
Implementation of a Multi-level Inverter Based on Selective Harmonic
Elimination and Zig-Zag Connected Transformers
Chung-Ming Young, Sheng-Feng Wu, and Yan-Zhong Liu
Department of Electrical Engineering
National Taiwan University of Science and Technology
Taipei, Taiwan, R. O. C 106
Email :
young@ee.ntust.edu.tw
Abstract—This paper applies the selective harmonic elimination
(SHE) technique to determine the switching angles for a multi-
level inverter that cooperated with specially connected
transformer, zig-zag connection. With the ability to direct
controlling harmonics, SHE technique has the adaptability to
associate with apparatus which are congenitally immune to
specific harmonics, such as the zig-zag connection transformers.
In this paper the two sets of primary windings of the
transformers are supplied by two 6-switch full-bridge inverters
with 30 electrical degrees phase shift. Prohibited by the
transformers, harmonics with orders other than 12n±1 (n is
positive integral) will not appear in the line-to-line voltage of the
secondary side. Then, SHE technique is employed to handle
harmonics with orders equal to 12n±1, and controls the
amplitude of the fundamental. This paper obtains a set of precise
switching angles through off-line calculation and then employs a
digital signal processor to implement on-line calculation of the
switching angles by an approximate method. Some selected
analysis and experimental results are shown in this paper. A
small-size prototype is built to verify the validity of the proposed
system.
Keywords-selective harmonic elilimation (SHE); transformer;
half-wave-symmetry; digital signal processor
I.
I
NTRODUCTION
The technique of selective harmonic elimination (SHE) has
been developed for more than forty years [1],[2]. The primary
advantages of SHE include providing lower switching
frequency, direct controlling harmonic components, and
optimizing particular objects [3]. Thus SHE is a popular
choice among different methods of modulation in many static
power conversion applications [4],[5]. Depending on the
applications, such as the topology of inverters and the number
of phase, there are many perspectives can be used to formulate
the SHE problems [1],[2]. After the problem is formulated, a
set of nonlinear equations, traditionally generated form
Fourier series representation and the optimizing objective
function both based on the specific perspective, has to be
solved before obtaining the desired switching angles. It is well
known that on-line solving these nonlinear equations have
been an obstacle to engineers who are trying to apply SHE
technique in their systems [3],[6]. Moreover, once the number
of variables in the nonlinear equations increases, the burden of
calculating also increases significantly. Thus most SHE
applications use off-line calculation to ease the complication
of the system [5]. To reduce the number of variables, the
output waveforms are always constrained to be symmetric. For
example, by making half-wave-symmetry assumption to SHE
formulations, even harmonics are eliminated automatically.
Furthermore, quarter-wave-symmetry assumption, which
imposes more constraints but requires lesser variables, is more
popular than half-wave-symmetry assumption. With quarter-
wave-symmetry assumption, all harmonics have either 0 or
180 degrees phase shift with respect to the fundamental, while
half-wave-symmetry assumption allows harmonic phasing to
vary [7],[8]. Although the former is convenient for solving the
nonlinear equations, it often results in sub-optimal solutions.
With the ability to direct controlling harmonics in the
output waveform, SHE techniques have the adaptability to
associate with apparatus which are congenitally immune to
specific harmonics, such as the zig-zag connection
transformers. When SHC associates with such electric
apparatus, the strategy of SHE can leave those specific
harmonics uncontrolled or maximize them and focus efforts
on harmonics for which are most concerned. According to this
strategy, either the lowest switching frequency or output
distortion can be achieved.
In some dc/ac applications the output transformers are
deployed to adjust the voltage level between primary and
secondary sides and/or to meet the isolation requirement. For
example, the static inverter (SIV), as shown in Fig. 1, which
provides ac power for air conditioning and lighting on electric
trains in Taiwan, deploys two three-phase transformers with
zig-zag connection in their secondary windings. It can be
shown that ,with this kind of connection, harmonics with
orders other than 12n±1 present in the primary windings will
be trapped in the secondary windings and absent in the line-to-
line voltages of the secondary side.
In this paper, SHE technique with half-wave-symmetry
assumption is investigated to obtain the switching angles for
an inverter system that deploys two zig-zag connection
transformers in output stage. The two sets of primary windings
of the transformers are supplied by two 6-switch full-bridge
inverters with 30 electrical degrees phase shift. As mentioned
above, harmonics with orders other than 12n±1 will not appear
in the line-to-line voltage in the secondary side. Thus, SHE
technique with half-wave symmetry is employed to handle
harmonics with orders equal to 12n±1, and control the
The authors would like to thank the National Science Council for
financial supporting. The work was sponsored by NSC-94-2218-E-011-145
PEDS2009
387
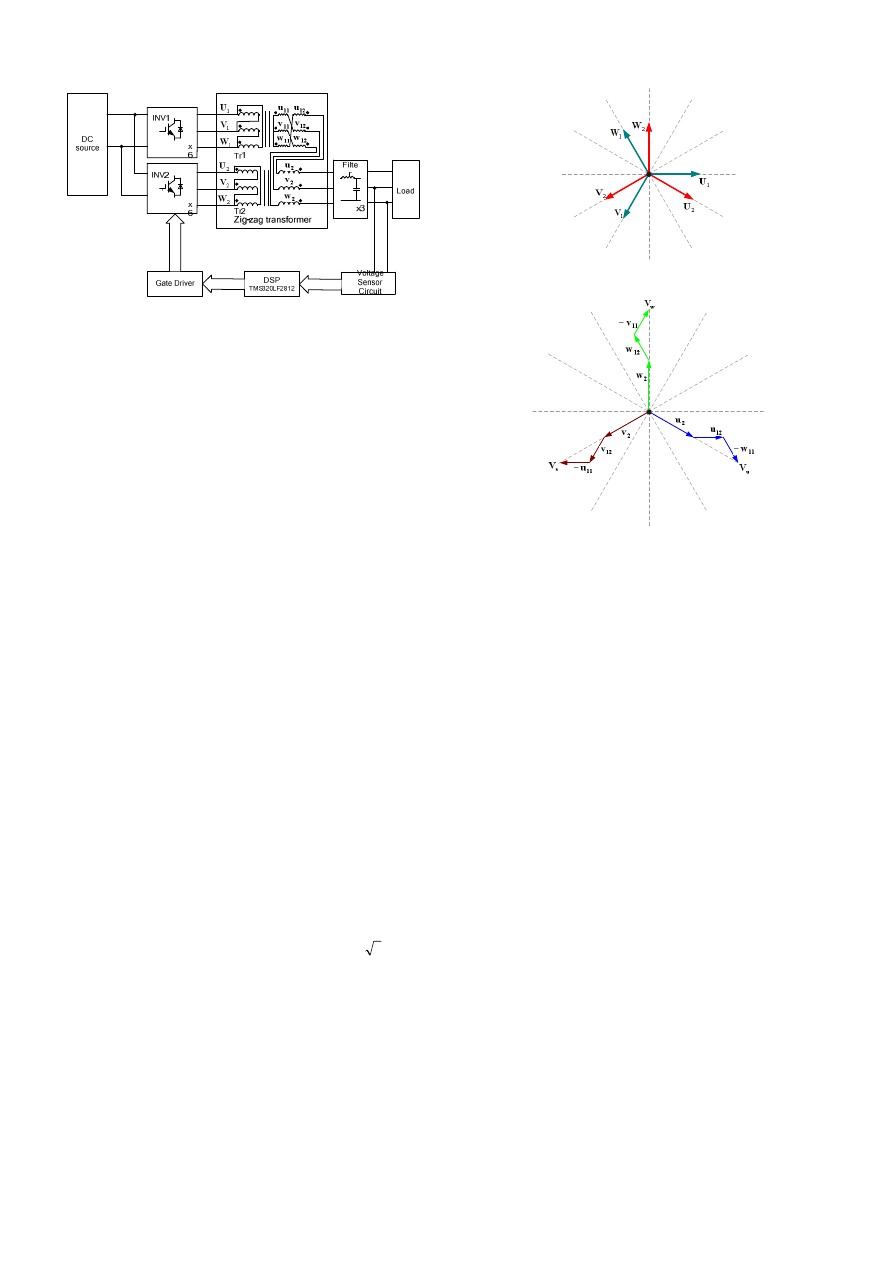
Figure 1. The diagram of the proposed system
(a)
(b)
Figure 2. Fundamental phasor diagrams of zig-zag transformers, (a)
primary,(b) synthesize of secondary
amplitude of the fundamental. The uncontrolled harmonic
profiles of the output waveform obtained under half-wave-
symmetry assumption are different form those with quarter-
wave-symmetry assumption. In other words, it is possible that
the former provides better solutions than the latter in this
application. Based on the strategy that the fundamental is
controllable and 11th and 13th harmonics are eliminated, a set
of full-range (both amplitude and phase of the fundamental)
solutions with three switching angles are obtained. By the
helping of the transformers, we can choose the switching
angles with minimum 23rd and 25th harmonics, which are the
most concerned in this paper. Some selected analysis and
experimental results are shown in this paper. A small-size
prototype is built to verify the practical validity of the
proposed system.
The paper is organized as follows. In section II, the
proposed system and the characteristics of zig-zag transformers
are described. SHE strategy with half-wave-symmetry
assumption is given in section III. The on-line calculation
based on approximate method is presented in Section IV.
Section V shows some experimental results. Conclusions are
summarized in Section VI.
II. S
YSTEM DESCRIPTION AND
C
HARACTERISTICS OF
Z
IG
-
Z
AG
T
RANSFORMERS
Fig. 1 shows the diagram of the proposed system which
includes two inverters, two transformers, and a DSP-based
controller, which executes on-line calculation to obtain the
switching angles and carries out the voltage regulation at the
filtered output. These two transformers, denoted as Tr1 and
Tr2, have delta connections in the primary sides, while the
secondary windings of the Tr1, which has two identical
windings in each phase, employ interconnection and then are
in series with the secondary windings of Tr2. The turn ratio
between secondary windings of Tr1 and Tr2 is
3
:
1
and the
turn ratio between primary and secondary is dependent on
voltage levels of both sides. This special connection of the
secondary windings of the transformers provides immunity
from some harmonics. Before taking this advantage, an
assumption has to make first, that is, these two transformers
have to be supplied by two phase-shifted ac sources with 30
electrical degrees. Under this assumption, Fig. 2 shows the
phasor diagrams of the fundamental voltages of the
transformers.
x
U
,
x
V
and
x
W
, where
1
x
=
and
2
, are denoted
as the primary voltage phasors of Tr1 and Tr2 respectively,
and
11
u
,
11
v
,
11
w
,
12
u
,
12
v
,
12
w
,
2
u
,
2
v
,
2
w
denoted as the
secondary voltage phasors of Tr1 and Tr2 respectively. It can
be seen that the output side (secondary side) is basically in Y-
connection and each phase is composed of three phasors.
Thus, the line-to-line voltages of the secondary side can be
expressed as
2
12
11
11
12
2
uv
v
v
u
w
u
u
V
−
−
+
−
+
=
(1)
2
12
11
11
12
2
vw
w
w
v
u
v
v
V
−
−
+
−
+
=
(2)
2
12
11
11
12
2
wu
u
u
w
v
w
w
V
−
−
+
−
+
=
(3)
where
uv
V
,
vw
V
and
wu
V
are phasors of the line-to-line
voltages of the secondary.
As shown in Fig. 1, the two transformers are individually
supplied by two inverters, denoted as INV1 and INV2, which
receive switching signals from the digital controller. Through
proper time delay, it is easy for the digital controller to
generate switching signals that trig the inverters’ switches and
then provides two balanced three-phase ac sources with 30
degrees phase shift between their fundamentals in spite of the
pulse-width-modulation (PWM) methods. The proposal
switching signals, which are determined by SHE technique,
will be detailed later in this paper.
PEDS2009
388
1
α
2
α
3
α
1
(deg.)
γ
So
lu
tions
(d
eg
.)
i
α
Figure. 3. Solutions
i
α
at a modulation index of 1.0 as
1
γ
varying
from 0
° to 360° with harmonic control of eliminating 11th and 13th
harmonics.
1
φ
2
φ
3
φ
1
(deg.)
γ
Sol
uti
on
s
(de
g.
)
i
φ
Fig. 4. Three corresponding phase-shift angles of each quasi-
square wave at unit modulation index of 1.0 as 1
γ
varying
from 0
° to 360° with harmonic control of eliminating 11th
and 13th harmonics.
T
ABLE
I
C
ALCULATING
uv
V
WITH RESPECT TO DIFFERENT HARMONICS
Order of harmonic
2
u
12
u
11
w
11
u
12
v
2
v
uv
V
1
1.5-j0.866
1
-0.866+j1.5
1
-0.866-j1.5
-1.5-j0.866
6.735
3+12m
-j1.733
1
-1
1
-1
j1.733
0
5+12m
-1.5-j0.866
1
0.5+j0.866
1
0.5-j0.866
-1.5+j0.866
0
7+12m
-1.5+j0.866
1
0.5-j0.866
1
0.5+j0.866
-1.5-j0.866
0
9+12m
j1.733
1
-1
1
-1
-j1.733
0
11+12m
1.5+j0.866
1
-0.5-j0.866
1
-0.5+j0.866
-1.5+j0.866
5.997
13+12m
1.5-j0.866
1
-0.5+j0.866
1
-0.5-j0.866
-1.5-j0.866
5.997
In most case, the output waveforms of the inverters contain
fundamental and several harmonic components as well. As
mentioned above, the phase-shift angle between the
fundamentals of the outputs of INV1 and INV2 is 30 degrees,
that means the fundamental of
1
U
is leading the fundamental
of
2
U
by 30 degrees, while the h-th harmonic of
1
U
is leading
the harmonic of
2
U
by 30
×
h degrees, where h is integer.
Equations (1)-(3) are not only useful to determine the
fundamentals in the line-to-line voltages, but also available to
determine the harmonics, except that different order of
harmonic has different phase angle. By calculating (1)-(3), it
can be proved that harmonics with orders other than 12n
±
1
will not appear in the line-to-line voltage in the secondary side.
Table I shows the calculating results of (1) for harmonics
with and without orders of 12n
±
1. For convenience,
11
u
is
selected as the reference phasor with unit amplitude and zero
phase angle. For harmonics with orders 3+12m,
where
"
2,
,
1
,
0
=
m
, the individual phasor of the six terms in
the left side of (1) have the identical phasor representations and
the results of
uv
V
are all zeros. Moreover, the harmonics with
orders k+12m, where
9
and
7
5,
,
3
=
k
, have similar
formalizations. Nevertheless, the harmonics with orders
11+12m and 13+12m, i.e. 12n
±
1, have non-zero
uv
V
. As all
odd-order harmonics are considered in Table I, it can conclude
form above that harmonics with orders other than 12n
±
1
present in the primary windings will be trapped in the
secondary windings and absent in the line-to-line voltages of
the secondary side. Identical results of calculating
vw
V
and
wu
V
can be obtained from (2) and (3) respectively.
III. SHE
STRATEGY WITH HALF
-
WAVE
-
SYMMETRY
ASSUMPTION
The Fourier series representations of a two-level k-notch
half-wave-symmetric waveform are given by (4) and (5)
4
(2
( 1) cos
sin
)
p
p
k
real
i
h
h
p i
p i
p
i
a
h
h
h
α
φ
π
=
=
−
×
∑
F
∀
h N
∈
(4)
4
(1 2
( 1) cos
cos
)
p
p
k
imag
i
h
h
p i
p i
p
i
b
h
h
h
α
φ
π
= −
= −
+
−
×
∑
F
∀ h N
∈
(5)
where
p
h
is the
p
-th element in a set of controlled
harmonics
N
having
k
elements,
α
is a vector of length
k
with each element
i
α
representing the
i
-th notching,
φ
is a
vector of length
k
with each element
i
φ
representing the
phase-shift angle corresponding to the
i
-th quasi-square wave.
The harmonic content can also be described in polar
coordinates such that
( )
cos
real
h
p
p
F
m
γ
=
(6)
( )
sin
imag
h
p
p
F
m
γ
=
(7)
PEDS2009
389
1
(deg.)
γ
1
m
1
(d
eg
.)
α
1
(deg.)
γ
1
m
1
(d
eg
.)
φ
(a) (b)
1
(deg.)
γ
Modulation index
1
m
2
(d
eg
.)
α
Selected solution trajectory
1
(deg.)
γ
1
m
2
(d
eg
.)
φ
(c) (d)
1
(deg.)
γ
1
m
3
(d
eg
.)
α
1
(deg.)
γ
1
m
3
(d
eg
.)
φ
(e) (f)
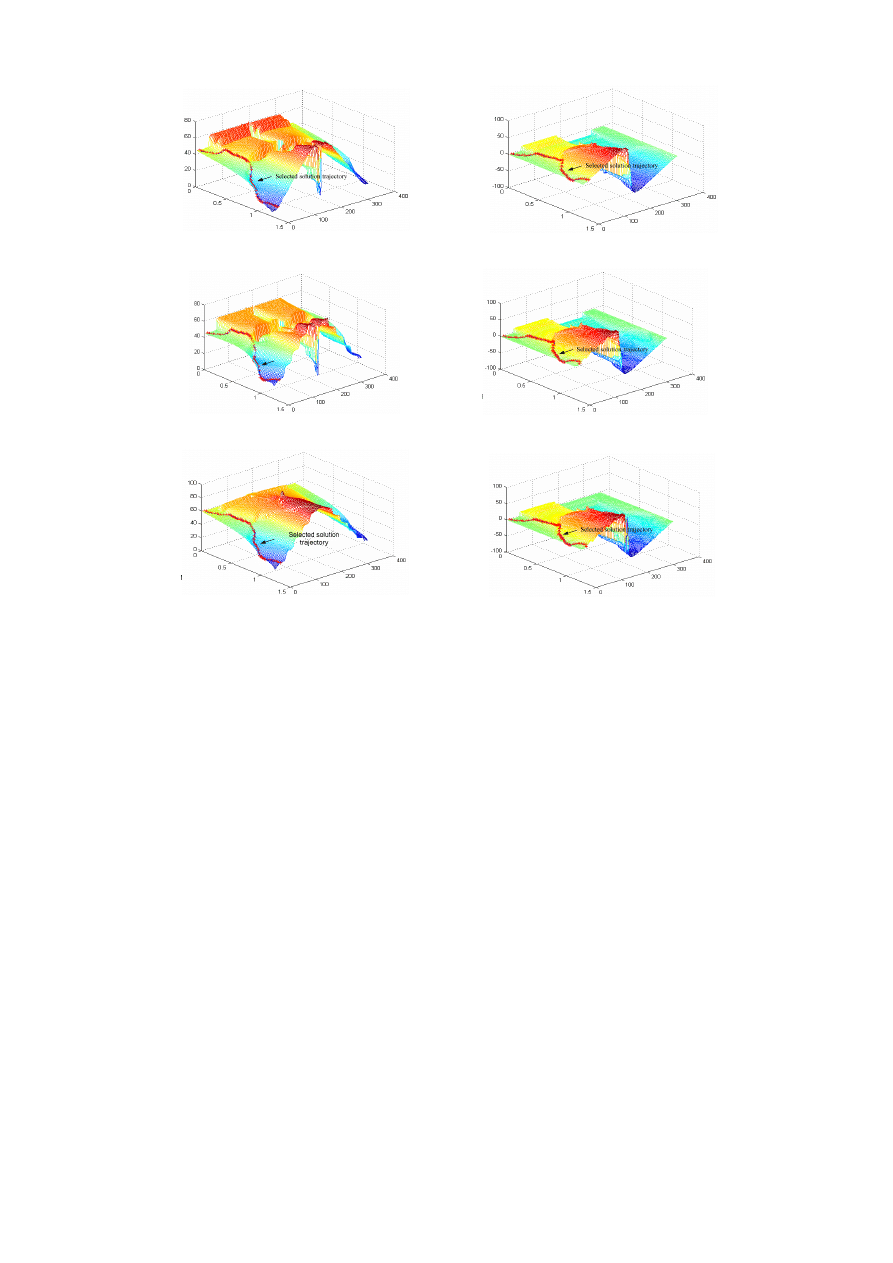
Fig. 5. 3-dimension graphs of the solution angles. (a)
1
α ,(b)
1
φ ,(c)
2
α ,(d)
2
φ (e)
3
α ,(f)
3
φ .
where
p
m is the magnitude and
p
γ
is the phase of the p th
harmonic in the set N . It should be noted that (4) and (5) are
constructed by a fixed square wave and k quasi-square waves.
When the harmonic phase
p
γ
varies, both
i
α
and
i
φ
are
variables but the square wave is still fixed. Equations (4) and
(5) imply a half-wave symmetry which guarantees that the
even harmonics will be zero. If there are k notch angles in the
period of first-half cycle, it will generate 2k variables
including k notch angles and k phase-shift angles. Thus it
brings k
controllable conditions. These k controllable
conditions result in 2 k equations, k real part equations and
k image part equations respectively. Being a nonlinear
equation set, it can be solved by some numerical solvers such
as Newton-Rephson method which provides faster
convergence speed. It should be note the solutions need to
meet the following conditions, otherwise they will be ignored.
1
2
0
90
i
α α
α
≤
≤
≤
≤
"
(8)
1
1
2
2
(
) (
)
(
)
i
i
α φ
α φ
α φ
+
≤
+
≤
+
"
(9)
1
1
1
1
(
) (
)
(
)
i
i
i
i
π α φ
π α
φ
π α φ
−
−
− +
≤
−
+
≤
−
+
"
(10)
In this paper, a SHE-PWM waveform with 3 notch angles
and 3 corresponding phase-shift angles are considered, and
controllable fundamental, zero 11-th harmonic and zero 13-th
harmonic are the three conditions. The equation set for problem
considered in this paper is given by (11). To satisfy these three
conditions described above, the amplitude modulation index
1
m is substituted by the desired fundamental magnitude, and
both
11
m and
13
m are set to zero. The last controllable factor
1
γ
is free to vary. It does not change the harmonic magnitude of
the controlled harmonics, but the uncontrolled harmonic
components will change with different
1
γ
. The next two lowest
order harmonics in this system are 23rd and 25th harmonics
that can be attenuated by choosing suitable
1
γ
. One set of
solutions at
1
m
=1 and
1
0
γ
= ° are
°
=
23
.
17
1
α
,
°
=
72
.
19
2
α
°
=
49
.
28
3
α
,
°
=
=
=
0
3
2
1
φ
φ
φ
.
Then,
1
γ
is incremented step by step and the solutions
obtained from the present step are used as initial value for the
next step. For the continuity of the solutions and to avoid
divergence, the incremental scale is two degrees. The solutions,
three notch angles and three corresponding phase-shift angles,
PEDS2009
390
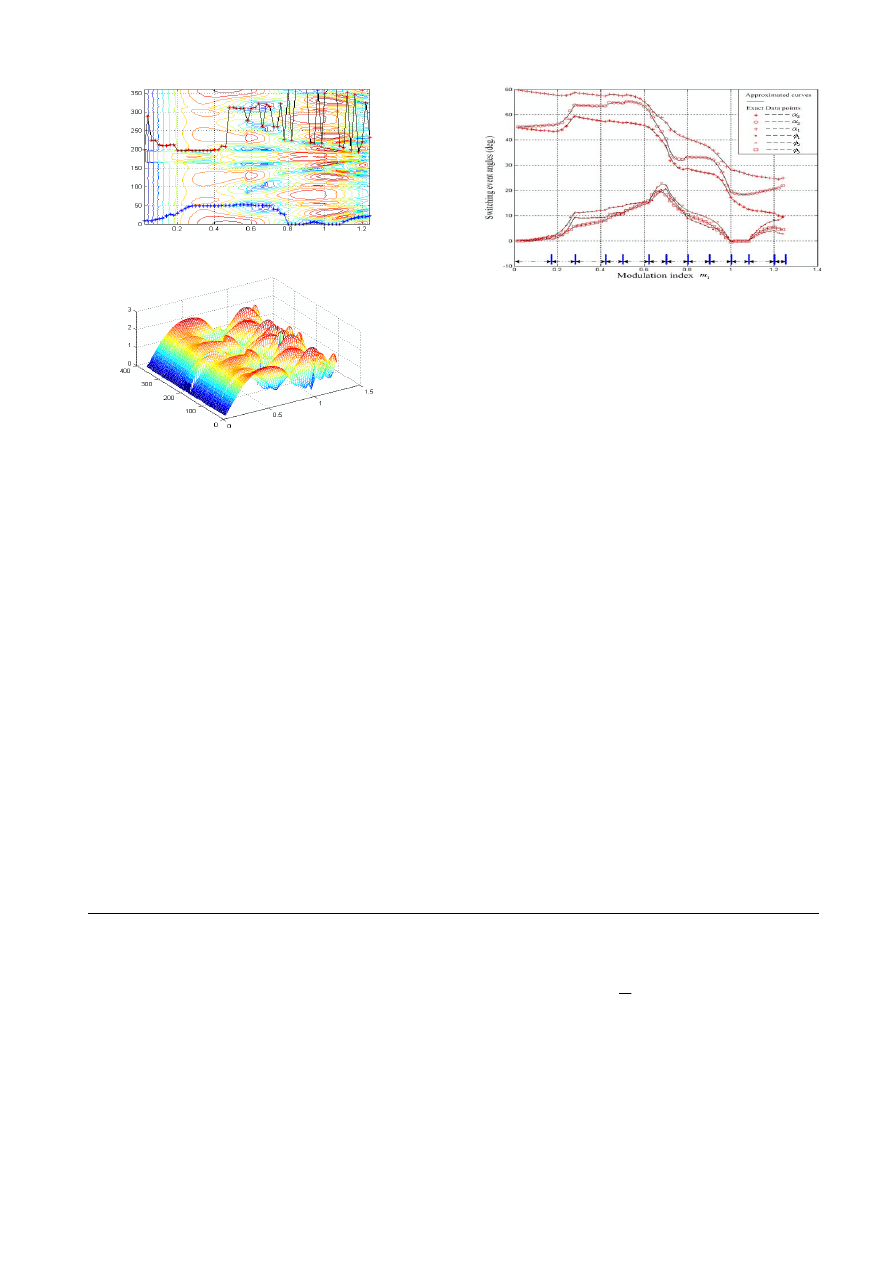
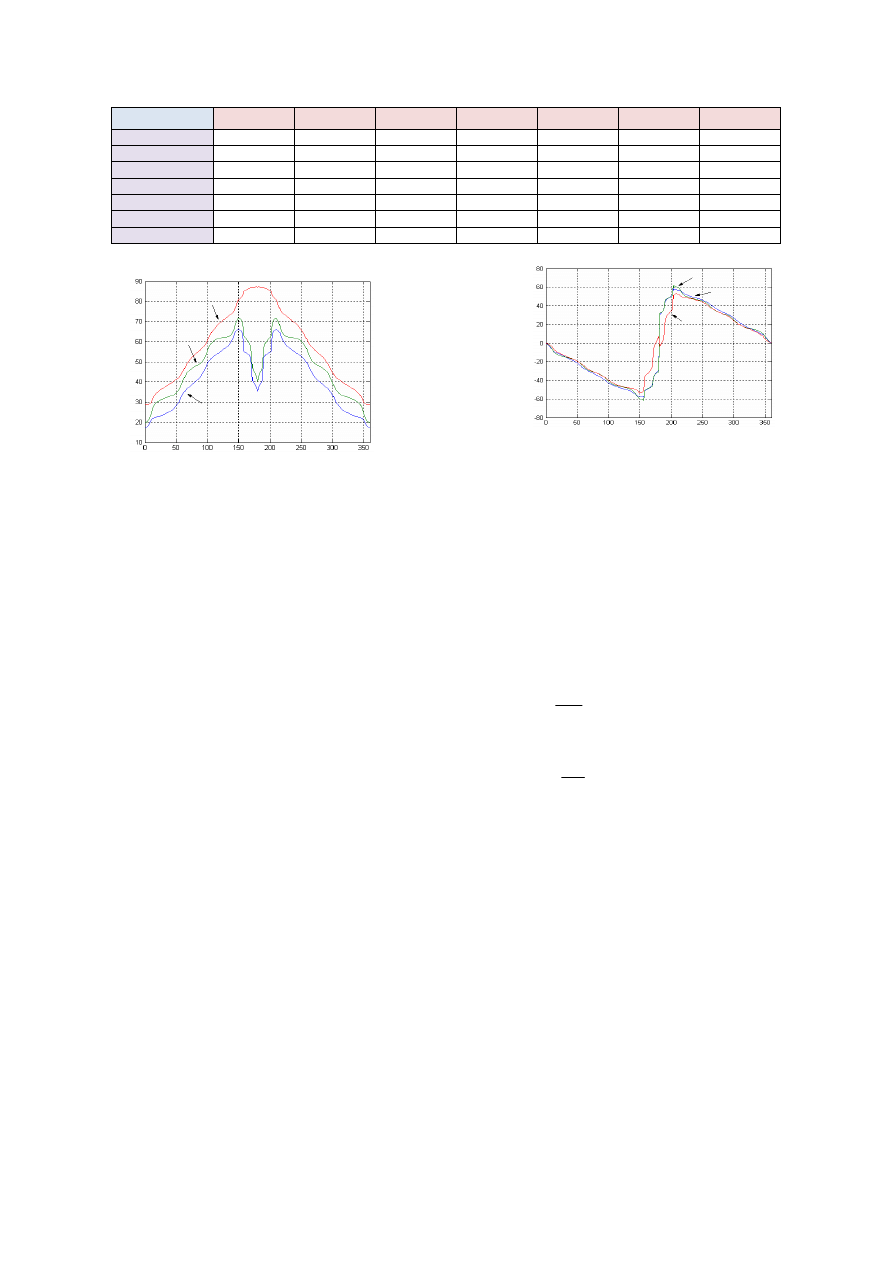
Fig. 7. The relationship between the exact data points and the appro-
ximated parabola segments.
1
m
1
(de
g.
)
γ
Route A
Route B
Modulation index
(a)
1
m
1
(deg .)
γ
23
,2
5
V
Modulation index
(b)
Fig. 6. (a) The contour of the rss value of 23rd and 25th harmonics, (b) 3-
D graph of the rss value of 23rd and 25th harmonics.
for
1
γ
varying from 0 to 360 degrees with fundamental
remaining unity are shown in Fig. 3 and Fig. 4.
It is worthy to mention that the solutions of
i
α
are
symmetric to the vertical line through 180 degrees and the
solutions of
i
φ
are symmetric to the point of
(
1
180
γ
=
° ,
0
i
φ
= ° ). These relationships simplify the
calculation work and only the first half range of
1
γ
needs to
deal with. These symmetric relationships are described in (12)
and (13).
(
)
(
)
i
i
α π ψ
α π ψ
+
=
+
(12)
(
)
(
)
i
i
φ π ψ
φ π ψ
+
= −
−
(13)
where the
ψ
can take any value from 0
° to 180° .
Next, the same processes are used to solve this problem at
different
1
m . Whenever the modulation index is increased or
decreased, the problem is solved by using the previous
solutions as initial values for the next step. After solving the
problem over the whole ranges of
1
m and
1
γ
, the solutions of 3
notch angles and 3 corresponding phase-shift angles can be
represented by 6 3-dimension graphs as shown in Fig.5. In each
3-dimension graph, x-axis and y-axis are denoted as
1
m and
1
γ
respectively, while z-axis is denoted as the solution angle.
According to the discussion on the previous section, the
harmonic distribution changes by varying the fundamental
phase
1
γ
. It can choose suitable solutions with respect to
1
γ
which minimizes 23rd and 25th harmonics. Therefore, the
root-sum-square values of 23rd and 25th harmonics, denoted
as
23,25
V
, contained in the output line-to-line voltage are
calculated over the full ranges of
1
m
and
1
γ
. Fig.6(a) shows
the contour map of the
23,25
V
and its 3-D diagram also shows
in Fig. 6(b). After searching the contour, the route with the
minimum
23,25
V
over the whole range of
1
m
is identified as
route A in Fig. 6(a). However route A is seriously tortuous and
is not suitable for on-line calculation by curve-fitting
approximation, which will be employed later in this paper.
Therefore, finding another routes with both relative-low
23,25
V
and acceptable smoothness is necessary. According to this
strategy, a smother route is chosen and marked as route B in
Fig. 6(a). Along route B, even its
23,25
V
is not the lowest, it
provides moderate smoothness so that on-line calculation based
on curve-fitting approximation can be implemented easily.
Once the route is decided, the solutions of notch angles
corresponding to the chosen route can also compose another
six routes which are shown in Fig. 5(a)-(f) by the marking
signs. The relationships between the solution angles and
1
m
corresponding to route B are shown in Fig. 7.
IV. O
N
-
LINE CALCULATION BASED ON
A
PPROXIMATED
P
OLYNOMIAL
D
ERIVED FROM
C
URVE
-F
ITTING
M
ETHOD
For avoiding burdened-on-line calculation, look-up table
derived from off-line calculated solutions is popular to
( )
1
1
2
2
2
2
1
1
2
2
2
2
1
1
2
2
2
2
1
1
2
2
3
3
1
2 cos
sin
2cos
sin
2cos
sin
2 cos11
sin11
2cos11
sin11
2cos11
sin11
2 cos13
sin13
2 cos13
sin13
2 cos13
sin13
,
1 2cos
cos
2cos
cos
2 cos
cos )
1 2cos11 cos1
F
α
φ
α
φ
α
φ
α
φ
α
φ
α
φ
α
φ
α
φ
α
φ
α φ
α
φ
α
φ
α
φ
α
−
×
+
×
−
×
−
×
+
×
−
×
−
×
+
×
−
×
=
− +
−
+
− +
( )
( )
( )
( )
( )
( )
1
1
11
11
13
13
1
1
1
2
2
3
3
11
11
1
1
2
2
3
3
13
13
cos
11
cos
13
cos
4
sin
1
2cos11
cos11
2 cos11
cos11
11
sin
1 2cos13 cos13
2 cos13
cos13
2 cos13
cos13
13
sin
m
m
m
m
m
m
γ
γ
γ
π
γ
φ
α
φ
α
φ
γ
α
φ
α
φ
α
φ
γ
⎡
⎤
⎡
⎤
⎢
⎥
⎢
⎥
×
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
×
⎢
⎥
=
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
−
+
⎢
⎥
×
⎢
⎥
⎢
⎥
⎢
⎥
− +
−
+
⎣
⎦
⎢
⎥
×
⎣
⎦
(11)
PEDS2009
391
implement SHE technique in many applications. However this
approach incurs mass memory occupancy and lacks flexibility.
Accessing the switching angles by approximated polynomials
using curve-fitting method is comparatively feasible [9]. In this
paper, the switching angles including their phase-shift angles
obtained from route B described in previous section are divided
into twelve segments as shown in the bottom of Fig. 7. Then,
the solutions of each angle in each segment are fitted by a
second-order polynomial obtained from least-square method,
and the coefficients of these parabolas are stored in the digital
controller. Constrained by the space, only the parabola
equations corresponding to range of
1
m
between 0.5 to 0.62,
which is one of the twelve segments, are given
(14)
37
.
35
75
.
134
41
.
84
)
(
68
.
9
72
.
51
46
.
19
)
(
73
.
29
08
.
147
33
.
120
)
(
49
.
63
65
.
462
55
.
441
)
(
59
.
79
58
.
503
39
.
470
)
(
40
.
11
55
.
139
62
.
137
)
(
1
2
1
1
3
1
2
1
1
2
1
2
1
1
1
1
2
1
1
3
1
2
1
1
2
1
2
1
1
1
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
−
+
−
=
−
+
−
=
−
+
−
=
−
+
−
=
−
+
−
=
+
−
−
=
m
m
m
m
m
m
m
m
m
m
m
m
m
m
m
m
m
m
φ
φ
φ
α
α
α
The number of segments and the orders of polynomials
are a compromise between accuracy of switching angle and
burden of calculation.
According to the desired amplitude
modulation index, the corresponding switching angles can be
calculated rapidly and precisely.
V.
E
XPERIMENTAL
R
ESULTS
According to the diagram shown in Fig. 1, a small-size
prototype is built to prove the validity of the proposed system.
In addition to the transformers, power stages and filter, a
digital-signal-processor chip (TMS320LF2812) is used to
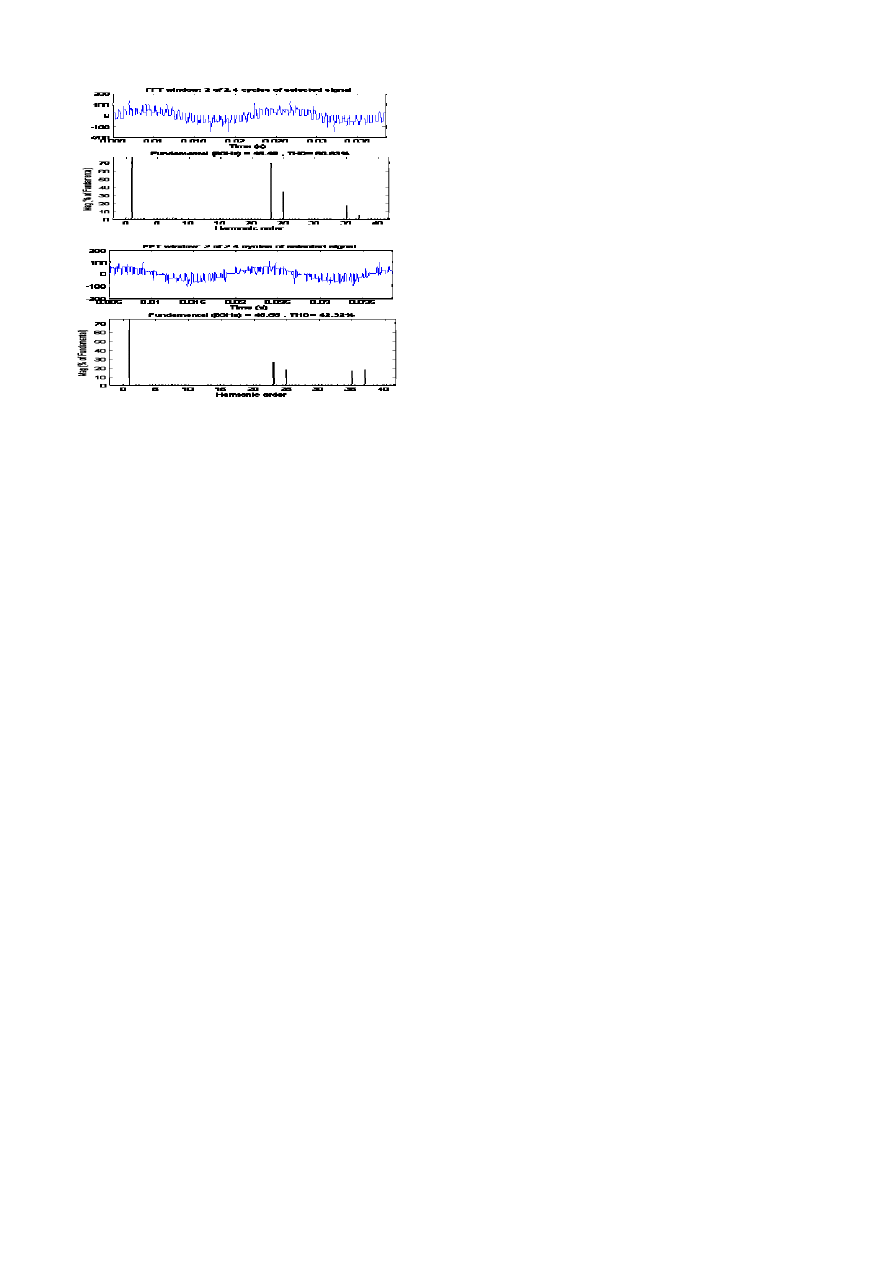
implement the digital controller. Fig. 8 shows the waveforms
and spectrums of output line-to-line voltages with same
1
m but
with different
1
r
. In Fig. 8, the waveform with
1
r
=
°
50
and
1
m =0.5, which is a point of route B, has lower 23-rd and 25-th
harmonics than the waveform with
1
r
= 0
° and
1
m =0.5, which
is corresponding to quarter-wave-symmetry assumption. The
two lowest harmonics reduce from 69.78% and 35.61% to
27.62% and 19.39% respectively with next two higher order
harmonics slightly increasing. Moreover, the total harmonic
distortion reduces from 80.83% to 42.32% as well.
VI.
C
ONCLSION
This paper has proposed an SHE strategy with half-wave
symmetry assumption for use in a multi-level inverter system
cooperated with zig-zag connected transformers. Prohibited by
the transformers, only harmonics with orders 12n
±
1 appear in
the output line-to-line voltage. Therefore, SHE technology is
employed to handle these characteristic harmonics and a set of
three-notch-angle solutions, which eliminates 11-th and 13-th
harmonics, with full range of modulation index and
fundamental phase angle is obtained. A subset of solutions,
which is approximated by second-order polynomials for on-
line calculation, has been chosen to minimize 23-rd and 25-th
harmonics. Experimental results have shown the validity of the
proposed system.
R
EFERENCES
[1] H. S. and R. G. Hoft, “Generalized harmonic elimination and voltage
control in thyristor inverters: Part Ⅰ─harmonic elimination,” IEEE
Trans. Ind. Applicat., vol. IA-9, no. 3, PP. 310-317, May/Jun. 1973.
[2] ─, “Generalized harmonic elimination and voltage control in thyristor
inverters: Part Ⅱ ─ voltage control technique, ” IEEE Trans. Ind.
Applicat., vol. IA-10, no. 5, pp. 666-673, Sep/Oct. 1974.
[3] J. Sun, S. Btephan, and H. Grotstollen, “Optimal PWM Based on Real-
Time Solution of Harmonic Elimination Equations,” IEEE Trans. on
Power Electron., vol. 11, no. 4, pp. 612-621, July. 1996.
[4] J. R. Espinoza, G. Joos, J. I. Guzman, L. A. Moran, R. P. Burgos,”
Selective Harmonic Elimination and Current/Voltage Control in
Current/Voltage-Source Topologies: A Unified Approach,” IEEE Trans.
on Industrial Electronics, vol. 48, no. 1,pp. 71-81, February. 2001.
[5] V. G. Agelidis, A. I. Balouktsis, and M. S.A. Dahidah, “A Five-Level
Symmetrically Defined Selective Harmonic Elimination PWM Strategy:
Analysis and Experimental Validation,” IEEE Trans. Power Electron.,
vol. 23, no. 1, Jan., 2008.
[6] A. I. Maswood, “PWM SHE Switching Algorithm for Voltage Source
Inverter,” in Proc. IEEE Power Electron. Drive and Energy System
Conf., Dec. 2005, pp. 1–4.
[7] J. R. Wells, B. M. Nee, P. L. Chapman, and P. T. Krein, “Selective
harmonic control: A general problem formulation and selected
solutions,” IEEE Trans. Power Electron., vol. 20, no. 6, pp. 1337–1345,
Nov. 2005.
[8] Alireza Lhaligh, Jason R. Wells, Patrick L. Chapman, Philip T. Krein, “
Dead-Time Distortion in Generalized Selective Harmonic Control,”
IEEE Trans. Power Electron., vol. 23, no. 3, pp. 1511–1517, May. 2008.
[9] N. A. Azli, and A. H. Yatim, “Curve Fitting Technique for Optimal
Pulsewidth Modulation (PWM) Online Control of a Voltage Source
Inverter (VSI),” in proc. TENCON 2000, vol. 1, pp. 1337–1345, 2005.
(a)
(b)
Fig. 8. Waveforms and spectrums of line-to-line output voltages. (a)
°
= 0
1
r
and
5
.
0
1
=
m
. (b)
°
= 50
1
r
and
5
.
0
1
=
m
PEDS2009
392
Wyszukiwarka
Podobne podstrony:
A New Low Cost Cc Pwm Inverter Based On Fuzzy Logic
A New Low Cost Cc Pwm Inverter Based On Fuzzy Logic
Novel Multi level Inverter Topology Based on Multi Winding Multi Trapped Transformers for Improved W
Fundamnentals of dosimetry based on absorbed dose standards
A Series Active Power Filter Based on a Sinusoidal Current Controlled Voltage Source Inverter
A Series Active Power Filter Based on Sinusoidal Current Controlled Voltage Source Inverter
Comparative study based on exergy analysis of solar air heater collector using thermal energy storag
Performance Improvements in an arc welding power supply based on resonant inverters (1)
ebook occult The Psychedelic Experience A manual based on the Tibetan Book of the Dead
Network Virus Propagation Model Based on Effects of Removing Time and User Vigilance
Phylogeny of the enterobacteriaceae based on genes encoding elongation factor Tu
Multi Winding Transformer Based Diode Clamped Multi Level Inverter
A Series Active Power Filter Based on Sinusoidal Current Controlled Voltage Source Inverter
Munster B , Prinssen W Acoustic Enhancement Systems – Design Approach And Evaluation Of Room Acoust
PWR A Full Compensating System for General Loads, Based on a Combination of Thyristor Binary Compens
Resolution CM ResCMN(2008)1 on the implementation of the Framework Convention for the Protection of
Kim Control of auditory distance perception based on the auditory parallax model
więcej podobnych podstron