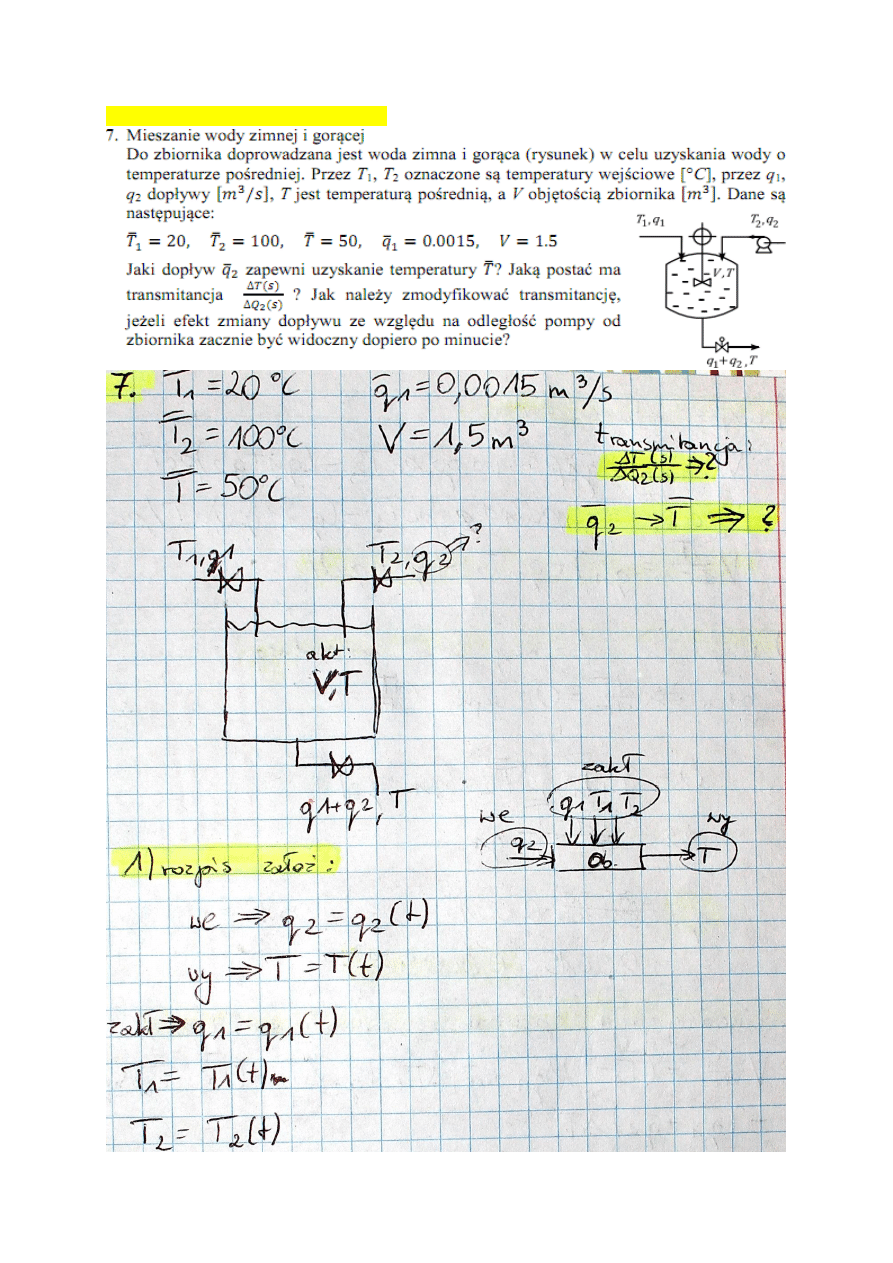
Zad 7. MODELE OBIEKTÓW STEROWANIA:
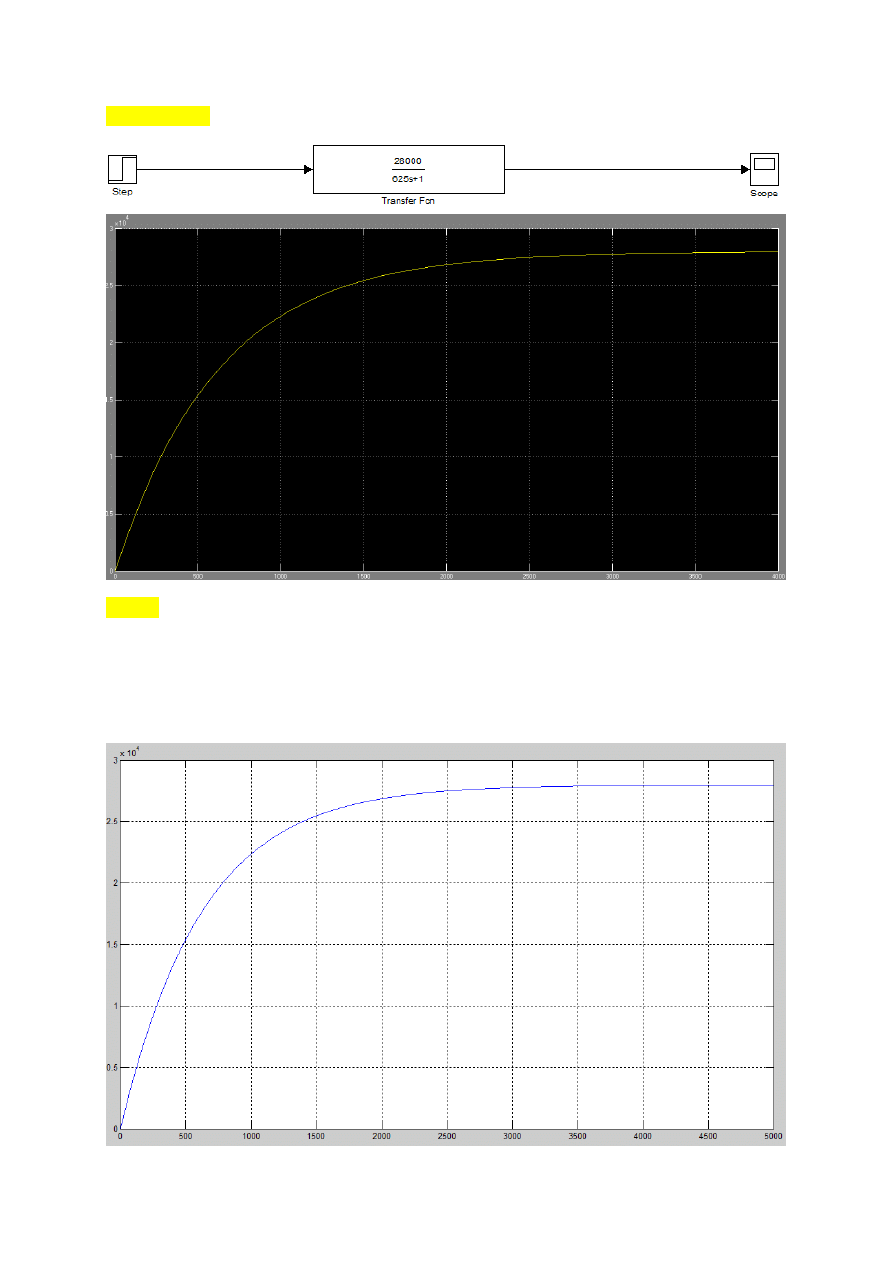
Układ Simulink:
Matlab:
L=28000; M=[625 1];
t=0:2:5000;
y=step(L,M,t);
plot(t,y);grid
Wyszukiwarka
Podobne podstrony:
ROGOZ STANISŁAW EADI2 BEZPIECZNE NAST ZAD6
ROGOZ STANISŁAW EADI2 DYNAMIKA 8 3
ROGOZ STANISŁAW EADI2 IDENTYFIKACJA ZAD6
8 Modele Obiektów i Układu Sterowania
AUTOMATYKA, Liniowe modele obiektów i sposoby ich opisów1, POLITECHNIKA OPOLSKA
ćw 8 Teoria Sterowania modele obiektów sterowania w przestrzeni stanów (rozdział III TS w zadaniach
NiBS 3 Rozklad trojkatny Modele Starzenie obiektow nieodnawianych
17. Modele obliczeniowe konstrukcji obiektĂłw budowlanych, egzamin inz
NiBS 2 Modele Starzenie obiektow nieodnawianych
NiBS 3 Rozklad trojkatny Modele Starzenie obiektow nieodnawianych
39 KP Modele obliczeniowe konstrukcji obiektów budowlanych
Obiekty martyrologii polskiej
R 6 1 Obiektowy model zapytan
Wykład 6 2009 Użytkowanie obiektu
w5b modele oswietlenia
więcej podobnych podstron