16
Elektor
7-8/99
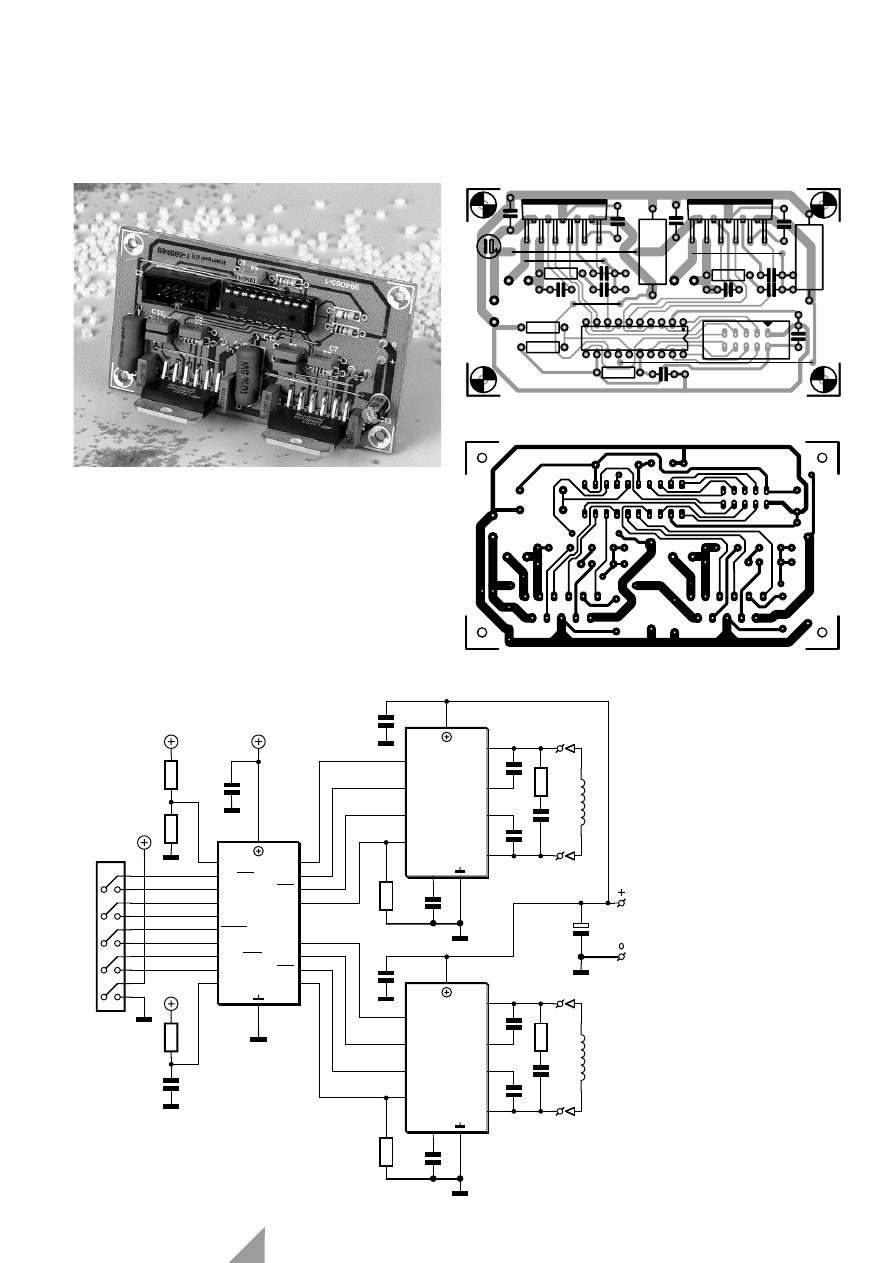
Die Ansteuerung von Schrittmotoren scheint für viele Elektor-
Leser (immer noch) ein Buch mit sieben Siegeln zu sein. Darum
stellen wir in diesem Halbleiterheft eine kompakte Schaltung vor,
die einen bipolaren Schrittmotor steuern kann. Für die Lei-
stungsstufen wurden zwei neue ICs mit der Bezeichnung ICL6203,
als Logikbaustein der alte Bekannte L297 eingesetzt. Dieses IC
sorgt dafür, daß sich der Motor bei jedem Eingangsimpuls an
STEP (Pin 18) ein Stückchen weiter dreht. Der Pegel an
CW/CCW (Pin 17) bestimmt die Drehrichtung. An Pin 19 läßt sich
Voll- oder Halbschrittbetrieb einstellen. Die anderen Anschlüsse
sind weniger wichtig und werden meist nicht eingesetzt. RESET
(Pin 20), CONTROL (Pin 11)
und ENABLE (Pin 10) liegen
während des normalen Betriebs
an +5 V. SYNC (Pin 1) ist ein
Ausgang, um mehrere L279er
zu verbinden, und bleibt offen,
ebenso wie HOME (Pin 3), der
aktiv wird, wenn die Ausgänge
ABCD das binäre Muster 0101
annehmen. Wer näheres über
die Einsatzmöglichkeiten des
ICs wissen will, findet die Infor-
mationen im Internet unter
us.st.com.
Die neuen Treiber L6203 ver-
binden klassische CMOS-Logik
mit D-MOS-Leistungstransisto-
ren und benötigen nur ein Mini-
mum an externen Bauteilen. D-
MOS-Transistoren verursachen
gegenüber den “alten” bipola-
ren Typen (L298) weniger
Spannungsverlust und produ-
zieren somit weniger Wärme.
Da der Strom durch die Motor-
wicklungen nicht nur an- und
ausgeschaltet, sondern auch
umgekehrt werden muß, umfas-
sen die ICs vollständige, aus je
vier D-MOS-Transistoren beste-
hende Brücken. Um die “obe-
ren” zwei Transistoren ansteu-
ern zu können, bedarf es einer
HALF/FULL
CONTROL
CW/CCW
ENABLE
SENS1
SENS2
RESET
L297
IC1
VREF
INH1
INH2
SYNC
HOME
STEP
OSC
17
18
19
20
10
15
14
13
12
16
11
4
A
6
B
7
C
9
D
5
8
1
3
2
ENABLE
BOOT1
SENSE
L6203
BOOT2
IC2
OUT1
OUT2
VREF
IN1
IN2
11
10
3
4
7
1
2
6
5
8
9
ENABLE
BOOT1
SENSE
L6203
BOOT2
IC3
OUT1
OUT2
VREF
IN1
IN2
11
10
3
4
7
1
2
6
5
8
9
K1
10
1
2
3
4
5
6
7
8
9
R2
3k9
R3
1k
R1
22k
C1
3n3
R7
0
Ω
5
C3
220n
R6
0
Ω
5
C4
220n
C10
100n
C9
100n
C5
15n
C6
15n
C7
15n
C8
15n
C11
22n
R4
10
Ω
C12
22n
R5
10
Ω
C2
100n
L1
L2
C13
10
µ
63V
5V
5V
5V
5V
994065 - 11
(C) Segment
994065-1
C1
C2
C3
C4
C5
C6
C7
C8
C9
C10
C11
C12
C13
H1
H2
H3
H4
IC1
IC2
IC3
K1
R1
R2
R3
R4
R5
R6
R7
0
+
L2
L1
994065-1
(C) Segment
994065-1
001
Schrittmotorsteuerung
17
Elektor
7-8/99
Steuerspannung, die höher als die Betriebsspannung liegt. Aus die-
sem Grund sind Bootstrap-Schaltungen integriert, von denen
lediglich die Kondensatoren C5...C8 sichtbar sind. R4/C11 und
R5/C12 dämpfen Spannungsspitzen über den Motorwicklungen.
Außerdem sind lediglich ein paar Entkoppelkondensatoren not-
wendig.
Der L6203 kann mit Strömen bis 4 A und Spannungen bis 42 V
arbeiten. Sicherheitshalber sollte man ein kleines Stückchen unter
42 V bleiben. Um eine Strombegrenzung muß man sich nicht küm-
mern. Wenn der Strom zu hoch wird, stellt das IC dies über R6
und R7 fest und schaltet ab. Diese Widerstände werden dem
Motorstrom angepaßt:
R6, R7 = 1 V / I
MOTOR
Obwohl der L6203 über eine thermische Sicherung verfügt, sollte
man ihn bei höherer Verlustleistung mit einem Kühlkörper aus-
statten, da sonst der Motor schnell abgeschaltet wird.
Beachten Sie, daß das Logik-IC L297 eine Versorgungsspannung
von +5 V (50 mA über K1) benötigt. Die Spannung an den
Anschlüssen 0 und + ist für den Schrittmotor bestimmt und sollte
gleich oder besser ein klein wenig höher sein als die Soll-Motor-
spannung.
(994065)rg
Stückliste
Widerstände:
R1 = 22 k
R2 = 3k9
R3 = 1 k
R4,R5 = 10
Ω
R6,R7 = 0
Ω5/3 W *
Kondensatoren:
C1 = 3n3
C2,C9,C10 = 100 n
C3,C4 = 220 n
C5...C8 = 15 n
C11,C12 = 22 n
C13 = 10
µ/63 V stehend
Halbleiter:
IC1 = L297 (ST
Micorelectronics)
IC2,IC3 = L6203 (ST
Microelectronics)
Außerdem:
K1 = 2
⋅5poliger
Pfostenverbinder mit
Schutzkragen
PC1...PC6 = Lötnägel
L1,L2 = bipolarer
Schrittmotor
Entwurf von Karlheinz Lorenz
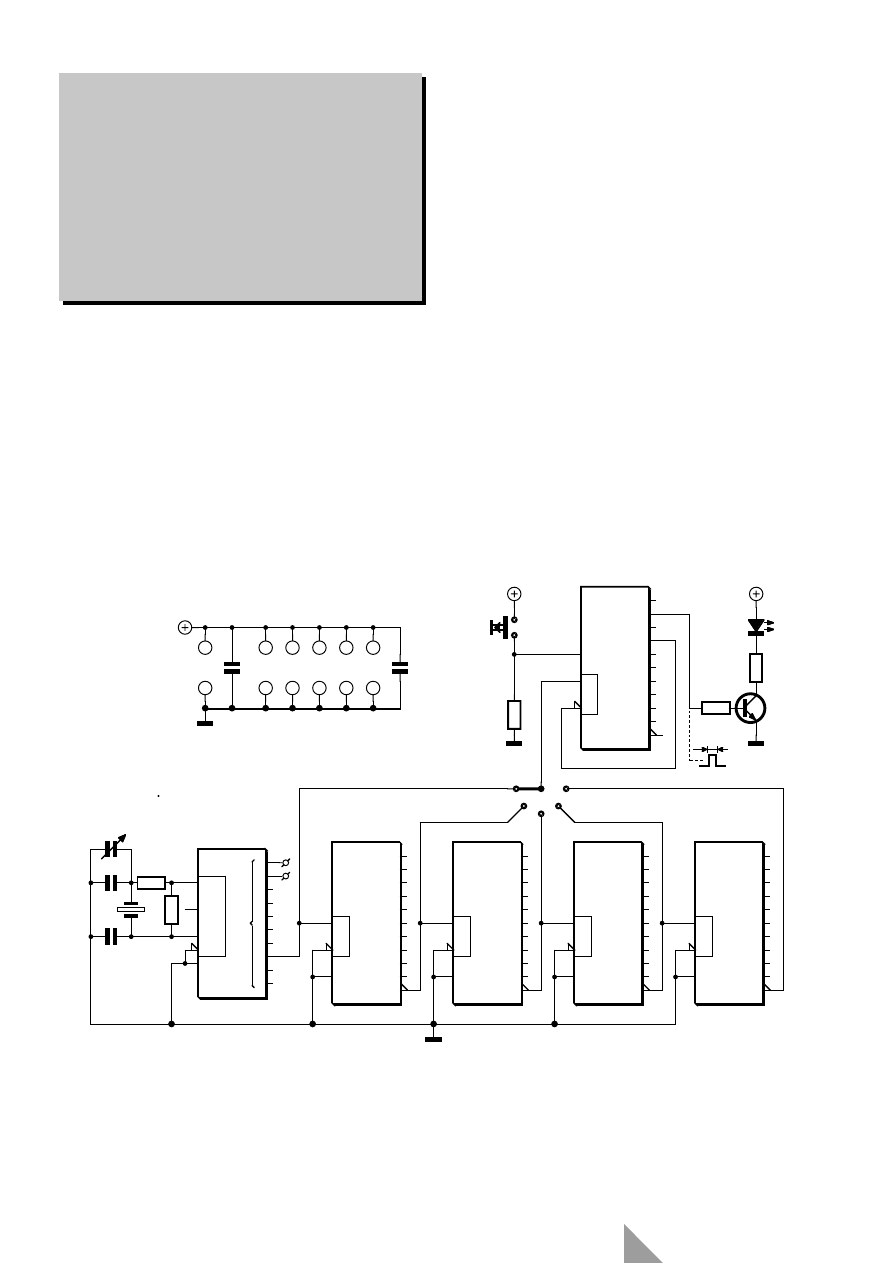
Die Schaltung hat die Aufgabe, auf Knopfdruck Impulse defi-
nierter Länge zu erzeugen. Sie eignet sich hervorragend als
Zeitfenster-Geber für Frequenzzähler, besteht ausschließlich
aus preiswerten Standard-Bauteilen und kann in kurzer Zeit
aufgebaut werden.
Das Schaltbild zeigt mit IC1, einem 4060, einen 14stufigen Binär-
zähler mit integriertem Oszillator. Als Taktgeber arbeitet ein preis-
werter 4,096-MHz-Quarz, so daß nach der Teilung durch 2
14
ein
1-kHz-Signal am Ausgang (Pin 1) erscheint. Auf den Oszillator
folgt eine Reihe über die Carry-out-Ausgänge (Pin 12) kaskadierte
4017-Dezimalzähler (IC2...5), die die Referenzfrequenzen 100 Hz,
10 Hz, 1 Hz und 0,1 Hz zur Verfügung stellen.
Mit dem nicht-brückenden Drehschalter S1 kann man eine dieser
Frequenzen auswählen und dem Takteingang eines weiteren 4017-
Zählers zuführen. Im Gegensatz zu den anderen ICs dieses Typs
R1
2M
R2
2k2
X1
4.096MHz
C2
39p
C3
56p
C1
50p
S1
CTRDIV10/
IC2
CT=0
CT
≥
5
4017
DEC
14
13
15
12
11
10
4
9
6
5
1
7
3
2
&
+
0
1
2
3
4
5
6
7
8
9
CTRDIV10/
IC3
CT=0
CT
≥
5
4017
DEC
14
13
15
12
11
10
4
9
6
5
1
7
3
2
&
+
0
1
2
3
4
5
6
7
8
9
CTRDIV10/
IC4
CT=0
CT
≥
5
4017
DEC
14
13
15
12
11
10
4
9
6
5
1
7
3
2
&
+
0
1
2
3
4
5
6
7
8
9
CTRDIV10/
IC5
CT=0
CT
≥
5
4017
DEC
14
13
15
12
11
10
4
9
6
5
1
7
3
2
&
+
0
1
2
3
4
5
6
7
8
9
S2
R3
3k9
CTRDIV10/
IC6
CT=0
CT
≥
5
4017
DEC
14
13
15
12
11
10
4
9
6
5
1
7
3
2
&
+
0
1
2
3
4
5
6
7
8
9
R4
470k
R5
1k
D1
T1
BC547C
IC1
16
8
IC2
16
8
IC3
16
8
IC4
16
8
IC5
16
8
IC6
16
8
C4
100n
C5
100n
CTR14
IC1
4060
CT=0
RCX
10
11
12
15
13
14
11
13
12
CT
CX
RX !G
1
6
4
5
7
9
3
4
5
6
7
8
9
3
2
+
1kHz
100Hz
10Hz
1Hz
0Hz1
994002 - 11
10s; 1s; 100ms; 10ms; 1ms
15V
15V
15V
*
zie tekst
*
see text
*
siehe Text
*
voir texte
*
002
Meßwertgeber
Wyszukiwarka
Podobne podstrony:
CODESYS Installation und Erste Schritte
Hueber Schritte 1 Lernwortschatz
Bipolare Schrittmotorsteuerung
Inhalt Schritte im Beruf
506 Ein Schritt voran
I2C Schrittmotorsteuerung
C166 Schrittmotor Steuerung (2)
5 Schritt
Hueber Schritte International 3 Glossar DE EN A2 1
Schrittmotoren
Hardcopy, Erste Schritte
więcej podobnych podstron