Rozproszona pamięć
Rozproszona pamięć
współdzielona
współdzielona
(ang. distributed shared
(ang. distributed shared
memory)
memory)
Rozproszone
Rozproszone
systemy operacyjne
systemy operacyjne

Ogólna charakterystyka DSM
Ogólna charakterystyka DSM
Cel stosowania DSM
Dostarczenie abstrakcji w postaci wspólnej wirtualnej przestrzeni
adresowej, potencjalnie dostępnej dla wszystkich węzłów
systemu rozproszonego.
Zalety:
wygodny dla programisty paradygmat programowania
równoległego (nie ma konieczności przekazywania
komunikatów),
skalowalność i łatwość rozbudowy,
dostępność wirtualnej przestrzeni adresowej obejmującej
pamięci fizyczne wszystkich węzłów,
możliwość uruchomienia w środowisku rozproszonym
programów równoległych zaprojektowanych dla środowisk
wieloprocesorowych z pamięcią współdzieloną.
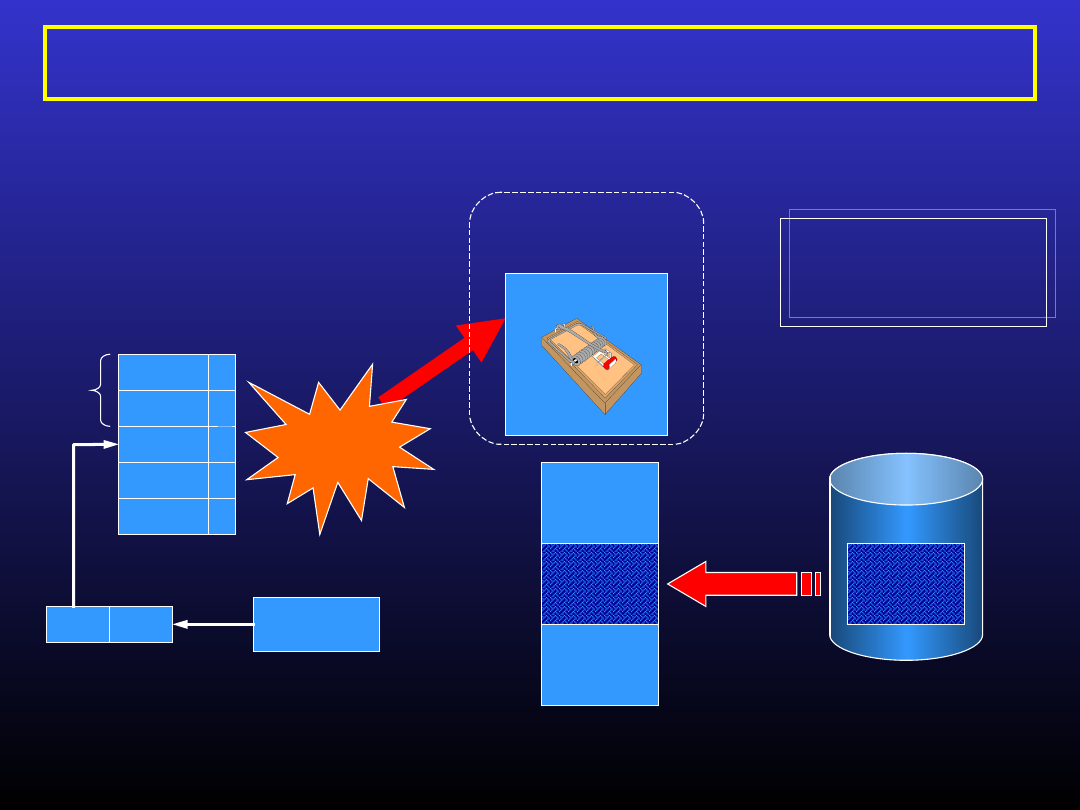
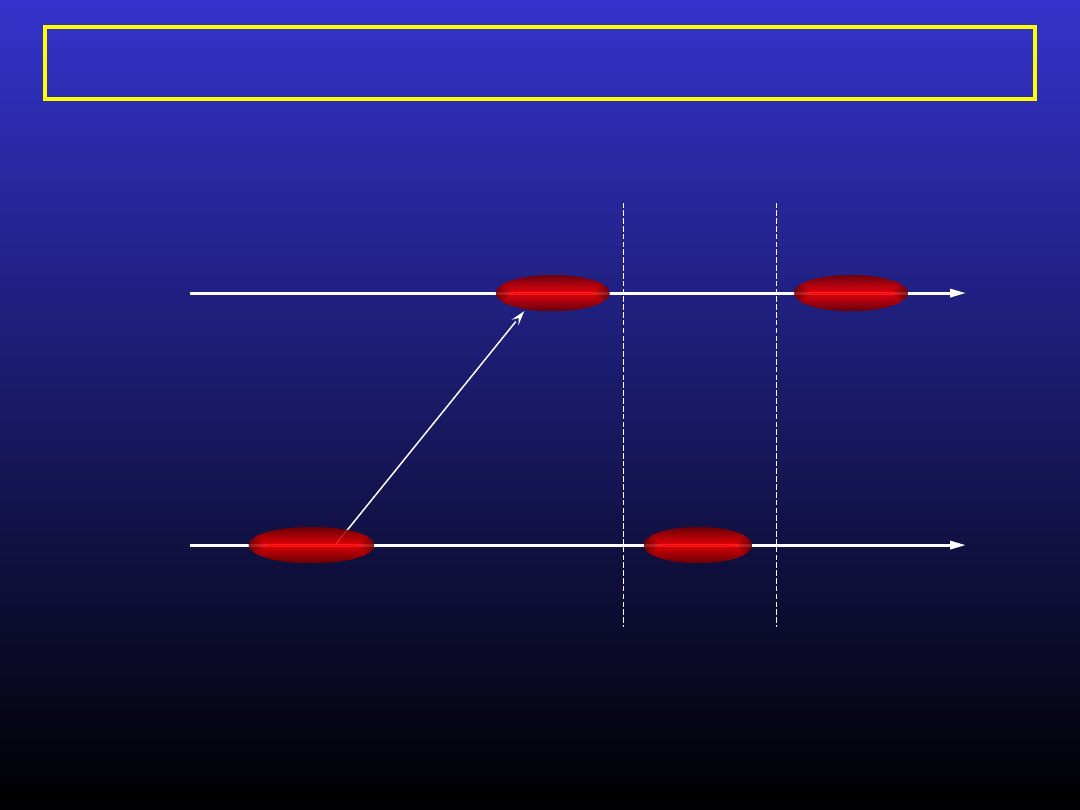
Obsługa błędu strony w systemie pamięci
Obsługa błędu strony w systemie pamięci
wirtualnej
wirtualnej
procesor
adres
logiczny
s o
s
s — numer strony
r — numer ramki
o — przesunięcie
s — numer strony
r — numer ramki
o — przesunięcie
tablica
stron
n
urządzenie
wymiany
pamięć
pułapka
system
operacyjny
p
błąd
strony
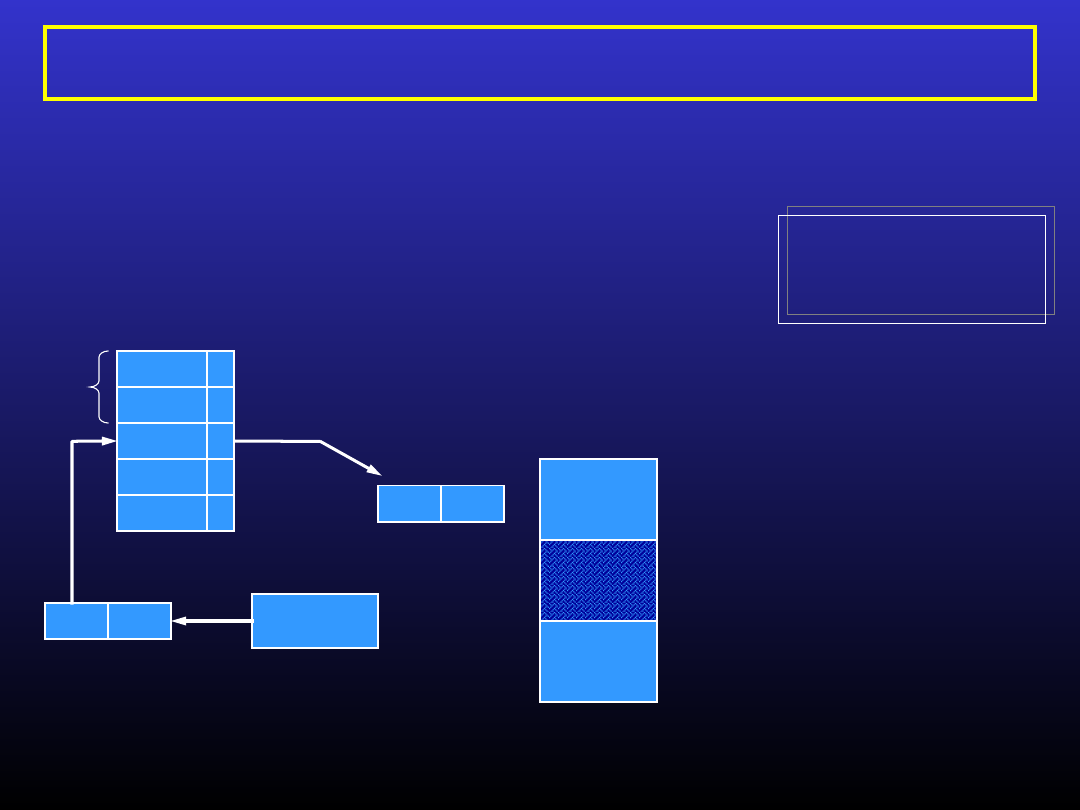
Obsługa błędu strony w systemie pamięci
Obsługa błędu strony w systemie pamięci
wirtualnej
wirtualnej
procesor
adres
logiczny
s o
adres
fizyczny
r o
s
s — numer strony
r — numer ramki
o — przesunięcie
s — numer strony
r — numer ramki
o — przesunięcie
tablica
stron
p
pamięć
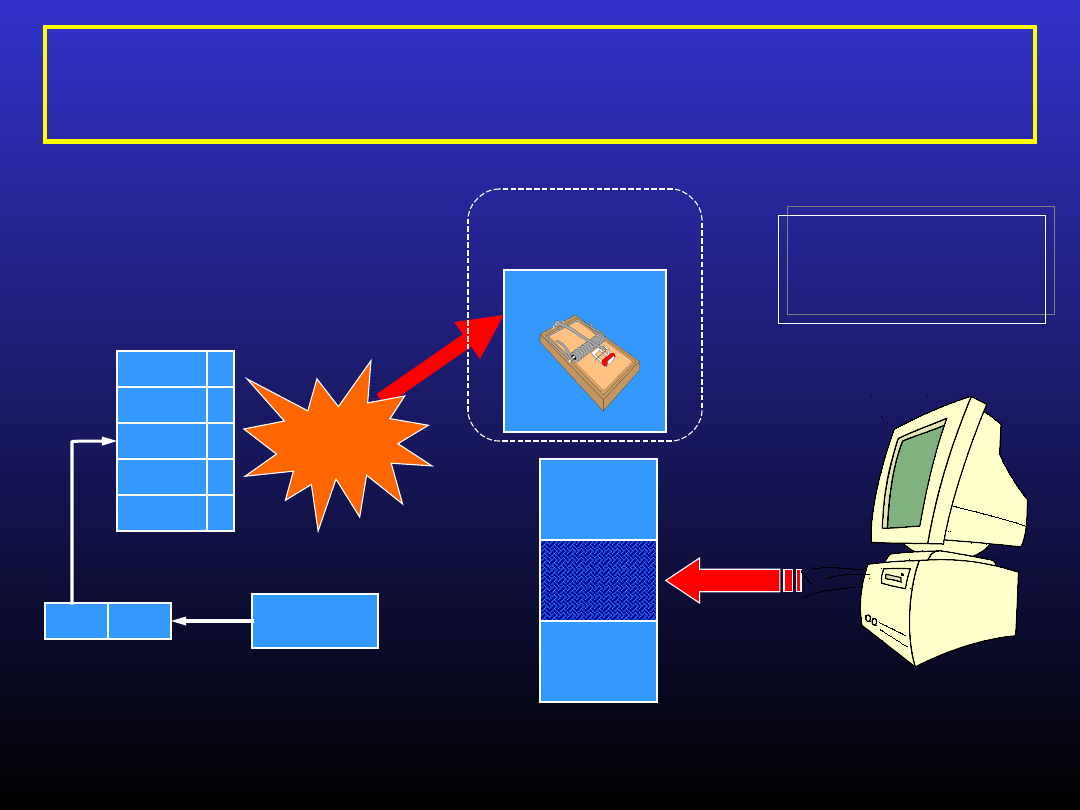
Obsługa błędu strony w systemie wirtualnej
Obsługa błędu strony w systemie wirtualnej
pamięci rozproszonej
pamięci rozproszonej
procesor
adres
logiczny
s o
s
s — numer strony
r — numer ramki
o — przesunięcie
s — numer strony
r — numer ramki
o — przesunięcie
tablica
stron
n
pamięć
pułapka
system
operacyjny
n
błąd
strony

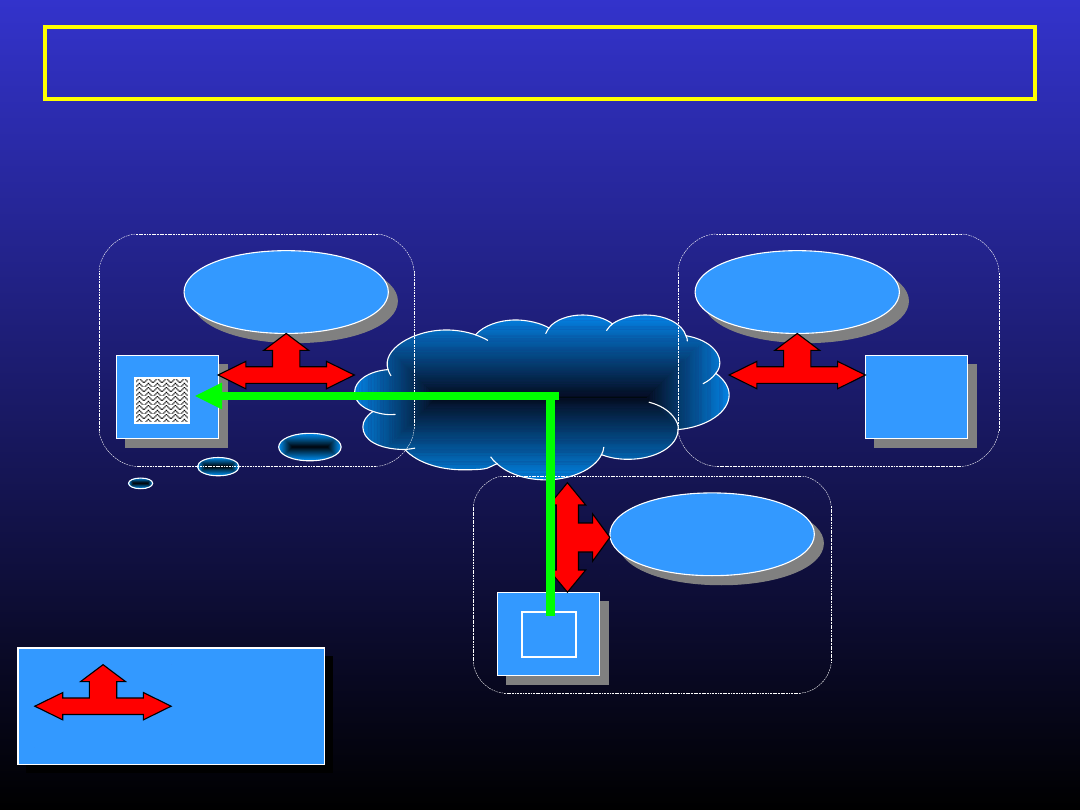
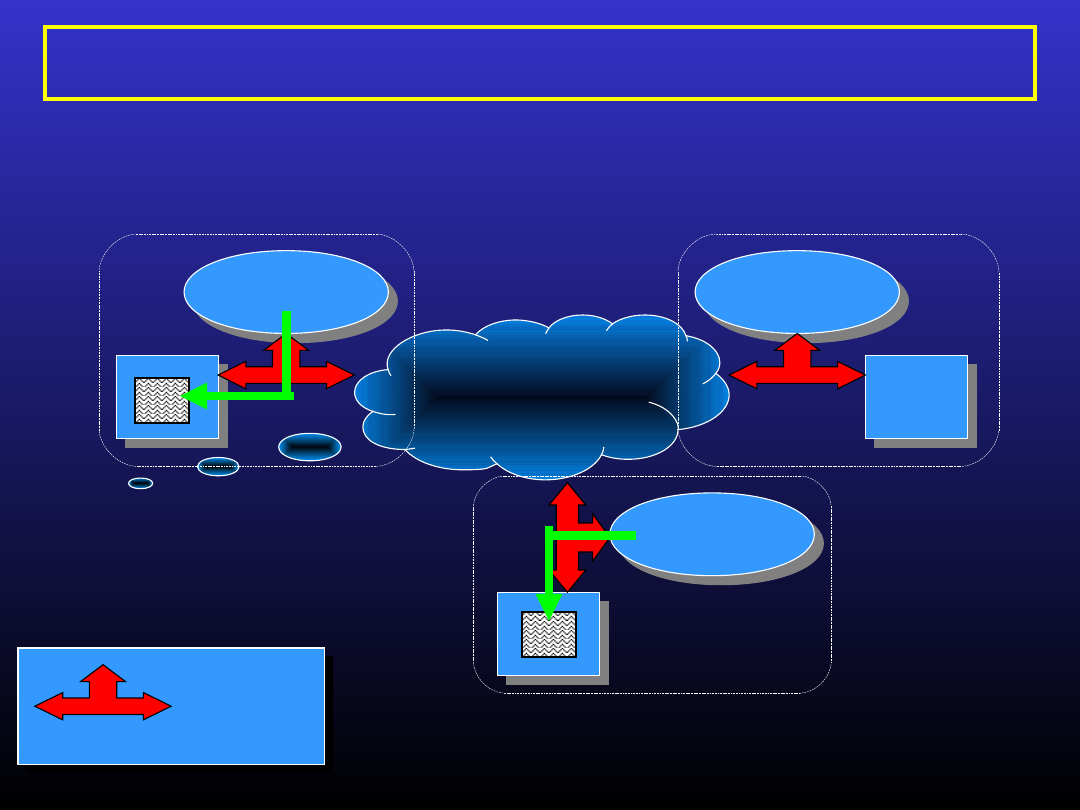
Koncepcje dostępu do danych
Koncepcje dostępu do danych
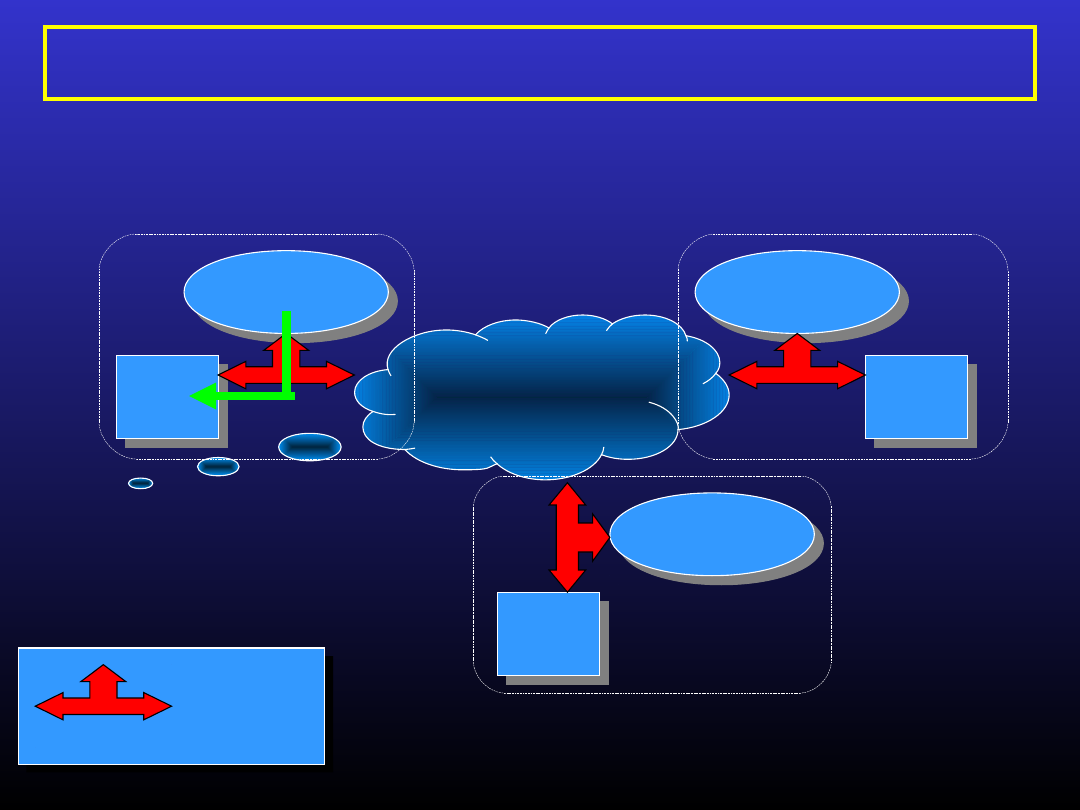
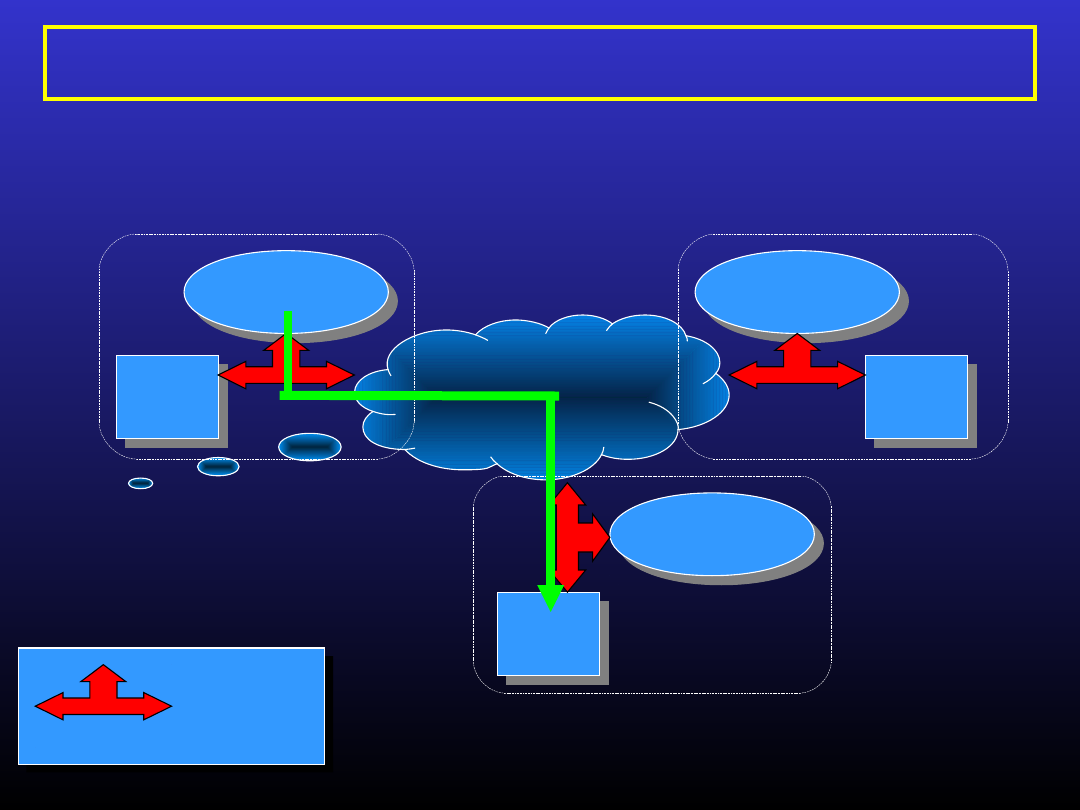
Dostęp zdalny – każdy dostęp do współdzielonego obiektu,
zlokalizowanego fizycznie w pamięci lokalnej innego węzła,
odbywa się przez sieć.
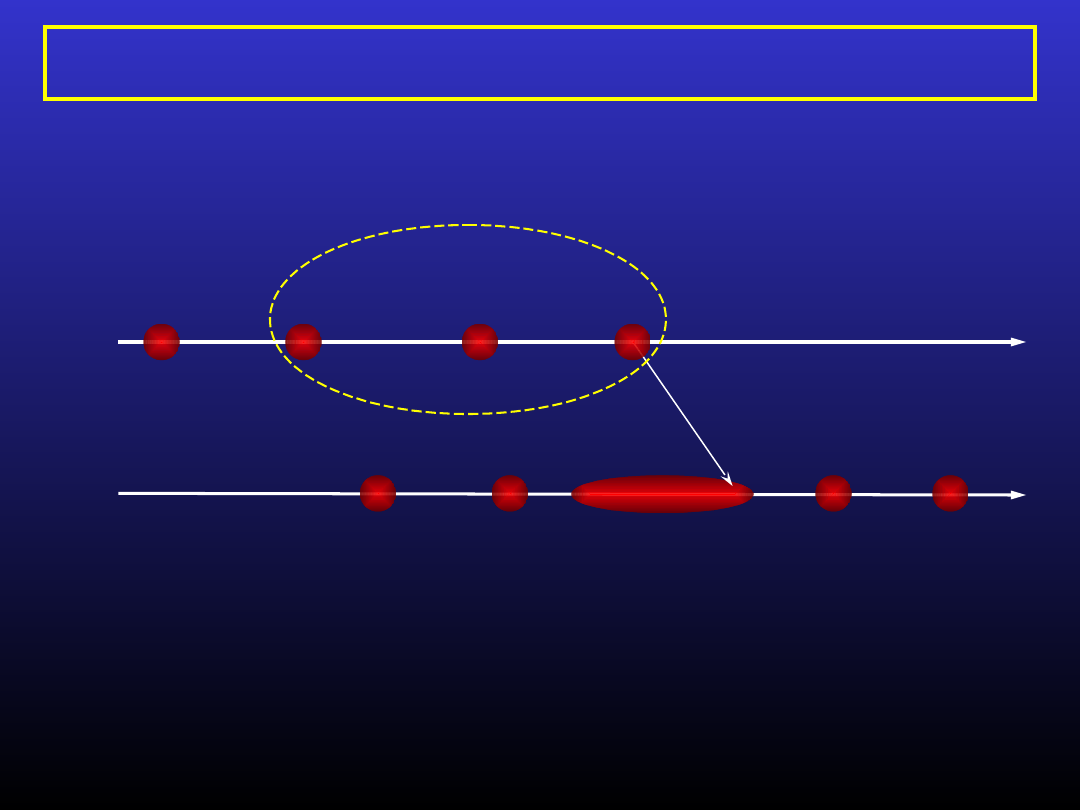
Relokacja – możliwa jest zmiana fizycznej lokalizacji
współdzielonego obiektu, czyli umieszczenie go w pamięci
lokalnej węzła, w którym pojawiło się żądanie dostępu.
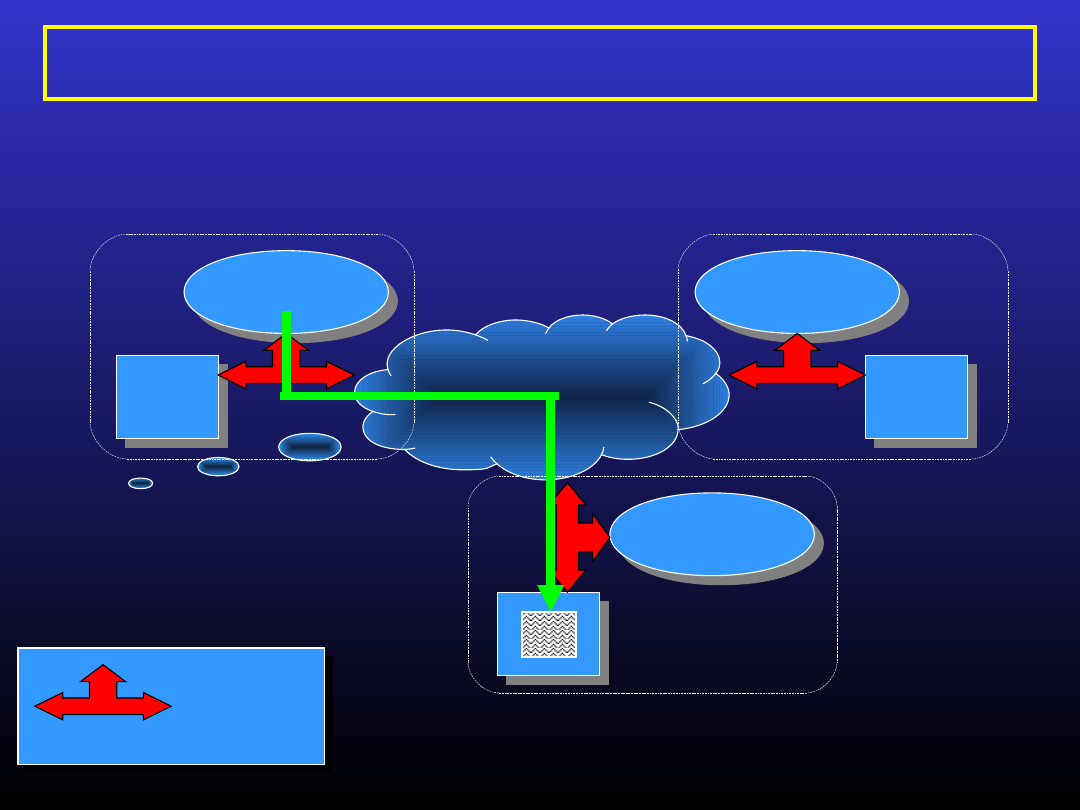
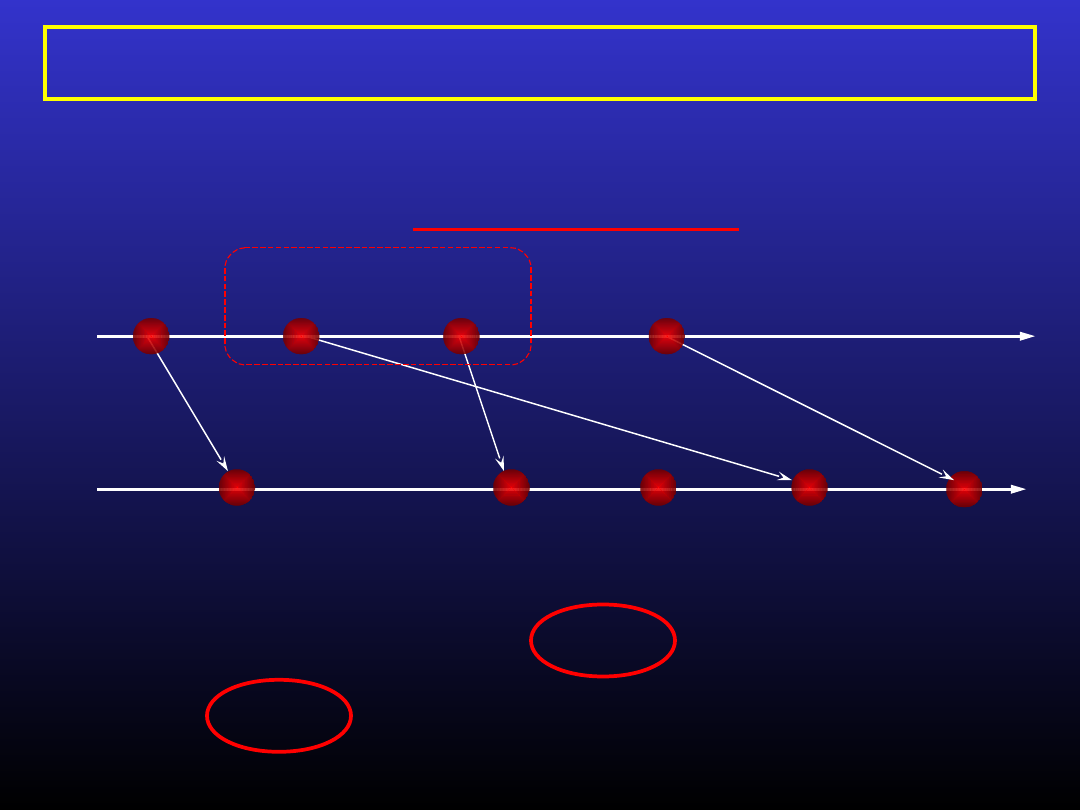
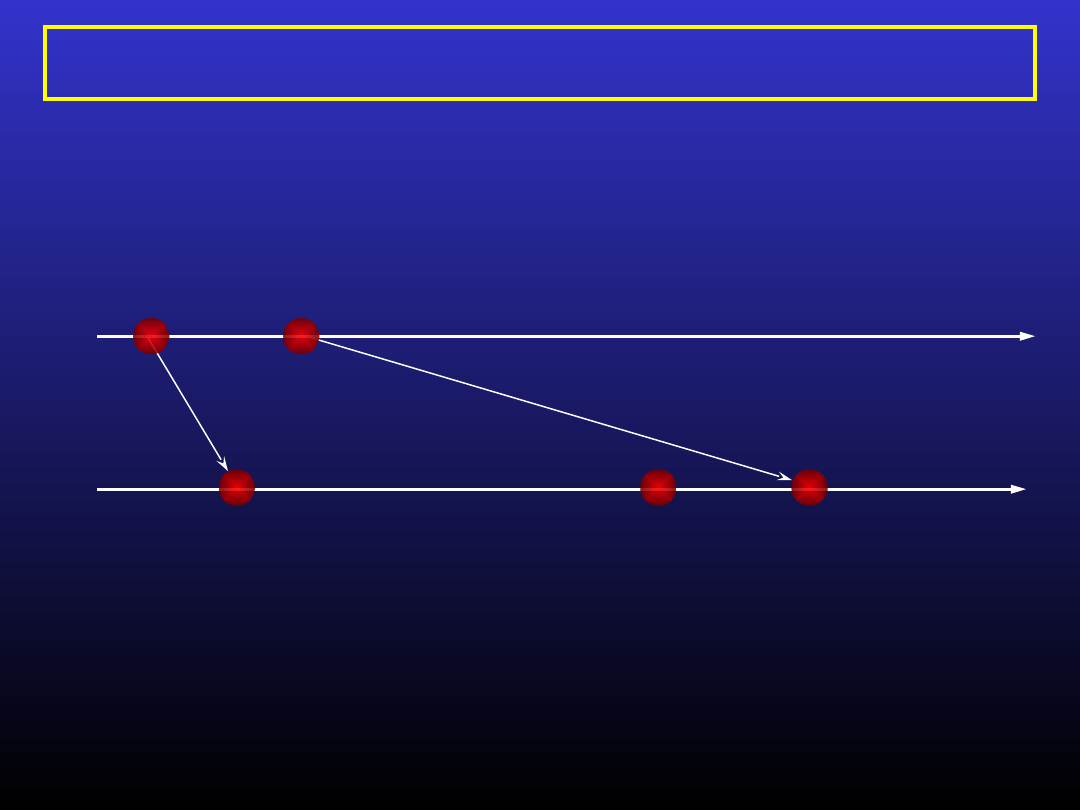
Replikacja – obiekt logiczny może być jednocześnie
zlokalizowany fizycznie w pamięci lokalnej wielu węzłów, co
umożliwia równoległy dostęp do tego obiektu w wielu
węzłach.
Dostęp lokalny
Dostęp lokalny
sieć
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
w
ę
ze
ł
w
ę
z
e
ł
węzeł
zarządc
a DSM
Dostęp zdalny
Dostęp zdalny
sieć
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
w
ę
ze
ł
w
ę
z
e
ł
węzeł
zarządc
a DSM
Zdalny dostęp – charakterystyka
Zdalny dostęp – charakterystyka
Stosunkowo prosta realizacja
Problem efektywności — duży
czas dostępu do danych w
zdalnych węzłach
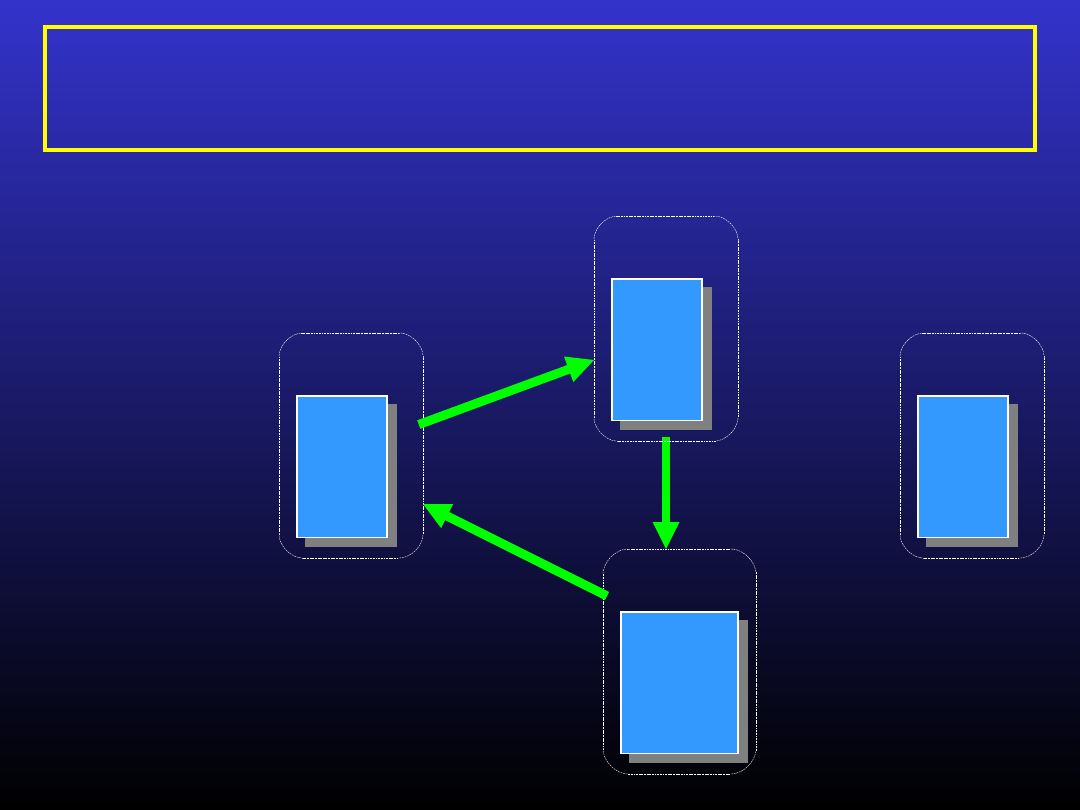
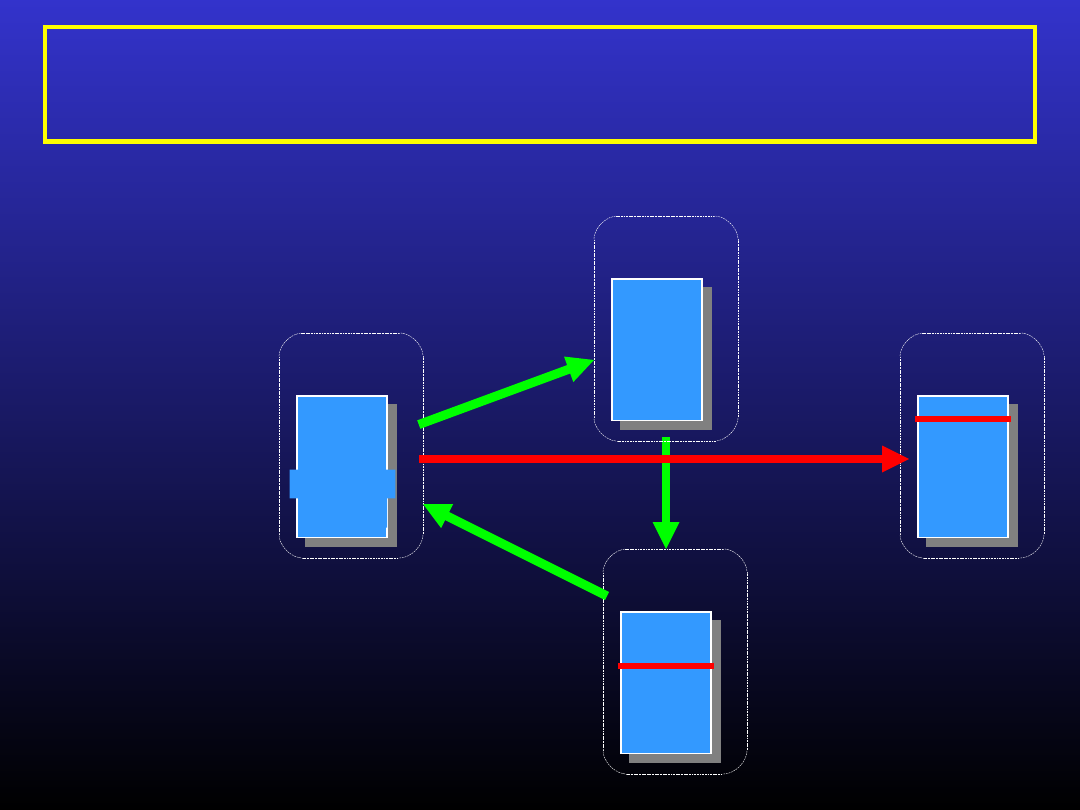
Relokacja
Relokacja
sieć
procesor
procesor
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
w
ę
ze
ł
w
ę
z
e
ł
węzeł
zarządc
a DSM
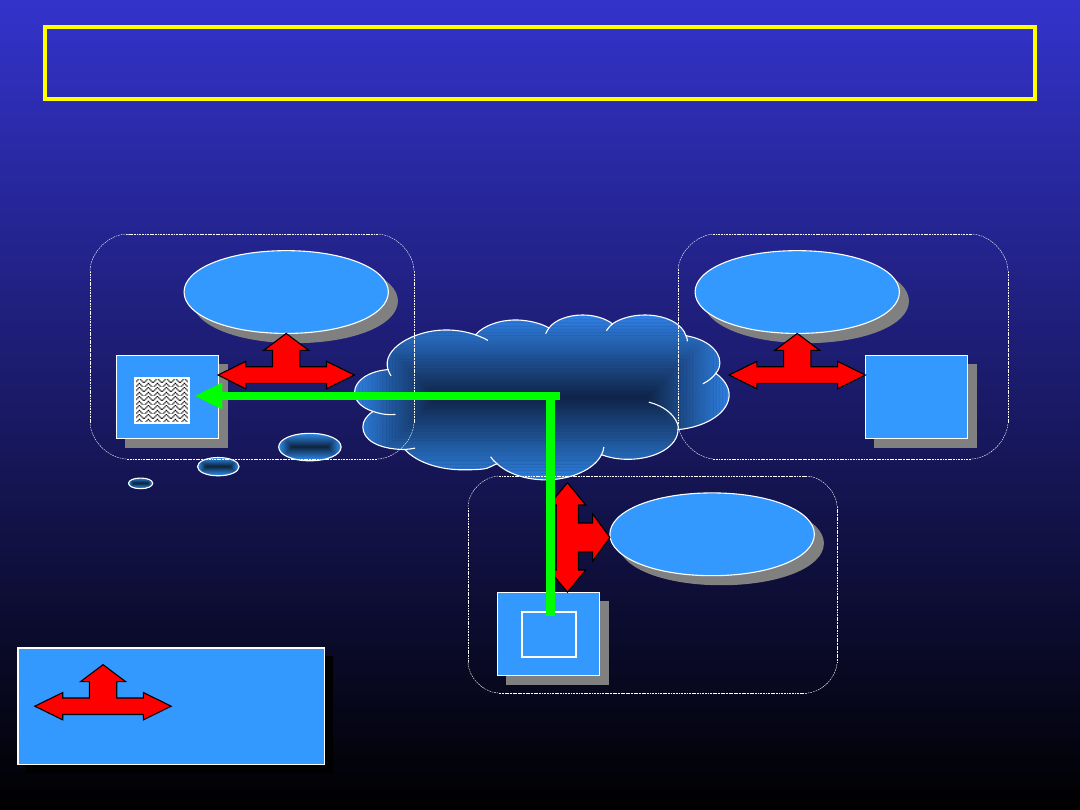
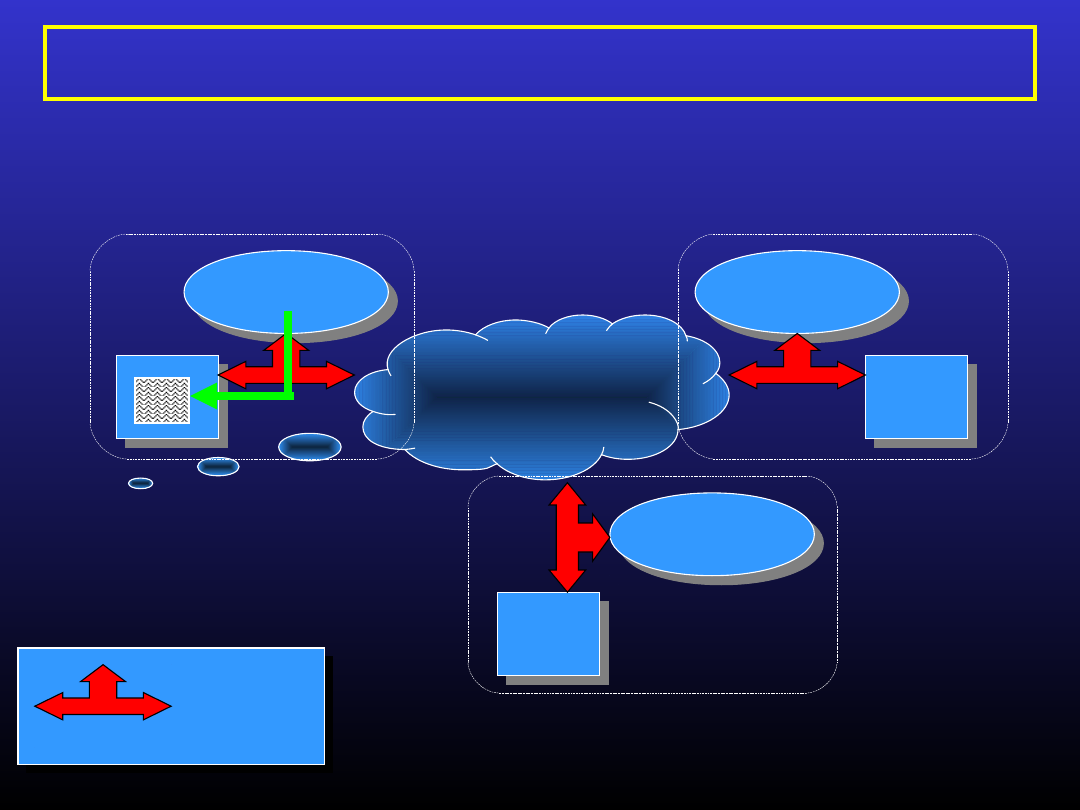
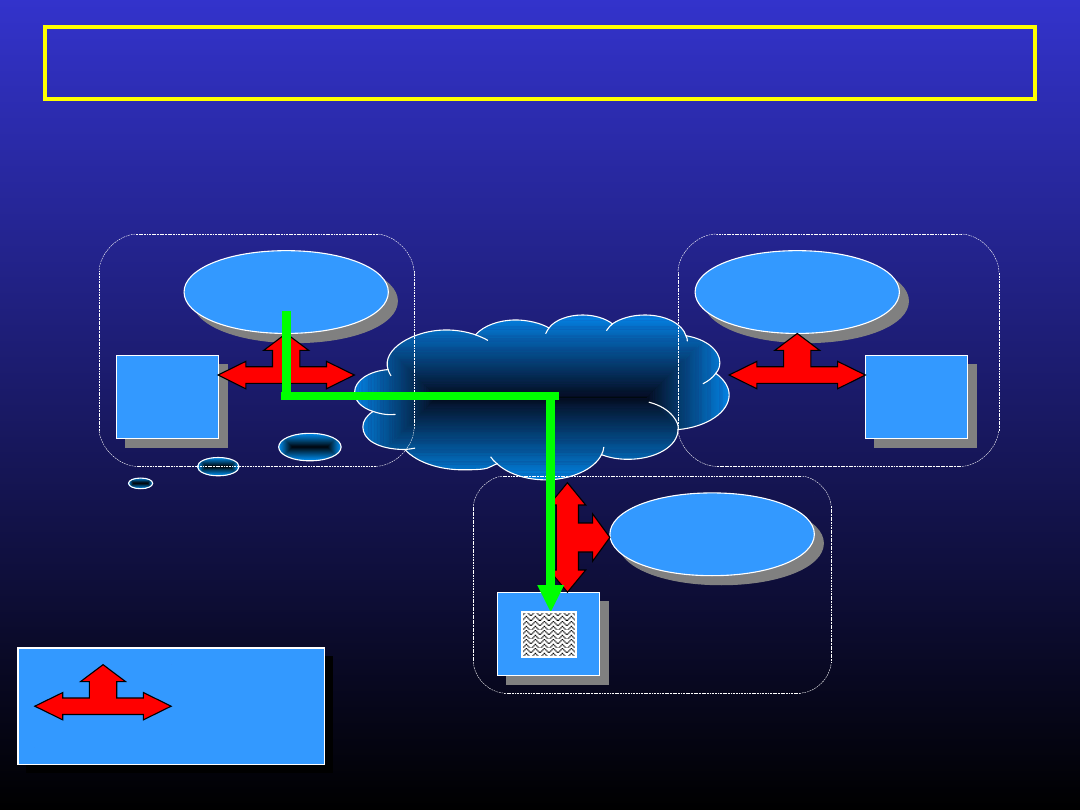
Relokacja
Relokacja
sieć
procesor
procesor
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
w
ę
ze
ł
w
ę
z
e
ł
węzeł
zarządc
a DSM
Relokacja
Relokacja
sieć
procesor
procesor
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
w
ę
ze
ł
w
ę
z
e
ł
węzeł
zarządc
a DSM
Relokacja – charakterystyka
Relokacja – charakterystyka
Problem lokalizacji
Problem rozmiaru i struktury
jednostki podlegającej relokacji
Problem migotania (ang.
trashing,
ping-pong effect)
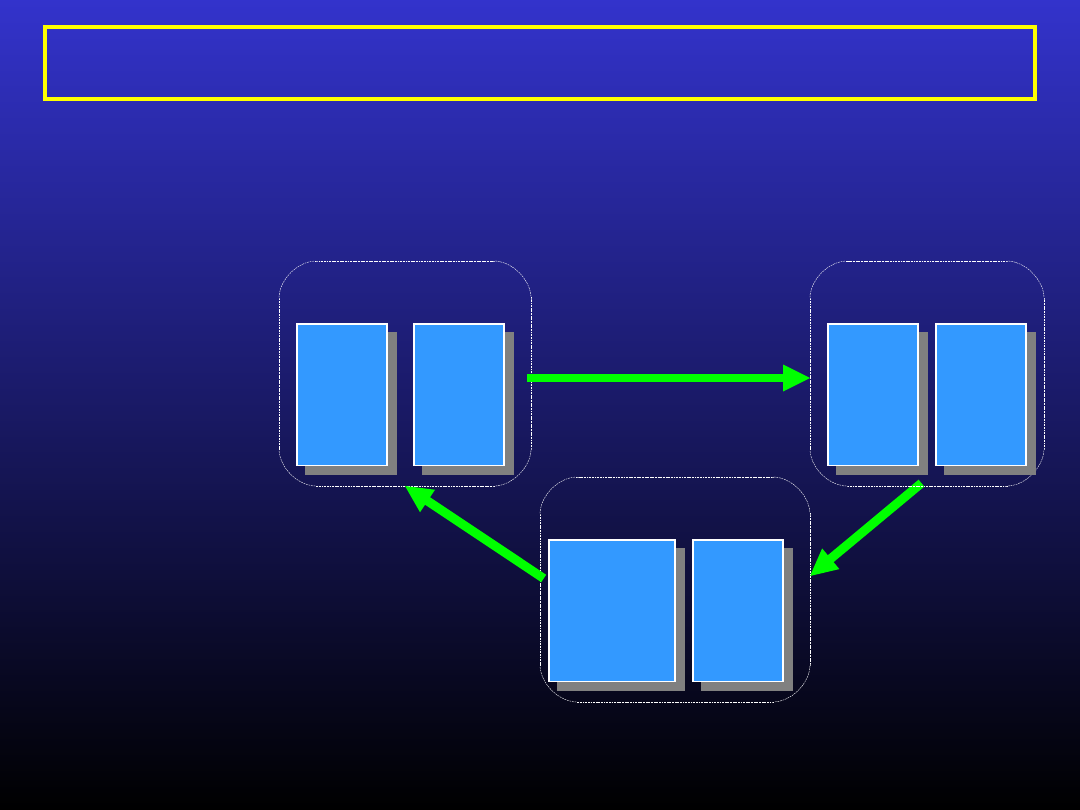
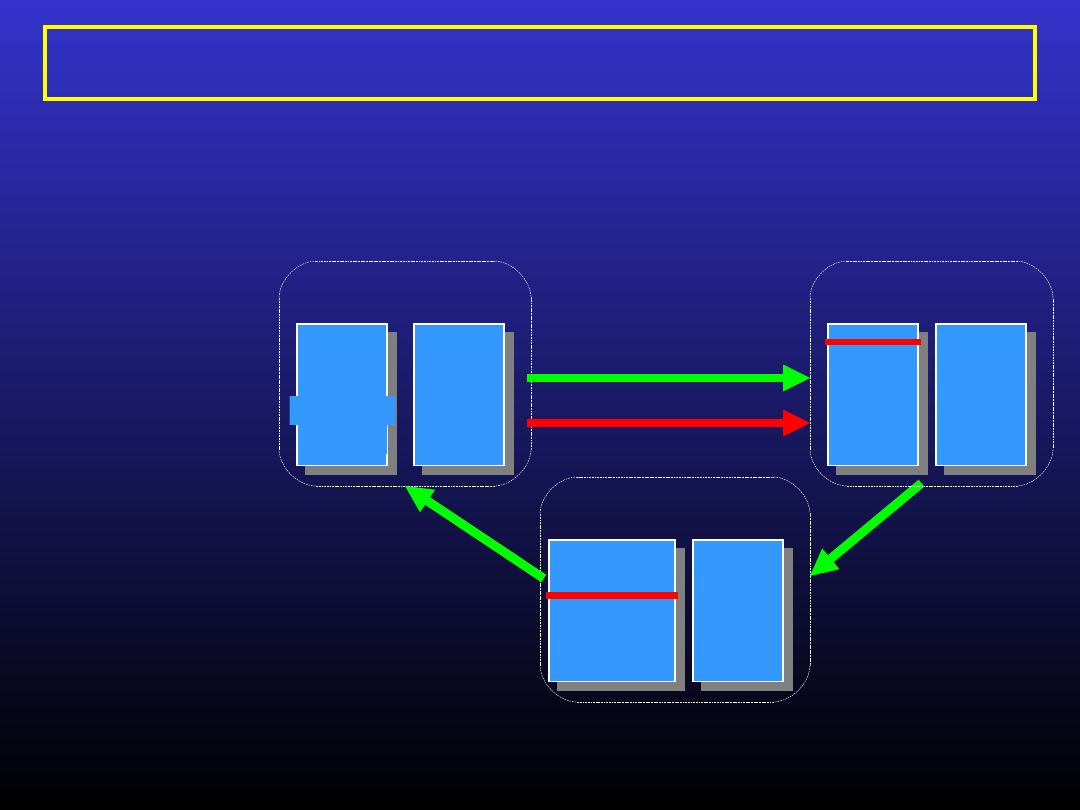
Replikacja
Replikacja
sieć
procesor
procesor
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
w
ę
ze
ł
w
ę
z
e
ł
węzeł
zarządc
a DSM
Replikacja
Replikacja
sieć
procesor
procesor
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
w
ę
ze
ł
w
ę
z
e
ł
węzeł
zarządc
a DSM
Replikacja
Replikacja
sieć
procesor
procesor
procesor
procesor
pamię
ć
lokaln
a
pamię
ć
lokaln
a
procesor
procesor
w
ę
ze
ł
w
ę
z
e
ł
węzeł
zarządc
a DSM
Replikacja - charakterystyka
Replikacja - charakterystyka
Problem lokalizacji
Problem rozmiaru i struktury
jednostki podlegającej replikacji
Problem migotania
(ang. trashing,
ping-pong effect)
Problem spójności
kopii (replik)

Struktura jednostki podlegającej replikacji
Struktura jednostki podlegającej replikacji
lub relokacji
lub relokacji
Strona – fizyczne połączenie kilku odrębnych obiektów
logicznych w jedną jednostkę udostępnianą jako całość
przez DSM (problem fałszywego współdzielenia).
Pojedyncza zmienna – duży jednostkowy koszt relokacji i
utrzymywania spójności.
Obiekt (hermetyczna struktura danych udostępniana tylko
przez zdefiniowane metody) – możliwość optymalizacji w
strategii utrzymywania spójności w związku ze ściśle
określonym sposobem dostępu (poprzez metody).
Fałszywe współdzielenie
Fałszywe współdzielenie

Problem spójności replik - protokół
Problem spójności replik - protokół
koherencji
koherencji
Protokół unieważniania danych (ang. invalidation protocol)
– niespójne repliki są usuwane z pamięci lokalnej.
Protokół aktualizacji danych (ang. update protocol) –
niespójne repliki są aktualizowane.

Problem lokalizacji stron – system
Problem lokalizacji stron – system
IVY
IVY
Statyczny scentralizowany mechanizm lokalizacji stron –
jeden zarządca stron.
Statyczny rozproszony mechanizm lokalizacji stron –
identyfikacja zarządcy na podstawie numeru strony.
Dynamiczny mechanizm lokalizacji stron – bazuje na
informacji o prawdopodobnych właścicielach stron. W razie
błędu strony wysyłane jest żądanie do prawdopodobnego
właściciela strony. Jeżeli odbiorca żądania nie jest
właścicielem strony, to przekazuje on żądanie do swojego
prawdopodobnego właściciela strony.

Podstawowe pojęcia i struktury danych –
Podstawowe pojęcia i struktury danych –
system
system
IVY
IVY
Właściciel strony – węzeł, na którym była wykonywana
ostatnia operacja zapisu danej strony.
Zbiór kopii (copyset) – zawiera identyfikatory węzłów
posiadających kopię strony (przechowywana przez właściciela
strony).
Zarządca (w podejściu statycznym) – węzeł, który przechowuje
dane o właścicielach poszczególnych stron.
Tablica właścicieli stron – dla każdej strony zawiera
identyfikator jej właściciela (przechowywany przez zarządców).
Prawdopodobny właściciel (w podejściu dynamicznym) –
tablica zawierająca dla każdej strony w systemie identyfikator
węzła, o którym wiadomo, że był kiedyś (lub jeszcze jest)
właścicielem danej strony; przechowywana przez każdy węzeł.
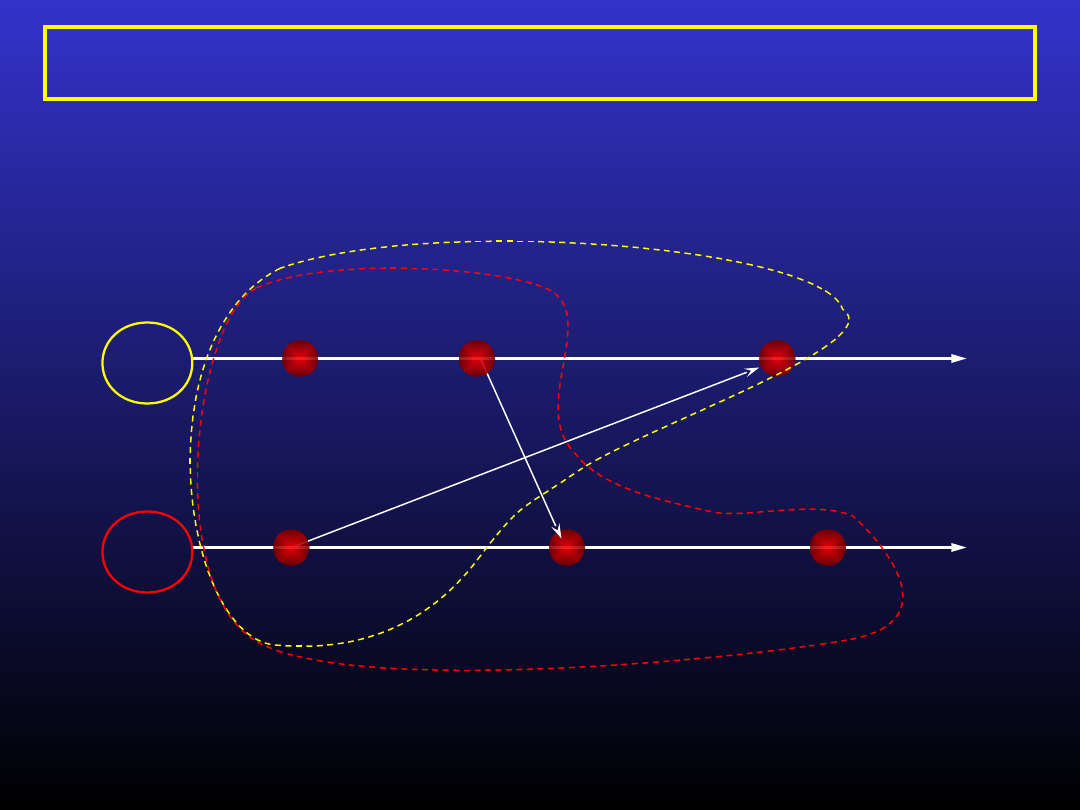
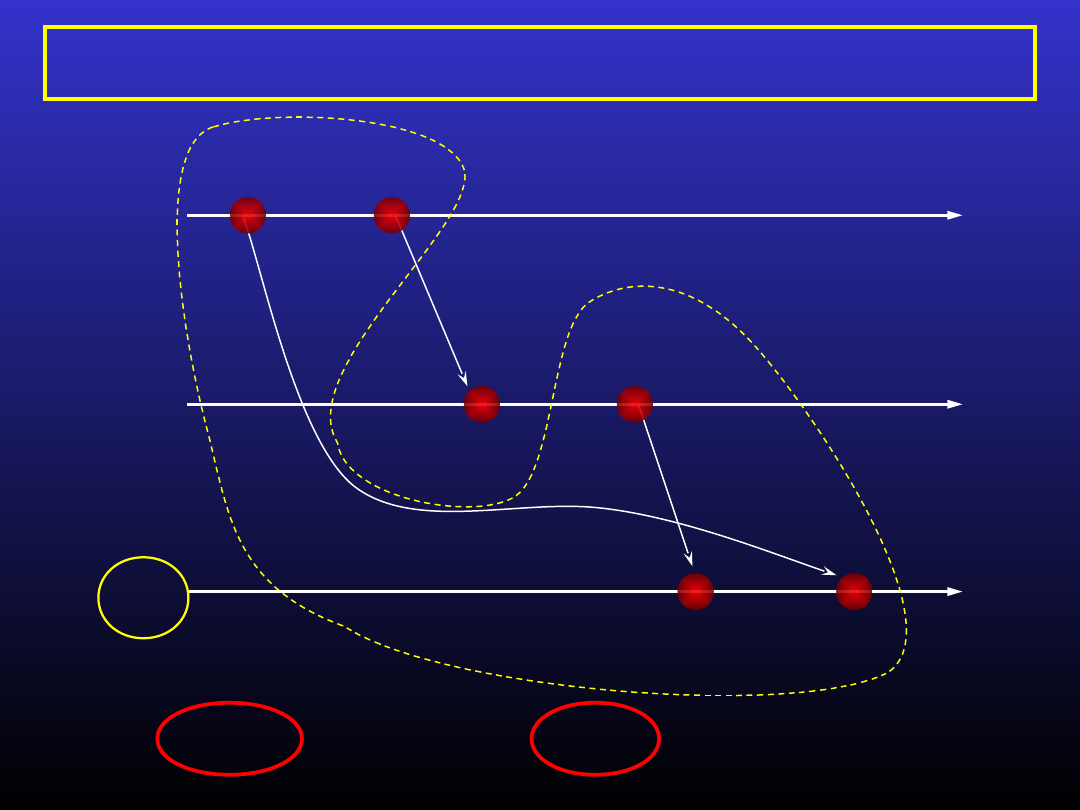
Statyczny scentralizowany mechanizm
Statyczny scentralizowany mechanizm
lokalizacji
lokalizacji
stron – odczyt
stron – odczyt
#1
{}
#2
{}
#1
{}
#2
{}
w
ę
ze
ł
A
#4
#4
w
ę
ze
ł
B
#3 {}
#4
{B}
#3 {}
#4
{B}
w
ę
ze
ł
C
#1 A
#2 A
#3 C
#4 C
#1 A
#2 A
#3 C
#4 C
za
rz
ą
d
c
a
A}
Odczyt strony #4:
1. uzyskanie
repliki
2. wykonanie
operacji
#4
Statyczny scentralizowany mechanizm
Statyczny scentralizowany mechanizm
lokalizacji
lokalizacji
stron – zapis
stron – zapis
#1
{}
#2
{}
#1
{}
#2
{}
w
ę
ze
ł
A
#4
#4
w
ę
ze
ł
B
#3
{}
#4
{B}
#3
{}
#4
{B}
w
ę
ze
ł
C
#1 A
#2 A
#3 C
#4 C
#1 A
#2 A
#3 C
#4 C
za
rz
ą
d
c
a
Zapis strony #4:
1. uzyskanie
własności
2. unieważnienie
repliki
#4 {B}
3. wykonanie
operacji
}
A
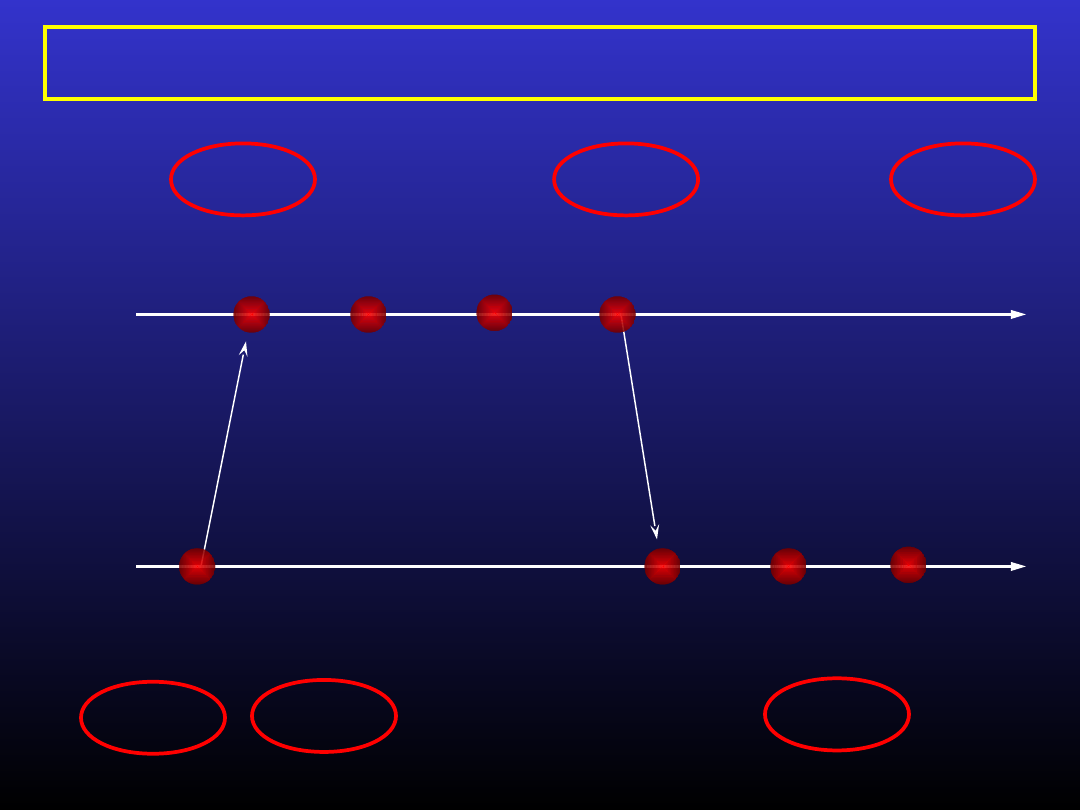
Dynamiczny mechanizm lokalizacji stron –
Dynamiczny mechanizm lokalizacji stron –
odczyt
odczyt
#1
{}
#2
{}
#1
{}
#2
{}
w
ę
ze
ł
A
#4
#4
w
ę
ze
ł
B
#3 {}
#4 {B}
#3 {}
#4 {B}
w
ę
ze
ł
C
#1 A
#2 A
#3 C
#4 B
#1 A
#2 A
#3 C
#4 B
A}
Odczyt strony #4:
1. uzyskanie
repliki
2. wykonanie
operacji
#4
#1 A
#2 A
#3 C
#4 C
#1 A
#2 A
#3 C
#4 C
#1 A
#2 A
#3 C
#4 C
#1 A
#2 A
#3 C
#4 C
C
Dynamiczny mechanizm lokalizacji stron –
Dynamiczny mechanizm lokalizacji stron –
zapis
zapis
#1
{}
#2
{}
#1
{}
#2
{}
w
ę
ze
ł
A
#4
#4
w
ę
ze
ł
B
#3 {}
#4 {B}
#3 {}
#4 {B}
w
ę
ze
ł
C
#1 A
#2 A
#3 C
#4 B
#1 A
#2 A
#3 C
#4 B
Zapis strony #4:
#1 A
#2 A
#3 C
#4 C
#1 A
#2 A
#3 C
#4 C
#1 A
#2 A
#3 C
#4 C
#1 A
#2 A
#3 C
#4 C
1. uzyskanie
własności
2. unieważnienie
repliki
3. wykonanie
operacji
A
#4 {B}
}
A
A

Model spójności
Model spójności
Model spójności określa gwarancje dotyczące
spójności replik, dawane aplikacji (równoległej)
przez system DSM.
Model spójności określa własności
Model spójności określa własności
gwarantowane przez system DSM
gwarantowane przez system DSM
W jaki sposób definiować model
spójności?
W jaki sposób określić gwarancje dla
aplikacji?
Kiedy i w jaki sposób egzekwować te
gwarancje?
???

Modele spójności replik
Modele spójności replik
Modele spójności przy dostępie ogólnym - swobodnym
(ang. general access consistency models) – doprowadzenie
do spójności replik realizowane jest przy każdej modyfikacji
DSM.
Modele spójności przy dostępie synchronizowanym
(ang. synchronisation access consistency models) –
doprowadzenie do spójności replik realizowane jest tylko
przy wykonywaniu operacji synchronizujących, które są
rozpoznawane przez system DSM.

Modele spójności przy dostępie ogólnym
Modele spójności przy dostępie ogólnym
(elementarne
(elementarne
)
)
Spójność atomowa (ang. atomic consistency)
Spójność sekwencyjna (ang. sequential consistency)
Spójność przyczynowa (ang. causal consistency)
Spójność PRAM (ang. pipelined RAM consistency)
Koherencja (ang. coherence)
Spójność procesorowa (ang. processor consistency)

Modele spójności przy dostępie
Modele spójności przy dostępie
synchronizowanym
synchronizowanym
Spójność słaba (ang. weak consistency)
Spójność zwalniania (ang. release consistency)
Spójność wejścia (ang. entry consistency)
Spójność zakresu (ang. scope consistency)

Definicja modeli spójności – podstawowe
Definicja modeli spójności – podstawowe
założenia
założenia
W skład systemu DSM wchodzą:
zbiór sekwencyjnych procesów P = {p
1
, p
2
, …, p
n
}
zbiór współdzielonych zmiennych X = {x
1
, x
2
, …}
Każdy proces ma własną replikę całego zbioru X
Proces p
i
może realizować na zmiennej x X dwie operacje:
zapisu wartości v – w
i
(x)v
odczytu wartości v – r
i
(x)v
Realizacja operacji przebiega w dwóch fazach:
żądanie operacji (ang. operation issue)
wykonanie operacji (ang. operation execution)
Definicja modeli spójności – oznaczenia
Definicja modeli spójności – oznaczenia
w
i
(x)v
operacja zapisu wartości v w zmiennej x, wykonana
przez proces p
i
r
i
(x)v
operacja odczytu wartości v zmiennej x, wykonana
przez proces p
i
O
zbiór wszystkich operacji w systemie
O
i
zbiór operacji procesu p
i
(żądanych przez p
i
)
OW
zbiór wszystkich operacji zapisu w systemie
O|x
zbiór wszystkich operacji na zmiennej x
i
lokalny porządek operacji procesu p
i
(lokalny porządek
zgłaszania żądań przez procesu p
i
)
przyczynowy porządek operacji procesu p
i
(przyczynowy porządek zgłaszania żądań przez
procesu p
i
)
i
porządek (uszeregowanie, ang. serialisation), zgodnie
z którym operacje postrzegane są przez proces p
i
(zgodnie z którym operacje wykonywane są na replice
procesu p
i
)

Definicja porządku przyczynowego
Definicja porządku przyczynowego
[
]
1,02
1, 2,
( 1
2
1
2)
( )
( )
( 1
2)
1
2
i
i
o
O
x X
o o o O
o
o
o
o
w x v
r x v
o
o o
o
o
o
�
�
�
"��
"
�
�"
ٮ
Definicja uszeregowania legalnego
Definicja uszeregowania legalnego
Uszeregowanie
i
jest legalne
v
x
r
u
x
o
v
x
w
v
u
v
x
r
v
x
w
i
i
OW
O
u
x
o
i
O
v
x
r
OW
v
x
w
i
i
)
(
)
(
)
(
)
(
)
(
)
(
)
(
,
)
(
UWAGA
W celu uproszczenia definicji zakłada się, że
każda operacja zapisu danej zmiennej zapisuje
unikalną wartość, co umożliwia identyfikowanie
operacji zapisu poprzez tą wartość.

Definicja historii
Definicja historii
Historia lokalna (procesu p
i
)
Zbiór uporządkowany h
i
= (O
i
,
i
), gdzie
i
jest relacją
porządku lokalnego.
Historia globalna
Zbiór uporządkowany h = (O, ), gdzie jest relacją porządku
przyczynowego.
Obraz historii h w procesie p
i
Zbiór uporządkowany hv
i
= (O
i
OW,
i
), gdzie
i
jest legalnym
uszeregowaniem.
Obraz historii h
Kolekcja obrazów poszczególnych procesów: hv = hv
1
, hv
2
, ...,
hv
n
.

Modele spójności — definicja spójności
Modele spójności — definicja spójności
sekwencyjnej
sekwencyjnej
Obraz hv historii h musi spełniać następujące warunki:
2
1
2
1
..
1
2
,
1
o
o
o
o
i
j
n
j
OW
O
o
o
i
1
2
2
1
..
1
..
1
2
,
1
w
w
w
w
i
n
i
i
n
i
OW
w
w
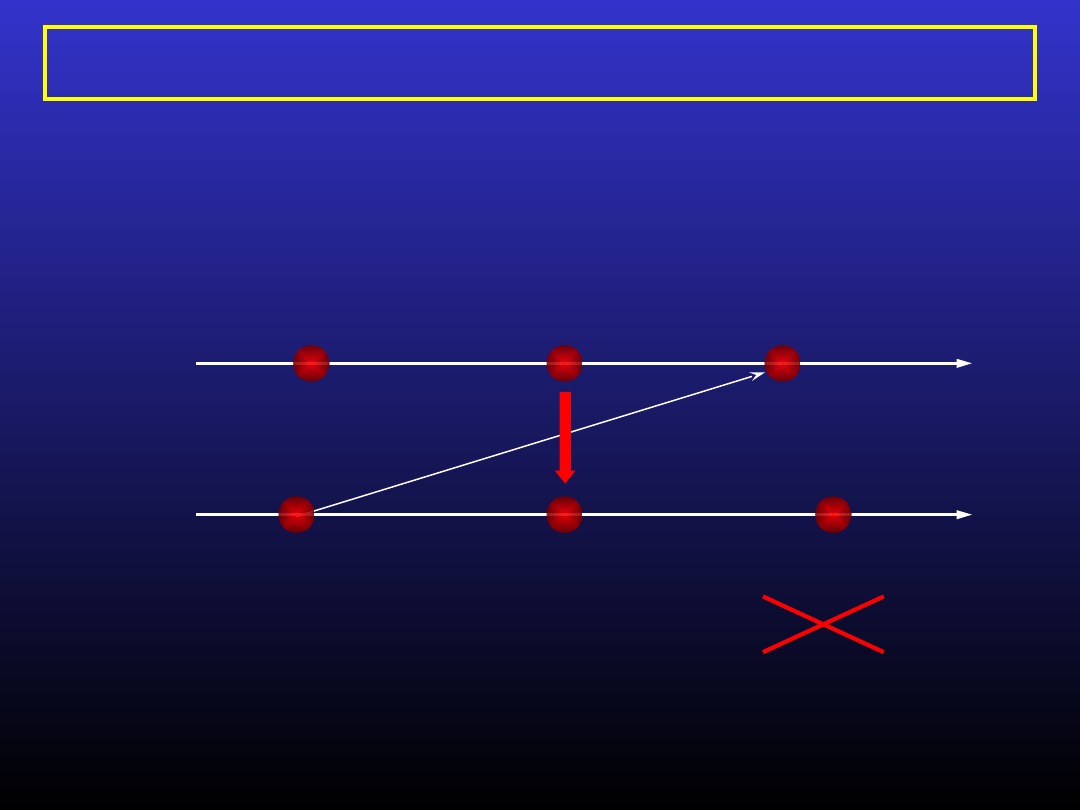
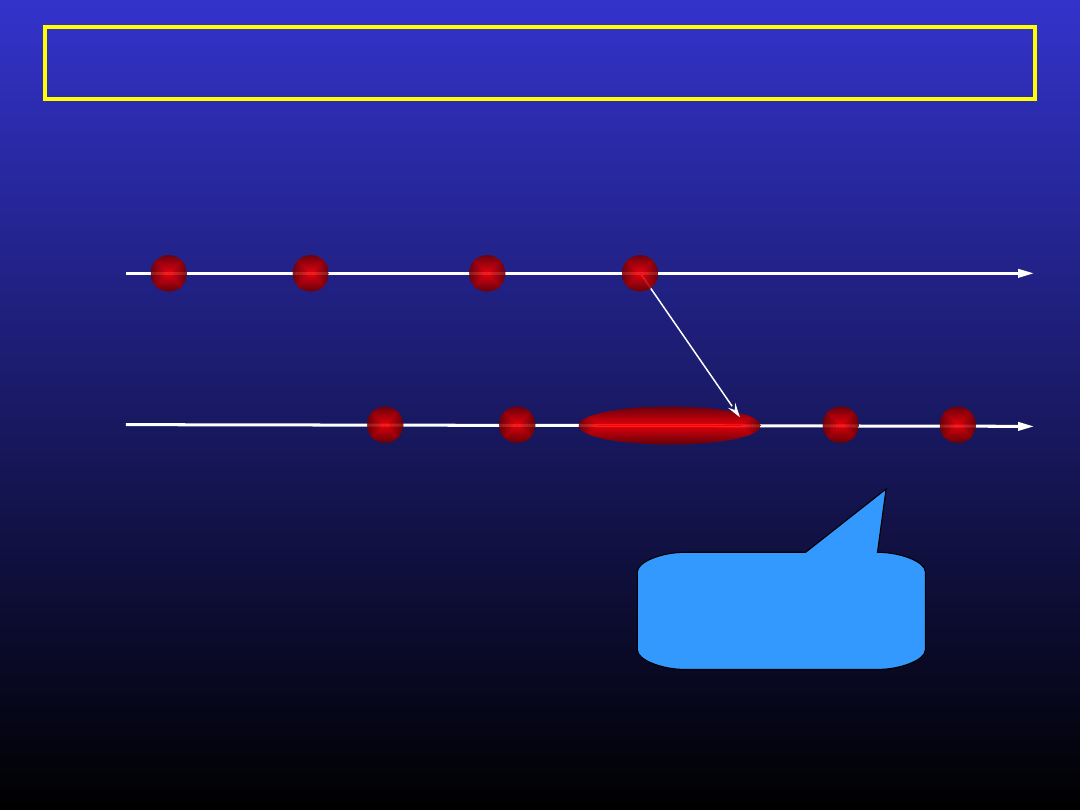
Spójność sekwencyjna – przykład
Spójność sekwencyjna – przykład
w
2
(x)1
p
2
p
1
w
2
(x)2
r
1
(x)1
w
2
(x)1
1
w
2
(x)2
1
r
1
(x)1
w
2
(x)1
2
w
2
(x)2
hv
2
:
hv
1
:
Spójność sekwencyjna – protokół koherencji
Spójność sekwencyjna – protokół koherencji
(1)
(1)
read(x
X)
return M
i
[x]
write(x
X, v)
atomic_broadcast U(x,
v)
wait
return
on receipt of U(x, v)
from p
k
M
i
[x] : v
if k i
signal
end if
Algorytm fast-read dla procesu p
i
:
Spójność sekwencyjna — protokół koherencji
Spójność sekwencyjna — protokół koherencji
(2)
(2)
read(x
X)
if num
i
0
wait
end if
return M
i
[x]
write(x
X, v)
num
i
: num
i
1
FIFO_atomic_broadcast U(x, v)
return
on receipt of U(x, v)
from p
k
M
i
[x] : v
if k i
num
i
: num
i
1
if num
i
0
signal
end if
end if
Algorytm fast-write dla procesu p
i
:

Modele spójności — definicja spójności
Modele spójności — definicja spójności
atomowej
atomowej
Obraz hv historii h musi spełniać następujące warunki:
2
1
2
1
..
1
2
,
1
o
o
o
o
i
RT
n
j
OW
O
o
o
i
1
2
2
1
..
1
..
1
2
,
1
w
w
w
w
i
n
i
i
n
i
OW
w
w
2
1
o
o
RT
o1 kończy się w czasie
rzeczywistym, zanim zaczyna się
o2
Spójność atomowa — przykład
Spójność atomowa — przykład
w
2
(x)1
p
2
p
1
w
2
(x)2
r
1
(x)1
r
1
(x)2

Modele spójności — definicja spójności
Modele spójności — definicja spójności
przyczynowej
przyczynowej
Obraz hv historii h musi spełniać warunek:
2
1
2
1
2
,
1
o
o
o
o
i
OW
O
o
o
i
Spójność przyczynowa — przykład
Spójność przyczynowa — przykład
w
2
(x)1
p
2
p
1
r
2
(y)1
r
1
(x)1
w
1
(x)2 w
1
(y)1
r
2
(x)2
w
1
(x)
2
1
w
2
(x)1
1
w
1
(y)1
w
2
(x)1
2
w
1
(x)2
hv
2
:
hv
1
:
1
r
1
(x)1
2
r
2
(y)1
2
w
1
(y)1
2
r
2
(x)2
Spójność przyczynowa — protokół koherencji
Spójność przyczynowa — protokół koherencji
read(x
X)
return M
i
[x]
write(x
X, v)
M
i
[x] : v
causal_broadcast U(x,
v)
return
on receipt of U(x, v)
from p
k
if k i
M
i
[x] : v
end if
Algorytm dla procesu p
i
:

Modele spójności — definicja spójności
Modele spójności — definicja spójności
PRAM
PRAM
Obraz hv historii h musi spełniać warunek:
2
1
2
1
..
1
2
,
1
o
o
o
o
i
j
n
j
OW
O
o
o
i
Spójność PRAM — przykład
Spójność PRAM — przykład
p
2
p
1
r
2
(y)1
w
1
(x)1 w
1
(y)1
w
2
(x)2
p
3
r
3
(x)2 r
3
(x)1
w
2
(x)2
3
r
3
(x)2
hv
3
:
3
r
3
(x)1
3
w
1
(x)1
3
w
1
(y)1
Spójność PRAM — protokół koherencji
Spójność PRAM — protokół koherencji
read(x
X)
return M
i
[x]
write(x X, v)
M
i
[x] : v
FIFO_broadcast U(x, v)
return
on receipt of U(x, v)
from p
k
if k i
M
i
[x] : v
end if
Algorytm dla procesu p
i
:

Modele spójności — definicja koherencji
Modele spójności — definicja koherencji
Obraz hv historii h musi spełniać warunek:
1
2
2
1
..
1
..
1
|
2
,
1
w
w
w
w
i
n
i
i
n
i
x
O
OW
w
w
X
x
Koherencja — przykład
Koherencja — przykład
w
2
(x)1
p
2
p
1
r
2
(y)1
r
1
(x)1w
1
(x)2
w
1
(y)1
r
2
(x)1
r
1
(x)2
r
2
(x)2
w
2
(x)
1
2
w
1
(y)1
hv
2
:
2
r
2
(x)1
2
r
2
(y)1
2
w
1
(x)2
w
2
(x)
1
1
r
1
(x)1
hv
1
:
1
r
1
(x)2
1
w
1
(x)2
1
w
1
(y)1
2
r
2
(x)2
Koherencja (model spójności) — protokół
Koherencja (model spójności) — protokół
koherencji (1)
koherencji (1)
read(x
X)
return M
i
[x]
write(x
X, v)
atomicx_broadcast
U(x, v)
wait
return
on receipt of U(x, v)
from p
k
M
i
[x] : v
if k i
signal
end if
Algorytm fast-read dla procesu p
i
:
Koherencja (model spójności) — protokół
Koherencja (model spójności) — protokół
koherencji (2)
koherencji (2)
read(x
X)
if num
i
[x] 0
wait
end if
return M
i
[x]
write(x
X, v)
num
i
[x] : num
i
[x] 1
FIFOx_atomicx_broadcast U(x, v)
return
on receipt of U(x, v)
from p
k
M
i
[x] : v
if k i
num
i
[x] : num
i
[x] 1
if num
i
[x] 0
signal
end if
end if
Algorytm fast-write dla procesu p
i
:

Modele spójności — definicja spójności
Modele spójności — definicja spójności
procesorowej
procesorowej
Obraz hv historii h musi spełniać następujące warunki
(PRAM + koherencja):
2
1
2
1
..
1
2
,
1
o
o
o
o
i
j
n
j
OW
O
o
o
i
1
2
2
1
..
1
..
1
|
2
,
1
w
w
w
w
i
n
i
i
n
i
x
O
OW
w
w
X
x
Spójność procesorowa — przykład
Spójność procesorowa — przykład
w
2
(x)1
p
2
p
1
r
2
(y)1
r
1
(x)1
w
1
(x)2 w
1
(y)1
r
2
(x)1
w
1
(x)
2
1
w
1
(y)1
hv
1
:
1
r
1
(x)1
1
w
2
(x)1
w
1
(x)
2
2
w
2
(x)1
hv
2
:
2
r
2
(y)1
2
w
1
(y)1
2
r
2
(x)1
r
1
(x)2
1
r
1
(x)2
r
2
(y)0
2
r
2
(y)0
Spójność procesorowa — protokół koherencji
Spójność procesorowa — protokół koherencji
read(x
X)
if num
i
[x] 0
wait
end if
return M
i
[x]
write(x
X, v)
num
i
[x] : num
i
[x] 1
FIFO_atomicx_broadcast U(x, v)
return
on receipt of U(x, v)
from p
k
M
i
[x] : v
if k i
num
i
[x] : num
i
[x] 1
if num
i
[x] 0
signal
end if
end if
Algorytm fast-write dla procesu p
i
:
Spójność procesorowa — przykład
Spójność procesorowa — przykład
naruszenia porządku przyczynowego
naruszenia porządku przyczynowego
r
2
(x)1
p
2
p
1
r
3
(y)1
w
1
(x)2
w
2
(y)1
p
3
r
3
(x)1 r
3
(x)2
w
1
(x)1
r
2
(x)2
w
1
(x)1 w
1
(x)2
w
2
(y)1
hv
3
: w
2
(y)1 r
3
(y)1 w
1
(x)1 r
3
(x)1 w
1
(x)2
r
3
(x)2
Relacje pomiędzy modelami spójności
Relacje pomiędzy modelami spójności
2
1
2
1
..
1
2
,
1
o
o
o
o
i
j
n
j
OW
O
o
o
i
2
1
2
1
2
,
1
o
o
o
o
i
OW
O
o
o
i
2
1
2
1
..
1
2
,
1
o
o
o
o
i
RT
n
j
OW
O
o
o
i
1
2
2
1
..
1
..
1
2
,
1
w
w
w
w
i
n
i
i
n
i
OW
w
w
PRAM
przyczynow
a
koherencj
a
p
ro
c
e
s
o
ro
w
a
sekwencyjna
atomowa
1
2
2
1
..
1
..
1
|
2
,
1
w
w
w
w
i
n
i
i
n
i
x
O
OW
w
w
X
x

Definicja modeli spójności przy dostępie
Definicja modeli spójności przy dostępie
synchronizowanym — założenia
synchronizowanym — założenia
W skład systemu DSM wchodzą:
zbiór sekwencyjnych procesów P = {p
1
, p
2
, …, p
n
}
zbiór współdzielonych zmiennych X = {x
1
, x
2
, …}
zbioru obiektów synchronizujących S = {s
1
, s
2
, ...}
Wyróżnia się (najczęściej) dwa rodzaje obiektów
synchronizujących:
zamek (ang. lock), na którym wykonywane są operacje:
acquire — nabycie zamka
release — zwolnienie zamka
bariera (ang. barrier) z operacją
synchronizacja na barierze
Spójność słaba
Spójność słaba
(ang.
(ang.
weak consistency
weak consistency
)
)
Wyróżnia się dwa rodzaje operacji dostępu:
operacje dostępu do globalnych danych
(współdzielonych),
operacje dostępu do zmiennych synchronizujących.
Definicja modelu:
operacje dostępu do zmiennych synchronizujących są
spójne atomowo (w nowszym podejściu sekwencyjnie),
nie można wykonać (zakończyć) operacji dostępu do
zmiennej synchronizującej przed globalnym
zakończeniem wcześniejszych operacji dostępu do
zmiennych współdzielonych,
nie można wykonać (zakończyć) operacji dostępu do
zmiennej współdzielonej przed globalnym
zakończeniem wcześniejszych operacji dostępu do
zmiennych synchronizujących.
Spójność słaba — przykład
Spójność słaba — przykład
w
2
(x)1
p
2
p
1
synch
2
(s)
r
1
(x)1
synch
1
(s)
r
2
(x)2
w
1
(x)2
r
2
(x)0
wartość początkowa x = 0

Spójność zwalniania
Spójność zwalniania
(ang.
(ang.
release
release
consistency
consistency
)
)
Dwa rodzaje synchronizacji są możliwe:
wzajemne wykluczanie (acquire-release),
synchronizacja na barierze.
Operacje synchronizujące są spójne procesorowo, a
pozostałe operacje są spójne w sensie PRAM.
Repliki są doprowadzane do stanu spójnego przy operacji
bariery oraz przy
release w przypadku spójności eager release,
acquire w przypadku spójności lazy release.
Doprowadzanie do stanu spójnego polega na:
unieważnianiu replik w przypadku protokołu
unieważniania,
aktualizacji replik w przypadku protokołu aktualizacji.
Spójność zwalniania — przykład
Spójność zwalniania — przykład
r
2
(x)0
p
2
p
1
acq
1
(lock)
w
1
(x)1rel
1
(lock)
r
2
(x)1
acq
1
(lock)
W przypadku protokołu
unieważniania operacje
spowodują błąd strony
w
1
(y)1
r
2
(y)0
r
2
(y)1

Spójność zakresu
Spójność zakresu
(ang.
(ang.
scope consistency
scope consistency
)
)
Operacje acquire i release odpowiednio otwierają i
zamykają zakres.
Operacja bariery zamyka zakres globalny i otwiera następny
zakres globalny.
Istnieją jawne operacje otwarcia i zamknięcia zakresu:
open_scope i close_scope.
Po otwarciu zakresu aktualizowane/unieważnianie są
wszystkie repliki zmodyfikowane w czasie poprzedniego
otwarcia zakresu (poprzedni zakres musi być zamknięty).
Spójność zakresu — przykład
Spójność zakresu — przykład
r
2
(x)0
p
2
p
1
acq
1
(lock)
w
1
(x)1rel
1
(lock)
r
2
(x)1
acq
1
(lock)
w
1
(y)1
r
2
(y)0
r
2
(y)0

Spójność wejścia
Spójność wejścia
(ang.
(ang.
entry consistency
entry consistency
)
)
Spójność wejścia zbliżona jest do spójności zakresu.
Są dwa rodzaje operacji acquire: współdzielona i wyłączna.
Z każdym globalnym obiektem związana jest zmienna
synchronizująca, na której wykonywana jest odpowiednia
operacja przed dostępem do zmiennej.
Własność lokalności
Własność lokalności
Lokalność jest cechą spójności atomowej i
koherencji.
Własność
Własność
P
P
systemu współbieżnego jest
systemu współbieżnego jest
lokalna wówczas, gdy system jako całość
lokalna wówczas, gdy system jako całość
posiada własność
posiada własność
P
P
, jeśli każdy pojedynczy
, jeśli każdy pojedynczy
obiekt posiada własność
obiekt posiada własność
P
P
.
.
Własność lokalności — przykład
Własność lokalności — przykład
r
2
(x1)1
p
2
p
1
r
2
(y1)1
r
1
(y2)1
w
1
(x1)1
w
1
(y1)1
r
2
(x2)1
w
1
(x1)
1
1
w
2
(y1)1
1
w
1
(x2)1
w
1
(x1)1
2
w
1
(x2)1
hv
2
:
hv
1
:
1
w
1
(y2)1
2
r
2
(y1)1
2
w
1
(y1)1
2
r
2
(x2)0
w
1
(x2)1
w
1
(y2)1
r
2
(x2)0
2
r
2
(x1)1
2
r
2
(x2)1
2
r
2
(y2)1
2
w
1
(y2)1
Własność lokalności — przykład
Własność lokalności — przykład
r
2
(x1)1
p
2
p
1
w
1
(x1)1
r
2
(x2)1
w
1
(x1)
1
1
w
1
(x2)1
w
1
(x1)1
2
w
1
(x2)1
hv
2
:
hv
1
:
2
r
2
(x2)0
w
1
(x2)1
r
2
(x2)0
2
r
2
(x1)1
2
r
2
(x2)1
Własność lokalności — przykład
Własność lokalności — przykład
p
2
p
1
r
2
(y1)1
r
1
(y2)1
w
1
(y1)1
w
2
(y1)
1
hv
2
:
hv
1
:
1
w
1
(y2)1
2
r
2
(y1)1
w
1
(y1)
1
w
1
(y2)1
2
r
2
(y2)1
2
w
1
(y2)1

Koniec
Koniec
...
i żyli długo
i
szczęśliwie
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
Wyszukiwarka
Podobne podstrony:
012 2011 DSM zal 8, kandek
DSM podsumowanie
DSM podsumowanie
DSM 2 TEST 3
III tydzień Kwestie plci w DSM-IV
Dydaktyczny system mikroprocesorowy DSM 51 Budowa systemu
Zarzadzenie Nr? 07 DSM
Kryteria diagnostyczne autyzmu w kolejnych wersjach DSM, Pedagogika, pedagogika specjalna
Charakterystyka zespołu obsesyjno-kompulsyjnego w oparciu o DSM IV- R, Kliniczna, Psychopatologia, T
DSM by Jeżyk na koma
DSM V - tłumaczenie
Skala nasilenia stresu psychospoêecznego dla dorosêych wedêu , Skala nasilenia stresu psychospołeczn
PTSD, Kryteria diagnostyczne PTSD wg ICD10 i DSM IV, ICD 10
DSM-IV, psychologia, V rok, diagnoza i terapia adhd
Pytania DSM
DSM IV, Z pracy pedagoga szkolnego, psychologia
Kryteria Diagnostyczne DSM
więcej podobnych podstron