Połączenia magistralowe
Wyższa Szkoła Biznesu
Architektura i organizacja
komputerów
Wykład 4
2
Magistrala
Magistrala jest drogą zapewniającą komunikację
między urządzeniami.
Główną cechą charakterystyczną magistrali jest to,
że jest ona wspólnym nośnikiem transmisji (ang.
shared transmission medium). Do magistrali dołącza
się wiele urządzeń, a sygnały wysyłane przez
którekolwiek z nich mogą być odbierane przez
wszystkie pozostałe urządzenia.
Jeśli dwa urządzenia nadawałyby w tym samym
czasie, ich sygnały nakładałyby się i ulegały
zakłócaniu. W określonym czasie może więc
nadawać tylko jedno urządzenie.
3
Magistrala systemowa
Często magistrala składa się z wielu dróg (linii) komunikacyjnych.
Każdą linią mogą być przesyłane sygnały reprezentujące binarne
0 i 1. W ciągu pewnego czasu przez pojedynczą linię może być
przekazana sekwencja cyfr binarnych.
Kilka linii zawartych w magistrali można wykorzystywać razem do
jednoczesnego (równoległego) transmitowania cyfr binarnych. Na
przykład 8-bitowa jednostka danych może być przesyłana przez 8
linii magistrali.
System komputerowy zawiera pewną liczbę różnych magistrali,
które łączą zespoły komputera na różnych poziomach hierarchii.
Magistrala łącząca główne zespoły komputera (procesor, pamięć,
wejście-wyjście) nazywana jest magistralą systemową.
Najczęściej
spotykane
struktury
połączeń
komputera
wykorzystują jedną lub więcej magistrali systemowych.
4
Rodzaje linii
magistralnych
Magistrala systemowa składa się zwykle z 50 do
100 oddzielnych linii.
Każdej linii jest przypisane określone znaczenie
lub funkcja.
Chociaż występuje wiele różnych rozwiązań
magistrali systemowych, zawarte w nich linie
można podzielić na trzy grupy funkcjonalne (rys.
następny slajd): linie danych, adresów i
sterowania.
Ponadto mogą występować linie służące do
zasilania dołączonych modułów.
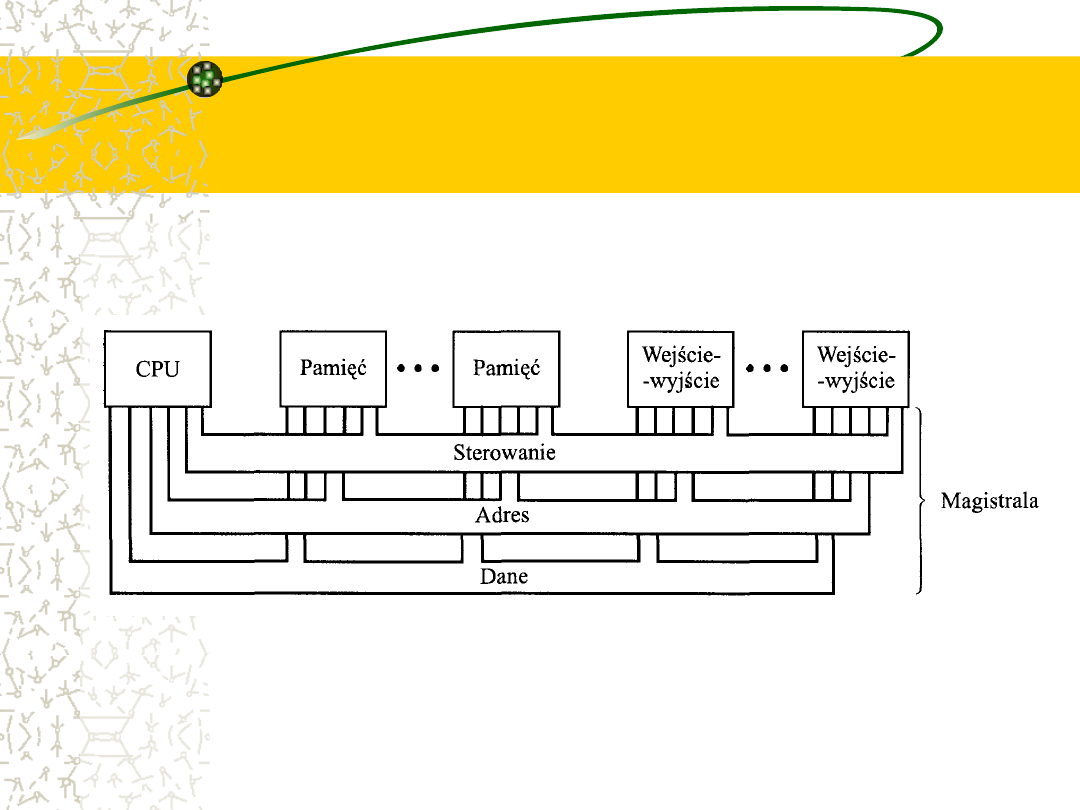
5
Schemat połączenia
magistralowego
6
Linie danych
Są ścieżkami służącymi do przenoszenia danych między
modułami systemu. Wszystkie te linie łącznie są określane
jako szyna danych (ang. data bus).
Szyna danych składa się typowo z 8, 16 lub 32 oddzielnych
linii, przy czym liczba linii określa szerokość tej szyny.
Ponieważ w danym momencie każda linia może przenosić
tylko 1 bit, z liczby linii wnika, ile bitów można jednocześnie
przenosić. Szerokość szyny danych jest kluczowym
czynnikiem określającym wydajność całego systemu. Jeśli
na przykład szyna danych ma szerokość 8 bitów, a każdy
rozkaz ma długość 16 bitów, to procesor musi łączyć się z
modułem pamięci dwukrotnie w czasie każdego cyklu
rozkazu.
7
Linie adresowe
Są wykorzystywane do określania źródła lub
miejsca przeznaczenia danych przesyłanych
magistralą.
Jeśli na przykład procesor ma zamiar odczytać
słowo (8, 16 lub 32 bity) danych z pamięci,
umieszcza adres potrzebnego słowa na linii
adresowej.
Jest jasne, że szerokość szyny adresowej
determinuje maksymalną możliwą pojemność
pamięci systemu.
8
Linie adresowe
Ponadto linie adresowe są również używane do
adresowania portów wejścia-wyjścia.
Najczęściej najbardziej znaczące bity służą do
wybrania określonego modułu na magistrali,
natomiast najmniej znaczące bity określają lokację
w pamięci lub port wejścia-wyjścia wewnątrz
modułu. W przypadku szyny 8-bitowej adres
01111111 i niższe mogą na przykład oznaczać
lokacje w module pamięci (moduł 0), a adres
10000000 i wyższe odnoszą się do urządzeń
dołączonych do modułu wejścia-wyjścia (moduł 1).
9
Linie sterowania
Używa się do sterowania dostępem do linii danych i linii
adresowych, a także do sterowania ich wykorzystaniem.
Ponieważ linie danych i adresowe służą wszystkim
zespołom, musi istnieć sposób sterowania ich
używaniem.
Sygnały sterujące przekazywane między modułami
systemu zawierają zarówno rozkazy, jak i informacje
regulujące czas (taktujące).
Sygnały czasowe określają ważność danych i adresów.
Sygnały rozkazów precyzują operacje, które mają być
przeprowadzone.
10
Typowe linie sterowania
Zapis w pamięci. Sprawia, że dane z magistrali zostają
zapisane pod określonym adresem.
Odczyt z pamięci. Sprawia, że dane spod określonego
adresu są umieszczane w magistrali.
Zapis do wejścia-wyjścia. Sprawia, że dane z magistrali
są kierowane do zaadresowanego portu wejścia-wyjścia.
Odczyt z wejścia-wyjścia. Sprawia, że dane z
zaadresowanego portu wejścia-wyjścia są umieszczane na
magistrali.
Potwierdzenie przesyłania (transfer ACK). Wskazuje, że
dane zostały przyjęte z magistrali lub na niej umieszczone.
11
Typowe linie sterowania
Zapotrzebowanie na magistralę (bus request).
Wskazuje, że moduł zgłasza zapotrzebowanie na przejęcie
sterowania magistralą.
Rezygnacja z magistrali (bus grant). Wskazuje, że
moduł rezygnuje ze sterowania magistralą.
Żądanie przerwania (interrupt request). Wskazuje, że
przerwanie jest zawieszone.
Potwierdzenie przerwania (interrupt ACK). Potwierdza,
że zawieszone przerwanie zostało rozpoznane.
Zegar. Wykorzystywany do synchronizowania operacji.
Przywrócenie (reset). Ustawia wszystkie moduły w stanie
początkowym.
12
Działanie magistrali
Działanie magistrali jest następujące:
Jeśli jeden z modułów zamierza wysłać dane do
drugiego, to musi wykonać dwie rzeczy:
1.
uzyskać dostęp do magistrali
2.
przekazać dane za pośrednictwem magistrali.
Jeśli natomiast zamierza uzyskać dane z innego
modułu, to musi:
1.
uzyskać dostęp do magistrali
2.
przekazać zapotrzebowanie do tego modułu przez
odpowiednie linie sterowania i adresowe. Musi
następnie czekać, aż drugi moduł wyśle dane.
13
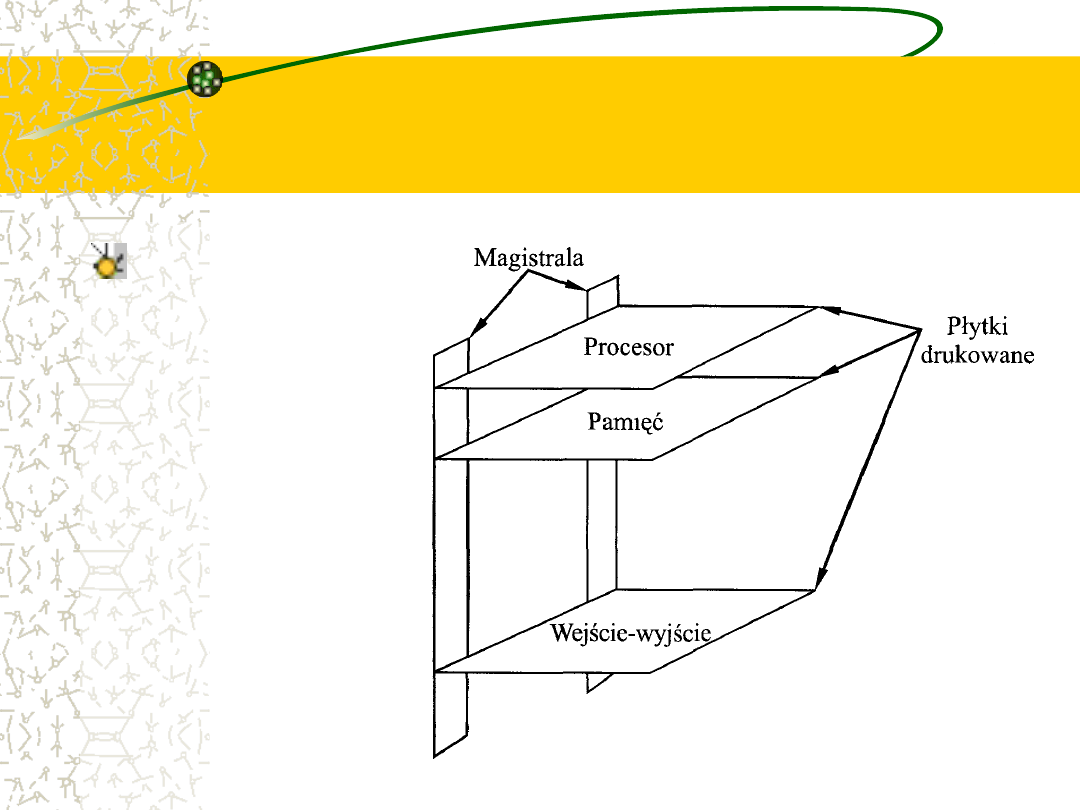
Typowa realizacja fizyczna
architektury
magistralowej
Fizycznie
magistrala
systemowa
jest
zbiorem
równoległych
połączeń
elektrycznych.
Połączenia te
są ścieżkami
wytrawionymi
w
obwodzie
drukowanym.
14
Fizyczna realizacja
architektury
magistralowej
Magistrala rozciąga się przez cały system, a wszystkie
jego zespoły są podłączone do pewnej liczby lub do
wszystkich linii magistrali.
Bardzo
powszechne
rozwiązanie
fizyczne
jest
przedstawione na rys. (poprzedni slajd). W przykładzie
tym magistrala składa się z dwóch pionowych zespołów
połączeń. Wzdłuż tych zespołów połączeń, w regularnych
odstępach są rozmieszczone punkty mocowania w postaci
poziomych gniazd podtrzymujących płytki drukowane.
Każdy z głównych zespołów systemu zajmuje jedną lub
więcej takich płytek i jest połączony z magistralą poprzez
gniazda. Cały ten zestaw jest zamknięty w obudowie.
15
Przyczyny utraty wydajności po
dołączeniu do magistrali wielu
przyrządów
1. Na ogół, im więcej przyrządów dołączono do magistrali, tym
większe jest opóźnienie propagacji. Opóźnienie to określa czas
potrzebny do tego, aby skoordynować wykorzystanie magistrali.
Jeśli sterowanie magistralą przenosi się często od zespołu do
zespołu, to opóźnienia propagacji mogą zauważalnie obniżyć
wydajność.
2. Magistrala może się stać wąskim gardłem, jeśli zapotrzebowanie
na przesłanie zgromadzonych danych zbliża się do pojemności
magistrali. Problemowi temu można do pewnego stopnia
przeciwdziałać, zwiększając szybkość przenoszenia danych przez
magistralę, a także stosując szersze magistrale (np. 64-bitowe
zamiast 32-bitowych). Ponieważ jednak szybkości generowania
danych przez dołączone urządzenia (np. sterowniki grafiki i
wideo, interfejsy sieciowe) wzrastają szybko, przesyłanie
pojedynczą magistralą jest w tym wyścigu skazane na porażkę.
16
Hierarchiczne struktury
wielomagistralowe
W tej sytuacji w większości systemów komputerowych wykorzystuje
się struktury wielomagistralowe o określonej hierarchii.
Typowa struktura tradycyjna jest pokazana na rys. (następny slajd).
Występuje tu lokalna magistrala łącząca procesor i pamięć
podręczną. Może ona wspomagać jedno lub więcej urządzeń
lokalnych. Sterownik pamięci podręcznej łączy tę pamięć nie tylko
do magistrali lokalnej, ale również do magistrali systemowej, do
której są dołączone wszystkie moduły pamięci głównej.
Wykorzystanie struktury pamięci podręcznej uwalnia procesor od
potrzeby częstego dostępu do pamięci głównej. Dzięki temu pamięć
główna może być przesunięta z magistrali lokalnej do systemowej. W
ten sposób wejście-wyjście komunikuje się z pamięcią główną przez
magistralę systemową, nie kolidując z działalnością procesora.
17
Szyny rozszerzenia
Możliwe jest podłączenie sterowników wejścia-wyjścia
bezpośrednio do magistrali systemowej.
Bardziej efektywnym rozwiązaniem jest jednak
wykorzystanie do tego celu jednej lub wielu szyn
rozszerzenia (ang. expansion buses).
Interfejs szyny rozszerzenia buforuje dane przesyłane
między magistralą systemową a sterownikami
wejścia-wyjścia dołączonymi do szyny rozszerzenia.
Rozwiązanie to umożliwia systemowi wykorzystywanie
wielu urządzeń wejścia-wyjścia i jednocześnie
izolowanie ruchu między pamięcią, a procesorem od
ruchu związanego z wejściem-wyjściem.
18
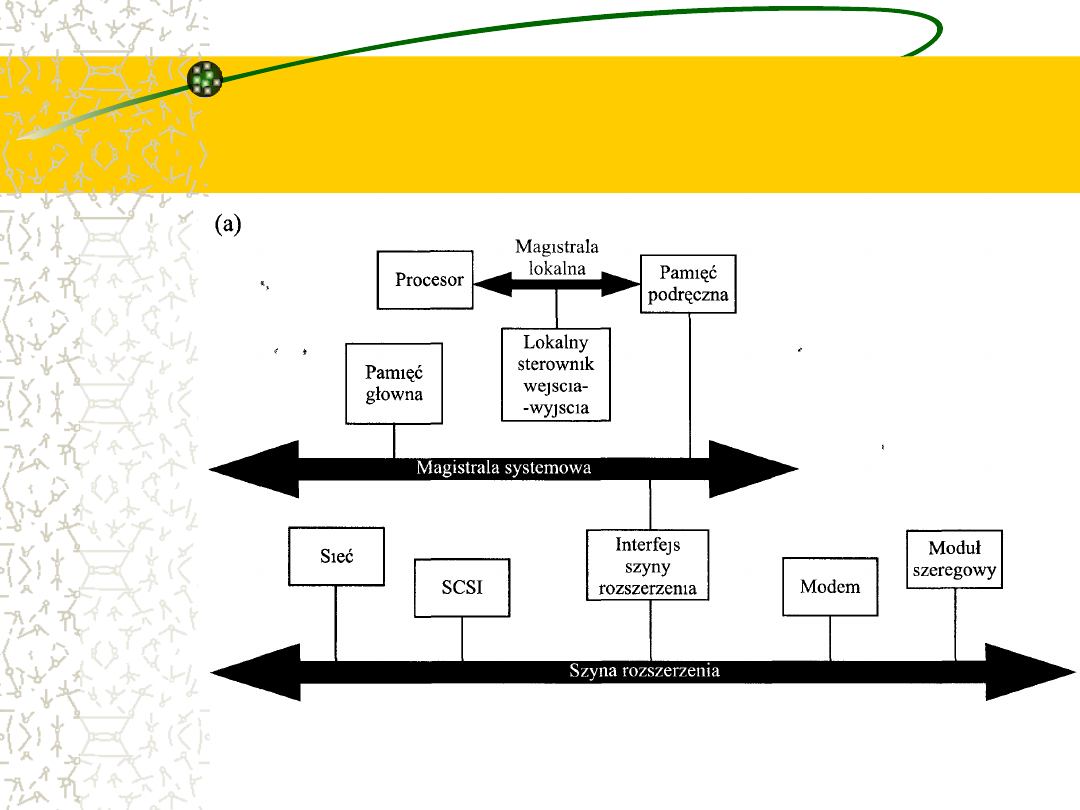
Tradycyjna architektura
magistralowa
19
Tradycyjna architektura
magistralowa
Na rysunku są pokazane typowe przykłady urządzeń wejścia-
wyjścia, które mogą być podłączone do szyny rozszerzenia.
Połączenia sieciowe obejmują sieci lokalne (ang. local area
networks - LANs), takie jak Ethernet, oraz sieci o dużym zasięgu,
takie jak sieć komutacji pakietów (ang. packet-switching
network).
Interfejs SCSI (ang. small computer system interface) sam jest
rodzajem magistrali, która jest wykorzystywana do współpracy z
lokalnymi napędami dysków i innymi urządzeniami peryferyjnymi.
Port szeregowy może być wykorzystywany do współpracy z
modemem, drukarką lub skanerem.
Ta tradycyjna architektura magistralowa jest rozsądnie efektywna,
jednak zaczyna, się załamywać w miarę, jak rośnie wydajność
urządzeń wejścia-wyjścia.
20
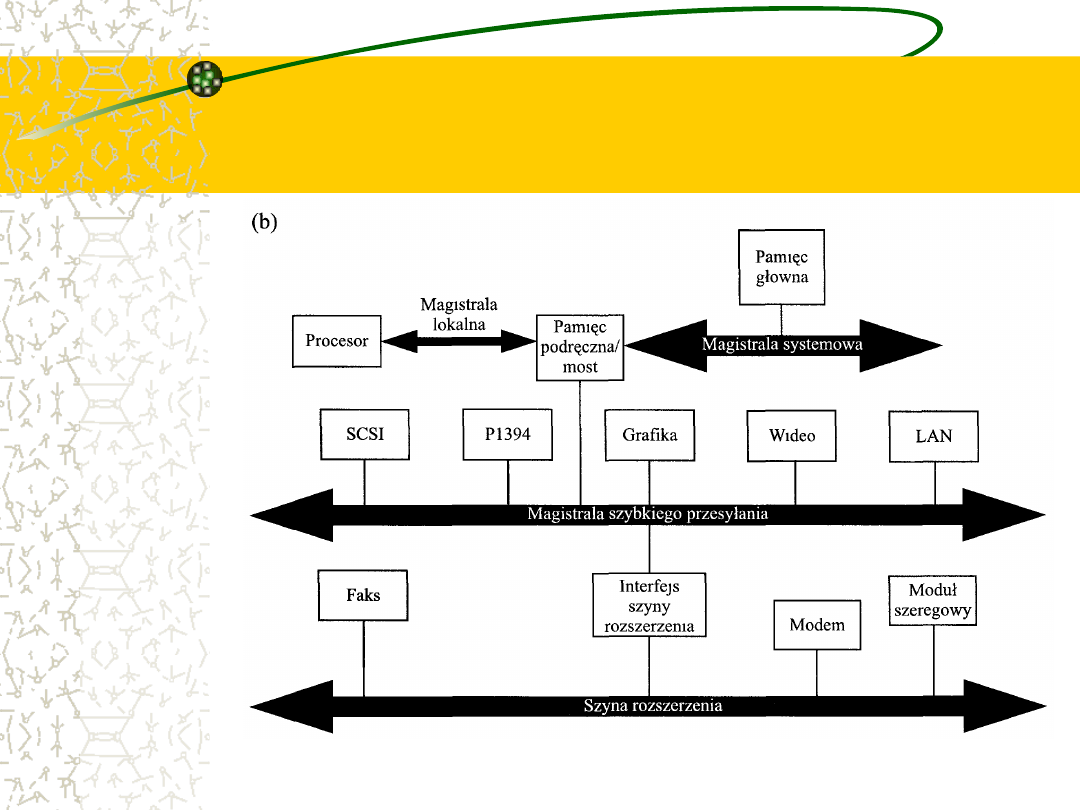
Architektura
międzypiętrowa
W odpowiedzi na to zapotrzebowanie
powszechnym rozwiązaniem przyjmowanym
w przemyśle jest budowanie szybkich
magistrali ściśle zintegrowanych z resztą
systemu, wymagających tylko mostu między
magistralą procesora a magistralą szybką.
Rozwiązanie to jest czasem określane jako
architektura
międzypiętrowa
(ang.
mezzanine architecture).
21
Architektura o dużej
wydajności
22
Architektura
międzypiętrowa
Na rysunku jest pokazana typowa realizacja powyższego
rozwiązania.
Znów występuje tu magistrala lokalna, łącząca procesor ze
sterownikiem pamięci podręcznej, który z kolei jest podłączony
do magistrali systemowej współpracującej z pamięcią główną.
Sterownik pamięci podręcznej jest zintegrowany z mostem
(urządzeniem buforującym) łączącym z magistralą szybką.
Magistrala ta obsługuje połączenia z szybkimi sieciami LAN,
sterowniki urządzeń graficznych i wideo oraz sterowniki
interfejsów z lokalnymi magistralami peryferyjnymi, w tym
SCSI i P1394 (FireWire).
Wolniejsze urządzenia nadal są obsługiwane przez szynę
rozszerzenia z interfejsem buforującym ruch między szyną
rozszerzenia a szybką magistralą.
23
Zalety architektury
międzypiętrowej
Zaletą tego rozwiązania jest to, że szybka
magistrala
ściślej
sprzęga
procesor
z
urządzeniami
wejścia-wyjścia
o
wysokich
wymaganiach, a jednocześnie jest niezależna
od procesora.
Dzięki temu mogą być tolerowane różnice
szybkości procesora i szybkiej magistrali,
a także różne definicje linii sygnałowych.
Zmiany architektury procesora nie wpływają na
szybką magistralę i vice versa.

24
Elementy projektowania
magistrali
Rodzaj
Szerokość
magistrali
specjalistyczna
adres
multipleksowana
dane
Metoda arbitrażu
Rodzaj
transferu
danych
centralny
odczyt
rozproszony
zapis
Koordynacja czasowa
odczyt-modyfikacja-
zapis
synchroniczna
odczyt po zapisie
asynchroniczna
blokowy
25
Rodzaje magistrali
Linie magistralowe mogą być podzielone na dwa
rodzaje:
specjalistyczne
(ang.
dedicated)
i multipleksowane.
Linia specjalistyczna jest trwale przypisana albo
jednej funkcji, albo fizycznie określonym zespołom
komputera.
Przykładem
specjalizacji
funkcjonalnej
jest
zastosowanie oddzielnych, specjalistycznych linii
adresów i danych, co jest powszechne w wielu
magistralach. Nie jest to jednak jedyne rozwiązanie.
26
Multipleksowanie czasowe
Na przykład, adresy i dane mogą być transmitowane
przez ten sam zespół linii przy wykorzystaniu linii
sterowania określającej ważność adresu (Adress Valid).
W tym przypadku każdy moduł ma do dyspozycji
określony odcinek czasu na skopiowanie adresu i
stwierdzenie, czy jest modułem adresowanym.
Adres jest następnie usuwany z magistrali, a te same
połączenia
magistralowe
są
wykorzystywane
do
przenoszenia danych odczytywanych lub zapisywanych.
Ta właśnie metoda używania tych samych linii do wielu
celów jest znana jako multipleksowanie czasowe
(ang. time multiplexing).
27
Zalety i wady
multipleksowania
czasowego
Zaletą multipleksowania czasowego jest
stosowanie mniejszej liczby linii, co pozwala
oszczędzić miejsce i (zwykle) koszt.
Wadą jest to, że wewnątrz każdego modułu
są potrzebne bardziej złożone układy.
Potencjalnie
może
też
nastąpić
zmniejszenie wydajności, ponieważ niektóre
zdarzenia wymagające tych samych linii nie
mogą zachodzić równolegle.
28
Specjalizacja fizyczna
(ang. physical dedication)
Odnosi się do używania wielu magistrali, z których
każda łączy tylko określoną grupę modułów.
Typowym przykładem jest zastosowanie magistrali
wejścia-wyjścia do łączenia wszystkich modułów
wejścia-wyjścia.
Magistrala ta jest następnie łączona z magistralą
główną za pomocą pewnego rodzaju adaptacyjnego
modułu wejścia-wyjścia.
Potencjalną zaletą specjalizacji fizycznej jest duża
przepustowość, ponieważ wypełnienie magistrali jest
mniejsze. Wadą jest zwiększony rozmiar i koszt
systemu.
29
Metoda arbitrażu
We
wszystkich
systemach
z
wyjątkiem
najprostszych więcej niż jeden moduł może
potrzebować przejęcia sterowania magistralą.
Na
przykład
moduł
wejścia-wyjścia
może
wymagać odczytu lub zapisu bezpośrednio w
pamięci, bez wysyłania danych do procesora.
Ponieważ w określonym czasie tylko jeden moduł
może transmitować przez magistralę, potrzebna
jest jakaś metoda arbitrażu.
Możliwe metody można z grubsza podzielić na
scentralizowane i rozproszone.
30
Metoda arbitrażu
W układzie scentralizowanym istnieje jedno urządzenie, zwane
sterownikiem
magistrali
lub
arbitrem,
które
jest
odpowiedzialne za gospodarowanie czasem na magistrali.
Urządzenie to może być oddzielnym modułem lub częścią
procesora.
W układzie rozproszonym centralny sterownik nie występuje.
Każdy moduł zawiera układy logiczne sterujące dostępem, a
moduły współpracują korzystając ze wspólnej magistrali.
W obu metodach arbitrażu celem jest wyznaczenie jednego
urządzenia - albo procesora, albo modułu wejścia-wyjścia -jako
nadrzędnego.
Urządzenie nadrzędne (master) może następnie inicjować transfer
danych z innym urządzeniem, które w tym określonym
przesyłaniu gra rolę podrzędną (slave). W dalszym ciągu tego
wykładu zobaczymy przykłady obu metod arbitrażu.
31
Koordynacja czasowa
Koordynacja czasowa (timing) odnosi się do sposobu, w
jaki koordynowane są zdarzenia na magistrali.
Przy koordynacji synchronicznej występowanie zdarzeń
na magistrali jest wyznaczone przez zegar. Magistrala
zawiera linię zegarową, którą zegar transmituje
regularną sekwencję kolejno zmieniających się zer i
jedynek o takim samym czasie trwania. Pojedyncza
transmisja 1-0 jest nazywana cyklem zegara lub
cyklem magistrali i określa przedział czasowy.
Wszystkie inne urządzenia dołączone do magistrali mogą
odczytywać stan linii zegarowej, a wszystkie zdarzenia
rozpoczynają się równocześnie z cyklem zegara.
32
Operacja
synchronizowana
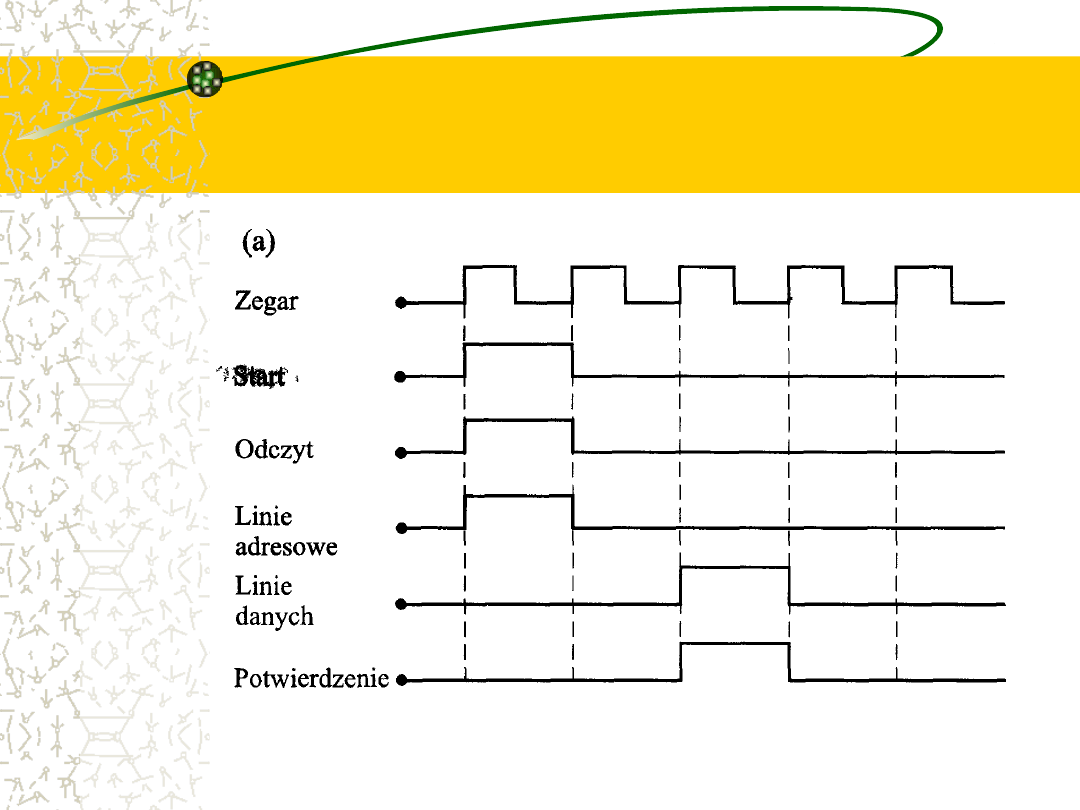
Na rysunku (następny slajd) jest pokazany wykres
czasowy dla synchronicznej operacji odczytu.
Inne sygnały na magistrali mogą się zmieniać w
momencie
narastania
sygnału
zegarowego
(z
nieznacznym opóźnieniem wynikającym z czasu reakcji).
Większość zdarzeń zajmuje tylko jeden cykl zegara. W
tym prostym przykładzie procesor wysyła sygnał odczytu
i umieszcza adres na linii adresowej. Wysyła także
sygnał startu w celu zaznaczenia obecności danych
sterowania i adresu na magistrali. Moduł pamięci
rozpoznaje adres oraz, z opóźnieniem 1 cyklu, umieszcza
dane i sygnał potwierdzenia na magistrali.
33
Przebieg czasowy
synchronizowanej operacji
odczytu
34
Operacja
niesynchronizowana
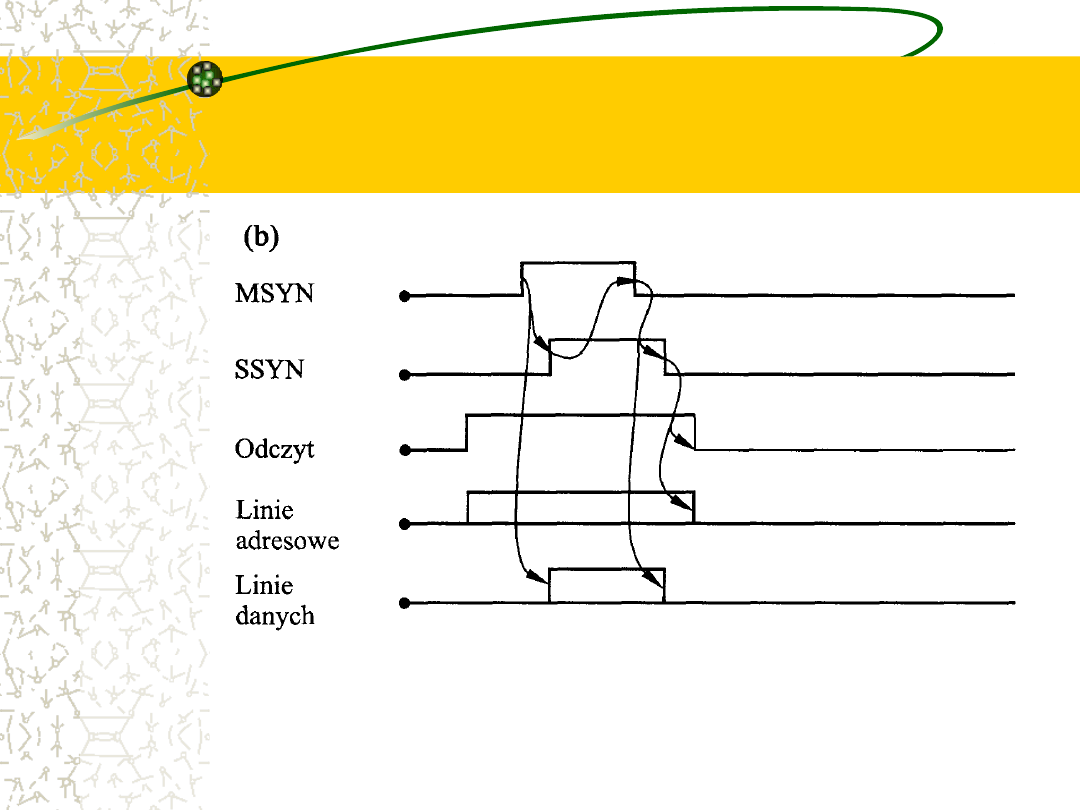
Przy koordynacji asynchronicznej występowanie zdarzeń
na
magistrali
jest
zależne
od
zdarzenia
poprzedzającego.
W prostym przykładzie z rys. na następnym slajdzie
procesor umieszcza sygnały adresu i odczytu na
magistrali.
Po pewnym czasie wymaganym do ustabilizowania
sygnałów, wysyła sygnał synchronizacji nadrzędnej
(master sync - MSYN), wskazując na obecność ważnych
sygnałów adresu i sterowania. Moduł pamięci reaguje,
wysyłając dane oraz sygnał synchronizacji podrzędnej
(slave sync - SSYN), wskazujący na odpowiedź.
35
Przebieg czasowy
asynchronicznej operacji
odczytu
36
Jaka koordynacja czasowa
?
Koordynacja
synchroniczna
jest
łatwiejsza
do
wdrożenia i testowania.
Jest jednak mniej elastyczna niż asynchroniczna.
Ponieważ
wszystkie
urządzenia
dołączone
do
magistrali synchronicznej są zależne od ustalonej
szybkości zegara, system nie może w pełni
wykorzystać postępu w wydajności urządzeń.
Przy koordynacji asynchronicznej magistrala może być
wykorzystywana wspólnie przez urządzenia szybkie i
wolne, wykorzystujące nową i starą technologię.
Zapoznamy się z przykładami koordynacji zarówno
synchronicznej, jak i asynchronicznej.
37
Szerokość magistrali
Wspomnieliśmy
już
o
pojęciu
szerokości
magistrali.
Szerokość szyny danych ma wpływ na wydajność
systemu: im szersza jest szyna danych, tym
większa jest liczba jednocześnie przesyłanych
bitów.
Szerokość szyny adresowej ma również wpływ
na pojemność systemu: im szersza jest szyna
adresowa, tym większa jest ilość miejsc
możliwych do określenia (zaadresowania) w
pamięci.
38
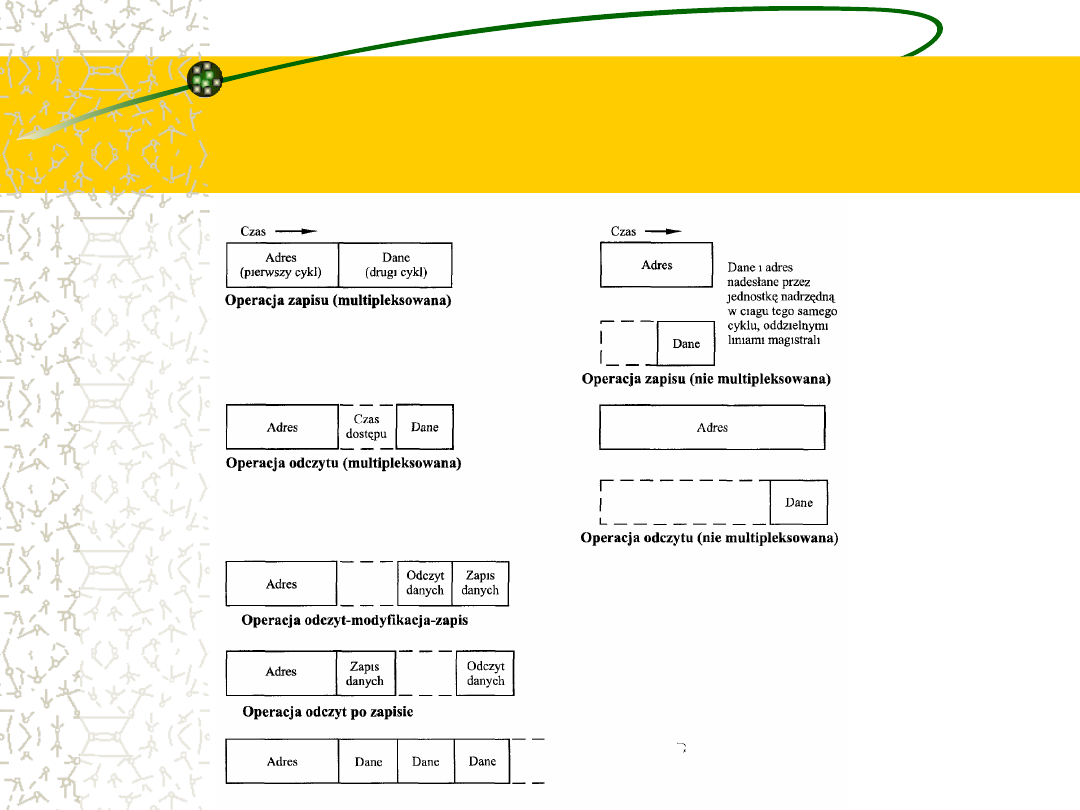
Rodzaje transferu danych
Magistrala służy do przesyłania różnych rodzajów danych, co widać na
rys. (następny slajd).
Wszystkie magistrale obsługują zarówno zapis (transfer od modułu
nadrzędnego do podrzędnego), jak i odczyt (transfer w przeciwnym
kierunku).
W przypadku multipleksowanych szyn adresów i danych szyna jest
najpierw używana do specyfikowania adresu, a następnie do
przesyłania danych.
W operacji odczytu występuje typowe oczekiwanie, podczas gdy dane
są pobierane z modułu podrzędnego i wprowadzane do magistrali.
Zarówno przy zapisie, jak i odczycie może również występować
opóźnienie, jeśli zaistnieje potrzeba arbitrażu, aby przejąć sterowanie
linią w celu wykonania pozostałej części operacji (np. w celu przejęcia
magistrali przy żądaniu odczytu lub zapisu, a następnie ponownego
przejęcia magistrali w celu wykonania odczytu lub zapisu).
39
Rodzaje magistralowego
transferu danych
40
Rodzaje transferu danych
W przypadku specjalistycznych szyn adresów i
danych adres jest lokowany na szynie adresowej i
pozostaje tam w czasie, gdy dane są doprowadzane
do szyny danych.
Przy operacji zapisu moduł nadrzędny umieszcza
dane
na
szynie
danych
natychmiast
po
ustabilizowaniu się adresu, gdy moduł podrzędny ma
możliwość rozpoznania adresu.
Przy operacji odczytu moduł podrzędny umieszcza
dane na szynie danych tuż po rozpoznaniu adresu i
pobraniu danych.
41
Operacje kombinowane
Na
niektórych
magistralach
dopuszczalne
są
operacje
kombinowane.
Operacja odczyt-modyfikacja-zapis jest po prostu odczytem, po
którym natychmiast następuje zapis pod tym samym adresem.
Adres jest rozgłaszany tylko raz, na początku operacji. W
typowym przypadku cała operacja jest niepodzielna w celu
zapobieżenia dostępowi do danych przez inne potencjalne
moduły nadrzędne.
Zasadniczym celem tego rozwiązania jest ochrona zasobów
pamięci w systemach wieloprogramowych.
Odczyt-po-zapisie jest niepodzielną operacją składającą się z
zapisu, po którym natychmiast następuje odczyt z tego samego
adresu. Operacja odczytu może być wykonywana w celu kontroli.
42
Blokowe przesyłanie
danych
Niektóre systemy magistralowe umożliwiają
także blokowe przesyłanie danych.
W tym przypadku po jednym cyklu adresu
następuje n cykli danych.
Pierwsza grupa danych jest przesyłana pod
sprecyzowany adres (lub pobierana pod
tym
adresem),
pozostałe
dane
są
przesyłane pod następne adresy (lub
pobierane pod tymi adresami).
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
Wyszukiwarka
Podobne podstrony:
Architektura i organizacja komuterów W4 Połączenia magistralowe
Architektura i organizacja komuterów W5 Pamięć wewnętrzna
Architektura i organizacja komuterów W3 Działanie komput
Architektura i organizacja komuterów W1 Co to jest i skąd to się wzięło
Architektura i organizacja komuterów W6 Pamięć zewnętrzna
Architektura i organizacja komuterów W7 Wejście Wyjście
Architektura i organizacja komuterów W3 Działanie komputera
Architektura i organizacja komuterów W9 Wspieranie systemu operacyjnego
Architektura i organizacja komuterów 11 Procesor
Architektura i organizacja komuterów W7 Pamięć zewnętrzn
Architektura i organizacja komuterów W8 Wejście Wyjście
Architektura i organizacja komuterów W9 Procesor
Architektura i organizacja komuterów W6 Pamięć wewnętrzn
Architektura i organizacja komuterów W1 i 2 Co to jest i skąd to się wzięło
Architektura i organizacja komuterów W2 Ewolucja i wydaj
Architektura i organizacja komuterów W5 Pamięć wewnętrzna
Podstawy Organizacji Produkcji w4
spr aok ilona2, Wojskowa Akademia Techniczna (WAT) INFORMATYKA, SEM1, Architektura i Organizacja Kom
więcej podobnych podstron