
Politechnika Śląska
Gliwice, 2006/2007
Wydział: Automatyki, Elektroniki i Informatyki
Semestr: 6 (letni)
Kierunek: Automatyka i robotyka
Podstawy Automatyki
– laboratorium
Ćw 8. Regulacja dyskretna w czasie.
Data ćwiczeń laboratoryjnych:
18.04.2007
Grupa: 1
Sekcja: 3
Skład osobowy sekcji:
Zięba Andrzej
Bojko Marcin
Pawliczek Krystian
1. Cel ćwiczenia:
Celem ćwiczenia było przeanalizowanie działania dyskretnego układu regulacji.
Należało na podstawie odpowiednich charakterystyk jak też odpowiedzi skokowych układu
dokonać porównania układu ciągłego z dyskretnym w zależności od zadanych okresów
próbkowania. Badania należało przeprowadzić dla zadanego układu ciągłego (transmitancja zadana
przez prowadzącego) z wykorzystaniem impulsatora idealnego i ekstrapolatora zerowego rzędu.
2. Program ćwiczenia:
I. ANALIZA UKŁADU OTWARTEGO:
1. Wykreślić odpowiedź skokową i charakterystyki częstotliwościowe: amplitudowo-fazową,
modułu i fazy dla obiektu o zadanej przez prowadzącego transmitancji:
K s=
1
1sT
1
1sT
2
; T
1
=
3 s ; T
2
=
4,5 s .
2. Dla zadanego czasu próbkowania T
i
= T
1
wyznaczyć analitycznie transmitancję dyskretną K(z)
obiektu pokazanego na rysunku 1, obliczyć jej wzmocnienie, zera i bieguny.
3. Dla czasów próbkowania T
i
= 0,1 T
1
; 0,2 T
1
; 0,5 T
1
; 1,0 T
1
; 3,0 T
1
:
a)
Odczytać transmitancje dyskretną, wzmocnienie, zera, bieguny ze środowiska Matlab.
b)
Zaznaczyć położenia zer i biegunów na płaszczyźnie z.
c)
Narysować odpowiedź skokową obiektu.
d)
Wykreślić charakterystykę amplitudowo-fazową do pulsacji Nyquista ω
i
= π/T
i
,
odczytać wartość modułu transmitancji dla ω
i
.
e)
Wykreślić charakterystyki częstotliwościowe modułu i fazy do pulsacji będącej
wielokrotnością ω
i
(liniowa skala pulsacji), odczytać maksymalne wartości modułu i
odpowiadające im wartości pulsacji.
4. Przeanalizować wpływ okresu próbkowania na położenie zer i biegunów transmitancji
dyskretnej, postać przebiegów czasowych i charakterystyk częstotliwościowych. Porównać
otrzymane przebiegi i charakterystyki z analogicznymi wykresami uzyskanymi dla układu
ciągłego w czasie. Wybrać „optymalną” wartość czasu próbkowania.
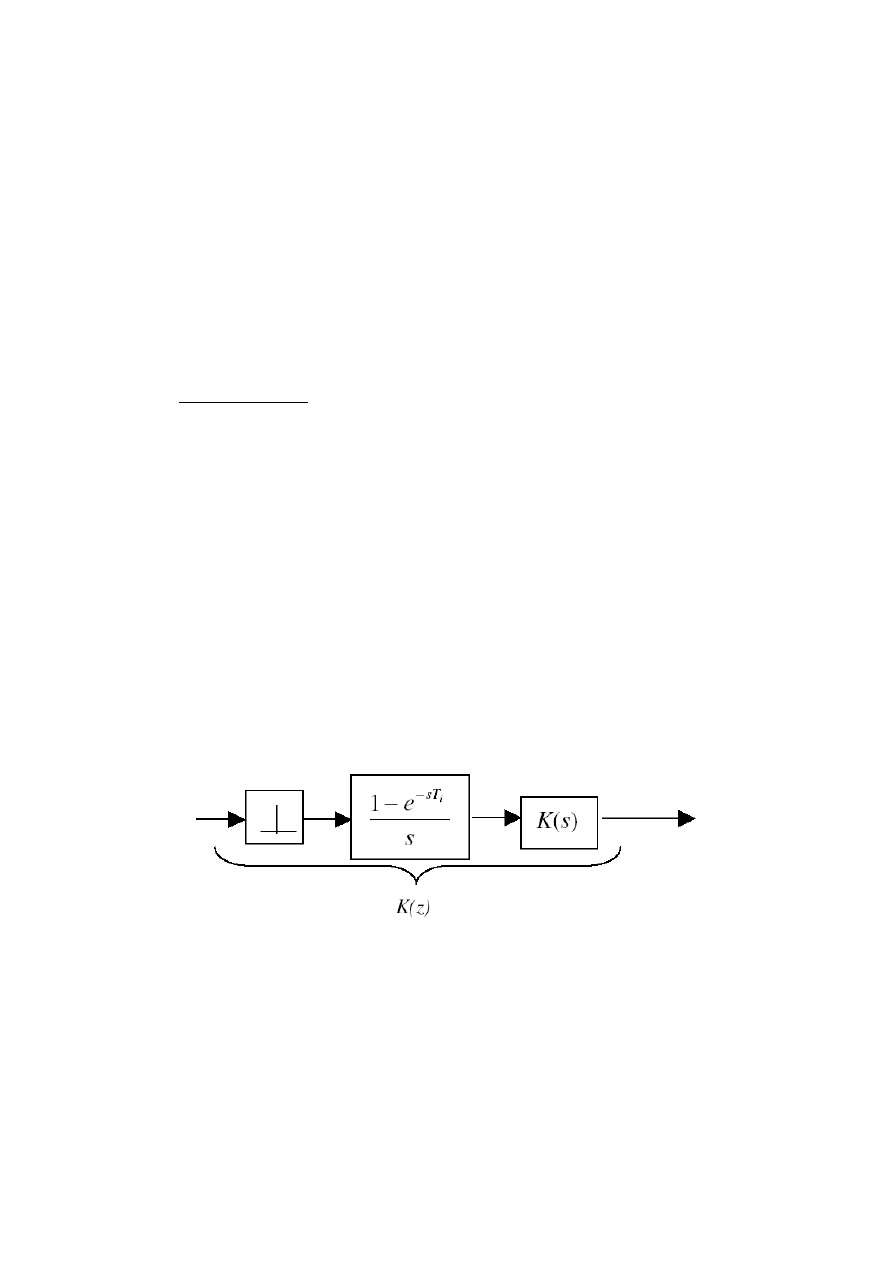
Rysunek 1. Schemat blokowy układu otwartego.
II. ANALIZA UKŁADU ZAMKNIĘTEGO:
5. Wyznaczyć analitycznie transmitancje dyskretną K(z) układu otwartego (struktura jak na
rysunku 1) dla „optymalnego” okresu próbkowania (z punktu 4), oraz wyznaczyć wzmocnienie
graniczne układu zamkniętego o strukturze jak na rysunku 2.
6. Wykreślić linie pierwiastkowe układu. Odczytać wzmocnienia, dla których równanie
charakterystyczne posiada:
a)
pierwiastki rzeczywiste: dodatnie, ujemne, różnych znaków.
b)
pierwiastki zespolone o częściach rzeczywistych: dodatnich, ujemnych, różnych
znaków.
7. Dla wzmocnień wybranych ze znalezionych powyżej zakresów wykreślić odpowiedzi skokowe
dyskretnego układu zamkniętego i porównać je.
8. Dla wzmocnień wybranych w punkcie 7 wykreślić odpowiedzi skokowe ciągłego układu
zamkniętego.
9. Dla innej niż „optymalna” wartości okresu próbkowania wyznaczyć analitycznie K(z) oraz
wzmocnienie graniczne układu zamkniętego. Dla wybranych w punkcie 7 wartości wzmocnień
sprawdzić położenie pierwiastków równania charakterystycznego i narysować odpowiedzi
skokowe.
10. Przeanalizować wpływ okresu impulsowania na działanie układu zamkniętego. Porównać z
działaniem układu ciągłego.
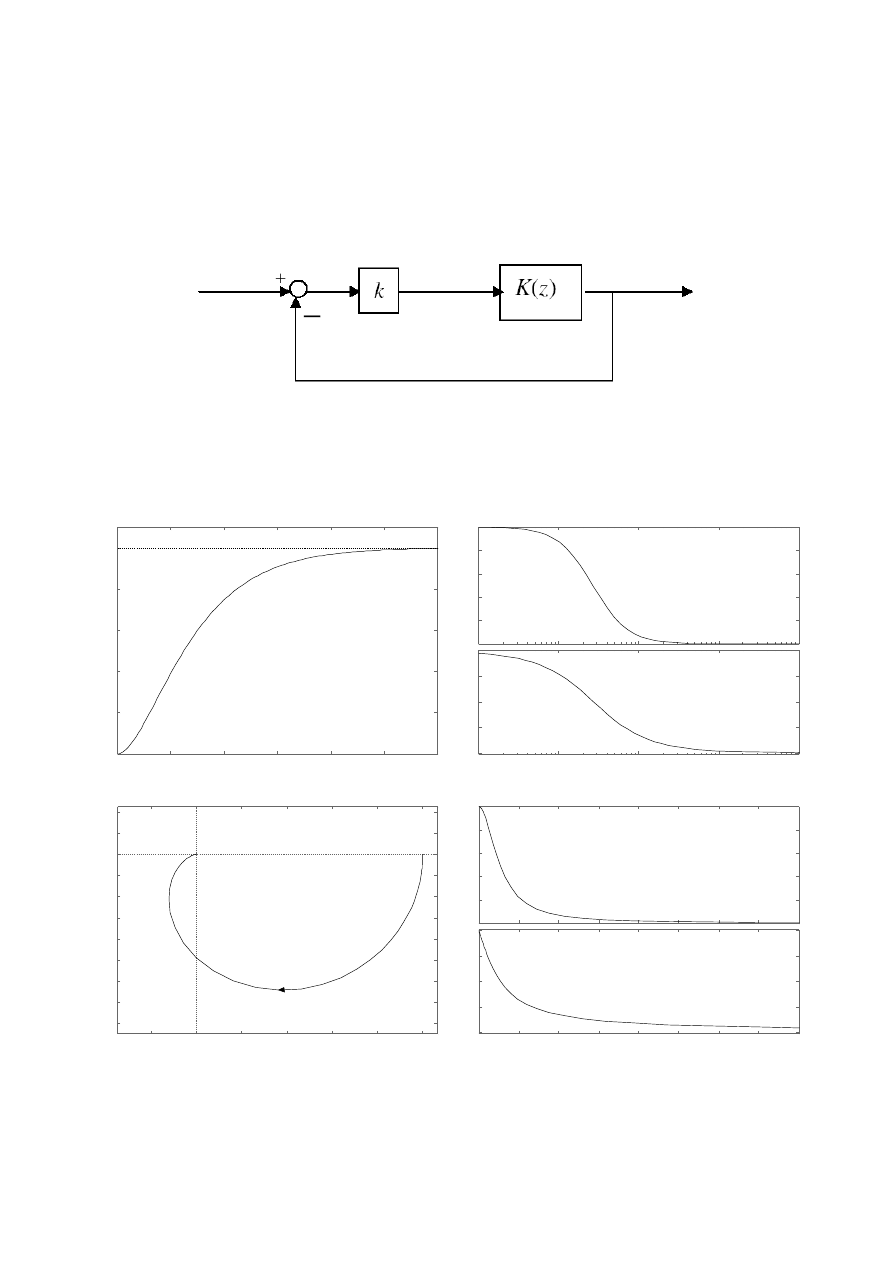
Rysunek 2. Schemat blokowy układu zamkniętego.
3. Analiza układu otwartego:
Ad 1. Przebiegi i charakterystyki dla obiektu ciągłego.
0
5
1 0
1 5
2 0
2 5
3 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
S t e p R e s p o n s e
T i m e ( s e c )
A
m
p
lit
u
d
e
0
0 . 2
0 . 4
0 . 6
0 . 8
1
M
a
g
n
it
u
d
e
(
a
b
s
)
1 0
- 2
1 0
- 1
1 0
0
1 0
1
1 0
2
- 1 8 0
- 1 3 5
- 9 0
- 4 5
0
P
h
a
s
e
(
d
e
g
)
B o d e D i a g r a m
F r e q u e n c y ( r a d / s e c )
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 0 . 8
- 0 . 7
- 0 . 6
- 0 . 5
- 0 . 4
- 0 . 3
- 0 . 2
- 0 . 1
0
0 . 1
0 . 2
N y q u i s t D i a g r a m
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
0 . 2
0 . 4
0 . 6
0 . 8
1
M
a
g
n
it
u
d
e
(
a
b
s
)
0
0 . 5
1
1 . 5
2
2 . 5
3
3 . 5
4
- 1 8 0
- 1 3 5
- 9 0
- 4 5
0
P
h
a
s
e
(
d
e
g
)
B o d e D i a g r a m
F r e q u e n c y ( r a d / s e c )
Ad 2.
●
Wyprowadzenie transmitancji zespolonej K(z) dla obiektu jak na rysunku 1, transmitancji
K(s) jak w punkcie 1 i okresie próbkowania T
i
= T
1
.
K s=
1−e
−
sT
i
s 1sT
1
1sT
2
=
1
s 1sT
1
1sT
2
−
e
−
sT
i
s 1sT
1
1sT
2
K t=
[
1−
T
2
T
2
−
T
1
e
−
t
T
2
T
1
T
2
−
T
1
e
−
t
T
1
]
⋅
1t −
[
1−
T
2
T
2
−
T
1
e
−
t−T
i
T
2
T
1
T
2
−
T
1
e
−
t −T
i
T
1
]
⋅
1t−T
i
K t=0=0 Spełniony warunek nieantycypacji.
A
1
=
T
1
T
2
−
T
1
A
2
=
T
2
T
2
−
T
1
K nT
i
=
[
1−A
2
e
−
nT
i
T
2
A
1
e
−
nT
i
T
1
]
⋅
1 nT
i
−
[
1− A
2
e
−
n−1T
i
T
2
A
1
e
−
n−1 T
i
T
1
]
⋅
1n−1T
i
D
1
=
e
−
T
i
T
1
D
2
=
e
−
T
i
T
2
K z =
z
z−1
−
A
2
z
z−D
2
A
1
z
z −D
1
−
1
z−1
A
2
z −D
2
−
A
1
z−D
1
K z =
A
1
z−1
z−D
1
−
A
2
z−1
z−D
2
K z =
A
1
z−1 z− D
2
−
A
2
z −1 z −D
1
z−D
1
z− D
2
z −D
1
z−D
2
K z =z
2
1 A
1
−
A
2
z A
2
−
A
1
D
1
A
2
−
1−D
2
A
1
1 D
1
D
2
A
1
D
2
−
A
2
D
1
A
1
−
A
2
=
T
1
T
2
−
T
1
−
T
2
T
2
−
T
1
=−
1
K z =
z 1 A
1
D
1
−
A
2
D
2
D
1
D
2
A
1
D
2
−
A
2
D
1
z −D
1
z −D
2
Ogólna postać transmitancji dyskretnej K(z):
K z =
1 A
1
D
1
−
A
2
D
2
z
D
1
D
2
A
1
D
2
−
A
2
D
1
1 A
1
D
1
−
A
2
D
2
z −D
1
z−D
2
gdzie :
A
1
=
T
1
T
2
−
T
1
; A
2
=
T
2
T
2
−
T
1
; D
1
=
e
−
T
i
T
1
; D
2
=
e
−
T
i
T
2
Podstawiając wartości liczbowe:
T
1
=
3 ; T
2
=
4,5 ; T
i
=
3
A
1
=
2 ; A
2
=
3 ;
D
1
=
0,3679 ; D
2
=
0,5134
K z =
0,1955 z 0,5732
z−0,3679 z −0,5134
Transmitancja została przedstawiona w takiej postaci ze względu na to, że jawnie można odczytać
wzmocnienie, bieguny i zera transmitancji.
●
Wzmocnienie: k = 0,1955
●
Zera:
z
1
= -0,5732
●
Bieguny:
b
1
= 0,3679; b
2
= 0,5134
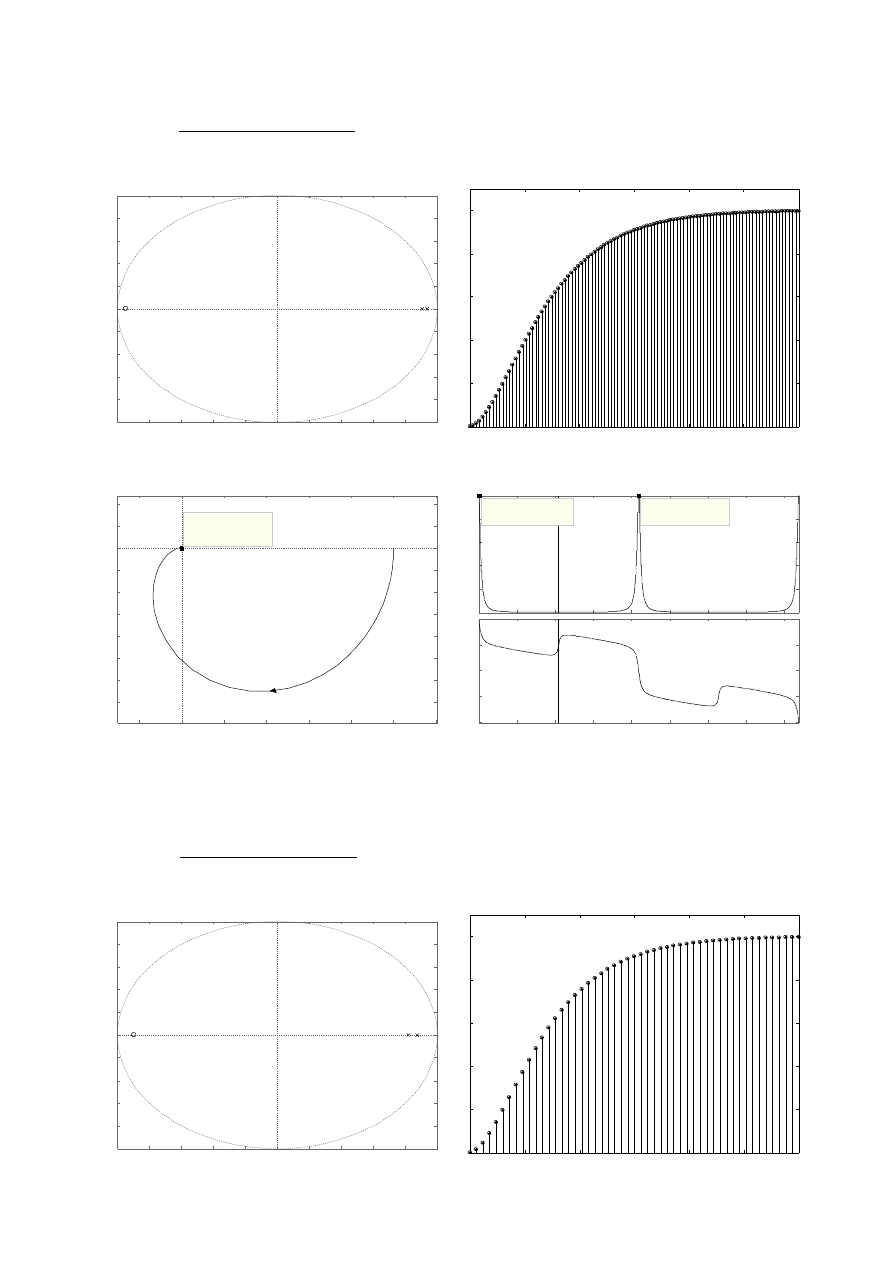
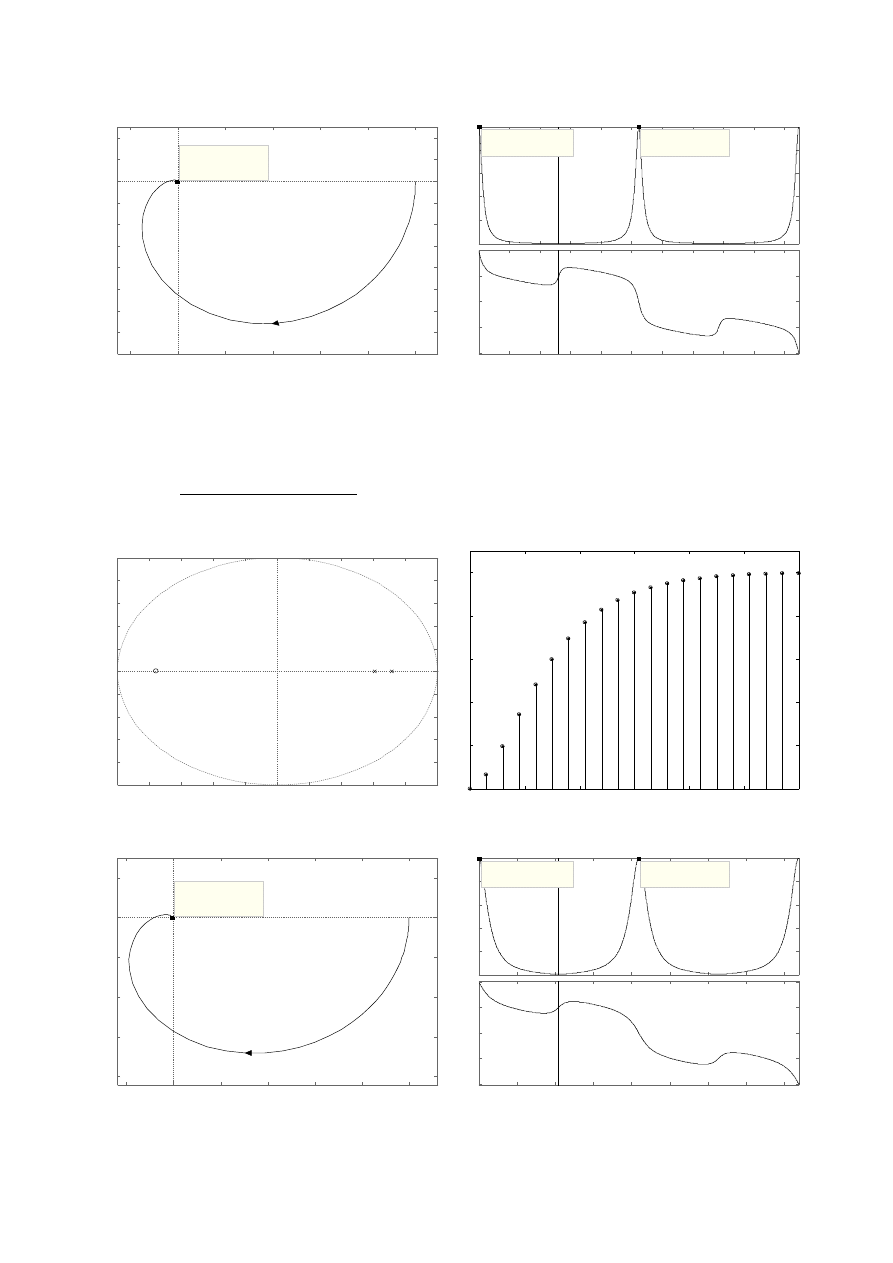
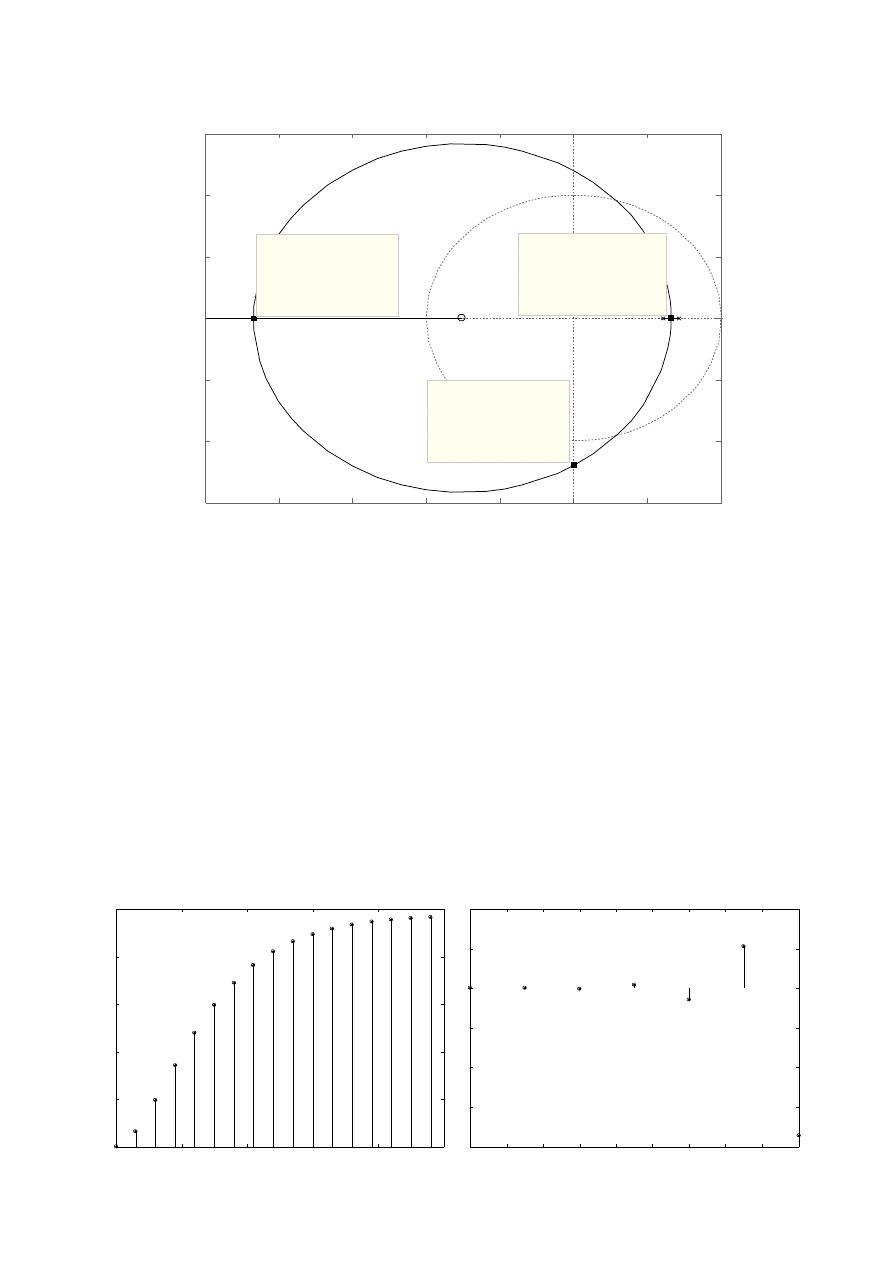
Ad 3.
T
i
= 0,1 T
1
= 0,3 s
a)
K z =
0.0031539 z0.946
z−0.9355 z −0.9048
b)
c)
d)
e)
ω
i
= 10,47 rad/s
M
max
= 1
M(ω
i
) = 46,2 · 10
-6
ω
1
= 0 rad/s; ω
2
= 20,9 rad/s; ω
3
= 41,9 rad/s;
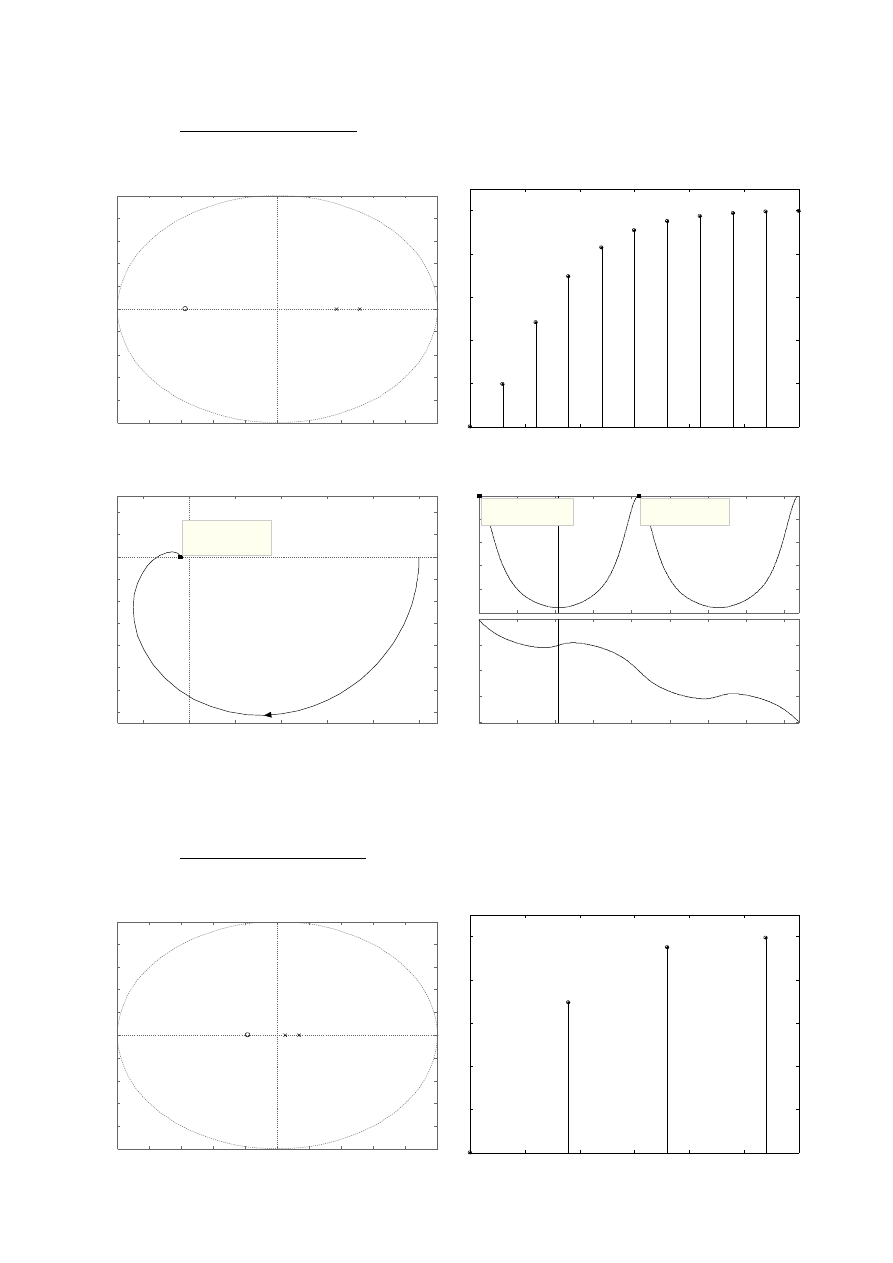
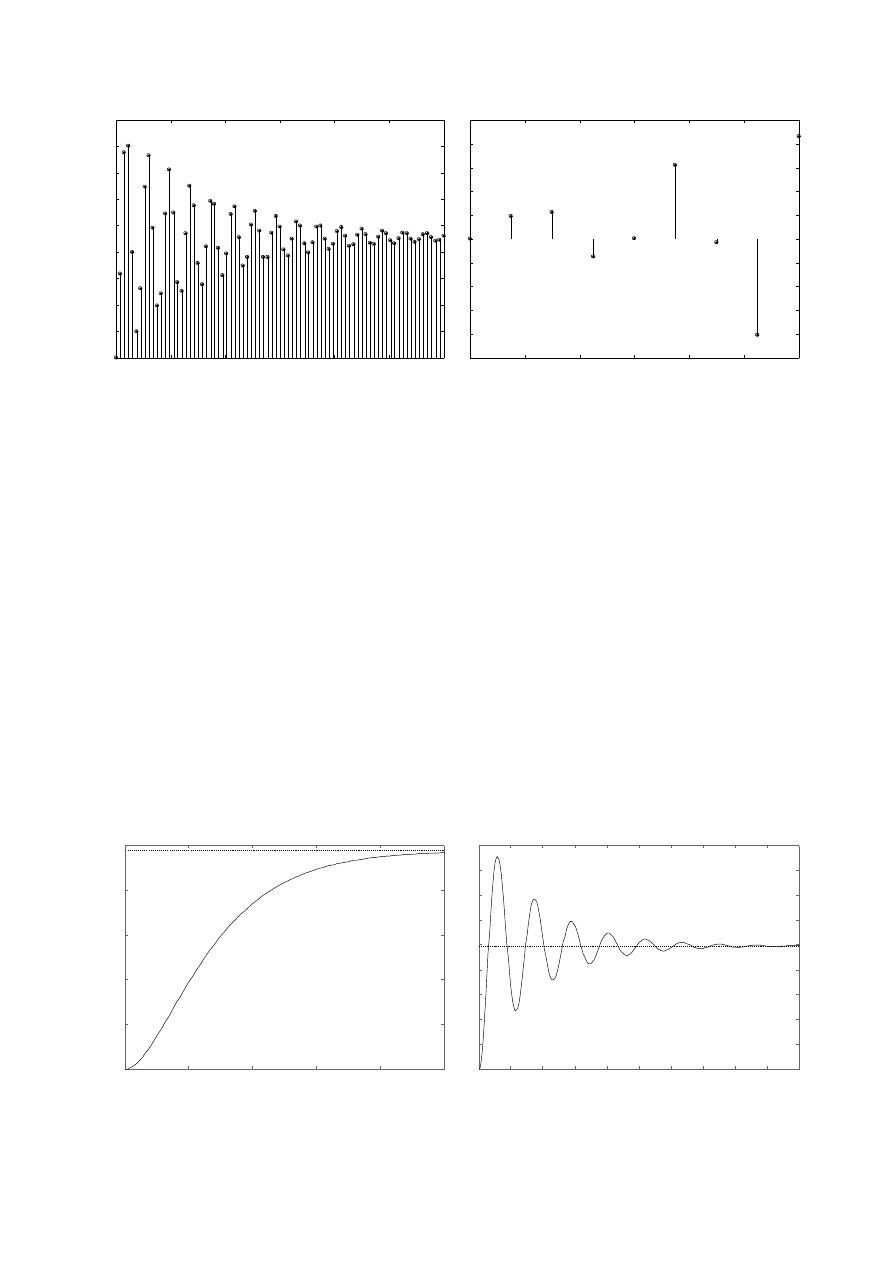
T
i
= 0,2 T
1
= 0,6 s
a)
K z =
0.011942 z0.8948
z −0.8752 z−0.8187
b)
c)
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
P o l e - Z e r o M a p
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
1 . 2
- 0 . 7
- 0 . 6
- 0 . 5
- 0 . 4
- 0 . 3
- 0 . 2
- 0 . 1
0
0 . 1
0 . 2
S y s t e m : G
R e a l : - 4 . 6 2 e - 0 0 5
I m a g : 9 . 7 e - 0 2 0
F r e q u e n c y ( r a d / s e c ) : 1 0 . 5
N y q u i s t D i a g r a m
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
5
1 0
1 5
2 0
2 5
3 0
3 5
4 0
- 7 2 0
- 5 4 0
- 3 6 0
- 1 8 0
0
P
h
a
s
e
(
d
e
g
)
0
0 . 2
0 . 4
0 . 6
0 . 8
1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 0 . 0 0 1
M a g n i t u d e ( a b s ) : 1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 2 0 . 9
M a g n i t u d e ( a b s ) : 1
M
a
g
n
it
u
d
e
(
a
b
s
)
B o d e D i a g r a m
F r e q u e n c y ( r a d / s e c )
0
5
1 0
1 5
2 0
2 5
3 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
T i m e ( s e c )
A
m
p
lit
u
d
e
S t e p R e s p o n s e
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
P o l e - Z e r o M a p
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
5
1 0
1 5
2 0
2 5
3 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
T i m e ( s e c )
A
m
p
lit
u
d
e
S t e p R e s p o n s e
d)
e)
ω
i
= 5,24 rad/s
M
max
= 1
M(ω
i
) = 36,8 · 10
-6
ω
1
= 0 rad/s; ω
2
= 10,5 rad/s; ω
3
= 20,9 rad/s;
T
i
= 0,5 T
1
= 1,5 s
a)
K z =
0.063467 z 0.7574
z −0.7165 z−0.6065
b)
c)
d)
e)
ω
i
= 2,09 rad/s
M
max
= 1
M(ω
i
) = 5,58 · 10
-3
ω
1
= 0 rad/s; ω
2
= 4,19 rad/s; ω
3
= 8,38 rad/s;
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 0 . 7
- 0 . 6
- 0 . 5
- 0 . 4
- 0 . 3
- 0 . 2
- 0 . 1
0
0 . 1
0 . 2
S y s t e m : G
R e a l : - 0 . 0 0 0 3 6 8
I m a g : 3 . 0 6 e - 0 1 8
F r e q u e n c y ( r a d / s e c ) : 5 . 2 4
N y q u i s t D i a g r a m
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
2
4
6
8
1 0
1 2
1 4
1 6
1 8
2 0
- 7 2 0
- 5 4 0
- 3 6 0
- 1 8 0
0
P
h
a
s
e
(
d
e
g
)
0
0 . 2
0 . 4
0 . 6
0 . 8
1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 0 . 0 0 1
M a g n i t u d e ( a b s ) : 1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 1 0 . 5
M a g n i t u d e ( a b s ) : 1
M
a
g
n
it
u
d
e
(
a
b
s
)
B o d e D i a g r a m
F r e q u e n c y ( r a d / s e c )
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
P o l e - Z e r o M a p
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
S y s t e m : G
R e a l : - 0 . 0 0 5 5 8
I m a g : 1 . 8 e - 0 1 8
F r e q u e n c y ( r a d / s e c ) : 2 . 0 9
N y q u i s t D i a g r a m
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
1
2
3
4
5
6
7
8
- 7 2 0
- 5 4 0
- 3 6 0
- 1 8 0
0
P
h
a
s
e
(
d
e
g
)
0
0 . 2
0 . 4
0 . 6
0 . 8
1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 0 . 0 0 1
M a g n i t u d e ( a b s ) : 1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 4 . 1 9
M a g n i t u d e ( a b s ) : 1
M
a
g
n
it
u
d
e
(
a
b
s
)
B o d e D i a g r a m
F r e q u e n c y ( r a d / s e c )
0
5
1 0
1 5
2 0
2 5
3 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
T i m e ( s e c )
A
m
p
lit
u
d
e
S t e p R e s p o n s e
T
i
= 1,0 T
1
= 3,0 s
a)
K z =
0.19551 z 0.5732
z −0.5134 z−0.3679
b)
c)
d)
e)
ω
i
= 1,05 rad/s
M
max
= 1
M(ω
i
) = 40,3 · 10
-3
ω
1
= 0 rad/s; ω
2
= 2,09 rad/s; ω
3
= 4,19 rad/s;
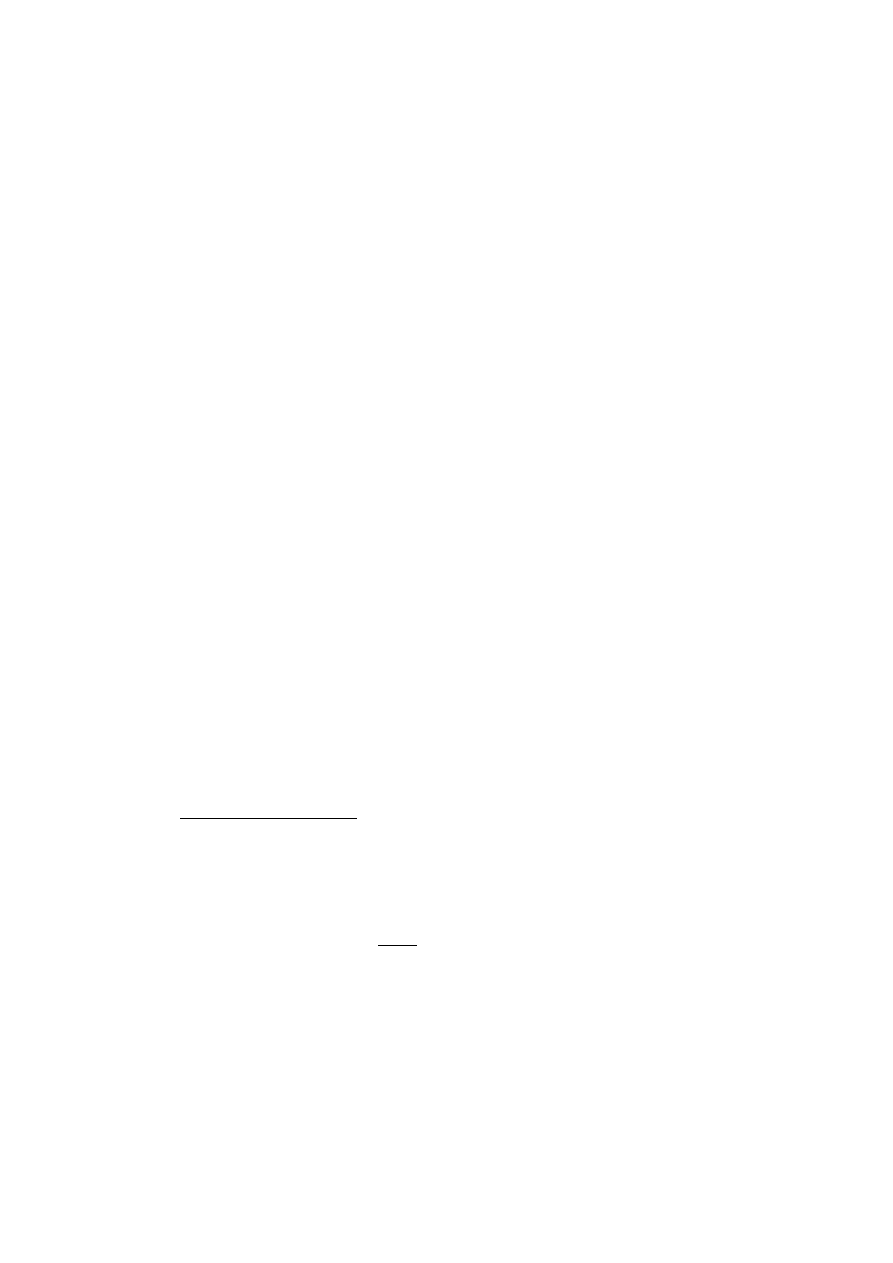
T
i
= 3,0 T
1
= 9,0 s
a)
K z =
0.69357 z 0.1846
z −0.1353 z−0.04979
b)
c)
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
P o l e - Z e r o M a p
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 0 . 7
- 0 . 6
- 0 . 5
- 0 . 4
- 0 . 3
- 0 . 2
- 0 . 1
0
0 . 1
0 . 2
S y s t e m : G
R e a l : - 0 . 0 4 0 3
I m a g : - 4 . 9 4 e - 0 1 8
F r e q u e n c y ( r a d / s e c ) : 1 . 0 5
N y q u i s t D i a g r a m
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
0 . 5
1
1 . 5
2
2 . 5
3
3 . 5
4
- 7 2 0
- 5 4 0
- 3 6 0
- 1 8 0
0
P
h
a
s
e
(
d
e
g
)
0
0 . 2
0 . 4
0 . 6
0 . 8
1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 0 . 0 0 1
M a g n i t u d e ( a b s ) : 1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 2 . 0 9
M a g n i t u d e ( a b s ) : 1
M
a
g
n
it
u
d
e
(
a
b
s
)
B o d e D i a g r a m
F r e q u e n c y ( r a d / s e c )
0
5
1 0
1 5
2 0
2 5
3 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
T i m e ( s e c )
A
m
p
lit
u
d
e
S t e p R e s p o n s e
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
P o l e - Z e r o M a p
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
5
1 0
1 5
2 0
2 5
3 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
T i m e ( s e c )
A
m
p
lit
u
d
e
S t e p R e s p o n s e
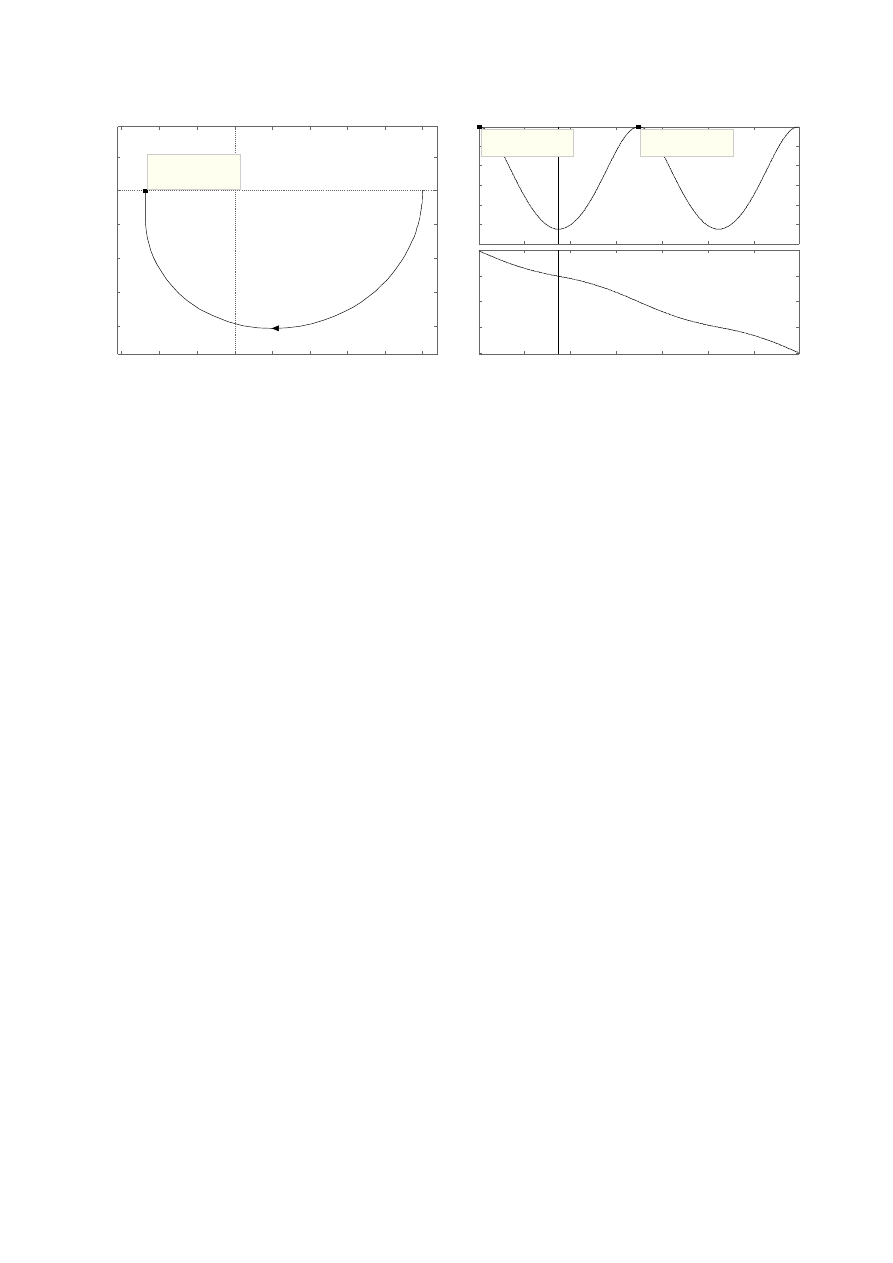
d)
e)
ω
i
= 0,35 rad/s
M
max
= 1
M(ω
i
) = 474 · 10
-3
ω
1
= 0 rad/s; ω
2
= 0,70 rad/s; ω
3
= 1,40 rad/s;
Ad 4. Wnioski:
●
Ze wzrostem okresu próbkowania zarówno bieguny jak i zera transmitancji K(z) zbliżają się
do centrum płaszczyzny z, to znaczy do punktu o współrzędnych (0,j0). Im mniejsza jest
wartość okresu próbkowania tym bliżej wrysowanego okręgu jednostkowego o środku w
punkcie o współrzędnych (0,j0) znajdują się zarówno zera jak i bieguny transmitancji K(z).
Zauważono również, że dla tak zdefiniowanej transmitancji K(z) zmienia się odległość
pomiędzy biegunami w taki sposób, że dla niskich wartości czasu próbkowania jest ona
stosunkowo mała i rośnie do pewnego momentu ze wzrostem tegoż okresu, a następnie
zaczyna maleć z dalszym wzrostem okresu próbkowania.
●
Ze wzrostem okresu próbkowania zmniejsza się gęstość izolowanych punktów odpowiedzi
skokowych. Jak widać dla bardzo małych wartości T
i
w porównaniu do najmniejszej stałej
czasowej części ciągłej układu próbkowanie jest tak gęste, że układ dyskretny zachowuje się
jak ciągły. Punkty izolowane odpowiedzi skokowych układu dyskretnego w każdym z
przypadków pokrywają się z punktami osobliwymi układu ciągłego dla tych chwil czasu w
których zachodzi próbkowanie.
●
Charakterystyka amplitudowo-fazowa dla małych wartości okresu próbkowania w stosunku
do najmniejszej stałej czasowej części ciągłej układu jest niemalże jednakowa z
charakterystyką nyquista obiektu ciągłego. Ze wzrostem okresu próbkowania maleje
pulsacja (częstotliwość) Nyquista i rośnie wartość modułu transmitancji przy tej pulsacji. W
pewnych granicach zaobserwowano że charakterystyka amplitudowo-fazowa przechodzi
przez ćwiartkę drugą płaszczyzny Nyquista. Oznacza to, że układzie dyskretnym występują
przesunięcia fazowe większe niż w układzie ciągłym. Przy dalszym wzroście powyżej
pewnej pulsacji nie obserwujemy już przejścia charakterystyki do ćwiartki drugiej. Dla
bardzo dużych wartości okresu próbkowania układ dyskretny ma zbliżoną charakterystykę
amplitudowo-fazową do przesuwnika-fazowego.
●
Na charakterystykach częstotliwościowych modułu i fazy widzimy również potwierdzenie
wniosku powyższego (fragment charakterystyk do pulsacji Nyquista oznaczonej pionową
linią). Charakterystyki te wykonano do wielokrotności pulsacji Nyquista w celu
zobrazowania błędnej interpretacji przez układ wymuszeń o wyższych częstotliwościach od
częstotliwości Nyquista. Mamy dla tych częstotliwości do czynienia ze zjawiskiem aliasingu
wynikającym z niespełnienia założenia twierdzenia Kotielnikowa-Shannona. Na tych
charakterystykach możemy doszukać się pewnych symetrii i na ich podstawie możemy
wnioskować, że aby zapewnić odpowiednie warunki pracy w układach dyskretnych
rzeczywistych powinno się do ich wejść podłączać filtry dolnoprzepustowe w celu
stłumienia wysokich harmonicznych sygnału dyskretyzowanego. Odpowiednie
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
S y s t e m : G
R e a l : - 0 . 4 7 4
I m a g : - 5 . 8 1 e - 0 1 7
F r e q u e n c y ( r a d / s e c ) : 0 . 3 4 9
N y q u i s t D i a g r a m
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
0 . 2
0 . 4
0 . 6
0 . 8
1
1 . 2
- 7 2 0
- 5 4 0
- 3 6 0
- 1 8 0
0
P
h
a
s
e
(
d
e
g
)
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 0 . 0 0 1
M a g n i t u d e ( a b s ) : 1
S y s t e m : G
F r e q u e n c y ( r a d / s e c ) : 0 . 6 9 6
M a g n i t u d e ( a b s ) : 1
M
a
g
n
it
u
d
e
(
a
b
s
)
B o d e D i a g r a m
F r e q u e n c y ( r a d / s e c )
charakterystyki częstotliwościowe dla układu ciągłego wskazują że układ ciągły nie może
odwrócić fazy sygnału poniżej -180
o
(-180
o
dla ω → ∞) i nie nadąża za sygnałami o
wysokich częstotliwościach M(∞) = 0. Fakt występowania w układzie dyskretnym
okresowego przebiegu M(ω) sprawia, że przy niekorzystnym warunkach (np. wymuszeniu
sinusoidalnym o pulsacji nieznacznie mniejszej od pulsacji Nyquista i zakłóceniu o
wysokiej częstotliwości ω
z
spełniającej równanie ω
z
= 2 · ω
i
· k, gdzie k wysoka liczba
naturalna) układ będzie działał w sposób błędny i niepożądany. W rzeczywistych układach
kiedy chcemy uzyskać zadowalające działanie układu konieczna jest praca w układzie
zamkniętym, a w szczególnych przypadkach stosowanie filtrów stroboskopowych.
●
Ze względu na przeprowadzone symulacje i uzyskane charakterystyki dla różnych wartości
okresu próbkowania za optymalną wartość przyjęto połowę najmniejszej stałej czasowej
części ciągłej układu (T
i opt
= 1,5 s). Wybór ten został dokonany na drodze kompromisów i
wynika z następujących faktów:
○
Położenie zera i biegunów transmitancji K(z) jest stosunkowo korzystne, to znaczy nie
leżą zbyt blisko okręgu jednostkowego ani w pobliżu jego środka.
○
Punkty izolowane odpowiedzi na skok jednostkowy obiektu o transmitancji K(z) nie są
zbyt gęsto usytuowane.
○
Charakterystyka amplitudowo-fazowa obiektu dyskretnego w znacznej części jest
zbliżona do charakterystyki amplitudowo-fazowej obiektu ciągłego.
○
Niska wartość moduł transmitancji K(z) dla pulsacji Nyquista.
○
Przesunięcie fazowe w niedużym przedziale jest mniejsze od -180
o
.
○
Stosunkowo dobra charakterystyka modułu od pulsacji (w przedziale pulsacji od 0 do
pulsacji Nyquista).
4. Analiza układu zamkniętego:
Ad 5.
●
Wyprowadzenie transmitancji zespolonej K(z) dla obiektu jak na rysunku 1, transmitancji
K(s) jak w punkcie 1 i okresie próbkowania T
i
= T
i opt
= 0,5 T
1
= 1,5 s.
Wykorzystując ogólną postać transmitancji dyskretnej K(z) (patrz punkt 2) i podstawieniu
odpowiednich wartości liczbowych otrzymujemy:
T
1
=
3 ; T
2
=
4,5 ; T
i
=
1,5
A
1
=
2 ;
A
2
=
3 ;
D
1
=
0,6065 ; D
2
=
0,7165
K z =
0,0635 z 0,7574
z −0,6065 z−0,7165
●
Wyznaczenie wzmocnienia granicznego układu:
Równanie charakterystyczne:
z−0,6065 z −0,7165k⋅0,0635 z 0,7574=0
z
2
z k⋅0,0635−1,3230 k⋅0,04810,4346=0
Podstawiamy:
z =
w1
w−1
w1
2
w1 w−1 k⋅0,0635−1,3230w−1
2
k⋅0,04810,4346=0
w
2
k⋅0,11160,1116w1,1308−k⋅0,09621,8884−k⋅0,1116=0
Stosując kryterium Hurwitza otrzymujemy następujące warunki:
k −1
k 11,7547
k 16,9211
Na podstawie uzyskanych warunków i założeniu k>0 uzyskujemy wartość k
gr
powyżej którego
układ jest niestabilny.
k
gr
11,7547
Ad 6.
Równanie charakterystyczne posiada:
a)
pierwiastki rzeczywiste dodatnie dla k 0,0336 ;
pierwiastki rzeczywiste ujemne dla
k 89,4
;
nie posiada pierwiastków rzeczywistych różnych znaków;
b)
pierwiastki zespolone o częściach rzeczywistych dodatnich dla
k 0,0336∩k 20,8
;
pierwiastki zespolone o częściach rzeczywistych ujemnych dla
k 20,8∩k 89,4
;
nie posiada pierwiastków zespolonych o częściach rzeczywistych różnych znaków.
Ad 7.
Wybrane wartości wzmocnień tak aby równanie charakterystyczne 1+K(z)=0 posiadało:
a) pierwiastki rzeczywiste dodatnie: k = 0,025;
b) pierwiastki rzeczywiste ujemne: k = 100;
c) pierwiastki zespolone o części rzeczywistej dodatniej: k = 10;
d) pierwiastki zespolone o części rzeczywistej ujemnej: k = 30.
a)
b)
- 2 . 5
- 2
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
S y s t e m : G o
G a i n : 8 9 . 4
P o l e : - 2 . 1 8
D a m p i n g : - 0 . 2 4
O v e r s h o o t ( % ) : 2 1 8
F r e q u e n c y ( r a d / s e c ) : 2 . 1 6
S y s t e m : G o
G a i n : 2 0 . 8
P o l e : 0 . 0 0 1 2 4 - 1 . 2 i
D a m p i n g : - 0 . 1 1 4
O v e r s h o o t ( % ) : 1 4 3
F r e q u e n c y ( r a d / s e c ) : 1 . 0 5
S y s t e m : G o
G a i n : 0 . 0 3 3 6
P o l e : 0 . 6 6 + 8 . 7 3 e - 0 0 9 i
D a m p i n g : 1
O v e r s h o o t ( % ) : 0
F r e q u e n c y ( r a d / s e c ) : 0 . 2 7 7
R o o t L o c u s
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
0
5
1 0
1 5
2 0
2 5
0
0 . 0 0 5
0 . 0 1
0 . 0 1 5
0 . 0 2
0 . 0 2 5
T i m e ( s e c )
A
m
p
li
tu
d
e
S t e p R e s p o n s e
0
1
2
3
4
5
6
7
8
9
- 4 0 0 0
- 3 0 0 0
- 2 0 0 0
- 1 0 0 0
0
1 0 0 0
2 0 0 0
T i m e ( s e c )
A
m
p
li
tu
d
e
S t e p R e s p o n s e
c)
d)
Wnioski:
W przypadku kiedy cały obszar takich nastaw, że równanie charakterystyczne posiada
dwa dodatnie pierwiastki rzeczywiste zawiera się w obszarze stabilnych nastaw, to dyskretny układ
zamknięty z regulatorem o tak dobranej nastawie będzie miał odpowiedź skokową aperiodyczną. W
naszym przypadku wzmocnienie regulatora jest niskie więc nawet w granicznym przypadku więc
uchyb regulacji w stanie ustalonym ma dużą wartość. Zaletą jest szybki czas regulacji.
W przypadku kiedy równanie charakterystyczne będzie posiadało pierwiastki zespolone
o części rzeczywistej dodatniej to dla naszego obiektu możemy wyróżnić dwa przypadki. Pierwszy
gdy nastawione wzmocnienie k jest mniejsze od wyznaczonego w punkcie 5 k
gr
, wówczas mamy do
czynienia z układem zamkniętym o periodycznym charakterze odpowiedzi skokowej, czas regulacji
jest dłuższy niż dla układu z równaniem charakterystycznym o dodatnich rzeczywistych
pierwiastkach, natomiast uchyb regulacji w stanie ustalonym ma stosunkowo małą wartość. W
drugim przypadku (k>k
gr
) nasz układ zamknięty jest niestabilny.
W pozostałych przypadkach (b i d) k>k
gr
czyli układ niestabilny.
Ad 8.
Dla wzmocnień jak w punkcie 7 – rozpatrujemy ciągły układ zamknięty:
a)
b)
0
2
4
6
8
1 0
1 2
- 1 0
- 8
- 6
- 4
- 2
0
2
4
6
8
1 0
T i m e ( s e c )
A
m
p
lit
u
d
e
S t e p R e s p o n s e
0
2 0
4 0
6 0
8 0
1 0 0
1 2 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
1 . 2
1 . 4
1 . 6
1 . 8
T i m e ( s e c )
A
m
p
lit
u
d
e
S t e p R e s p o n s e
0
5
1 0
1 5
2 0
2 5
0
0 . 0 0 5
0 . 0 1
0 . 0 1 5
0 . 0 2
0 . 0 2 5
S t e p R e s p o n s e
T i m e ( s e c )
A
m
p
li
tu
d
e
0
2
4
6
8
1 0
1 2
1 4
1 6
1 8
2 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
1 . 2
1 . 4
1 . 6
1 . 8
S t e p R e s p o n s e
T i m e ( s e c )
A
m
p
li
tu
d
e
c)
d)
Wnioski:
Jak zaobserwowano periodyczność pojawia się wówczas gdy wzmocnienie k
przekroczy wartość dla której rozwiązaniem równania charakterystycznego 1+K(z)=0 przestaną być
pierwiastki rzeczywiste dodatnie. Poniżej tej granicy zamknięty układ ciągły jest aperiodyczny. Ze
względu na to, że zamknięty układ ciągły jest stabilny strukturalnie wzmocnienie k możemy
dowolnie zwiększać. Ze wzrostem k dla zamkniętego układu ciągłego rośnie stopień
oscylacyjności, maleje uchyb regulacji w stanie ustalonym, czas regulacji jest w przybliżeniu stały.
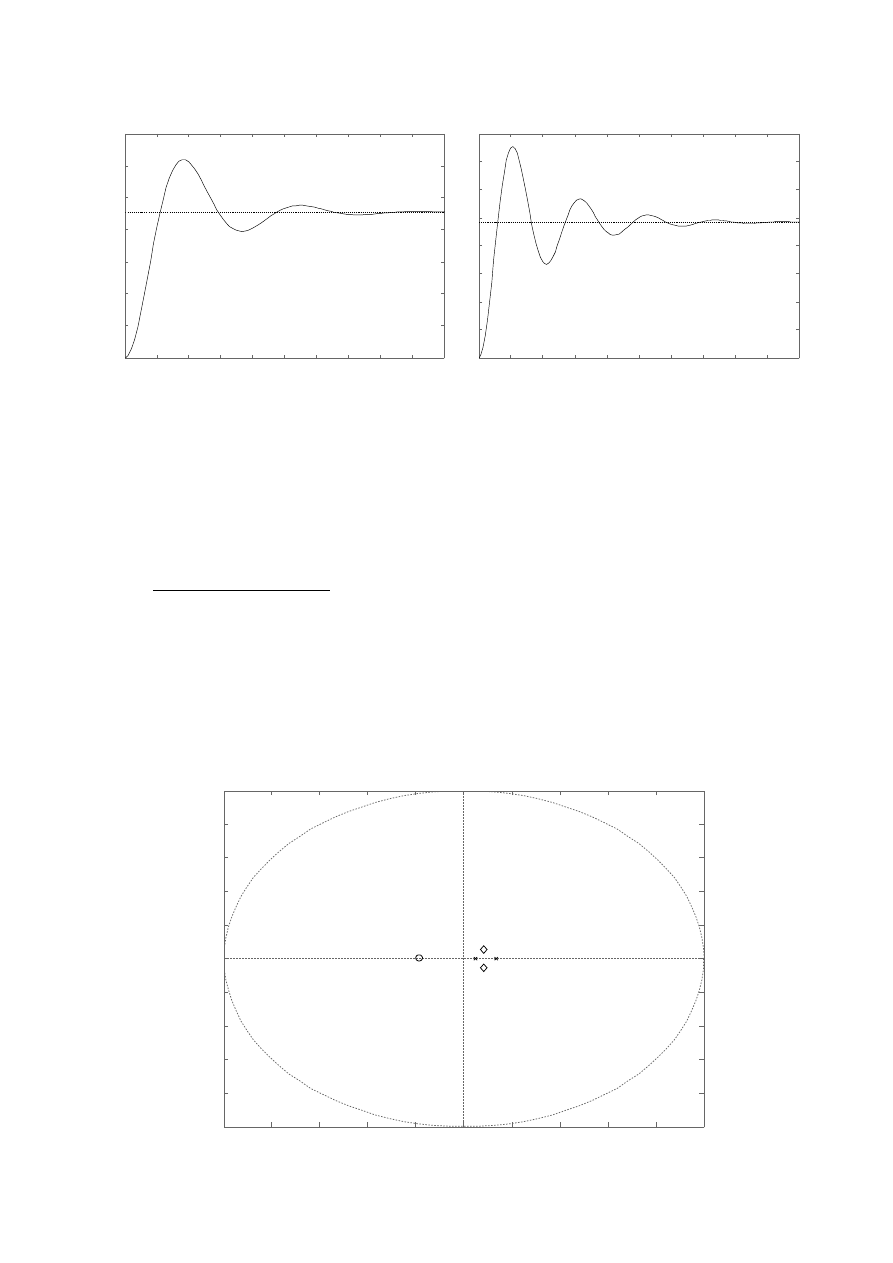
Ad 9.
Dla T
i
= 9 s:
K z =
0,6936 z 0,1846
z −0,0498 z−0,1353
k
gr
2,11
Ze względu na trudność w zobrazowaniu usytuowania pierwiastków dla tak dużego rozrzutu
wzmocnień przedstawiono tylko przypadek dla k = 0,025. Pozostałe pierwiastki odczytano z
wykresu w środowisku Matlab.
x – bieguny transmitancji K(z)
o – zero transmitancji K(z)
◊ – pierwiastki równania charakterystycznego dla danego wzmocnienia k.
0
2
4
6
8
1 0
1 2
1 4
1 6
1 8
2 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
1 . 2
1 . 4
S t e p R e s p o n s e
T i m e ( s e c )
A
m
p
lit
u
d
e
0
2
4
6
8
1 0
1 2
1 4
1 6
1 8
2 0
0
0 . 2
0 . 4
0 . 6
0 . 8
1
1 . 2
1 . 4
1 . 6
S t e p R e s p o n s e
T i m e ( s e c )
A
m
p
li
tu
d
e
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
R o o t L o c u s
R e a l A x i s
Im
a
g
in
a
ry
A
x
is
a) k = 0,025
z
1,2
= 0.0839 ± j0.0539
b) k = 100
z
1
= -69;
z
2
= -0,186
c) k = 10
z
1
= -6,55; z
2
= -0,196
d) k = 30
z
1
= -20,4; z
2
= -0,188
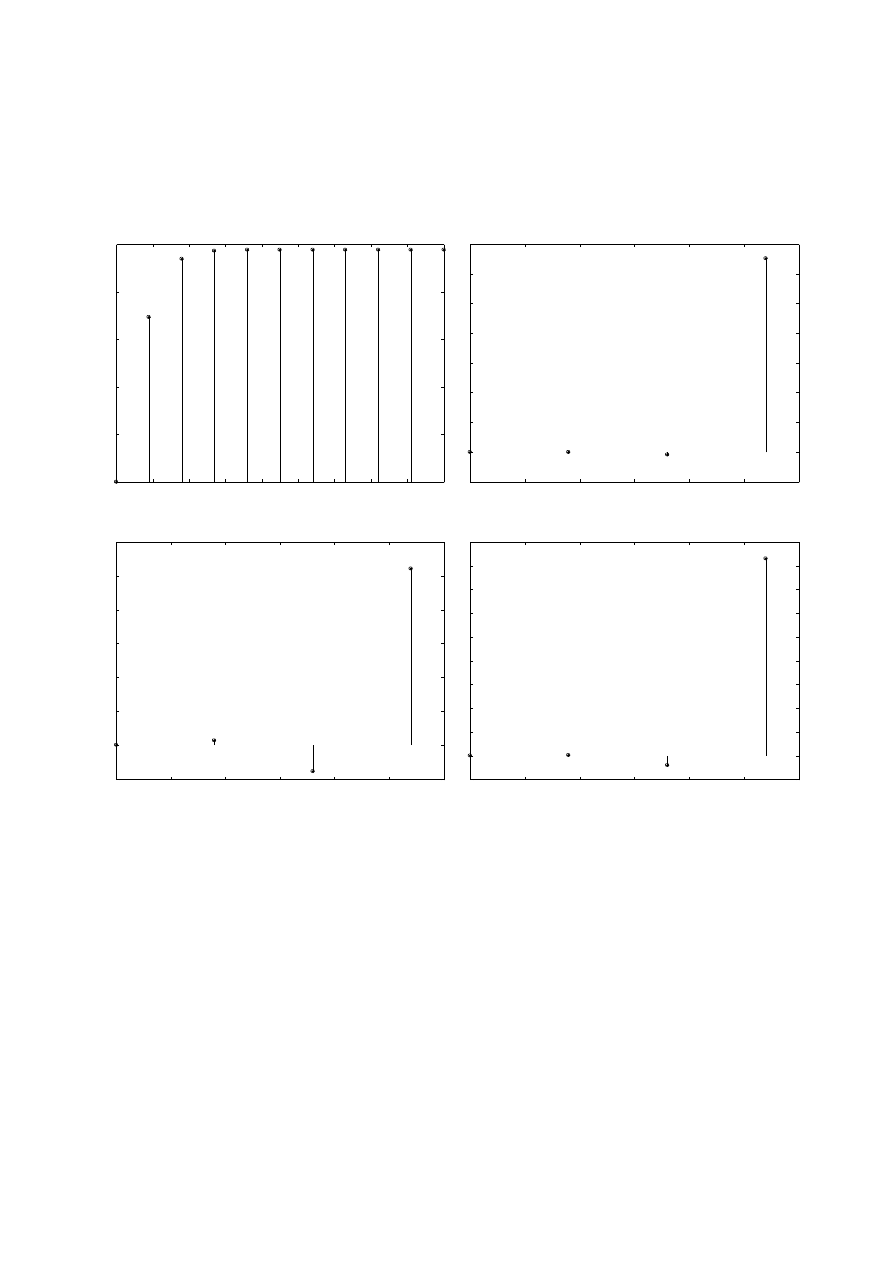
Odpowiedzi skokowe:
a)
b)
c)
d)
Wnioski:
Tylko w przypadku (a) k<k
gr
. Pomimo iż przebieg odpowiedzi skokowej w tym
przypadku nie wygląda na oscylacyjny to nieznaczne zwiększenie wartości wzmocnienia ujawnia
oscylacje. Teoretycznie uzyskany przebieg też powinien być oscylacyjny – być może doszło do
przekłamań numerycznych bądź błędów zaokrągleń. Wynika to z usytuowania pierwiastków a
mianowicie pierwiastki równania charakterystycznego 1+K(z)=0 są zespolone.
Ad 10.
Wnioski:
●
Dla bardzo małych okresów próbkowania transformata Z traci sens i należy w takim
wypadku potraktować, taki układ jako ciągły.
●
Dla bardzo dużych okresów próbkowania transformata Z zmierza do opóźnienia
dyskretnego.
●
Ze wzrostem T
i
maleje wzmocnienie graniczne k
gr
decydujące o stabilności układu.
●
Ze wzrostem T
i
maleje częstotliwość Nyquista.
●
Ze wzrostem T
i
maleją graniczne wartości przedziałów dla których pierwiastki są
określonego typu (rzeczywiste, zespolone i ich znaki).
●
Ze wzrostem T
i
wzrasta stopień oscylacyjności układu.
0
1 0
2 0
3 0
4 0
5 0
6 0
7 0
8 0
9 0
0
0 . 0 0 5
0 . 0 1
0 . 0 1 5
0 . 0 2
0 . 0 2 5
T i m e ( s e c )
A
m
p
li
tu
d
e
S t e p R e s p o n s e
0
5
1 0
1 5
2 0
2 5
3 0
- 0 . 5
0
0 . 5
1
1 . 5
2
2 . 5
3
3 . 5
x 1 0
5
T i m e ( s e c )
A
m
p
li
tu
d
e
S t e p R e s p o n s e
0
5
1 0
1 5
2 0
2 5
3 0
- 5 0
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
T i m e ( s e c )
A
m
p
lit
u
d
e
S t e p R e s p o n s e
0
5
1 0
1 5
2 0
2 5
3 0
- 1 0 0 0
0
1 0 0 0
2 0 0 0
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
T i m e ( s e c )
A
m
p
li
tu
d
e
S t e p R e s p o n s e
Document Outline
Wyszukiwarka
Podobne podstrony:
Ćw 6 Regulacja PID
Regulacja oddychania w czasie wysilku fizycznego, BILOGIA, FIZJOLOGIA CZŁOWIEKA
cw 4 Regulacja gospodarki wapniowo fosforanowej
Badanie dyskretnego w czasie UAR Teoria ster 5
5 Dyskretne układy regulacji, rozdział 7 Struktury regulatorów dyskretnych
14 Układy liniowe dyskretne w czasie
Ćw 6 Regulacja PID
4 Dyskretne uklady regulacji, Nieznany (2)
cw 7 porownanie metod sterowania i regulacji
cw 7?danie ukladow regulacji dwupolozeniowej
cw 7 Dyskretna Transformata Fouriera (DFT)
5 Dyskretne uklady regulacji, Nieznany (2)
Cw 10 Uklad regulacyjny stabili Nieznany
SYM T 27-01.DOC, MODELOWANIE CIĄGŁYCH I DYSKRETNYCH UKŁADÓW REGULACJI
cwiczenie 4 modelowanie dyskretnych ukladów regulacji
Cw 10 Uklad regulacyjny stabilizatora
Ćw. nr 1 - Układ regulacji natężenia prądu, Ćw. nr 1 - Układ regulacji natężenia prądu
Technika Regulacji CW NR8
więcej podobnych podstron