Seria: Informatyka
Metody niezawodności i
eksploatacji
Wykład 5
Niezawodność systemów
dr hab. inż. Tadeusz Nowicki prof.
nadzw. WAT
e-mail:nowicki@isi.wat.edu.pl, tel. 6-
837118
n
i
e
e
e
e
e
E
,...,
,...,
,
,
3
2
1
zbiór elementów
struktury
niezawodnościowej
systemu
1
,
0
Y
,
X
,
Y
,
X
i
i
Y
X
,
,
S
1
i
n
i
R
Y
X
...
X
:
)
(
f
R
n
1
(n)
x
zbiory stanów
niezawodnoś-ciowych
elementów i systemu
struktura
niezawodnościo-wa
systemu
Rozpatrujemy systemy o elementach dwustanowych w
sensie nieza-wodności uszkadzających się niezależnie
(podejście klasyczne). Zatem strukturalna funkcja
niezawodnościowa systemu ma postać:
1
,
0
1
,
0
:
)
(
f
(n)
n
x
Dla elementów i systemu
dwustano-wych w sensie
niezawodności
Przypomnienie
Wyrażenie bulowskie nie zawierające znaku działania negacji
nazywane jest wyrażeniem alternatywno-koniunkcyjnym (wak).
Każdą funkcje monotoniczną (koherentną) można przedstawić
za pomocą wak.
Oznaczmy symbolem „
+”
alternatywę, a symbolem „
·”
koniunkcję. Wtedy przykładem takiej funkcji może być poniższy
zapis
4
3
1
2
3
2
1
(4)
x
)
x
x
(
x
x
x
x
(x)
f
Każde wak można przedstawić w postaci
formuły
alternatywnej
(sumoiloczyn) lub w postaci
formuły koniunkcyjnej
(iloczyn
sum)
4
3
4
1
2
3
2
1
(4)
x
x
x
x
x
x
x
x
(x)
f
)
x
x
)(
x
x
(x
)
x
x
x
)(
x
x
(x
(x)
f
4
2
4
2
1
4
3
2
3
2
1
(4)
Analityczny zapis struktur
niezawodnościowych
Minimalną
formułą
alternatywną
(mfa)
funkcji
monotonicznej nazywamy formułę alternatywną o
najmniejszej liczbie składników sumy (nieredukowalną)
(mfa)
x
x
x
x
x
(x)
f
4
3
4
1
2
(4)
Minimalną formułą koniunkcyjną
(mfk) funkcji
monotonicznej nazywamy formułę koniunkcyjną o
najmniejszej liczbie czynników (sum)
(mfk)
)
x
x
)(
x
x
(x
(x)
f
4
2
3
2
1
(4)
Analityczny zapis struktur
niezawodnościowych

Podzbiór W E elementów systemu nazywa się
ścieżką
zdatności
, jeśli przy zdatności wszystkich elementów należących
do W system jest w stanie zdatności niezależnie od stanu
pozostałych elementów systemu.
Ścieżka zdatności jest
minimalną
, jeśli nie zawiera żadnej innej
ścieżki zdatności.
Minimalna formuła alternatywna (mfa) określa jednoznacznie
zbiór wszystkich minimalnych ścieżek zdatności - każdemu
składnikowi
sumy
(iloczynowi)
odpowiada
wzajemnie
jednoznacznie minimalna ścieżka zdatności.
Podzbiór C E elementów systemu nazywa się
cięciem
(przekrojem), jeśli przy niezdatności wszystkich elementów
należących do C system jest w stanie niezdatności niezależnie
od stanu pozostałych elementów systemu.
Cięcie jest
minimalne
, jeśli nie zawiera żadnych innych cięć.
Minimalna formuła koniunkcyjna (mfk) określa jednoznacznie
zbiór wszystkich minimalnych cięć - każdemu czynnikowi
(sumie) odpowiada wzajemnie jednoznacznie minimalne cięcie.
Ścieżki zdatności i cięcia w
systemie
(mfa)
x
x
x
x
x
(x)
f
4
3
4
1
2
(4)
(mfk)
)
x
x
)(
x
x
(x
(x)
f
4
2
3
2
1
(4)
x
1
x
3
x
2
x
4
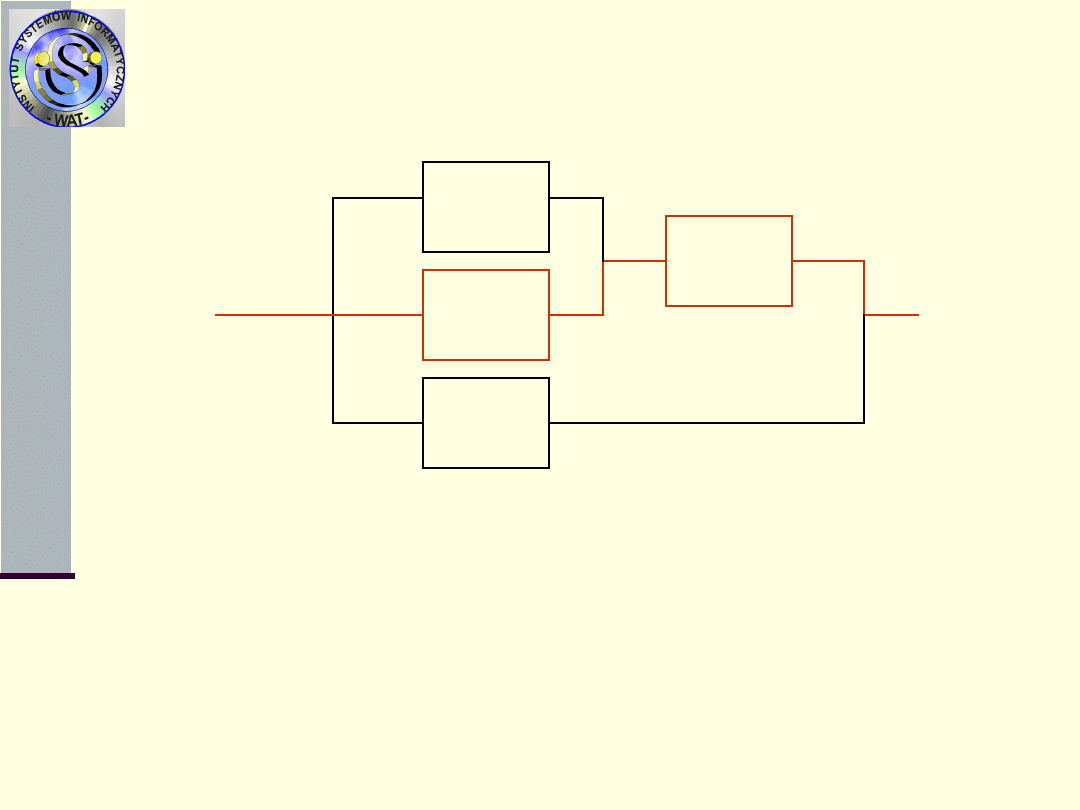
Przykład
Schemat blokowy struktury
niezawodnościowej
Ścieżki zdatności i cięcia w
systemie
Dla każdej struktury monotonicznej (koherentnej)
określonej przez f
(n)
(x) istnieje dualna struktura
koherentna określona przez funkcję monotoniczna f
(n)
D
(x).
Wyrażenie bulowskie, określające funkcję dualną
otrzymujemy w ten sposób, że w wyrażeniu bulowskim,
określającym f
(n)
(x)m, zamieniamy wszystkie znaki
alternatywy na znaki koniunkcji, a znaki koniunkcji na
znaki alternatywy. Dla funkcji
4
3
1
2
3
2
1
(4)
x
)
x
x
(
x
x
x
x
(x)
f
Funkcja dualna ma postać
)
x
x
x
)(
x
)(
x
x
(x
(x)
f
4
3
1
2
3
2
1
(4)
D
Z definicji wynika, że mfa funkcji
f
(n)
D
(x)
otrzymujemy
bezpośrednio z mfk funkcji
f
(n)
(x),
a mfk funkcji
f
(n)
D
(x)
bezpośrednio z mfk
f
(n)
(x). Przykład :
)
x
x
)(
x
x
)(
(x
(x)
f
4
3
4
1
2
(4)
D
x
x
x
x
x
(x)
f
4
2
3
2
1
(4)
D
Struktury dualne
Wyróżnia się niektóre podstawowe struktury, które mogą
być podstrukturami bardziej złożonych struktur.
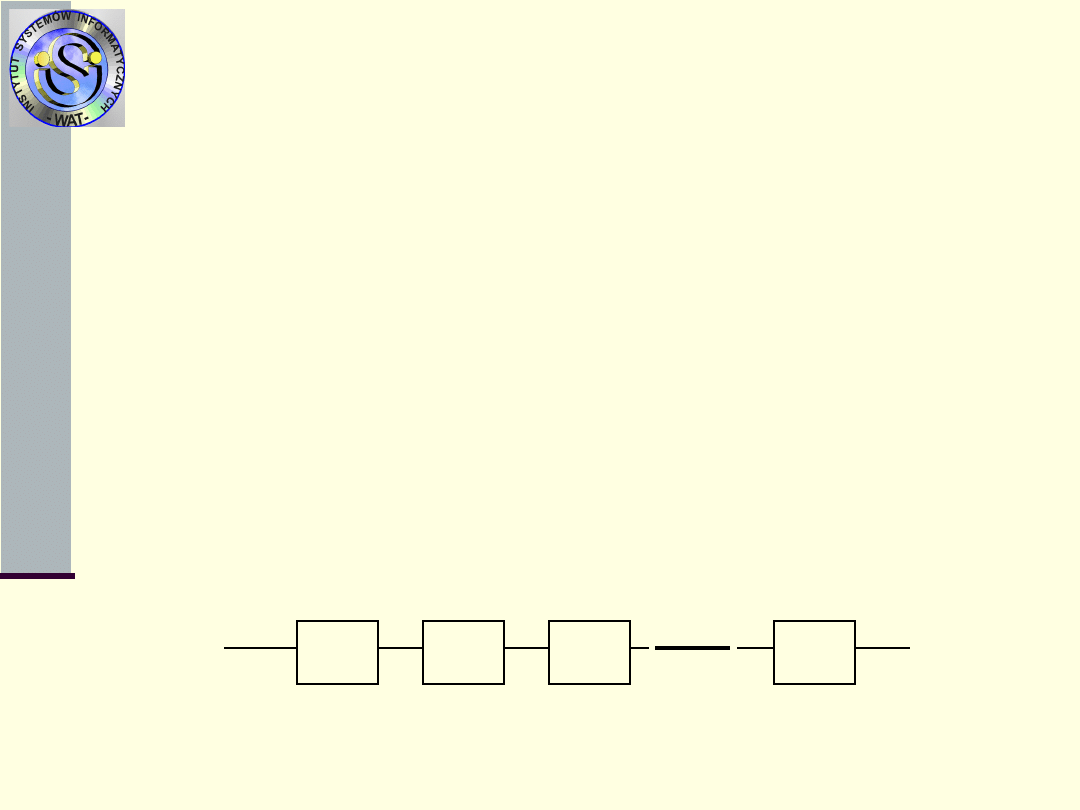
1. Struktura szeregowa
- gdy niezdatność dowolnego
elementu struktury powoduje niezdatność całego systemu
n
1
i
(n)
x
(x)
f
i
Funkcja dualna dla struktury szeregowej
ma postać
n
1
i
i
(n)
D
x
(x)
f
Schemat blokowy dla struktury szeregowej ma postać
x
1
x
2
x
3
x
n
Elementarne struktury
niezawodnościowe
2. Struktura równoległa
- gdy zdatność dowolnego
elementu struktury powoduje zdatność całego systemu
n
1
i
i
(n)
x
(x)
f
Funkcja dualna dla struktury równoległej
ma postać
n
i 1
i
(n)
D
x
(x)
f
Schemat blokowy dla struktury
równoległej ma postać
x
1
x
2
x
3
x
n
Elementarne struktury
niezawodnościowe

3. Struktury progowe
(tak zwane struktury „k z n”)- gdy
zdatność dowolnych co najmniej k elementów struktury
powoduje zdatność całego systemu.
Przykładem może być struktura progowa „2 z 3”
3
2
3
1
2
1
(3)
x
x
x
x
x
x
(x)
f
Funkcja dualna dla tej struktury ma
postać
)
x
)(x
x
)(x
x
x
(
(x)
f
3
2
3
1
2
1
(3)
D
Schemat blokowy dla struktury progowej nie istnieje !
Oznacza to, że nie zawsze można skonstruować schematy
blokowe dla struktur niezawodnościowych.
Uwaga: zauważmy, że
struktura progowa „1 z n” jest
strukturą
struktura progowa „n z n” jest
strukturą
równoległ
ą
szeregową
Elementarne struktury
niezawodnościowe
Stany niezawodnościowe elementów są binarnymi
procesami stochastycznymi x
i
(t). Argument funkcji f
(n)
(x)
jest
dla
ustalonej
chwili
t
n-wymiarową zmienną losową
n
i
1
X
,...,
X
,...,
X
X
To znaczy binarnym wektorem losowym o odpowiednim
rozkładzie prawdopodobieństwa. Oznaczmy
1..n
i
,
p
-
1
q
0
X
P
,
p
1
X
P
i
i
i
i
i
oraz
n
i
1
x
,...,
x
,...,
x
x
wektor
binarny.
Wtedy
otrzymujemy
)
x
-
(1
i
n
1
i
x
i
i
i
q
p
X
P
x
że w
ustalonej
chwili stany niezawodnościowe
elementów są takie, jak określono to w wektorze x.
co jest
prawdopodobieństwem tego,
Probabilistyczny model
niezawodnościowy
Stan niezawodnościowy systemu jest bulowską zmienną
losową Y, określoną jako funkcja bulowska wektora
losowego X
1
X
x
)
i
x
-
(1
i
n
1
i
i
x
i
1
X
x
(n)
q
p
x
X
P
1
(X)
f
P
1
Y
P
(X)
f
Y
(n)
Zatem rozkład zmiennej losowej Y jest jednoznacznie
określony przez rozkład wektora losowego X
Gdzie X
1
jest podzbiorem tych wszystkich wektorów
binarnych x, dla których zachodzi f
(n)
(x) = 1. Gdy
oznaczymy X
0
jako podzbiór tych wszystkich wektorów
binarnych x, dla których zachodzi f
(n)
(x) = 0, to
0
X
x
)
i
x
-
(1
i
n
1
i
i
x
i
0
X
x
q
p
1
x
X
P
1
1
Y
P
Probabilistyczny model
niezawodnościowy
Prawdopodobieństwa p
i
oraz q
i
określone zostały dla
wybranej, ustalonej chwili t. Co zrobić, gdy chcemy znać
charakterystyki niezawodnościowe systemu nie tylko dla
ustalonych momentów czasu. Rozpatrzmy poniższe
przypadki.
1.
Elementy
systemu
są
elementami
prostymi
nieodnawialnymi
Wtedy prawdopodobieństwa p
i
oraz q
i
zastępujemy
odpowiednio funkcjami
t
i
i
i
T
P
(t)
R
p
funkcja niezawodności
elementu prostego
nieodnawialnego
t
i
i
i
T
P
(t)
F
q
dystrybuanta elementu
prostego nieodnawialnego
Wtedy otrzymujemy
)
i
x
-
(1
i
1
X
x
n
1
i
i
x
i
(n)
(t)
F
(t)
R
1
(X)
f
P
1
Y
P
Probabilistyczny model
niezawodnościowy
2. Elementy systemu są elementami prostymi
odnawialnymi
Zauważmy, że muszą być to elementy z niezerową
odnową, bo w przeciwnym przypadku system byłby
zawsze w stanie zdatności.Wtedy prawdopodobieństwa p
i
oraz q
i
zastępujemy odpowiednio funkcjami
1
(t)
X
P
(t)
k
p
i
i
g
i
współczynnik gotowości
elementu odnawialnego z
niezerową odnową
0
(t)
X
P
(t)
k
-
1
q
i
i
g
i
Wtedy otrzymujemy
)
i
x
-
(1
i
g
1
X
x
n
1
i
i
x
i
g
(n)
(t)
k
1
(t)
k
1
(X)
f
P
1
Y
P
Probabilistyczny model
niezawodnościowy
3. Elementy systemu są mieszane, niektóre są
elementami prostymi nieodnawialnymi, a niektóre są
elementami prostymi odnawialnymi
Wtedy prawdopodobieństwa p
i
oraz q
i
zastępujemy
odpowiednio
1
(t)
X
P
(t)
k
p
i
i
g
i
0
(t)
X
P
(t)
k
-
1
q
i
i
g
i
Dla elementów nieodnawialnych
prostych
natomiast dla elementów odnawialnych prostych o niezerowej
odnowie
t
i
i
i
T
P
(t)
R
p
t
i
i
i
T
P
(t)
F
q
Probabilistyczny model
niezawodnościowy

Czy nie będziemy mieli żadnych kłopotów
w wyznaczeniu wartości P{f
(n)
(X(t)) = 1}?
Niestety, będziemy mieli. Wynika to z
następującego faktu:
liczności zbiorów X
1
oraz X
0
są olbrzymie
.
Istnieją metody wyznaczania formuł o
minimalnej postaci służące obliczaniu
wartości
P{f
(n)
(X(t)) = 1}.
(Przeczytać skrypt Korzana - punkt 6.11).
Warto zauważyć, że można obliczyć takie
wartości dla elementarnych struktur
niezawodnościowych i uogólnić to dla
struktur bardziej złożonych.
Obliczanie prawdopodobieństwa
zdatności systemu
t
T
,...,
T
,
T
min
P
T
P
(t)
R
n
2
1
s
s
t
1. Struktury szeregowe (elementy nieodnawialne proste)
Niech T
i
oznacza czas zdatności elementu i-tego,
natomiast T
s
oznacza czas zdatności systemu. Wtedy
mamy
n
1,2,...,
i
,
T
min
T
i
s
co daje w
efekcie
co dla niezależności uszkodzeń elementów powoduje równość
powyższego z
(t)
R
(t)
R
t
T
P
t
T
t,...,
T
t,
T
P
t
T
,...,
T
,
T
min
P
S
n
1
i
i
n
1
i
i
n
2
1
n
2
1
Z kolei dla dystrybuant otrzymujemy formułę
postaci
n
1
i
i
s
s
t
F
-
1
1
t
T
P
(t)
F
Obliczanie prawdopodobieństwa
zdatności systemu
t
T
,...,
T
,
T
max
P
T
P
(t)
F
n
2
1
s
s
t
2. Struktury równoległe (elementy nieodnawialne proste)
Niech T
i
oznacza czas zdatności elementu i-tego,
natomiast T
s
oznacza czas zdatności systemu. Wtedy
mamy
n
1,2,...,
i
,
T
max
T
i
s
co daje w
efekcie
co dla niezależności uszkodzeń elementów powoduje równość
powyższego z
(t)
F
(t)
F
t
T
P
t
T
t,...,
T
t,
T
P
t
T
,...,
T
,
T
max
P
S
n
1
i
i
n
1
i
i
n
2
1
n
2
1
Z kolei dla funkcji niezawodności otrzymujemy
formułę postaci
n
1
i
i
s
s
t
R
-
1
1
t
T
P
(t)
R
Obliczanie prawdopodobieństwa
zdatności systemu
n
k
i
D
j)
(i,
i
D
k
j
D
l
l
k
s
s
t
F
t
R
t
T
P
(t)
R
3. Struktury progowe (elementy nieodnawialne proste)
Dla przypadku ogólnego struktur progowych musimy
obliczyć wszystkie możliwe kombinacje dla poprawnych
co najmniej k elementów z n możliwych :
gdzie (i,j)D oznacza wszystkie możliwe kombinacje
par (i,j) spełniające i+j=n oraz założenie, że i oznacza
liczbę elementów zdatnych, a j liczbę elementów
niezdatnych, natomiast zbiory D
i
oraz D
j
n
,...,
2
,
1
D
D
,
j
D
,
i
D
j
i
j
i
Obliczanie prawdopodobieństwa
zdatności systemu
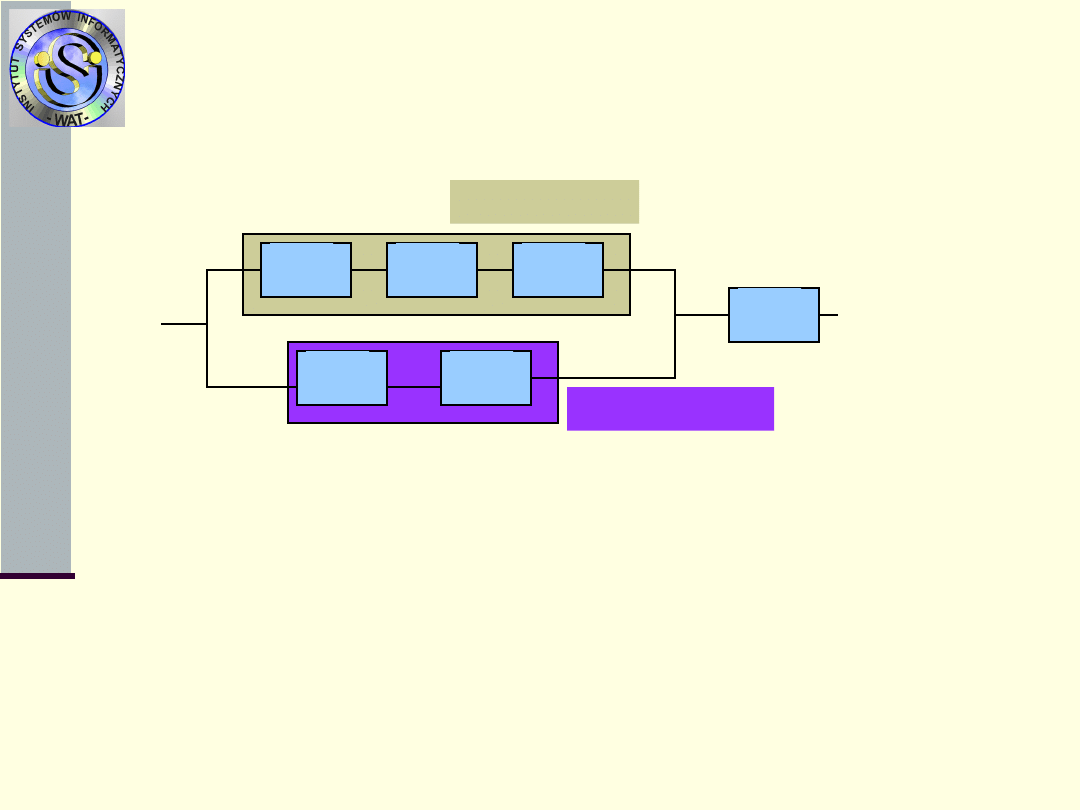
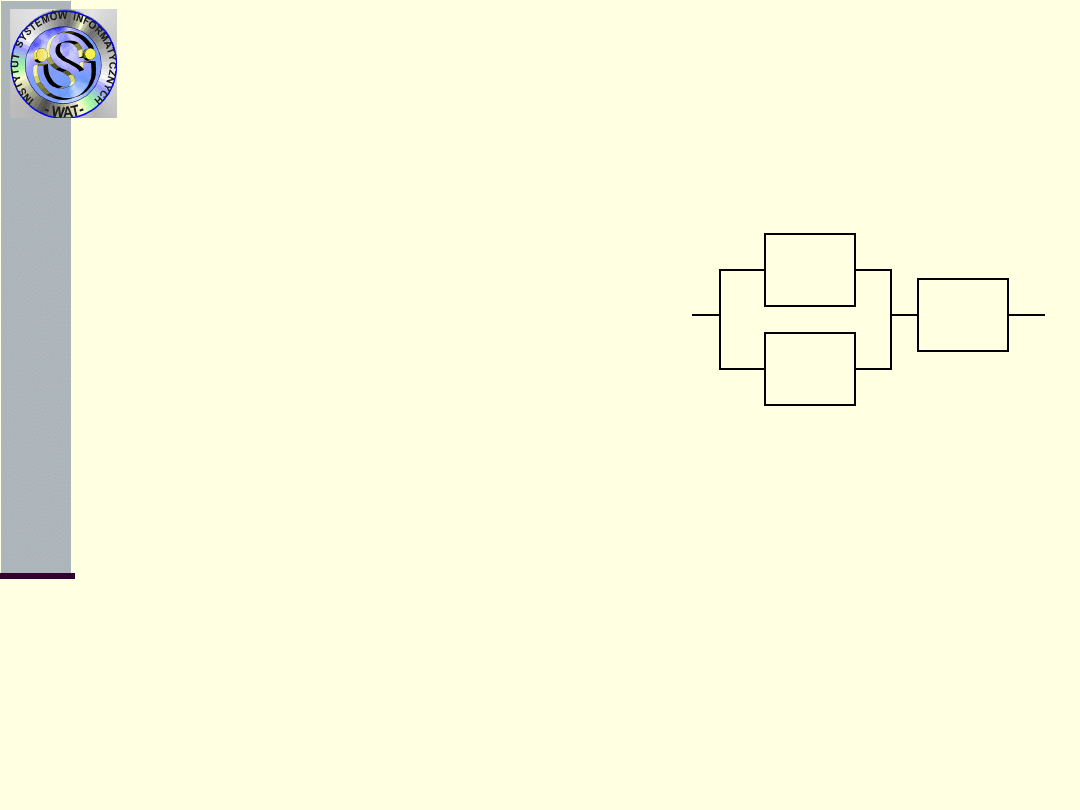
4. Struktury szeregowo-równoległe lub równoległo-
szeregowe
Dekomponujemy wtedy cały system na podsystemy
szeregowe i równo-ległe stosując otrzymane formuły.
Przykład
x
1
x
2
x
3
x
4
x
5
x
6
Podsystem II
Podsystem I
Otrzymujemy teraz formuły
składowe
))
(t
(t)])(R
R
-
(t)][1
R
-
[1
-
(1
))
(t
(t)(R
R
(t)
R
6
II
I
6
II
-
I
s
(t)
(t)F
F
(t)
F
II
I
II
-
I
(t)
(t)R
(t)R
R
(t)
R
3
2
1
I
(t)
(t)R
R
(t)
R
5
4
II
)
(t)
R
-
1
(t)
F
:
uwaga
(
II
-
I
II
-
I
Obliczanie prawdopodobieństwa
zdatności systemu
5. Struktury z elementami prostymi odnawialnymi o
niezerowej odnowie
Jeśli pewne elementy (lub nawet wszystkie) są elementami
odnawialnymi, to stosujemy podstawienie
)
(
k
1
(t)
F
,
)
(
k
(t)
R
i
g
i
i
g
i
t
t
i-te elementy są
odnawialne
Ciąg dalszy Przykładu (jeśli elementy o numerach 1, 5 i 6 są
odnawialne, to system jest nieodnawialny (w końcu uszkodzą się
elementy 2, 3 oraz 4 i nie będzie dla dużych t żadnej ścieżki
zdatności o zdatnych wszystkich elementach). Podsystemy I i II
są obiektami nieodnawialnymi. Zatem system jest nieodna-
wialny i liczymy dla niego charakterystyki (np. R
s
(t) ) jak dla
obiektu nieodna-wialnego
))
(t
(t)])(k
R
-
(t)][1
R
-
[1
-
(1
))
(t
(t)(k
R
(t)
R
6
g
II
I
6
g
II
-
I
s
(t)
(t)F
F
(t)
F
II
I
II
-
I
(t)
(t)R
(t)R
k
(t)
R
3
2
1
g
I
(t)
(t)k
R
(t)
R
5
g
4
II
Obliczanie prawdopodobieństwa
zdatności systemu
W przypadku, gdy mamy do czynienia z identycznymi w
sensie rozkładu elementami ( R(t) = R
i
(t), i=1..n ) to wiele
formuł upraszcza się znacznie.
1. Struktury szeregowe o identycznych elementach
n
S
n
S
F(t)
-
1
1
(t)
F
,
R(t)
(t)
R
2. Struktury równoległe o identycznych elementach
n
S
n
S
R(t)
-
1
1
(t)
R
,
F(t)
(t)
F
3. Struktury progowe
n
k
i
i
n
i
s
s
t
F
t
R
i
n
t
T
P
(t)
R
Wzór ten dla struktur „n-1 z n” upraszcza się do postaci
n
1
-
n
s
t
R
1)
-
(n
t
R
n
(t)
R
Systemy o jednakowych elementach
Założenia: elementy dwustanowe w sensie niezawodności o
wykładniczych rozkładach czasów poprawnej pracy i odnowy
(model
Markowa);
system
wielostanowy
w
sensie
niezawodności, a jego stany definiowane są stanami elementów.
Dowolny stan systemu opisany jest stanami jego elementów,
czyli wektorem:
n
i
1
x
,...,
x
,...,
x
x
Poszczególne, zdefiniowane wcześniej stany niezawodnościowe
systemu stanowią podzbiory stanów jego elementów, czyli
podzbiory wektorów x. Zatem przechodzenie procesu zmian
stanów
systemu
wynika
jednoznacznie
z
procesów
przechodzenia elementów pomiędzy swoimi stanami. Przy
założeniu o wykładniczym charakterze rozkładu czasu
przechodzenia do kolejnych stanów i przebywania w stanach
rozkłady łączne procesu zmian definiuje się za pomocą
macierzy intensywności przejść. W efekcie uzyskać można
metodą równań stanów charakterystyki chwilowe lub graniczne
prawdopodobieństw przebywania procesu w poszczególnych
stanach, z których z kolei wyznacza się kolejne istotne wartości
miar niezawodnościowych systemu.
Model systemu wielostanowego
w sensie niezawodności
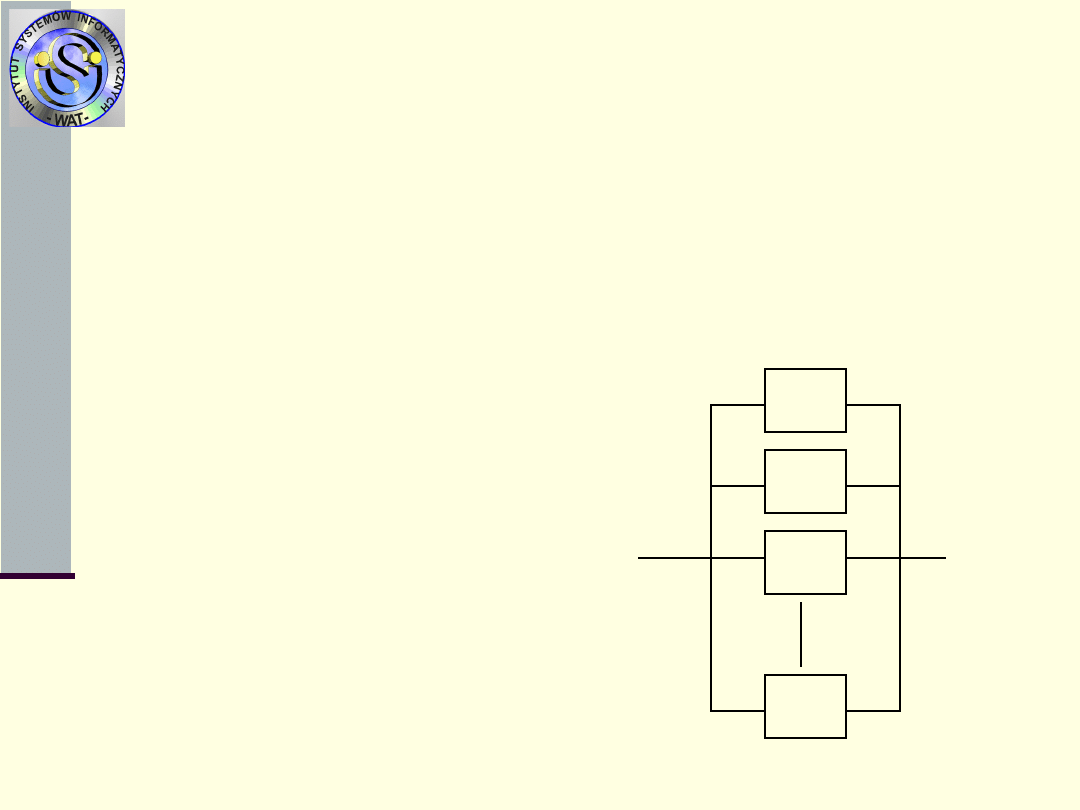
Metodę tę zilustrujemy przykładem.
Przykład System ma strukturę przedstawioną na schemacie
x
1
x
2
x
3
Czasy poprawnej pracy elementów
x
1
i x
2
mają rozkład wykładniczy z
parametrem a, elementu x
3
z
parametrem b natomiast wszystkie
czasy
odnowy
mają
rozkład
wykładniczy
z
parametrem
c.
Można zatem zdefiniować trzy stany
niezawodnościowe systemu:
Stan pełnej wydajności x
1
= (1,1,1), stany częściowej
wydajności x
2
= (0,1,1), x
3
= (1,0,1) oraz stan awarii x
4
=
(0,0,1), x
5
= (1,1,0), x
6
= (0,1,0), x
7
= (1,0,0), x
8
= (0,0,0).
Oznacza to, że elementy mogą uszkadzać się nawet po
uszkodzeniu systemu, chociaż nie trzeba czynić takiego
założenia. Wtedy po prostu liczba możliwych w realizacji
stanów zmniejszy się istotnie.
Uszkodzony element naprawiany jest przez jednego
konserwatora i najpierw zawsze naprawiany jest element
trzeci (jeśli jest uszkodzony), a następnie któryś z elementów
pozostałych, załóżmy, że pierwszy.
Model systemu wielostanowego w sensie
niezawodności
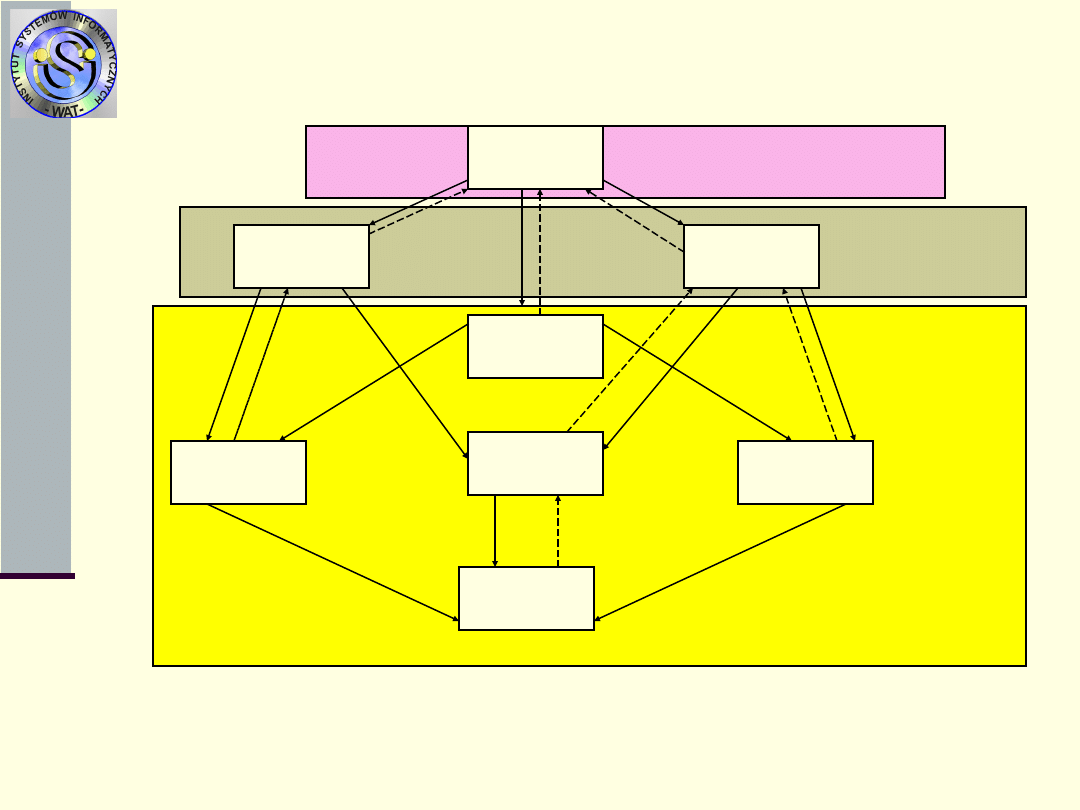
Daje to nam w efekcie następujący graf stanów procesu zmian
stanów elementów i systemu:
(1,1,
1)
(0,1,
1)
(1,0,
1)
(1,1,
0)
(0,0,
1)
(0,1,
0)
(0,0,
0)
(1,0,
0)
a
a
b
b
a
a
a
a
b
a
b
c
c
c
c
c
c
Pełna
wydajność
Częściowa
wydajność
Stan awarii
Uwaga:intensywności (pętle) na wierzchołkach grafu to minus suma
intensywności wychodzących z wierzchołka.
Model systemu wielostanowego w sensie
niezawodności
a
c
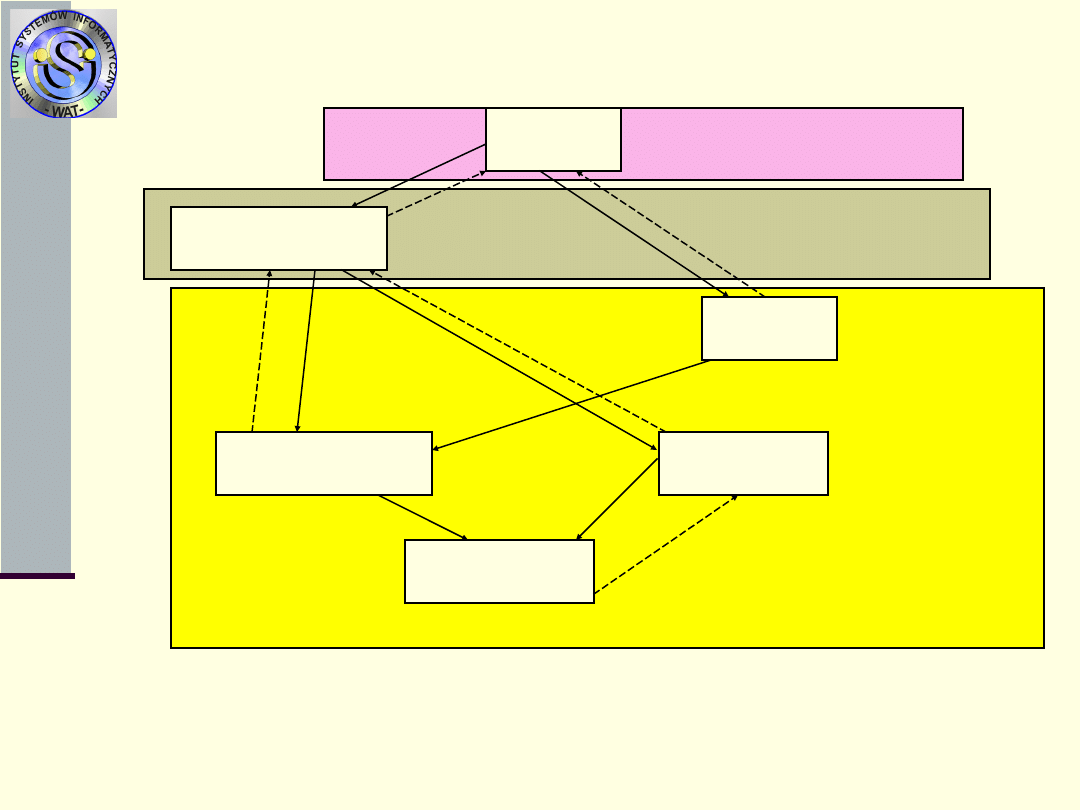
(1,1,
1)
(0,1,1),
(1,0,1)
(1,1,
0)
(0,0,1)
2a
b
b
b
c
c
Pełna
wydajność
Częściowa
wydajność
Stan awarii
2a
c
stan1
stan2
stan4
stan5
(1,0,0),
(0,1,0)
(0,0,0)
stan3
stan6
c
c
a
a
Stany te można zredukować
Uwaga:intensywności (pętle) na wierzchołkach grafu to minus
suma intensywności wychodzących z wierzchołka.
Model systemu wielostanowego w sensie
niezawodności
b
Stąd układ równań różniczkowych stanu (Kołmogorowa) ma
postać :
(t)
cp
(t)
cp
(t)
b)p
a
2
(
(t)
p
dt
d
4
2
1
1
Zamiast jednego z równań (6) dajemy równanie normujące
postaci
(t)
cp
(t)
cp
(t)
c)p
b
(a
-
(t)
p
a
2
(t)
p
dt
d
5
3
2
1
2
(t)
p
2
(t)
c)p
(a
-
(t)
bp
(t)
p
dt
d
4
3
2
3
a
(t)
c)p
a
2
(
(t)
bp
(t)
p
dt
d
4
1
4
1
(t)
p
(t)
p
(t)
p
(t)
p
(t)
p
(t)
p
6
5
4
3
2
1
(t)
cp
(t)
c)p
(b
-
(t)
ap
(t)
p
dt
d
6
5
2
5
)
0
,
0
,
0
,
0
,
0
,
1
(
(0))
p
(0),
p
(0),
p
(0),
p
(0),
p
(0),
(p
p(0)
6
5
4
3
2
1
oraz
warunek
początkow
y
Model systemu wielostanowego w sensie
niezawodności
1
p
p
p
p
p
p
6
5
4
3
2
1
Równania te można rozwiązać stosując transformatę Laplace’a.
Otrzymujemy wtedy wektor p(t)=(p
1
(t), p
2
(t), p
3
(t), p
4
(t), p
5
(t),
p
6
(t))
będący
podstawa
obliczania
charakterystyk
niezawodnościowych wielostanowego w sensie niezawodności
systemu.
Chcąc
uzyskać
charakterystyki
graniczne
przekształcamy uzyskany układ równań (gdzie p
i
= lim p
i
(t)
i=1..6) do postaci:
5
3
2
1
cp
cp
c)p
b
(a
-
p
a
2
0
4
3
2
p
2
c)p
(a
-
bp
0
a
4
1
c)p
a
2
(
bp
0
6
5
2
cp
c)p
(b
-
ap
0
z warunkiem
normującym
3
2
1
cp
cp
b)p
a
2
(
0
Ten układ równań liniowych można rozwiązać np. metodą
Gaussa. Otrzymujemy wtedy wektor p=(p
1
, p
2
, p
3
, p
4
, p
5
, p
6
)
granicznych prawdopo-dobieństw będący podstawa obliczania
granicznych
charakterystyk
nieza-wodnościowych
wielostanowego w sensie niezawodności systemu.
Model systemu wielostanowego w sensie
niezawodności
Należy zawsze dokonać identyfikacji wszystkich
elementów - czy są odnawialne, czy nie; jakie są
ich rozkłady prawdopodobieństwa czasu życia
lub (o ile jest to potrzebne) czasów odnowy, itp.,
należy zbadać ścieżki zdatności i cięcia systemu;
duża liczba ścieżek świadczy o odporności
systemu, a duża liczba cięć świadczy o
wrażliwości systemu; odnosi się to w dużej
mierze do odporności systemu na uszkodzenia
pojedynczych elementów,
należy
ustalić,
czy
system
jest
obiektem
nieodnawialnym,
czy
odnawialnym;
miary
niezawodności obliczane dla systemu muszą być
charakterystyczne dla ustalonej klasy systemu -
obiektu.
Wnioski końcowe
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
Wyszukiwarka
Podobne podstrony:
wyklad 3 MNE
wyklad 8 MNE
wyklad 9 MNE
wyklad 4 MNE
wyklad 7 MNE
wyklad 2 MNE
wyklad 2 MNE
wyklad 3 MNE
wyklad 6 MNE
więcej podobnych podstron