
POLITECHNIKA WARSZAWSKA
Wydział Samochodów i Maszyn Roboczych
Modelowanie komputerowe w praktyce
Inżynierskiej
„Symulacja drgań układu mechanicznego”
Wykonał:
Arkadiusz Kubik
Numer albumu: 257462
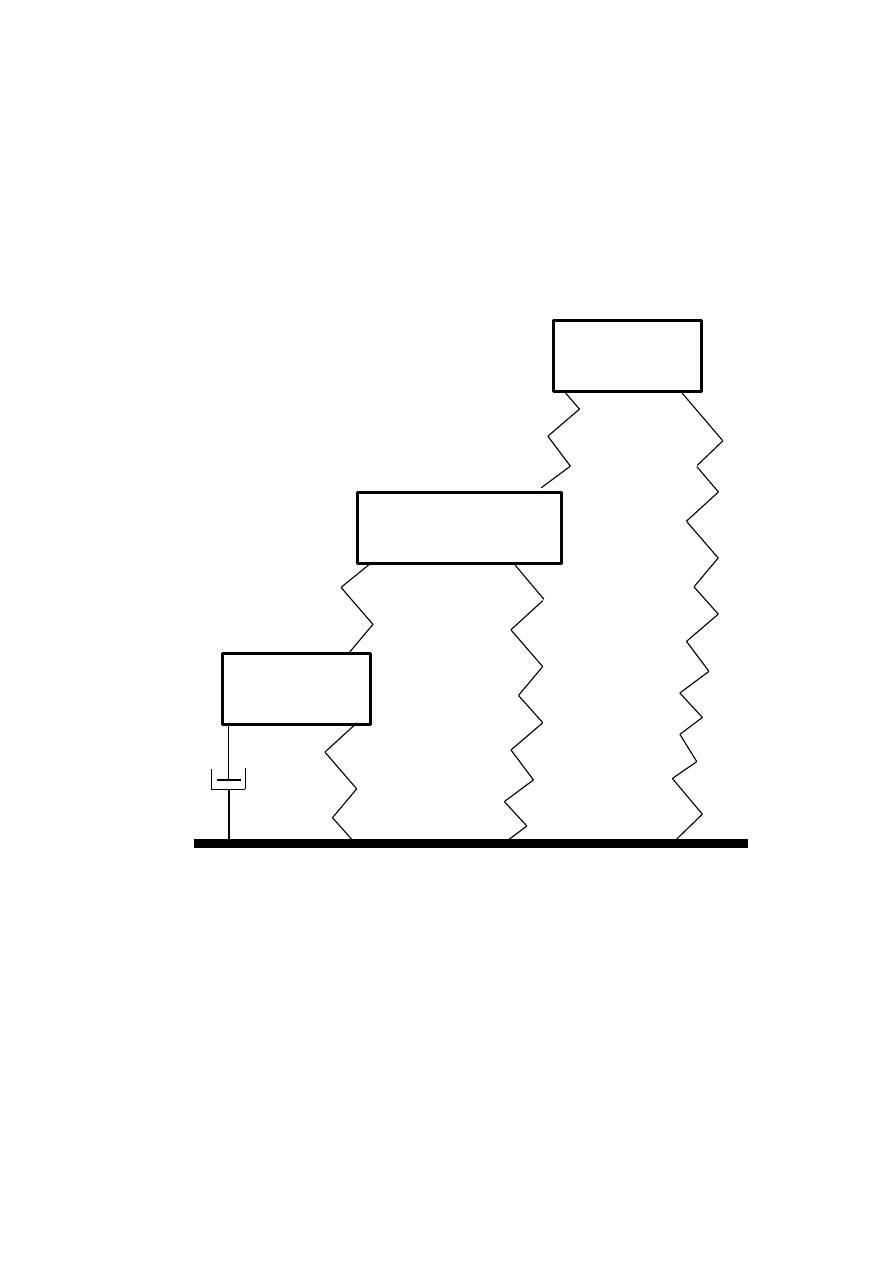
1. Schemat układu
Układ składa się z trzech mas, pięciu sprężyn oraz jednego tłumika,
rozmieszczenie elementów ilustruje poniższy rysunek:
2. Macierze sztywności, mas i tłumienia
Macierz sztywności K:
[
]
m
3
m
2
m
1
k
5
k
4
k
3
k
2
k
1
c

Ponieważ nie ma przemieszczeń podłoża, można wykreślić pierwszy
wiersz i pierwszą kolumnę. Wówczas:
[
]
Macierz tłumienia C:
[
]
Macierz mas M:
[
]
3. Dane
k
1
= 4 N/m
k
2
= 5 N/m
k
3
= 2 N/m
k
4
= 3 N/m
k
5
= 1 N/m
m
1
= 6 kg
m
2
= 13 kg
m
3
= 4 kg
Warunki początkowe:
x
1
=0 x
2
=0
x
3
=0
x
1
’=0 x
2
’=10 m/s x
3
’=0
krok dt=0,1 s
4. Rozwiązanie
Symulację przeprowadzono w programie Scilab.
Tłumienie układu otrzymamy z tłumienia Rayleigh’a:
C= α *M+β*K, gdzie α,β ϵ<0,001; 0,5>
Macierze K i M z uwzględnieniem danych wynoszą:
[
]
[
]
Rozwiązanie zadania w programie Scilab
//Obliczanie amplitud drgań układu
yy1
=
(
0
)
, yy2
=
(
0
)
, yy3
=
(
0
)
K
=
[[
9
,
-
5
,
0
]
;
[
-
5
,
10
,
-
3
]
;
[
0
,
-
3
,
4
]]
//macierz sztywności
M
=
[[
6
,
0
,
0
]
;
[
0
,
13
,
0
]
;
[
0
,
0
,
4
]]
//macierz mas
y1
=
[
0
,
0
,
0
]
'
, y2
=
[
0
,
1
,
0
]
'
h
=
0.1
, tmax
=
100
a
=
0.05
//współczynnik alfa
b
=
0.02
//współczynnik beta
F
=
0
C
=
a
*
M
+
b
*
K
// wzór Raileygh'a
t
=
h
:
h
:
tmax
for
j
=
1
:
tmax
/
h
y3
=
((
M
+
0.5
*
h
*
C
)
^-
1
)
*
(
F
*
(
h
^
2
)
+
(
2
*
M
-
K
*
(
h
^
2
))
*
y2
+
(
C
*
h
*
0.5
-
M
)
*
y1
)
y1
=
y2, y2
=
y3
yy1
(
j
)
=
y2
(
1
)
, yy2
(
j
)
=
y2
(
2
)
, yy3
(
j
)
=
y2
(
3
)
end
clf
plot2d
(
t,yy1
)
,
plot
(
t,yy2,
'b'
)
,
plot
(
t,yy3,
'g'
)
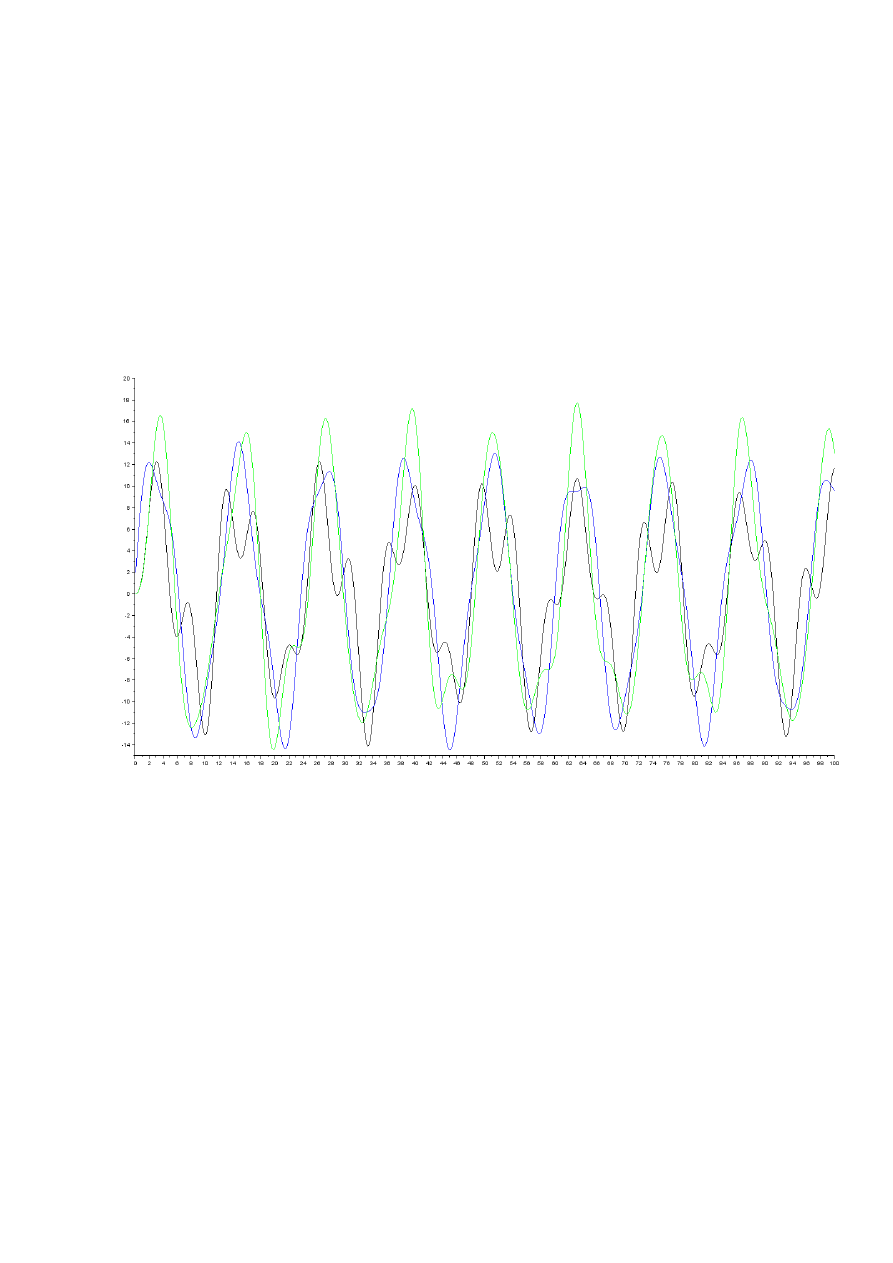
5. Wykresy
Na wykresach przedstawiono amplitudy wychyleń poszczególnych mas
układu, gdzie: kolor czarny – m
1
, zielony - m
2
, niebieski – m
3
dla α =0,001; β=0,001
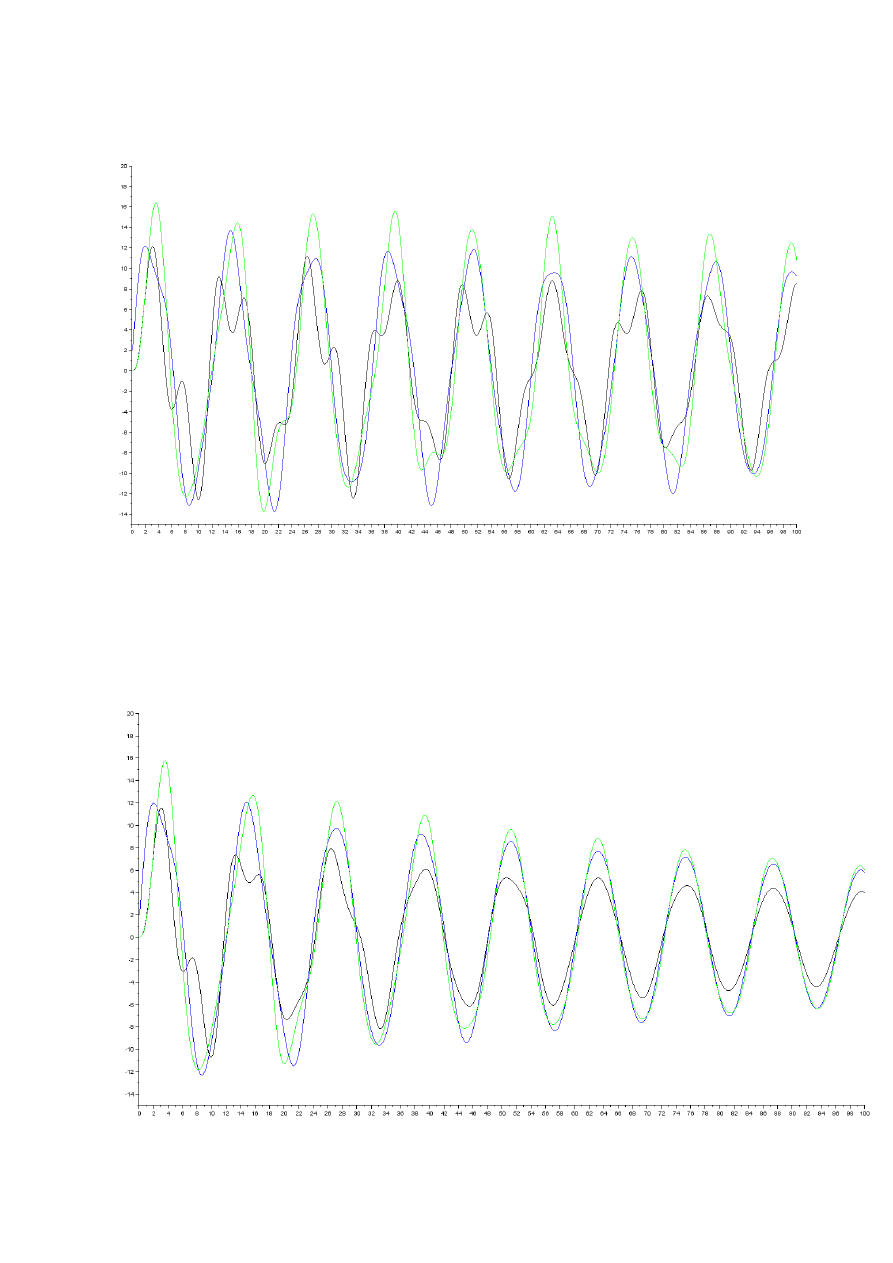
dla α =0,001; β=0,01
dla α =0,001; β=0,05
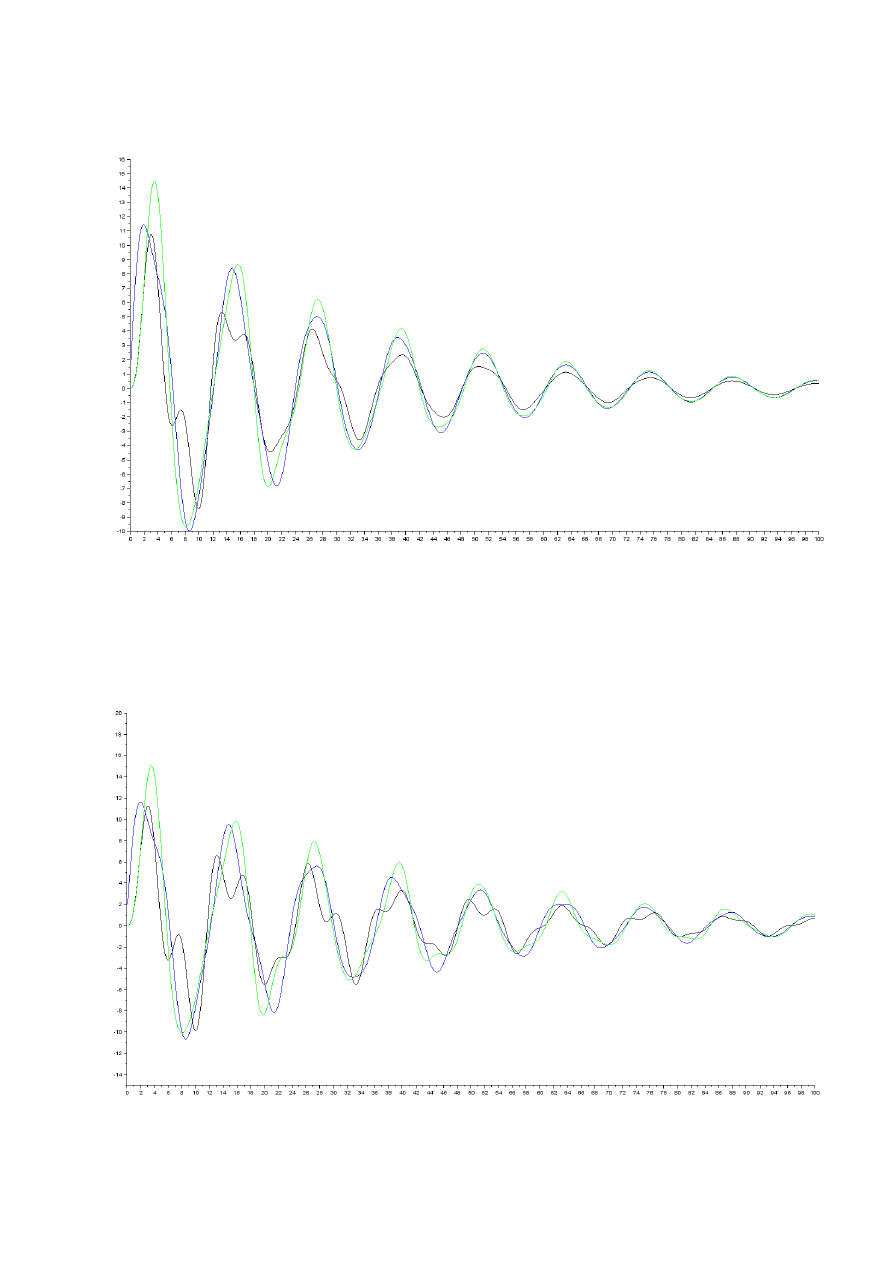
dla α =0,05; β=0,05
dla α =0,05; β=0,01
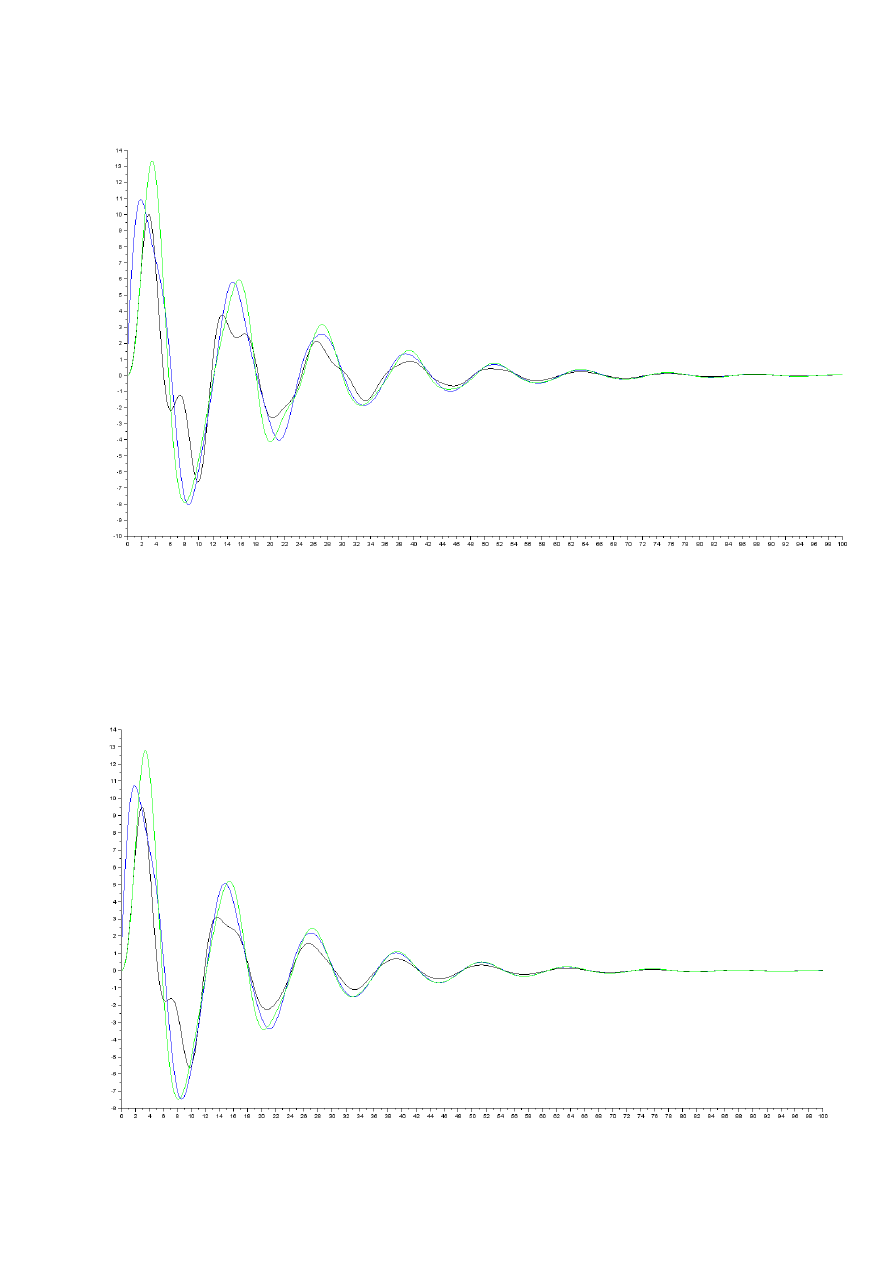
dla α =0,1; β=0,05
dla α =0,1; β=0,1
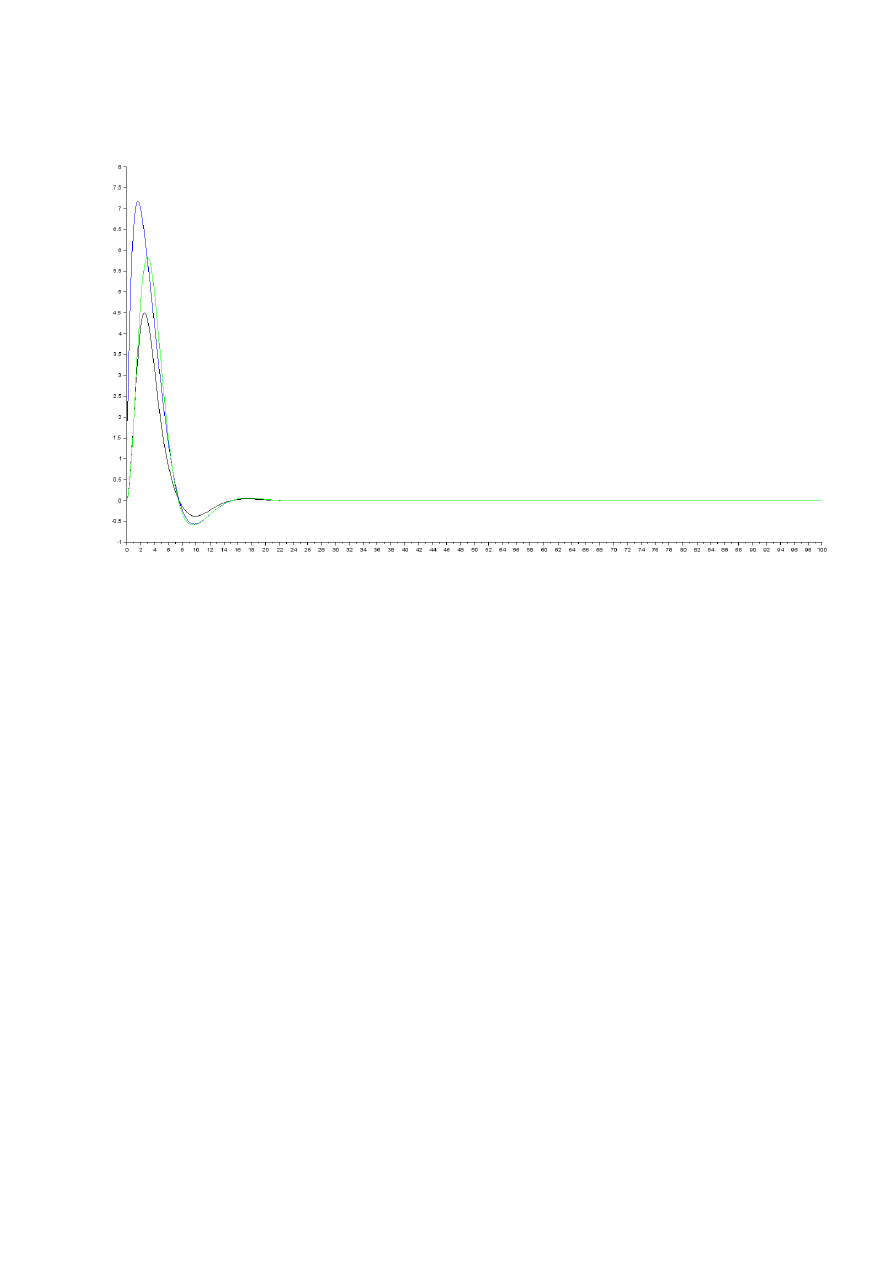
dla α =0,5; β=0,5
6. Wnioski i spostrzeżenia
Można zauważyć, że zwiększenie parametru α powoduje zwiększenie
szybkości tłumienia drgań, zaś parametr β pozwala na zmniejszenie
różnic w amplitudach drgań poszczególnych mas. Za taki stan
odpowiadają przyjęte wartości danych oraz zależność, z której została
obliczona macierz tłumienia.
Wyszukiwarka
Podobne podstrony:
Karol Sapieha mgr praca domowa modelowanie komputerowe w praktyce in ynierskiej
praca domowa stropy stacjonarne
Praca domowa 2a Analiza Matematyczna
cwiczenia 2 25.10.2007 praca domowa, cwiczenia - dr januszkiewicz
PRACA DOMOWA UCZNIA, kształcenie zintegrowane
Praca domowa-rzeczoznawca, PRAWO ADMINISTRACYJNE, ćwiczenia
PRACA DOMOWA Prawo Administracyjne, PRAWO ADMINISTRACYJNE, ćwiczenia
Rachunkowość Finansowa wykłady praca domowa
praca domowa nr 2
Praca domowa 3 OgarnijTemat com
Java praca domowa 10
praca domowa1
praca domowa angol
MSS Praca domowa nr 1
Praca domowa z metrologii, Sprawdzian szczękowy do wałka 66g6
Java praca domowa 05
Praca domowa nr 2
5 granice praca domowa
więcej podobnych podstron