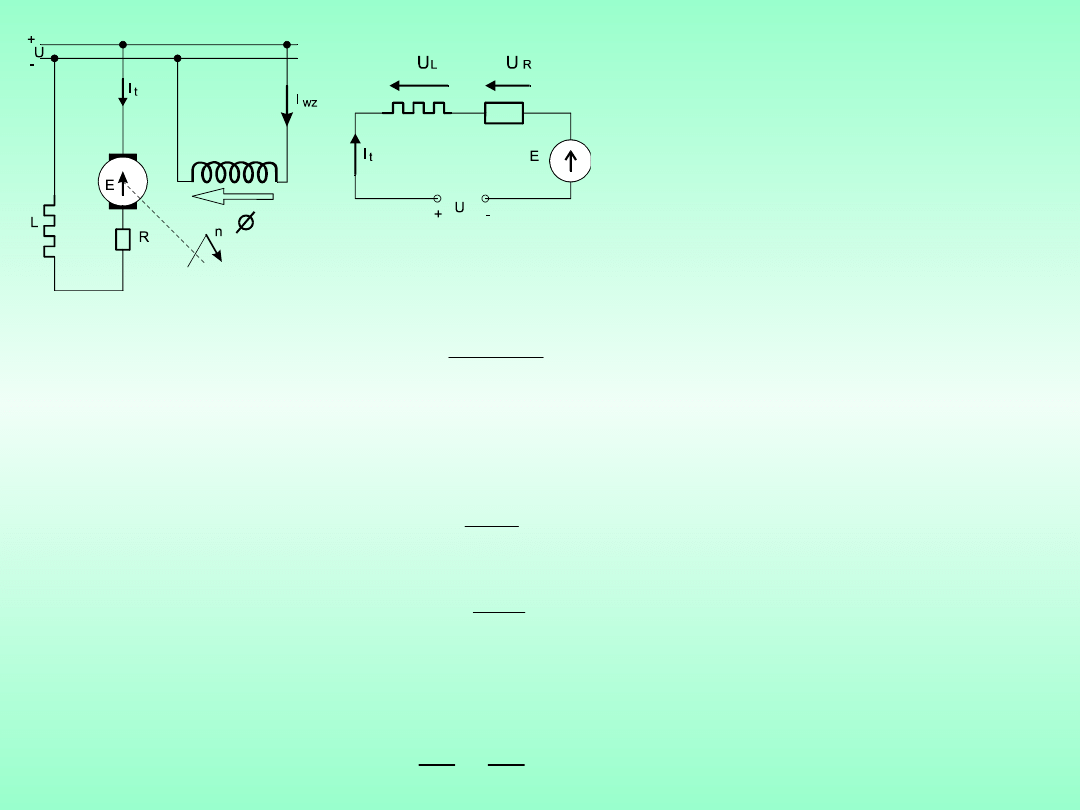
Rys. 7.10. Zasada działania silnika prądu stałego bocznikowego
a
60
n
p
z
2
E
(1.1)
gdzie: p - liczba par biegunów stojana, - strumień magnetyczny
przypadający na parę biegunów stojana, z - liczba zwojów wirnika,
a - liczba par gałęzi równoległych uzwojeń wirnika, n - prędkość
obrotowa wirnika.
a
60
p
z
2
k
E
(1.2)
(1.3)
E = k
E
n
E
t
t
k
I
R
U
n
gdzie: U - napięcie zasilające wirnik, R
t
- rezystancja w obwodzie
wirnika, I
t
- prąd w obwodzie wirnika.
E = U – R
t
I
t
(1.4)
(1.5)
stąd
t
I
a
p
z
M
a
p
z
k
M
(1.6)
(1.7)
t
M
I
k
M
(1.8)
(1.9)
55
,
9
30
k
k
E
M
M
k
k
R
k
U
n
2
M
E
t
E
M
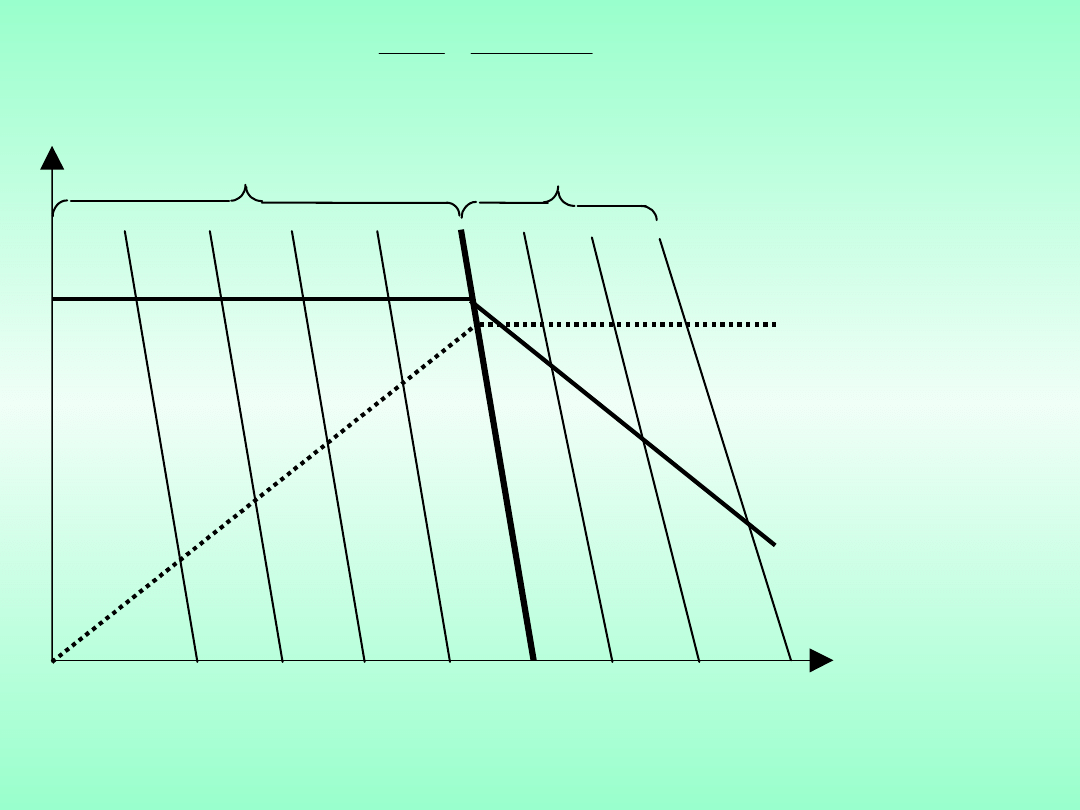
N
M
dop
= f (n)
N
dop
= f (n)
N
dop
= const
n
M
dop
= const
U<U
zn
U
zn
zn
<
zn
(1.10
)
Rys. 7.11. Charakterystyki mechaniczne silnika prądu stałego
const
I
k
M
max
t
M
dop
(1.11
)
const
I
U
N
max
t
t
dop
(1.12
)
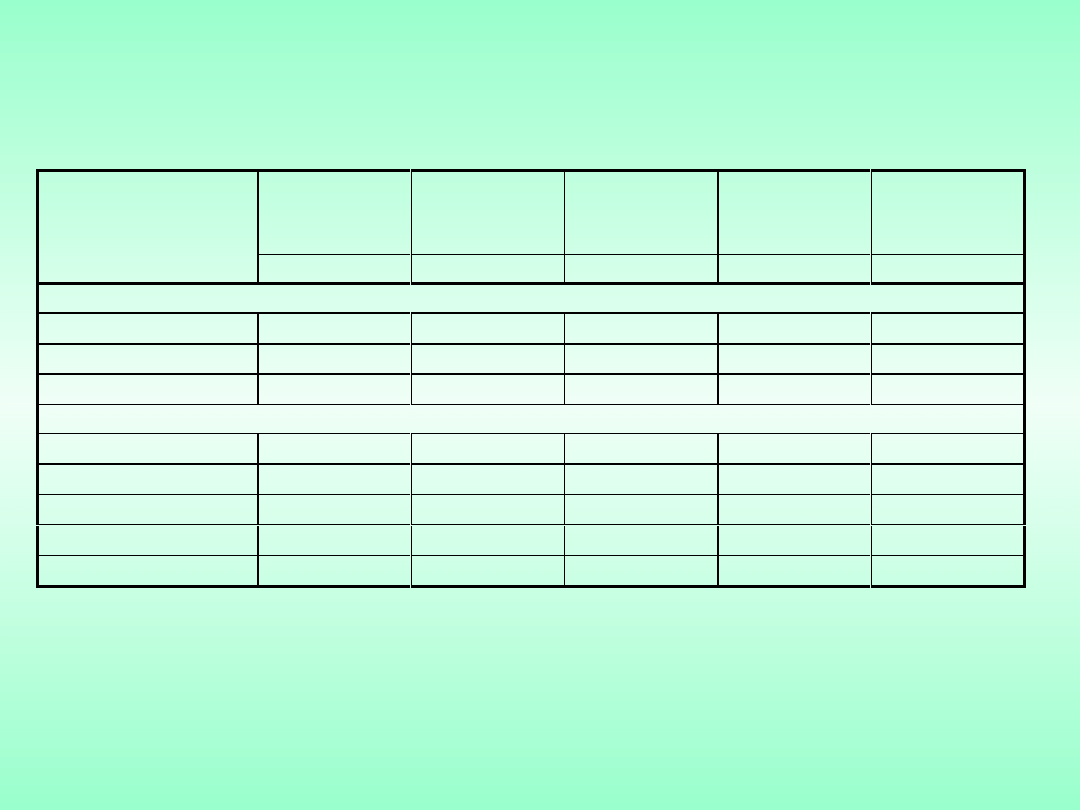
Typ:
Znamionowa
prędkość
obrotwa
Znamionowy
moment
obrotowy
Moc
znamionowa
Zakres
zmian
prędkości
Prąd
znamionowy
[1/min]
[Nm]
[kW]
[1/min]
[A]
Napięcie zasilania 300V Napięcie wzbudzenia 310V
1GG5 100-0FG4
3720
4,6
1,8
504100
7,4
1GG5 108-0EH4
3200
24,5
8,2
503570
32
1GG5 116-0GL4
2800
47,6
14
503140
53
Napięcie zasilania 460V Napięcie wzbudzenia 310V
1GG5 100-0EE4
3100
6,5
2,1
507000
5,7
1GG5 104-0EF4
3200
13,7
4,6
504800
12
1GG5 116-0GH4
2900
47,9
14,5
505800
36
1GG5 136-0GJ 4
3300
109
37,5
503900
89
1GG5 164-0GL4
3300
173
59
503450
140
Tab. 7.1. Parametry obcowzbudnych silników prądu stałego firmy SIEMENS
do napędu głównego
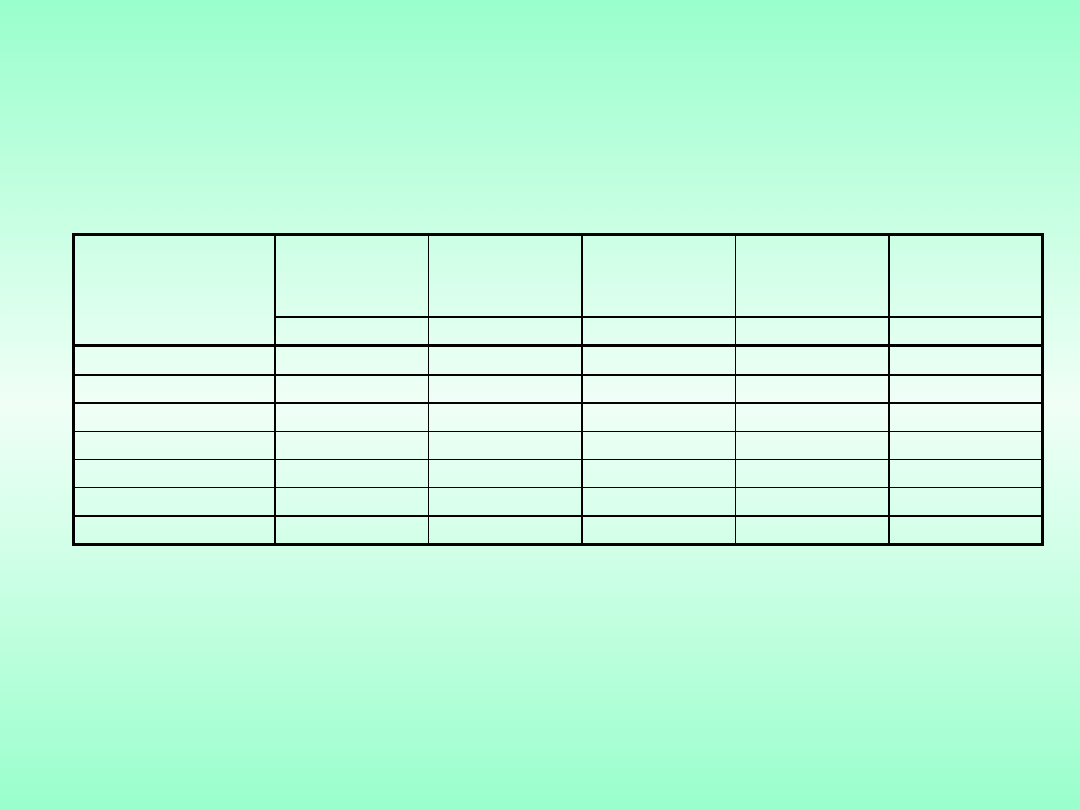
Tab. 7.2. Parametry serwonapędowych obcowzbudnych silników prądu
stałego firmy PORTER
Typ:
Maksymalna
prędkość
obrotowa
Znamionowy
moment
obrotowy
Napięcie
zasilania
Moment
bezwładnośc
i
Przeciążenie
chwilowe
momentem
[1/min]
[Nm]
[V]
[kgcm
2
]
[Nm]
DF4-5680
3000
15
110
120
60
PF4-5680
3000
30
110
219
118
ZF4-5680
3000
29
120
324
190
ZNF4-5680
3000
27
120
449
257
MF3-2100
1900
95
200
1030
202
ZGF3-2100
2400
161
200
1770
324
ABF3-2100
2500
225
200
2470
500
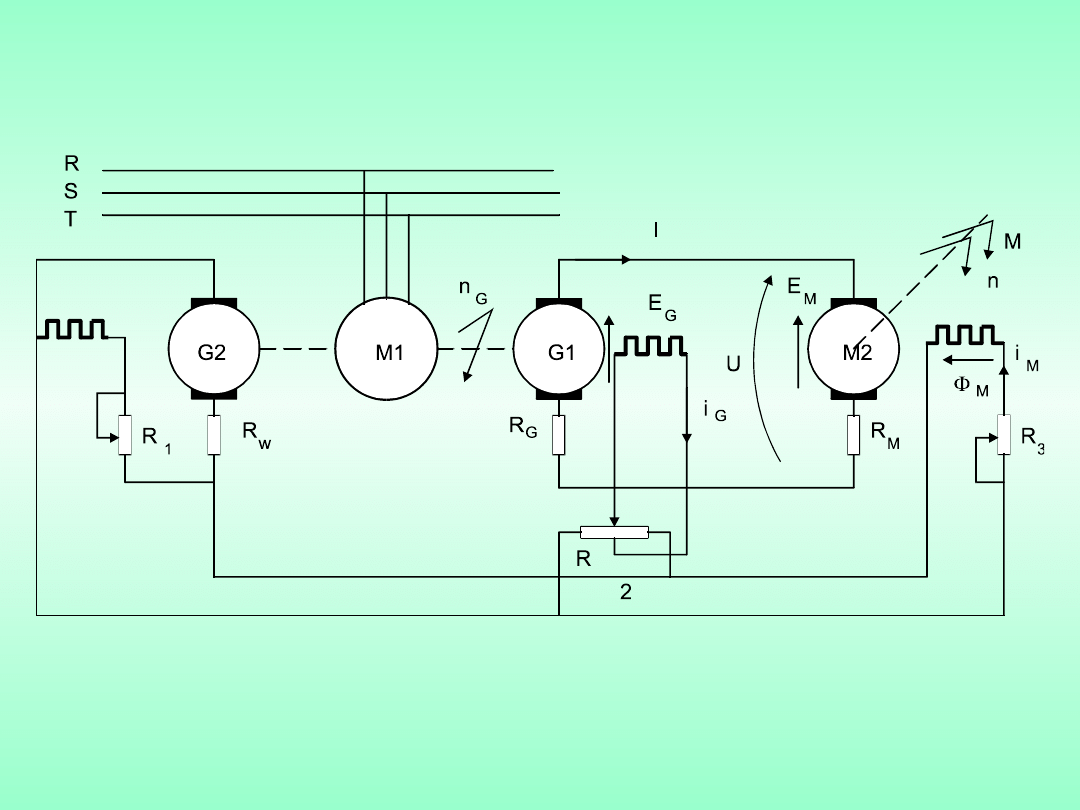
1.5.2. Układ napędowy Ward-Leonarda
Rys. 7.12. Układ napędowy Ward-Leonarda: M2 - silnik prądu
stałego, G1 - prądnica główna zasilająca obwód wirnika
silnika M2, G2 - prądnica (wzbudnica) zasilająca obwód
wzbudzenia silnika M1 i prądnicy G1, M1 - silnik
asynchroniczny napędzający prądnicę G1 i wzbudnicę G2
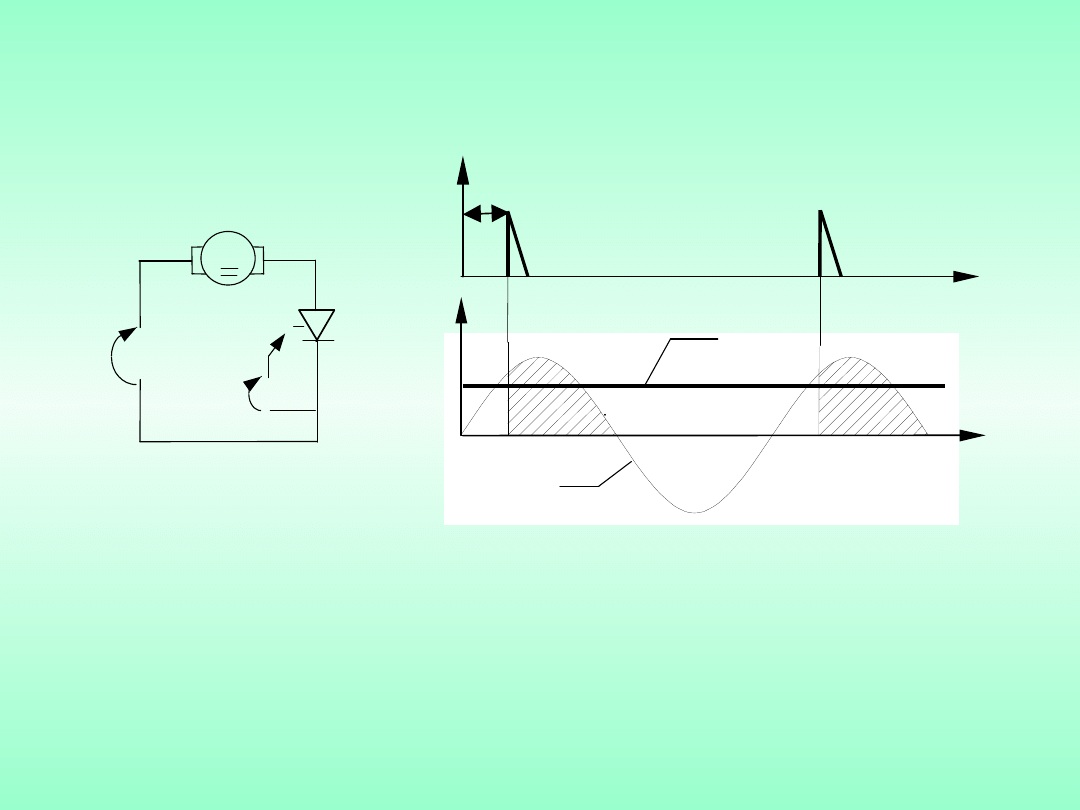
1.5.3. Tyrystorowe układy napędowe
Rys. 7.13. Zasada działania tyrystorowego zasilania silnika
prądu stałego
M
~U
z
U
s
I
a
z
t
U
s
U
U
sk
t
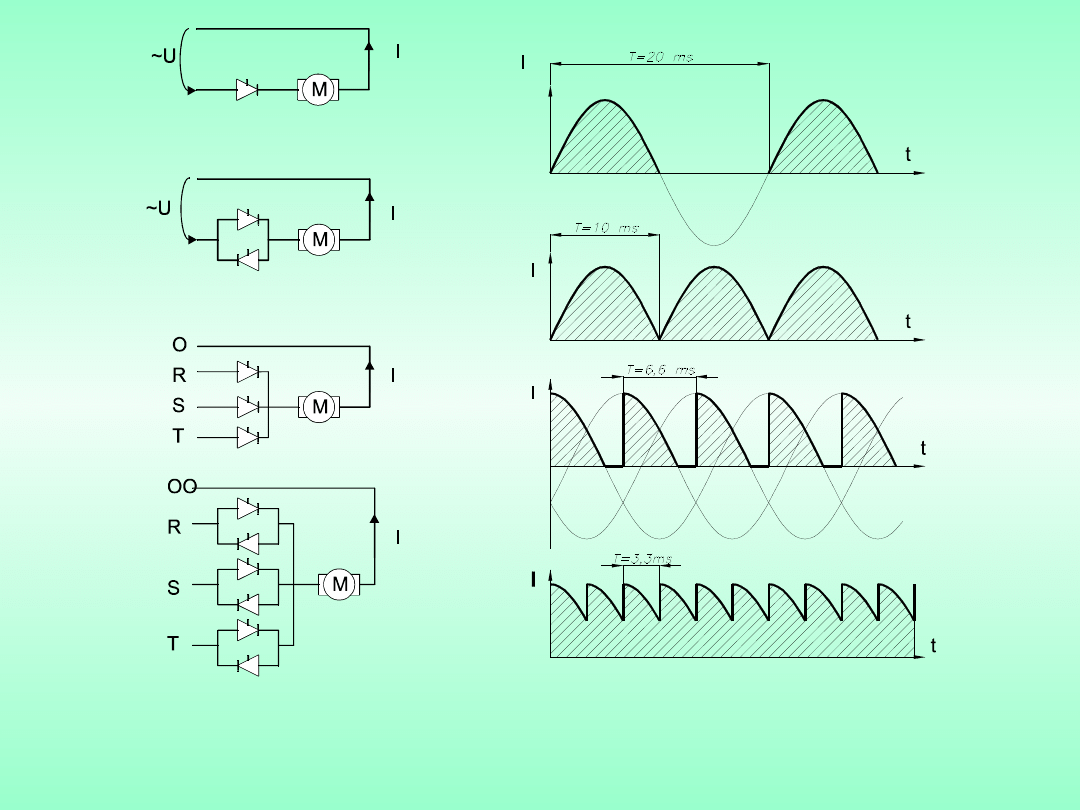
Rys. 7.14. Układy tyrystorowe jedno-, dwu-, trzy- i sześcio-
pulsowe
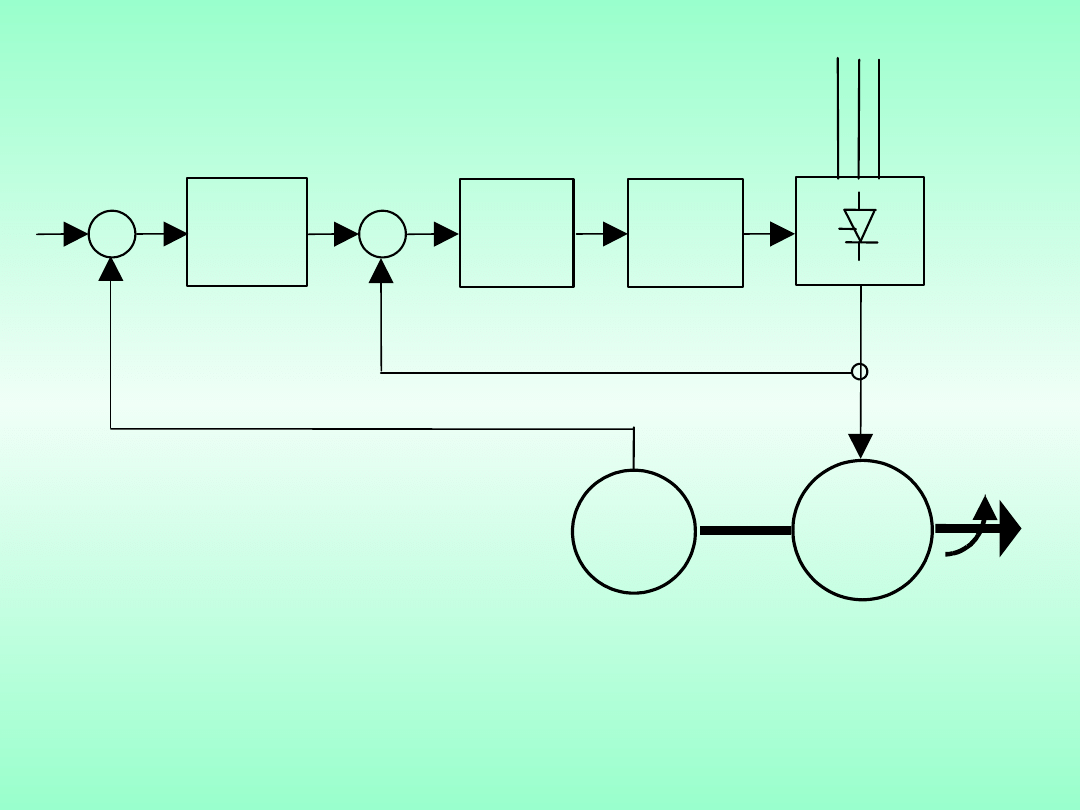
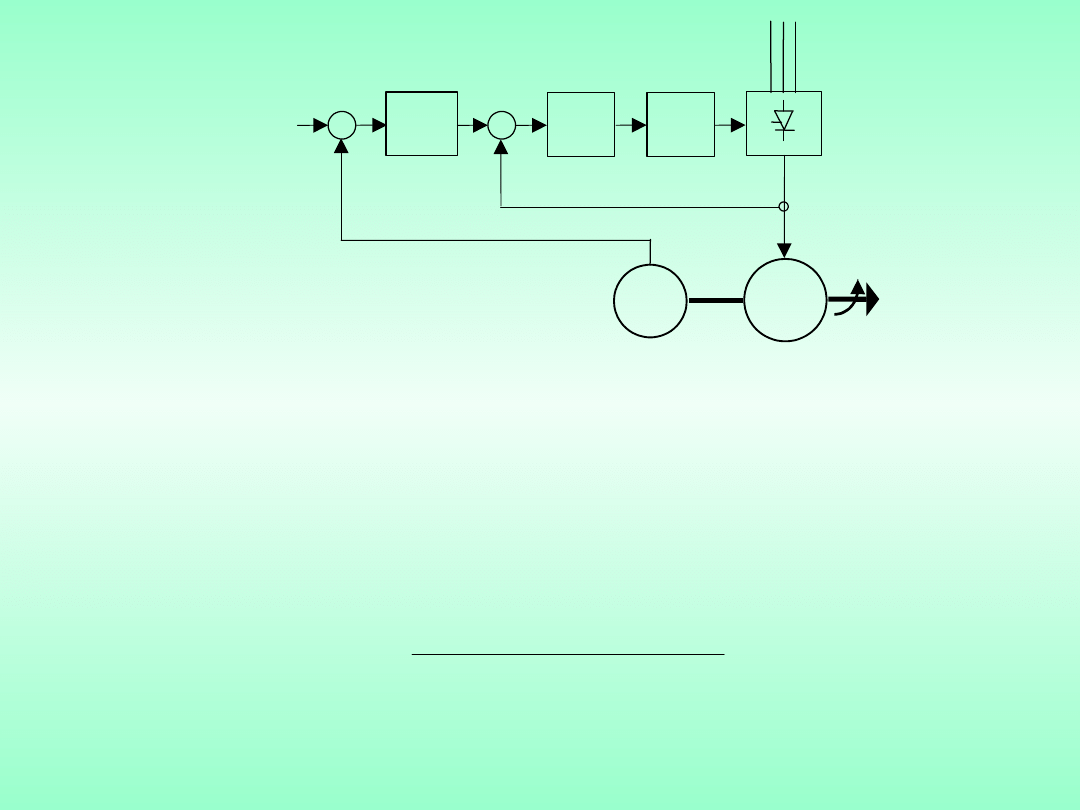
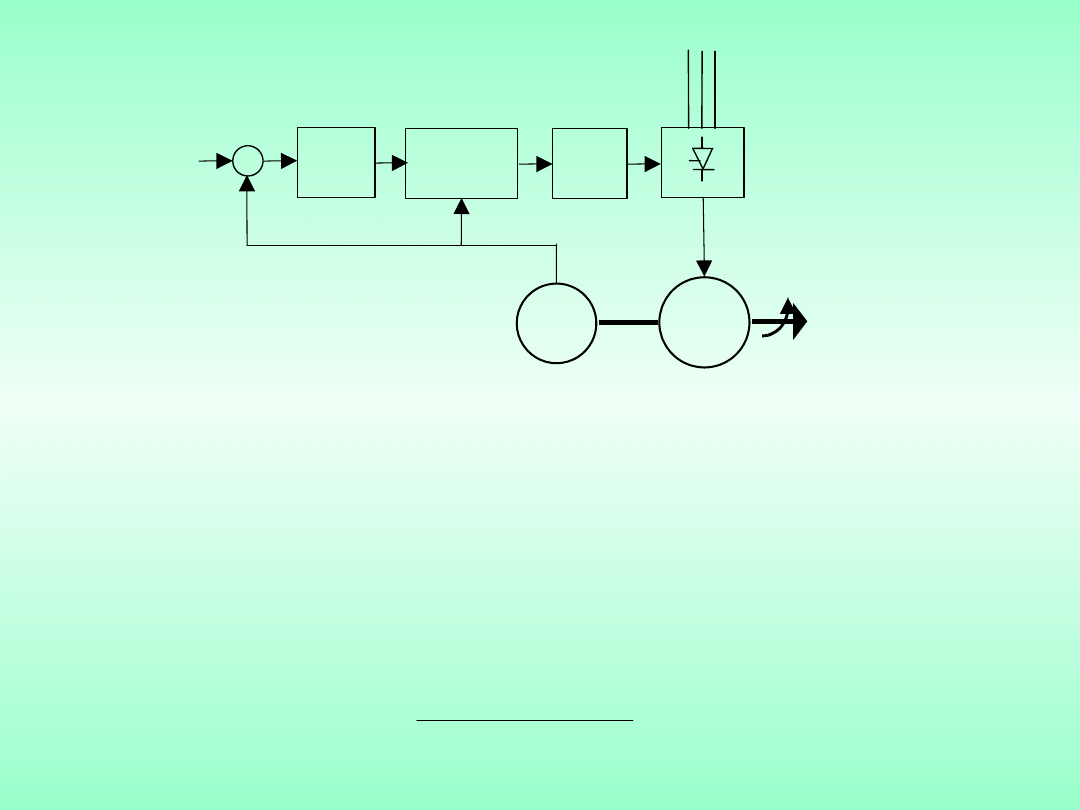
Rys. 7.15. Schemat blokowy tyrystorowego układu
napędowego ze sprzężeniem zwrotnym: prędkościowym i
prądowym
Regulator
prędkości
Regulator
prądu
Sterownik
Zapłonnik
R S T
M
n
U
J
= K
J
I
t
U
PT
= K
PT
n
1
K
3
K
2
K
1
U
3
U
2
U
1
U
U
Z
+
+
2
-
n
-
I
t
U
Prądnica
tacho-
metryczna
Silnik
prądu
stałego
1.5.4. Tyrystorowy układ regulacji
prędkości
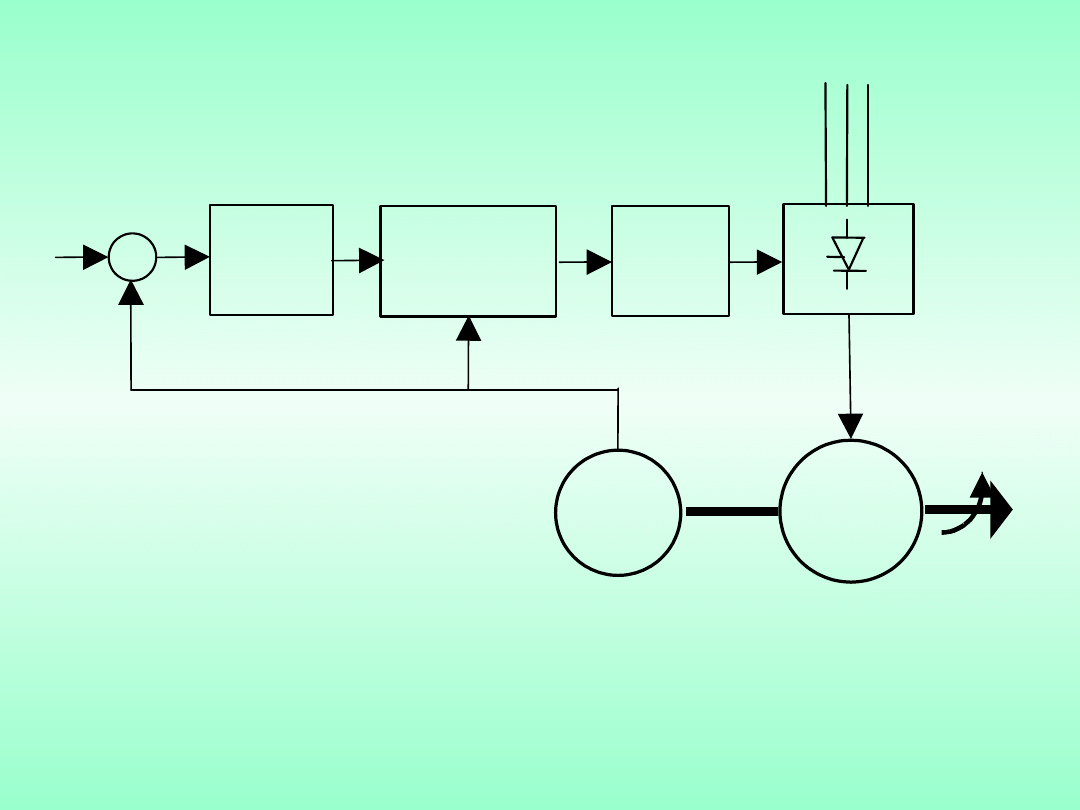
Rys. 7.16. Schemat blokowy tyrystorowego układu napędowego ze
sprzężeniem zwrotnym: prędkościowym
Regulator
prędkości
Ogranicznik
prądów
dynamicznych
Sterownik
Zapłonnik
R S T
U
PT
= K
PT
n
K
3
K
1
K
2
U
1
U
2
U
U
Z
+
1
-
I
t
U
M
n
n
Prądnica
tacho-
metryczna
Silnik
prądu
stałego
n
K
U
U
U
U
PT
Z
PT
Z
J
t
1
J
1
2
K
I
K
U
U
U
U
3
2
2
K
K
U
n
PT
3
2
1
J
3
2
t
3
2
1
Z
K
K
K
K
1
K
K
K
I
K
K
K
U
n
(7.13
)
(7.14
)
(7.15
)
(7.16
)
(7.17
)
Regulator
prędkości
Regulator
prądu
Sterownik
Zapłonnik
R S T
M
n
U
J
= K
J
I
t
U
PT
= K
PT
n
1
K
3
K
2
K
1
U
3
U
2
U
1
U
U
Z
+
+
2
-
n
-
I
t
U
Prądnica
tacho-
metryczna
Silnik
prądu
stałego
1
1
K
U
U
Regulator
prędkości
Ogranicznik
prądów
dynamicznych
Sterownik
Zapłonnik
R S T
U
PT
= K
PT
n
K
3
K
1
K
2
U
1
U
2
U
U
Z
+
1
-
I
t
U
M
n
n
Prądnica
tacho-
metryczna
Silnik
prądu
stałego
n
K
U
U
U
U
PT
Z
PT
Z
3
2
1
K
K
K
U
n
PT
3
2
1
3
2
1
Z
K
K
K
K
1
K
K
K
U
n
(7.18
)
1
1
K
U
U
(7.19
)
2
1
2
K
U
U
(7.20
)
(7.21
)
(7.22
)
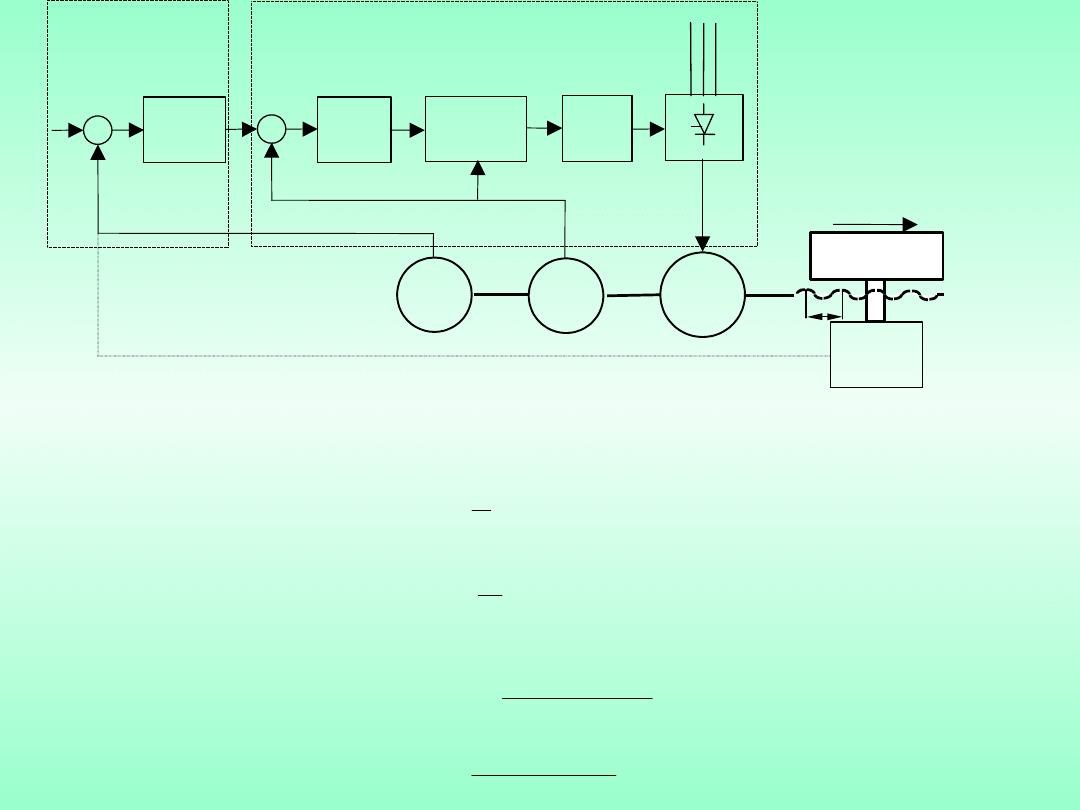
1.5.5. Serwomechanizm z silnikiem prądu
stałego
Regulator
prędkości
Regulator
położenia
Ogranicznik
prądów
dynamicznych
Sterownik
Zapłonnik
U
PT
= K
PT
n
K
p
K
1
K
2
U
1
U
2
U
U
z
x
gen
+
+
x
ist
lub
ist
-
-
I
t
U
R S T
K
3
M
n
X v
n
h
Liniowy układ
pomiarowy
położenia
Układ
pomiarowy
położenia
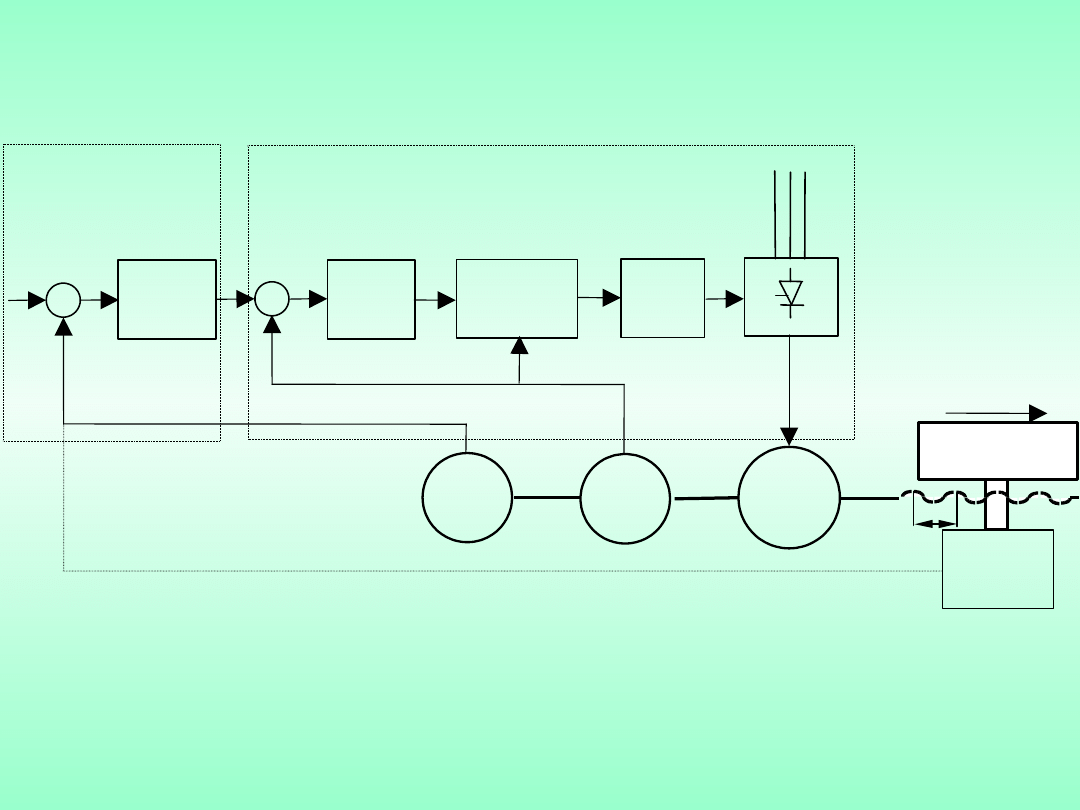
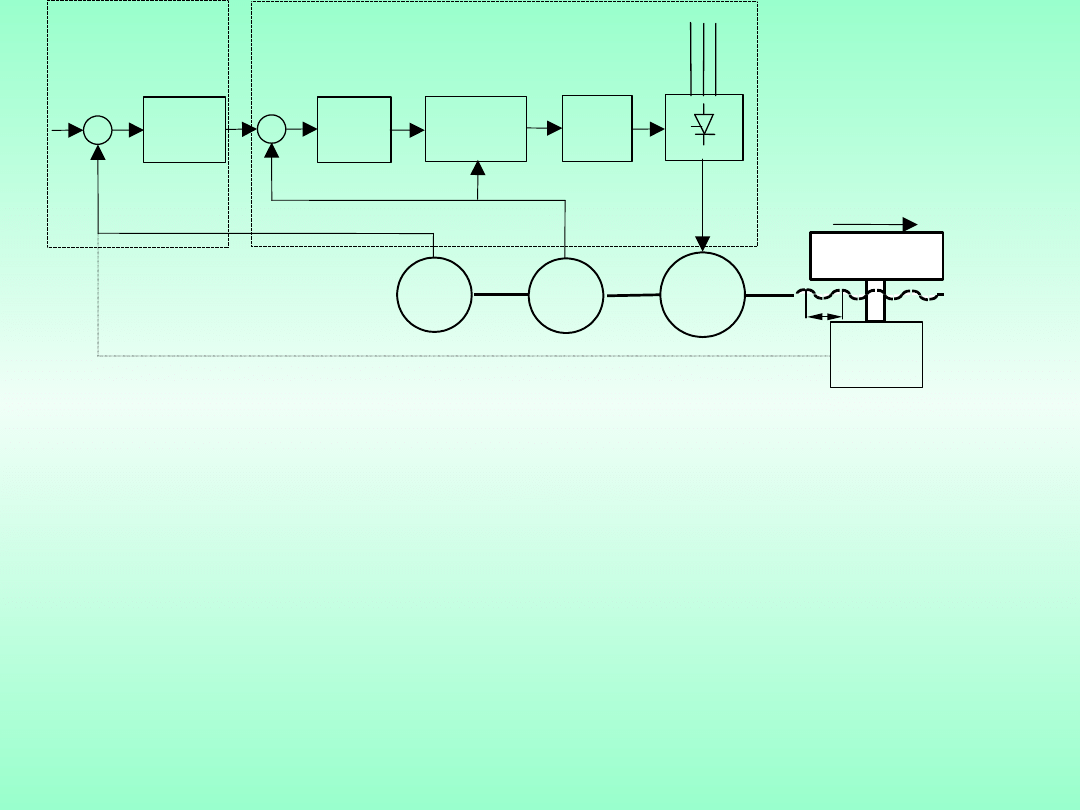
Zespół
przesuwny
Prądnica
tacho-
metryczna
Silnik
prądu
stałego
Tyrystorowy układ
napędowy
Sterownik napędu w
układzie sterowania
numerycznego
Rys. 7.17. Schemat blokowy serwonapędu z silnikiem prądu stałego
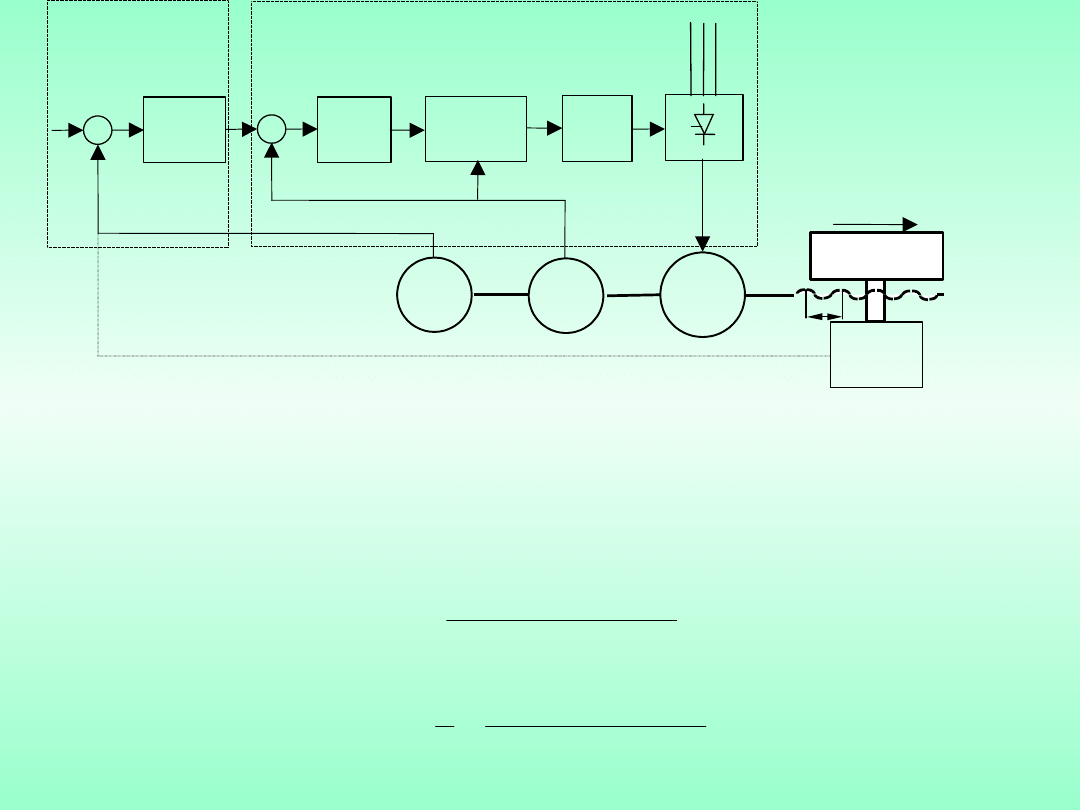
Regulator
prędkości
Regulator
położenia
Ogranicznik
prądów
dynamicznych
Sterownik
Zapłonnik
U
PT
= K
PT
n
K
p
K
1
K
2
U
1
U
2
U
U
z
x
gen
+
+
x
ist
lub
ist
-
-
I
t
U
R S T
K
3
M
n
X v
n
h
Liniowy układ
pomiarowy
położenia
Układ
pomiarowy
położenia
Zespół
przesuwny
Prądnica
tacho-
metryczna
Silnik
prądu
stałego
Tyrystorowy układ
napędowy
Sterownik napędu w
układzie sterowania
numerycznego
ist
gen
x
x
ist
gen
p
p
Z
x
x
K
K
U
n
h
v
h
K
K
K
K
1
K
K
K
K
v
PT
3
2
1
3
2
1
p
h
K
K
K
K
1
K
K
K
K
v
K
PT
3
2
1
3
2
1
p
v
(7.23)
(7.24)
(7.25)
(7.26)
(7.27)
Regulator
prędkości
Regulator
położenia
Ogranicznik
prądów
dynamicznych
Sterownik
Zapłonnik
U
PT
= K
PT
n
K
p
K
1
K
2
U
1
U
2
U
U
z
x
gen
+
+
x
ist
lub
ist
-
-
I
t
U
R S T
K
3
M
n
X v
n
h
Liniowy układ
pomiarowy
położenia
Układ
pomiarowy
położenia
Zespół
przesuwny
Prądnica
tacho-
metryczna
Silnik
prądu
stałego
Tyrystorowy układ
napędowy
Sterownik napędu w
układzie sterowania
numerycznego
E
1
= E
K
1
= (E
z
- E
i
) K
1
(7.28)
Jeżeli pominąć obecność sprzężenia prędkościowego E
v
, ( E
2
= E
3
) to:
E
3
= E
K
1
K
2
(7.29)
gdzie: K
2
- wzmocnienie regulatora prędkości, E
3
- sygnał
sterujący dopływem energii do silnika.
Prędkość kątowa w [rad/s] wału silnika wynosi:
= E
K
1
K
2
K
S
K
E
(7.30)
gdzie: K
S
- wzmocnienie zasilacza tyrystorowego, K
E
- stała
napięciowa silnika prądu stałego.
Ważną wielkością charakterystyczną serwomechanizmu jest współczynnik
wzmocnienia prędkościowego k
v
, który określony jest zależnością:
k
v
= = K
1
K
2
K
S
K
E
E
(
7.31)
[s
-1
]
(7.32)
gdzie: v - prędkość ruchu [mm/s],
- uchyb położeniowy [mm].
=
(7.33)
k
v
=
(7.34)
Regulator
prędkości
Regulator
położenia
Ogranicznik
prądów
dynamicznych
Sterownik
Zapłonnik
U
PT
= K
PT
n
K
p
K
1
K
2
U
1
U
2
U
U
z
x
gen
+
+
x
ist
lub
ist
-
-
I
t
U
R S T
K
3
M
n
X v
n
h
Liniowy układ
pomiarowy
położenia
Układ
pomiarowy
położenia
Zespół
przesuwny
Prądnica
tacho-
metryczna
Silnik
prądu
stałego
Tyrystorowy układ
napędowy
Sterownik napędu w
układzie sterowania
numerycznego
V
k
V
PT
E
S
2
E
S
2
1
K
K
K
K
1
K
K
K
K
E
PT
E
S
2
E
S
2
1
K
K
K
K
1
K
K
K
K
K
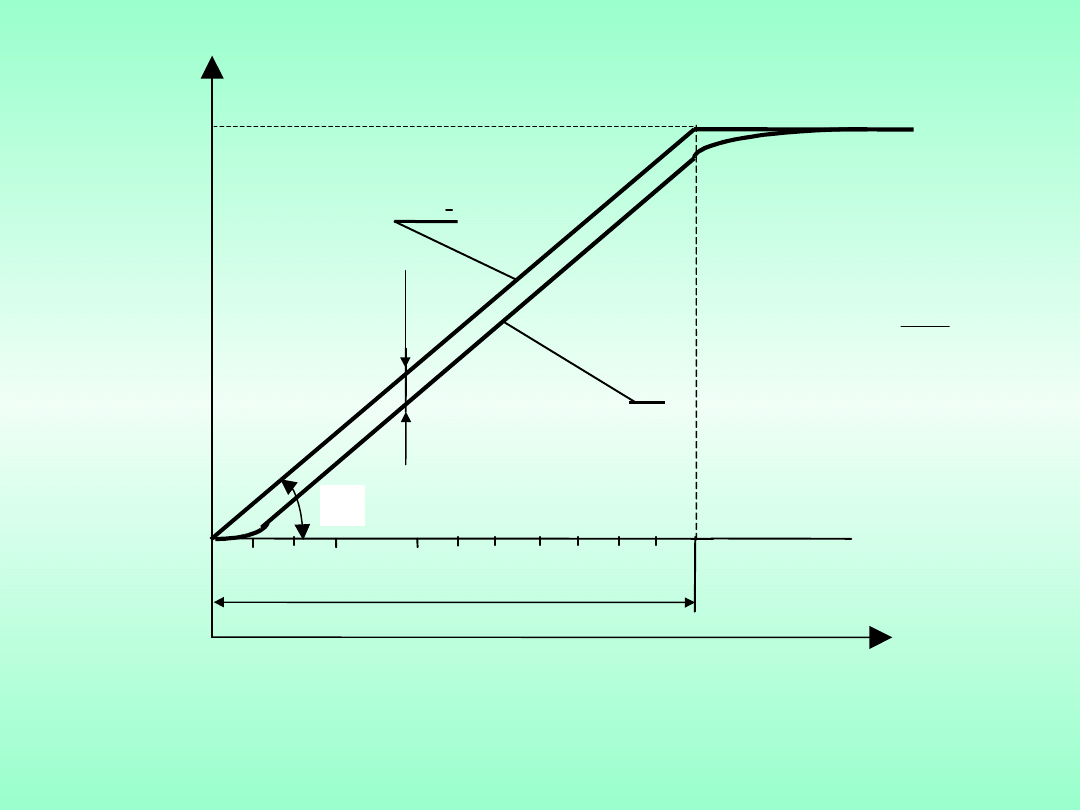
czas t
x
zad
x
x
gen
e
X
x
ist
T
Rys. Ilustracja generowania przemieszczeń w osi X oraz powstawania
uchybu położenia
T
x
tg
V
zad
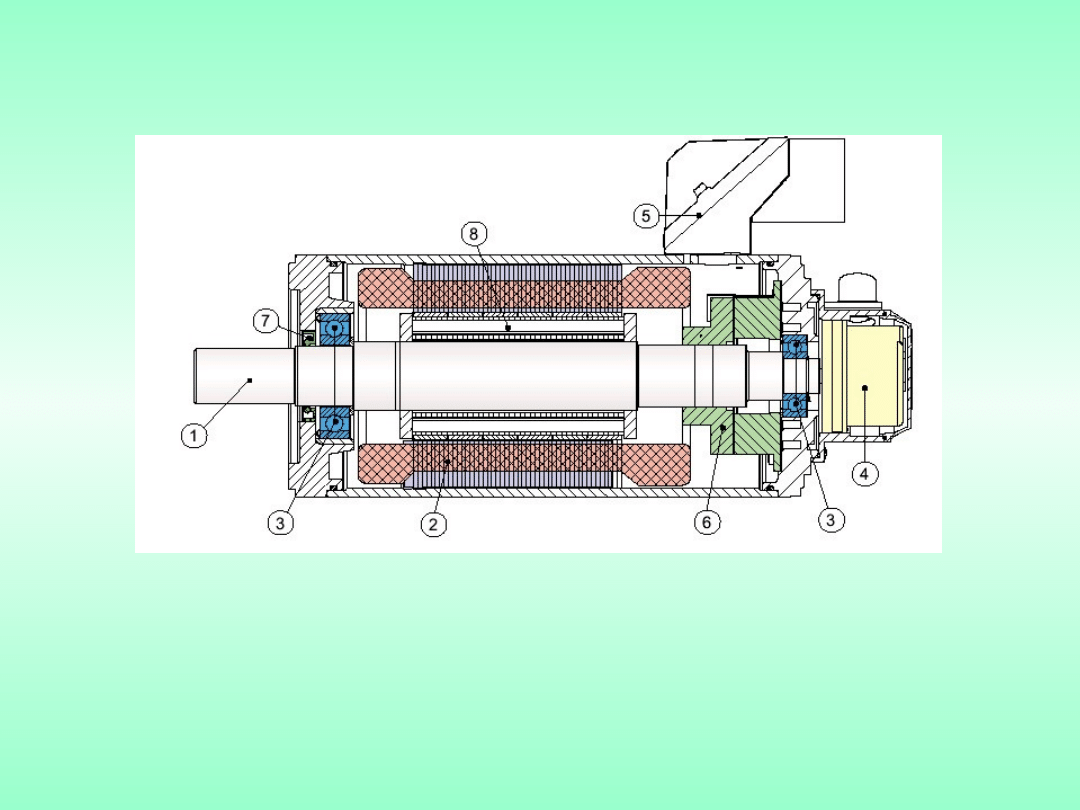
1.5.6. Napędy prądu stałego z silnikami
bezkomutatorowymi
Rys. 7.18. Bezkomutatorowy silnik prądu stałego lub silnik
synchroniczny prądu przemiennego: 1–wał silnika, 2–uzwojenia w
stojanie, 3–łożyska wirnika, 4–czujnik położenia kątowego wirnika, 5–
wentylator, 6–hamulec, 7– pierścień uszczelniający, 8–wirnik z
segmentami magnetycznymi (magnesy trwałe)
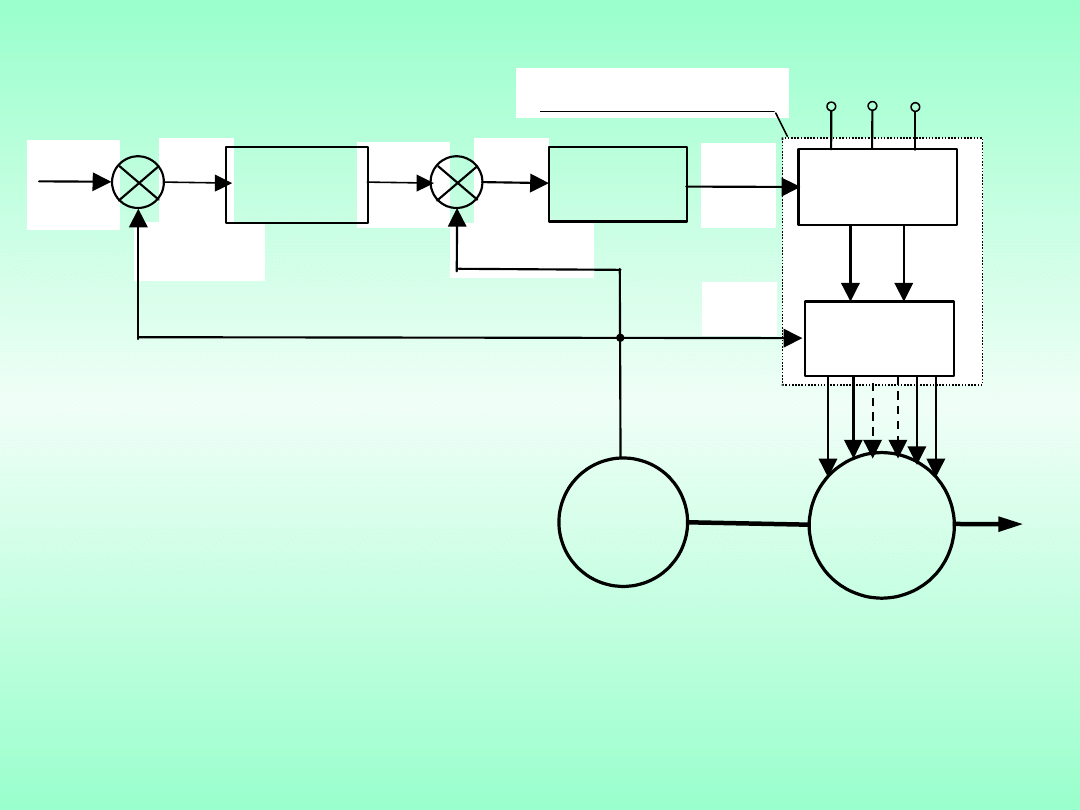
U
PT
(n
ist
)
U
3
()
U
2
(
n
)
U
1
(n
zad
)
U
ist
(
ist
)
U
()
U
Z
(
zad
)
Prostownik
tyrystorowy
Regulator
prędkości
Regulator
położenia
n
Silnik
Czujnik
położenia
kątowego
n
2=
R S T
U
S
Komutator
elektroniczny
ist
Zespół zasilania
silnika
Rys. 7.19. Schemat blokowy układu regulacji prędkości z silnikiem z
komutacją elektroniczną

Silniki skokowe
Silnik skokowy zwany także silnikiem krokowym przetwarza ciąg
impulsów sterujących na ciąg obrotów kątowych. Kąt obrotu wirnika jest
proporcjonalny do liczby impulsów sterujących, a prędkość obrotowa do
częstotliwości tych impulsów. Silniki skokowe znalazły zastosowanie przede
wszystkim w tych robotach, gdzie obciążenie jest relatywnie niewielkie. Silniki
skokowe mogą pracować w układzie otwartym sterowania, bez kontroli
wykonanego położenia, ponieważ po każdym impulsie sterującym wirnik
wykonuje obrót o ściśle określony kąt. Wartość tego kąta, odpowiadającego
pojedynczemu impulsowi sterującemu, nazywana jest skokiem lub krokiem
silnika. Układ z silnikami skokowymi reaguje na serię impulsów tak, że
wykonywany ruch o dokładnie określonej liczbie skoków odpowiada ściśle
liczbie impulsów.
Ze względu na zasadę działania i cechy konstrukcyjne silniki skokowe
można podzielić na trzy zasadnicze grupy:
• silniki o wirniku biernym (reluktancyjne) z momentem reluktancyjnym,
• silniki o wirniku czynnym (prawie wyłącznie maszyny magnetoelektryczne),
wykorzystujące moment synchroniczny wzbudzeniowy,
• silniki hybrydowe, wykorzystujące zarówno moment synchroniczny, jak i
moment reluktancyjny.
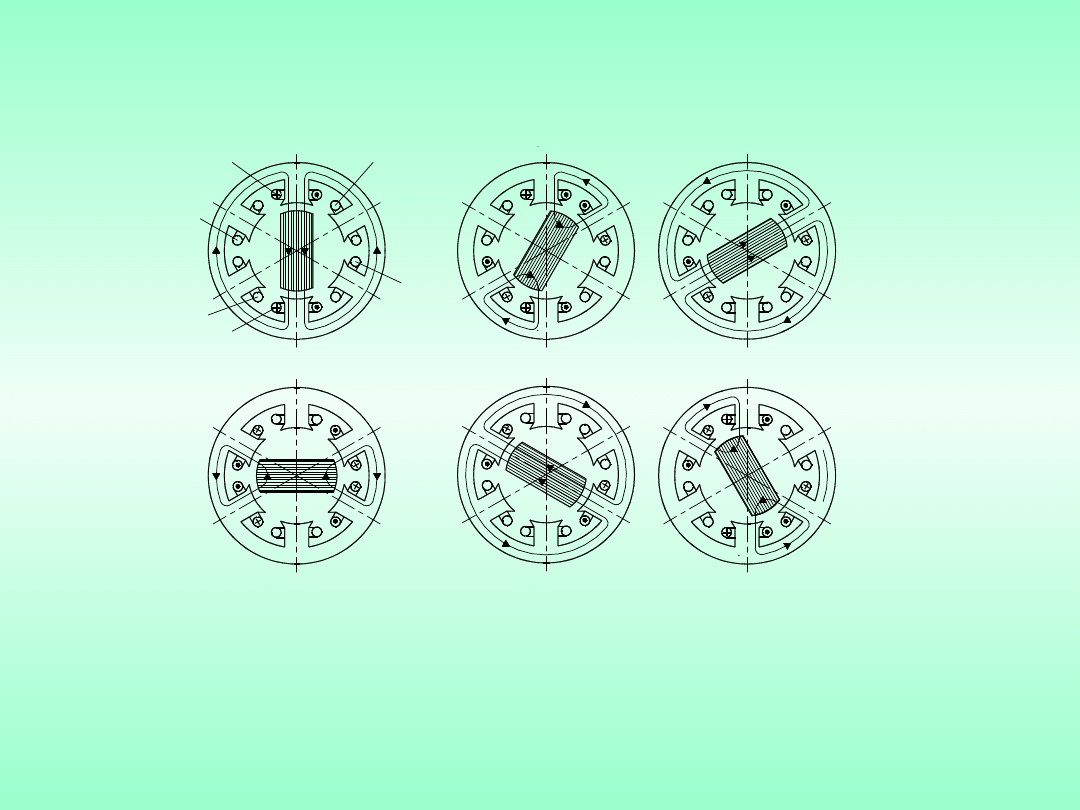
Na rys. pokazana jest zasada działania trójfazowego silnika skokowego
reluktancyjnego o sześciu biegunach na stojanie. Układ faz składa się z
uzwojeń sterowania fazy pierwszej (11, 12), fazy drugiej (21, 22) i fazy
trzeciej (31, 32).
e )
1
2
d )
a )
I V
1
2
2
1
2
3
I
2
1
1
3
b )
V
I I
f )
V I
c )
I I I
Kiedy prąd pojawi się w uzwojeniach 11, 12 fazy pierwszej wirnik zajmuje pozycję
I (rys. a), w której wartość reluktancji dla strumienia magnetycznego jest
minimalna. Gdy w następnej chwili prąd występuje w uzwojeniach 11, 12 fazy
pierwszej i jednocześnie w 21, 22 fazy drugiej, wirnik zajmie położenie pośrednie II
(rys. b). Następnie w paśmie 11, 12 nie ma już prądów i wirnik pod działaniem sił
pola magnetycznego od prądów w uzwojeniach 21, 22 zajmuje położenie III (rys. c)
itd. Następne zmiany prądów powodują kolejne zmiany pozycji wirnika (rys. d→ rys.
7.25e→ rys. f).
W celu polepszenia charakterystyk silniki skokowe wykonywane są ze
zwiększoną liczbą faz: czterofazowe, pięciofazowe (i nawet z większą ilością
faz), ponieważ ze wzrostem liczby faz maszyny elektrycznej zwiększają się
moment obrotowy i liczba skoków na jeden obrót (to znaczy maleje wartość
skoku znamionowego).
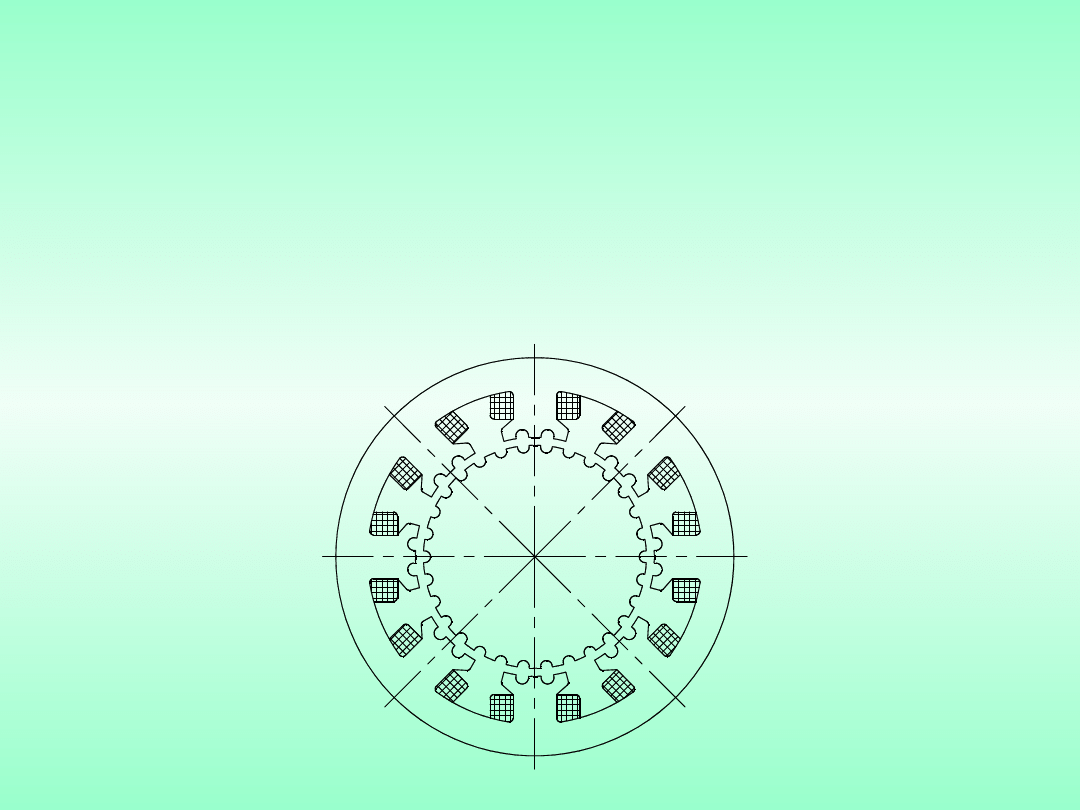
Struktura czterofazowego silnika skokowego pokazana jest na rys.
Silnik zawiera osiem biegunów wydatnych z ulokowanymi na każdym z nich
trzema zębami oraz 30 zębów na wirniku. Silnik ten może realizować pracę
pełnoskokową z komutacją: 1
2 3 4 1 … (komutacja czterotaktowa
pojedyncza) lub 1, 2
2, 3 3, 4 4, 1 1, 2 … (komutacja czterotaktowa
parowa symetryczna), półskokową: 1
1, 2 2 2, 3 3 3, 4 4 4, 1 1 …
(komutacja ośmiotaktowa parowa niesymetryczna) oraz inny rodzaj pracy z
odpowiednio zmieniającą się kombinacją włączonych grup faz: 1, 2
1, 2, 3 2,
3
2, 3, 4 3, 4 3, 4, 1 1, 2 ... itd.
V I I
3
2
V I
2
2
V
1
2
V I I I
I
4
2
1
1
1
3
I I I
1
4
I V
2
1
I I
W konstrukcji na nabiegunnikach stojana są wykonane zęby (o takie
samej podziałce jak podziałka żłobkowa wirnika) w ten sposób, że pod
przeciwległymi biegunami ustawione są zęby stojana i wirnika naprzeciwko
siebie, a pozostałe bieguny przesunięte są o 1/4 podziałki żłobkowej do
zębów wirnika. Zatem podziałka żłobkowa wirnika stanowi . Przy komutacji
niesymetrycznej ośmiotaktowej według algorytmu 1
1, 2 – 2 2, 3 – 3 3, 4 –
4
4, 1 – 1 … otrzymuje się skok odpowiadający 1/8 podziałki żłobkowej
wirnika (skok pojedynczy stanowi: 12/8 = 1,5 przy 240 skokach w jednym
obrocie wirnika).
Wartość skoku silnika reluktancyjnego przy komutacji symetrycznej
(n = 1) wynosi
3
4
30
360
360
m
Z
R
r
a liczba skoków w jednym obrocie wirnika stanowi n
s
= 360
0
/3
0
= 120.
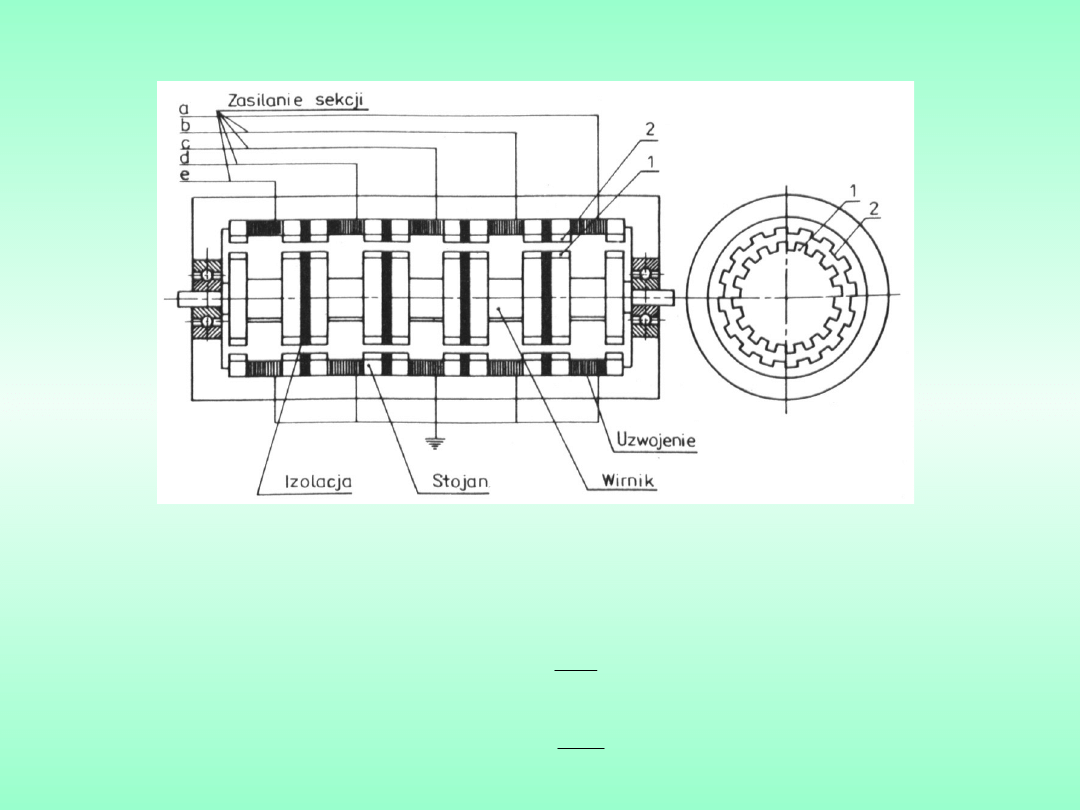
Rozpowszechnionym silnikiem w napędach maszyn jest silnik
pięciosekcyjny
Każda sekcja stojana posiada taką samą liczbę ząbków jak wirnik, ale
przesuniętych o 1/5 podziałki. Kolejność włączania poszczególnych sekcji
realizowana jest wg dwóch sposobów: obrót o całą podziałkę odbywa się po 5
impulsach, albo po 10 impulsach sterujących.
W pierwszym przypadku elementarny obrót wałka wynosi:
0
3
5
z
360
=
w drugim przypadku:
0
5
,
1
10
z
360
=
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
Wyszukiwarka
Podobne podstrony:
Układy Napędowe oraz algorytmy sterowania w bioprotezach
4 Główne układy napędowe
dudziński,układy napędowe,Hamowanie elektryczne silników indukcyjnych
dudziński,układy napędowe,Sprowadzenie momentów mechanicznych
uklady napedowe 3
dudziński,układy napędowe,Rozruch silników indukcyjnych pierścieniowych
Zawory hydrauliczne, PWR, hydrostatyczne układy napędowe, pomoce naukowe
dudziński,układy napędowe, opracowanie pytań kolokwium
dudziński,układy napędowe,Metody kształtowania przebiegu charakterystyk mechanicznych silnika indukc
Uklady napedowe 2 lab, LABKA
dudziński,układy napędowe, Podstawy napędu hydrostatycznego
UKŁADY NAPĘDOWE 1
Układy napędowe i wzmacniacze, Mechatronika
Amplidyna, ►Studia, Semestr 8, Układy Napędowe Robotów
dudziński,układy napędowe,Charakterystyki mechaniczne silnika szeregowego prądu stałego
więcej podobnych podstron