
Algorytmy i struktury danych
Lista, stos, kolejka

Struktury danych (1)
Struktura danych
– zbiór elementów. Każdy element składa
się z jednego lub więcej części (słów maszynowych),
zwanych
polami
.
p1
p2
p3
p4
Przykład
elementu
struktury danych
Pole p1 jest
wskaźnikiem
(dowiązaniem)
Pola p2, p3, p4 – dowolnego typu
Wskaźnik (dowiązanie)
– podstawowy sposób reprezentowania
złożonych struktur danych.
Dowiązanie puste
– symbol
, symbol uziemienia
Na pierwszą wartość wskazuje wartość zapisana w zmiennej
to
zmienna wskaźnikowa
– zmienna, której wartościami
są wskaźniki (dowiązania).
Wszystkie
odwołania
do elementów struktury odbywają się
• bezpośrednio przez zmienne (lub stałe) wskaźnikowe
• pośrednio przez pola elementów struktury zawierające wskaźniki
Struktury danych (2)
p2
p3
p4
p2
p3
p4
p2
p3
p4
p2
p3
p4
TOP
TOP
TOP

Listy liniowe
Projekt reprezentacji
struktury danych:
• zdefiniowanie
informacji
(danych), które będą przechowywane
• zdefiniowanie
operacji
wykonywanych na danych
Wybór struktury danych zależy od powyższych czynników
i determinuje funkcjonalność struktury.
Lista liniowa
–ciąg n
0 elementów X[1], X[2], .., X[n],
w którym względna pozycja elementu zdefiniowana jest w porządku
liniowym.
Dla n > 0 X[1] jest pierwszym elementem, X[n] ostatnim
i jeśli 1 < k < n, to k-ty element X[k] leży za elementem X[k-1]
i przed elementem X[k+1].

Listy
Podstawowe
operacje na liście
:
• dostęp do k-tego elementu listy. Cel: odczyt lub modyfikacja
zawartości pól elementu
• wstawianie nowego elementu przed lub po k-tym elemencie
• usuwanie k-tego elementu
• wyznaczenie liczby elementów listy
• znajdowanie elementu listy o zadanej wartości jednego z pól
Stos
(ang. LIFO)– lista liniowa, dla której operacje wstawiania i
usuwania (oraz odczytu) elementu dotyczą tylko jednego końca
listy
Kolejka
(ang. FIFO)– lista liniowa, dla której operacje wstawiania
dotyczą jednego końca, a operacje usuwania (i odczytu) drugiego
końca
Kolejka dwustronna
– lista liniowa, dla której wszystkie operacje
wstawiania i usuwania (i odczytu) dotyczą dowolnego końca listy
Wstawianie
lub
zdejmowanie
wierzchołek
dno
Stos
Usuwanie
Wstawianie
pierwszy
ostatni
Kolejka
Wstawianie
lub usuwanie
lewy
prawy
Kolejka dwustronna
Wstawianie
lub usuwanie

Realizacja listy liniowej – tablice (1)
Metoda najprostsza: umieszczenie elementów listy liniowej w
kolejnych komórkach (lokacjach) pamięci:
Add(X[i+1]) = Add(X[i]) + c
Add – funkcja zwracająca adres początku elementu listy
c – liczba słów na jeden element listy
Jeśli L
0
– adres bazowy „hipotetycznego” elementu X[0], to
Add(X[i]) = L
0
+ ci
Najczęściej za pomocą tablicy realizowany jest
stos
.
Zmienna
T
nazywana jest
wskaźnikiem stosu
.
Operacje na stosie:
T=0
– stos pusty
T
T + 1; X[T]
Y
– wkładanie elementu Y na stos
Y
X[T]; T
T – 1
– zdejmowanie elementu ze stosu,
gdy stos jest niepusty

Realizacja listy liniowej – tablice (2)
Realizacja kolejki lub kolejki dwustronnej.
Przechowywane są dwa wskaźniki: F (front) i R (rear).
Operacje na kolejce dwustronnej:
F=R=0
– kolejka pusta
R
R + 1; X[R]
Y
– wkładanie elementu Y na koniec kolejki
F
F + 1; Y
X[F]
– usuwanie elementu z początku kolejki
Usprawnienie reprezentacji kolejki dwustronnej (lepsze
wykorzystanie pamięci, problem „przetaczającej się” kolejki):
X[1], .., X[M] – elementy ustawione w cykl, tak, że po X[M]
następuje element X[1]. Wtedy operacje mają postać:
jeśli R=M, to R
1, wpp R
R + 1; X[R]
Y
jeśli F=M, to F
1, wpp F
F + 1; Y
X[F]

Realizacja listy liniowej – tablice (3)
Problem przepełnienia (overflow, nadmiar elementów)
Problem niedomiaru (underflow, brak elementów)
Postać operacji dla stosu i kolejki dwustronnej:
X
Y (włóż na stos)
Y
X (usuń ze stosu)
X
Y (wstaw do kolejki)
`
Y
X (usuń z kolejki)
T
T+1;
jeśli T > M, to przepełnienie;
X[T]
Y;
jeśli T=0, to niedomiar;
Y
X[T];
T
T–1;
jeśli R=M, to R
1, wpp R
R+1;
jeśli F=R, to przepełnienie;
X[R]
Y;
jeśli F=R, to niedomiar;
jeśli F=M, to F
1, wpp F
F+1;
Y
X[F];

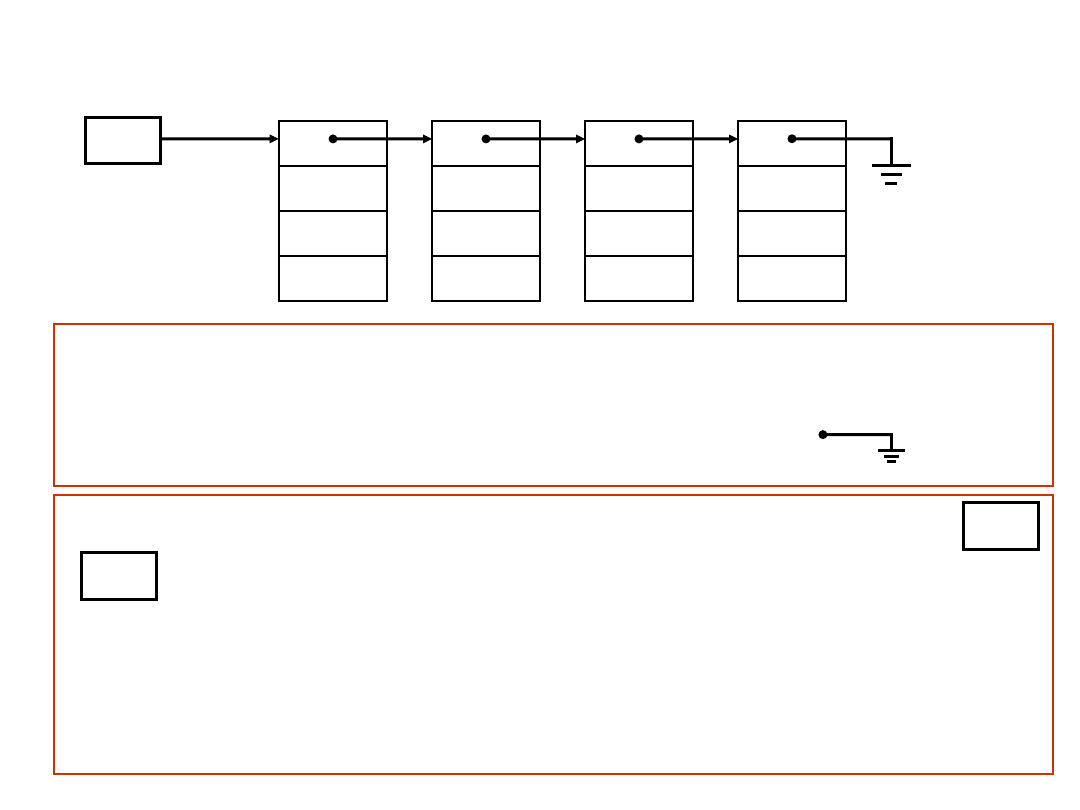
Realizacja listy liniowej – listy wskaźnikowe

Lista
p2
p3
p4
p2
p3
p4
p2
p3
p4
p2
p3
p4
Program wykorzystujący listę wskaźnikową musi pamiętać wskaźnik do
pierwszego elementu list
First
.
First

Porównanie realizacji listy liniowej z wykorzystaniem tablicy i wskaźników
• Struktura ze wskaźnikami wymaga dodatkowego pola na przechowywanie
wskaźnika.
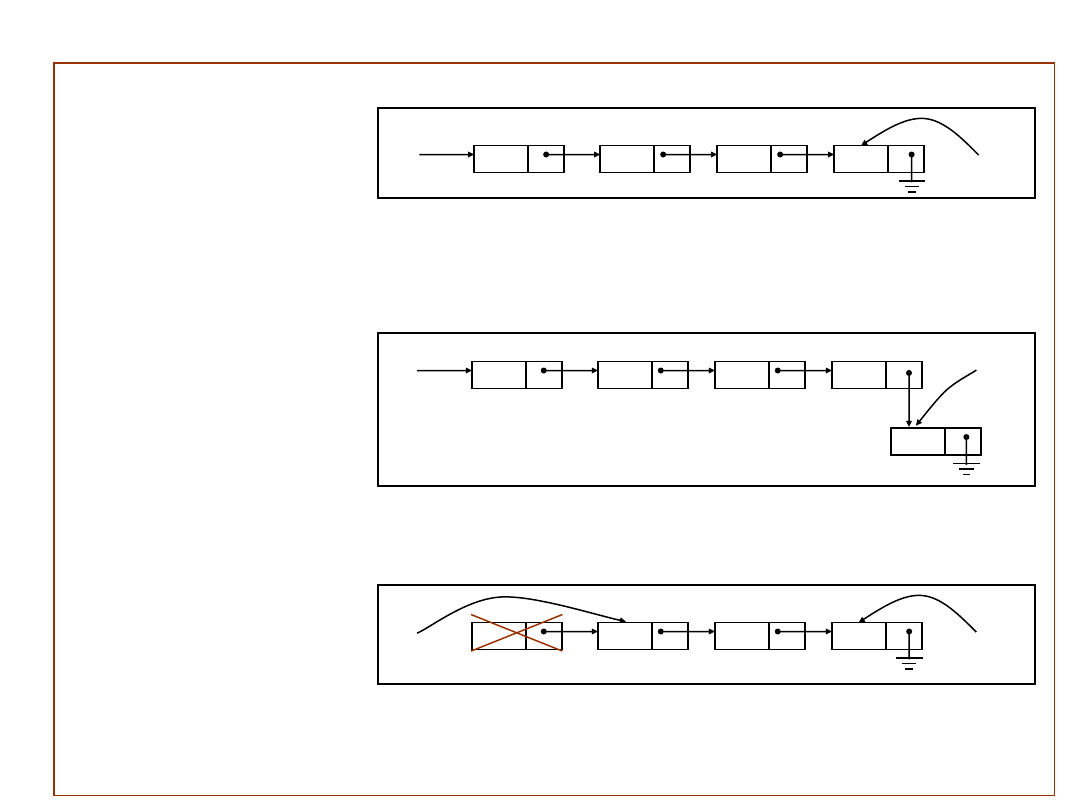
• Operacja usunięcia elementu z listy jest prosta – wymaga jedynie zmiany
wskaźnika w odpowiednim elemencie. W przypadku sekwencyjnego przydziału
pamięci operacja ta wymaga przemieszczenia całego fragmentu listy do innych
lokacji pamięci.
•Wstawianie elementu w środek listy wskaźnikowej jest prostą operacją.
Wymaga zmiany wskaźników w dwóch elementach.
p2
p3
p4
p2
p3
p4
p2
p3
p4
p2
p3
p4
First
p2
p3
p4
p2
p3
p4
p2
p3
p4
p2
p3
p4
p2
p3
p4
First
p2
p3
p4
p2
p3
p4
Porównanie realizacji listy liniowej z wykorzystaniem tablicy i wskaźników
– cd.
• Odwołania do dowolnego elementu listy jest szybsze w przypadku tablic.
Dostęp do k-tego elementu listy w postaci tablicy jest stały, dla listy
wskaźnikowej wymaga k przejść po wskaźnikach.
• Operacja łączenia list wskaźnikowych jest prostsza niż list przy użyciu tablic.
• Lista wskaźnikowa umożliwia budowę skomplikowanych struktur, np. zmienna
liczba list o zmiennej długości: element listy „głównej” jest wskaźnikiem do listy
podrzędnej, lub elementy struktury mają wiele dowiązań i połączone są
równocześnie w różnych porządkach, odpowiadając różnym listom.
• Operacje przeglądania kolejnych elementów listy są szybsze dla list
sekwencyjnych.
• Do tworzenia listy wskaźnikowej niezbędny jest mechanizm przydzielania,
zwalniania, sprawdzania, czy można pamięć przydzielić, czyli
gospodarowania
pamięcią
.
•
Sterta
– zbiór wszystkich elementów przeznaczonych do dynamicznego
przydzielania.
info
link
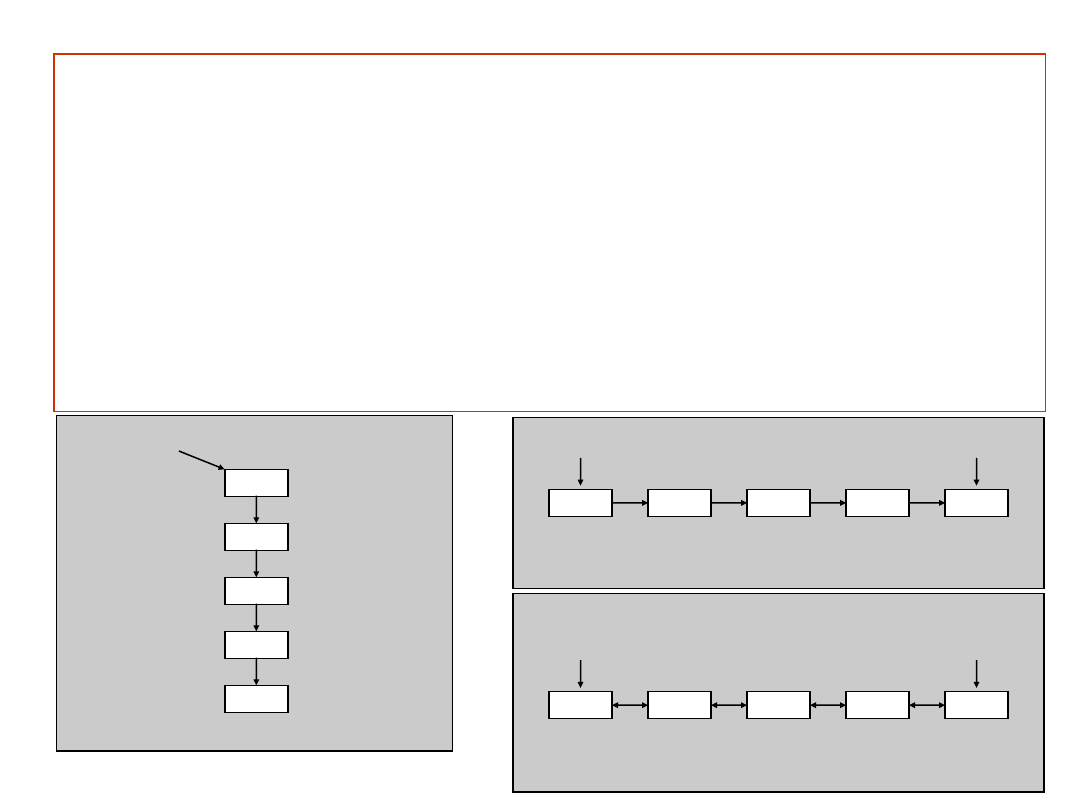
Uwaga: Zakłada się, że element listy ma postać:

Stos
– realizacja poprzez listę wskaźnikową.
Zmienna wskaźnikowa T – wskazuje na wierzchołek stosu.
T=
– stos pusty
Włożenie informacji Y na stos T (wykorzystanie dodatkowej
zmiennej wskaźnikowej P):
P
new (element);
info(P)
Y;
link(P)
T;
T
P;
Przypisanie informacji do Y z wierzchołka stosu i zdjęcie ze stosu tej informacji:
jeśli
T =
to niedomiar;
wpp{
P
T;
T
link(P);
Y
info(P);
delete(P);
}
T
Kolejka
– realizacja poprzez listę wskaźnikową.
Kolejka pusta:
F=
i R=Add(F);
Operacja wstawiania nowego elementu do kolejki:
P
new(element);
info(P)
Y;
link(P)
;
link(R)
P;
R
P;
Operacja usuwania elementu z kolejki:
jeśli F=
to niedomiar;
wpp{
P
F;
F
link(P);
Y
info(P);
delete(P);
jeśli F=
to R=Add(F);}
F
R
F
R
P, nowy element
F
R
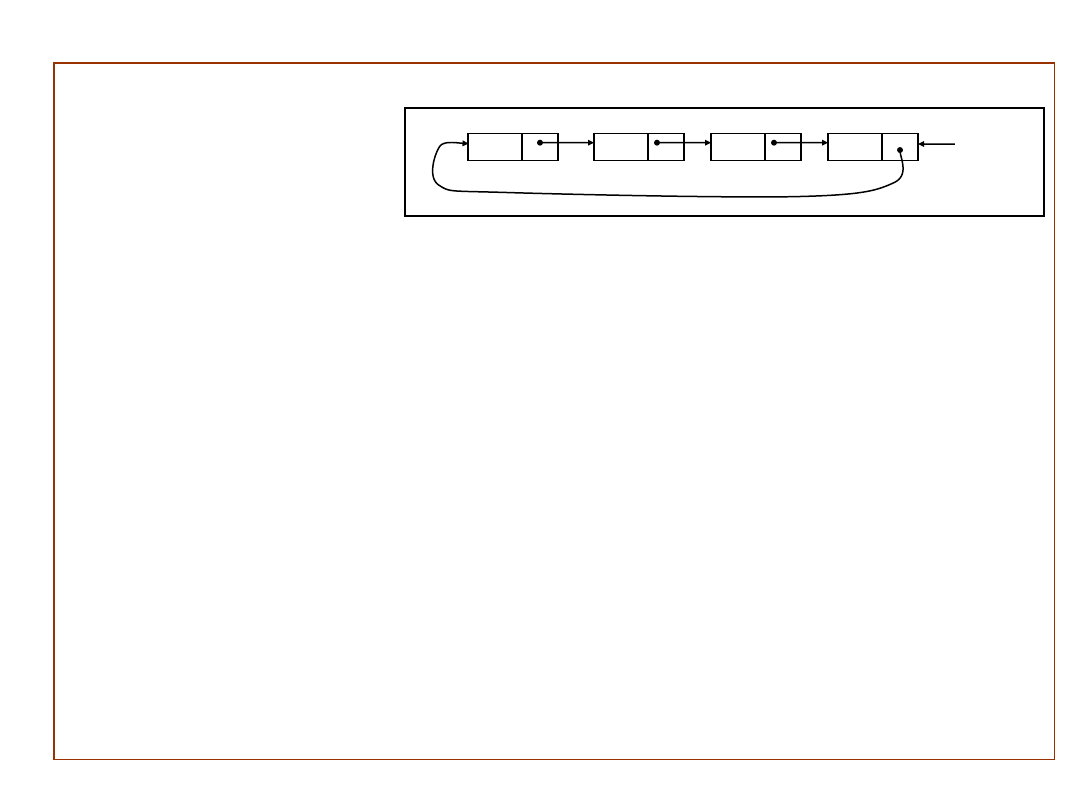
Lista cykliczna
– ostatni element listy wskazuje na pierwszy element.
Podstawowe operacje na listach cyklicznych:
PTR =
– lista pusta
Wstaw element Y z lewej strony:
P
new(element);
info(P)
Y;
jeśli PTR=
to PTR
link(P)
P;
wpp{
link(P)
link(PTR);
link(PTR)
P;
}
Wstaw element Y z prawej strony:
Wstaw Y z lewej strony;
PTR
P;
PTR
Usuń z listy lewy element:
jeśli
PTR=
to niedomiar
wpp{
P
link(PTR);
Y
info(P);
link(PTR)
link(P);
jeśli PTR=P to PTR
;
delete(P);

Dodawanie wielomianów z wykorzystaniem list cyklicznych
Problem: dodawanie wielomianów trzech zmiennych (x, y, z) o współczynnikach
całkowitych.
Element listy jest postaci:
i reprezentuje wyrażenie
coeff*x
A
y
B
z
C
Założenia:
1. znak słowa ABC jest zawsze równy + z wyjątkiem elementu specjalnego
reprezentującego koniec każdej listy, dla którego ABC= –1 i coeff=0.
2. elementy listy są zawsze ustawione w porządku malejącym względem pól ABC
(patrząc na listę zgodnie z kierunkiem dowiązań), przy czym element specjalny
wskazuje na element ABC o najwyższej wartości.
Przykład: x
6
– 6xy
5
+ 5y
6
link
C
B
A
coeff
0
0
6
+
+1
0
5
1
+
-6
0
6
0
+
+5
1
0
0
-
0
PTR

Algorytm: Dodawanie wielomianów.
Algorytm dodaje wielomiany: wielomian(P) i
wielomian(Q), reprezentowane przez listy. Wskaźniki do tych list to P i Q. Wynik
dodawania jest pamiętany w liście wskazywanej przez Q. Zmienne P i Q po wykonaniu
algorytmu mają z powrotem wartości początkowe. Zmienne Q
1
i Q
2
są wskaźnikowymi
zmiennymi pomocniczymi.
K1. Inicjalizowanie.
Podstaw P
link(P); Q
1
Q; Q
link(Q); Zmienne P i Q wskazują
na pierwsze wyrazy wielomianów.
K2. Porównanie ABC(P) i ABC(Q).
Jeśli ABC(P) < ABC(Q) {
Q
1
Q; Q
link(Q); powtórz krok K2}
Wpp{
Jeśli ABC(P) = ABC(Q) to krok K3;
Wpp krok K5; }
K3. Dodawanie współczynników.
Jeśli ABC(P) < 0 to STOP (zatrzymanie algorytmu);
Wpp{
coeff(Q)
coeff(Q) + coeff(P);
Jeśli coeff(Q)=0 to krok K4;
Wpp{
P
link(P); Q
1
Q; Q
link(Q); krok K2; }
K4. Usuwanie wyrazu zerowego.
Q2
Q; link(Q
1
)
Q
link(Q); delete(Q2);
P
link(P); krok K2;
K5. Wstawianie nowego wyrazu.
new(Q
2
); coeff(Q
2
)
coeff(P); ABC(Q
2
)
ABC(P); link(Q
2
)
Q;
link(Q
1
)
Q
2
; Q
1
Q
2
; P
link(P); krok K2.

Przykład: wywołanie algorytmu dodawania wielomianów dla wielomianów
x+y+z oraz x
2
–2y – z.

Algorytm: Mnożenie wielomianów.
Algorytm zastępuje wielomian(Q) wielomianem
postaci: wielomian(Q) + wielomian(M)*wielomian(P).
K1. Następny mnożnik.
Podstaw M
link(M). Jeśli ABC(M) < 0 to STOP.
Q
1
Q; Q
link(Q); Zmienne P i Q wskazują na pierwsze wyrazy wielomianów.
K2. Cykl mnożenia.
Wykonaj algorytm dodawania wielomianów, ale
1. każde wystąpienie ABC(P) w opisie algorytmu dodawania zamień na:
Jeśli ABC(P)<0 to –1;
Wpp ABC(P)+ABC(M)
2. Każde wystąpienie coeff(P) zamień na:
coeff(P)*coeff(M)
Wykonaj krok K1 algorytmu mnożenia wielomianów.
Wyszukiwarka
Podobne podstrony:
27 Struktury danych stos, kolejka, lista, drzewo id (2)
algorytmy listy stos kolejki
AiSD lista 3, zadanie 6
AiSD lista 7, zadanie 4
stos kolejka
LABORKA 3 (stos i lista)
Lista 2012 2
Polecenia lista 5
macierze i wyznaczniki lista nr Nieznany
Lista 14
Analiza matematyczna, lista analiza 2008 6 szeregi
Analiza III semestr lista nr 3 Nieznany (2)
lista produktow
podstawy automatyki ćwiczenia lista nr 4b
lista parafraz modu A
Lista watykańskich masonów
Lista czesci
eksploracja lab03, Lista sprawozdaniowych bazy danych
AiSD Wyklad4 dzienne id 53497 Nieznany (2)
więcej podobnych podstron