HALBLEITERHEFT2000
53
7-8/2000
Elektor
Von R.T.J.M. van der Heijden
Das Thema Schrittmotoren scheint recht populär zu sein. Auf
jede Veröffentlichung in Elektor folgt eine Vielzahl von Leser-
Reaktionen, so auch auf die I
2
C-Steuerung für unipolare
Schrittmotoren in der Maiausgabe 1999. Die gewünschte Vari-
ante für bipolare Schrittmotoren wollen wir nun vorstellen. Ein
bipolarer Motor besitzt zwei Wicklungen und damit vier
Anschlüsse. Durch jede Wicklung kann ein positiver (+), ein
negativer (-) oder gar kein Strom fließen, wie dies in Tabelle 1
eingetragen ist.
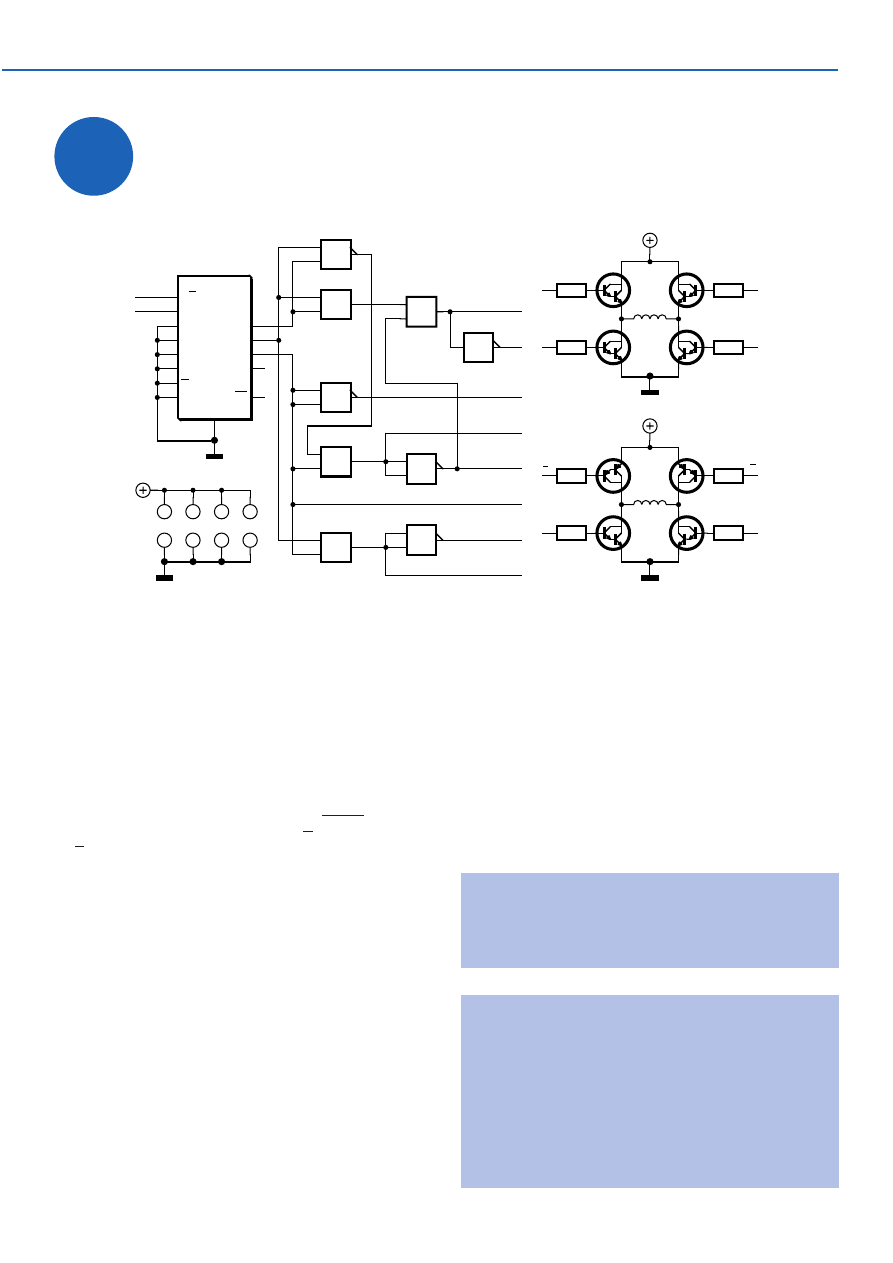
Ein Zähler (IC1) zählt die an seinem Takteingang eintreffen-
den positiven Flanken und setzt sie in binärer Form auf die
drei Ausgänge Q0...Q2. Der Status des UP/DOWN-Anschlus-
ses bestimmt, ob der 4516 aufwärts (U/D = 1) oder abwärts
(U/D = 0) zählt. Die binären Ausgänge werden durch die fol-
genden Gatter dekodiert, so dass alle für den bipolaren Schritt-
motor notwendigen Zustände entstehen (Tabelle 2).
Da sich die Stromrichtung durch eine Wicklung umkehrt, ist
jede Wicklung in eine Brückenschaltung von jeweils vier Tran-
sistoren aufgenommen. Ein Strom kann nur fließen, wenn ein
diagonal gegenüberliegendes Transistorpaar leitet, also ent-
weder T1 und T4 oder T2 und T3. Die übrigen Transistoren
müssen gleichzeitig sperren, da ansonsten ein Kurzschluss
entsteht.
Die acht Gatterausgänge 1a...d und 2a...d steuern die beiden
“normalen” Brückenschaltungen mit jeweils NPN-Transisto-
ren BC517 an. Der Spannungsabfall an den (vor allem oberen)
Darlington-Transistoren ist allerdings so groß, dass bei niedri-
ger Betriebsspannung (zum Beispiel +5 V) für die Wicklungen
herzlich wenig übrig bleibt. In einem solchen Fall ersetzt man
die oberen NPN- durch äquivalente PNP-Transistoren des Typs
BC516. Natürlich muss dann auch die Steuerspannung für die
PNP-Typen umgekehrt werden. Kein Problem: Die Steuer-
spannungen 1a, 1b, 2a und 2b liegen auch als 1d, 1c, 2d und
2c in invertierter Form vor. Das Signal 1a ist dann überflüssig,
so dass man Inverter IC4a (samt den übrigen fünf Invertern
im IC) weglassen kann.
Viele Schrittmotoren sind für eine Betriebsspannung von 12 V
ausgelegt. Die Logik-ICs der 4xxx-Serie vertragen glückli-
cherweise Spannungen bis 15...18 V. Bei einer solch hohen Ver-
sorgungsspannungen fallen übrigens die Verluste der Brücke
wenig ins Gewicht. Die Basiswiderstände können dann auf 22
k
Ω erhöht werden. Betreiben Sie - wenn möglich - Logik und
Motor aus der gleichen Spannungsquelle. Ohne Ansteuerung
leiten nämlich alle Transistoren der Brücke, so dass ein Kurz-
schluss unvermeidlich ist.
(004086)rg
Bipolare Schrittmotorsteuerung
046
Ansteuerung der Wicklungen
Phase 2
1
2
3
4
5
6
7
8
Spule 1
+
+
–
–
–
+
Spule 2
+
+
+
–
–
–
Dekodierung des Zählers
Phase
1
2
3
4
5
6
7
8
1a
+
+
+
+
1b
+
+
+
+
1c
+
+
+
+
1d
+
+
+
+
2a
+
+
+
+
2b
+
+
+
+
2c
+
+
+
+
2d
+
+
+
+
10
15
4
3
5
1
7
2
14
11
6
IC1
12
13
U/D
CLK
A1
A2
A3
A4
CI
PE
9
RST
Q0
Q1
Q2
Q3
CO
4516
1
2
3
IC2a
≥1
6
5
4
IC2b
≥1
8
9
10
IC2c
≥1
13
12
11
IC2d
≥1
1
2
3
IC3a
=1
6
5
4
IC3b
=1
8
9
10
IC3c
=1
3
2
1
IC4a
12
13
11
IC3d
=1
L1
<0A5
T1
T3
T2
T4
R1
4k7
R2
4k7
R3
4k7
R4
4k7
5V
L2
<0A5
T3
T4
R1
10k
R2
10k
R3
10k
R4
10k
5V
IC1
16
8
IC2
14
7
IC3
14
7
IC4
8
1
5V
IC2 = 4001
IC3 = 4030
IC2 = 4049
004086 - 11
BC517
2x
BC517
2x
2x
BC517
2x
T1
T2
BC516
L1
L1
1d
1a
2c
2d
2a
2b
1c
1b
a
d
b
c
a
d
b
c
Wyszukiwarka
Podobne podstrony:
F 1 Zasada działania tranzystora bipolarnego
90 Tranzystor bipolarny jako wzmacniacz
cw5 Tranzystor bipolarny
etr2 lab odpowiedzi na pytania do laborek z tranzystora bipolarnego, Mechatronika, 2 Rok
Układ zasilania tranzystorów bipolarnych
126 Budowa tranzystora bipolarnego
Wyklad 5 bipolar, studia wsiz, semestr 4, Elektrotechnika i Elektronika, Elektrotechnika i Elektroni
bipolarny, Studia, Elektrotechnika i elektronika, Elektronika
Tranzystor bipolarny-gac, Szkoła, Politechnika 1- 5 sem, SEM IV, Elektronika i Energoelektronika. La
Tranzystory Bipolarne, elektronika, stodia czyjeś
Badanie tranzystora bipolarnego
Omówić zakresy i konfiguracje pracy tranzystora bipolarnego bjt
bipolarne - rossi, Politechnika Śląska
Badanie wzmacniacza szerokopasmowego, Ćwiczenie nr 23: -Badanie tranzystora bipolarnego -
Tranzystor bipolarny?135 oraz unipolarny czasy
Sprawozdanie Tranzystor bipolarny Sprawozdanie Tranzystory bipolarne
bipolarny
więcej podobnych podstron