|
Akademia Górniczo- Hutnicza im. Stanisława Staszica w Krakowie |
Imię i nazwisko: Dariusz Krakowski |
|
Temat ćwiczenia: Komputer w układzie automatycznej regulacji (2) |
Data zaliczenia: |
||
Wydział: EAIiE |
Kierunek: Elektrotechnika |
Data wykonania ćwiczenia: |
|
Laboratorium: Teorii sterowania i techniki regulacji |
|||
1. Konstruujemy układ pomiarowy(element inercji drugiego rzędu).
Transmitancja obiektu
Układ pomiarowy
nastawy obiektu:
T1=0.05;
T2=0.25;
Tp=0.05;
Tsym=4;
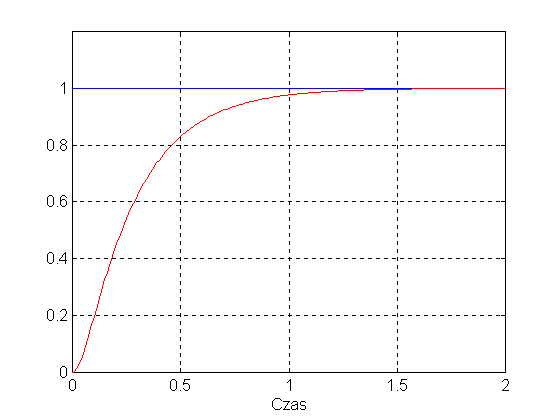
Odpowiedź układu na skok jednostkowy
2. Zamieniamy wartości sygnału ciągłego na wartości dyskretne przy pomocy funkcji -rk45( )
Funkcja ta zwraca trzy macierze:
[ t ]-macierz czasu;
[ x ]-macierz zmiennych stanu;
[ y ]-macierz wyjść- outporty 1,2,3;
3. Na podstawie równania różnicowego tworzymy m-skrypt wyliczający współczynniki równania różnicowego
m-skrypt
clear;
load dat_pom
nn = length(tt);
X = [yy(1:nn-2,2),yy(2:nn-1,2),yy(1:nn-2,1)];
Y = [yy(3:nn,2)];
a = inv(X'*X)*X'*Y
współczynniki równania różnicowego
a = -0.7866
1.7795
0.0071
4. Budujemy układ modelowy
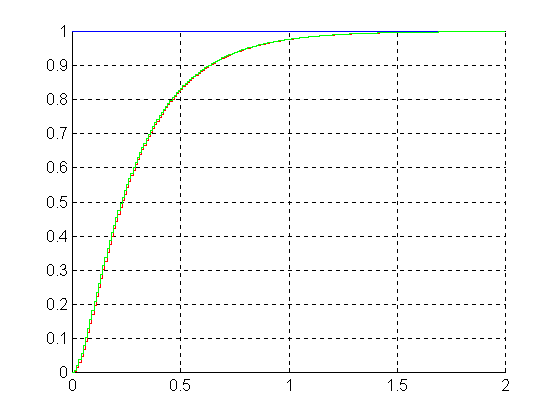
5. Porównujemy charakterystyki wyjściowe obydwu układów
Porównanie wypada bardzo pozytywnie z niewielkimi różnicami zatem można uznać, że prawidłowo zamodelowaliśmy układ.
6. W dalszej fazie modelujemy układ regulacji z regulatorem PID
Na wyjściu układu dołączyliśmy optymalizator przy pomocy, którego możemy dobierać nastawy regulatora w zależności od przebiegu jaki chcielibyśmy uzyskać na wyjściu. Ta metoda doboru nastaw regulatora jest metodą wizualną nie wymagającą dodatkowych obliczeń. Wszystkie czynności wykonuje za nas komputer przy pomocy odpowiedniego programu- Matlab.
Wyszukiwarka
Podobne podstrony:
Komputer w układzie automatycznej regulacji (1)
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
Labolatorium komputerowych systemów automatyki, Regulatory mikroprocesorowe, Politechnika Lubelska
Komputer w układzie regulacji część I Cw5
Automatyczna regulacja zasięgu reflektorów przegląd podzespołów
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
Komputerowe systemy automatyki przemysłowej
ksa4, Edukacja, studia, Semestr VIII, Komputerowe Systemy Automatyki, KSA-lab
209 Komputerowa analiza automatów skończonych
raczynski 2, Edukacja, studia, Semestr VII, Komputerowe Systemy Automatyki
sterna,logika układów cyfrowych L, Komputerowa synteza automatu z parametrem wewnętrznym
Laboratorium automatyki Regulacja impulsowa
Labolatorium komputerowych systemów automatyki, Systemy wizualizacji i sterowania, Politechnika Lube
Labolatorium komputerowych systemów automatyki, Systemy wizualizacji i sterowania, Politechnika Lube
Podstawy automatyki (w 3) regula id 366722
16 Podstawy automatyki regulatory optymalne
Podstawy automatyki i regulacji cd
10 Automatyka i regulacja automatyczna test
więcej podobnych podstron