
1
Automatyka i regulacja
automatyczna
Wykład 1
Karol Rumatowski
d1.cie.put.poznan.pl

2
Literatura
1. Kaczorek T.: Teoria układów regulacji automatycznej,
WNT,
Warszawa,1977
.
2. Rumatowski K.: Podstawy automatyki. Część 1. Układy
liniowe o działaniu
ciągłym, Wydawnictwo Politechniki Poznańskiej, Poznań,
2004.
3. Rumatowski K.: Podstawy automatyki. Część 2. Układy
dyskretne. Sygnały
stochastyczne, Wydawnictwo Politechniki Poznańskiej,
Poznań, 2005.
4.
Horla D.” Podstawy automatyki. Ćwiczenia laboratoryjne,
WPP,
Poznań,2005.
5. Pułaczewski J., Szacka K., Manitius A.: Zasady
automatyki, WNT,
Warszawa, 1974.
6. Paraskevopoulos P.N.: Modern Control Engineering,
Marcel Dekker,
Inc., New York, 2002.

3
Cel i zakres wykładów
• Sterowanie i regulacja, obiekt sterowania (regulacji),
urządzenie sterujące (regulator), układ automatycznej
regulacji, sygnały w układach regulacji, układ
automatyki przemysłowej.
• Podział układów automatycznej regulacji.
• Układy liniowe regulacji ciągłej.
• Układy liniowe regulacji dyskretnej.
• Nieliniowe układy regulacji (regulacja dwu- i
trójpołożeniowa).
Cel wykładów: Zapoznanie słuchaczy z zasadami
działania układów automatycznej regulacji i
metodami ich analizy.
Zakres wykładów:
4
Sygnał – wielkość fizykalna będąca funkcją czasu występująca
w układzie sterowania służąca do opisu właściwości układu.
5
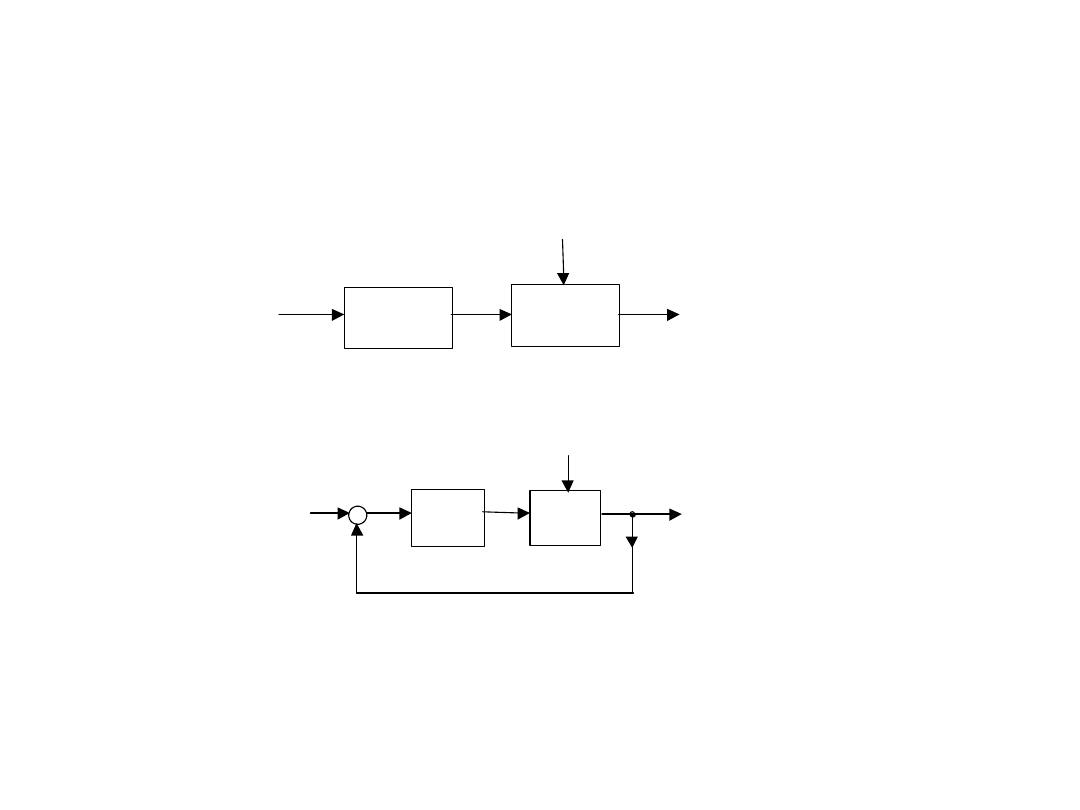
z(t)
u(t)
y(t)
Obiekt
sterowania
Urządzenie
sterujące
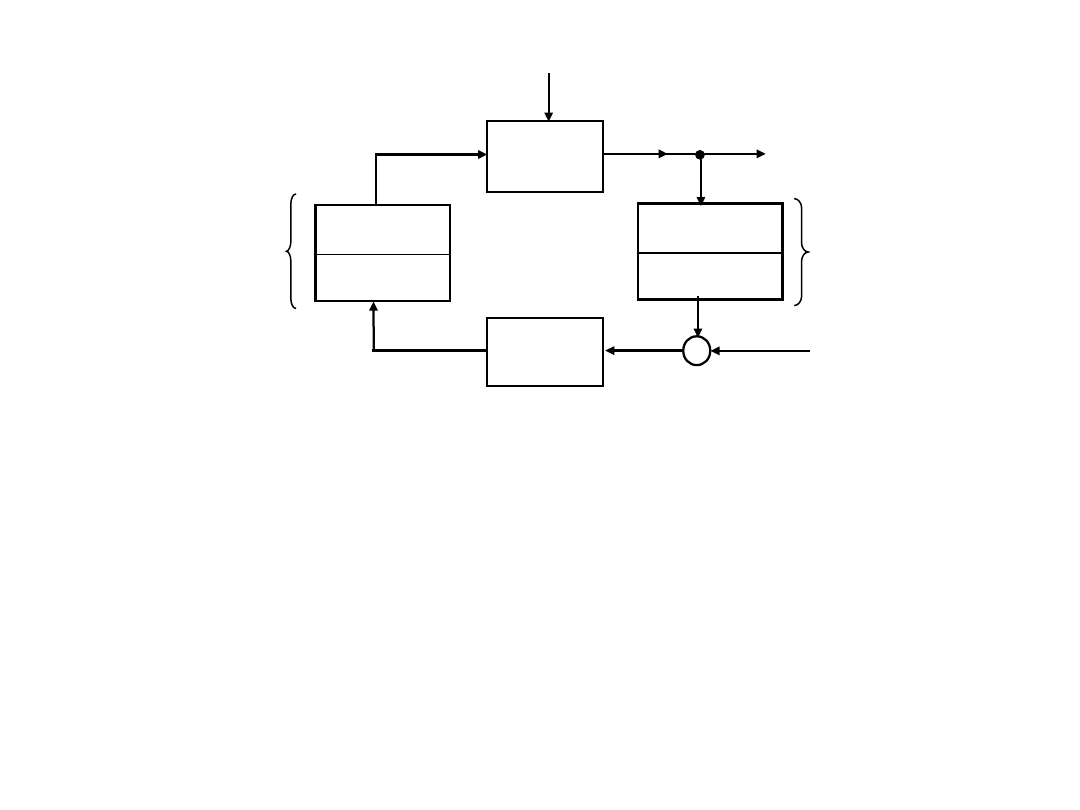
w(t)
z(t)
w(t)
e(t)
u(t)
y(t)
Urządzenie
sterujące
(regulator)
Obiekt
sterowania
(regulacji)
+
tor sprzężenia zwrotnego
–y(t)
Schematy blokowe układów
sterowania
6
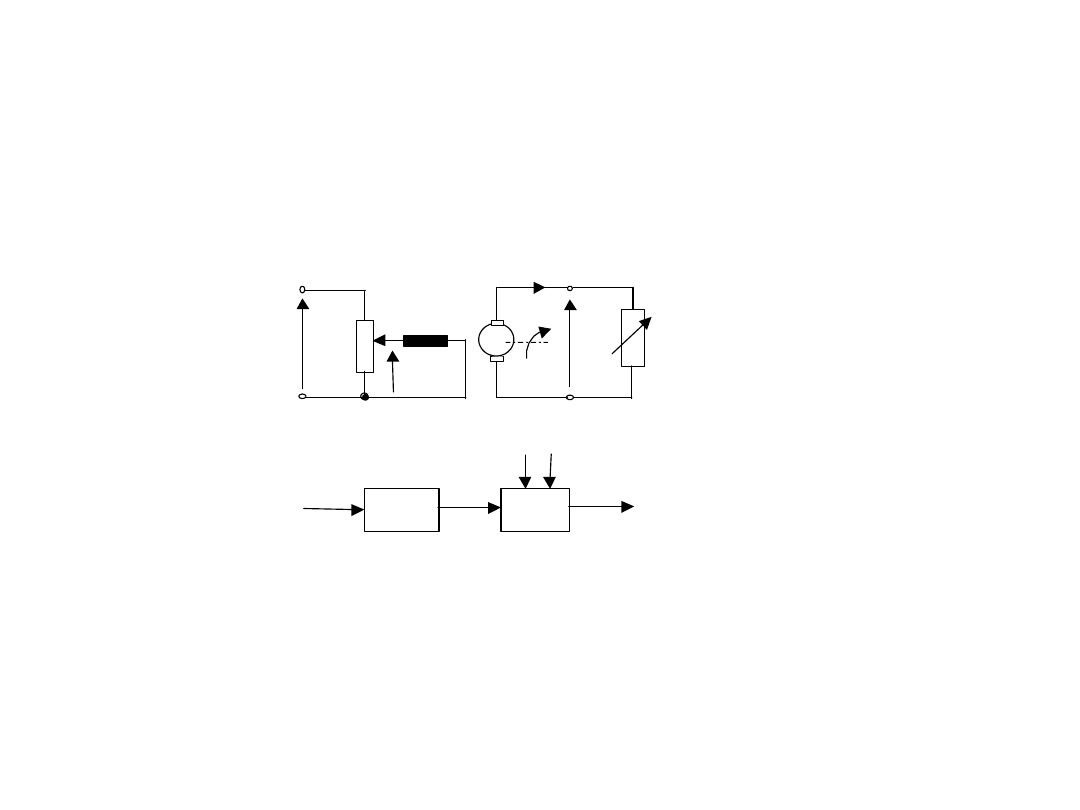
a)
b)
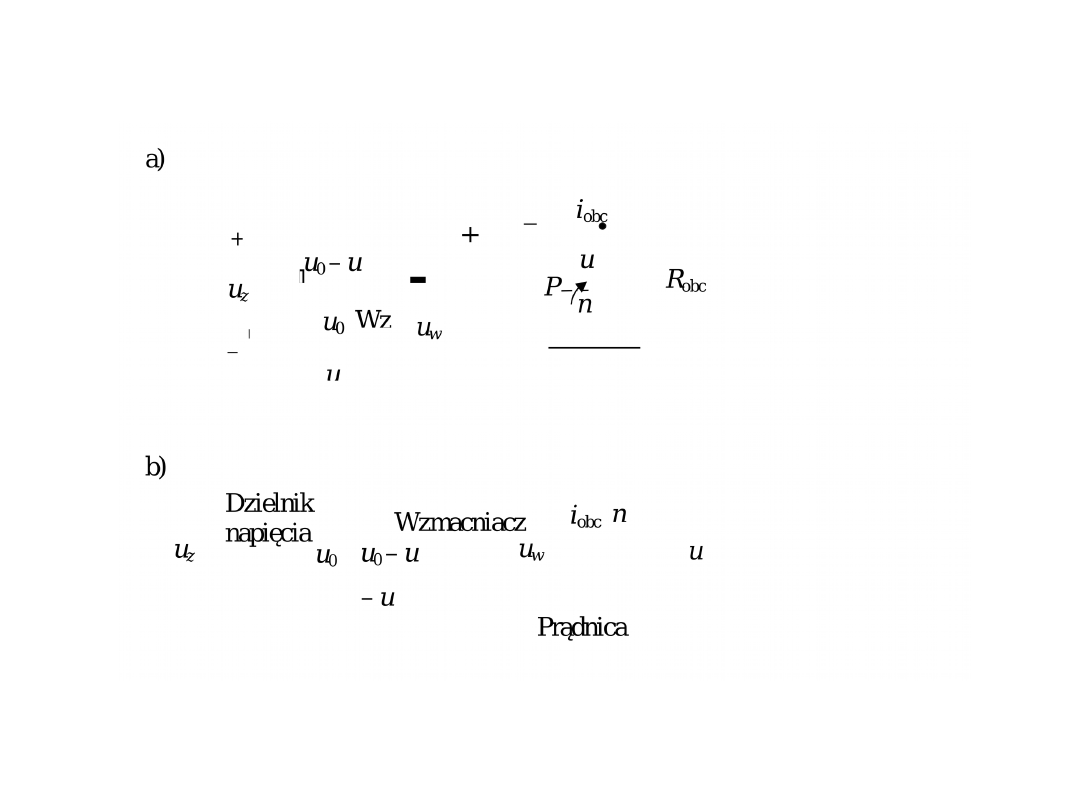
+
_
i
obc
u
w
n
R
obc
u
P
u
z
n
i
obc
u
w
u
z
u
Dzielnik
napięcia
Prądnica
7
8
e(t)
+ w(t)
u(t)
y(t)
Regulat
or
Obiekt
regulac
ji
_
z(t)
Nastawni
kSiłowni
k
Czujnik
Przetworn
ik
Element
pomiaro
wy
Element
wykonawcz
y
y(t) - sygnał regulowany (wielkość regulowana),
w(t) - sygnał zadany (wartość zadana) wielkości
regulowanej,
e(t) - sygnał błędu (uchybu) regulacji,
u(t) - sygnał sterujący (sterowanie),
z(t) - sygnał zakłócający (zakłócenie).

9
Podział układów regulacji automatycznej
Ze względu na właściwości:
• układy ciągłe i dyskretne
• układy liniowe i nieliniowe
• układy stacjonarne i niestacjonarne
• układy jednowymiarowe i wielowymiarowe
• układy o stałych skupionych i o parametrach rozłożonych.
Ze względu na zadanie:
• układy stabilizacji (regulacji stałowartościowej)
• układy regulacji programowej
• układy śledzące.
Ze względu na sposób realizacji sterowania:
• układy zwykłe (nieadaptacyjne)
• układy adaptacyjne
• układy optymalne
• układy nieoptymalne.
Document Outline
Wyszukiwarka
Podobne podstrony:
Automatyczna regulacja zasięgu reflektorów przegląd podzespołów
L2 PAA Modelowanie układu regulacji automatycznej z wykorzystaniem pakietu MATLAB Simulink(1)
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
REGULAMIN KORZYSTANIA Z LABORATORIUM KOMPUTEROWEGO, Automatyka i Robotyka, Język programowania
automaty-sprawko-pid, Temat ćwiczenia: REGULATORY PID
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
Laboratorium automatyki Regulacja impulsowa
Komputer w układzie automatycznej regulacji (2)
Podstawy automatyki (w 3) regula id 366722
Podstawy Automatyki Lab 2014 CW3 Badania regulatora dwupołożeniowego
16 Podstawy automatyki regulatory optymalne
Podstawy automatyki i regulacji cd
10 Automatyka i regulacja automatyczna test
regulamin-lab1a, Semestr IV, Podstawy Automatyki
Systemy pomiarowo-regulacyjne, STUDIA PŁ, TECHNOLOGIA ŻYWNOŚCI I ŻYWIENIA CZŁOWIEKA, ROK II, SEM 3,
ciagle uklady regulacji, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, AUTOMA
1. Zadania i metody automatycznej regulacji, pytania egzamin inżynierski AiR ARS
więcej podobnych podstron