l2 = d12 + d22 - 2d1d2cos(β-α)
1.Tyczenie lokalizujace - met. biegunowa, dokładność
Tyczenie lok budowli polega na wyznaczaniu w terenie miejsc usytuowania nowo wznoszonych obiektow, zgodnie z projektem zagosp terenu. Przedmiotem jest określenie położenia elementow projektowanego obiektu względem osnowy realizacyjnej oraz oznaczenie ich w terenie w taki sposób aby wytyczane punty mogly być wykorzystywane po wykonaniu robot bud-mont. Metoda biegunowa - polega na odlozeniu odległości d wzdłuż kierunku wyznaczanego przez odlozenie kata alfa od prostych odniesienia. Stabilizujemy w terenie 2 punty A i B tworzące baze i odkładając od tej osnowy dany kat i odl otrzymujemy punkt do wyniesienia. Na dokl tyczenia ma wpływ - niedokl osnowy, niedokl wyznaczanego puntu osnowy, niedokl czynności pomiarowych - centrowanie, odlozenie kata i odległości.
Dokl tyczenia określa się na podst. dopuszczalnych odchyłek realizacji p-któw obiektów. Są to bł. tyczenia p-któw w terenie i bł. czynności budowlanych. Wartości średnich bł. tyczenia p-któw, długości lub kierunków pozwalają na określenie dokładności pomiaru sieci realizacyjnej. Tyczenie to czynności pomiarowe mające na celu wskazanie i utrwalenie w terenie lub na obiekcie zespołu p-któw o założonych z góry położeniach w stosunku do p-któw oznaczonych w terenie lub na obiekcie i przyjętych jako p-kty odniesienia.
Analiza dokładności: mp=√(mx2+my2), Korzystając ze wzorów na wsp. punktu P Xp=XA+cosαd, Yp=YA+sinαd i różniczkując je otrzymujemy wzory na błąd położenia punktu P: mx2=[(δXp/δα)mα]2+[(δXp/δd)md]2,
my2=[(δYp/δα)mα]2+[(δYp/δd)md]2,
mx2=(-sinαd mα)2+(cosα md)2,
my2=(cosαd mα)2+(sinα md)2,
mp2= mα2d2+md2
Błąd długości: dA-P=√ (XP-XA)2+(YP-YA)2
md2=(∂d/∂XP*mXP)2+(∂d/∂XA*mXA)2+(∂d/∂YP*mYP)2+(∂d/∂YA*mYA)2, gdzie:
∂d/∂XP=(XP-XA)/√[(XP-XA)2+(YP-YA)2 ]
∂d/∂XA=-(XP-XA)/√[(XP-XA)2+(YP-YA)2 ]
∂d/∂YP=(YP-YA)/√[(XP-XA)2+(YP- YA)2 ]
∂d/∂YA=-(YP-YA)/√[(XP-XA)2+(YP-YA)2 ]
Błąd kąta można wyzn. ze wzoru: mα/ρ=md/d
2.PROJEKTOWANIE PŁASZ-CZYZN BILANSUJĄCYCH ROBOTY ZIEMNE
Każda płaszczyzna przechodząca przez środek ciężkości jest płasz-czyzną bilansującą roboty ziemne.
1)średnia wartość współrzędnych
XS=Σ xi/n YS=Σ yi/n ZS=Σ zi/n
2)jeżeli pł. bilansująca ma zadany kierunek najw. spadku α i wart. najw. spadku k to r-nie płaszcz. to:
(kcosα)x + (ksinα)y - z + Ho = 0
Ho = - XSkcosα - YSksinα + ZS
3)jeżeli projektowana płaszcz. ma przechodzić przez 2 p-ty
1 (x1, y1, z1) i 2 (x2, y2, z2) to
(x1-XS)kcosα + (y1-YS)ksinα -
(z1-ZS) =0
(x2-XS)kcosα + (y2-YS)ksinα -
(z2-ZS) =0
kcosα i ksinα dają tgα i liczymy α
4)jeżeli projektowana płaszczyzna ma przechodzić przez 1 dany p-t i ma określony max spadek wzdłuż kierunku α to mamy jedno r-nie;
(x1-XS)kcosα + (y1-YS)ksinα -
(z1-ZS) =0
5)jeżeli projektowana płaszczyzna ma przechodzić przez 1 dany p-t i ma określony max spadek k to mamy jedno r-nie;
(x1-XS)kcosα + (y1-YS)ksinα -
(z1-ZS) =0
i dołączamy r-nie sin2α+cos2α=1 i wyliczamy α
3.Wskaźniki konstrukcyjne - metody, opisac
Przed wyznaczeniem ws kontr na poszczególnych poziomach roboczych należy sporządzić szkic tyczenia, który zawiera rozmieszczenie osi konstrukcyjnych zgodnie ze szkicem dok oraz osnowe budowli, Tora będzie służyć do przenoszenia osi kontr na poszczeg kondygnacje.
a)met. stałej prostej
1.ustawiamy teodolit na punkcie linii bazowej osnowy bud-mont i celujemy na tarcze na koncu tej linii
2.poziomujemy teodolit przy każdym pomiarze
3.ukladamy late na stropie kondygnacji roboczej i ustawiamy ja prostopadle do płaszczyzny celu tak, aby obraz tarczy sygn znalazł się na pionowej kresce celownika teodolitu
4.zaznaczamy na stropie tyczony punkt - czynności w 2 polozeniach lunety
1)jeśli OK-OP=OK'-ΔK=OP'-ΔP
2)ΔK = ΔP/dP * dK
OK'-(ΔP/ dP) dK= OP'-ΔP
OK'dP-ΔPdK= dP OP'-ΔPdP
Rys
dP(OK'- OP')= ΔP(dK-dP)
poprawki trasowania
ΔP = [(OK'-OP')/(dK-dP)] * dP
ΔK = [OK'-OP'] + ΔP
b)metoda rzutowania
Wyznacza się osie konstrukcyjne lub linie równoległe do tych osi dla ścian zewn. i wewn.
1.stawiamy na stanowisku teodolit, poziomujemy, celujemy pionowa kreska na wskaźnik wyjściowy na budowli
2.w 2 pol lunety wyznaczamy wsk na krawędzi stropu wg kreski pionu
3.za każdym razem poziomujemy teod
4.analogicznie wyznaczamy wsk z drugiej strony budynku
5.wytyczamy teod w linię przeniesionych wskaźników i za pomocą laty wyznaczamy wskaźnik ścian zewnętrznych
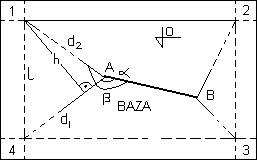
c)metoda biegunowa
l2 = d12 + d22 - 2d1d2cos(β-α)
mL2 = cos2αmd12 + cos2αmd22 + h2mβ2 + h2mα2
d).met przeciec kierunkow
e).met pionowania optycznego
Łuk koszowy - rys, wzory
Łuk koszowy to zespol krzywych (2 lub wiecej lukow kolowych) o roznych promieniach majacych 1,2 lub wiecej punktow wspolnych i wspolne styczne w tych punktach. Punkty główne to punkty styczności z prostymi głównymi i punkty wspolne poszczególnych lukow (PTK) Do wytyczenia luku w terenie konieczna jest znajomość elementow:R1,R2, styczne t1,t2, katy A,A1,A2. Majac te wielkości pozostale elementy luku koszowego wyznacza się jak w przypadku luku kolowego.
DANE: L1, R1, R2, γ, SZUKANE: L2, α1, α2, -> możemy zapisac: 1)α= α1+α2 ; 2)t2=t1cosβ+R1sinβ-(R1-R2)sin α2 ; 3)R2=t1sinβ-R1cosβ-(R1-R2)cosα2 ; z równania trzeciego możemy wyzn wartośc kąta: cosα2=(t1sinβ-R1cosβ-R2)/(R1-R2); Podst do równania 2 kat α2 wyznaczamy wartość stycznej t2, natomiast wartość kata α1 obliczamy z równania pierwszego. Pozostałe elementy liniowe wyznacza się jak w przypadku luku kołowego.