Technik mechatronik 2013 - zadanie 1
311 [50]-01 -132
1
2
Ii
!: ;m?
i
•
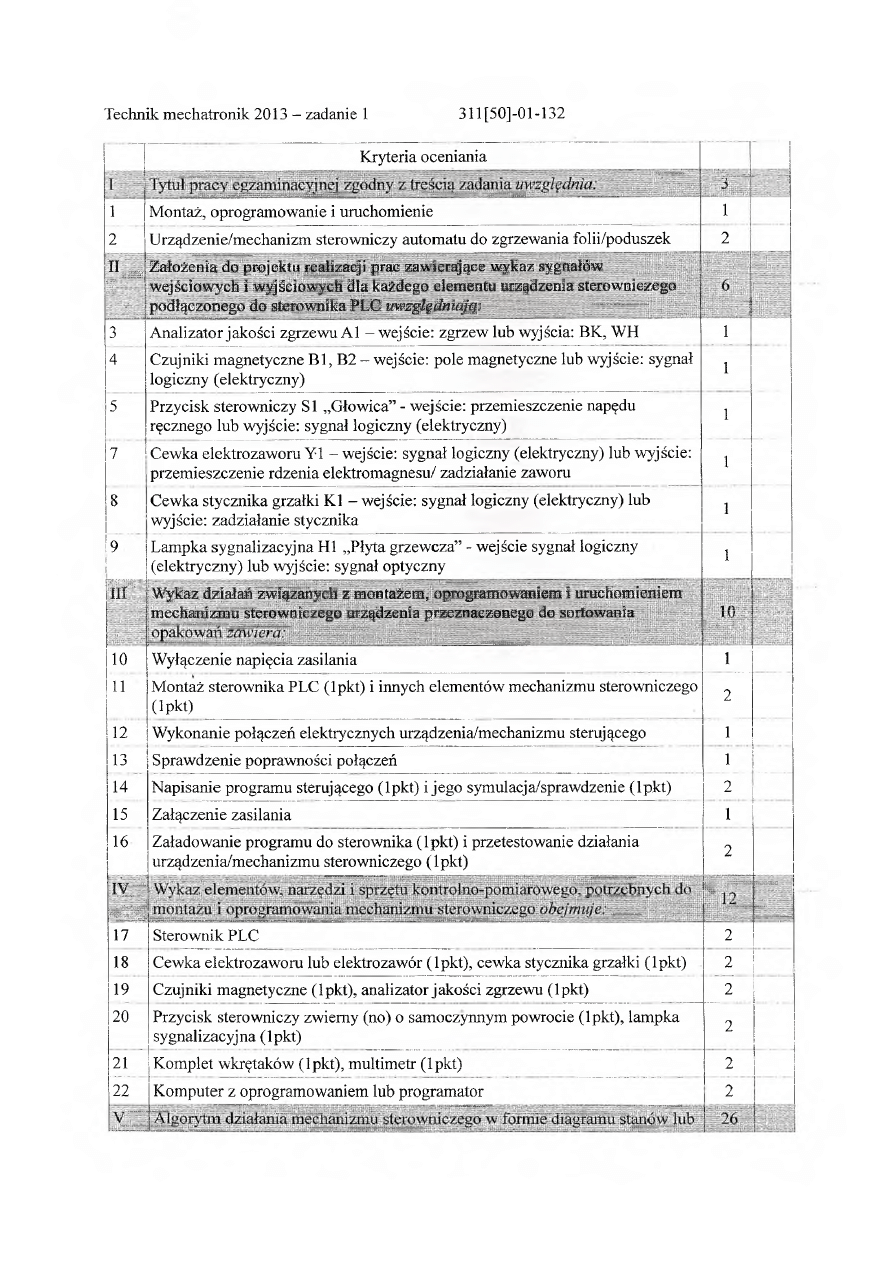
Kryteria oceniania
Montaż, oprogramowanie i uruchomienie
Urządzenie/mechanizm sterowniczy automatu do zgrzewania folii/poduszek
Założenia do projektu realizacji prac zawierające wykaz sygnałów
wejściowych i wyjściowych dla każdego elementu urządzenia sterowniczego
podłączonego do sterownika P L C uwzględniają:
1
2
3
Analizator jakości zgrzewu A l - wejście: zgrzew lub wyjścia: BK, W H
1
4
Czujniki magnetyczne B I, B2 - wejście: pole magnetyczne lub wyjście: sygnał
logiczny (elektryczny)
1
5
Przycisk sterowniczy SI „G łow ica” - wejście: przemieszczenie napędu
ręcznego lub wyjście: sygnał logiczny (elektryczny)
1
7
Cewka elektrozaworu Y1 - wejście: sygnał logiczny (elektryczny) lub wyjście:
przemieszczenie rdzenia elektromagnesu/ zadziałanie zaworu
1
8
Cewka stycznika grzałki K I - wejście: sygnał logiczny (elektryczny) lub
wyjście: zadziałanie stycznika
1
! 9
.
i
i
WM H 1
i III
Lampka sygnalizacyjna H I „Płyta grzewcza” - wejście sygnał logiczny
(elektryczny) lub wyjście: sygnał optyczny
Wykaz działań związanych z montażem, oprogramowaniem i uruchomieniem
mechanizmu sterowniczego urządzenia przeznaczonego do sortowania
1
i ń
i
-
;
■
10
W yłączenie napięcia zasilania
1
11
Montaż sterownika P L C (lp k t) i innych elementów mechanizmu sterowniczego
(lp k t)
2
12
Wykonanie połączeń elektrycznych urządzenia/mechanizmu sterującego
1
13
Sprawdzenie poprawności połączeń
1
1
. ... - - - - -
14
Napisanie programu sterującego (lp k t) i je g o symulacja/sprawdzenie (lp k t)
2
15
Załączenie zasilania
1
16
Załadowanie programu do sterownika (lp k t) i przetestowanie działania
urządzenia/mechanizmu sterowniczego (lp k t)
2
-
IV
p
S E
t
tf|
"
17
Sterownik P LC
2
18
Cewka elektrozaworu lub elektrozawór (lp k t), cewka stycznika grzałki (lp k t)
2
19
Czujniki magnetyczne (lp k t), analizator jakości zgrzewu (lp k t)
2
20
Przycisk sterowniczy zw iem y (no) o samoczynnym powrocie (lp k t), lampka
sygnalizacyj na (1 pkt)
2
21
Kom plet wkrętaków (lp k t), multimetr (lp k t)
2
22
Komputer z oprogramowaniem lub programator
2
i
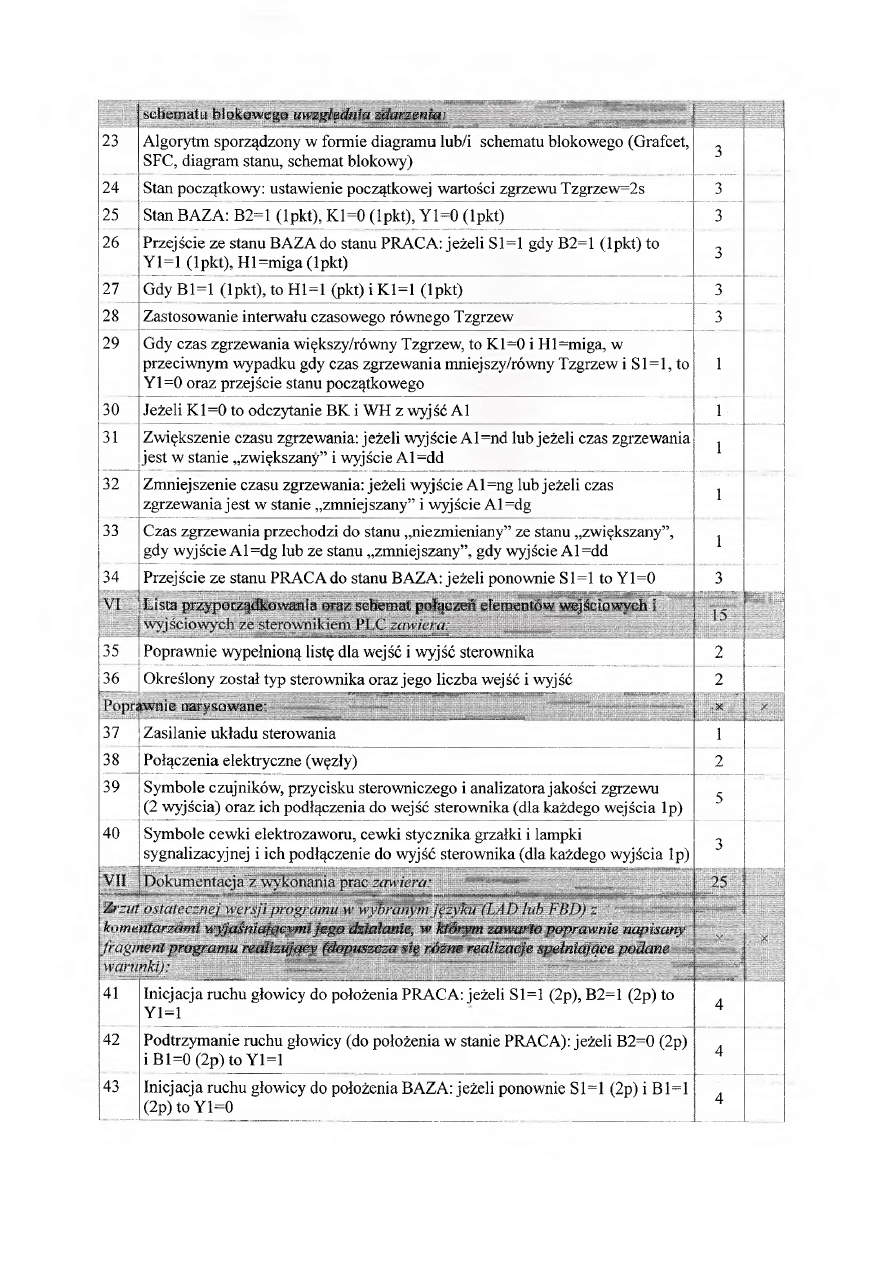
schematu blokowego uwzględnia
zdarzenia:
23
Algorytm sporządzony w formie diagramu lub/i schematu blokowego (Grafcet,
SFC, diagram stanu, schemat blokowy)
3
24
Stan początkowy: ustawienie początkowej wartości zgrzewu Tzgrzew=2s
3
25
Stan B A Z A : B 2 = l (lp k t), K1=0 (lp k t), Y 1 = 0 (Ip k t)
3
26
Przejście ze stanu B A Z A do stanu P R A C A : jeżeli S l= l gdy B 2 = l (lp k t) to
Y l = l (lp k t), H l= m ig a (lp k t)
3
27
Gdy B l = l (lp k t), to H l = l (pkt) i K l = l (lp k t)
3
28
Zastosowanie interwału czasowego równego Tzgrzew
3
29
Gdy czas zgrzewania większy/równy Tzgrzew, to K 1=0 i H l=m iga, w
przeciwnym wypadku gdy czas zgrzewania mniejszy/równy T zgrzew i S I =1, to
Y1 =0 oraz przejście stanu początkowego
1
30
Jeżeli K 1=0 to odczytanie B K i W H z wyjść A l
1
31
Zwiększenie czasu zgrzewania: jeżeli wyjście A l= n d łub jeżeli czas zgrzewania
jest w stanie „zwiększany” i wyjście A l= d d
1
32
Zmniejszenie czasu zgrzewania: jeżeli wyjście A l =ng lub jeżeli czas
zgrzewania jest w stanie „zmniejszany” i wyjście A l= d g
1
33
Czas zgrzewania przechodzi do stanu „niezmieniany” ze stanu „zwiększany” ,
gdy wyjście A l= d g łub ze stanu „zmniejszany” , gdy wyjście A l= d d
1
34
Przejście ze stanu P R A C A do stanu B A Z A : jeżeli ponownie S l= l to Y1 =0
Lista przyporządkowania oraz schemat połączeń elementów wejściowych i
3
m ' } : 9
35
Poprawnie wypełnioną listę dla wejść i wyjść sterownika
2
36
Określony został typ sterownika oraz jego liczba wejść i wyjść
iwnic tnrysownne*
2
, x , '
37
Zasilanie układu sterowania
1
38
Połączenia elektryczne (w ęzły)
2
39
Symbole czujników, przycisku sterowniczego i analizatora jakości zgrzewu
(2 wyjścia) oraz ich podłączenia do wejść sterownika (dla każdego wejścia lp )
5
40
V II
y
!;<> mc
Symbole cewki elektrozaworu, cewki stycznika grzałki i lampki
sygnalizacyjnej i ich podłączenie do wyjść sterownika (dla każdego wyjścia lp )
ntarzdmi wyjaśniającymi jego działanie, w którym zawarto poprawnie napisany
tent programu realizujący (dopuszcza się różne realizacje spełniajdee podane
.
.
.
r
3
41
Inicjacja ruchu głow icy do położenia P R A C A : jeżeli S l= l (2p), B 2 = l (2p) to
Y l = l
4
42
Podtrzymanie ruchu głow icy (do położenia w stanie P R A C A ): jeżeli B2=0 (2p)
i B1=0 (2p) to Y l = l
4
43
Inicjacja ruchu głow icy do położenia B A Z A : jeżeli ponownie S l= l (2p) i B l = l
(2p) to Y 1=0
4
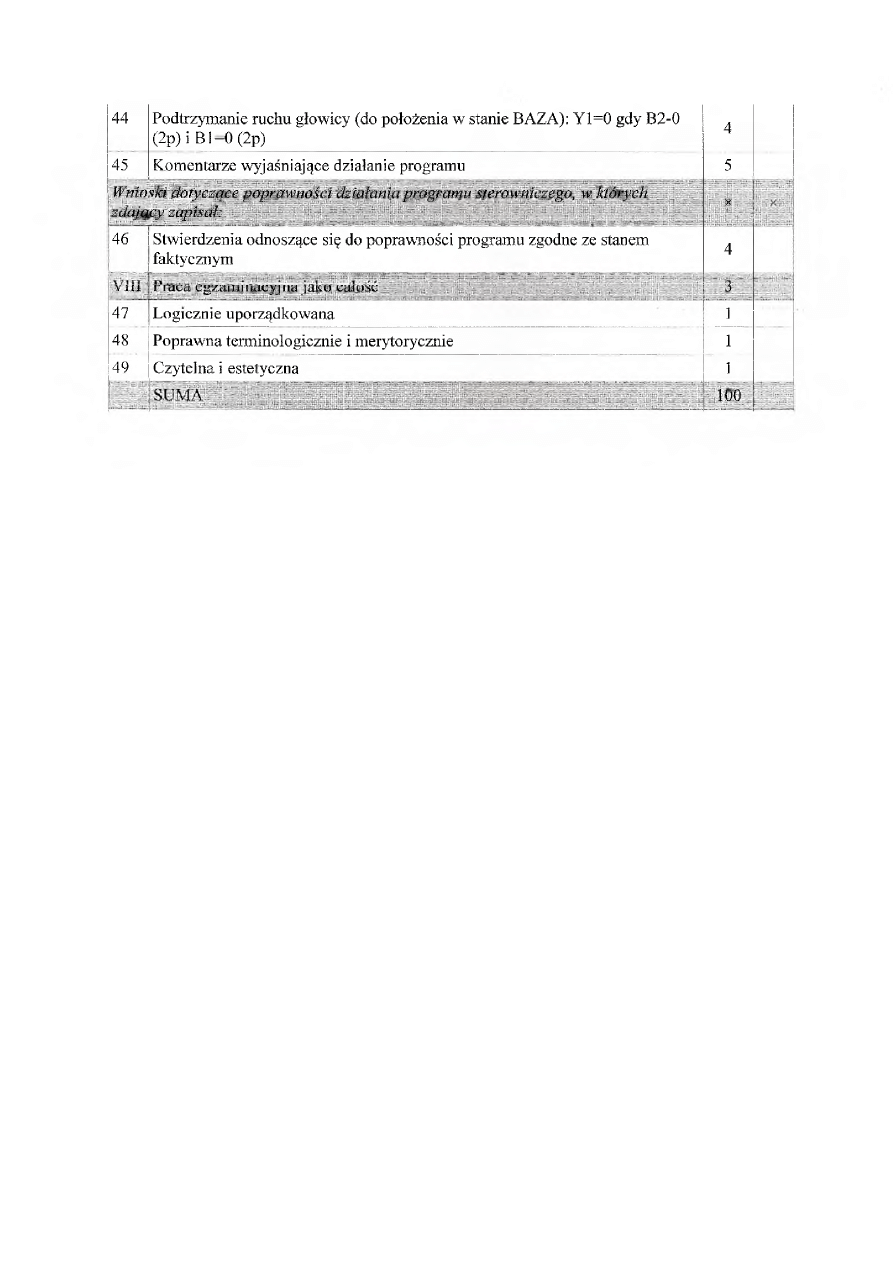
44
Podtrzymanie mchu głow icy (do położenia
(2p) i B 1 - 0 (2p)
w stanie B A Z A ): Y1=0 gdy B2-0
4
45
Wnio
Komentarze wyjaśniające działanie programu
ski dotyczące poprawności działania programu sterowniczego, w których
5
x
zdający zapisał:
..tu*. W * .«■>.•« 1 ira..
»re..f.n-.-
. ■
.vi ... ••
v ••■
- ..«■.■ w r**V
.r..-.. « . . . . • ." r ^ - . v -
-%..... , l..,.. ........ ...v . ........... *
46
i Stwierdzenia odnoszące się do poprawności programu zgodne ze stanem
faktycznym
. ... 1...... .. . ..
..
.
___________ .._____
.. ...........„...... ..... ........... ...,
'
\
4
!
3
1
Y l i i
47
riitea eg/.ainiluicyjiia
ko
cmosc
Logicznie uporządkowana
48
49
Poprawna terminologicznie i merytorycznie
1
1
1 AA
Czytelna i estetyczna
...
.
: . . . . . . . . . . r .
,
. . . . . . . . . . .
..
■
........
..
.................................
1UU
Wyszukiwarka
Podobne podstrony:
2013 311[50] 02 131 kryteria oceniania
2013 311[50] 01 131
2009 311[50] 01 092 kryteria oceniania
2011 311[50] 01 112
2008 311[50] 01 082
2012 311[50] 01 122
2010 311[50] 01 102
2013 Maj rozszerzenie kryteria oceniania
kryteria oceniania ti
2015 08 20 08 12 50 01
Kryteria oceniania z przedmiotu informatyka Gim 4
Kryteria oceniania WF 2009
2002 MAJ OKE PP III KRYTERIA OCENIANIA
arkusz 1 kryteria oceniania
2015 08 20 08 15 50 01
KRYTERIA OCENIANIA UCZNIÓW, Język polski i szkoła podstawowa
311[51] 01 122 Arkusz egzaminacyjny
01 27 Kryteria wyboru projektów
więcej podobnych podstron