Jan Meeth
Michael Schuth
Grundlagen und praktische Anwendung
der kinematischen Simulation
Bewegungssimulation
mit CATIA V5
Bewegungssimulation
mit
C
A
TIA
V5
Meeth
·
Schuth
Meeth · Schuth
Bewegungssimulation mit CATIA V5
Dieses Grundlagen- und Praxisbuch vermittelt das notwendige Know-how für alle,
die Bewegungssimulationen mit CATIA V5 durchführen wollen. Es wendet sich an
Ingenieure, Techniker, Konstrukteure, Studenten und Auszubildende technischer
Berufe. Die hier vorliegende 2. Auflage basiert auf der Programmversion CATIA V5
Release 18.
Ausführlich behandeln die Autoren die Arbeitsumgebung DMU Kinematics von
CATIA V5. Zusätzlich stellen sie einige Funktionen außerhalb des DMU Kinematik-
Simulators vor, wie etwa die Animation von Bemaßungsbedingungen. Um den
DMU Kinematik-Simulator effizient nutzen zu können, werden anschließend
die wichtigsten Grundlagen zur Getriebelehre vermittelt. Schwerpunkte sind hier
die Betrachtung der Freiheitsgrade von Körpern, Gelenken und Mechanismen.
Ein abschließendes Kapitel zeigt, wie sich aus zuvor generierten Bewegungs-
simulationen Animationen erstellen lassen.
Zahlreiche Übungsbeispiele zum Erstellen und Simulieren von Mechanismen
ermöglichen dem Leser, die Inhalte zu vertiefen und sie in seiner täglichen Arbeit
einzusetzen. Die Dateien zu sämtlichen Übungen sind unter
abrufbar.
studierte Wirtschaftsingenieurwesen an der FH Trier.
ist Dozent an der FH Trier im Bereich Technik.
Er leitet das Labor Gerätebau, Konstruktion und Bauteiloptimierung und führt
Konstruktionsprojekte mit der Industrie durch.
Dipl.-Ing. Jan Meeth
Prof. Dr. Ing. Michael Schuth
http://downloads.hanser.de
2., aktualisierte Auflage
ISBN 978-3-446-41452-5
www.hanser.de/cad
9 783446 414525
5
Inhalt
Vorwort ....................................................................... 7
1
Einleitung .................................................... 9
1.1
Begriffe.......................................................9
1.2
Getriebelehre und DMU Kinematics.... 10
2
Einführung in DMU Kinematics ........... 15
2.1
Vorstellung der Arbeitsumgebung
DMU Kinematics .................................... 16
2.1.1
Aufrufen der Arbeitsumgebung
DMU Kinematics .................................... 16
2.1.2
Symbolleisten von DMU Kinematics .. 18
2.1.3
Anpassen der Arbeitsumgebung
DMU Kinematics .................................... 27
2.2
Kinematische Simulation einer
Viergelenkkette ...................................... 29
2.2.1
Erstellen eines simulierbaren
Mechanismus.......................................... 29
2.2.2
Simulation mit Befehlen....................... 35
2.2.3
Simulation mit Regeln .......................... 37
2.2.4
Bearbeiten von Simulationen .............. 40
2.2.5
Erstellen einer Wiedergabe................... 41
2.3
Beispiele und Übungen ......................... 44
2.3.1
Bewegungssimulation einer Presse
mit Niederhalter ..................................... 44
2.3.2
Bewegungssimulation eines
Scheibenwischers................................... 51
2.4
Automatische
Überschneidungserkennung ................. 58
2.5
Umwandlung von
Baugruppenbedingungen ..................... 64
2.6
Animationen von
Bemaßungsbedingungen ...................... 75
3
Grundlagen zur Getriebelehre und
Anwendung von DMU Kinematics........83
3.1
Aufgaben und Inhalt der
Getriebelehre .......................................... 83
3.2
Aufbau von Getrieben und
Mechanismen ......................................... 85
3.2.1
Getriebeglieder und Gelenke ................ 86
3.2.2
Freiheitsgrade von Körpern.................. 87
3.2.3
Freiheitsgrade von Gelenken und
kinematischen Verbindungen .............. 88
3.2.4
Eigenschaften und Erzeugung von
kinematischen Verbindungen .............. 91
3.2.5
Zwanglauf und Freiheitsgrad von
Mechanismen und Getrieben ............. 175
3.2.6
Freiheitsgrad (Laufgrad) eines
ebenen Getriebes.................................. 177
3.2.7
Freiheitsgrade von Körperverbünden
im Raum................................................ 180
4
Übungsbeispiele zum Erstellen und
Simulieren von Mechanismen ............ 191
4.1
Bewegungssimulation eines
Werkzeugs ............................................ 191
4.2
Bewegungssimulation eines
Hubkolbenverdichters ......................... 197
4.3
Bewegungssimulation eines
Scharniermechanismus ....................... 206
4.4
Bewegungssimulation einer
Gelenkwelle .......................................... 214
4.5
Bewegungssimulation einer
Ladebordwand...................................... 223
4.6
Bewegungssimulation einer
Dampflokomotivsteuerung ................. 235
Inhalt
6
4.7
Bewegungssimulation eines
Radladers .............................................. 246
4.8
Erstellen einer Sequenz am Beispiel
eines Kolbenmotors ............................. 255
5
Getriebeanalyse und Simulation mit
Regeln ...................................................... 259
5.1
Analyse der Getriebekinematik.......... 259
5.1.1
Grundlagen zu grafischen Verfahren
der kinematischen Analyse ................ 259
5.1.2
Kurbelschwinge mit konstanter
Winkelgeschwindigkeit....................... 261
5.2
Simulation mit Regeln ........................ 273
5.2.1
Simulation mit Regeln am Beispiel
einer Kurbelschwinge.......................... 273
5.2.2
Erstellen von kombinierten
Sensorkurven ....................................... 280
5.2.3
Importieren von kinematischen
Regeln aus einer Textdatei ................. 284
6
Erstellen von Animationen ................. 287
6.1
Vorstellung der Arbeitsumgebung
„Photo Studio“ ..................................... 287
6.1.1
Die Symbolleiste „Wiedergabe“ ......... 288
6.1.2
Die Symbolleiste „Animation“ ........... 288
6.1.3
Die Symbolleiste „Szeneneditor“ ....... 289
6.2
Übungen zum Erstellen von
Animationen ........................................ 290
Literaturverzeichnis ............................................. 297
Index
................................................................... 299
15
2 Einführung in DMU Kinematics
Zu Beginn dieses Kapitels werden zunächst verschiedene Wege gezeigt, wie man die
Arbeitsumgebung CATIA V5 DMU Kinematics starten kann. Anschließend erfolgt eine
sehr kurze Vorstellung einzelner Symbolleisten. Dadurch soll ein erster Eindruck über
die Verwendungsmöglichkeiten dieser Arbeitsumgebung vermittelt werden.
Nach diesem Überblick werden die elementaren Funktionen von DMU Kinematics
an dem einfachen Beispiel einer Viergelenkkette ausführlich dargestellt. Dabei wird
gezeigt, wie man mit CATIA einen simulierbaren Mechanismus erzeugt und wie
man ihn mithilfe der beiden Simulationsmodi „Simulation mit Befehlen“ und „Si-
mulation mit Regeln“ auf zwei Arten simulieren kann.
Im Anschluss daran werden weitere Simulationen von einer Presse mit Niederhalter
und dem Getriebe eines Scheibenwischerantriebs vorgeführt. An diesen beiden Bei-
spielen werden auch bereits Verwendungsmöglichkeiten der Arbeitsumgebung Ge-
nerative Drafting in Verbindung mit Getriebesimulationen erläutert. Zusätzlich wird
beim zweiten Beispiel die Funktion „Verlaufslinie“ angewendet, um das Wischfeld
des Scheibenwischers zu erzeugen und es auf einer technischen Zeichnung darstel-
len zu können. Bei diesen Beispielen wurde der simulierbare Mechanismus aus-
schließlich in der Arbeitsumgebung DMU Kinematics erzeugt.
Prinzipiell gibt es in CATIA V5 jedoch zwei Wege, um zu einem simulierbaren Me-
chanismus zu gelangen. Die beiden Wege unterscheiden sich vor allem hinsichtlich
der Verbindungserstellung zwischen den einzelnen Bauteilen der zu simulierenden
Baugruppe. Der erste Weg besteht darin, kinematische Verbindungen zwischen den
Bauteilen in der Arbeitsumgebung DMU Kinematics zu erstellen. Bei manchen Me-
chanismen bietet sich die zweite Möglichkeit an, Bewegungssimulationen zu defi-
nieren, bei der man auf im Assembly Design erstellte Verbindungen zurückgreift
und CATIA V5 automatisch die daraus entsprechenden kinematischen Verbindun-
gen erstellen lässt.
Außerdem können Getriebesimulationen ebener Mechanismen prinzipiell auch im
Skizzierer von CATIA V5 durchgeführt werden. Am Ende dieses Kapitels soll kurz
auf diese Möglichkeit, im Skizzierer mit der Funktion „Animation von Bemaßungs-
bedingungen“ einfache ebene Getriebesimulationen zu erstellen, eingegangen wer-
den. Dies geschieht auf der Basis von Bedingungen, mit denen die geometrischen
Elemente der Skizze verknüpft sind. Eine der Bedingungen muss dann animiert
werden, was der Definition eines Antriebes entspricht (Bild 1.2-c).
2 Einführung in DMU Kinematics
16
2.1
Vorstellung der Arbeitsumgebung DMU Kinematics
Nach dieser zusammenfassenden Einleitung folgt zunächst eine Vorstellung der Ar-
beitsumgebung DMU Kinematics, bevor anhand von Beispielen die prinzipielle Vor-
gehensweise mit CATIA V5 DMU Kinematics dargestellt wird.
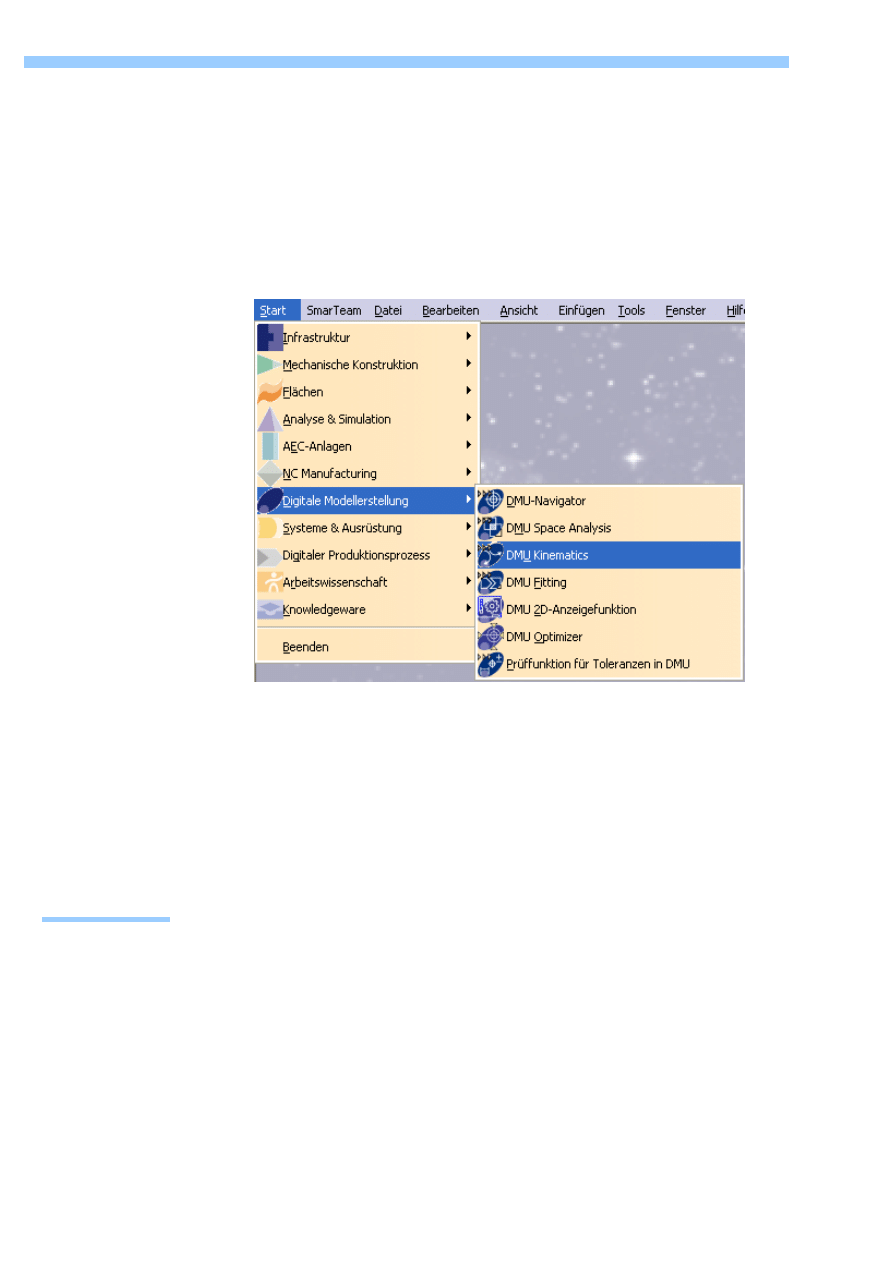
2.1.1
Aufrufen der Arbeitsumgebung DMU Kinematics
Wo die Arbeitsumgebung DMU Kinematics zu finden ist und wie sie aufgerufen
wird, zeigt Bild 2.1.
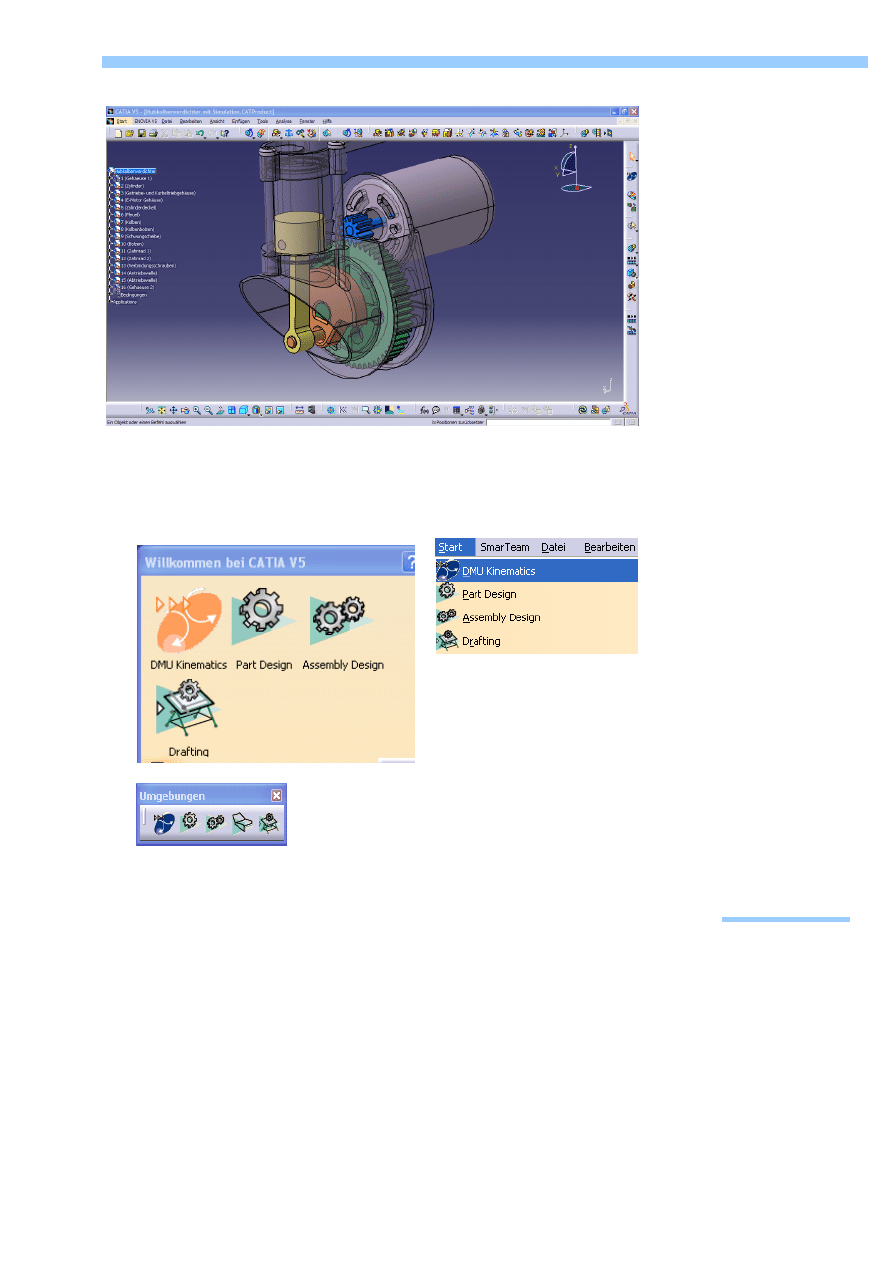
Bild 2.2 zeigt die Arbeitsumgebung des CATIA V5 DMU Kinematik-Simulators, die
aber auch auf andere Art und Weise aufgerufen werden kann.
Bild 2.1:
Aufrufen der Workbench
DMU Kinematics
2.1 Vorstellung der Arbeitsumgebung DMU Kinematics
17
Außerdem kann man unter bestimmten Voraussetzungen DMU Kinematics über das
beim Neustart von CATIA erscheinende Fenster (Bild 2.2-a), über Start in der Menü-
leiste wie in Bild 2.2.-b oder über die Symbolleiste „Umgebungen“ (Bild 2.2-c) auf-
rufen. Dazu müssen die Schritte durchgeführt werden, die in Bild 2.3 dargestellt
sind.
Bild 2.2:
Arbeitsumgebung
DMU Kinematics
Bild 2.2-a: Aufrufen von
DMU Kinematics beim
Start von CATIA
Bild 2.2-b und 2.2.-c:
Aufrufen von DMU Kine-
matics über die Menü-
leiste „Start“ und die
Symbolleiste „Umge-
bungen“
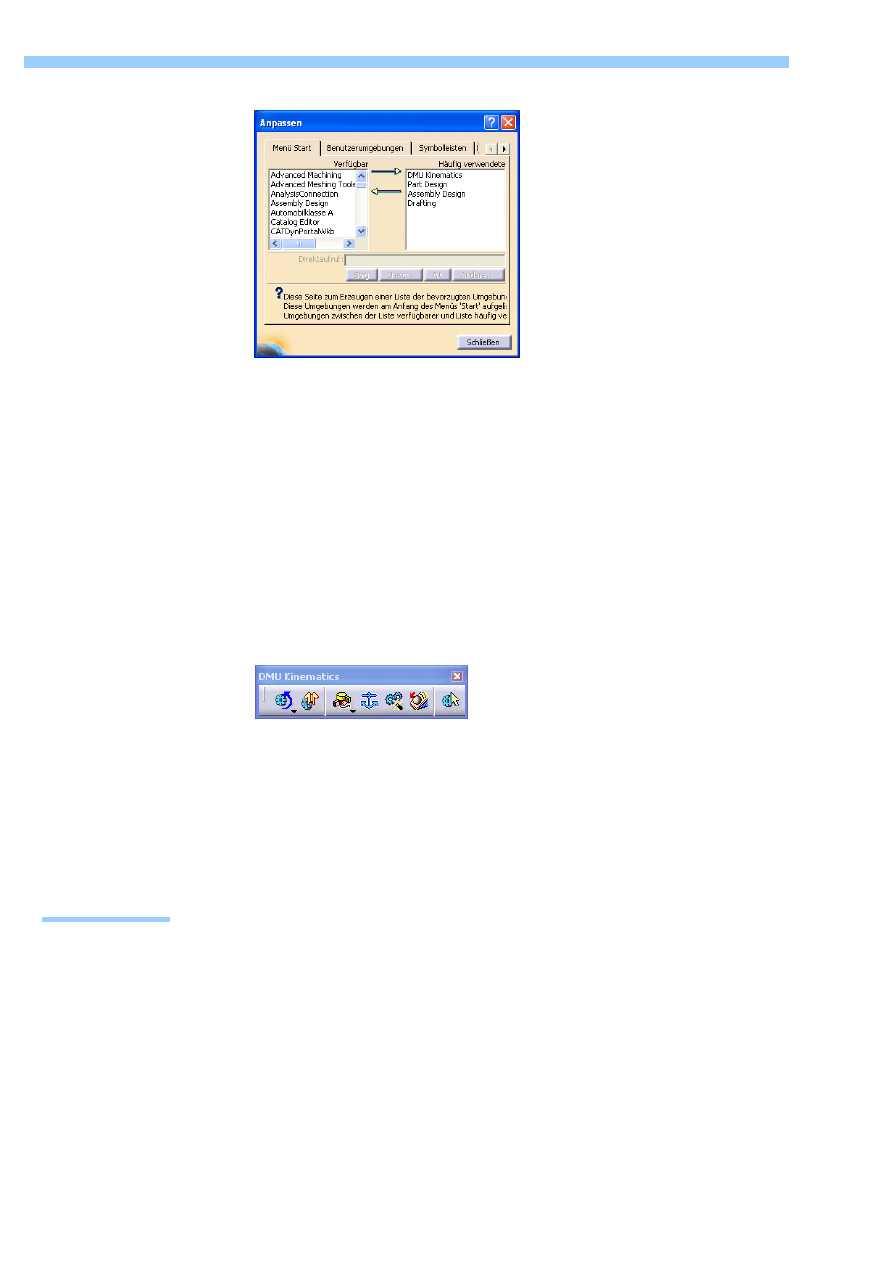
2 Einführung in DMU Kinematics
18
Erstellen einer Liste von bevorzugten
Umgebungen:
→ Ansicht (Menüleiste) → Symbol-
leisten
→ Anpassen… → Registerkar-
te: Menü Start
→ DMU Kinematics (und andere oft
verwendete Arbeitsumgebungen) mar-
kieren
→ Klick auf den Pfeil nach
rechts
→ S
CHLIEßEN
→ die ausgewählten Umgebungen
können über „Start“ nun direkt oder
über die Symbolleiste „Umgebungen“
angewählt werden. Falls diese nicht
angezeigt wird, kann sie folgenderma-
ßen angezeigt werden:
→Ansicht → Symbolleisten → Symbolleiste „Umgebungen“ anzeigen
Nach dem Aufrufen der Arbeitsumgebung DMU Kinematics stellt sie dem Anwender
verschiedene Symbolleisten bereit, die nun kurz vorgestellt werden, um einen ersten
Eindruck zu vermitteln.
2.1.2
Symbolleisten von DMU Kinematics
Um einen Überblick über den Funktionsumfang und die Anwendungsmöglichkeiten
der Arbeitsumgebung DMU Kinematics zu erhalten, sollen die einzelnen Symbol-
leisten, die in CATIA V5 standardmäßig zu DMU Kinematics gehören, dargestellt
und kurz erläutert werden.
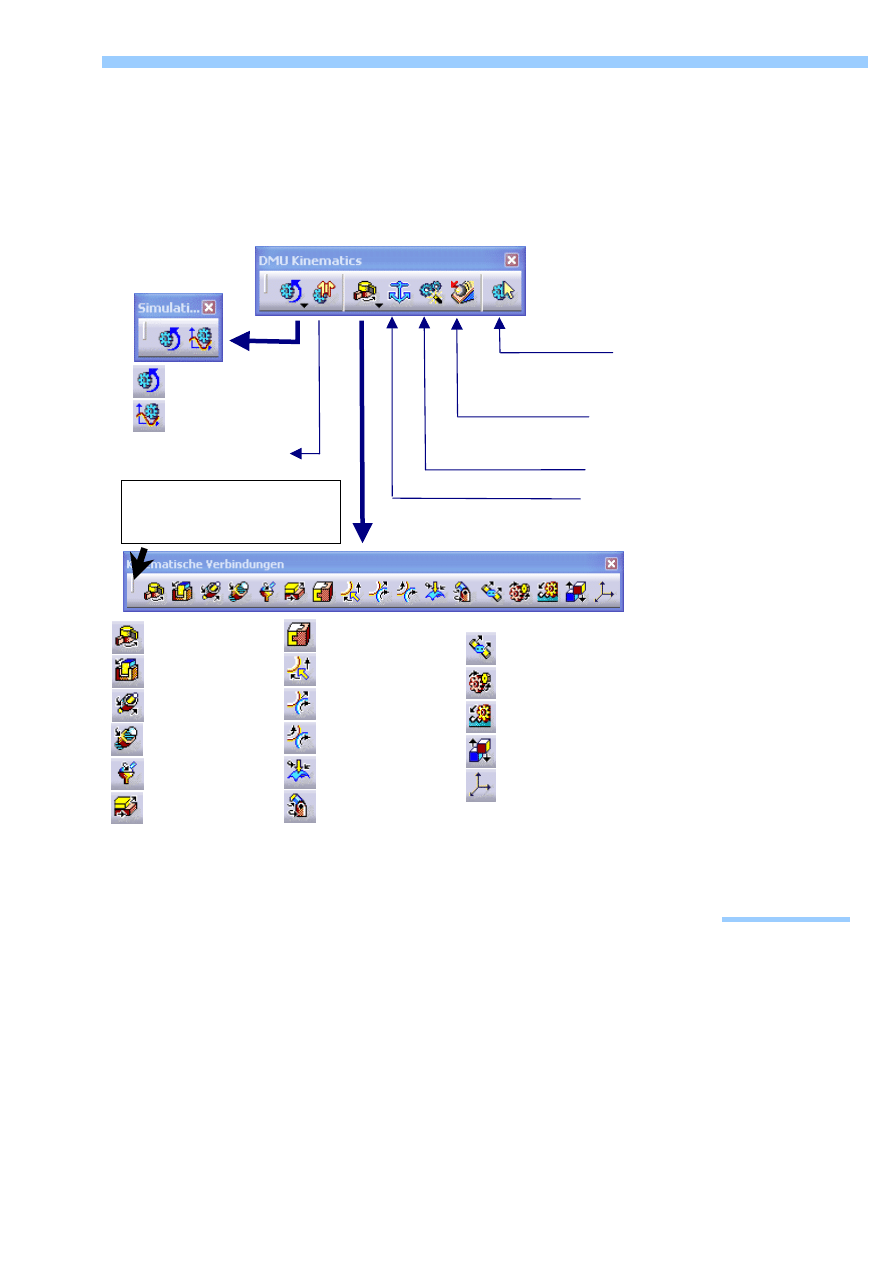
2.1.2.1
Die Symbolleiste „DMU Kinematics“
Die Symbolleiste „DMU Kinematics“ (Bild 2.4)
enthält die elementaren Funktionen, die zur
Definition des Getriebes und der Simulation
notwendig sind. Zu der Definition eines Ge-
triebes gehören unter anderem die Definition
der Festkomponente und der Gelenke des Getriebes. Diese Gelenke werden über die
kinematischen Verbindungen bestimmt.
Die Leiste „Kinematische Verbindungen“ (Bild 2.5) kann neben der Symbolleiste
„Simulation“ durch einen Doppelklick abgekoppelt werden.
Zur Simulation stehen die beiden Modi „Simulation mit Befehlen“ und „Simulation
mit Regeln“ zur Verfügung, die beide in diesem Kapitel vorgestellt werden. Außer-
dem bietet sich bei manchen Getrieben die bereits erwähnte Funktion „Umwandlung
Bild 2.3:
Dialogfenster zum Erstel-
len einer Liste bevorzugter
Bedingungen
Bild 2.4:
Symbolleiste
„DMU Kinematics“
2.1 Vorstellung der Arbeitsumgebung DMU Kinematics
19
von Baugruppenverbindungen“ an, mit der man aus im Assembly Design erstellten
Baugruppenbedingungen kinematische Verbindungen generieren kann. Die Ver-
wendung verschiedener kinematischer Verbindungen wird im weiteren Verlauf die-
ses Buches dargestellt. Dies gilt auch für die Funktionen „Umwandlung von Bau-
gruppenbedingungen“, „Mechanismusanalyse“ sowie die Funktion „Geschwindigkeit
und Beschleunigung“.
Bild 2.5:
Übersicht über Symbol-
leisten „DMU Kinematics“
und die davon abkoppel-
baren Symbolleisten „Si-
mulation“ und „Kinema-
tische Verbindungen“
Symbolleiste:
Kinematische Verbindungen
Definition der Festkomponente
Umwandlung von Baugruppenbe-
dingungen
Doppelgelenk
Zahnradverbindung
Zahnstangenverbind.
Kabelverbindung
Achsenbasierte Verbind.
Starre Verbindung
Punktkurvenverbindung
Gleitkurvenverbindung
Rollkurvenverbindung
Punktflächenverbindung
Drehverbindung
Prismatische Verbind.
Zylindrische Verbind.
Schraubverbindung
Kugelgelenkverbindung
Simulation mit Befehlen
Simulation mit Regeln
Mechanismusaufbereitung
Doppelklick auf diesen schmalen Balken
bewirkt das An- oder Abkoppeln der
Symbolleiste
Symbolleiste
Simulation
Mechanismusanalyse
Geschwindigkeit und
Beschleunigung
Symbolleiste DMU Kinematics
299
Index
Abhängige Länge 99
Abtriebsglied 86
Achsensysteme 162
Aktion bearbeiten 257
Animation 290
Animation von Bemaßungs-
bedingungen 15
Animation wiedergeben 292
Animationen 287
Animationsdatei 43
Antriebsfunktion 259
Antriebsglied 86
Arbeitsumgebung DMU
Kinematics 16
Assembly Design 15
Astschere 111
Automatische Überschneidungs-
erkennung 44
Bahnkurve 181
Baugruppenbedingungen 91, 97
Befehl 92
Beleuchtung 288
Beleuchtungsbefehle 294
Beschleunigung 181
Beschleunigungsmaßstab 259
Bezugsglied 86
Bezugssystem 87
Bildformat 291
Bildgröße 291
Blickpunkt 288
Bohrungen 86
Bolzen 86
Dampfkanäle 83
Dampflokomotive 235
Dampfzylinder 83
Definition der Filmaufnahme 288
Differentialschraube 101
Differentialschraubengetriebe 101
Digital-Mock-Up 10
DMU Fitting 10, 256
Doppelgelenk 149
Drehen 90
Drehgelenk 11, 92
Drehschubgelenk 89, 98
Drehsockel erzeugen 288
Drehverbindung 92
Druckgusswerkzeug 191, 292
Druckmittel 86
Ebene Verbindung 108
Eigenrotation 183
Einzelradaufhängung 83, 180,
186
Elementarbewegungen 87, 88
Erneute Wiedergabe 288
Fahrbahnunebenheiten 181
Fahrzeugtechnik 134
Filmaufnahmen 287
Flächenberührung 90
Fördergetriebe 118
Freiheitsgrad 87, 88, 175, 177
Gelenkbauarten 89
Gelenkdreieck 177
Gelenkfünfeck 177
Gelenkgabel 149
Gelenkhälfte 89
Gelenkviereck 177
Gelenkwelle 149, 215
Generative Drafting 15
Gesamtsteigung 101
Geschwindigkeitsmaßstab 259
Getriebe 9
Getriebeanalyse 84, 259
Getriebedarstellungen 86
Getriebedynamik 84, 259
Getriebeglied 11
starr 86
Getriebekinematik 84
Getriebelehre 9
Getriebestruktur 86
Getriebesynthese 84
Getriebesystematik 84
Getriebetechnik 83
Gewindesteigung 101
Gleitkurvenverbindung 128
Gruppierung 115
Heusinger-Steuerung 83, 235
Hohlrad 134
Hubkolbenverdichter 199
Identische Freiheiten 183
Industrieroboter 83
Kabelverbindung 160
Kamerabefehle 294
Ketten 86
Kinematik 9
Kinematische Funktion 86
Kinematische Kette 11, 12, 83,
177, 182
Kinematische Verbindungen 18
Kinetik 9
Knicklenkung 247
Kolbenmotor 255
Kongruenz 94
Kraftfluss 134
Kugelflächengelenk 89
Kugelgelenk 87, 89, 106
Kugeln 86
Kugelpfanne 187
Kugelschalen 86
Kurbelschwinge 261
Ladebordwand 223
Längenmaßstab 259
Laufgrad 175
Lenkerfreiheitsgrad 183
Lichtquellen 288
Index
300
Linienberührung 90
Lokomotivsteuerung 235
Material 292, 293
Mathematische Funktion 85
Mechanismus 11
Mechanismusanalyse 19, 189
Momentanpol 260
Mutter 100
Parallelkurbel 225
Photo Studio 287
Pixelzahl 291
Planetengetriebe 134
Planetenräder 134
Planetenradsatz 134
Player 43
Polygonmethode 261
Präsentation 287
Presse mit Niederhalter 44
Prismatische Verbindung 95
Produktpräsentation 287
Punktbahn 85
Punktberührung 90
Punktflächenverbindung 144
Punktkurvenverbindung 117, 118
Radlader 246
Ravigneaux 134
Real Time Rendering 287
Relativbewegung 21, 87, 88
Relativrotation 89
Reuleaux 11
Riemen 86
Rollenzuführung 122
Rollkurve 131
Rollkurvenverbindung 132
Rotation 87
Rückwärtsgang 135
Schaltungsmöglichkeiten 134
Scharniermechanismus 206
Schaufellader 83
Scheibenwischerantrieb 15
Schieben 90
Schieberstange 83
Schleifenmodus 42
Schnelle Wiedergabe 288
Schnellgang 135
Schrauben 90
Schraubengelenk 100
Schraubengetriebe 100
Schraubverbindung 91, 100
Seile 86
Sequenz 255
Sichtbarkeitsaktion 256
Simpson-Getriebe 134
Simulation 34, 35
Simulation mit Befehlen 15
Simulation mit Regeln 15, 37
Simulation umwandeln 43
Simulationsmodi 15
Sonnenrad 134
Spindel 100
Standardmaterialkatalog 293
Starrachse 180
Starre Verbindung 115
Steigungsdifferenz 101
Szeneneditor 289
Teleskopspindel 101
Trace 213
Translation 87
Übersetzungsverhältnis 153
Übertragungsgetriebe 85
Umgebung 288
Umlaufgetriebe 153
Umwandlung von Baugruppen-
bedingungen 91
Unfreiheiten 90
Universalgelenk 147, 208
Universalverbindung 147
Unterverbindungen 157
Verbindung aus Achsensystemen
162
Verbindungsgrenzen 191
Verbindungslimits 194
Verlaufslinie 15, 44
Video-Dateien 41
Videoschaltflächen 41
Viergelenkgetriebe 10
Vorschubbewegung 89
Walschert-Steuerung 235
Wiedergabe 42
Wiedergabe generieren 41
Wirkungsgrad 102
Wischfeld 15
Zahnradverbindung 153
Zahnstange 157
Zahnstangenverbindung 157
Zeichnungsableitung 50
Zeichnungsansicht 44
Zeitintervall 43
Zentriert 93
Zugmittel 86
Zwanglauf 11, 175
Zwanglaufgleichung 184
Zwangläufig 175
Zweifachschraubgetriebe 101
Zweistufige Planetenradsätze 134
Zylinderfüllung 83
Zylindrische Verbindung 98
Document Outline
- 9783446414525_cover.pdf
- 9783446414525.pdf
- Inhalt
- Vorwort
- 1 Einleitung
- 1.1 Begriffe
- 1.2 Getriebelehre und DMU Kinematics
- 2 Einführung in DMU Kinematics
- 2.1 Vorstellung der Arbeitsumgebung DMU Kinematics
- 2.1.1 Aufrufen der Arbeitsumgebung DMU Kinematics
- 2.1.2 Symbolleisten von DMU Kinematics
- 2.1.2.1 Die Symbolleiste „DMU Kinematics“
- 2.1.2.2 Die Symbolleiste „Simulation“
- 2.1.2.3 Die Symbolleiste „Kinematische Verbindungen“
- 2.1.2.4 Die Symbolleiste „Generische Animation“
- 2.1.2.5 Symbolleiste zum Bearbeiten und Wiedergeben von Sequenzen
- 2.1.2.6 Die Symbolleiste „Automatische Überschneidungserkennung“
- 2.1.2.7 Die Symbolleiste „Kinematik-Aktualisierung“
- 2.1.2.8 Die Symbolleiste „3D-Analyse für digitale Modellerstellung“
- 2.1.3 Anpassen der Arbeitsumgebung DMU Kinematics
- 2.2 Kinematische Simulation einer Viergelenkkette
- 2.2.1 Erstellen eines simulierbaren Mechanismus
- 2.2.2 Simulation mit Befehlen
- 2.2.3 Simulation mit Regeln
- 2.2.4 Bearbeiten von Simulationen
- 2.2.5 Erstellen einer Wiedergabe
- 2.3 Beispiele und Übungen
- 2.3.1 Bewegungssimulation einer Presse mit Niederhalter
- 2.3.2 Bewegungssimulation eines Scheibenwischers
- 2.4 Automatische Überschneidungserkennung
- 2.5 Umwandlung von Baugruppenbedingungen
- 2.6 Animationen von Bemaßungsbedingungen
- 2.1 Vorstellung der Arbeitsumgebung DMU Kinematics
- 3 Grundlagen zur Getriebelehre und Anwendung vonDMU Kinematics
- 3.1 Aufgaben und Inhalt der Getriebelehre
- 3.2 Aufbau von Getrieben und Mechanismen
- 3.2.1 Getriebeglieder und Gelenke
- 3.2.2 Freiheitsgrade von Körpern
- 3.2.3 Freiheitsgrade von Gelenken und kinematischen Verbindungen
- 3.2.4 Eigenschaften und Erzeugung von kinematischen Verbindungen
- 3.2.4.1 Drehverbindung
- 3.2.4.2 Prismatische Verbindung
- 3.2.4.3 Zylindrische Verbindung
- 3.2.4.4 Schraubverbindung
- 3.2.4.5 Kugelgelenkverbindung
- 3.2.4.6 Ebene Verbindung
- 3.2.4.7 Starre Verbindung
- 3.2.4.8 Punktkurvenverbindung
- 3.2.4.9 Gleitkurvenverbindung
- 3.2.4.10 Rollkurvenverbindung
- 3.2.4.11 Punktflächenverbindung
- 3.2.4.12 Universalverbindung
- 3.2.4.13 Doppelgelenk
- 3.2.4.14 Zahnradverbindung
- 3.2.4.15 Zahnstangenverbindung
- 3.2.4.16 Kabelverbindung
- 3.2.4.17 Verbindung aus Achsensystemen
- 3.2.5 Zwanglauf und Freiheitsgrad von Mechanismen und Getrieben
- 3.2.6 Freiheitsgrad (Laufgrad) eines ebenen Getriebes
- 3.2.7 Freiheitsgrade von Körperverbünden im Raum
- 4 Übungsbeispiele zum Erstellen und Simulieren vonMechanismen
- 4.1 Bewegungssimulation eines Werkzeugs
- 4.2 Bewegungssimulation eines Hubkolbenverdichters
- 4.3 Bewegungssimulation eines Scharniermechanismus
- 4.4 Bewegungssimulation einer Gelenkwelle
- 4.5 Bewegungssimulation einer Ladebordwand
- 4.6 Bewegungssimulation einer Dampflokomotivsteuerung
- 4.7 Bewegungssimulation eines Radladers
- 4.8 Erstellen einer Sequenz am Beispiel eines Kolbenmotors
- 5 Getriebeanalyse und Simulation mit Regeln
- 5.1 Analyse der Getriebekinematik
- 5.1.1 Grundlagen zu grafischen Verfahren der kinematischen Analyse
- 5.1.2 Kurbelschwinge mit konstanter Winkelgeschwindigkeit
- 5.2 Simulation mit Regeln
- 5.2.1 Simulation mit Regeln am Beispiel einer Kurbelschwinge
- 5.2.2 Erstellen von kombinierten Sensorkurven
- 5.2.3 Importieren von kinematischen Regeln aus einer Textdatei
- 5.1 Analyse der Getriebekinematik
- 6 Erstellen von Animationen
- 6.1 Vorstellung der Arbeitsumgebung „Photo Studio“
- 6.1.1 Die Symbolleiste „Wiedergabe“
- 6.1.2 Die Symbolleiste „Animation“
- 6.1.3 Die Symbolleiste „Szeneneditor“
- 6.2 Übungen zum Erstellen von Animationen
- 6.1 Vorstellung der Arbeitsumgebung „Photo Studio“
- Literaturverzeichnis
- Index
- 9783446414525_bc.pdf
Wyszukiwarka
Podobne podstrony:
CATIA V5 Training Basics
CATIA V5 kurs podstawowy
CATIA V5 Modelowanie PL
Catia v5 Structural Analysis For The Designer
catia v5 modelowanie kurs podstawowy LZIVC3JESPF2KJV3WU7KPG7Z742RKIM3LA77XXA
CATIA V5 Training Basics
CATIA V5 tutorial advanced
CATIA V5 Workbook
Advanced Catia v5 Workbook
catia v5 machining brochure
Airbus Catia V5 Training Wireframe and Surface
Mit polityczny
18 Mit mityzacja mitologie wsp Nieznany (2)
zestawy glosnikowe cz1 MiT 10 2007
Legendy Mit o stworzeniu
Mit monogamii Jak poradzic sobie ze zdrada partnera mitmon
mit
więcej podobnych podstron