Regulatory
Regulatory
Wyk
ład 3
Wyk
ład 3
Regulatory
Regulatory -- podstawy
podstawy
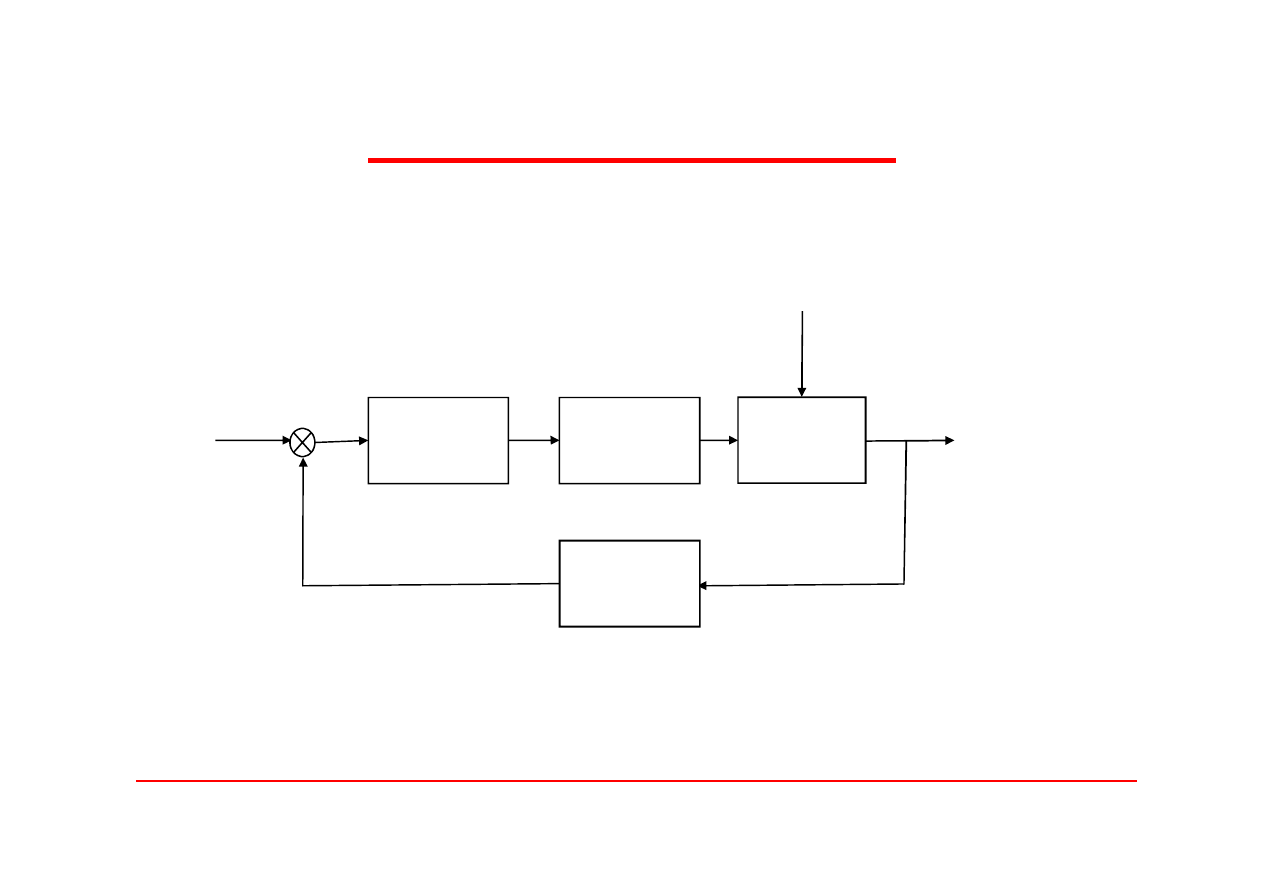
Regulator w uk
ładzie regulacji
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
_
Regulator w uk
ładzie regulacji
Regulator w uk
ładzie regulacji
Regulator jest urz
ądzeniem, którego zadaniem jest:
– porównanie zmierzonej wielko
ści regulowanej y
m
z
wielko
ścią zadaną w i określenie wielkości uchybu
(b
łędu) regulacji e = w - y
m
,
– w zale
żności od odchyłki regulacji, czasu jej trwania oraz
szybko
ści zmian wytworzenie sygnału wyjściowego
zwanego sygna
łem sterującym u o takiej wartości aby
b
łąd regulacji miał dostatecznie małą wartość,
– takie
kszta
łtowanie własności dynamicznych układu
regulacji
aby
uk
ład
by
ł stabilny oraz zapewniał
wymagan
ą jakość regulacji.
Kryteria podzia
łu regulatorów
Kryteria podzia
łu regulatorów
Bior
ąc pod uwagę sposób dostarczenia energii potrzebnej
do nap
ędu elementu wykonawczego wyróżnia się;
– regulatory
bezpo
średniego
dzia
łania,
które
charakteryzuj
ą się tym, że energię potrzebną do napędu
elementu wykonawczego pobieraj
ą z obiektu regulacji za
po
średnictwem elementu pomiarowego (np. regulatory
temperatury, ci
śnienia, przepływu itp.),
– regulatory o dzia
łaniu pośrednim, zasilane w energię
pomocnicz
ą
z
obcego
źródła
(np.
elektryczne,
elektroniczne).
Kryteria podzia
łu regulatorów
Kryteria podzia
łu regulatorów
Regulatory zasilane energi
ą pomocniczą dzieli się na:
- elektryczne i elektroniczne,
- pneumatyczne
- hydrauliczne,
- mechaniczne.
Kryteria podzia
łu regulatorów
Kryteria podzia
łu regulatorów
W zale
żności od postaci sygnału wyjściowego rozróżnia się
regulatory:
- o wyj
ściu (sygnale) ciągłym (ciągła zależność pomiędzy
wielko
ścią regulowaną y a odchyłka regulacji e w
okre
ślonym zakresie nastaw wielkości regulowanej Y
h
,
- o wyj
ściu nieciągłym: dwustawne (załącz/wyłącz), trójstawne
(otwórz/spoczynek/zamknij)
- quasi-ci
ągłe
(kombinacja
regulatora
trójstawnego
z
okre
ślonym napędem).
Pod wzgl
ędem zmiany sygnału wyjściowego można podzielić
regulatory na: analogowe i cyfrowe.
Sygna
ły (wejściowe/wyjściowe) regulatora
Sygna
ły (wejściowe/wyjściowe) regulatora
W
regulatorach
elektrycznych
sygna
ły wprowadzane i
wyprowadzane
z
regulatora
dzielimy
na
sygna
ły
analogowe A oraz sygna
ły cyfrowe D.
W technice grzewczo-wentylacyjnej jako standardowe sygna
ły
analogowe wej
ściowe i wyjściowe stosuje się:
- napi
ęcie o zakresie
0/2 do 10 V,
- pr
ąd
0/4 do 20 mA,
- ci
śnienie (regulatory pneumatyczne) 0,2 do 1,0 bar
W niektórych wykonaniach regulatorów stosuje si
ę jako
wielko
ść analogową wejściową rezystancję mierzoną w Ω.
Sygna
ły cyfrowe wejściowe i wyjściowe interpretowane są jako
informacja lub polecenie za
łącz/wyłącz.
W
łasności dynamiczne regulatorów
W
łasności dynamiczne regulatorów
Podstawowym kryterium podzia
łu regulatorów są ich własności
dynamiczne,
okre
ślające związek pomiędzy sygnałem
wyj
ściowym
a
odchy
łką
regulacji
jako
sygna
łem
wej
ściowym.
Ze wzgl
ędu na własności dynamiczne rozróżniamy regulatory:
- proporcjonalne typu P,
- ca
łkujące typu I,
- proporcjonalno-ca
łkujące typu PI,
- proporcjonalno-ró
żniczkujące typu PD,
- proporcjonalno-ca
łkująco-różniczkujące typu PID.
W
łasności dynamiczne regulatorów
W
łasności dynamiczne regulatorów
Charakterystyka dynamiczna regulatora jest opisywana w
postaci
transmitancji
jako
stosunek
transformaty
U(s)
sygna
łu wyjściowego – wielkości sterującej u(t), do
transformaty E(s) sygna
łu wejściowego – uchybu regulacji
e(t).
)
(
)
(
)
(
s
E
s
U
s
G
r
=
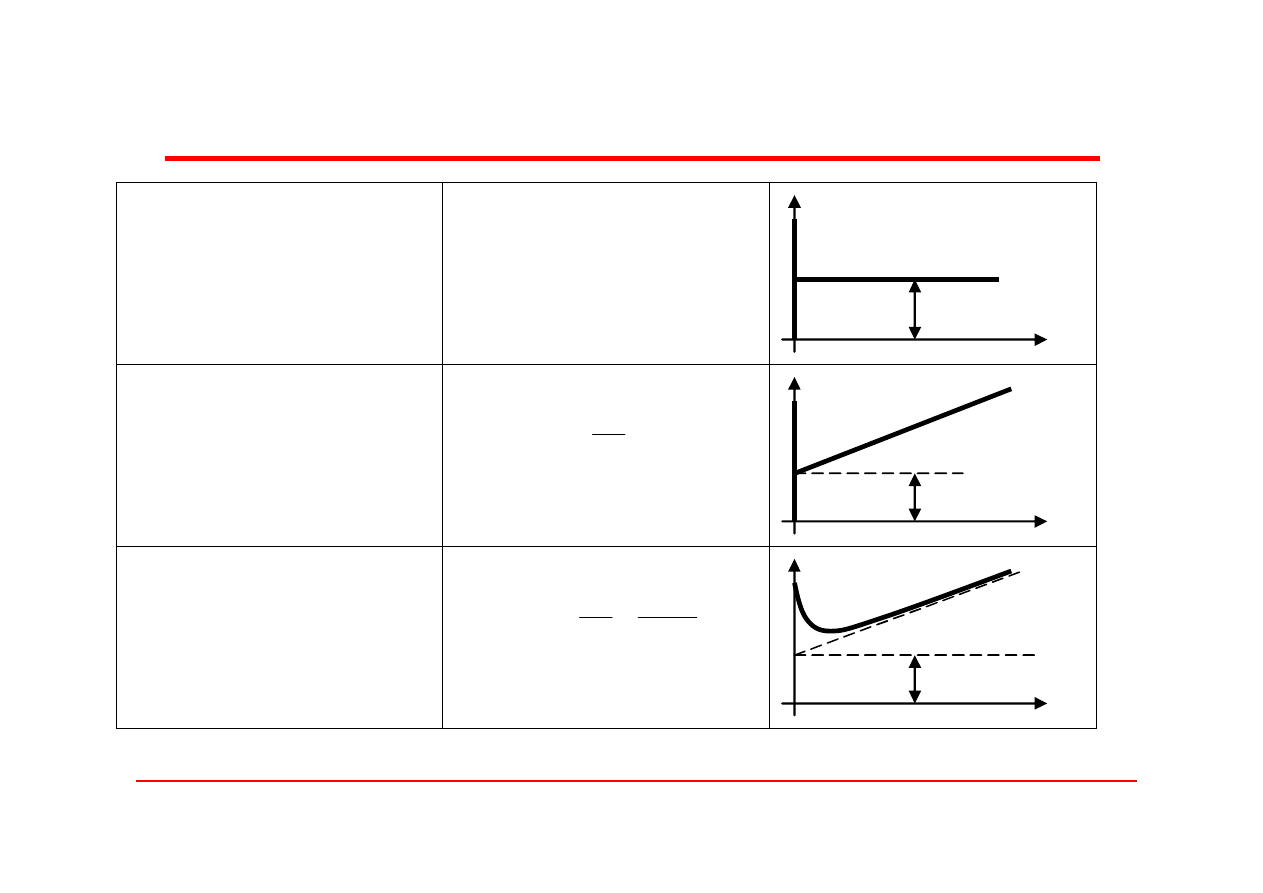
Charakterystyki dynamiczne regulatorów
Charakterystyki dynamiczne regulatorów
W klasycznych sformu
łowaniach podstawowych własności
regulatorów
rozró
żnia się następujące charakterystyki
dynamiczne:
- proporcjonaln
ą (P)
- ca
łkową (I)
p
r
K
s
E
s
U
s
G
=
=
)
(
)
(
)
(
s
K
s
T
s
E
s
U
s
G
p
i
r
=
=
=
1
)
(
)
(
)
(
Charakterystyki dynamiczne regulatorów
Charakterystyki dynamiczne regulatorów
- proporcjonalno-ca
łkową (PI)
- proporcjonalno-ró
żniczkową
(PD)
- proporcjonalno-ca
łkująco-różniczkującą
(PID)
+
=
=
s
T
K
s
E
s
U
s
G
i
p
r
1
1
)
(
)
(
)
(
(
)
s
T
K
s
E
s
U
s
G
d
p
r
+
=
=
1
)
(
)
(
)
(
+
+
=
=
s
T
s
T
K
s
E
s
U
s
G
d
i
p
r
1
1
)
(
)
(
)
(
Charakterystyki dynamiczne regulatorów
Charakterystyki dynamiczne regulatorów
P
K
p
PI
+
s
T
K
i
p
1
1
K
p
K
p
t
u
K
p
t
u
T
i
Charakterystyki dynamiczne regulatorów
Charakterystyki dynamiczne regulatorów
PD
(
)
s
T
K
d
p
+
1
PID – idealny
+
+
s
T
s
T
K
d
i
p
1
1
PID - rzeczywisty
+
+
+
1
1
1
Ts
s
T
s
T
K
d
i
p
t
u
K
p
K
p
t
u
K
p
t
u
Charakterystyki dynamiczne regulatorów
Charakterystyki dynamiczne regulatorów
gdzie:
K
p
– wspó
łczynnik wzmocnienia,
- zakres proporcjonalno
ści,
T
i
– czas zdwojenia (ca
łkowania),
T
d
– czas wyprzedzenia (ró
żniczkowania)
T - nienastawialna sta
ła czasowa ściśle określona dla
rzeczywistego regulatora typu PID.
[ ]
%
100
1
⋅
=
p
p
K
X
Charakterystyki dynamiczne regulatorów
Charakterystyki dynamiczne regulatorów
• Wielko
ści Kp, Ti, Td noszą nazwę nastaw dynamicznych
regulatora.
• W regulatorach z energi
ą pomocniczą można je nastawiać
w pewnych granicach tak aby uzyska
ć najlepszy efekt
regulacji.
• Wspó
łczynnik wzmocnienia Kp zwykle jest zastępowany
zakresem proporcjonalno
ści Xp.
Nastawy dynamiczne regulatora
Nastawy dynamiczne regulatora
Zakres proporcjonalno
ści Xp jest to procentowa część
pe
łnego zakresu zmian wielkości uchybu e, potrzebna do
wywo
łania pełnej zmiany wielkości sterującej u regulatora.
Zakres
proporcjonalno
ści
jest
cz
ęsto
podawany
w
jednostkach
wielko
ści
regulowanej.
Na
przyk
ład
w
przypadku
regulatorów
temperatury
zakres
proporcjonalno
ści podawany jest w kelwinach [K].
Wielko
ść ta oznacza o ile stopni ma się zmienić wielkość
regulowana, aby nast
ąpiła pełna zmiana wielkości sterującej
(np. pe
łne otwarcie/zamknięcie zaworu regulacyjnego).
Nastawy dynamiczne regulatora
Nastawy dynamiczne regulatora
Czas zdwojenia (ca
łkowania) Ti dotyczy regulatorów typu
PI,
których
wielko
ść wyjściowa (sterująca) ma dwie
sk
ładowe: proporcjonalną u
p
oraz ca
łkującą u
i
.
Czas zdwojenia jest to czas potrzebny na to aby sygna
ł
sk
ładowej całkowej będący wynikiem działania całkującego
sta
ł się równy sygnałowi będącemu wynikiem działania
proporcjonalnego.
Sygna
ł wyjściowy z regulatora PI (wypadkowy dla obu
oddzia
ływań) po czasie Ti zwiększa dwukrotnie swoją
warto
ść, stąd pochodzi jego nazwa – czas zdwojenia.
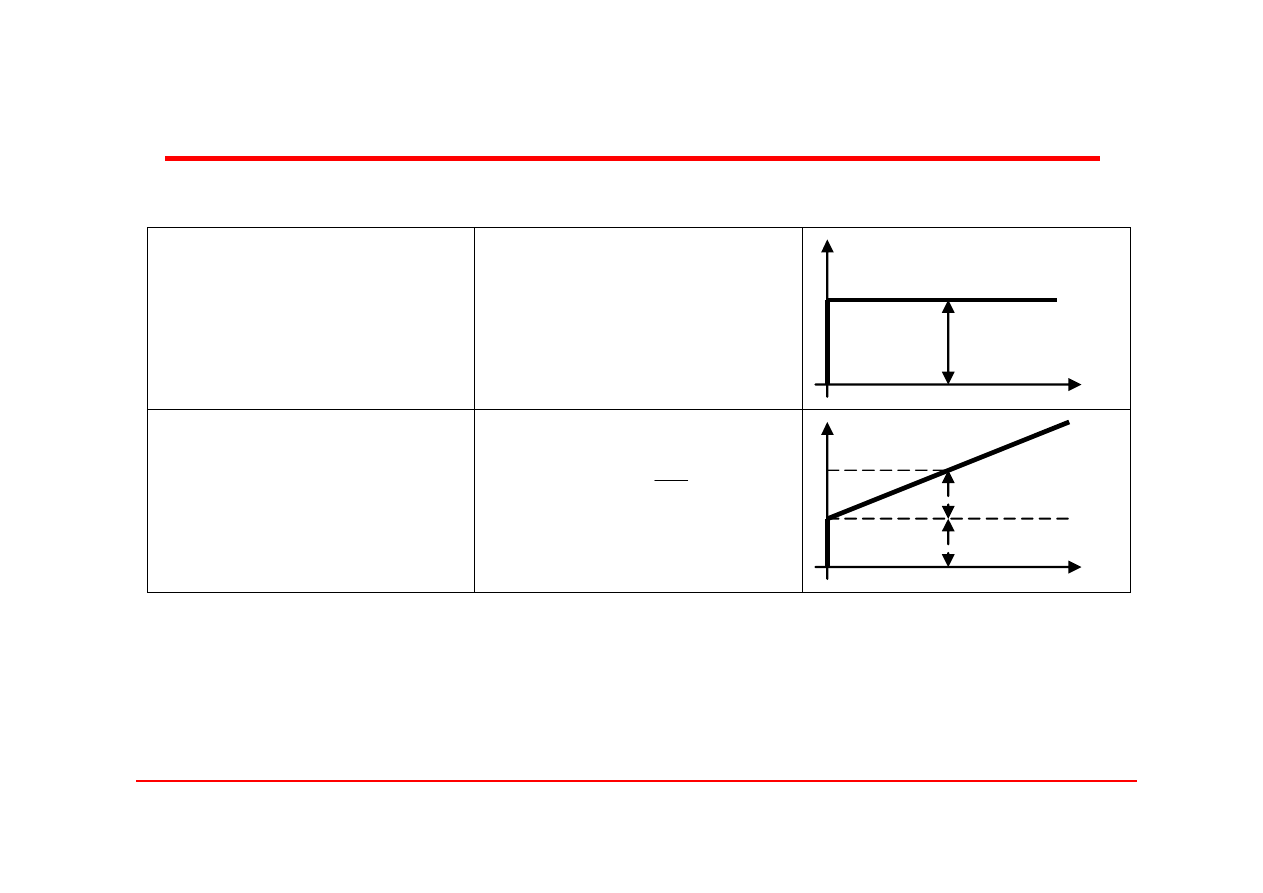
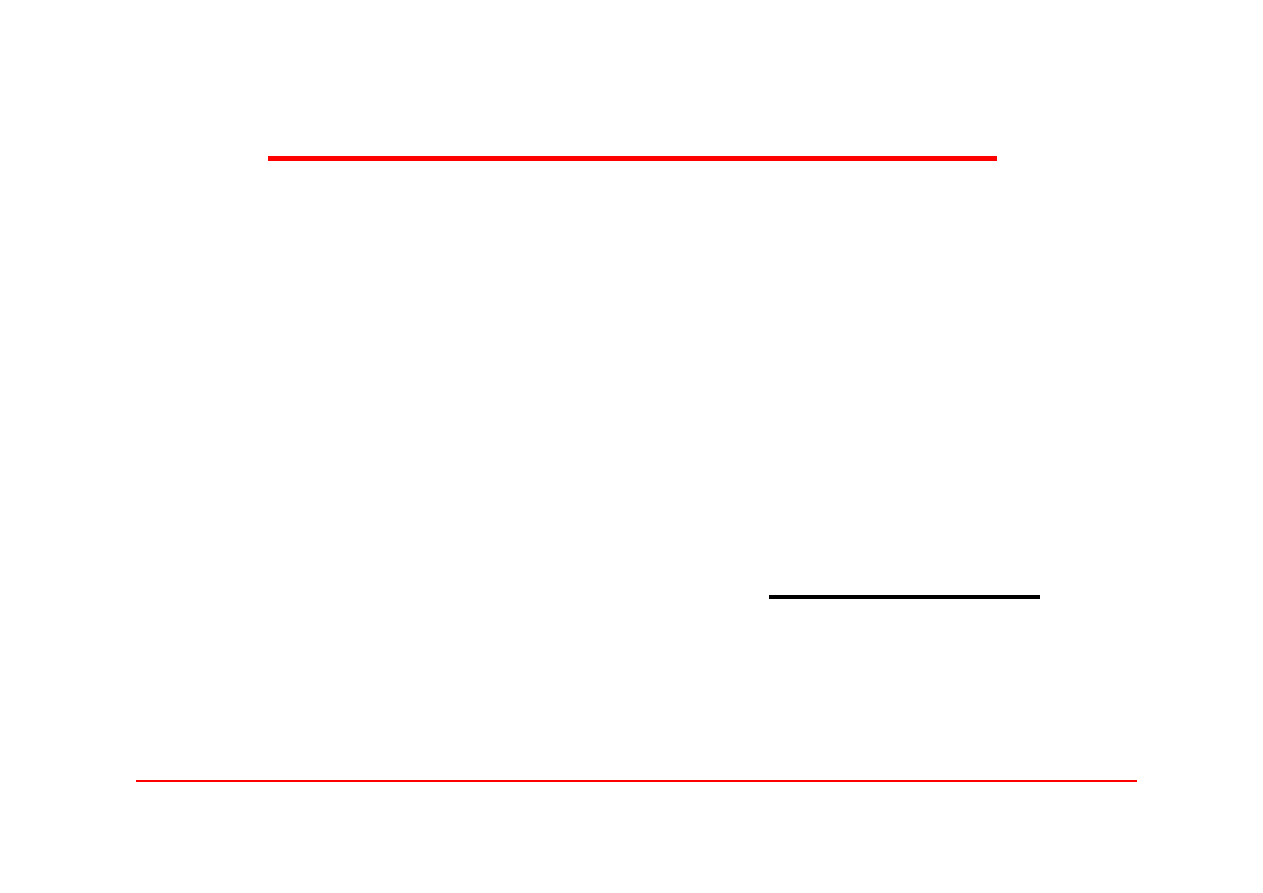
Czas zdwojenia (ca
łkowania) Ti
I.
I.
u
i=
u
p
u
p
t
u
T
i
Δe
t
e
Charakterystyka skokowa regulatora typu PI
Nastawy dynamiczne regulatora
Nastawy dynamiczne regulatora -- czas
czas
wyprzedzenia
wyprzedzenia
Dzi
ęki działaniu różniczkującemu regulator może bardzo silnie
reagowa
ć już na małe zmiany uchybu regulacji e(t), uprzedza więc
dalszy spodziewany wzrost uchybu przez odpowiednie oddzia
ływanie
na obiekt regulacji.
Czas wyprzedzenia Td dotyczy regulatorów PD oraz PID i okre
śla
dzia
łanie różniczkujące regulatora. Sygnał wyjściowy regulatorów tego
typu ma zarówno sk
ładową proporcjonalną u
p
, jak i ró
żniczkującą u
d
.
Czas wyprzedzenia jest to czas, po którym sygna
ł wyjściowy z
regulatora, zwi
ązany z działaniem proporcjonalnym zrówna się z
sygna
łem
pochodz
ącym
od
dzia
łania
ró
żniczkującego.
Czas
wyprzedzenia T
d
wyznaczany jest jako odpowied
ź na zmienny w czasie
uchyb regulacji e(t).
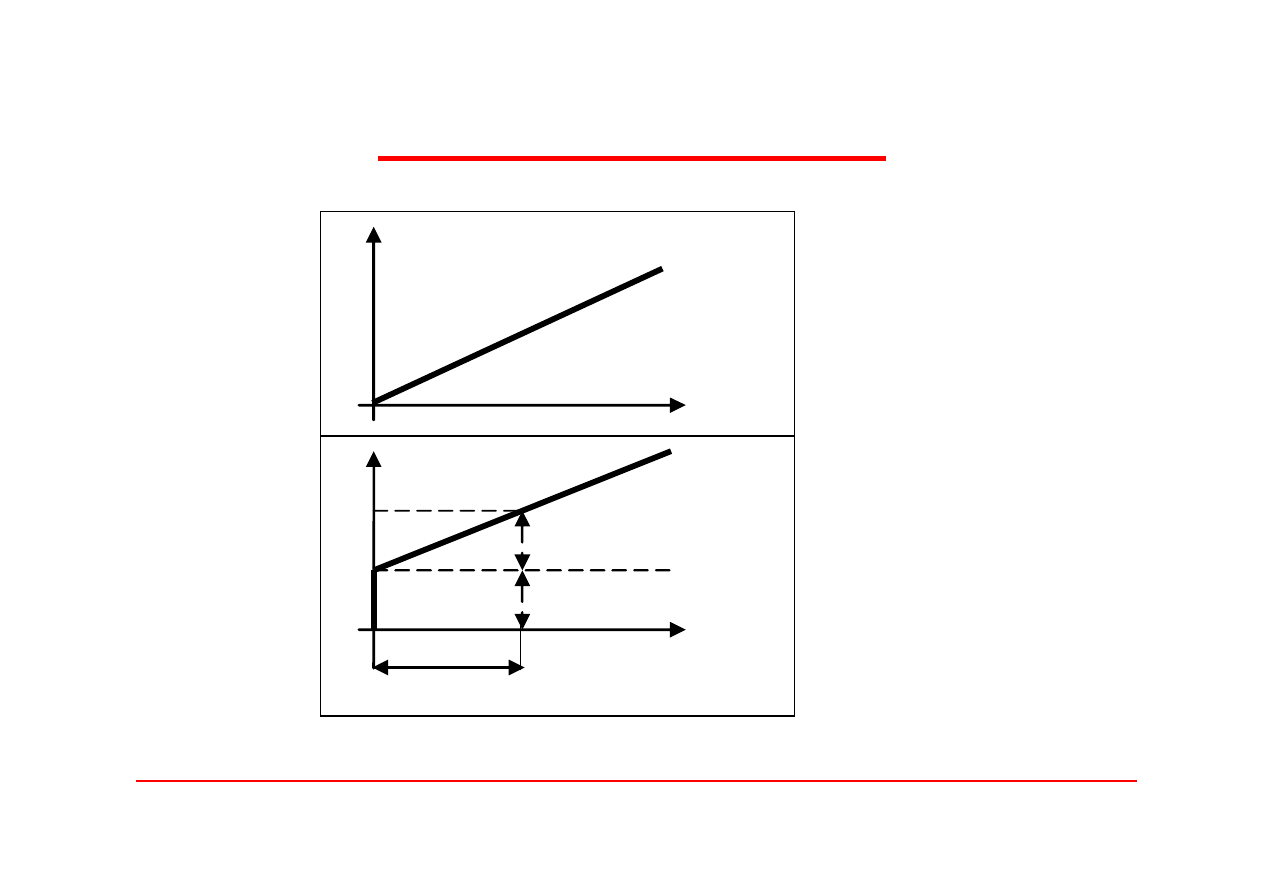
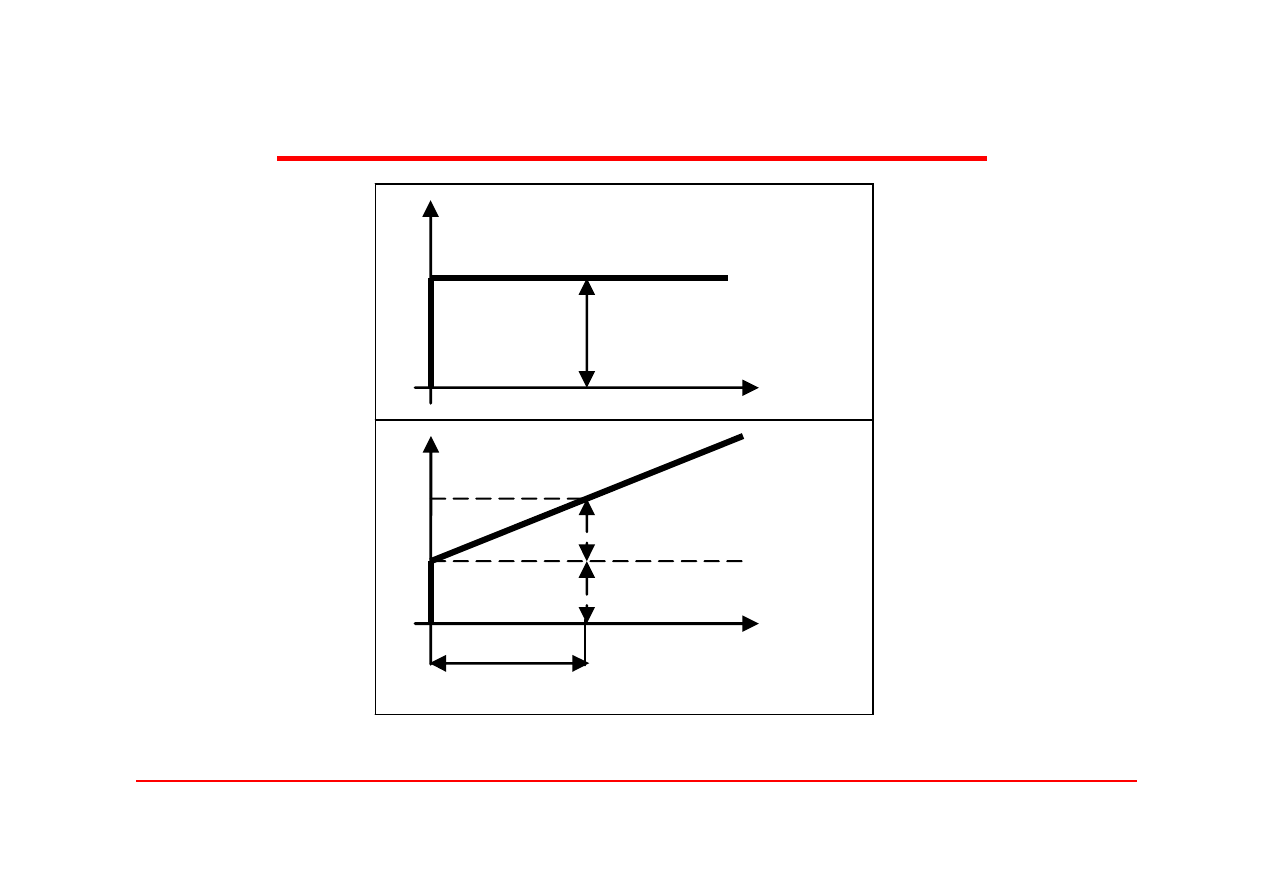
Czas wyprzedzenia Td
I.
I.
u
p=
u
d
u
d
t
u
T
d
t
e
Charakterystyka liniowa PD
Jako
ść regulacji
Jako
ść regulacji
• Ocena jako
ści regulacji polega na analizie dwóch stanów
uk
ładu regulacji:
- stanu przej
ściowego (dokładność dynamiczna)
- stanu ustalonego (dok
ładność statyczna).
• Dok
ładność dynamiczna określa zdolność układu do
wiernego i szybkiego
śledzenia wartości zadanej.
• Dok
ładność statyczna określa zdolność układu do
utrzymywania warto
ści regulowanej jak najbliżej wartości
zadanej w stanie ustalonym tj. po zako
ńczeniu stanu
przej
ściowego.
Jako
ść regulacji
Jako
ść regulacji
Uzyskanie wysokiej jako
ści regulacji uwarunkowane jest
mi
ędzy innymi optymalnym doborem nastaw regulatora.
U
żytkownik ocenia zaprojektowany i zoptymalizowany układ
regulacji analizuj
ąc:
- stabilno
ść układu,
- statyczny uchyb regulacji,
- przeregulowanie,
- czas regulacji (ustalania).
Jako
ść regulacji
Jako
ść regulacji
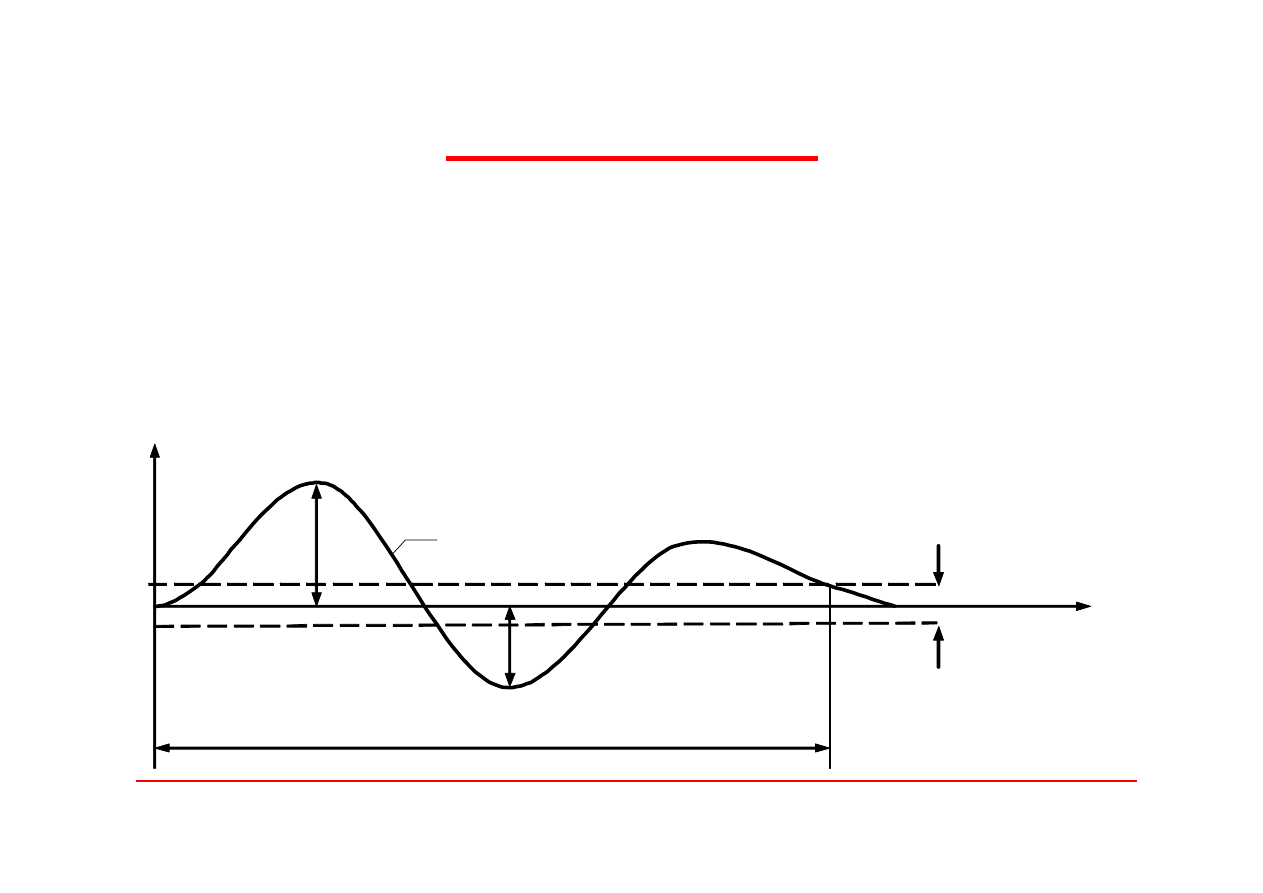
Na
rysunku
pokazano
przyk
ładowy przebieg odchyłki
regulacji spowodowany zak
łóceniem działającym na układ,
na
którym
zaznaczono
wa
żniejsze wskaźniki jakości
regulacji:
e
-
odchy
łka regulacji,
e
max
-
odchy
łka
maksymalna,
e
1
- odchy
łka o przeciwnym znaku do
e
max
,
t
r
- czas regulacji
t
e
+
Δe
-
Δe
t
r
e
m
a
x
e(t)
Δe = 2 % lub 5%
e
1
Jako
ść regulacji
Jako
ść regulacji
• Uk
ład jest stabilny, gdy wymuszenie lub zakłócenie
powoduje tylko chwilowe wytr
ącenie układu ze stanu
równowagi.
• Statyczny uchyb regulacji e jest to najwi
ększa różnica
pomi
ędzy wartością sygnału zadanego w i aktualną
warto
ścią sygnału regulowanego y zmierzona w stanie
ustalonym.
e = w – y
• Przeregulowanie
ε
to procentowa warto
ść maksymalnego
uchybu e
1
o znaku przeciwnym do uchybu pocz
ątkowego,
odniesiona do maksymalnego uchybu pocz
ątkowego e
max
(rys.).
%
100
max
1
⋅
=
e
e
ε

Jako
ść regulacji
Jako
ść regulacji
• Czasem regulacji tr nazywa si
ę czas, po upływie którego
warto
ść uchybu e(t) nie przekracza wartości dopuszczalnej
Δe.
• Najcz
ęściej przyjmuje się
Δe w wysokości 2% wartości
zadanej w (ustalonej – y(
∞)).
Dobór nastaw regulatora PID
Dobór nastaw regulatora PID
• Wymagan
ą
jako
ść
regulacji
mo
żna
uzyska
ć
dzi
ęki
odpowiedniemu
doborowi
nastrajanych
wielko
ści
nazywanych nastawami regulatora.
• W
przypadku
regulatorów
PID
s
ą
to:
zakres
proporcjonalno
ści Xp, czas zdwojenia (całkowania) Ti oraz
czas wyprzedzenia (ró
żniczkowania) Td.
• Opracowano wiele metod doboru nastaw regulatorów.
• Najprostsza do stosowania jest metoda opublikowana w
1941 roku przez ameryka
ńskich inżynierów J.G. Zieglera i
N.B. Nicholsa .
• Jest to metoda oparta na minimalizacji ca
łki z modułu
uchybu regulacji (kryterium ca
łkowe)
Dobór nastaw regulatora PID
Dobór nastaw regulatora PID
• Korzystanie z metody Zieglera - Nicholsa wymaga
wprowadzenia
dwóch
poj
ęć:
wzmocnienia
krytycznego K
pkr
oraz okresu drga
ń krytycznych
T
osc
.
• Wzmocnienie krytyczne K
pkr
jest to wzmocnienie
regulatora
proporcjonalnego,
który
po
łączony
szeregowo z obiektem spowoduje znalezienie si
ę
uk
ładu regulacji na granicy stabilności, a więc
pojawienie si
ę niegasnących drgań okresowych.
Okres tych drga
ń nazywany jest okresem drgań
krytycznych Tosc.
Dobór nastaw regulatora PID
Dobór nastaw regulatora PID
Podczas realizacji doboru nastaw nale
ży:
• Regulator PID ustawi
ć na działanie P nastawiając:
T
i
= T
imax
, T
d
= T
dmin
.
• Zwi
ększać
powoli
warto
ść
wspó
łczynnika
wzmocnienia Kp
regulatora a
ż do momentu
pojawienia si
ę niegasnących oscylacji na wyjściu z
uk
ładu, co jest równoznaczne z osiągnięciem
granicy stabilno
ści.
• Zanotowa
ć wartość współczynnika wzmocnienia
Kp= Kpkr
przy którym wyst
ąpiły niegasnące
oscylacje i zmierzy
ć okres tych oscylacji T
osc
.
Dobór nastaw regulatora PID
Dobór nastaw regulatora PID
Zale
żnie od typu regulatora oblicza się wartości nastaw
korzystaj
ąc ze wzorów:
regulator P: Kp=0,5 Kpkr;
regulator PI: Kp=0,45 Kpkr,
Ti= 0,85 Tosc;
regulator PID:Kp=0,6 Kpkr,
Ti= 0,5 Tosc, Td=0,125Tosc.
Dobór nastaw regulatora PID
Dobór nastaw regulatora PID
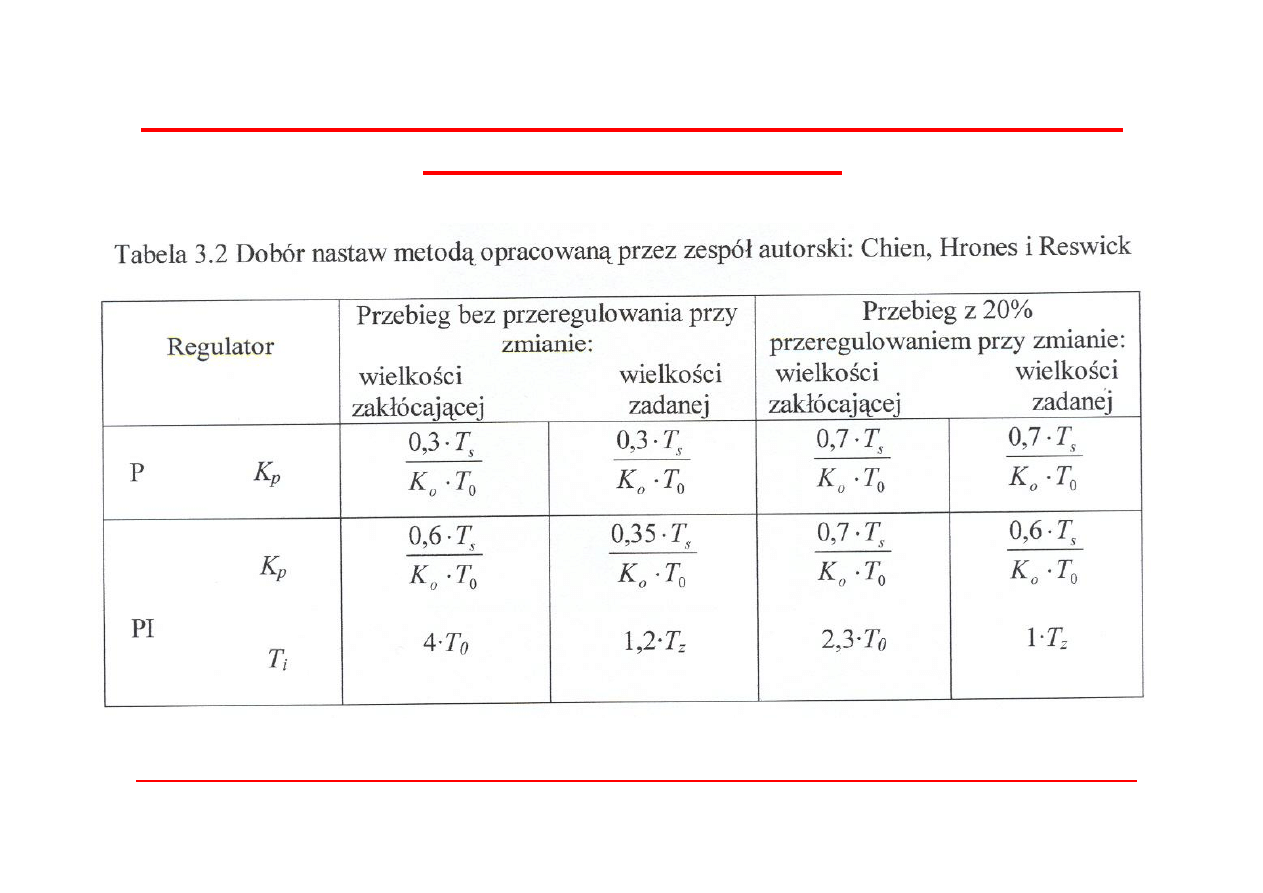
Dla uk
ładów regulacji o znanym modelu matematycznym lub
charakterystyce dynamicznej obiektu regulacji (znana sta
ła
czasowa obiektu Tz, opó
źnienie To i wzmocnienie Ko )
Chien, Hrones i Reswick
opracowali metod
ę pozwalającą
na
obliczenie
optymalnych
nastaw
wed
ług
wzorów
podanych w tabeli 3.2.
Zale
żności te dotyczą dwu przypadków :
1. Przebieg wielko
ści regulowanej w zamkniętym układzie
regulacji po skokowym
wymuszeniu zmiany wielko
ści
zadanej bez przeregulowania i z przeregulowaniem 20%
(rys. 3.3 a).
2. Przebieg wielko
ści regulowanej w zamkniętym układzie
regulacji po skokowym
wymuszeniu zmiany wielko
ści
zak
łócającej z maksymalnie jednym przeregulowaniem lub
przeregulowaniem wielokrotnym (rys. 3.3 b).
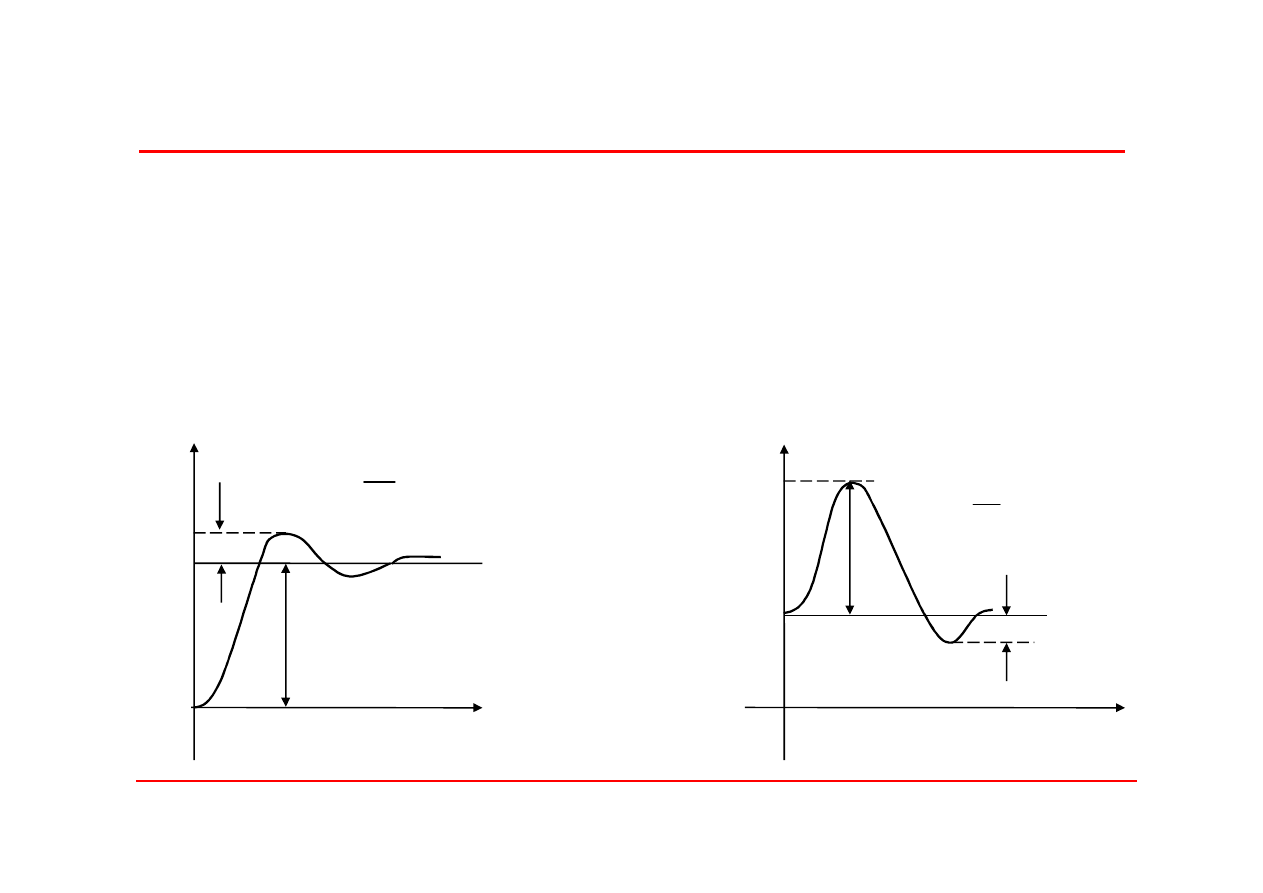
Przebieg wielko
ści regulowanej z 20 % przeregulowaniem
Przebieg wielko
ści regulowanej z 20 % przeregulowaniem
• a – odpowied
ź na skokowa zmianę wielkości zadanej,
•
b – odpowied
ź na skokową zmianę wielkości zakłócającej
y
w
2
w
1
e
2
e
1
e
1
e
2
τ
τ
w
y
a
b
2
,
0
1
2
=
e
e
2
,
0
1
2
=
e
e
Dobór nastaw metod
ą opracowaną przez zespół autorski:
Dobór nastaw metod
ą opracowaną przez zespół autorski:
Chien
Chien,
, Hrones
Hrones i
i Reswick
Reswick
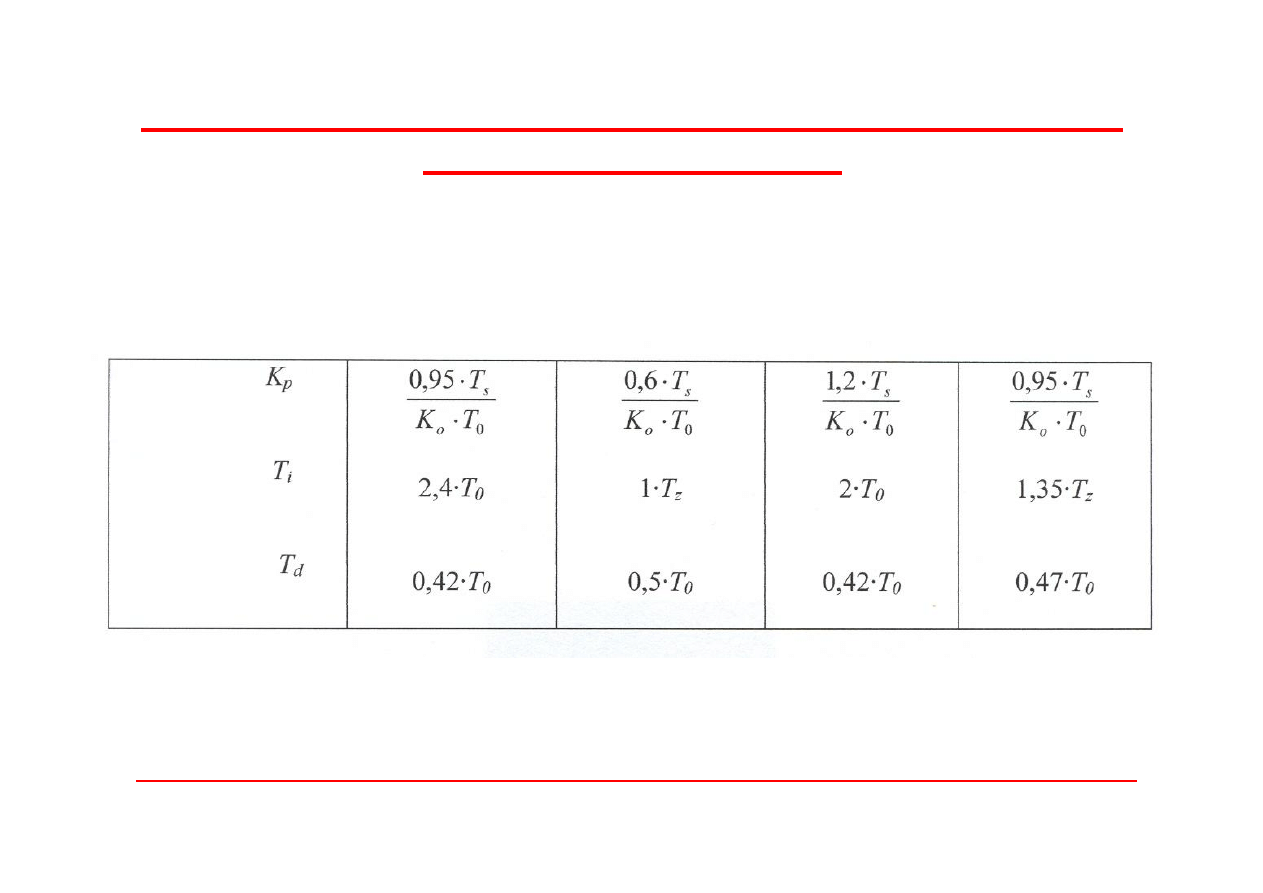
Dobór nastaw metod
ą opracowaną przez zespół autorski:
Dobór nastaw metod
ą opracowaną przez zespół autorski:
Chien
Chien,
, Hrones
Hrones i
i Reswick
Reswick
PID
Dobór nastaw regulatorów cyfrowych
• Zasadnicza ró
żnica pomiędzy metodami doboru nastaw
regulatorów analogowych i cyfrowych polega na tym,
że w
obliczeniach
nastaw
regulatorów
cyfrowych
nale
ży
uwzgl
ędnić częstotliwość próbkowania (ze względu na
próbkowanie
sygna
łów w regulatorach cyfrowych co
ustalony odst
ęp czasu - cykliczny charakter pracy),
Dobór nastaw regulatora PID
Dobór nastaw regulatora PID-- samostrojenie
samostrojenie
• Nowoczesne
regulatory
cyfrowe
posiadaj
ą
funkcj
ę
samoadaptacji
(samostrojenia),
umo
żliwiającą każdemu
obwodowi regulacji automatyczne strojenie warto
ści zakresu
proporcjonalno
ści,
czasu
zdwojenia
(sta
ła
czasowa
ca
łkowania) i czasu wyprzedzenia (stała różniczkowania).
•
Funkcja samostrojenia powinna by
ć uruchamiana przy
ustalonym stanie obiektu. Jej w
łączenie spowoduje zmiany
typu zw
łocznego w obwodzie regulacji i system rozpocznie
oscylacj
ę. Regulator będzie monitorował oscylacje i po
oko
ło 5 oscylacjach zostaną obliczone parametry strojenia.
•
Czas potrzebny do zako
ńczenia samostrojenia zależy od
szybko
ści zmian danego systemu. Minimalny czas dla
szybkiego systemu to oko
ło 10 minut, ale dla wolniejszego
systemu mo
że przekroczyć 40 minut.
Dzi
ękuję za uwagę !
Dzi
ękuję za uwagę !
Wyszukiwarka
Podobne podstrony:
16 Podstawy automatyki regulatory optymalne
Podstawy automatyki i regulacji cd
Ćw.2.Cyfrowy regulator PID, Elektrotechnika - notatki, sprawozdania, podstawy automatyki i regulacji
podstawy automatyki regulacja sprawozdanie
Chorowski,podstawy automatyki, regulatory
Podstawy Automatyki Laborator Opracowanie id 72970
Podstawy Automatyki Lab 2014 CW3 Badania regulatora dwupołożeniowego
regulamin-lab1a, Semestr IV, Podstawy Automatyki
syposz,podstawy automatyki, DOBÓR NASTAW REGULATORÓW
syposz,podstawy automatyki, CHARAKTERYSTYKI ZAWORÓW REGULACYJNYCH
Podstawy automatyki id 366718 Nieznany
Podstawy Automatyki Lab - 2010 - CW6, Badanie regulatora
Chorowski,podstawy automatyki, Uchyb regulacji
Cwiczenie 2 - Regulatory dwustawne moje, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Autom
Podstawy Automatyki Lab 10 CW6 ?danie regulatora PID
więcej podobnych podstron