Controller
KR C4 Quick Start
Pierwsze kroki
KUKA Roboter GmbH
Stan na: 16.08.2012
Wersja: KR C4 Quick Start V4 pl (PDF)

KR C4 Quick Start
Stan na: 16.08.2012 Wersja: KR C4 Quick Start V4 pl (PDF)
© Copyright 2012
KUKA Roboter GmbH
Zugspitzstraße 140
D-86165 Augsburg
Niemcy
Niniejsza dokumentacja może być powielana i udostępniana osobom trzecim – także we fragmen-
tach – wyłącznie za jednoznaczną zgodą KUKA Roboter GmbH.
Układ sterowania może posiadać dalsze, nie opisane w niniejszej dokumentacji funkcje. Przy dosta-
wie nowego układu sterowania i/lub w przypadku serwisowym klient nie ma jednak prawa żądać udo-
stępnienia mu tych funkcji.
Treść publikacji została sprawdzona pod względem zgodności z opisanym osprzętem i oprogramo-
waniem. Mimo to nie jest możliwe całkowite wykluczenie różnic, w związku z czym nie gwarantujemy
całkowitej zgodności dokumentacji ze stanem faktycznym. Informacje zawarte w niniejszej publikacji
są jednak regularnie sprawdzane, a wymagane poprawki są uwzględniane w kolejnych wydaniach.
Zmiany techniczne nie mające wpływu na działanie zastrzeżone.
Przekład: dokumentacja w oryginale
KIM-PS5-DOC
Publication:
Pub KR C4 Quick Start pl
Bookstructure:
KR C4 Quick Start V3.1
Wersja:
KR C4 Quick Start V4 pl (PDF)

Stan na: 16.08.2012 Wersja: KR C4 Quick Start V4 pl (PDF)
Spis treści
Pierwsze i ponowne uruchamianie ............................................................
5
Konfiguracja za pomocą WorkVisual .........................................................................
5
Pierwsze kroki ............................................................................................................
5
Spis treści

Stan na: 16.08.2012 Wersja: KR C4 Quick Start V4 pl (PDF)
1 Pierwsze i ponowne uruchamianie
1
Pierwsze i ponowne uruchamianie
1.1
Konfiguracja za pomocą WorkVisual
W przypadku zastosowania WorkVisual oraz oprogramowania systemowego
KUKA (KSS) lub VW (VSS) należy pamiętać, aby zawsze stosować wersje
kompatybilne.
Projekty tworzone za pomocą wersji starszych niż KUKA.WorkVisual V2.2
przed uaktywnieniem w układzie sterowania z oprogramowaniem systemo-
wym KUKA lub VW V8.2.14 (lub wersja wyższa) muszą zostać ponownie
wgrane za pomocą KUKA.WorkVisual V2.2 (lub wersja wyższa). Tego sposo-
bu postępowania należy także przestrzegać podczas odzyskiwania lub pobie-
rania starych archiwów.
1.2
Pierwsze kroki
Opis
Podczas pierwszego włączania KR C4 z podłączoną kinematyką trzeba ko-
niecznie uwzględnić przedstawione poniżej sposoby postępowania.
Nie zastępują one pełnej procedury pierwszego uruchomienia systemu robo-
ta!
Sposób postępo-
wania
Do konfiguracji oprogramowania systemo-
wego KUKA lub VW V8.2.14 (lub wersja
wyższa) należy bezwzględnie stosować KUKA.WorkVisual V2.2 (lub wersję
wyższą).
Jeśli projekty są wgrywane z zastosowaniem wersji wcześniejszych, niż-
szych niż KUKA.WorkVisual V2.2 do układu sterowania z oprogramowaniem
systemowym KUKA lub VW V8.2.14 (lub wersja wyższa), nie można zapew-
nić sprawności działania układu sterowania.
Przy zastosowaniu wcześniejszych wersji oprogramowania systemo-
wego KUKA lub VW (starszego niż wersja V8.2.14) ze względu na
późniejszą zdolność do aktualizacji koniecznie zaleca się przejście
na WorkVisual V2.2 (lub wersję wyższą). Otworzenie starszych projektów w
WorkVisual umożliwia ich automatyczną konwersję do aktualnej wersji.
Szczegółowe informacje na temat pełnej procedury pierwszego uru-
chomienia robota przemysłowego są opisane w rozdziale „Pierwsze i
ponowne uruchomienie” w następujących dokumentach:
Instrukcja obsługi lub instrukcja montażu robota
Instrukcja obsługi lub instrukcja montażu układu sterowania robota
Instrukcja obsługi i programowania oprogramowania systemowego
KUKA
Instrukcja obsługi lub instrukcja montażu opcji
Usunąć zabezpieczenia przed rozładowaniem akumulatora
Układ sterowania robota dostarczany jest z wyciągniętą wtyczką
X305 z CCU, aby uniknąć rozładowania akumulatorów przed pierw-
szym uruchomieniem.
Przed włączeniem należy podłączyć wtyczkę X305 do CCU.
Stan na: 16.08.2012 Wersja: KR C4 Quick Start V4 pl (PDF)
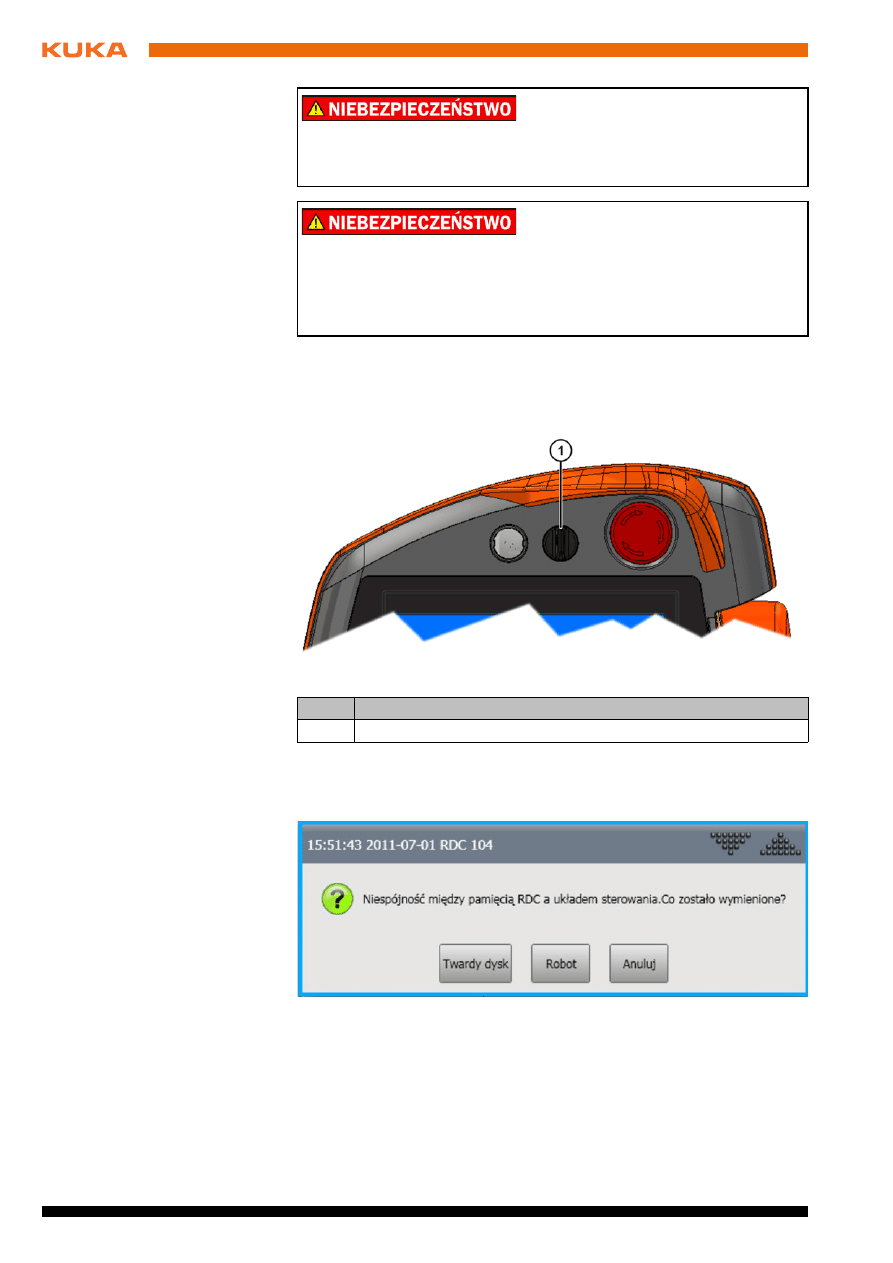
1. Włączyć KR C4.
2. Wybrać tryb roboczy T1.
3. Przełącznik kluczykowy (
>>>
Rys. 1-1 ) ustawić w pozycji Praca (symbol:
otwartej kłódki).
4. Pojawia się następujące zapytanie: Niespójność między pamięcią RDC
a układem sterowania.Co zostało wymienione? (
>>>
Potwierdzić przyciskiem Robot.
5. Pojawia się następujący komunikat: Przywrócono konfigurację sieci.
Potwierdzić naciskając OK.
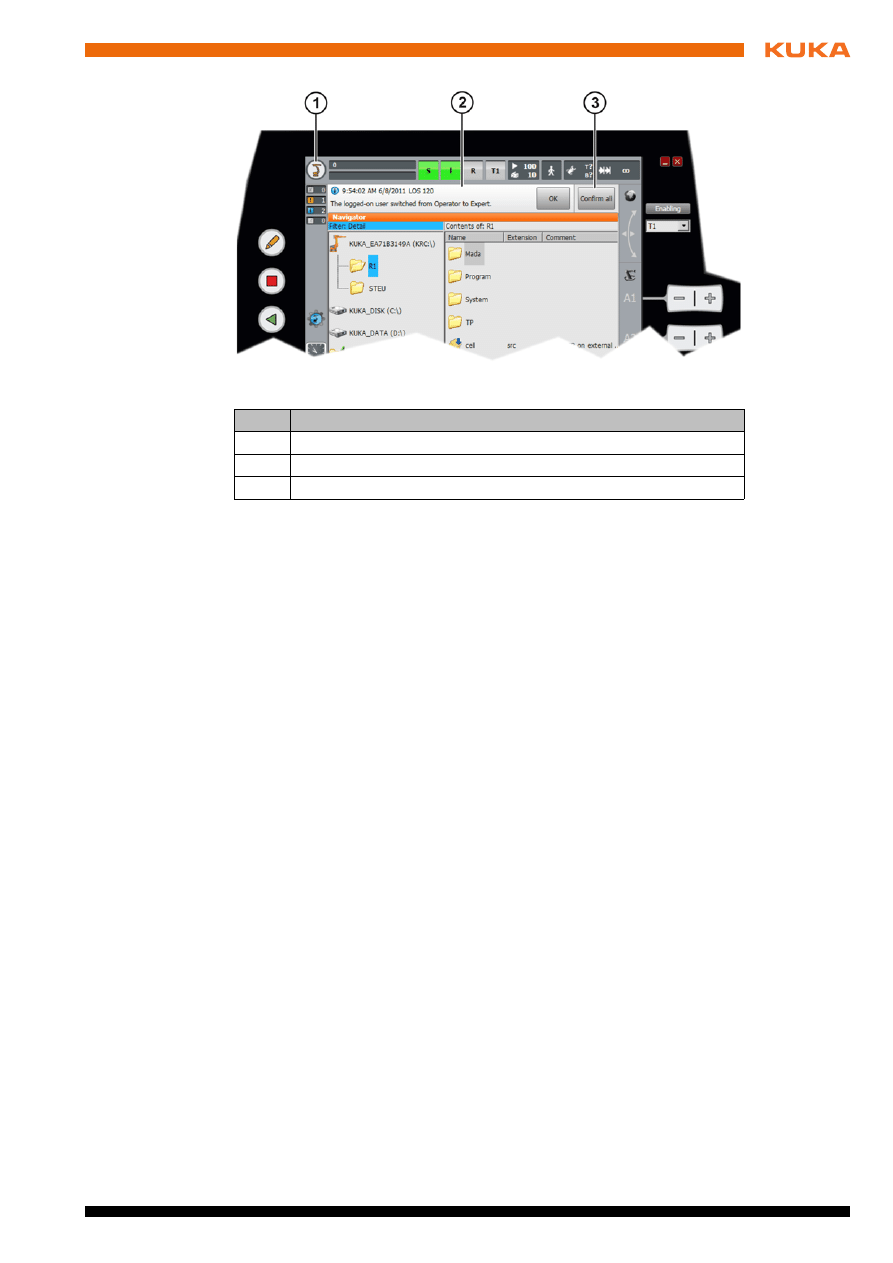
6. W oknie komunikatów potwierdzić wszystkie komunikaty, które można za-
twierdzić, używając przycisku Wszystkie OK. (
>>>
Bez sprawnie działających urządzeń za-
bezpieczających i ochronnych układ robo-
ta może spowodować szkody osobowe i materialne. Przy zdemontowanych
lub wyłączonych urządzeniach zabezpieczających lub ochronnych nie wolno
korzystać z układu robota.
Przy zastosowaniu trybu uruchamiania wy-
łączone są wszystkie zewnętrzne urządze-
nia zabezpieczające. Personel serwisowy powinien zatroszczyć się o to, aby
po wyłączeniu urządzeń zabezpieczających w strefie zagrożenia manipula-
tora i w jej pobliżu nie było nikogo.
Nieprzestrzeganie tego ostrzeżenia może być przyczyną śmierci, poważ-
nych obrażeń lub szkód materialnych.
Rys. 1-1: Przełącznik kluczykowy
Poz.
Opis
1
Przełącznik kluczykowy
Rys. 1-2: Niespójność między pamięcią RDC a układem sterowania
Stan na: 16.08.2012 Wersja: KR C4 Quick Start V4 pl (PDF)
1 Pierwsze i ponowne uruchamianie
7. Nie można jeszcze potwierdzić następujących komunikatów:
KSS15068 Nie zgadza się suma kontrolna konfiguracji zabezpieczeń.
KSS12017 Nie potwierdzono ochrony użytkownika
KSS00404 Zatrzymanie bezpieczeństwa
Aby było to możliwe, trzeba dostosować konfigurację zabezpieczeń mię-
dzy robotem (RDC) a układem sterowania robota:
Nacisnąć przycisk menu głównego i wybrać kolejno punkty Konfiguracja
> Grupa użytkowników. Następnie nacisnąć Zaloguj….
8. Zaznaczyć żądaną grupę użytkowników Konserwator odp. za bezpiecz-
ne działanie. W przypadku zastosowania KUKA.SafeOperation zazna-
czyć grupę użytkowników Technik odpowiedzialny za bezpieczny
rozruch.
9. Wprowadzić hasło (domyślne: kuka) i potwierdzić naciskając Zaloguj.
10. Potwierdzić komunikaty KSS15068 i KSS00404:
Nacisnąć przycisk menu głównego i wybrać kolejno punkty Konfigu-
racja > Konfiguracja zabezpieczeń.
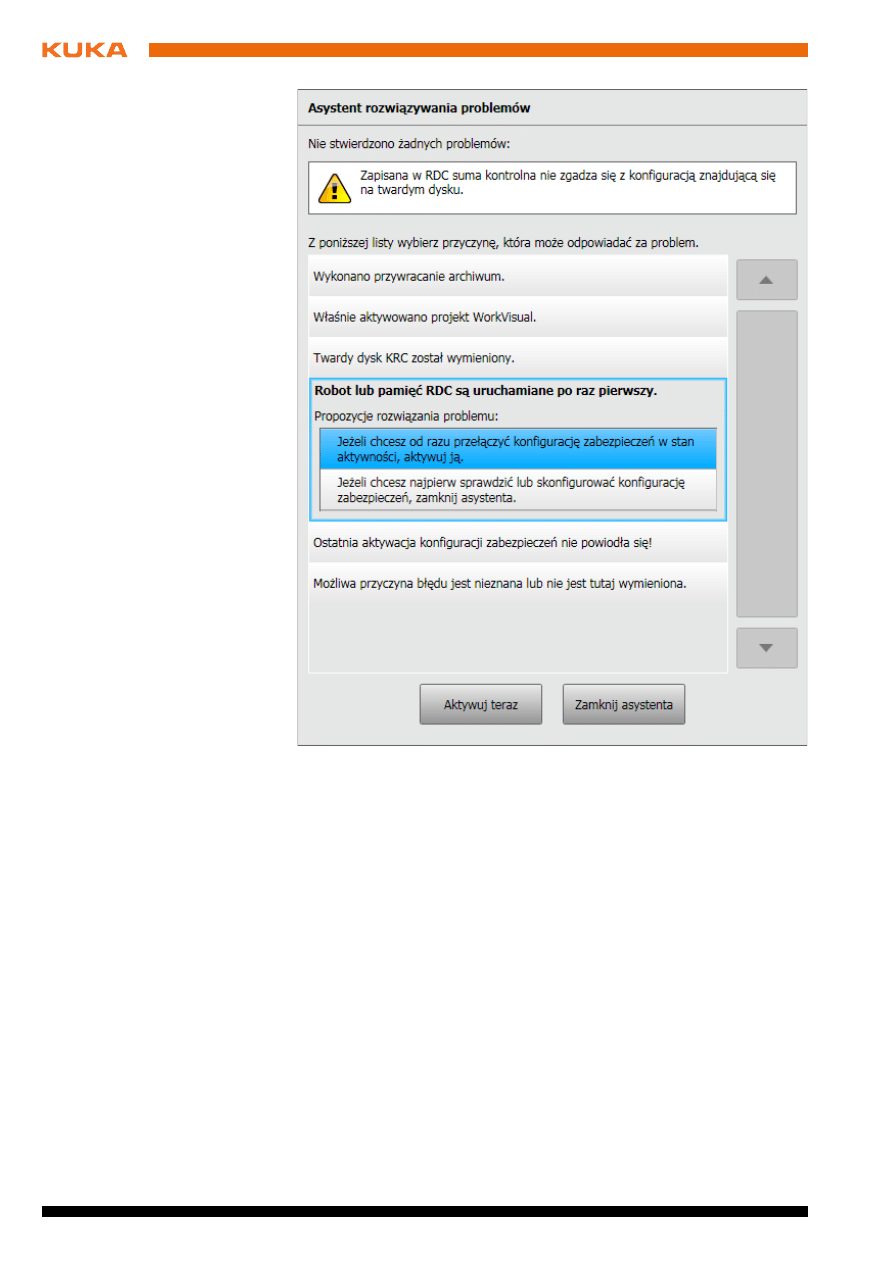
W oknie Asystent rozwiązywania problemów wyświetlane jest ze-
stawienie możliwych przyczyn błędu. (
>>>
Rys. 1-4 )
Zaznaczyć na liście następującą pozycję: Robot lub pamięć RDC są
uruchamiane po raz pierwszy.
Rys. 1-3: Okno komunikatów
Poz.
Opis
1
Przycisk menu głównego
2
Okno komunikatów
3
Przycisk Wszystkie OK (Confirm all)
Stan na: 16.08.2012 Wersja: KR C4 Quick Start V4 pl (PDF)
Pod zaznaczoną pozycją wyświetlone zostaną propozycje usunięcia
usterki.
Tutaj zaznaczyć następującą pozycję: Jeżeli chcesz od razu przełą-
czyć konfigurację zabezpieczeń w stan aktywności, aktywuj ją.
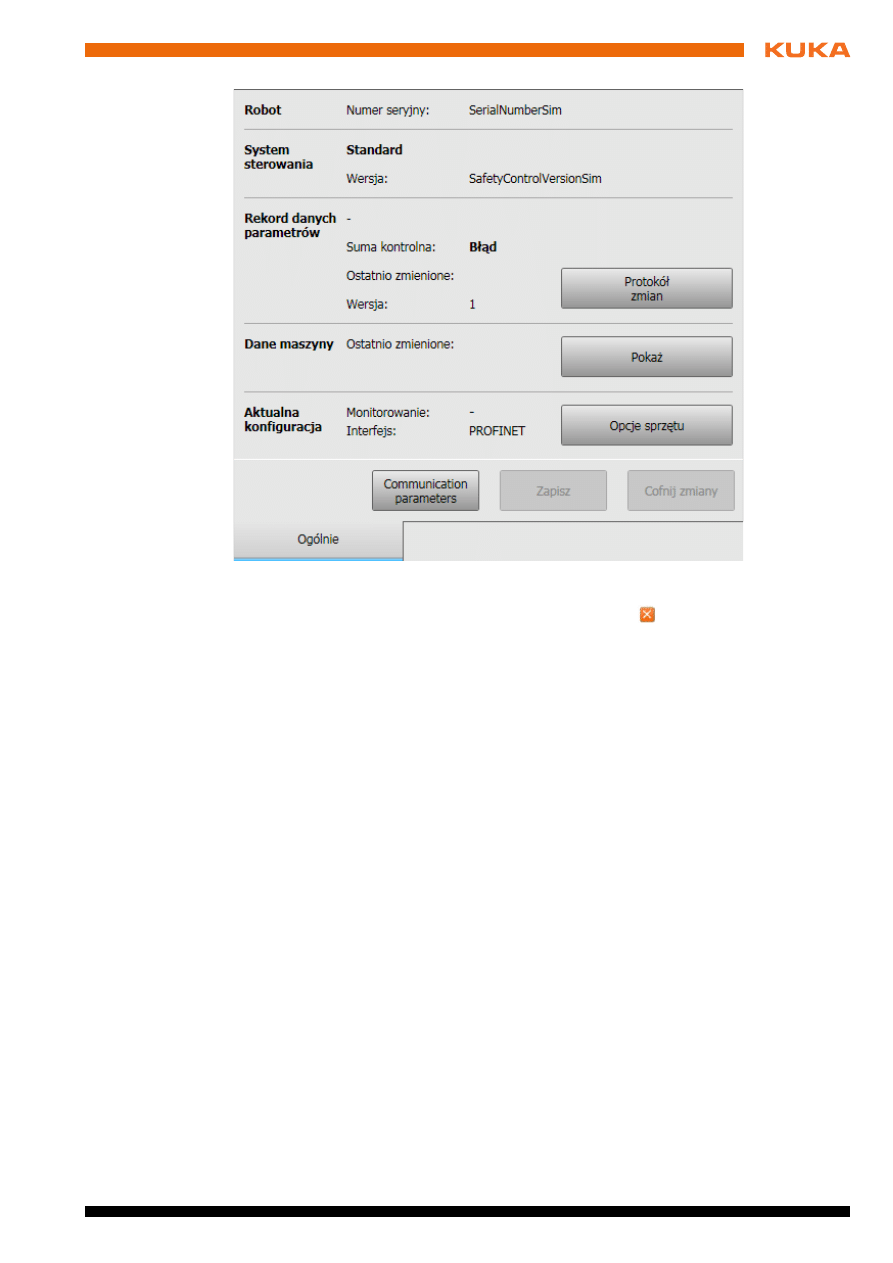
Nacisnąć przycisk Aktywuj teraz. Otwiera się okno Ogólnie.
(
>>>
Rys. 1-4: Asystent rozwiązywania problemów
Stan na: 16.08.2012 Wersja: KR C4 Quick Start V4 pl (PDF)
1 Pierwsze i ponowne uruchamianie
Zamknąć okno Ogólnie, klikając na symbol Zamknij
.
Pojawia się następujący komunikat: Zmiany zostały zapisane po-
myślnie.
Potwierdzić naciskając OK.
11. Potwierdzić komunikat KSS12017 (rozróżnia się tutaj 2 przypadki):
Robot jest przesuwany z X11: Potwierdzić komunikat przyciskiem po-
twierdzania na drzwiczkach ochronnych.
Robot jest przesuwany bez X11 (IBN-T1): Nacisnąć przycisk menu
głównego i wybrać kolejno punkty Pierwsze uruchomienie > Serwis
> Tryb rozruchowy.
KR C4 jest gotowy do pracy. Można wykonać pełną procedurę pierwszego
uruchomienia.
Rys. 1-5: Okno Ogólnie


Document Outline
Wyszukiwarka
Podobne podstrony:
AutoCAD 2005 PL Pierwsze kroki a25pkp(1)
Pierwsze kroki z RGH JTAG Aktualizacja FreeBoota krok 4
Protel DXP Pierwsze kroki [PL]
1997 01 Pierwsze kroki w cyfrówce
NA130PL 02 2005 Pierwsze Kroki
AutoCAD 2004 Pierwsze kroki
GAMS pierwsze kroki
Pierwsze kroki ku Miłości 5, rozwój duchowy, Rozwój duchowy, ROZWOJ DUCHOWY- EZOTERYKA
3 Pierwsze kroki ku Miłości i
Pierwsze kroki ku Miłości
5 Pierwsze kroki ku Miłości
Pierwsze kroki z RGH JTAG Połączenie FTP krok 2
Pierwsze kroki w SEE Electrical
więcej podobnych podstron