
!
"
#
!
$
#
#%##
#
!
"
#
#
#
!
"
#
#
#
&%#
!
$
!
#
!
#
Æ
'
#
#
!
$
#
%#
(
)
#
%#!
#
&%
#
*
+
!
%
#
,
-#
#
-
#
#
#
#!
#
# #
#
,
%
#
#
#
!
,
#'
!
#
#
,
#!
.
,
#!
!
/
#
'
#
#
,
%#
&
!
0#
,
-
!
##
1
2
3
&
!
4
#
,
#
!
"
#
#
#
#
!
Æ
#
!
5
##
#
#
-#
#
!
,
#
#
#
#
6
#
#
,
#
*
!
#
#!
"
7
#
#
,
!
/
#
#
#
8
!
# #
#
#
#
#
!
"
#
#!
#
%#
#Æ!
%#
#
%
##
!
#
-
9
Æ
:
(!)
#
9
9
(!*)
#
&
&
(!&)
#
#
#
#
#
#
9
*
(
:
)
9
*
(
)
(!)
#
##
7%
#
#
#
,
#
#!
/#
,
#
7
#
#
##
!
-
#
9
(!+)
#
#
#
#
##
#!
/
# #
9
:
:
:
(!;)
#
#
!
<
9
:
(!2)
/
#
9
:
(!)
#
!
#
<
9
<
9
9
(!8)
$
#%##
¼
9
<
(!3)
#
(
<
)
(
<
)
9
<
<
<
<
9
(
)
<
9
<
(!)
"
,
#
¼
¼
9
<
<
9
9
(!*)
<
#
:
#
!
$
#
#
9
(
*)
(!&)
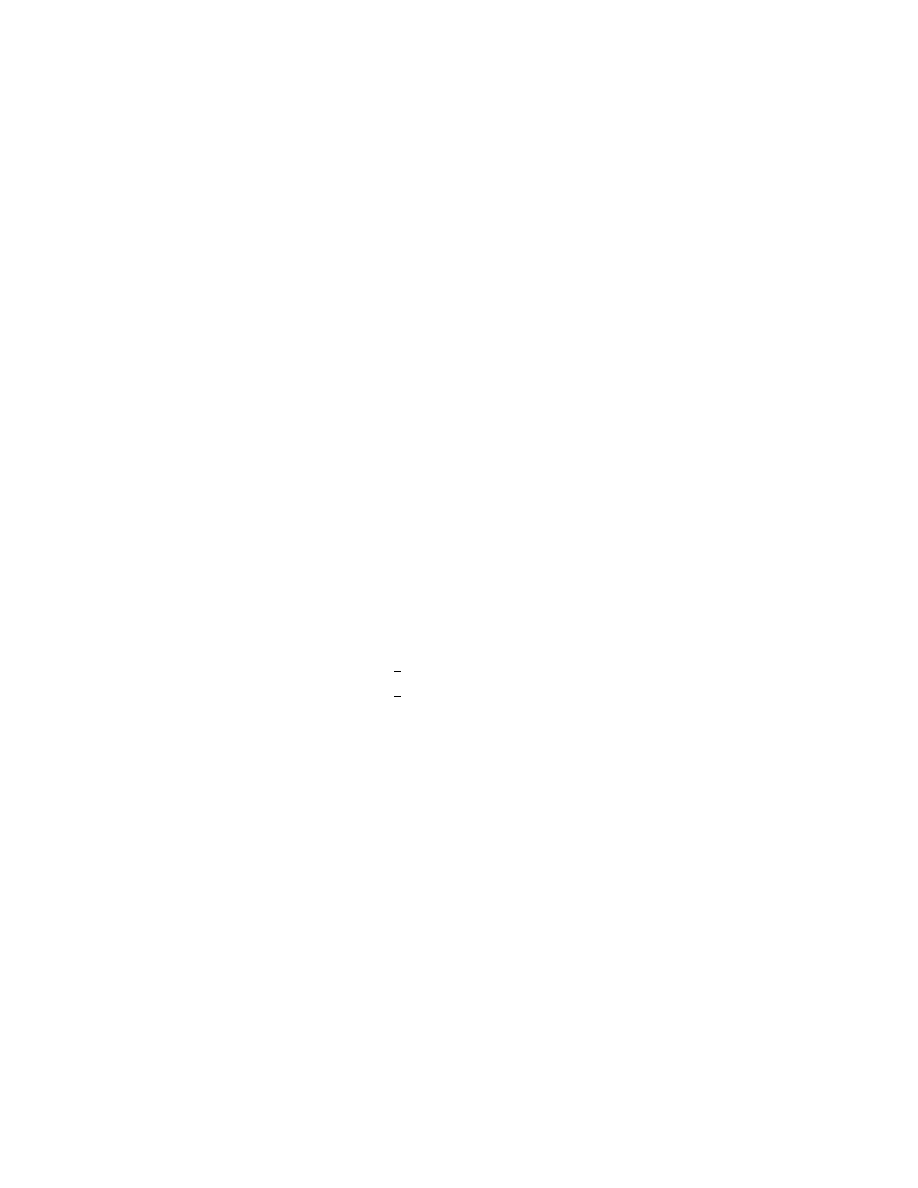
Tangent plane
$
-#
!
"
#
9
(
=
*)
(!)
9
#
=
9
%
!
#
#
!
6
##
#%
%#
!
$
%#
#
!
#
>
#!
!
/
#
%#!
#
(
5
!)!
$
!
(
)
9
(
*)
(
*)
(
*)
(!+)
6
(!;)
#
#%##
!
"
#
#
#
>
7
&%
#
#
-#!
,
!
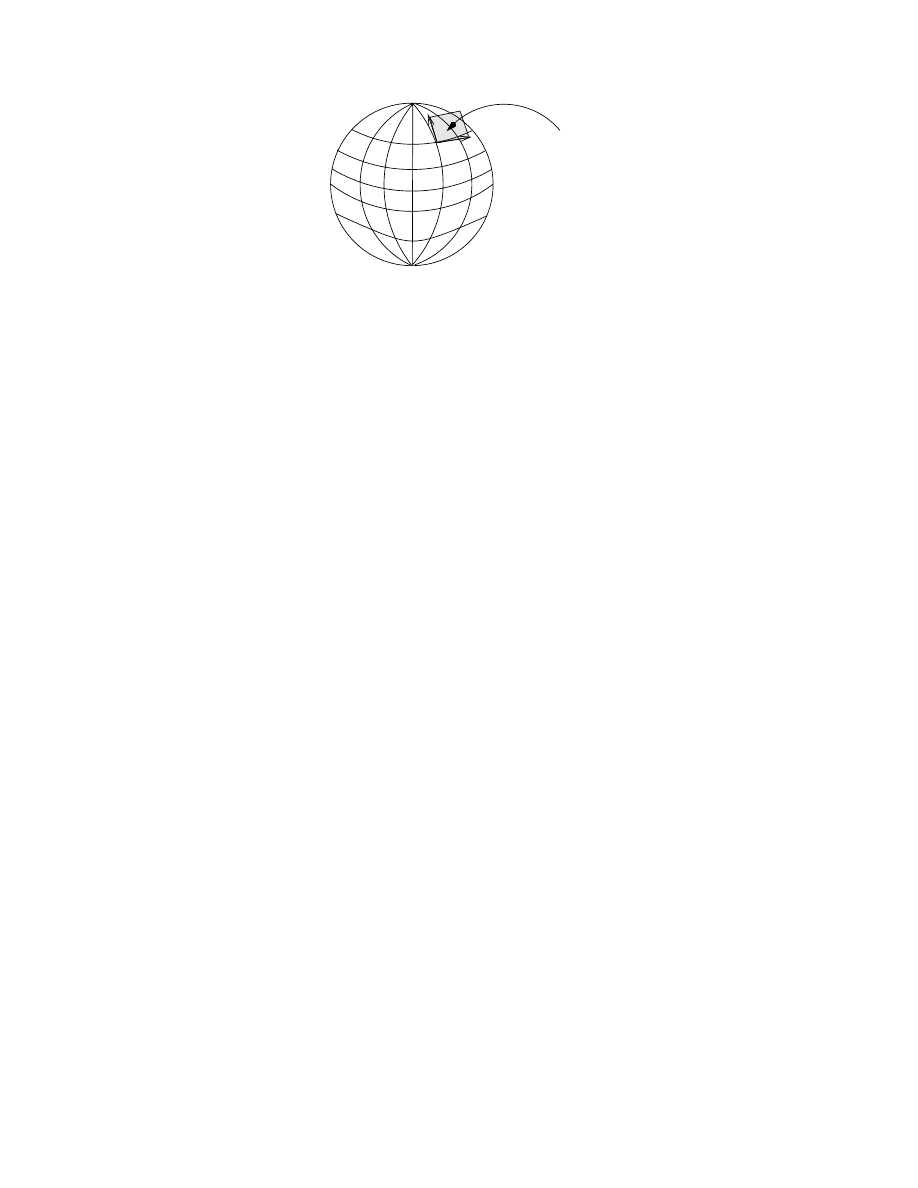
R
R
θ
0
1
!
4
#
#
-#
#%
?
@
,
A
@
-
,
#!
#
<
9
3
(!2)
"
-#
#
B #!
CD
#
#-#
()
9
(
)
(!)
(3)
9
()
9
(!8)
"
-#
(
)
9
<
(!*3)
#-#
(
)
!
"
#
#
!
#
9
(
*)
(!*)
#
!
>
,
(
)!
5
#
#
!
#
#
%#
!
(
)
-#
(
5
!*)!
#
()
9
:
=
(!**)

#
9
=
!
6
,
(
)
9
:
=
9
<
(!*&)
"
()
9
:
(
<
)
(!*)
9
(
)
:
(!*+)
-
()
<
()
9
!
#
9
( *)
(
:
)
(!*;)
,
-#
#
!
6
#
#
#Æ
#
!
4
#
#
-#
!
/
!
5
CD
-!
!
"
#'
#
-
!
##
#
!
#
#!
-#
,
#
!
,
%#
#
-#
!
/
#
,
#!
"
#
%
!
#
#-
#!
#
!
#
%
#
7
!

'
%#
#
!
@
,
%
#
#
#
(
E
)
#
#'
!
%
#
#
#
!
#
#
%
!
@
#
>
!
#
#
!
@
-
#
9
:
(!*2)
!
@
#-
9
(!*)
#
# #
!
"
-
9
(!*8)
%#
!
/
#
F1D
#
#!
,
%
<
9
(!&3)
,
9
(!&)
9
<
#
9
3
#
9
3!
9
<
(!&*)
9
<
9
(!&&)
(!&3)
#
!
"
%
#
#

!
#
#
!
@
#'
!
(
<
)
9
<
9
(!&)
@
9
:
G
G
(!&+)
#
#
#'
(
#'
#)!
@
!
@
#
#
3
9
9
:
G
G
(!&;)
"
G
G
9
(!&2)
6
-
#
#'
!
@
G
G
9
(!&)
@
#
#
(!&+)
-#
9
(!&8)
"
9
9
*(
<
)
(!3)
#
#
%
!
#
!
#
!
6
%#
>
#
#!
#
#
#
%
#
#!
(!3)
,
%
(
<
)
,
#
!
<
#
!
#
%
#
#
#
#
#
%
#
%
!
H
!
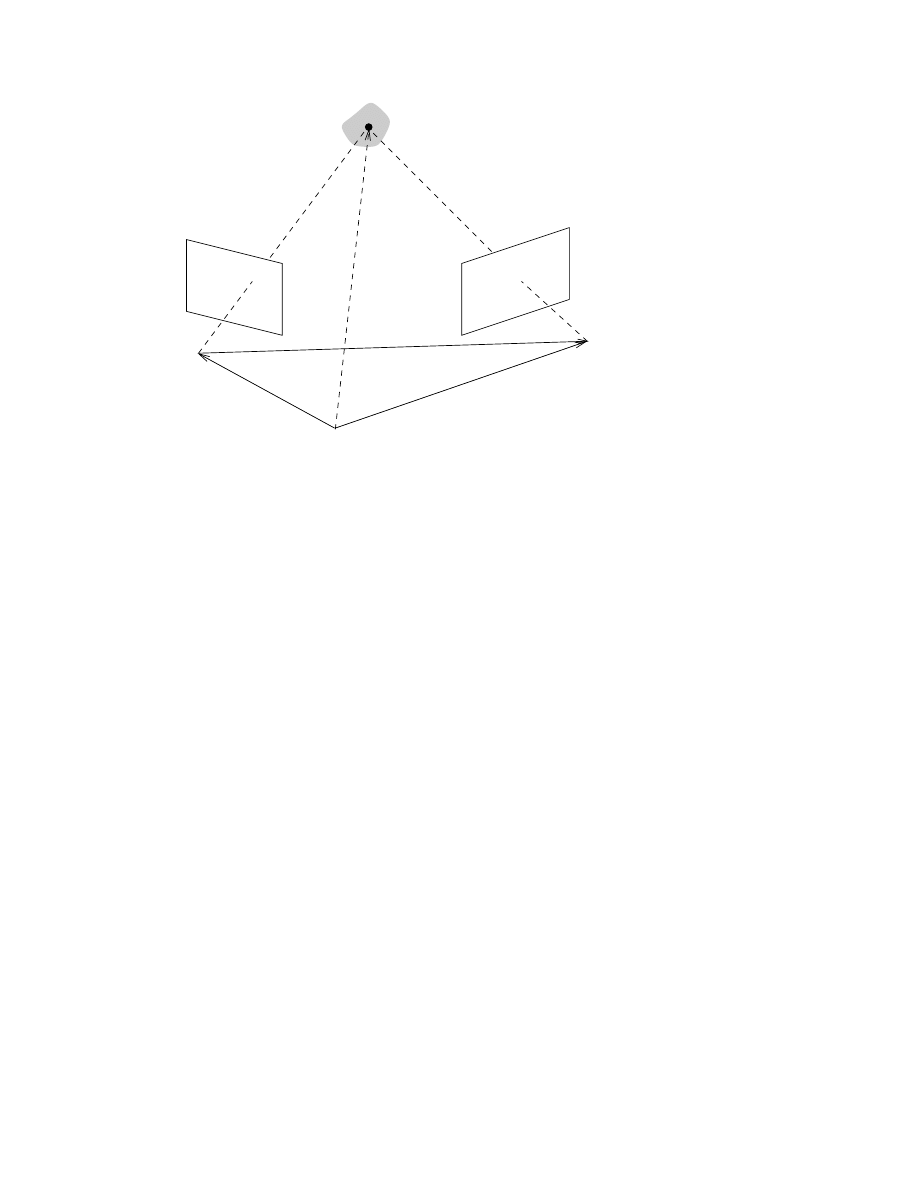
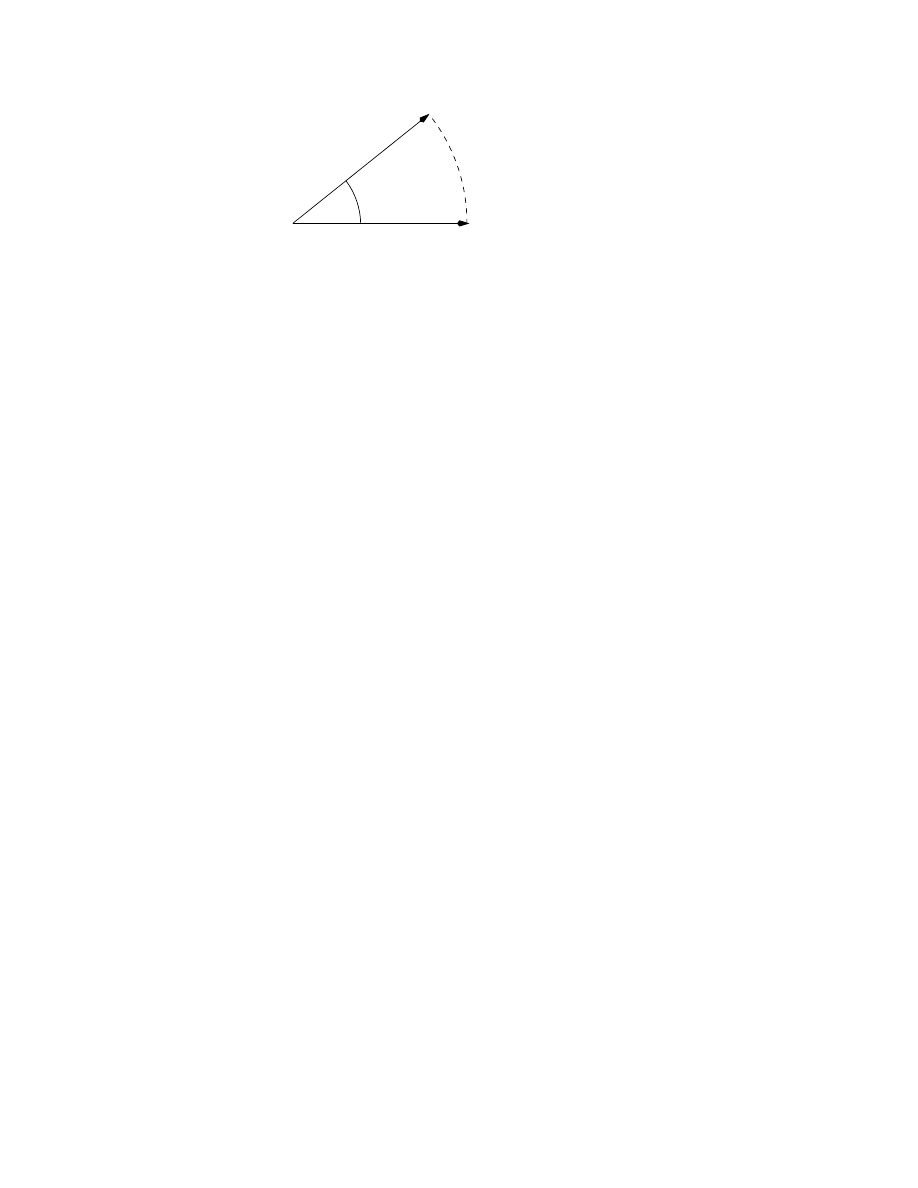
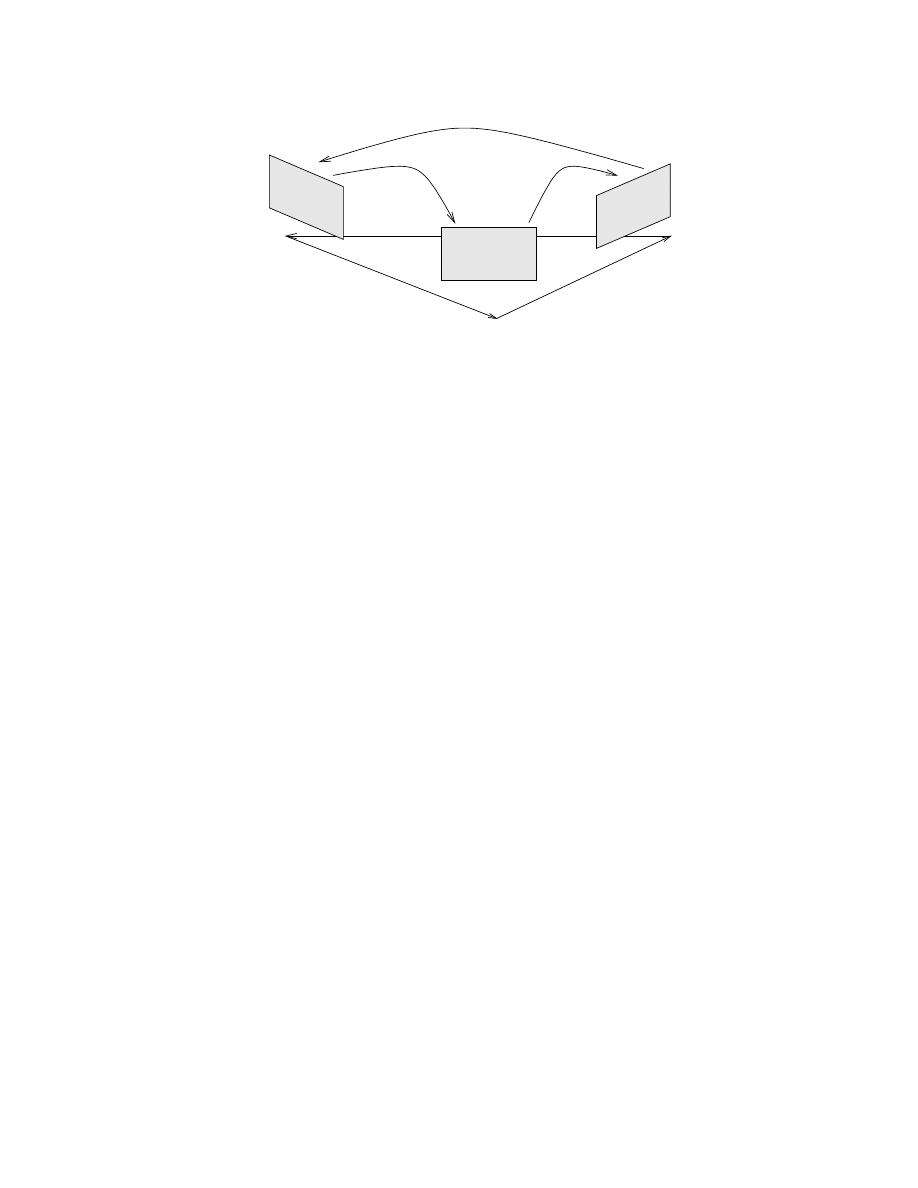
Camera 1
Camera 2
Object
X
t
t
1
2
t
O
"
#
$
%
¾
½
1!
4
#'
!
###
-#
#
%
!
#
,
%#
!
/%
#
#
-#
#
#
!
6
#
7
#
(
4
!;)
-
#
,
!
&%#
#
#
#!
#
6
-#
!
4
,
%#
#
(
)!
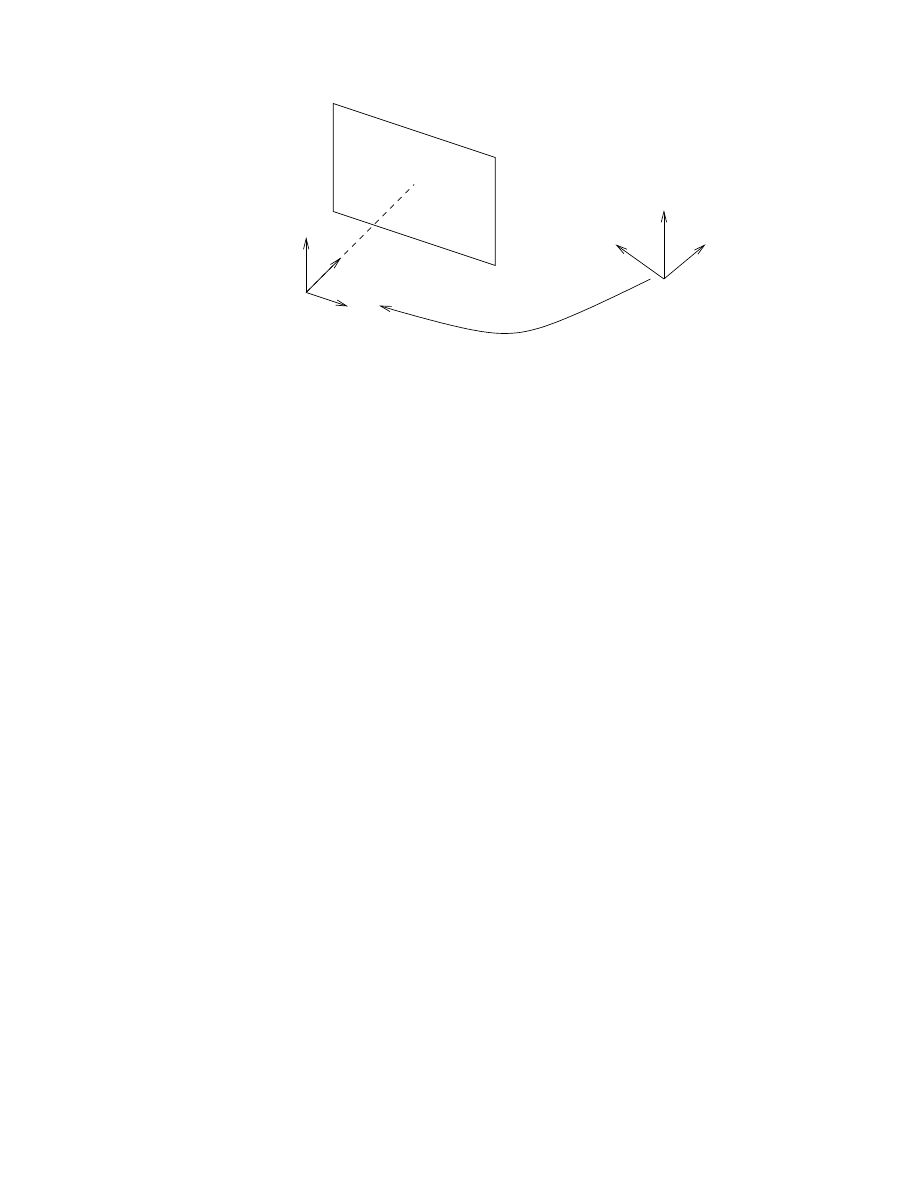
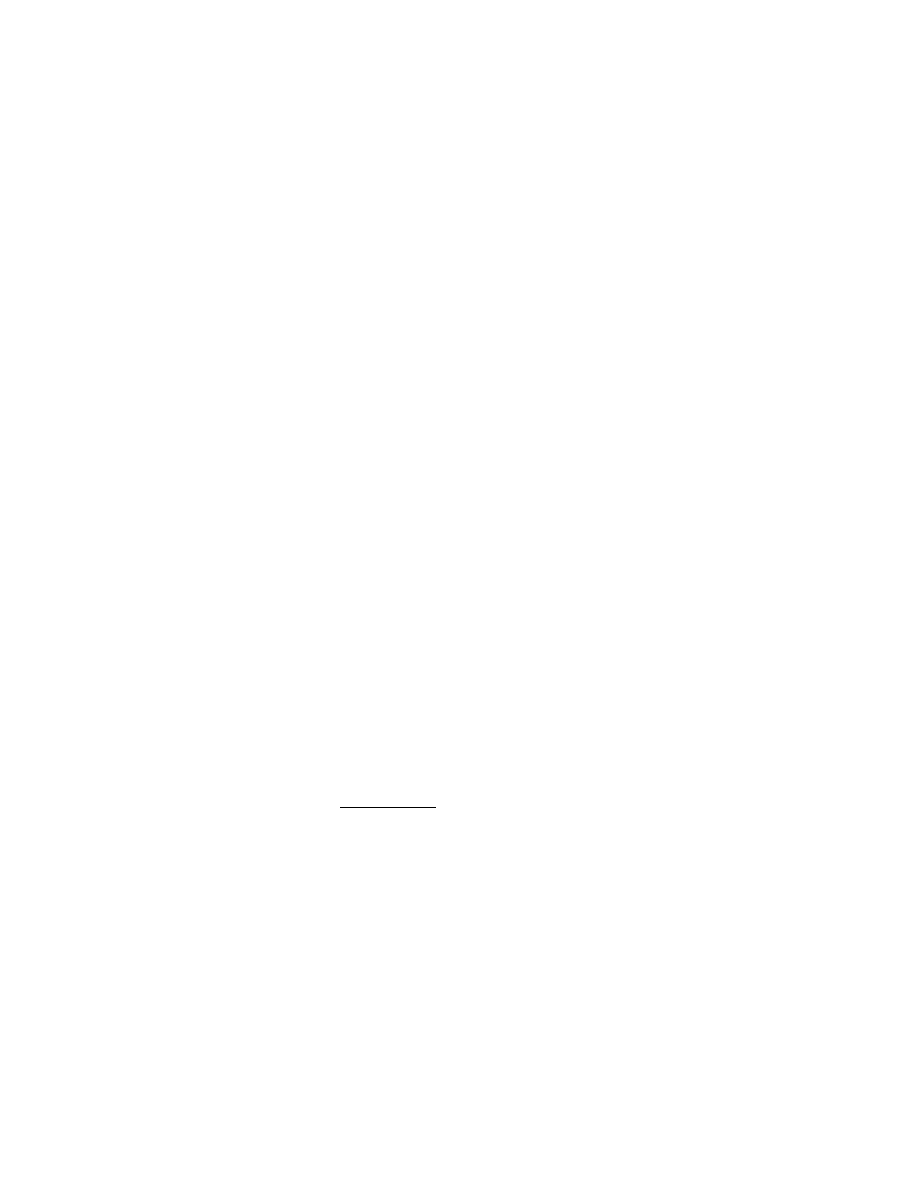
e
3
f
1
f
3
f
2
R
1
e
e
1
Optical
Centre
Camera 1
2
&
"'%
%
(
)
¾
½
!
,
#
##
;
2
!
#
#
#%
#
#
#
#
#
#
6
%
!
$
#
#
#
(
5%
!&)!
#
#
F
#
!
@
##
#
#
!
/
,
#
#
!
"
#
#
#
#
9
(
)
(!)
9
(
)
(!*)
@
#
#
#
9
<
9
<
(!&)
(4
5
!)!
#
,
#
,
#
%
!
#
,
>
#
#
#
!
"
#
#
#
#
!
@
#-
9
9
(!)
#
#
9
<
:
9
<
:
(!+)
!
@
#
%
7
#
#
(
#
#)
%
#
'!
@
##
#
#
!
-
#
!
#
%
#
#
!
#
6
,
(
##)
!
#
!
#
#
( #
)
(
%
)
(
)
*
(
)
(!;)
(
)
*
(
)
(!2)
#
(
)
*
(
<
:
)
(!)
#
!
7
#
(
)
*
(
<
:
)
:
(
<
:
)
(!8)
6
D
*
(
)
9
(
)
(
)
(
)
(
)
(
)
(!+3)

#
#
!
-
(
)
#
#
B
,
#
##
%
#!
"
,
#
#
#
!
@
6
D
#
(
)
(
)
(!+)
!
#
#
#!
#
#
#
#
(
)
!
!
!
(
)
(!+*)
#
(
)
:
(
)
9
*
*
(
:
)
:
*
(
)
(!+&)
/
(
)
*
(
<
<
:
)
(!+)
I
#
#'
"
9
(
<
<
:
)
(!++)
##
;
2
!
-
"
(!++)
#
# #
!
!
"
"
#
9
J
<
J
<
(!+;)
J
9
J
9
(!+2)
#'
#
#
#
# #
!
K
#
,
"
"
"
9
(
J
)
<
(
J
)
<
(!+)
# #
#
"
¼
9
(
J
)
<
(
J
)
<
(!+8)
<
#!
#
#'
"
¼
!
0
(!3)
(
(
J
)
<
)
(
(
J
)
<
)
9
3
(!;3)
,
#
#
9
3
(!;)
9
(
J
)
(
<
(
J
)
<
)
(!;*)
#
%
#
##
!
!
#!
"#
#
(!8)
!
%
(
)
9
:
(
)
(!;&)
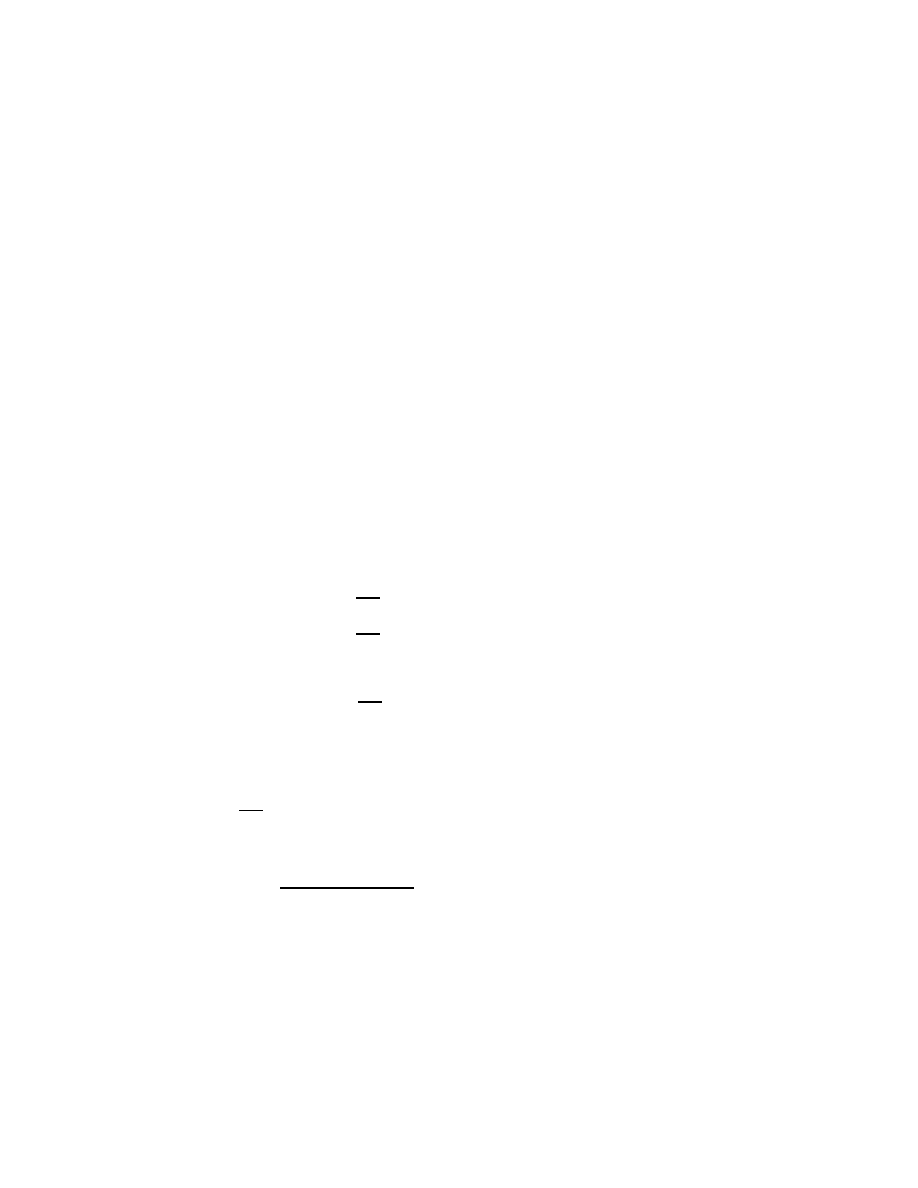
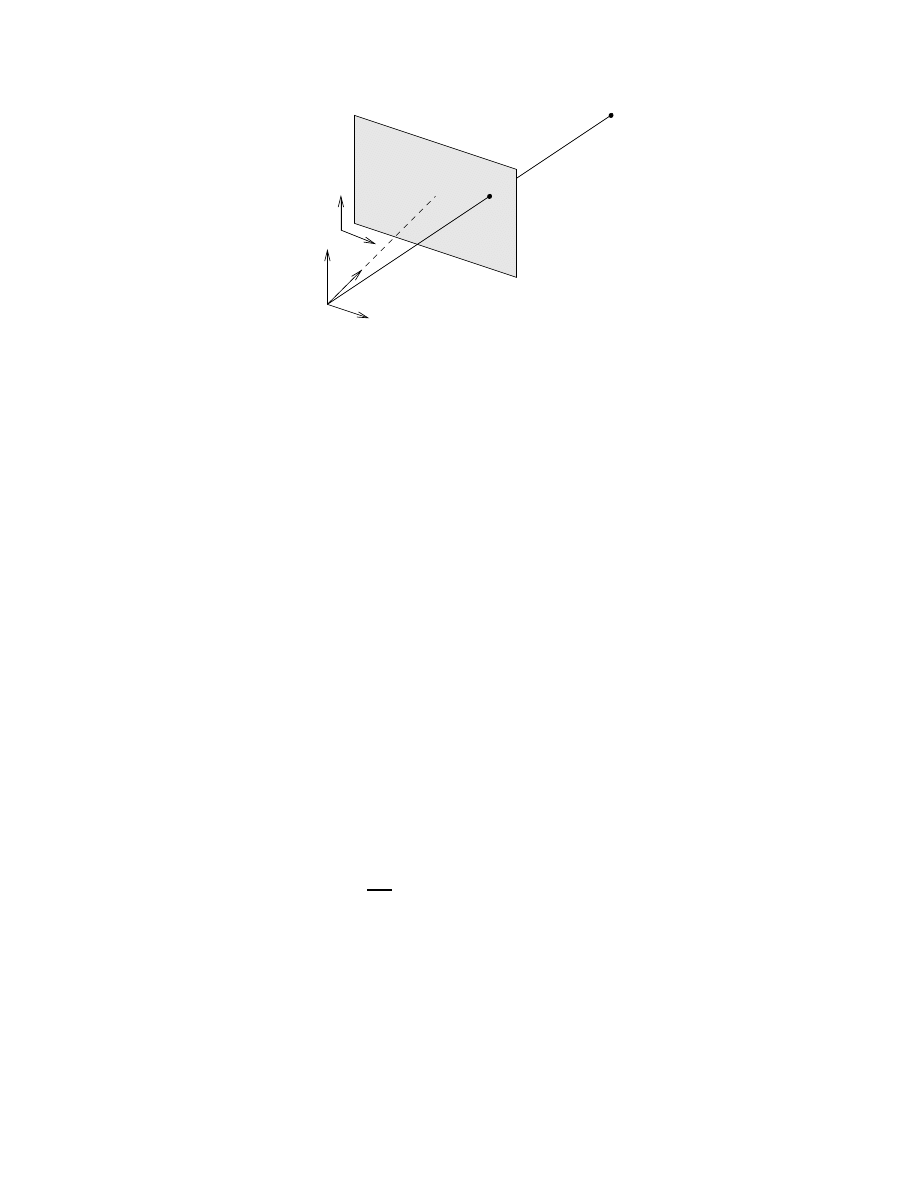
R
12
R
23
t
31
t
23
t
12
Camera 1
Camera 2
Camera 3
R
31
*
½¾
!
¾¿
!
¿½
¿½
¾¿
½¾
(
)*
#'
"
9
(
<
<
:
)
(!;)
#
!
#
#
# #
,
#
!
I
"
9
J
<
J
<
(!;+)
/
:
:
-#!
4
"
"
9
(
J
)
<
(
J
)
<
(!;;)
!
/
#
!
#
(5
!+)!
#
(
J
)
<
(
J
)
<
:
(
J
)
<
9
3
(!;2)
#
(
J
)
<
(
J
)
<
:
(
J
)
<
9
3
(!;)
-
7
-
#
!
/
#
!
#
*%
#
#
%
# !
$
%
%
&
# #
*
# #
!
#
%
#
#
"
(!;;)!
-#
##
#
#
!
"
#
#
#
#
!
"#
#
(
5
!;)!
#
#
(
)
#
!
/#
7
#
#
(
)
!
#
#
9
(#
#
)
#
#
&
&
#
9
(
)
9
#
(!;8)
(4
8
#)!
##
,
!
5
7
(
)
#
!
5
*%
5
!&
#
L
9
(
)
(
)
$
9
*
(!23)
/
#
#
#
#
,
#
#
!
#
!
"#
#'
#
1
e
3
e
e
Optical
Centre
Camera 1
2
x
X
v
u
f
+
'
%
,
#!
,
#
%
#
,
#
Æ
!
#
!
-#
#
#
#
#
'
#
,
#
-#
!
E
#
#
#-#
#
#
!
#'
##
#
#
#
3
!
"
%
##
#%
7-
#
#
#
-#
#
!
I
#
!
#
#
#
#
!
#
(!8)!
#
!
/
*%
7
#
#
,
#
!
@
#
(
%
%
)
*
(
%
<
%
<
:
)
(!2)
$
#
%
%
,
(
#
)
#
#
#
#
#
9
:
(!2*)
,
%
#
%
!
H
,
-
-
,
!
#
##
7-#
#
%
#
!
9
½
½
!%
!%
(%
%
:
)
(!2&)
9
<
#
9
!
#
!
:
*
9
&
(!2)
%
#
&
!
5
(!2&)
9
(!2+)
#
9
(!2;)
"
#
9
(
)
9
(
)
(!22)
#
9
(
)
(!2)
H
9
(
)
(
)
:
(
)
*
9
(
)
(
)
9
(
)
(!28)
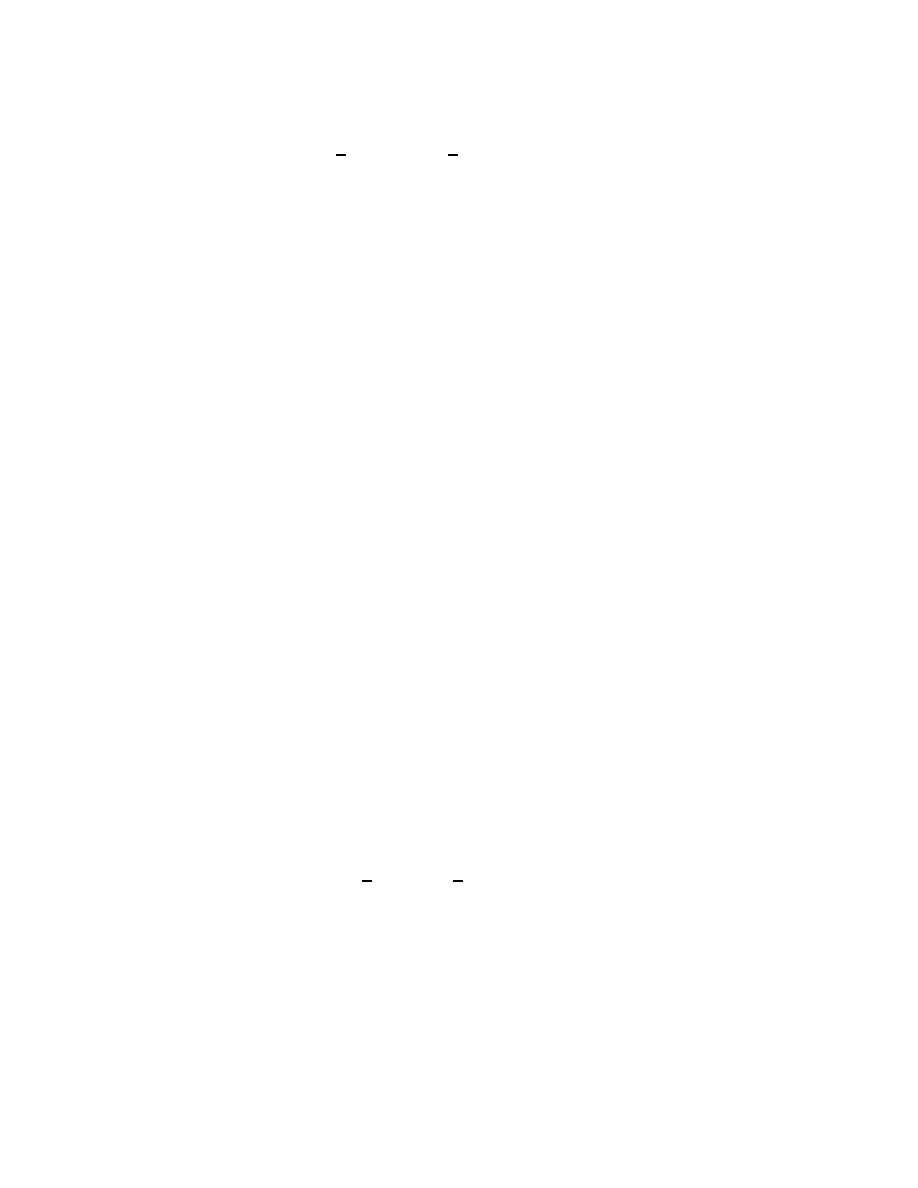
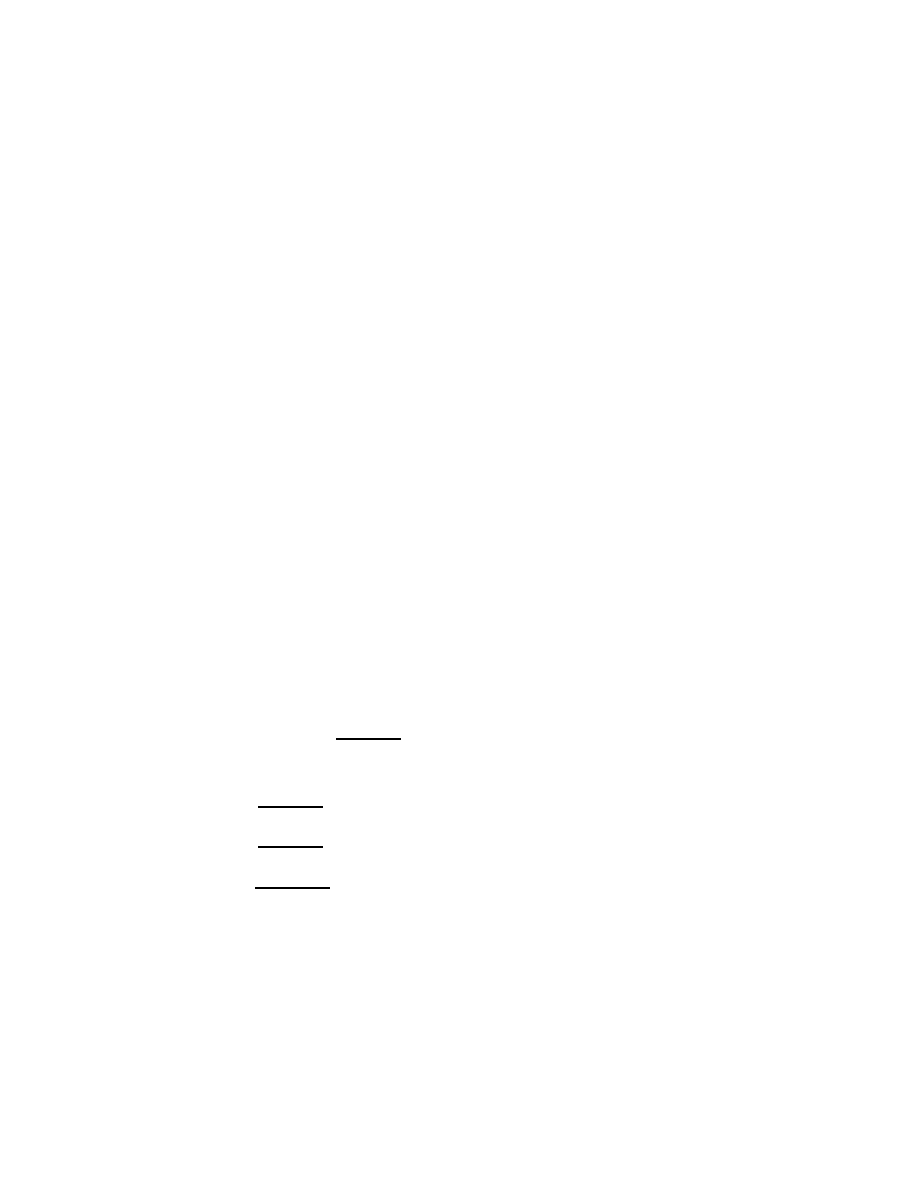
t -t
1
2
R
12
Line Distance
Camera 1
Camera 2
-
%
'
(
!
!
!
/
#
(!2)
#
-
(
)
%,
#
"
9
(
)
(
<
)
(
<
)
(
<
)
(
<
)
(!3)
#
!
/
(
)
#
#
!
(!3)
#
7
(
5%
!2)!
7
##
!
#
#%
(
)
#
!
#
#!
(!3)
#
!
/
#
#
9
3!
#
#

#
(
)
9
(!)
#
#
#
F
%
"
9
(
)
(
)
(!*)
9
(
<
)
(
<
)
(
<
)
(
<
)
(!&)
-
"
(!*)
#
9
#
9
(!)
@
#-
()
9
(!+)
#
#
!
9
()
9
(
)
9
"
(!;)
4
"
#
%
!
/
#
#
!
#
&%
!
K
#
#
#
#
-#
!
!
"#
6
#
#
&
!
/
,
%,
#

(!3)
#
!
"%
F
#
"
9
(
)
:
(
)
:
(
)
(
)
:
(
)
:
(
)
)
(!2)
9
(
<
)
(
<
)
(
<
)
(
<
)
!
(!)
@
# #
!
,
#
(
)
(
)
9
(*
)
(!8)
(
)
(
)
9
(*
)
(!83)
"
9
*
9
*
(!8)
;
;
:
*
*
:
9
&
(!8*)
()
9
!
(!8&)
/
*
"
!
#
-#
;
;
!
K
#
!
$
/
#
#!
M
#
#

#
!
$%
#
#
-#
#
,
#!
/
##
#
#
&%#!
1
#
#!
%
#
6
!
#
##
-#
!
I
,
#
!
'
##
%
#
-
!
4
#
#!
.
##
!
"
##
#
,
'
#
!
@
,
#
#
6
#
#
#!
%
L.
,
#
E4$
L!
N!
/
!4!
H
#
4!.!
6!
F
-
&%.
!
8;8O233
82!
* P!5!
L
!
!
/#
F#!
F#
8!
& L!
P!
F!
.!
!
.
L
#
0
88!
L!P!F!
.
/!K!
F
4!5!
#
P!
F
!
F
!
"
@!E!
6
#
!
"
;+O*&;!
6,
6
88;!
+ .!
H
#
!
4 1,!
!
$#
.#
8!
; 6!N!
!
H!
L#%
!
#
$
%
;*8O;*
82!
2
!4!
H
#
/!K!
K
!
I
#
#
/
!
&
*(*)*+*O*;
88!

P!
F
@!P!
51#
/!F!
F
#
L!P!F!
.!
K
#
/
#
!
#
'
*;(&)8
88!
8 P!
F
#
/!
4
!
0
%
!
"
E!
6
#
!
4 1,
#
(
&
)
&
!
6,
*333!
3 P!
#
Q!
!
E
#
%
#
/
,
!
#
'
*(&)**&O*&
88!
6!
4
#
P!N!
/
!
E
/
!
'
(
*
+(&)&38O
&*
88!
* .!4!
4!
+
&
,
!
#
0
88;!
& P!
@
!4!
H
#
K!
/
7!
I
#
/
#
%
!
(+)+O2;
88!
R!
R!
.
#
/
!
#
'
*2(*);O8+
88!
Wyszukiwarka
Podobne podstrony:
Doran Grassmann Mechanics Multivector Derivatives & GA (1992) [sharethefiles com]
Gull & Doran Multilinear Repres of Rotation Groups within GA (1997) [sharethefiles com]
Doran et al Conformal Geometry, Euclidean Space & GA (2002) [sharethefiles com]
Doran & Lasenby GA Application Studies (2001) [sharethefiles com]
Doran Geometric Algebra & Computer Vision [sharethefiles com]
Doran & Lasenby PHYSICAL APPLICATIONS OF geometrical algebra [sharethefiles com]
Sobczyk Simplicial Calculus with GA [sharethefiles com]
Lasenby GA a Framework 4 Computing Invariants in Computer Vision (1996) [sharethefiles com]
Heckerman Tutorial On Learning Bayesian Networks (1995) [sharethefiles com]
Dorst & Mann GA a Comp Framework 2 [sharethefiles com]
Dorst & Mann GA a Comp Framework 3 [sharethefiles com]
Jay An Introduction to Categories in Computing [sharethefiles com]
Lasenby Grassmann Calculus Pseudoclassical Mechanics & GA (1993) [sharethefiles com]
Dorst & Mann GA a Comp Framework 1 [sharethefiles com]
An Introduction to Statistical Inference and Data Analysis M Trosset (2001) WW
Wykład 5 An wsk cz II
An%20Analysis%20of%20the%20Data%20Obtained%20from%20Ventil
więcej podobnych podstron