Genau wie andere
bestehen auch Schritt-
motoren aus einem
feststehenden Stator
und einem rotieren-
den Rotor. Während beim Gleich-
strommotor der Rotor (und manchmal
auch der Stator) mit Elektromagneten
versehen ist, besitzt ein Schrittmotor
ausschließlich stationäre Elektroma-
gneten. Der aus unmagnetischem
Weicheisen oder aus einem Perma-
nentmagneten bestehende Rotor
rotiert aufgrund der Wirkung der
unterschiedlich ausgerichteten Felder
der Stator-Elektromagneten. Bevor wir
wissen, wie ein Schrittmotor funktio-
niert, haben wir also schon einen wich-
tigen Vorteil erkannt: Es gibt keine
Stromzufuhr zum Rotor, so daß ver-
schleißträchtige Bürsten und Schleif-
ringe entfallen!
Die ersten, recht preiswerten Reluk-
tanz-Schrittmotoren
besaßen einen Rotor
aus einem gezahnten
We i c h e i s e n k e r n .
Abgesehen vom
geringen Drehmoment, das diese
Motoren entwickelten, besaßen Reluk-
tanz-Motoren keine “Raststellungen”,
da der Weicheisenkern von sich aus
keine magnetischen Pole bildete. Aus
diesem Grund führte man Perma-
ment-Schrittmotoren ein. Zwar
machte der dauermagnetische Rotor
Raststellungen möglich, allerdings nur
in größeren Schrittwinkeln. Der
Grund: Auf dem zylindrischen Rotor
mit radialer Magnetisierung kann nur
eine begrenzte Zahl von magneti-
schen Polen angeordnet werden. Den-
noch soll uns diese Schrittmotorart als
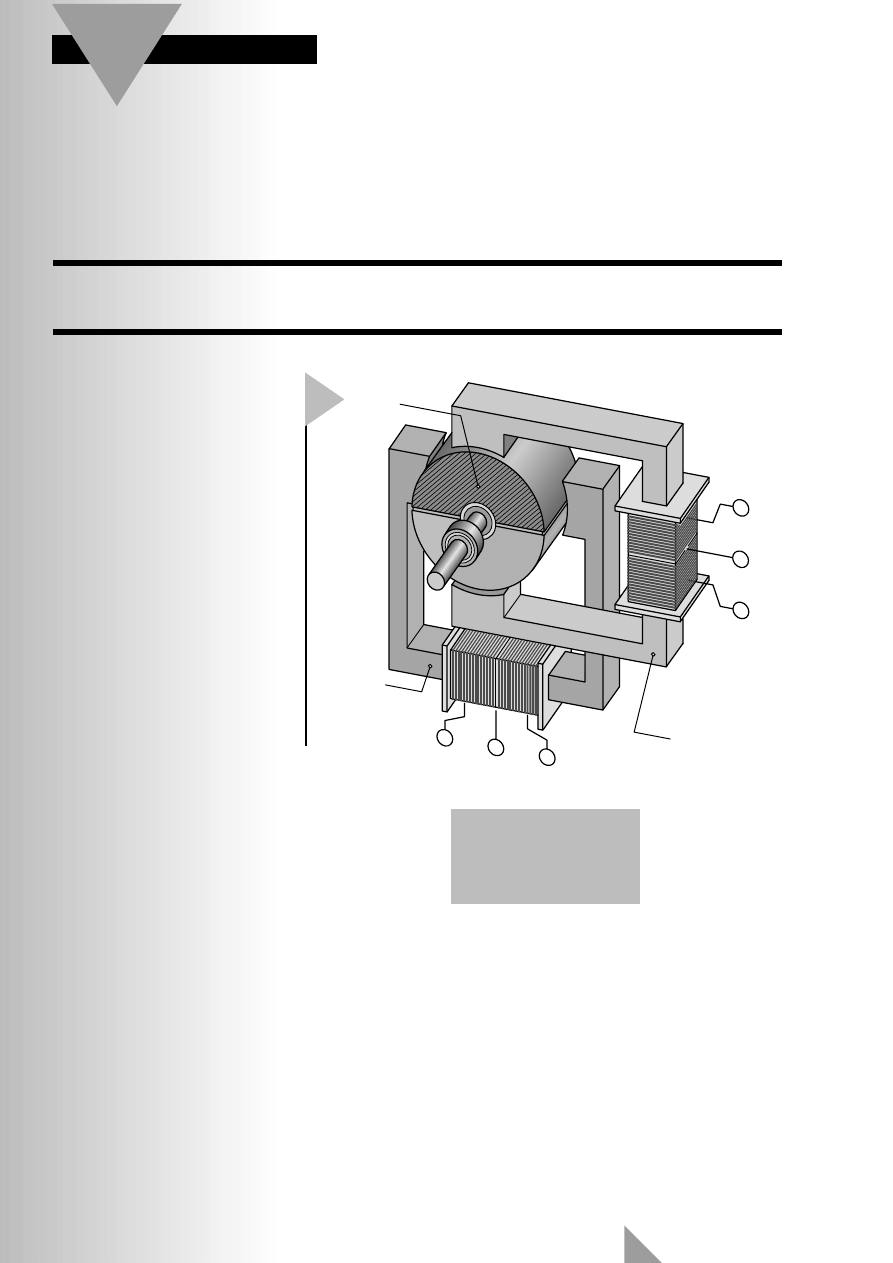
Einstieg in die Materie dienen. Bild 1
zeigt einen Schrittmotor in seiner ein-
fachsten Ausführung. Der Kern ist nur
Schrittmotoren sind
seit Anfang der 60er
Jahre bekannt, erfah-
ren aber in den letzten
Jahren eine stark
wachsende Bedeu-
tung. Sie werden als
Antriebe in Uhren und
anderen Zeigerinstru-
menten, in Druckern
und Plottern, in Werk-
zeugmaschinen und
Robotern eingesetzt.
Schrittmotoren
Aufbau, Funktion und Steuerung
Strang 4
Strang 3
Strang 1
Strang 2
Stator
Stator
Rotor
990044 - 1 - 11
1
Bild 1. Das Modell eines
einfachen Schrittmotors
mit einem zweipoligen
Rotor und zwei um 90°
versetzten Wicklungen.
INFO & GRUNDLAGEN
61
Elektor
9/99
einfach magnetisiert (zwei Pole), es
gibt zwei um 90° versetzte Wicklun-
gen (Phasen). Fließt ein Strom durch
eine der Phasen, entsteht ein Magnet-
feld. Der Rotor bewegt sich mit sei-
nem Magnetpolpaar in eine Position,
an der zwischen Rotor und Phase der
Luftspalt am kleinsten und der
magnetische Fluß am größten ist
(ungleiche Pole ziehen sich an, gleiche
stoßen sich ab!).
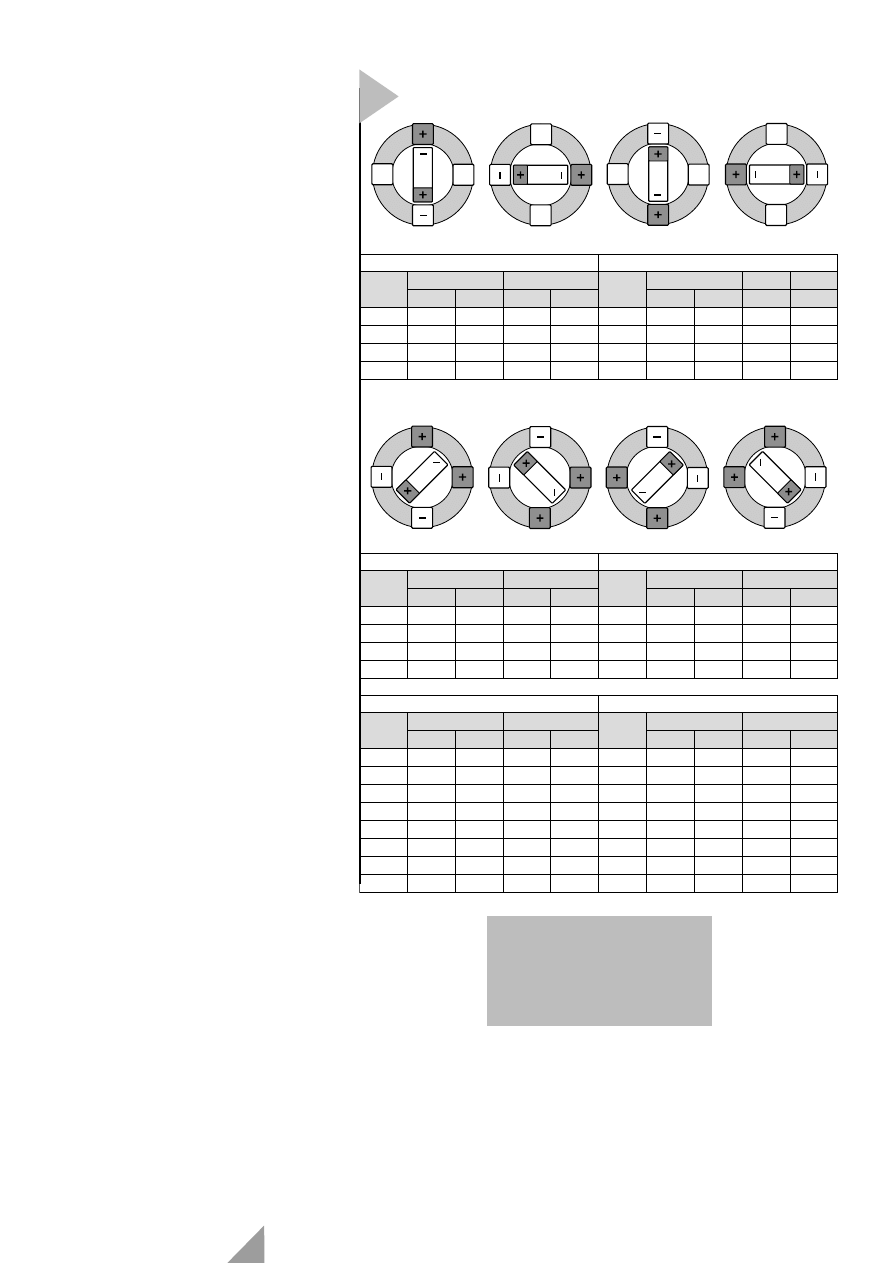
Durch Ändern der Stromrichtung
kann der Rotor vier verschiedene Posi-
tionen einnehmen, wobei die Drehbe-
wegung des Rotors der Reihenfolge
der Polaritätsänderung entspricht.
Dieser sogenannte Wavedrive-Betrieb
ist in Bild 2a schematisch dargestellt.
Eine andere Methode, den Schrittmo-
tor in Drehung zu bringen, ist das
Bestromen beider Phasen beim Nor-
mal-Betrieb. Dabei sind immer zwei-
mal zwei gleiche Phasen nebeneinan-
der zu finden. Das Verhalten des Rotors
ist leicht anhand Bild 2b erklärbar.
Eine Sequenz ist eine “elektrische”
Umdrehung von 360° (elektrischer
Schrittwinkel), die notwendig ist, um
einen kompletten mechanischen
Schrittwinkel auszuführen. Bei beiden
oben erläuterten Vollschritt-Betriebs-
arten besteht eine Sequenz aus jeweils
vier Takten. Im Beispiel entspricht ein
mechanischer Schrittwinkel einer kom-
pletten Motordrehung von 360°.
Es spricht allerdings nichts dagegen,
den Wavedrive- und den Normal-
Betrieb zur sogenannten Halbschritt-
Steuerung zu kombinieren. Damit las-
sen sich quasi Zwischenschritte einle-
gen, die die Auflösung der Motoren
zum “Nulltarif” verdoppeln. In dieser
Betriebsart werden abwechselnd eine
und zwei Spulen bestromt. Im Halb-
schritt-Betrieb besteht eine Sequenz
also aus acht Takten.
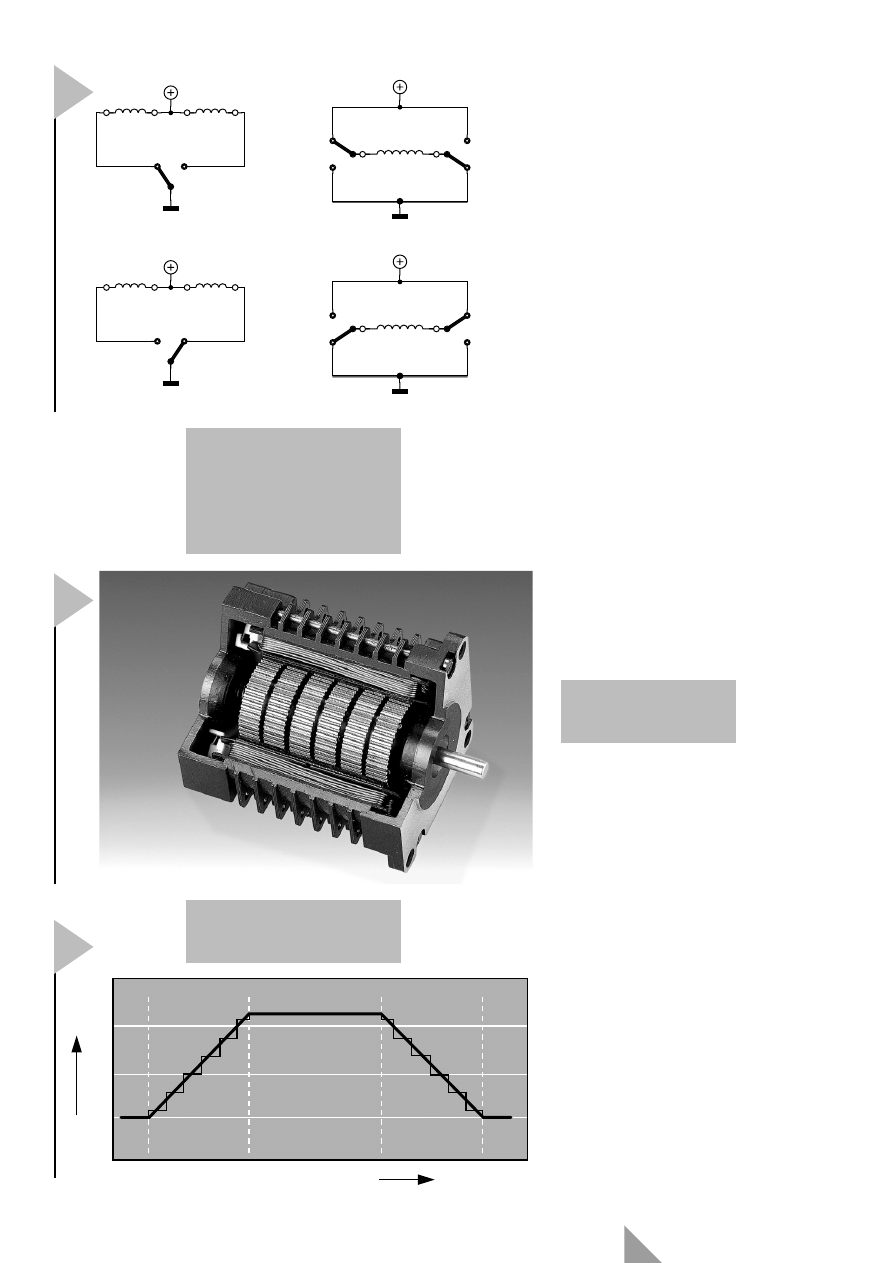
Je nach Ausführung der Spulen unter-
scheidet man zwei weitere Ansteuer-
techniken. Mit einem geringen Schal-
tungsaufwand (nur ein Schalter)
kommt der früher sehr beliebte Uni-
polar-Betrieb (Bild 3a) aus. Allerdings
müssen die Spulen Mittelabgriffe
besitzen, außerdem kann wegen der
geringen Spulenströme nur ein kleines
Drehmoment und eine geringe Dreh-
zahl erzielt werden. Erst mit Aufkom-
men integrierter und preiswerter
Schrittmotor-Ansteuerbausteine
begann sich die Bipolar-Technik (Bild
3b) mehr und mehr durchzusetzen.
Dabei werden die Spulen beidseitig
umgepolt. Die Ansteuerung muß also
über zwei statt über einen Schalter
stattfinden.
Schrittmotoren mit einer geringen
Anzahl von Phasen würden auch im
Halbschrittbetrieb besonders bei nied-
rigen Frequenzen ruckeln. Eine weitere
Verbesserung ist jedoch möglich,
indem man den Strom nicht einfach
ein- und ausschaltet, sondern stufen-
62
Elektor
9/99
weise erhöht und
senkt. Durch die-
sen Mikroschritt-
betrieb entstehen
ruhige Drehbewe-
gungen. Allerdings
reduziert der
Mikroschrittbetrieb das Drehmoment
und die Positionier-Genauigkeit, was
vor allem bei Schrittmotoren mit weni-
gen Rotorpositionen negativ zum Tra-
gen kommt.
I
N D E R
P
R A X I S
Bisher haben wir ein Schrittmotormo-
dell besprochen, daß in der Praxis so
nicht existieren
dürfte. Moderne
Hybrid-Schrittmo-
toren verwenden
axial dauermagne-
tisierte Scheiben
als Kerne. Diese
Scheiben sind mit Zahnkränzen verse-
hen, die um eine halbe Zahnbreite
gegeneinander versetzt sind, so daß
sich Nord- und Südpole abwechseln.
Das Foto (Bild 4) zeigt das Innere eines
solchen Hybrid-Schrittmotors. Die
Zahnung des Rotors ist deutlich zu
erkennen.
Der Schrittwinkel, die Auflösung des
Motors, hängt nicht nur von der
0
x
1
x
0
2
1
x
3
x
1
4
990044 - 1 - 12a
Rechtsdrehung
Linksdrehung
Phase 1
Phase 2
Takt
Phase 1
Polarität
Strom
Polarität
Strom
Polarität
Strom
Polarität
Strom
1
0
1
x
0
1
0
1
x
0
2
x
0
0
1
2
x
0
1
1
3
1
1
x
0
3
1
1
x
0
4
x
0
1
1
4
x
0
0
1
Takt
0
0
1
1
0
2
1
1
3
0
1
4
990044 - 1 - 12b
Rechtsdrehung
Linksdrehung
Takt
Phase 1
Phase 2
Takt
Phase 1
Phase 2
Polarität
Strom
Polarität
Strom
Polarität
Strom
Polarität
Strom
1
0
1
0
1
1
0
1
0
1
2
1
1
0
1
2
0
1
1
1
3
1
1
1
1
3
1
1
1
1
4
0
1
1
1
4
1
1
0
1
Rechtsdrehung
Linksdrehung
Takt
Phase 1
Phase 2
Takt
Phase 1
Phase 2
Polarität
Strom
Polarität
Strom
Polarität
Strom
Polarität
Strom
1
0
1
X
0
1
0
1
X
0
2
0
1
0
1
2
0
1
1
1
3
X
0
0
1
3
X
0
1
1
4
1
1
0
1
4
1
1
1
1
5
1
1
X
0
5
1
1
X
0
6
1
1
1
1
6
1
1
0
1
7
X
0
1
1
7
X
0
0
1
8
0
1
1
1
8
0
1
0
1
2
a
b
Bild 2. Bestromung im Wave-
drive- (a) und im Normal-
Betrieb (b). Kombiniert man
diese beiden Vollschritt-
Betriebsarten, erhält man
eine Halbschritt-Ansteuerung.
Anzahl der Polpaare, also der Nord-
und Südpolzähne des Rotors, sondern
auch von der Anzahl der einzeln steu-
erbaren Phasen ab. Allerdings
beschränkt man sich in der Praxis auf
zwei- bis fünfpolige Motoren, um den
Verdrahtungs- und Schaltungsauf-
wand gering zu halten. Legt man
Wert auf ein großes Drehmoment,
sollte man zweipoligen Schrittmoto-
ren den Vorzug geben, während für
ein “ruckelarmes” Laufverhalten nur
ein fünfpoliger Motor (im Mikro-
schrittbetrieb) in Frage kommt. Ein
dreipoliger Motor stellt einen guten
Kompromiß dar.
Üblich sind Schrittmotoren mit Unter-
teilungen einer Umdrehung von
wenigstens 24 Schritten (15°) oder 48
Schritten (7,5°). Ältere Festplattenlauf-
werke sind zur genauen Kopfpositio-
nierung meist mit Schrittmotoren mit
200 (1,8°) oder gar 400 Schritten (0,9°)
ausgestattet.
Beim Einschalten einer Taktfrequenz
von mehreren Kilohertz dreht sich der
Motor überhaupt nicht, da der Rotor
viel zu träge ist, um dem schnell rotie-
renden Stator-Magnetfeld zu folgen.
Mit einer Start/Stoppfrequenz, die je
nach Bauart des Motors zwischen 50
Hz und 2000 Hz liegt, ist ein sicherer
Anlauf gewährleistet. Nach dem Start
kann man die Taktfrequenz erhöhen.
Die Beschleunigung darf beliebig lang-
sam, jedoch nicht beliebig schnell erfol-
gen. Dann bleibt der Schrittmotor
nämlich genauso stehen wie beim Ver-
such, die maximal zulässige Taktfre-
quenz zu überschreiten.
Der Verlauf von der Start/Stoppfre-
quenz über die Beschleunigungsphase
bis zur Sollgeschwindigkeit sieht wie
eine ansteigende Rampe aus und wird
auch so genannt (Bild 5). Das Aus-
schalten erfolgt ebenfalls mit einer
(abfallenden) Rampe, da beim soforti-
gen Abschalten der Rotor wegen seiner
Masse einfach weiterlaufen würde.
Informationen über die genaue Posi-
tion gingen verloren. Lediglich zur
Nullpunktsuche und für langsame
Fahrten wählt man eine Taktfrequenz,
bei der sich der Schrittmotor ohne
Rampen sicher in beide Richtungen
dreht. Um den Schrittmotor vor allem
im Halbschritt- oder Mikroschrittbe-
trieb zu drehen und zusätzlich
Beschleunigungsrampen zu erzeugen,
bedarf es der Steuerung durch einen
Computer. Dies ist die Aufgabe der
Schrittmotor-Steuerung für das
80C166-Board, die im nächsten Heft
beschrieben wird.
(990044)rg
63
Elektor
9/99
+U
S
GND
+U
S
GND
990044 - 1 - 13a
+U
S
GND
GND
+U
S
+U
S
GND
GND
+U
S
990044 - 1 - 13b
3
a
b
Rampe
Rampe
Zeit
Frequenz
4000
3000
2000
1000
0
Hochgeschwindigkeits-
Phase
990044 - 1 - 14
5
Bild 5. Beschleunigen und
Bremsen durch eine Ram-
penfunktion.
Bild 4. Hier ist die Zah-
nung des Rotors deut-
lich zu erkennen.
Bild 3. Die Motorwicklungen
müssen im unipolaren
Betrieb (a) eine Mittelan-
zapfung besitzen. Bipolare
Motoren (b) erfordern eine
Ansteuerung über je zwei
Schalter pro Wicklung.
4
Wyszukiwarka
Podobne podstrony:
CODESYS Installation und Erste Schritte
Hueber Schritte 1 Lernwortschatz
Bipolare Schrittmotorsteuerung
Inhalt Schritte im Beruf
506 Ein Schritt voran
I2C Schrittmotorsteuerung
Schrittmotorsteuerung
C166 Schrittmotor Steuerung (2)
5 Schritt
Hueber Schritte International 3 Glossar DE EN A2 1
Hardcopy, Erste Schritte
więcej podobnych podstron