
POMIARY
W ENERGETYCE
TECHNIKA POMIAROWA
Andrzej Wawszczak
42 631 25 97
andrzej.wawszczak@p.lodz.pl

Poprawną jakość eksploatacji
obiektów energetycznych można osiągnąć
między innymi dzięki zastosowaniu nowoczesnych systemów informatyki i
sterowania, zarówno w sfe-rze
użytkowania
, jak i
zarządzania
.
Obiekt
energetyczny
wyposażony w odpowiednią aparaturę pomiarową,
informującą użytkownika o przebiegu procesu technologicznego i stanie
eksploatowanego obiektu.
Ze wzrostem mocy urządzenia, wzrastają:
•
gabaryty
,
•
skomplikowanie budowy
,
•
koszty
,
•
wartości parametrów fizycznych
procesu technologicznego:
- zmniejszanie bezpiecznych (dopuszczalnych) zmian,
-wzrasta wymagana liczba punktów pomiarowych i dokładność pomiaru.
Znaczne
wymiary obiektów energetycznych
uniemożliwiają obserwację
zainstalowanych bezpośrednio na obiekcie przyrządów pomiarowych.
Wyniki pomiarów są
zdalnie przesyłane
do dyspozytorni, gdzie znajdują się
przyrządy wskazujące i rejestrujące poszczególne parametry (temperaturę,
ciśnienie, strumienie przepływów itd.) w wybra-nych punktach procesów
technologicznych. Z dyspozytorni, np. nastawni elektrowni, personel
nadzoruje pracę urządzeń technologicznych.


CIŚNIENIA I TEMPERATURY W ELEKTROWNI
I – układ nawęglania,
II – układ cieplny,
III – układ elektryczny,
IV – układ chłodzący,
V – układ paliwo-
powietrze-
spaliny,
VI – układ
odpopielania.

PODSTAWOWE POJĘCIA I DEFINICJE
Pomiar
to proces poznawczy polegający na porównaniu z odpowiednią
dokładnością
wartości wielkości mierzonej x z pewną jej wartością
przyjętą za
jednostkę
miary, w określonych warunkach za pomocą
odpowiednich środków technicznych. Na proces pomiaru składa się wiele
kolejnych czynności, które stanowią kolejne zadania:
• zdefiniowanie wielkości mierzonej X,
• wybór zasady fizycznej i metody pomiaru,
• wykonanie pomiaru,
• opracowanie wyników pomiaru.
Wielkość fizyczna
– jednoznacznie zdefiniowana właściwość materii.
Jednostka miary
– wartość wielkości umownie przyjętej za liczbowo równą
jedności, którą odtwarza się za pomocą wzorców.
Zasada pomiaru
– wykorzystane
zjawisko fizyczne
, stanowiące podstawę
pomiaru, np. zjawisko termoelektryczne wykorzystane do pomiaru
temperatury.
Metoda pomiaru
–
sposób uzyskania wyniku pomiaru
przez wykorzystanie
zasad i środków pomiarowych. Metoda pomiaru mówi o obranym
sposobie porównywania z wzorcem miary.
Sposób pomiaru
–
kolejność czynności
niezbędnych do wykonania pomiaru.
Cel
pomiaru
–
uzyskanie
informacji
o
parametrach
fizycznych
charakteryzujących badany obiekt i o przebiegających w nim procesach i
przemianach. Zależnie od sposobu uzyskiwania i wykorzystywania tych
informacji, na przykładzie elektrowni parowej, można wyróżnić
następujące rodzaje pomiarów.

Pomiary bieżące
(ciągłe, eksploatacyjne) – ciągły pomiar wielkości
fizycznych charakte-rystycznych dla procesu eksploatacyjnego i mające
na celu:
• zapewnienie prawidłowego prowadzenia procesu
technologicznego i
bezpieczeństwa pracy urządzeń (np. poziomy wody w zbiornikach,
temperatury pary i metalu, ciśnienie pary, prędkości obrotowej itp.), przy
czym część wyników tych pomiarów jest wyko-rzystywana w układach
automatycznej regulacji procesu technologicznego,
• zapewnienie ekonomicznych warunków eksploatacji
wszystkich urządzeń
elektrowni (np. temperatura i skład chemiczny spalin na wylocie z kotła,
analiza składu chemicznego wody itp.),
• dostarczenie danych do oceny wskaźników techniczno-ekonomicznych
,
charakteryzu-jących poziom eksploatacji elektrowni jako całości (np.
wartość obciążenia).
Pomiary kontrolne
– sprawdzenie dokładności przyrządów do pomiarów
bieżących.
Pomiary gwarancyjne
i
zdawczo–odbiorcze
– mają na celu ocenę
zbudowanej instalacji, jej sprawność i możliwość otrzymania
projektowanych parametrów (np. możliwość za-pewnienia znamionowej
temperatury pary w określonym zakresie obciążeń kotła). Po-miary te są
wykonane ściśle według norm odbiorczych przez odpowiednie instytucje.
Pomiary badawcze
i
prototypów
– są najczęściej przeprowadzone w
laboratoriach specjalistycznych, a ich celem jest uzyskanie informacji o
własnościach
technicznych
urządzeń
nowo
zbudowanych
lub
modernizowanych oraz urządzeń, w których wykorzystuje się nowe
zdobycze nauki.

Pomiar miejscowy
– wynik pomiaru otrzymuje się w miejscu pobrania
sygnału wielkości mierzonej.
Pomiar zdalny
– sygnał wielkości mierzonej jest przenoszony na pewną
odległość do miejsca, gdzie zainstalowany jest miernik wielkości
mierzonej (przyrząd pomiarowy). Przenoszenie to może być realizowane
na drodze:
• mechanicznej,
• hydraulicznej,
• pneumatycznej,
• optycznej,
• elektrycznej.
Rozwój techniki cyfrowej spowodował, że w układach pomiarowych
sygnały analogowe są przetwarzane na postać cyfrową i dalej są
wykorzystywane w systemach pomiaro-wo-kontrolnych. Oprócz systemów
cyfrowych,
do
transmisji
danych
pomiarowych,
są
jeszcze
wykorzystywane
sygnały
elektryczne
prądowe
oraz
niekiedy
pneumatyczne.
Sygnał pomiarowy
– wielkość fizyczna, zawierająca informację podstawową
o wartości wielkości mierzonej. Sygnał pomiarowy ma dwa elementy:
• nośnik sygnału
– wielkość fizyczna opisująca procesy energetyczne
przenoszące informację (prąd lub napięcie elektryczne, przesunięcie
mechaniczne, ciśnienie itp.),
• parametr informacji
– wartość określonego parametru wielkości fizycznej,
np.: I = 16,3 mA, U = 5 V, l = 2,5 mm, p = 68 kPa.

SYGNAŁY POMIAROWE
MIEJSCE POWSTANIA:
pierwotne
–
powstające w
czujniku
i przetworniku
pierwotnym, np.
przesunięcie
mechaniczne,
rezystancja;
wtórne
–
powstające
w następnych elementach
przetwarzających;
FIZYCZNY CHARAKTER
NOŚNIKA:
• elektryczne,
• pneumatyczne,
• mechaniczne,
• optyczne.
CIĄGŁOŚĆ PRZESYŁANIA INFORMACJI W
CZASIE:
• ciągłe
– analogowe,
• dyskretne
– impulsowe, cyfrowe.

ANALOGOWE SYGNAŁY ELEKTRYCZNE:
• stałoprądowe
– duża odporność na zakłócenia i zmianę parametrów w
linii przesyłowej;
• stałonapięciowe
– mała odporność na zakłócenia zewnętrzne, trudne do
wzmacniania, wrażliwe na zmiany parametrów linii przesyłowej;
• amplitudowe
– nośnikiem sygnału jest napięcie sinusoidalne lub
okresowe impulsowe o stałej częstotliwości, parametrem informacji:
amplituda sinusoidy lub impulsu; duża odporność na zakłócenia, łatwe
wzmocnienie, wrażliwe na zmiany parametrów linii;
• częstotliwościowe
(czasowe, fazowe) – nośnikiem sygnału jest napięcie
sinusoidalne lub okresowe impulsowe o stałej amplitudzie, parametrem
informacji może być: częstotliwość, czas trwania impulsu, przesunięcie
fazowe między przebiegami; łatwe do przesyłania i wzmacniania, przy
doborze odpowiedniej częstotliwości nośnej odporne na zakłócenia
zewnętrzne.
Sygnały standaryzowane (zunifikowane):
stałoprądowe
: (0..5) mA, (0..20) mA i (4..20) mA;
pneumatyczne
: (0,02..0,1) MPa;
stałonapięciowe
: (0..10) V, (–10..+10) V –
jako sygnały wewnętrzne,
do przesyłu informacji
między elementami systemu
pomiarowego.

PRZYRZĄDY POMIAROWE
• Przyrząd pomiarowy
– narzędzie służące do przetwarzania wielkości
mierzonej lub innej (związanej z wielkością mierzoną) na wskazanie lub
równoważną informację (np. rejestrację, zapis w pamięci); np.: manometr
sprężysty, przepływomierz, termometry: szklane, termoelektryczne i
rezystancyjne (wraz z urządzeniem wskazującym) itp.
• Miernik
– przyrząd pomiarowy określający tylko za pomocą wskazania
wartość wielkości mierzonej; np. miliwoltomierz.
• Wskaźnik
– przyrząd lub ciało fizyczne służące do stwierdzenia, czy
określone zjawisko lub określona wartość wielkości mierzonej występuje
czy nie występuje; np.: stożki Segera jako wskaźnik temperatury.
• Aparatura pomiarowa
– zespół środków technicznych przeznaczony do
wykonania zadania pomiarowego określoną metodą pomiarową,
obejmujący wszystkie narzędzia pomiarowe i osprzęt pomocniczy
połączone ze sobą według określonego schematu; np.: aparatura do
pomiaru wartości ciepła spalania paliwa.
• Wyposażenie pomiarowe
– zespół przyrządów i aparatur pomiarowych
przeznaczonych do wykonania pomiarów wartości wielkości jednego lub
więcej rodzajów; np.: wyposażenie laboratorium umożliwiającego
pomiary różnych wielkości.

• Czujnik
– element składowy przyrządu pomiarowego (układ fizyczny,
fizyczno-chemiczny itp.), służący do odbierania i przetwarzania informacji
o wielkości mierzonej – stanowi przy tym pierwszy element
przetwornikowy, np. rurka sprężysta manometru, termoelement, rezystor
termometryczny itp. Sygnał wyjściowy z czujnika nazywa się sygnałem
pierwotnym.
• Przetwornik pomiarowy
– narzędzie służące do przetworzenia, z
określoną dokładnoś-cią i według określonego prawa, wartości wielkości
mierzonej (lub wielkości już przetworzonej z wielkości mierzonej) na
wartość innej wielkości lub inną wartość tej samej wielkości. Najczęściej
sygnałem wyjściowym z przetwornika pomiarowego jest sygnał
stosowany
w
standaryzowanych
(zunifikowanych)
systemach
pomiarowych.
• Tor pomiarowy
– ciąg przetworników i części łączących narzędzia
pomiarowe, znajdujących się między czujnikiem, stanowiącym pierwszy
element toru, a urządzeniem wskazującym (rejestrującym), stanowiącym
jego element końcowy.
• Układ pomiarowy
– zestaw sprzętu pomiarowego, którego elementy
(czujniki, przetworniki, przełączniki, mierniki itp.) są wzajemnie
połączone w sposób umożliwiający wykonanie pomiaru.
• System pomiarowy
– zbiór środków pomiarowych, konieczny i
wystarczający
do
przeprowadzenia
eksperymentu
pomiarowego.
Urządzenia wejściowe systemu pomiarowego realizują sprzężenie
badanego obiektu z systemem przetwarzania (obróbki), w którym
realizuje się algorytm pomiaru. Dla dopasowania charakterystyk
sygnałów wyjściowych czujników pomiarowych do wejścia systemu
przetwarzania stosuje się pośrednie wzmacniacze (przetworniki)
pomiarowe lub przetworniki analogowo-cyfrowe.

Ze względu na przeznaczenie przyrządy pomiarowe dzielą się na:
Przyrządy użytkowe
(techniczne, ruchowe, eksploatacyjne) – do
użytkowych (normal-nych) pomiarów (nie do sprawdzania innych narzędzi
pomiarowych). Wykorzystywane do kontroli procesu produkcyjnego.
Przystosowane do trudnych warunków pracy, powinny być odporne na: pył,
wilgoć, wstrząsy mechaniczne itp.
Przyrządy kontrolne
– do sprawdzenia przyrządów użytkowych, czasami
również do pomiarów w pracach naukowo–badawczych. Przyrząd kontrolny
powinien być dokład-niejszy od przyrządu kontrolowanego.
Przyrządy wzorcowe
– używane do sprawdzania i wzorcowania innych
przyrządów
pomiarowych.
Błąd
maksymalny
wskazań
przyrządu
wzorcowego powinien być co najmniej czterokrotnie mniejszy od
dopuszczalnego błędu podstawowego wskazań przyrządu badanego (o
dwie klasy lepszy od przyrządu badanego).
Wzorzec miary
(etalon) – narzędzie pomiarowe odtwarzające, praktycznie
niezmiennie podczas jego użycia, jedną lub kilka znanych wartości danej
wielkości, np. rezystor wzorcowy, tłokowy wzorzec ciśnienia, definicyjne
punkty stałe Międzynarodowej Skali Temperatur itp.
Ze względu na sposób przetwarzania sygnału pomiarowego w procesie
pomiarowym przyrządy dzielą się na:
analogowe
oraz
cyfrowe
.

Sprawdzanie
– porównanie wskazań przyrządu pomiarowego ze
wskazaniem przyrządu wzorcowego w celu określenia jego dokładności lub
wprowadzenia odpowiednich poprawek. Sprawdzenie należy wykonać w
warunkach odniesienia, w co najmniej 5 punktach wskazań, przyczym
punkty te powinny być równomiernie rozłożone w zakresie wskazań
przyrządu badanego i powinny obejmować górną i dolną granicę zakresu
wskazań. Sprawdzenie należy wykonać najpierw dla wartości narastającej,
aż do górnej granicy zakresu wskazań, a następnie dla malejącej, aż do
dolnej granicy zakresu wskazań.
Wzorcowanie
– ustalenie położenia wskazów narzędzia pomiarowego (w
przypadku narzędzia z podziałką) albo wyznaczenie wartości wielkości za
pomocą wzorców odtwa-rzających jedną lub kilka różnych wartości
wielkości.
Skalowanie
– wykonanie podziałki narzędzia pomiarowego na podstawie
wskazów, których położenie ustalono na podstawie wzorcowania, w razie
potrzeby dokonuje się interpolacji między głównymi wskazami.
Legalizacja
– zespół czynności wykonywanych przez Państwową Służbę
Miar, w celu stwierdzenia i zaświadczenia, że badane narzędzie pomiarowe
spełnia wymagania techniczne i metrologiczne określone przepisami
legalizacyjnymi. Legalizacji podlegają narzędzia stosowane do rozliczeń
(liczniki paliw, energii cieplnej i elektrycznej, odważni-ki, taksometry itp.)
oraz stosowane przy czynnościach urzędowych i zawodowych (ochrony
zdrowia, bezpieczeństwa i higieny pracy itp.).
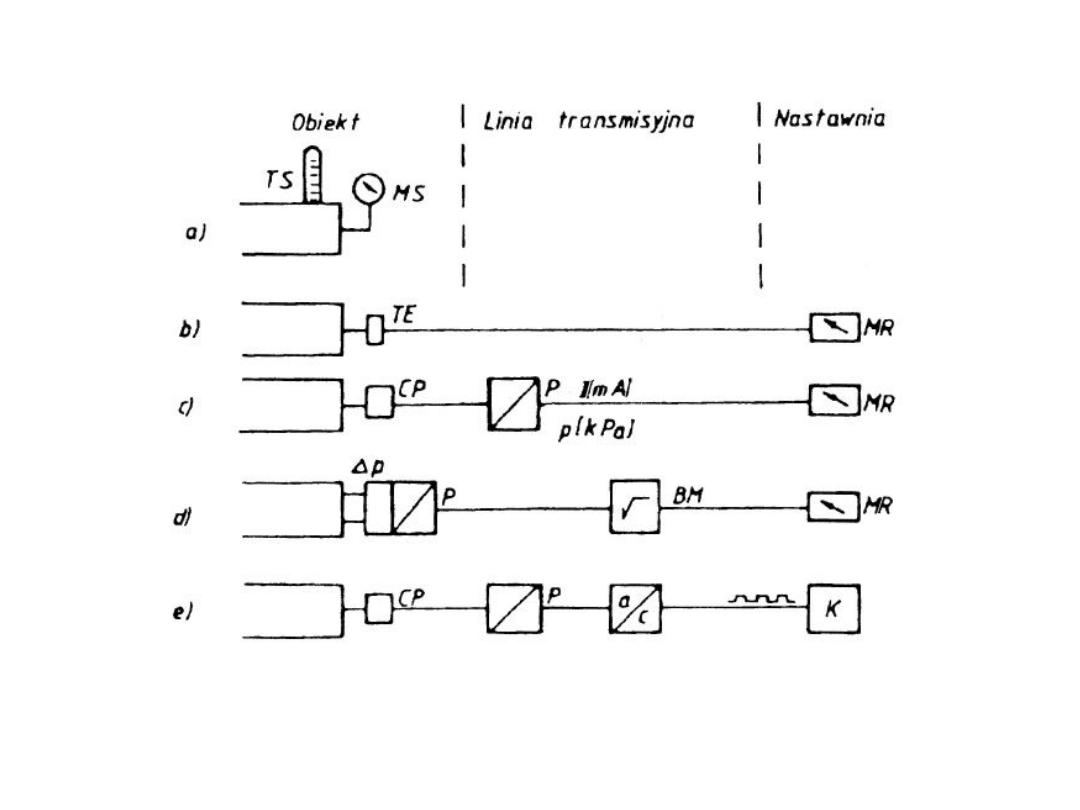
TORY POMIAROWE
CP – czujniki pomiarowe, p – czujnik pomiarowy różnicy, TS – termometr
szklany,
MS – ciśnieniomierz sprężysty, TE – termoelement, MR – miernik wskazujący,
rejestrator,
P – przetwornik pomiarowy, BM – blok arytmetyczny, a/c – przetwornik
analogowo–cyfrowy,
K – komputer.
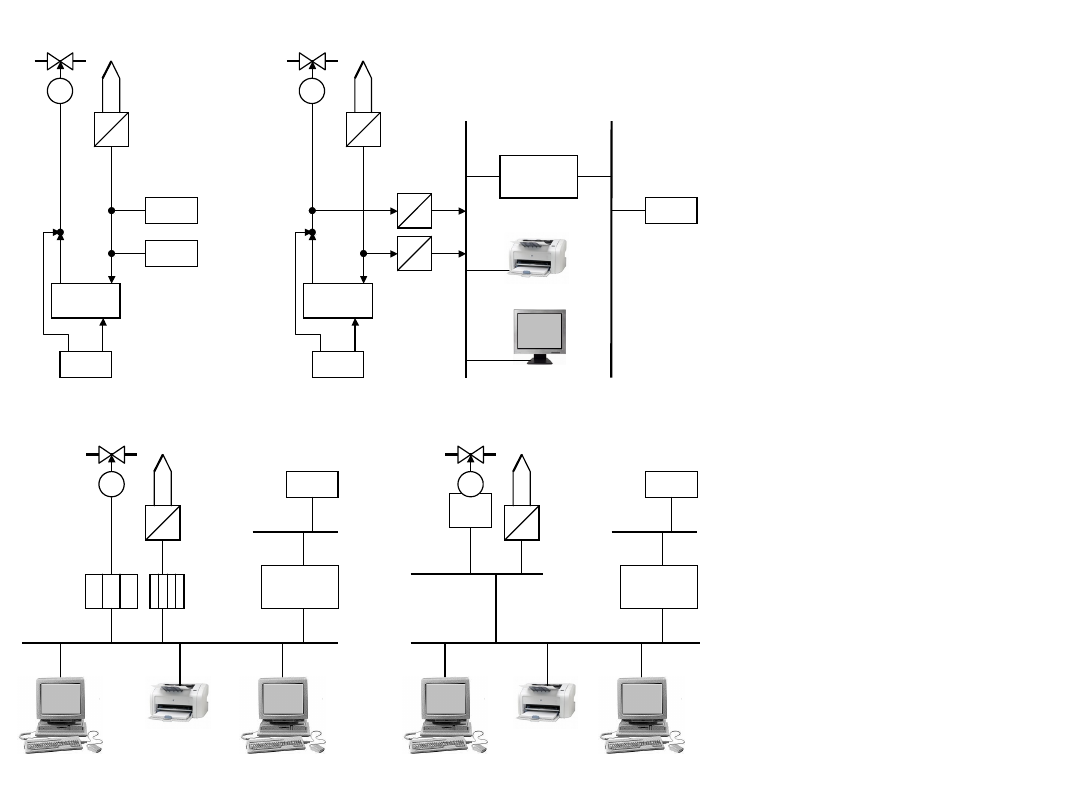
Porównanie prostych
układów pomiarowych i
regulacyjnych w różnych
wersjach sprzętowych
t / I – przetwornik temperatura-
prąd
A / C – przetwornik
analog./cyfrowy,
UAR – układ automatycznej
regulacji,
RA – rejestrator analogowy,
WA – wskaźnik analogowy,
R/A – przełączanie
automat./ręcznie,
DIRE – Dyżurny Inżynier Ruchu. .
a)
układ klasyczny,
b)
układ klasyczny z
wydzieloną
częścią
informatyczną
w postaci cyfrowej,
c)układ cyfrowy,
d)
układ cyfrowy o
dużym rozproszeniu
(decentralizacji).
t
I
S
UAR
R/A
WA
RA
t
I
S
UAR
R/A
A
C
A
C
M
SERWER
DANYCH
t
I
S
SERWER
DANYCH
DIRE
DIRE
Stacja
Inżynierska
Stacja
Operatorska
Szafa
wejść
Szafa
sterowników
t
C
SERWER
DANYCH
DIRE
Stacja
Inżynierska
Stacja
Operatorska
a)
b)
c)
d)
UAR
S
Sieć
niskiego
poziomu
Sieć
wysokiego
poziomu
Sieć
lokalna

Często trudno jest wyróżnić granicę podziału między poszczególnymi
elementami
w torze pomiarowym:
• termometr szklany
- to czujnik (bańka termometryczna), przetwornik
(kapilara) i przy-rząd wskazujący (podziałka na kapilarze);
• manometr sprężysty
- z wskazówką pomiarowa na osi, jeżeli z osią tego
manometru zostanie sprzęgnięty potencjometr obrotowy, wówczas do
toru pomiarowego wprowa-dza się dodatkowy przetwornik i dodatkowy
miernik, którym może być przetwornik (miernik) rezystancji;
• termoelement
oraz
rezystor termoelektryczny
– są zarazem czujnikami
jak i przetworni-kami pomiarowymi (pierwotnymi), ponieważ ich sygnały
wyjściowe mogą być bez dalszego przetwarzania wykorzystane w
miernikach elektrycznych;
• układ pomiarowy ciśnienia z przetwornikiem indukcyjnym lub
pojemnościowym
– wielkość mierzona nie oddziałuje bezpośrednio na element ruchomy
przetwornika, wymagany jest tu czujnik pomiarowy ciśnienia, którego
element ruchomy zmienia swoje położenie wraz z odkształceniem
elementu sprężystego czujnika.
Poszczególne elementy toru pomiarowego spełniają funkcje:
• czujnik pomiarowy
– uzyskanie sygnału pierwotnego, związanego z
wielkością mierzo-ną poprzez określoną funkcją;
• przetwornik pomiarowy
– przekształcenie sygnału pierwotnego na sygnał
użyteczny
o odpowiedniej postaci i mocy;
• układ filtrujący
– usunięcie (wytłumienie) z sygnału pomiarowego
zakłóceń i szumów;
• blok arytmetyczny (obliczeniowy)
- przeprowadzenie korekt i działań
matematycznych;
• układ wyjściowy
– doprowadzenie sygnału pomiarowego do postaci
odpowiedniej dla użytkownika (postać analogowa lub cyfrowa).

METODY POMIAROWE
Metody pomiarowe
– sposób wykorzystania zjawisk fizycznych i środków
pomiarowych, realizowane za pomocą różnych układów, w których mogą
być stosowane różne zasady przetwarzania i porównywania oraz różne
drogi otrzymywania poprawnego wyniku.
Metody pomiaru ze względu na sposób wyznaczenia wartości mierzonej
dzielą się na:
•
bezpośrednie
(proste) – wartość wielkości mierzonej jest równoznaczna
z odczytanymi
wskazaniami,
np.
pomiar
ciśnienia
manometrem
sprężystym, pomiar napięcia
woltomierzem itp.;
•
pośrednie
(złożone) – wartość wielkości mierzonej jest funkcją innych
wielkości
fizycznych i na podstawie wyników bezpośrednich
pomiarów
tych
wielkości
(po
wykonaniu
określonych
działań
matematycznych) wyznacza się wartość wielkości
mierzonej, np.
sprawność kotła na podstawie pomiaru strat cząstkowych, pomiar
strumienia masy w kanale niekołowym z wykorzystaniem rurek
spiętrzających.
Metody pomiaru ze względu na sposób otrzymywania wyniku pomiaru
wielkości mierzonej:
•
bezwzględne
(podstawowe) – wartość wielkości mierzonej jest
wyznaczana na podstawie definicji tej wielkości, np. ciśnienie jako siła
działająca
na
jednostkę
powierzchni,
natężenie
prądu
elektrycznego jako siła działająca na przewodniki,
w których płynie
ten prąd;
•
porównawcze
– wartość wielkości mierzonej otrzymuje się przez
porównanie wyniku
pomiaru ze znaną wartością tej wielkości lub też ze
znaną wartością innej wielkości
jako funkcji wielkości mierzonej.
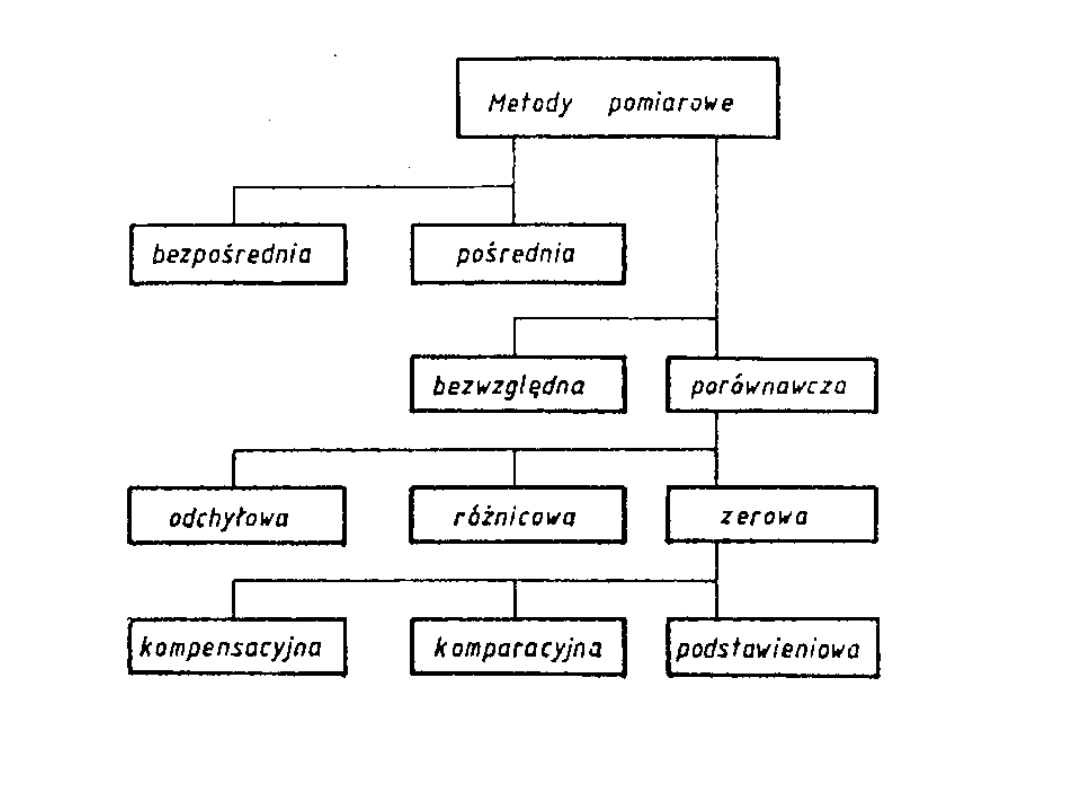
Schemat klasyfikacji metod pomiarowych

Ze względu na wykorzystane charakterystyczne
zjawiska fizyczne
można
metody pomia-rowe podzielić na:
•
metody nieelektryczne
,
•
metody elektryczne
.
Stosowane układy i przyrządy pomiarowe wykorzystują metody
porównawcze – wielkość mierzoną porównuje się z odpowiednią wielkością
wzorcową. Ze względu na sposób porównania, czyli sposób otrzymania
wyniku, rozróżnia się:
metodę odchyłową
– polegającą na określeniu wartości wielkości mierzonej
x przez odchylenie urządzenia wskazującego przyrządu pomiarowego
wyskalowanego w jednos-tkach wielkości mierzonej;
metodę różnicową
– polegającą na porównaniu wartości wielkości
mierzonej x
z niewiele różniącą się od niej znaną wartością tej samej
wielkości x
0
i następnie pomiarze różnicy: x
r
= x – x
0
tych wartości;
metodę zerową
– polegająca na sprowadzeniu do zera różnicy: x
r
= x – x
0
między war-tością mierzoną x, a znaną wartością wielkości porównawczej
x
0
. Miarą wartości x jest w tej metodzie wartość x
0
. Czynność badania
różnicy x
r
i sprowadzenia jej do zera przez zmianę x
0
nazywa się procesem
równoważenia, przy czym proces ten może odbywać się ręcznie lub
automatycznie.
WŁAŚCIWOŚCI METROLOGICZNE
PRZYRZĄDÓW I UKŁADÓW POMIAROWYCH
Właściwości metrologiczne:
• statyczne
:
• dynamiczne
:
gdzie: X – wielkość mierzona, y – sygnał pomiarowy, Z – wektor wielkości
wpływowych,
– czas (zmienność w czasie).
W zależności od warunków, powstają:
błędy statyczne
błędy dynamiczne
.
)
Z
,
X
(
f
y
1
))
(
Z
),
(
X
(
f
)
(
y
2

Pomiary wielkości fizycznych
są zawsze operacjami niedokładnymi.
Otrzymany na drodze pomiaru (doświadczenia)
wynik pomiaru
x zawsze
różni się od rzeczywistej wartości wielkości mierzonej, zwanej
wartością
prawdziwą
x
0
. Równość wyniku pomiaru x i wartości prawdziwej x
0
wielkości mierzonej X jest zdarzeniem wyjątkowym, i fakt jego
wystąpienia pozostaje zazwyczaj nieznany. Istotą pomiaru jest jednak to,
że
niedokładność wyniku pomiaru
zawsze można
oszacować
, czyli można
określić możliwie mały przedział zmian wartości wielkości mierzonej, w
którym ze znanym
prawdopodobieństwem
znajduje się
wartość wyniku
pomiaru
x oraz nieznana
wartość prawdziwa wielkości mierzonej
x
0
.
Mogą być różne przyczyny wystąpienia różnicy między
wynikiem pomiaru
x, a
wartością prawdziwą
x
0
. Najczęściej są to:
• błędy metody pomiarowej
, wynikające z przyjętych uproszczeń;
• błędy przetwarzania
wielkości fizycznej na inną dogodniejszą do
zmierzenia;
• błędy operacji metrologicznych
, wynikające z niedoskonałości
wzorcowania, odczytu, opracowania wyniku;
• błędy urządzeń pomiarowych
:
podstawowe
i
dodatkowe
, których wartość
jest najczęściej określona przez producenta i podana w
dokumentacji
techniczno-ruchowej
(
DTR
) przyrządu.
OCENA JAKOŚCI POMIARU
Wynik pomiaru
– wartość wielkości mierzonej X uzyskana w procesie
pomiaru; gdy uwzględnimy poprawki, otrzymamy
wynik pomiaru
poprawiony
.
Wartość poprawna
– wartość wielkości mierzonej X, którą uważa się w
takim stopniu przybliżoną do
wartości prawdziwej
x
0
tej wielkości, pod
względem
ilościowym
i jakościowym, że różnica między tymi wartościami może być pominięta z
punktu widzenia celu, do którego wartość poprawna (przybliżona) jest
potrzebna.
Błąd pomiaru
– różnica między wynikiem pomiaru x a wartością prawdziwą
x
0
lub wartością poprawną wielkości mierzonej X. Rozbieżność ta jest
wyrażana za pomocą liczby w takich samych jednostkach jak wartość
wielkości mierzonej X.
Błąd pomiaru
definiowany jako różnica między
wynikiem pomiaru
x i
wartością prawdziwą
x
0
wielkości mierzonej X:
x = x – x
0
nazywanego niekiedy
błędem prawdziwym pomiaru
, nie można obliczyć z
tej zależności, ponieważ nie jest znana
wartość prawdziwa
x
0
wielkości
mierzonej X. Można go oszacować lub obliczyć jego niektóre składowe,
przy czym sposób postępowania zależy od rozpoznania rodzaju
oddziaływań wielkości wpływających na wynik pomiaru.

Zamiast wartości prawdziwej, znana jest
wartość poprawna
x
p
, np. wynik
otrzymany przy-rządem wzorcowym, o którym wiemy, że jego błąd pomiaru
jest wielokrotnie mniejszy od błędu pomiaru przyrządu sprawdzanego.
Wówczas błąd pomiaru, nazywany jest niekiedy błędem poprawnym
pomiaru.
Błąd poprawny pomiaru
x
p
ze zmienionym znakiem może być
określany jako:
poprawka
. Po dodaniu poprawki do wyniku pomiaru
otrzymuje się
wartość poprawną
. :
x + x
p
= x
p
.
Często w praktyce nie jest możliwe wyznaczenie błędu poprawnego, np.
nie ma przyrzą-du wzorcowego lub jego wykorzystanie jest z przyczyn
technicznych bardzo trudne lub wręcz niemożliwe, a można jedynie
oszacować jego wartość na podstawie
błędu granicz-nego
wykorzystanego
przyrządu lub urządzenia pomiarowego.
Błąd graniczny pomiaru
x
g
– możliwie najmniejszy przedział wokół
wartości wyniku pomiaru x, wewnątrz którego znajduje się
wartość
prawdziwa
x
0
:
x
0
< x – x
g
; x + x
g
>
Błąd poprawny
x
p
w stosunku do
błędu granicznego
x
g
zachowuje relację:
x
p
x
g
.
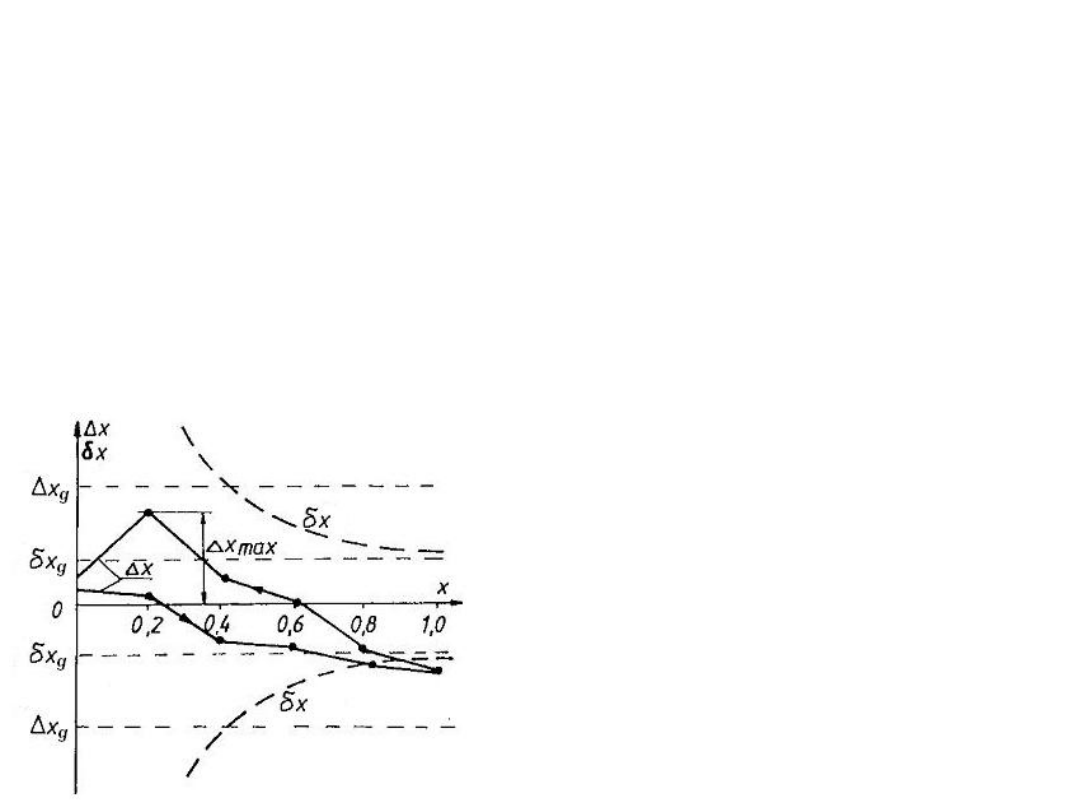
Wartość błędu granicznego
x
g
określa się podczas wzorcowania przyrządu
w odpowied-nio wyposażonym i przystosowanym do tego laboratorium
pomiarowym.

Najczęściej dane na temat błędu granicznego można uzyskać w jego
Dokumentacji Tech-niczno-Ruchowej
(DTR‑ce) lub też na podstawie jego
klasy dokładności, której wartość zwykle jest umieszczana bezpośrednio
na przyrządzie pomiarowym, np. na jego skali.
Klasa dokładności
przyrządu pomiarowego podawana jest, jako wyrażony
w [%]
względny błąd graniczny
odniesiony do zakresu pomiarowego
przyrządu:
gdzie: x
m
– zakres przyrządu pomiarowego.
%
100
x
x
x
m
g
g
U = a∙U
x
+b∙U
n
.
U -błąd pomiaru
U
x
-wartość odczytana
U
n
. -zakres pomiaru
a, b-
stałe
współczynniki
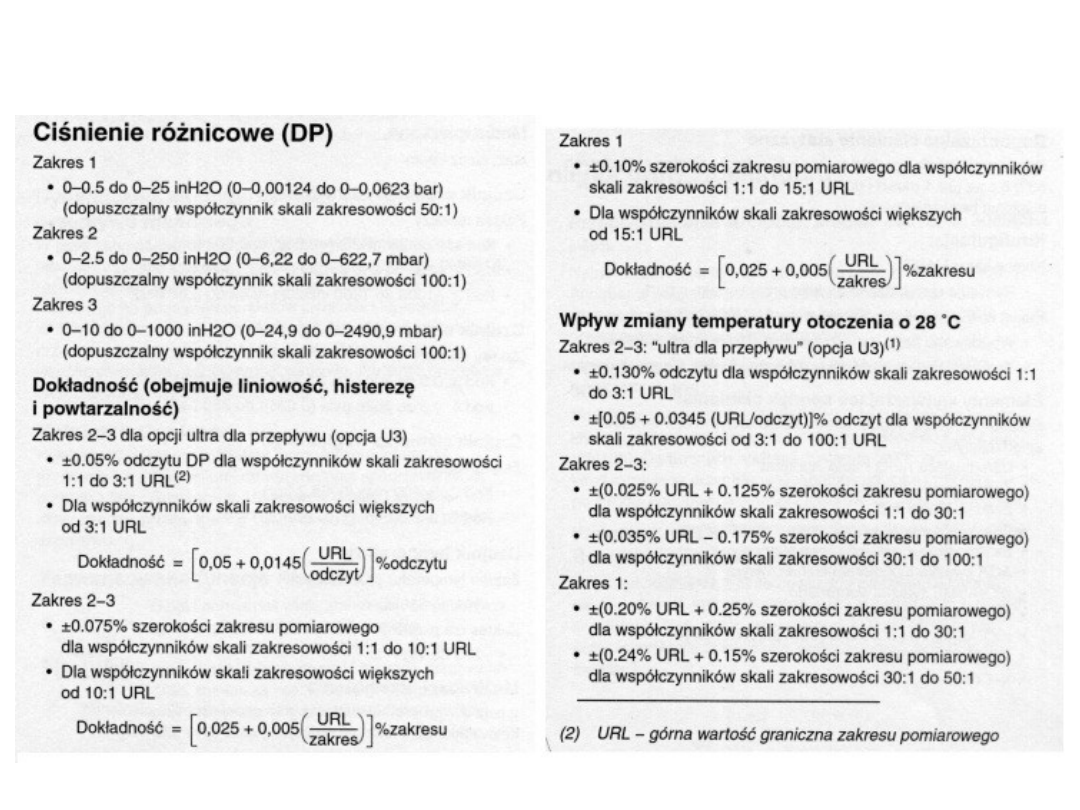
DOKUMENTACJA TECHNICZNO-RUCHOWA
URL – Upper Range Limit
DANE METROLOGICZNE …
Rosemont 3095MV
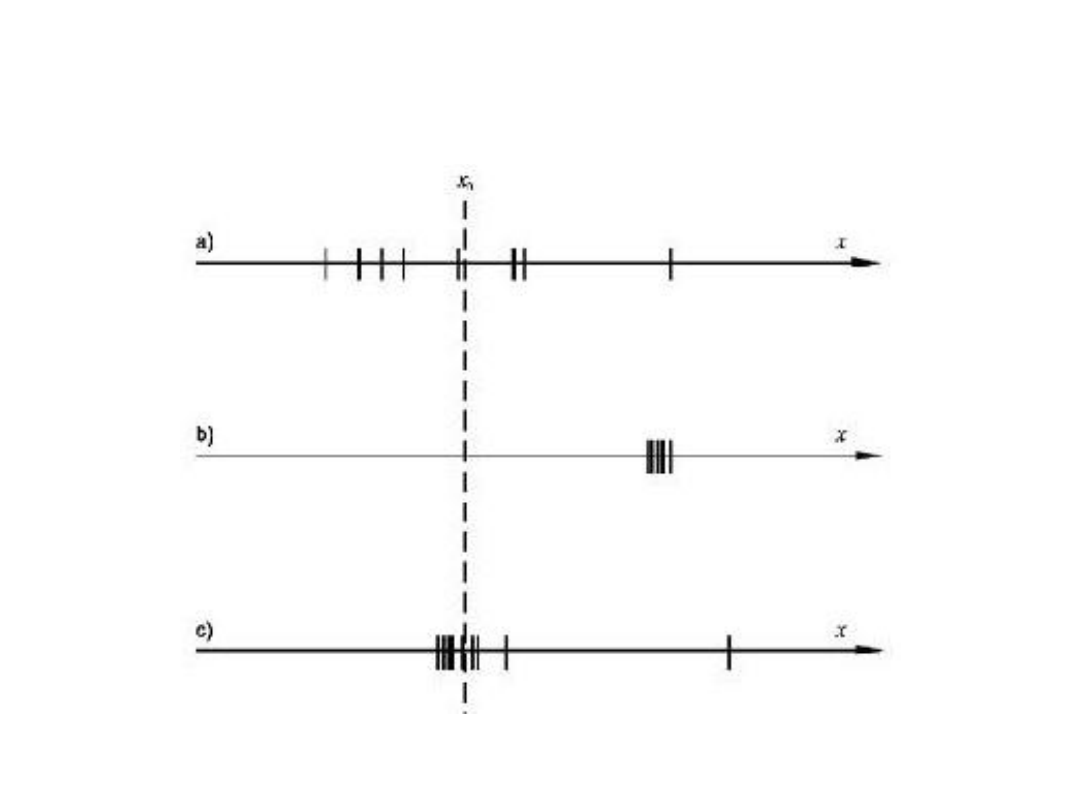
BŁĘDY POMIAROWE
Błędy pomiarowe można podzielić na trzy zasadnicze grupy:
• błędy systematyczne,
• błędy przypadkowe,
• błędy nadmierne i omyłki
.
Wzajemna relacja wartości prawdziwej x
0
i zbioru wyników pomiaru
dla:
a) błędu przypadkowego, b) błędu systematycznego, c) błędu grubego

Błędy systematyczne
– przy wielu pomiarach w tych samych warunkach
mają wartości będące funkcją wielkości mierzonej X. Dla określonej
wartości wielkości mierzonej x można jednoznacznie określić wartość tego
błędu.
Często
wartość błędu systematycznego jest stała
w całym zakresie
przyrządu pomiarowego. Błędy systematyczne to np.: błąd pomiaru
temperatury
termoelementem
o temperaturze zimnych końców termoelementu innej niż znamionowa
(przyjęta przy wzorcowaniu przyrządu), błąd zera wskaźnika wychyłowego,
błąd wskazania miernika analogowego spowodowany niepoprawnym
wykreśleniem podziałki.
Przyczyną błędu systematycznego może być również
błąd metody
pomiarowej
, spowodo-wany oddziaływaniem przyrządu pomiarowego na
wielkość mierzoną lub zjawisko: zbyt duży czujnik (sonda) pomiarowa,
niewłaściwa oporność użytego woltomierza (zbyt mała) lub amperomierza
(zbyt duża), itp.
Błędy wynikające ze złego lub
niestarannego zestawienia przyrządów
i wzorców miar w łańcuchu pomiarowym lub zmian warunków pomiaru
Błędy subiektywne
stale popełniane przez obserwatora, będące najczęściej
wynikiem jego: złych nawyków przy wykonywaniu odczytów, stałego
przyspieszania lub opóźniania czasu rejestracji, złej interpolacji wskazań
(brak doświadczenia).
Błędy systematyczne można wyeliminować
poprzez właściwą
regulację
przyrządu pomiarowego lub wprowadzenie odpowiednich
poprawek
.
Poprawki te mogą być podane w metrykach przyrządów pomiarowych lub
mogą zostać określone poprzez wzorcowanie za pomocą dokładniejszego (o
„wyższej klasie”) wzorcowego przyrządu pomiarowego, często również
przy zastosowaniu dokładniejszej metody pomiarowej.

Błędy przypadkowe
– dla których nie można określić funkcji, która by w
sposób jedno-znaczny wiązała ich wartość z wielkością mierzoną X.
Błędy
przypadkowe
zmieniają
się
w
sposób
nieprzewidziany
,
stochastycznie
, zarówno co do wartości jak i znaku.
Źródłem błędów przypadkowych
może być niesprawne działanie
przyrządów, np.: przy-padkowe zmiany warunków pomiaru, zjawiska
o charakterze tzw. szumów, luzy, tarcie, histereza) lub obserwator, gdy
w pomiarach wymagana jest jego subiektywna ocena.
Błędów przypadkowych nie można wyeliminować, ani ich jednoznacznie
określić drogą elementarnych operacji rachunkowych. Można jedynie przy
użyciu metod rachunku prawdopodobieństwa i statystyki matematycznej
oszacować ich absolutną wartość.
Błędy nadmierne
, tzw. błędy grube, spowodowane są najczęściej
nieuwagą obserwatora, uszkodzeniem przyrządu lub też pomyłką
rachunkową.
Charakterystyczne dla błędów nadmiernych jest to, że wśród pomiarów
występują wartości znacznie różniące się od pozostałych.
Jeżeli wykonujemy tylko jeden pomiar, wówczas wykrycie błędu
nadmiernego jest niemożliwe. Tylko wykonanie serii pomiarów pozwala na
ujawnienie tego typu błędów.
Wynik pomiaru obarczony błędem nadmiernym jest niewiarygodny i musi
być usunięty z serii pomiarów. Istnieją metody statystyczne pozwalające
na ujawnienie, a tym samym na eliminację wyniku pomiaru obarczonego
błędem nadmiernym. Wszystkie one bazują na przyjęciu pewnego
poziomu prawdopodobieństwa, że wynik pomiaru mieści się w
określonym przedziale wartości i odrzuceniu tych wyników pomiarów,
które się w tym zakresie nie mieszczą. Najczęściej przyjmuje się jego
wartość równą 3∙ (gdzie jest odchyleniem standardowym).
BŁĄD W POMIARACH POŚREDNICH
W pomiarach metodą pośrednią wielkość mierzona X jest związana z
wielkościami
U, V i W równaniem definicyjnym:
X = X(U, V, W)
Wartości wielkości mierzonych u, v i w mogą być obarczone bezwzględnymi
błędami: u, v i w. Błąd wyznaczenia wartości x w metodzie pośredniej:
2
2
2
w
W
X
v
V
X
u
U
X
x
Błędy wartości wielkości mierzonych u, v i w, mogą być różnego rodzaju,
najczęściej są to błędy graniczne:
u = u
g
, v = v
g
i w = w
g
.
ROZKŁADY PRAWDOPODOBIEŃSTWA
W procesie poznania rodzaju i wielkości przyczyn, które powodują różnicę
między wyni-kiem pomiaru x, a wartością prawdziwą x
0
wielkości
mierzonej, istotnym narzędziem jest analiza statystyczna wyników
pomiaru. Wówczas wyniki pomiarów x są traktowane jako
zmienne losowe
podlegające określonemu
rozkładowi prawdopodobieństwa
.
Rozkład prawdopodobieństwa
– przyporządkowuje wartości zmiennej
losowej x prawdopodobieństwo przyjęcia określonej wartości przez tę
zmienną.
W zagadnieniach technicznych i praktyce przemysłowej przyjmuje się
najczęściej, że wynik pomiaru, jako zmienna losowa, podlega dwom
rodzajom rozkładu prawdopodo-bieństwa:
normalnemu
i
jednostajnemu
.
Rozkład
normalny
został
opisany
przez
wybitnego
matematyka
niemieckiego Carla Friedricha Gaussa (1777-1855) i znany jest również
jako
rozkład Gaussa
.
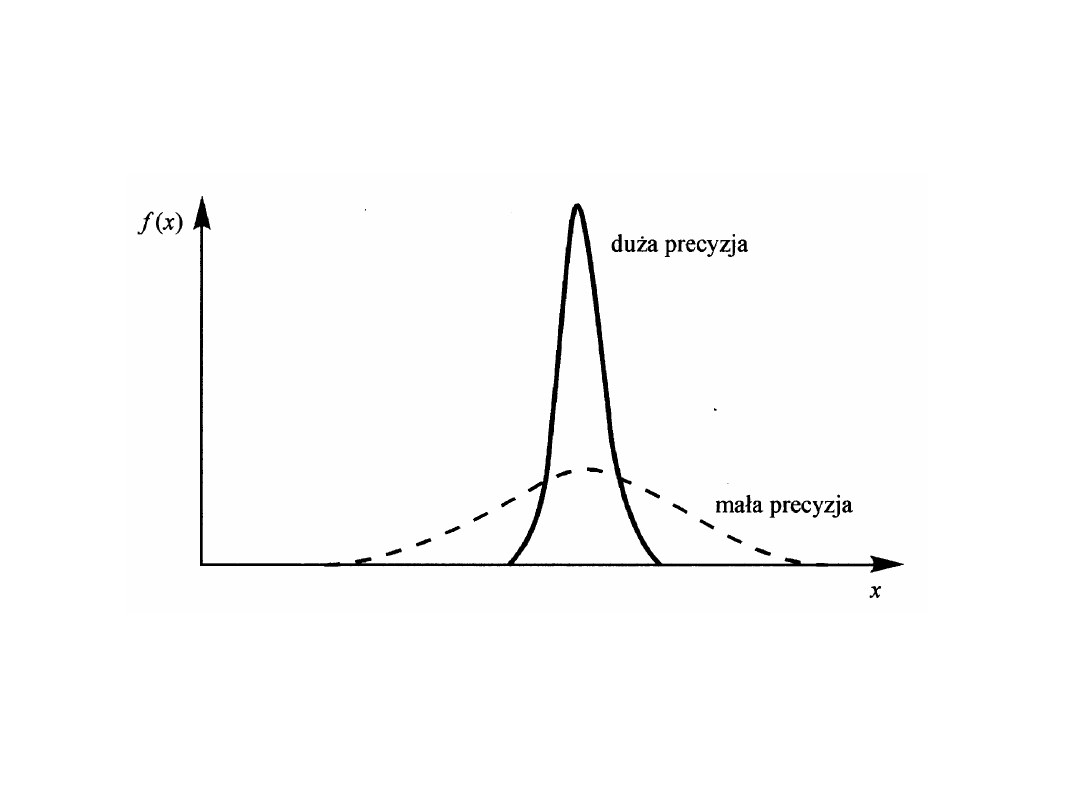
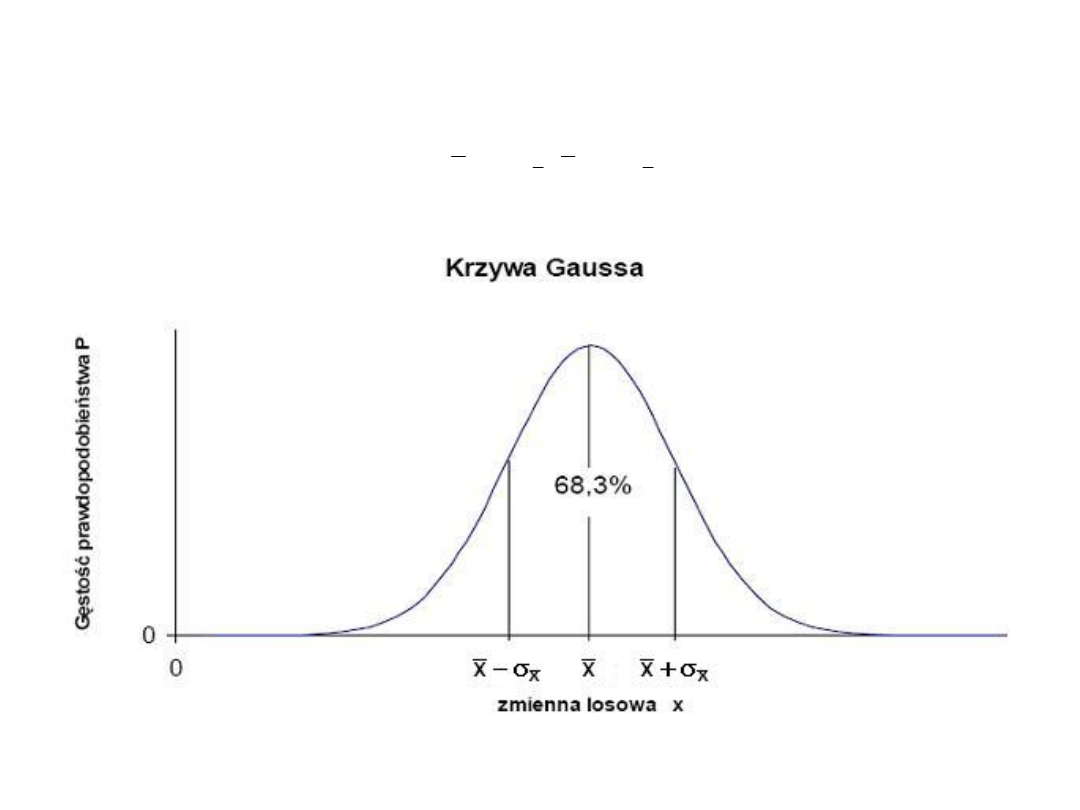
Dla ilości pomiarów n gęstość prawdopodobieństwa dla rozkładu
normalnego (krzy-wa graniczna rozkładu Gaussa) jest określona wzorem:
2
2
0
2
)
x
x
(
e
2
1
)
x
(
f
gdzie:
x
0
– wartość prawdziwa wielkości mierzonej (środek rozkładu),
– odchylenie standardowe (szerokość rozkładu).
prawdopodobieństwo wystąpienia wyników pomiarów:
b
;
a
x
b
a
dx
)
x
(
f
1
dx
)
x
(
f
W rzeczywistości dysponujemy skończoną liczbą
n
pomiarów wielkości
fizycznej
X
o wartościach:
(x
1
, x
2
, x
3
... x
i
… x
n
).
Traktując x jako zmienną losową, można
udowodnić, że
średnia arytmetyczna
z n pomiarów:
jest wartością najbardziej zbliżoną do wartości prawdziwej x
0
, jest jej
estymatą
, najlepszym, najbardziej prawdopodobnym przybliżeniem.
Natomiast
estymatę odchylenia standardowego
dla pojedynczego pomiaru
można obliczyć z zależności:
Wielkość
x
można by utożsamiać z błędem pomiaru, gdybyśmy za jego
wynik przyjęli którąkolwiek z wartości x
i
. Przy obliczaniu średniej
następuje jednak częściowa kompen-sacja odchyłek różnych znaków, dzięki
czemu jest ona prawdopodobnie bliższa wartości prawdziwej x
0
niż wynik
pojedynczego pomiaru. Ilościowo,
estymator odchylenia stan-dardowego
średniej
będzie mniejszy od estymatora
x
:
n
1
i
i
x
n
1
x
n
1
i
2
i
x
)
x
x
(
1
n
1
)
1
n
(
n
)
x
x
(
n
1
i
2
i
x
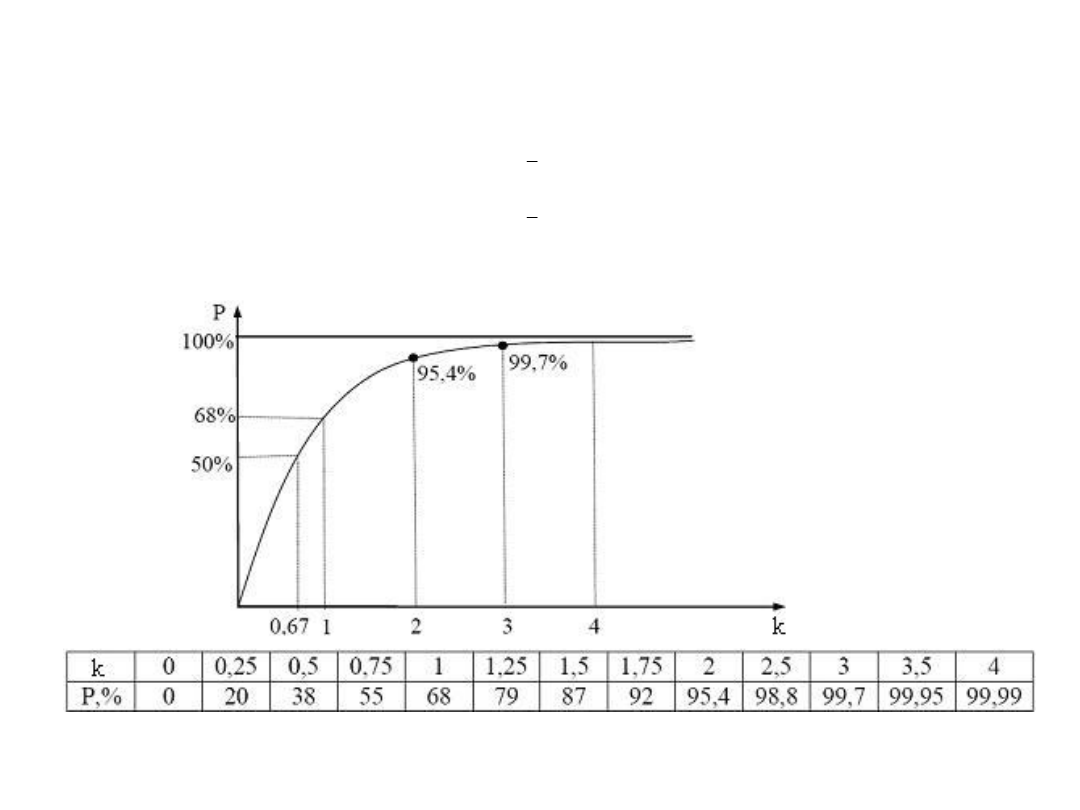
Prawdopodobieństwo
P
, że wynik pojedynczego pomiaru leży w zadanej,
stanowiącej krotność odchylenia standardowego
(k)
, odległości od
wartości średniej (estymaty wartości prawdziwej x
0
), można otrzymać
obliczając całkę:
x
x
k
x
k
x
dx
)
x
(
f
)
k
(
P
Wartość średnia jest estymatą wartości prawdziwej x
0
, można przyjąć, że
znajduje się ona z prawdopodobieństwem p (tabela i wykres) w przedziale:
x
x
0
k
x
;
k
x
x
Często w praktyce liczba n pomiarów mierzonej wielkości fizycznej X jest
mała (n << 30), wówczas do wyznaczenia błędu przypadkowego na
określonym poziomie ufności należy stosować opracowany w 1908 r. przez
angielskiego statystyka W. S. Gosseta (1876-1937), pseudonim Student,
rozkład t-Studenta
.
Funkcja opisująca gęstość prawdopodobieństwa dla rozkładu t-Studenta
nie zależy od odchylenia standardowego, zależy natomiast od liczby n
wykonywanych
pomiarów
oraz
poziomu
ufności
p,
czyli
prawdopodobieństwa, że:
Funkcja gęstości prawdopodobieństwa zmiennej losowej t dla n punktów
pomiarowych ((n-1)
stopni swobody
) jest opisana zależnością:
x
x
0
t
x
;
t
x
x
gdzie: t – krotność odchylenia standardowego średniej ,
– jest tzw. „funkcją gamma” Eulera.
Gdy n wówczas rozkład t-Studenta dąży do rozkładu normalnego
(Gaussa).
2
n
x
2
n
2
1
n
t
1
1
-
n
π
2
1
n
2
n
)
t
(
f
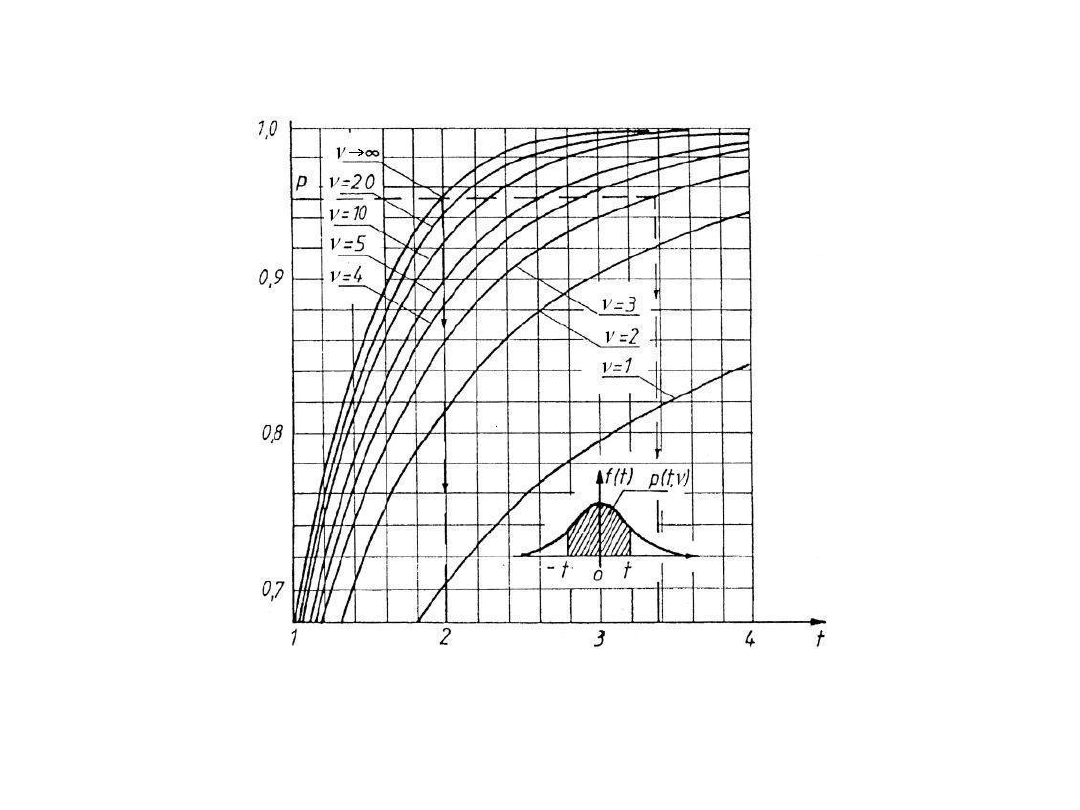
Rozkład t-Studenta
jest stabelaryzowany lub można go przedstawić w
formie wykresu, przy czym wartość zmiennej losowej
t
podawana jest dla
wartości prawdopodobieństwa odpowiadającej poziomowi ufności
p
oraz
liczby stopni swobody: = n - 1.
Przyjęcie granic tolerancji słusznych dla dużej liczby pomiarów (rozkład
Gaussa), w przy-padku niewielkiej liczby pomiarów, prowadzi do mylnych
wniosków dotyczących dokład-ności pomiaru. Dla zadanego poziomu
ufności p = 0,954, wartości współczynników roz-szerzenia: dla rozkładu
normalnego ( ) t = 2 , natomiast z rozkładu t-Studenta dla np.
= 3 t = 3,4.
Rozkład jednostajny
(prostokątny, równomierny) najprawdopodobniej
występuje wów-czas, gdy w kolejnych n pomiarach nie ma zauważalnego
rozrzutu wyników:
x = x
1
= x
2
= ... = x
i
= ... = x
n
Wówczas za główną przyczynę błędu pomiaru należy uznać błąd
wzorcowania przyrządu pomiarowego
a
, który może być traktowany jako
błąd graniczny. Jego wartość jest najczęściej podawana: bezpośrednio na
przyrządzie pomiarowym (klasa przyrządu), w DTR-ce lub w protokole
wzorcowania. Gdy nie ma takich informacji, wówczas wykonujący pomiar,
wykorzystując swoją wiedzę i doświadczenie, może oszacować wartość
a
(najmniejsza działka skali, ostatnia cyfra znacząca itp.) i przyjąć ją jako
najbardziej prawdopodobną.
Dla rozkładu jednostajnego funkcja gęstości prawdopodobieństwa jest
opisana:
w przedziale :
< x – a ; x + a >
a poza tym przedziałem:
f(x) = 0.
Natomiast odchylenie standardowe:
.
a
2
1
)
x
(
f
3
a
dx
)
x
(
f
x
a
a
2
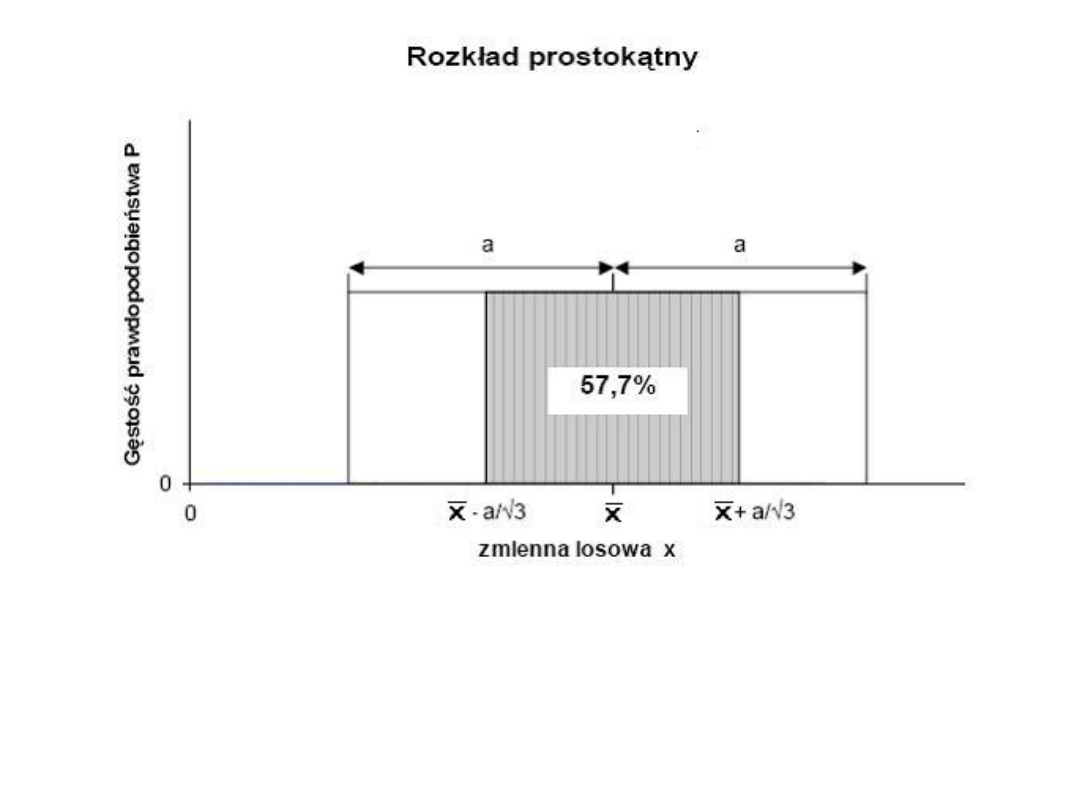
Dla
rozkładu jednostajnego
przyjmuje się, że wartość prawdziwa
x
0
wielkości mierzonej
X
znajduje się w przedziale
< x – a ; x + a >
z
prawdopodobieństwem
p=1
.
Często zdarza się, że dla dokładnych przyrządów pomiarowych błąd
wzorcowania przyrządu pomiarowego a składa się z kilku składników i
również może być funkcją (najczęściej liniową) wielkości mierzonej X:
b
X
m
a

NIEPEWNOŚĆ POMIARU
Oceny niedokładności uzyskanych w procesie pomiarowym wyników,
można dokonać przy wykorzystaniu
teorii błędów
lub
teorii niepewności
,
przy czym zgodnie z zalecenia-mi ISO (International Organization for
Standardization) wprowadzonymi w 1995 roku, należy wykorzystywać
teorię niepewności
.
Zaleca się unikać określenia „
błąd pomiaru
”, zastępując go określeniem
„
niepewność pomiaru
”. Słowo „błąd” powinno używać się wyłącznie dla
nazywania pomyłek ekspery-mentatora (błędy grube) lub błędów
wywołanych niewłaściwą metodą pomiarową. Do opisu niepewności
zmiennej x norma zaleca używanie symbolu
u(x)
od angielskiego słowa
uncertainty
-
niepewność
.
Teoria niepewności stanowi próbę ujednolicenia zasad obliczania i
wyrażania
niedokład-ności pomiaru
stosowanej do wszystkich pomiarów i
do wszystkich rodzajów wielkości mierzonej. Siedem międzynarodowych
organizacji (BIPM, IEC, IFCC, ISO, IUPAC, IUPAP oraz OIML) opracowało
teorię niepewności
, która w taki sam sposób traktuje wszystkie źródła
niedokładności pomiarowych.
Zasady określania niepewności pomiarowych zostały przyjęte przez
Międzynarodowy Komitet Miar (CIPM) i stały się obowiązujące dla
wszystkich organizacji metrologicznych i laboratoriów akredytowanych
wszędzie tam gdzie wymagają tego przepisy prawa.
Opracowano i wydało w 1993 r. przewodnik pod tytułem „
Guide to the
Expression of Uncertainty in Measurement
”, a Główny Urząd Miar (GUM)
wydał w 1999 r. jego polskie tłumaczenie.

Niedokładność pomiaru
charakteryzowana jest za pomocą parametru
nazywanego „
niepewnością
” (
uncertainty
), który jest definiowany jako
„
parametr związany z wynikiem pomiaru charakteryzujący rozrzut
wartości, który można w uzasadniony sposób przypi-sać wartości
mierzonej
”. Takim parametrem może być na przykład
odchylenie
standardo-we
(lub jego wielokrotność) lub też połowa szerokości
przedziału odpowiadającego określonemu poziomowi ufności.
Niepewność pomiaru
jest pojęciem samodzielnym, której w żaden sposób
nie należy wiązać z pojęciem błędu - błąd może być zerowy, a niepewność
duża.
W polskim tłumaczeniu przewodnika pod redakcją prof. J. Jaworskiego,
znajduje się uwaga, iż „
niepewność w ogólnym znaczeniu jest cechą
pomiaru, a ilościowe miary niepewności powinny być nazywane
parametrami niepewności
”
Teoria niepewności pomiaru
nie jest ścisłą teorią fizyczną, lecz raczej
przybliżonym, matematycznym opisem niedoskonałości eksperymentu. Jej
metody i rezultaty nie ograniczają się tylko do zjawisk fizycznych, lecz są
takie same, lub bardzo podobne, dla wszystkich nauk doświadczalnych.
Dla określenia
niepewności pomiaru bezpośredniego
wykorzystujemy dwie
miary:
• niepewność standardowa
u (standard uncertainty), wyrażana przez
odchylenie standardowe średniej arytmetycznej serii pomiarów;
• niepewność rozszerzona
U (expanded uncertainty) określająca przedział
niepewności
przy
określonym
prawdopodobieństwie
p
,
zwanym
poziomem ufności
(coverage propability), który może przyjąć dowolną
wartości pomiędzy 0 a 1.

Pod względem sposobu otrzymania wyróżniamy:
niepewność typu A
- u
A
– wyznaczaną metodami statystycznymi,
niepewność typu B
- u
B
– wyznaczaną metodami innymi niż statystyczne.
Niepewność typu A
– u
A
, obliczana metodami statystyki matematycznej na
podstawie serii pomiarów. Ogólnie,
rozrzut wartości
x
wielkości mierzonej
X może mieć rozkład inny niż normalny.
Niepewność typu B
- u
B
, szacowana w inny sposób niż metodami analizy
statystycznej. Niepewność typu B można oceniać na podstawie:
• właściwości przyrządu lub metody pomiarowej,
• danych kalibracyjnych,
• informacji podawanych przez producenta (DTR),
• danych z wcześniejszych pomiarów itp.
Przy pomiarach technicznych może wystąpić przypadek gdy
niepewność
typu B
jest dużo większa niż
niepewność typu A
(u
A
< 0,1∙u
B
). Wtedy
niepewność
pomiaru
wnoszona
przez
aparaturę
pomiarową
jest dominująca wobec niepewności wnoszonej przez losowy rozrzut
wartości wielkości mierzonej x.
Gdy
niepewność typu A
jest dużo większa niż
niepewność typu B
(u
B
< 0,1∙u
A
), oznacza to, że niepewności związane z rozrzutem wartości
mierzonych są większe od niepewnoś-ci wnoszonych przez aparaturę
pomiarową.
Niepewności typu A
najczęściej przypisuje się rozkład Gaussa lub t-
Studenta i wówczas
niepewność standardową typu A
można wyznaczyć
jako odchylenie standardowe średniej:
gdzie: - średnia arytmetyczna n pomiarów.
Niepewności typu B
, pochodzącej od aparatury pomiarowej, którą
charakteryzuje wartość błędu granicznego x
g
(klasa przyrządu, DTR),
przypisywany jest rozkład prostokątny i wówczas niepewność standardową
typu B można wyznaczyć, jako:
Gdy uwzględnia się tylko
niepewność typu B
(u
B
> 0,1u
A
), to niepewność
rozszerzona jest opisana wzorem:
U = k u
B
,
w którym,
współczynnik rozszerzenia
k, zależy od przyjętego
poziomu
ufności
p i wynosi, dla
rozkładu jednostajnego
:
.
Dla p = 1, niepewność rozszerzona: U = x
g
i jest to najczęściej spotykany
przypadek w technice pomiarowej.
)
1
n
(
n
)
x
x
(
u
n
1
i
2
i
A
x
3
x
u
g
B
p
3
k
Znając
niepewności typu A i B
można wyznaczyć niepewność standardową
złożoną, jako:
Niepewność rozszerzoną
określa zależność:
U = k u
C
.
Współczynnik rozszerzenia
k
ma wartość zależną od przyjętego
poziomu
ufności
p
oraz rozkładu wypadkowego, wynikającego ze złożenia rozkładu
niepewności typu A
(najczęś-ciej
normalnego
) oraz rozkładu
niepewność
typu B
(najczęściej
jednostajnego
). Dla roz-kładów o zbliżonych
wartościach odchyleń standardowych ocena niepewności nie jest
jednoznaczna, toteż zaleca się przyjęcie współczynnika rozszerzenia
odpowiadającego rozkładowi normalnemu lub określanie splotu rozkładów.
2
B
2
A
c
u
u
u
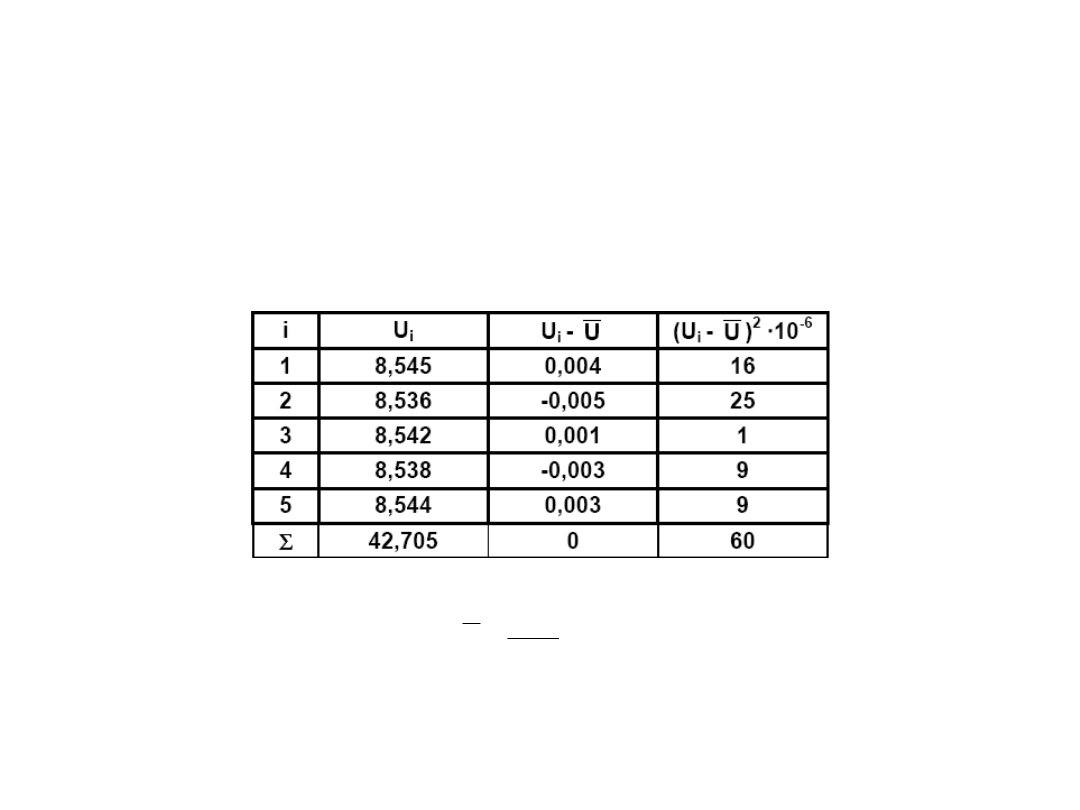
PRZYKŁAD 1
Aby wyznaczyć natężenie prądu w obwodzie zmierzono spadek napięcia na
rezystorze wzorcowym R
n
= 10 o klasie dokładności kl. = 0,02. Pomiar
napięcia przeprowadzono pięciokrotnie woltomierzem cyfrowym na
zakresie U
n
= 10V i błędzie określonym przez producenta jako
U = 0,02%∙U
x
+0,01%∙U
n
. W wyniku pomiaru otrzymano wartości napięć U
i
(tabela). Należy wyznaczyć przedział niepewności wyników pomiaru dla
poziomu ufności p = 0,99.
(
na podstawie: Kalus-Jęcek B., Kuśmierek Z.: Wzorce wielkości elektrycznych i ocena
niepewności pomiaru. Wyd. PŁ, 2006. ISBN 83-7283-183-1, przykład 5.7
)
V
541
,
8
5
U
U
5
1
i
i
Wartość średnia napięcia:
Niepewność standardowa napięcia typu A:
Niepewność standardowa typu B, przy założeniu jednostajnego rozkładu
błędów:
Niepewność złożona pomiaru napięcia wynosi:
Niepewność standardowa typu B wzorcowego rezystora, przy jednostajnym
rozkładzie błędów:
Wartość natężenia prądu:
V
10
7
,
1
1
5
5
10
60
x
x
1
n
n
1
u
3
6
n
1
i
2
i
U
AU
V
10
6
,
1
3
10
1
10
7
,
1
3
U
01
,
0
01
,
0
U
02
,
0
01
,
0
3
u
u
3
3
3
n
gr
BU
V
10
3
,
2
10
6
,
1
10
7
,
1
u
u
u
3
2
3
2
3
2
BU
2
AU
cU
3
n
BR
10
2
,
1
3
R
02
,
0
01
,
0
u
A
8541
,
0
0
,
10
541
,
8
R
U
I
n
V
541
,
8
5
U
U
5
1
i
i
Niepewność złożona natężenia prądu:
Dla poziomu ufności p = 0,99 z tablic rozkładu normalnego współczynnik
rozszerzenia k = 2,576. Zatem niepewność rozszerzona przy założeniu
rozkładu normalnego wynosi:
U
cI
= k
∙u
cI
= 2,576 ∙ 2,518∙10
-4
A ≈ 6,5∙10
-4
A
W rozpatrywanym przykładzie wykonano jednak tylko niewielką liczbę
pomiarów. Zatem współczynnik rozszerzenia powinien być obliczony z
rozkładu t-Studenta, dla liczby pomiarów n = 5 ( = 4), poziomu ufności
p=0,99, z tablic lub wykresu rozkładu t-Studenta można otrzymać t4, a
więc niepewność rozszerzona:
U
cI
= t ∙u
ci
= 4 ∙2,518∙10
-4
≈ 10∙10
-4
A.
Widać, że obliczona niepewność jest większa niż w przypadku przyjęcia
rozkładu normalnego. Tak więc ostatecznie:
I = (854 1) mA dla poziomu ufności p = 0,99.
A
10
518
,
2
10
05
,
1
10
29
,
5
10
2
,
1
10
541
,
8
10
3
,
2
10
1
u
R
U
u
R
1
u
R
I
u
U
I
u
4
8
8
2
3
2
2
2
3
2
2
BR
2
2
n
2
cU
2
n
2
BR
2
n
2
cU
2
cI
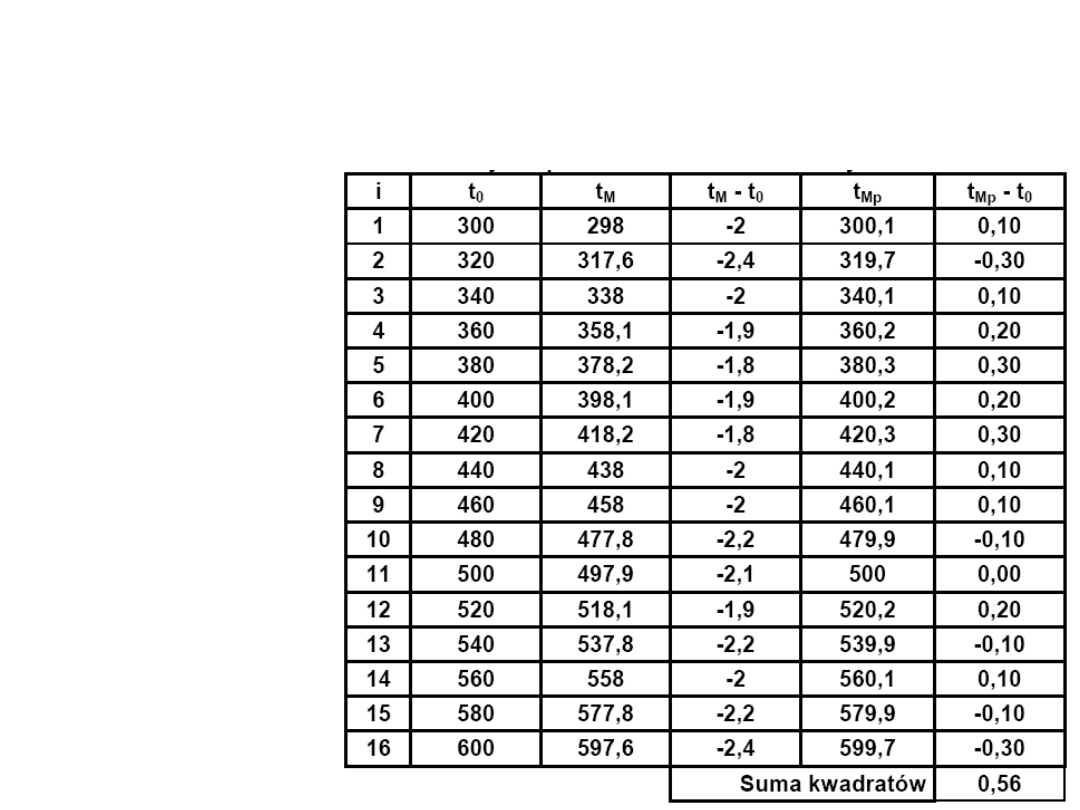
PRZYKŁAD 2
W laboratorium przeprowadzono pomiary kontrolne miernika tablicowego
z wyświetla-czem cyfrowym (4 cyfry) przeznaczonego do pomiaru
temperatury w zakresie pomiarowym (300600)C, termoparą typu K.
Wyniki pomiarów i obliczeń zostały umieszczone w tabeli.
t
0
– wartość temperatury
jaka została zadana z
kalibratora;
t
M
– wartość temperatury
odczytana z miernika
tablicowego;
t
M
- t
0
– różnica między
temperaturą odczytaną z
miernika tablicowego,
a temperaturą zadaną
z kalibratora;
t
Mp
– wartość temperatury
odczytana z miernika
tablicowego po
wprowadzeniu poprawki
(przesunięcie zakresu
pomiarowego miernika);
t
Mp
- t
0
– różnica między
temperaturą odczytaną z
miernika tablicowego po
wprowadzeniu poprawki,
a temperaturą zadaną z
kalibratora.
Wartość różnicy (t
M
- t
0
) wskazywała na występowanie stałego błędu
systematycznego wynoszącego ok. 2°C. W badanym mierniku istnieje
możliwość wyeliminowania tego typu błędu poprzez przesunięcie początku
oraz końca zakresu pomiarowego (przeprogramo-wanie miernika). W tym
przypadku występuje konieczność znajomości wartości poprawki o jaką ma
być przesunięty zakres. Wartość poprawki t
p
o jaką powinien zostać
przesu-nięty początek i koniec zakresu pomiarowego powinna spełniać
warunek:
Po przeprowadzeniu obliczeń optymalizacyjnych uzyskano wynik:
t
p
= 2,1C.
O
tę
wartość
został
przesunięty
początek
i
koniec
zakresu.
Przeprowadzono ponowne pomiary i ich wynik umieszczono w rubryce t
Mp
tabeli. Policzono różnicę (t
Mp
- t
0
) i wynik umieszczono w kolejnej rubryce
tabeli. Różnice w pomiarach zdecydowanie uległy zmniejszeniu. Na
podstawie otrzymanych wyników została policzona niepewność pomia-
rowa miernika po korekcji.
Niepewność typu A wynosi:
16
1
i
2
p
i
0
Mpi
min
)
t
|
t
t
(|
C
048
,
0
)
1
16
(
16
56
,
0
)
1
n
(
n
)
t
t
(
u
n
1
i
2
i
0
Mpi
A
W przypadku niepewności typu B należy uwzględnić podane przez
producenta miernika tablicowego wartości zgodnie z Dokumentacją
Techniczno-Ruchową:
błąd podstawowy:
±0,2% zakresu
kompensacja zmiany temperatury odniesienia: ±0,2% zakresu;
kompensacja zmiany rezystancji przewodów:
±0,2% zakresu.
Wartość błędu granicznego jest sumą kwadratów poszczególnych
składników:
Zakładając w tym przypadku rozkład jednostajny (prostokątny),
niepewność typu B można określić, jako:
Przy pomiarach technicznych, może wystąpić przypadek gdy niepewność
typu B jest dużo większa niż niepewność typu A (w praktyce u
A
< 0,1u
B
).
Wtedy niepewność pomiaru wnoszona przez aparaturę pomiarową jest
dominująca, wobec niepewności wnoszonej przez losowy rozrzut wartości
mierzonej. Niepewność złożona miernika tablicowego:
Tak więc niepewność złożona u
c
=u
B
. Ponieważ niepewność typu B
wnoszona przez aparaturę pomiarową jest dominująca, w rozkładzie
niepewności dominuje rozkład jednostajny o współczynniku rozszerzenia:
dla poziomu ufności p=1. Czyli ostatecznie niepewność
rozszerzona miernika tablicowego:
C
0392
,
1
)
300
002
,
0
(
3
ZAK
100
2
,
0
ZAK
100
2
,
0
ZAK
100
2
,
0
t
o
2
2
2
2
gr
C
60
,
0
59998
,
0
3
0392
,
1
3
t
u
gr
B
C
60
,
0
6019
,
0
)
60
,
0
(
)
048
,
0
(
u
u
u
o
2
2
2
B
2
A
C
3
k
C
04
,
1
u
k
U
C
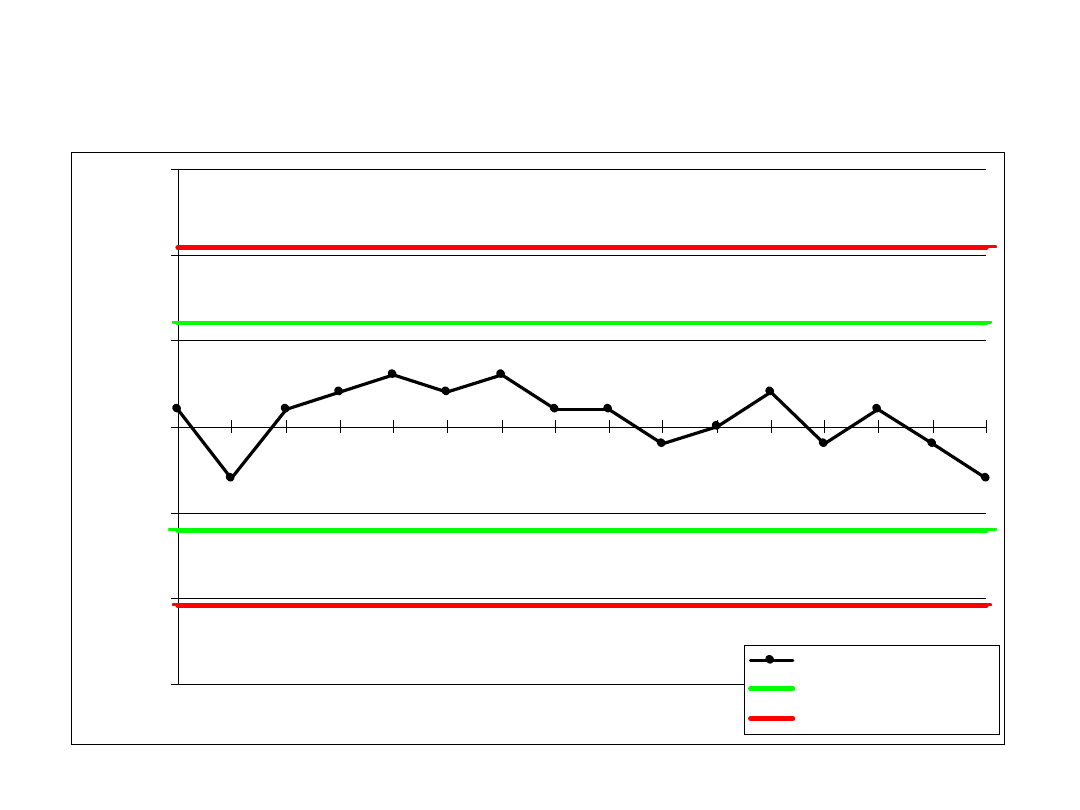
-1,50
-1,00
-0,50
0,00
0,50
1,00
1,50
300 320 340 360 380 400 420 440 460 480 500 520 540 560 580 600
Zakres pomiarowy [°C]
W
ar
to
ść
o
d
ch
yl
en
ia
[
°C
]
wartość pomierzona
niepewność złożona
niepewność rzoszerzona
Na rysunku przedstawiono graficzną interpretację wyników pomiarów
i obliczeń poszcze-gólnych niepewności pomiarowych tablicowego miernika
temperatury.

ZAPIS WYNIKU POMIARU
Wyniki pomiaru
wielkości ciągłych są liczbami przybliżonymi.
Sposób prezentacji wyników powinien umożliwiać ocenę dokładności ich
otrzymania.
Dokładność liczby przybliżonej określa liczba jej cyfr znaczących. Cyfrą
znaczącą jest każda cyfra, z wyjątkiem zer na początku liczby dziesiętnej,
np.:
- liczba 328,01 ma 5 cyfr znaczących,
- liczba 0,023 ma 2 cyfry znaczące,
- liczba 2,30 ma 3 cyfry znaczące,
- licba 5000 ma 4 cyfry znaczące.
Liczbę przybliżoną
zaokrągla się tak, aby zawierała tyle cyfr znaczących, że
tylko cyfra na ostatnim, najmniej znaczącym miejscu jest cyfrą niepewną, a
błąd może wynosić nie wię-cej niż 5 jednostek następnego nieujawnionego
miejsca. Jeżeli wartość rezystancji zapi-sano w postaci 628,1 , to można
wnioskować, że błąd nie przekracza wartości 0,05 .

W pierwszej kolejności
zaokrągla się liczbę wyrażającą granice błędu lub
niepewność pomiaru, zawsze w górę do jednej cyfry znaczącej. Tylko w
szczególnie uzasadnionych przypadkach stosuje się zaokrąglenie do dwóch
cyfr znaczących. Jednym z takich przypadków jest zasada, wg. której liczbę
wyrażającą granice błędu należy zaokrąglać do dwóch cyfr znaczących
wtedy, gdy błąd zaokrąglenia przekracza 20%. Prawidłowe zaokrąglenie
wartości błędów wygląda następująco:
1
= 1,06 ≈ 1,1;
2
= 0,821 ≈ 0,9;
3
= 241 ≈ 3∙10
2
;
4
= 0,0105
≈ 0,011 .
W drugiej kolejności
zaokrągla się liczbę wyrażającą wartość mierzonej
wielkości, zostawiając ostatnią cyfrę znaczącą na tym miejscu, na którym
występuje ostatnia cyfra znacząca oszcowanego błędu. Liczbę tę zaokrągla
się w górę lub w dół, w zależności od wartości odrzucanej cyfry, wg. zasad:
• jeżeli pierwsza z odrzucanych cyfr jest większa od 5, to ostatnią cyfrę
wyniku pomiaru
należy zwiększyć o 1,
• jeżeli pierwsza z odrzucanych cyfr jest mniejsza od 5, to ostatnią cyfrę
wyniku pomiaru
pozostawia się bez zmian,
• jeżeli pierwsza z odrzucanych cyfr jest równa 5 i po niej następuje cyfra
inna niż zero, to ostatnią cyfrę wyniku pomiaru zaokrągla się w górę,
• jeżeli pierwsza cyfra z odrzucanych jest równa 5 i po niej następuje zero,
to ostatnią
cyfrę wyniku pomiaru zaokrągla się do liczby parzystej.

Końcowy wynik pomiaru
, zgodnie z zasadami zapisu niepewności
pomiarowej, może być scharakteryzowany przez podanie niepewności
standardowej złożonej u
c
lub niepewnoś-ci rozszerzonej U, określającej
przedział niepewności wyniku pomiaru wewnątrz którego leży wartość
prawdziwa.
Gdy miarą niepewności jest
niepewność rozszerzona
U = k ∙ u
c
(x), wynik
pomiaru należy przedstawić w formie:
• podać pełną definicję wielkości mierzonej X,
• podać wynik pomiaru jako X = y ± U łącznie z jednostkami,
• podać przyjętą do obliczenia U wartość współczynnika rozszerzenia k,
• podać przybliżoną wartość poziomu ufności związanego z przyjętym
przedziałem
ufności x ± U oraz podać sposób jego wyznaczenia,
• podać gdy zachodzi potrzeba względną niepewność rozszerzoną U/y.
Przykładowo
:
„m
s
=100,02147 ± 0,00047 g, gdzie liczba za symbolem ± jest wartością
niepewności roz-szerzonej U = k ∙ u
c
, obliczonej dla u
c
= 0,35 mg i
współczynnika rozszerzenia k = 2,26 wyznaczonego jako wartość krytyczna
zmiennej losowej rozkładu t Studenta o 9 stop-niach swobody i poziomie
ufności 95%”.

OBLICZANIE I WYRAŻANIE NIEPEWNOŚCI
1.Wyrażenie związku między wielkością mierzoną Y i wielkościami X
i
od
których Y zależy, w postaci funkcji Y = f(X
1
, X
2
,..., X
N
). Funkcja f powinna
zawierać wszystkie wielkości, włączając w to poprawki i współczynniki
poprawkowe uwzględniające oddziaływania, które mogą wnosić znaczące
składowe do niepewności wyniku pomiaru.
2.Wyznaczenie estymat x
i
wartości wielkości wejściowych X
i
albo na
podstawie analizy statystycznej serii obserwacji, albo za pomocą innych
metod.
3.Obliczenie niepewności standardowych u(x
i
) estymat wartości wielkości
wejściowych x
i
. Dla estymat x
i
wyznaczonych:
- na drodze statystycznej analizy serii obserwacji obliczanie niepewności
metodą typu A
- innymi metodami obliczanie niepewności metodą typu B.
4.Obliczenie kowariancji (wzajemnych zależności w pomiarach złożonych)
związanych z estymatami wartości wielkości wejściowych skorelowanych.
5.Obliczenie wyniku pomiaru, to jest estymaty y wielkości mierzonej Y z
zależności funkcyjnej f, dla wartości wielkości wejściowych X
i
równych
estymatom x
i
, wyznaczonym w punkcie 2.
6.Określenie złożonej niepewności standardowej u
c
(y) wyniku pomiaru y na
podstawie niepewności standardowych i kowariancji związanych z
estymatami wartości wielkości wejściowych.
7.Określenie, jeżeli jest to konieczne, niepewności rozszerzonej U służącej
do wyznaczania przedziału <y – U ; y + U>, który powinien obejmować
dużą część rozkładu wartości, które można w sposób uzasadniony
przypisać wielkości mierzonej Y. Niepewność rozszerzona U = ku
c
(y),
gdzie k wybiera się na podstawie żądanego poziomu ufności p oraz
przyjętego rozkładu prawdopodobieństwa.
8.Podanie wyniku pomiaru y wraz z jego złożoną niepewnością standardową
u
c
(y) lub niepewnością rozszerzoną U. Do wyniku pomiaru należy dołączyć
opis sposobu wyznaczenia y i u
c
(y) lub U.
LITERATURA
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
Wyszukiwarka
Podobne podstrony:
MW zaliczenie, Politechnika Poznańska ZiIP, IV semestr, IV semestr, Techniki pomiarowe, TechnikiPom,
Techniki pomiaru procesów psychiznych, oligofrenopedagogika, zachomikowane
ZASTOSOWANIE OSCYLOSKOPU W TECHNICE POMIAROWEJ
milczarski,elektroniczna technika pomiarowa, pomiar kątów
Technika pomiarów
Wykłady z Metrologii, Wykład 3 - Omomierz Metoda Techniczna Pomiaru Rezystancji
Laboratoria z techniki pomiarowej, tech.pom., LABORATORIUM PODSTAW BUDOWY URZĄDZEŃ TRANSPORTOWYCH
Podstawy Technologii Okrętów Podstawy Techniki Pomiarowej
ERGONOMIA, Politechnika Lubelska, Studia, Studia, Techniki pomiarowe, pomiarry, POMIARYy, MORGANY, M
F0-20!, Celem Cwiczenia jest poznanie fizycznych podstaw zjawiska termoelektrycznego i zapoznanie z
SCIAGA Z METROLI, PRZEDMIOT METROLOGIA - ca˙okszta˙t zagadnie˙ zwi˙zanych z technik˙ pomiaru i kontr
12, F-20, Celem Cwiczenia jest poznanie fizycznych podstaw zjawiska termoelektrycznego i zapoznanie
więcej podobnych podstron