An
Extensible
SA
T-solv
er
[extended
v
ersion
1.2℄
Niklas
E
en,
Niklas
S
orensson
Chalmers
Univ
ersit
y
of
T
e
hnology
,
Sw
eden
feen,nikgs.halmers.se
Abstrat.
In
this
artile,
w
e
presen
t
a
small,
omplete,
and
eÆien
t
SA
T-solv
er
in
the
st
yle
of
onit-driv
en
learning,
as
exemplied
b
y
C
HA FF
.
W
e
aim
to
giv
e
suÆien
t
details
ab
out
implemen
tation
to
enable
the
reader
to
onstrut
his
or
her
o
wn
solv
er
in
a
v
ery
short
time.
This
will
allo
w
users
of
SA
T-solv
ers
to
mak
e
domain
sp
ei
extensions
or
adaptions
of
urren
t
state-of-the-art
SA
T-te
hniques,
to
meet
the
needs
of
a
partiular
appliation
area.
The
presen
ted
solv
er
is
designed
with
this
in
mind,
and
inludes
among
other
things
a
me
hanism
for
adding
arbitrary
b
o
olean
onstrain
ts.
It
also
supp
orts
solving
a
series
of
related
SA
T-problems
eÆien
tly
b
y
an
inremen
tal
SA
T-in
terfae.
1
In
tro
dution
The
use
of
SA
T-solv
ers
in
v
arious
appliations
is
on
the
mar
h.
As
insigh
t
on
ho
w
to
eÆien
tly
eno
de
problems
in
to
SA
T
is
inreasing,
a
gro
wing
n
um
b
er
of
prob-
lem
domains
are
suessfully
b
eing
ta
kled
b
y
SA
T-solv
ers.
This
is
partiularly
true
for
the
ele
tr
oni
design
automation
(ED
A)
industry
[BCCFZ99
,Lar92
℄.
The
suess
is
further
magnied
b
y
urren
t
state-of-the-art
solv
ers
b
eing
ex-
tended
and
adapted
to
meet
the
sp
ei
harateristis
of
these
problem
domains
[ARMS02,ES03
℄.
Ho
w
ev
er,
mo
difying
an
existing
solv
er,
ev
en
with
a
thorough
understanding
of
b
oth
the
problem
domain
and
of
mo
dern
SA
T-te
hniques,
an
b
eome
a
time
onsuming
and
b
ewildering
journey
in
to
the
m
ysterious
inner
w
orkings
of
a
ten-
thousand-line
soft
w
are
pa
k
age.
Lik
ewise,
writing
a
solv
er
from
srat
h
an
also
b
e
a
daun
ting
task,
as
there
are
n
umerous
pitfalls
hidden
in
the
in
triate
details
of
a
orret
and
eÆien
t
solv
er.
The
problem
is
that
although
the
te
hniques
used
in
a
mo
dern
SA
T-solv
er
are
w
ell
do
umen
ted,
the
details
neessary
for
an
implementation
ha
v
e
not
b
een
adequately
presen
ted
b
efore.
In
the
fall
of
2002,
the
authors
implemen
ted
the
solv
ers
S
ATZOO
and
S
AT
-
NIK
.
In
order
to
suÆien
tly
understand
the
implemen
tation
tri
ks
needed
for
a
mo
dern
SA
T-solv
er,
it
w
as
neessary
to
onsult
the
soure-o
de
of
previous
im-
plemen
tations.
1
W
e
nd
that
the
material
on
tained
therein
an
b
e
made
more
aessible,
whi
h
is
desirable
for
the
SA
T-omm
unit
y
.
Th
us,
the
prinipal
goal
of
this
artile
is
to
bridge
the
gap
b
et
w
een
existing
desriptions
of
SA
T-te
hniques
and
their
atual
implemen
tation.
W
e
will
do
this
b
y
presen
ting
the
o
de
of
a
minimal
SA
T-solv
er
M
INI
S
AT
,
based
on
the
ideas
for
onit-driv
en
ba
ktra
king
[MS96
℄,
together
with
w
at
hed
literals
and
dynami
v
ariable
ordering
[MZ01
℄.
The
original
C++
soure
o
de
1
L
IM M AT
at
http://www.inf.ethz.h/perso nal/ bier e/pro jet s/lim mat/
Z
C
HA FF
at
http://www.ee.prineton.edu/~
h aff/z haf f
(do
wnloadable
from
http://www.s.h
al
mer
s.
se/
~
e
en
)
for
M
INI
S
AT
is
under
600
lines
(not
oun
ting
ommen
ts),
and
is
the
result
of
rethinking
and
simplifying
the
designs
of
S
ATZOO
and
S
ATNIK
without
sariing
eÆieny
.
W
e
will
presen
t
all
the
relev
an
t
parts
of
the
o
de
in
a
manner
that
should
b
e
aessible
to
an
y
one
aquain
ted
with
either
C++
or
Ja
v
a.
The
presen
ted
o
de
inludes
an
inremen
tal
SA
T-in
terfae,
whi
h
allo
ws
for
a
series
of
related
problems
to
b
e
solv
ed
with
p
oten
tially
h
uge
eÆieny
gains
[ES03
℄.
W
e
also
generalize
the
expressiv
eness
of
the
SA
T-problem
form
ulation
b
y
pro
viding
a
me
hanism
for
arbitrary
onstr
aints
o
v
er
b
o
olean
v
ariables
to
b
e
dened.
P
aragraphs
disussing
implemen
tation
alternativ
es
are
mark
ed
\[Dis-
ussion℄"
and
an
b
e
skipp
ed
on
a
rst
reading.
F
rom
the
do
umen
tation
in
this
pap
er
w
e
hop
e
it
is
p
ossible
for
you
to
implemen
t
a
fresh
SA
T-solv
er
in
y
our
fa
v
orite
language,
or
to
grab
the
C++
v
ersion
of
M
INI
S
AT
from
the
net
and
start
mo
difying
it
to
inlude
new
and
in
teresting
ideas.
2
Appliation
Programming
In
terfae
W
e
start
b
y
presen
ting
M
INI
S
AT
's
external
in
terfae,
with
whi
h
a
user
appli-
ation
an
sp
eify
and
solv
e
SA
T-problems.
A
basi
kno
wledge
ab
out
SA
T
is
assumed
(see
for
instane
[MS96
℄).
The
t
yp
es
var
,
lit
,
and
V
e
for
v
ariables,
literals,
and
v
etors
resp
etiv
ely
are
explained
in
detail
in
setion
4.
lass
Solver
{
Publi
interfa
e
var
newV
ar
()
b
o
ol
addClause
(V
e
hlit
i
literals)
b
o
ol
add:
:
:
(:
:
:)
b
o
ol
simplifyDB
()
b
o
ol
solve
(V
e
hlit
i
assumptions)
V
e
hb
o
ol
i
mo
del
{
If
found,
this
ve
tor
has
the
mo
del.
The
\add
:
:
: "
metho
d
should
b
e
understo
o
d
as
a
plae-holder
for
additional
onstrain
ts
implemen
ted
in
an
extension
of
M
INI
S
AT
.
F
or
a
standard
SA
T-problem,
the
in
terfae
is
used
in
the
follo
wing
w
a
y:
V
ari-
ables
are
in
tro
dued
b
y
alling
newV
ar().
F
rom
these
v
ariables,
lauses
are
built
and
added
b
y
addClause().
T
rivial
onits,
su
h
as
t
w
o
unit
lauses
fxg
and
fxg
b
eing
added,
an
b
e
deteted
b
y
addClause(),
in
whi
h
ase
it
returns
F
alse.
F
rom
this
p
oin
t
on,
the
solv
er
state
is
undened
and
m
ust
not
b
e
used
further.
If
no
su
h
trivial
onit
is
deteted
during
the
lause
insertion
phase,
solve()
is
alled
with
an
empt
y
list
of
assumptions.
It
returns
F
alse
if
the
problem
is
unsatisable,
and
Tr
ue
if
it
is
satisable,
in
whi
h
ase
the
mo
del
an
b
e
read
from
the
publi
v
etor
\mo
del".
The
simplifyDB()
metho
d
an
b
e
used
b
efore
alling
solve()
to
simplify
the
set
of
problem
onstrain
ts
(often
alled
the
onstr
aint
datab
ase
).
In
our
imple-
men
tation,
simplifyDB()
will
rst
propagate
all
unit
information,
then
remo
v
e
all
satised
onstrain
ts.
As
for
addClause(),
the
simplier
an
sometimes
detet
a
2

onit,
in
whi
h
ase
F
alse
is
returned
and
the
solv
er
state
is,
again,
undened
and
m
ust
not
b
e
used
further.
If
the
solv
er
returns
satisable,
new
onstrain
ts
an
b
e
added
rep
eatedly
to
the
existing
database
and
solve()
run
again.
Ho
w
ev
er,
more
in
teresting
sequenes
of
SA
T-problems
an
b
e
solv
ed
b
y
the
use
of
unit
assumptions.
When
passing
a
non-empt
y
list
of
assumptions
to
solve(),
the
solv
er
temp
orarily
assumes
the
literals
to
b
e
true.
After
nding
a
mo
del
or
a
on
tradition,
these
assumptions
are
undone,
and
the
solv
er
is
returned
to
a
usable
state,
ev
en
when
solve()
return
F
alse,
whi
h
no
w
should
b
e
in
terpreted
as
unsatisable
under
assumptions.
F
or
this
to
w
ork,
alling
simplifyDB()
b
efore
solve()
is
no
longer
optional.
It
is
the
me
hanism
for
deteting
onits
indep
enden
t
of
the
assumptions
{
referred
to
as
a
top-level
onit
from
no
w
on
{
whi
h
puts
the
solv
er
in
an
undened
state.
W
e
wish
to
remark
that
the
abilit
y
to
pass
unit
assumptions
to
solve()
is
more
p
o
w
erful
than
it
migh
t
app
ear
at
rst.
F
or
an
example
of
its
use,
see
[ES03
℄.
An
alternativ
e
in
terfae
w
ould
b
e
for
solve()
to
return
one
of
three
v
alues:
[Disussion℄
satisable,
unsatisable,
or
unsatisable
under
assumptions.
This
is
indeed
a
less
error-prone
in
terfae
as
there
is
no
longer
a
pre-ondition
on
the
use
of
solve().
The
urren
t
in
terfae,
ho
w
ev
er,
represen
ts
the
smallest
mo
diation
of
a
non-
inremen
tal
SA
T-solv
er.
The
early
non-inremen
tal
v
ersion
of
S
ATZOO
w
as
made
omplian
t
to
the
ab
o
v
e
in
terfae
b
y
adding
just
5
lines
of
o
de.
3
Ov
erview
of
the
SA
T-solv
er
This
artile
will
treat
the
p
opular
st
yle
of
SA
T-solv
ers
based
on
the
DPLL
algo-
rithm
[DLL62
℄,
ba
ktra
king
b
y
onit
analysis
and
lause
reording
(also
re-
ferred
to
as
le
arning
)
[MS96
℄,
and
b
o
olean
onstrain
t
propagation
(BCP)
using
wathe
d
liter
als
[MZ01
℄.
2
W
e
will
refer
to
this
st
yle
of
solv
er
as
a
onit-driven
SA
T-solver.
The
omp
onen
ts
of
su
h
a
solv
er,
and
indeed
a
more
general
onstrain
t
solv
er,
an
b
e
oneptually
divided
in
to
three
ategories:
Represen
tation.
Someho
w
the
SA
T-instane
m
ust
b
e
represen
ted
b
y
in
ter-
nal
data
strutures,
as
m
ust
an
y
deriv
ed
information.
Inferene.
Brute
fore
sear
h
is
seldom
go
o
d
enough
on
its
o
wn.
A
solv
er
also
needs
some
me
hanism
for
omputing
and
propagating
the
diret
im-
pliations
of
the
urren
t
state
of
information.
Sear
h.
Inferene
is
almost
alw
a
ys
om
bined
with
sear
h
to
mak
e
the
solv
er
omplete.
The
sear
h
an
b
e
view
ed
as
another
w
a
y
of
deriving
information.
A
standard
onit-driv
en
SA
T-solv
er
an
represen
t
lauses
(with
t
w
o
literals
or
more)
and
assignments.
Although
the
assignmen
ts
an
b
e
view
ed
as
unit-lauses,
they
are
treated
sp
eially
in
man
y
w
a
ys,
and
are
b
est
view
ed
as
a
separate
t
yp
e
of
information.
The
only
inferene
me
hanism
used
b
y
a
standard
solv
er
is
unit
pr
op
agation.
As
so
on
as
a
lause
b
eomes
unit
under
the
urren
t
assignmen
t
(all
literals
exept
2
This
inludes
SA
T-solv
ers
su
h
as:
Z
C
HA FF
,
L
IM M AT
,
B
E RKM IN
.
3

one
are
false),
the
remaining
un
b
ound
literal
is
set
to
true,
p
ossibly
making
more
lauses
unit.
The
pro
ess
is
on
tin
ued
un
til
no
more
information
an
b
e
propagated.
The
sear
h
pro
edure
of
a
mo
dern
solv
er
is
the
most
omplex
part.
Heuris-
tially
,
v
ariables
are
pi
k
ed
and
assigned
v
alues
(assumptions
are
made),
un
til
the
propagation
detets
a
onit
(all
literals
of
a
lause
ha
v
e
b
eome
false).
A
t
that
p
oin
t,
a
so
alled
onit
lause
is
onstruted
and
added
to
the
SA
T
problem.
Assumptions
are
then
aneled
b
y
ba
ktra
king
un
til
the
onit
lause
b
eomes
unit,
from
whi
h
p
oin
t
this
unit
lause
is
propagated
and
the
sear
h
pro
ess
on
tin
ues.
M
INI
S
AT
is
extensible
with
arbitrary
b
o
olean
onstrain
ts.
This
will
aet
the
r
epr
esentation,
whi
h
m
ust
b
e
able
to
store
these
onstrain
ts;
the
infer
en
e,
whi
h
m
ust
b
e
able
to
deriv
e
unit
information
from
these
onstrain
ts;
and
the
se
ar
h,
whi
h
m
ust
b
e
able
to
analyze
and
generate
onit
lauses
from
the
onstrain
ts.
The
me
hanism
w
e
suggest
for
managing
general
onstrain
ts
is
v
ery
ligh
t
w
eigh
t,
and
b
y
making
the
dep
endenies
b
et
w
een
the
SA
T-algorithm
and
the
onstrain
ts
implemen
tation
expliit,
w
e
feel
it
rather
adds
to
the
larit
y
of
the
solv
er
than
obsures
it.
Pr
op
agation.
The
propagation
pro
edure
of
M
INI
S
AT
is
largely
inspired
b
y
that
of
C
HAFF
[MZ01
℄.
F
or
ea
h
literal,
a
list
of
onstrain
ts
is
k
ept.
These
are
the
onstrain
ts
that
may
propagate
unit
information
(v
ariable
assignmen
ts)
if
the
literal
b
eomes
Tr
ue.
F
or
lauses,
no
unit
information
an
b
e
propagated
un
til
all
literals
exept
one
ha
v
e
b
eome
F
alse.
Tw
o
un
b
ound
literals
p
and
q
of
the
lause
are
therefore
seleted,
and
referenes
to
the
lause
are
added
to
the
lists
of
p
and
q
resp
etiv
ely
.
The
literals
are
said
to
b
e
wathe
d
and
the
lists
of
onstrain
ts
are
referred
to
as
wather
lists.
As
so
on
as
a
w
at
hed
literal
b
eomes
Tr
ue,
the
onstrain
t
is
in
v
ok
ed
to
see
if
information
ma
y
b
e
propagated,
or
to
selet
new
un
b
ound
literals
to
b
e
w
at
hed.
A
feature
of
the
w
at
her
system
for
lauses
is
that
on
ba
ktra
king,
no
adjust-
men
t
to
the
w
at
her
lists
need
to
b
e
done.
Ba
ktra
king
is
therefore
v
ery
heap.
Ho
w
ev
er,
for
other
onstrain
t
t
yp
es,
this
is
not
neessarily
a
go
o
d
approa
h.
M
INI
S
AT
therefore
supp
orts
the
optional
use
of
undo
lists
for
those
onstrain
ts;
storing
what
onstrain
ts
need
to
b
e
up
dated
when
a
v
ariable
b
eomes
un
b
ound
b
y
ba
ktra
king.
L
e
arning.
The
learning
pro
edure
of
M
INI
S
AT
follo
ws
the
ideas
of
Marques-
Silv
a
and
Sak
allah
in
[MS96℄.
The
pro
ess
starts
when
a
onstrain
t
b
eomes
oniting
(imp
ossible
to
satisfy)
under
the
urren
t
assignmen
t.
The
oniting
onstrain
t
is
then
ask
ed
for
a
set
of
v
ariable
assignmen
ts
that
mak
e
it
on
tradi-
tory
.
F
or
a
lause,
this
w
ould
b
e
all
the
literals
of
the
lause
(whi
h
are
F
alse
under
a
onit).
Ea
h
of
the
v
ariable
assignmen
ts
returned
m
ust
b
e
either
an
assumption
of
the
sear
h
pro
edure,
or
the
result
of
some
pr
op
agation
of
a
on-
strain
t.
The
propagating
onstrain
ts
are
in
turn
ask
ed
for
the
set
of
v
ariable
assignmen
ts
that
fored
the
propagation
to
o
ur,
on
tin
uing
the
analysis
ba
k-
w
ards.
The
pro
edure
is
rep
eated
un
til
some
termination
ondition
is
fullled,
resulting
in
a
set
of
v
ariable
assignmen
ts
that
implies
the
onit.
A
lause
pro-
hibiting
that
partiular
assignmen
t
is
added
to
the
lause
database.
This
le
arnt
4

lause
m
ust
alw
a
ys,
b
y
onstrution,
b
e
implied
b
y
the
original
problem
on-
strain
ts.
Learn
t
lauses
serv
e
t
w
o
purp
oses:
they
driv
e
the
ba
ktra
king
(as
w
e
shall
see)
and
they
sp
eed
up
future
onits
b
y
\a
hing"
the
reason
for
the
onit.
Ea
h
lause
will
prev
en
t
only
a
onstan
t
n
um
b
er
of
inferenes,
but
as
the
reorded
lauses
start
to
build
on
ea
h
other
and
partiipate
in
the
unit
propagation,
the
aum
ulated
eet
of
learning
an
b
e
massiv
e.
Ho
w
ev
er,
as
the
set
of
learn
t
lauses
inrease,
propagation
is
slo
w
ed
do
wn.
Therefore,
the
n
um
b
er
of
learn
t
lauses
is
p
erio
dially
redued,
k
eeping
only
the
lauses
that
seem
useful
b
y
some
heuristi.
Se
ar
h.
The
sear
h
pro
edure
of
a
onit-driv
en
SA
T-solv
er
is
somewhat
im-
pliit.
Although
a
reursiv
e
denition
of
the
pro
edure
migh
t
b
e
more
elegan
t,
it
is
t
ypially
desrib
ed
(and
implemen
ted)
iterativ
ely
.
The
pro
edure
will
start
b
y
seleting
an
unassigned
v
ariable
x
(alled
the
de
ision
variable
)
and
assume
a
v
alue
for
it,
sa
y
Tr
ue.
The
onsequenes
of
x
=
Tr
ue
will
then
b
e
propa-
gated,
p
ossibly
resulting
in
more
v
ariable
assignmen
ts.
All
v
ariables
assigned
as
a
onsequene
of
x
is
said
to
b
e
from
the
same
de
ision
level,
oun
ting
from
1
for
the
rst
assumption
made
and
so
forth.
Assignmen
ts
made
b
efore
the
rst
assumption
(deision
lev
el
0)
are
alled
top-level.
All
assignmen
ts
will
b
e
stored
on
a
sta
k
in
the
order
they
w
ere
made;
from
no
w
on
referred
to
as
the
tr
ail.
The
trail
is
divided
in
to
deision
lev
els
and
is
used
to
undo
information
during
ba
ktra
king.
The
deision
phase
will
on
tin
ue
un
til
either
all
v
ariables
ha
v
e
b
een
assigned,
in
whi
h
ase
w
e
ha
v
e
a
mo
del,
or
a
onit
has
o
urred.
On
onits,
the
learning
pro
edure
will
b
e
in
v
ok
ed
and
a
onit
lause
pro
dued.
The
trail
will
b
e
used
to
undo
deisions,
one
lev
el
at
a
time,
un
til
preisely
one
of
the
literals
of
the
learn
t
lause
b
eomes
un
b
ound
(they
are
all
F
alse
at
the
p
oin
t
of
onit).
By
onstrution,
the
onit
lause
annot
go
diretly
from
oniting
to
a
lause
with
t
w
o
or
more
un
b
ound
literals.
If
the
lause
remains
unit
for
sev
eral
deision
lev
els,
it
is
adv
an
tageous
to
hose
the
lo
w
est
lev
el
(referred
to
as
b
akjumping
or
non-hr
onolo
gi
al
b
aktr
aking
[MS96
℄).
lo
op
pr
op
agate
()
{
pr
op
agate
unit
lauses
if
not
onit
then
if
all
v
ariables
assigned
then
return
Sa
tisfiable
else
de
ide
()
{
pik
a
new
variable
and
assign
it
else
analyze
()
{
analyze
onit
and
add
a
onit
lause
if
top-lev
el
onit
found
then
return
Unsa
tisfiable
else
b
aktr
ak
()
{
undo
assignments
until
onit
lause
is
unit
5

An
imp
ortan
t
part
of
the
pro
edure
is
the
heuristi
for
de
ide().
Lik
e
C
HAFF
,
M
INI
S
AT
uses
a
dynami
v
ariable
order
that
giv
es
priorit
y
to
v
ariables
in
v
olv
ed
in
reen
t
onits.
Although
this
is
a
go
o
d
default
order,
domain
sp
ei
heuristis
ha
v
e
suess-
[Disussion℄
fully
b
een
used
in
v
arious
areas
to
impro
v
e
the
p
erformane
[Stri00
℄.
V
ariable
ordering
is
a
traditional
target
for
impro
ving
SA
T-solv
ers.
A
tivity
heuristis.
One
imp
ortan
t
te
hnique
in
tro
dued
b
y
C
HAFF
[MZ01
℄
is
a
dynami
v
ariable
ordering
based
on
ativit
y
(referred
to
as
the
VSIDS
heuris-
ti).
The
original
heuristi
imp
oses
an
order
on
liter
als,
but
b
orro
wing
from
S
ATZOO
,
w
e
mak
e
no
distintion
b
et
w
een
p
and
p
in
M
INI
S
AT
.
Ea
h
v
ariable
has
an
ativity
atta
hed
to
it.
Ev
ery
time
a
v
ariable
o
urs
in
a
reorded
onit
lause,
its
ativit
y
is
inreased.
W
e
will
refer
to
this
as
bumping.
After
reording
the
onit,
the
ativit
y
of
all
the
v
ariables
in
the
system
are
m
ultiplied
b
y
a
onstan
t
less
than
1,
th
us
de
aying
the
ativit
y
of
v
ariables
o
v
er
time.
Reen
t
inremen
ts
oun
t
more
than
old.
The
urren
t
sum
determines
the
ativit
y
of
a
v
ariable.
In
M
INI
S
AT
w
e
use
a
similar
idea
for
lauses.
When
a
learn
t
lause
is
used
in
the
analysis
pro
ess
of
a
onit,
its
ativit
y
is
bump
ed.
Inativ
e
lauses
are
p
erio
dially
remo
v
ed.
Constr
aint
r
emoval.
The
onstrain
t
database
is
divided
in
to
t
w
o
parts:
the
pr
oblem
onstr
aints
and
the
le
arnt
lauses.
As
w
e
ha
v
e
noted,
the
set
of
learn
t
lauses
an
b
e
p
erio
dially
redued
to
inrease
the
p
erformane
of
propagation.
Learn
t
lauses
are
used
to
rop
future
bran
hes
in
the
sear
h
tree,
so
w
e
risk
getting
a
bigger
sear
h
spae
instead.
The
balane
b
et
w
een
the
t
w
o
fores
is
deliate,
and
there
are
SA
T-instanes
for
whi
h
a
big
learn
t
lause
set
is
ad-
v
an
tageous,
and
others
where
a
small
set
is
b
etter.
M
INI
S
AT
's
default
heuristi
starts
with
a
small
set
and
gradually
inreases
the
size.
Problem
onstrain
ts
an
also
b
e
remo
v
ed
if
they
are
satised
at
the
top-lev
el.
The
API
metho
d
simplifyDB()
is
resp
onsible
for
this.
The
pro
edure
is
par-
tiularly
imp
ortan
t
for
inremen
tal
SA
T-problems,
where
te
hniques
for
lause
remo
v
al
build
on
this
feature.
T
op-level
solver.
Although
the
pseudo-o
de
for
the
sear
h
pro
edure
presen
ted
ab
o
v
e
suÆes
for
a
simple
onit-driv
en
SA
T-solv
er,
a
solv
er
str
ate
gy
an
im-
pro
v
e
the
p
erformane.
A
t
ypial
strategy
applied
b
y
mo
dern
onit-driv
en
SA
T-solv
ers
is
the
use
of
r
estarts
to
esap
e
from
futile
parts
of
the
sear
h
tree.
In
M
INI
S
AT
w
e
also
v
ary
the
n
um
b
er
of
learn
t
lauses
k
ept
at
a
giv
en
time.
F
urthermore,
the
solve()
metho
d
of
the
API
supp
orts
inremen
tal
assumptions,
not
handled
b
y
the
ab
o
v
e
pseudo-o
de.
4
Implemen
tation
The
follo
wing
on
v
en
tions
are
used
in
the
o
de.
A
tomi
t
yp
es
start
with
a
lo
w
er-
ase
letter
and
are
passed
b
y
v
alue.
Comp
osite
t
yp
es
start
with
a
apital
letter
and
are
passed
b
y
referene.
Blo
ks
are
mark
ed
only
b
y
inden
tation
lev
el.
The
6
lass
V
e
hT
i
{
Publi
interfa
e
{
Construtors:
V
e
()
V
e
(int
size)
V
e
(int
size,
T
pad)
{
Size
op
er
ations:
int
size
()
void
shrink
(int
nof
elems)
void
p
op
()
void
gr
owT
o
(int
size)
void
gr
owT
o
(int
size,
T
pad)
void
le
ar
()
{
Stak
interfa
e:
void
push
()
void
push
(T
elem)
T
last
()
{
V
e
tor
interfa
e:
T
op
[
℄
(int
index)
{
Dupli
atation:
void
opyT
o
(V
e
hT
i
op
y)
void
moveT
o
(V
e
hT
i
dest)
lass
lit
{
Publi
interfa
e
lit
(var
x)
{
Glob
al
funtions:
lit
op
:
(lit
p)
b
o
ol
sign
(lit
p)
int
var
(lit
p)
int
index
(lit
p)
lass
lb
o
ol
{
Publi
interfa
e
lb
o
ol
()
lb
o
ol
(b
o
ol
x)
{
Glob
al
funtions:
lb
o
ol
op
:
(lb
o
ol
x)
{
Glob
al
onstants:
lb
o
ol
F
alse
?
,
Tr
ue
?
,
?
lass
Queue
hT
i
{
Publi
interfa
e
Queue
()
void
insert
(T
x)
T
de
queue
()
void
le
ar
()
int
size
()
Fig.
1.
Basi
abstr
at
data
typ
es
use
d
thr
oughout
the
o
de.
The
v
etor
data
t
yp
e
an
push
a
default
onstruted
elemen
t
b
y
the
push
()
metho
d
with
no
argumen
t.
The
moveT
o
()
metho
d
will
mo
v
e
the
on
ten
ts
of
a
v
etor
to
another
v
etor
in
onstan
t
time,
learing
the
soure
v
etor.
The
literal
data
t
yp
e
has
an
index
()
metho
d
whi
h
on
v
erts
the
literal
to
a
\small"
in
teger
suitable
for
arra
y
indexing.
The
var
()
metho
d
returns
the
underlying
v
ariable
of
the
literal,
and
the
sign
()
metho
d
if
the
literal
is
signed
(F
alse
for
x
and
Tr
ue
for
x
).
b
ottom
sym
b
ol
?
will
alw
a
ys
mean
undene
d
;
the
sym
b
ol
F
alse
will
b
e
used
to
denote
the
b
o
olean
false.
W
e
will
use,
but
not
sp
eify
an
implemen
tation
of,
the
follo
wing
abstrat
data
t
yp
es:
V
e
hT
i
an
extensible
v
etor
of
t
yp
e
T
;
lit
the
t
yp
e
of
literals
on
taining
a
sp
eial
literal
?
lit
;
lb
o
ol
for
the
lifted
b
o
olean
domain
on
taining
elemen
ts
Tr
ue
?
,
F
alse
?
,
and
?;
Queue
hT
i
a
queue
of
t
yp
e
T
.
W
e
also
use
var
as
a
t
yp
e
synon
ym
for
int
(for
impliit
do
umen
tation)
with
the
sp
eial
onstan
t
?
v
ar
.
The
in
terfaes
of
the
abstrat
data
t
yp
es
are
presen
ted
in
Figure
1.
4.1
The
solv
er
state
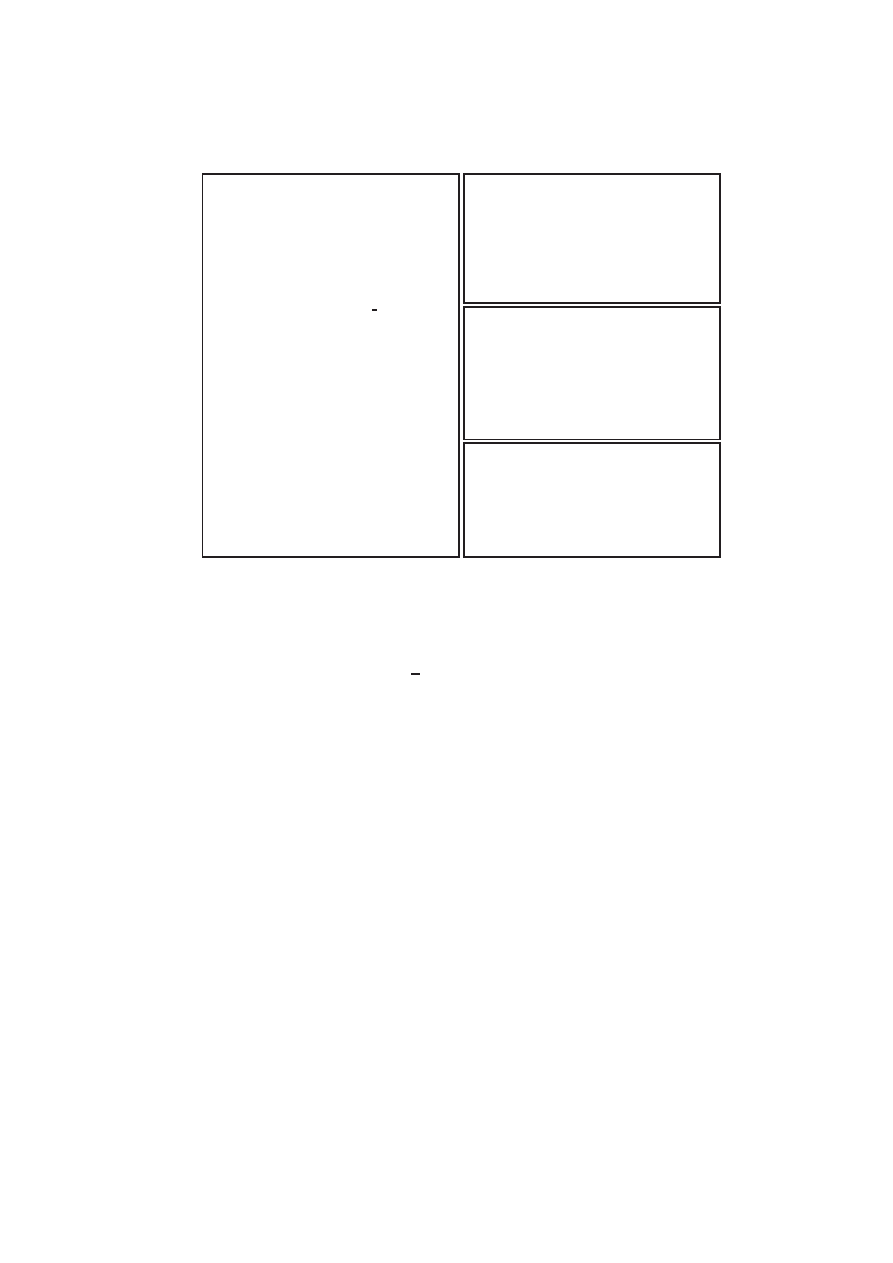
A
n
um
b
er
of
things
need
to
b
e
stored
in
the
solv
er
state.
Figure
2
sho
ws
the
omplete
set
of
mem
b
er
v
ariables
of
the
solv
er
t
yp
e
of
M
INI
S
AT
.
T
ogether
with
the
state
v
ariables
w
e
dene
some
short
help
er
metho
ds
in
Figure
3,
as
w
ell
as
the
in
terfae
of
V
arOr
der
(Figure
4),
explained
in
setion
4.6.
The
state
do
es
not
on
tain
a
b
o
olean
\onit"
to
remem
b
er
if
a
top-lev
el
[Disussion℄
onit
has
b
een
rea
hed.
Instead
w
e
imp
ose
as
an
in
v
arian
t
that
the
solv
er
m
ust
nev
er
b
e
in
a
oniting
state.
As
a
onsequene,
an
y
metho
d
that
puts
the
solv
er
7

in
a
oniting
state
m
ust
omm
uniate
this.
Using
the
solv
er
ob
jet
after
this
p
oin
t
is
illegal.
The
in
v
arian
t
mak
es
the
in
terfae
sligh
tly
more
um
b
ersome
to
use,
but
simplies
the
implemen
tation,
whi
h
is
imp
ortan
t
when
extending
and
exp
erimen
ting
with
new
te
hniques.
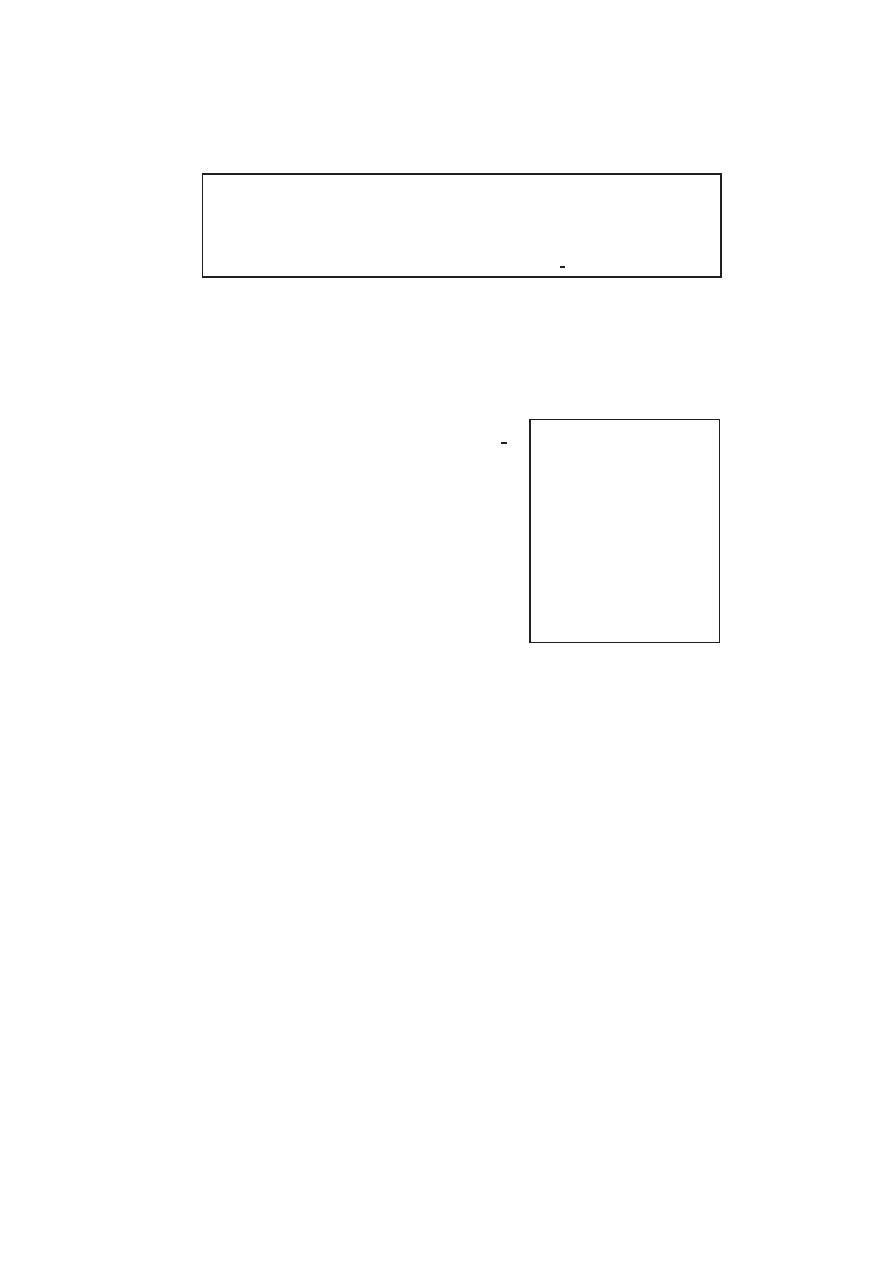
4.2
Constrain
ts
M
INI
S
AT
an
handle
arbitrary
onstrain
ts
o
v
er
b
o
olean
v
ariables
through
the
abstration
presen
ted
in
Figure
5.
Ea
h
onstrain
t
t
yp
e
needs
to
implemen
t
metho
ds
for
onstruting,
remo
ving,
propagating
and
alulating
reasons.
In
addition,
metho
ds
for
simplifying
the
onstrain
t
and
up
dating
the
onstrain
t
on
ba
ktra
k
an
b
e
sp
eied.
W
e
explain
the
meaning
and
resp
onsibilities
of
these
metho
ds
in
detail:
Construtor.
The
onstrutor
ma
y
only
b
e
alled
at
the
top-lev
el.
It
m
ust
reate
and
add
the
onstrain
t
to
appropriate
w
at
her
lists
after
enqueu-
ing
an
y
unit
information
deriv
able
under
the
urren
t
top-lev
el
assignmen
t.
Should
a
onit
arise,
this
m
ust
b
e
omm
uniated
to
the
aller.
Remo
v
e.
The
remo
v
e
metho
d
supplan
ts
the
destrutor
b
y
reeiving
the
solv
er
state
as
a
parameter.
It
should
disp
ose
the
onstrain
t
and
remo
v
e
it
from
the
w
at
her
lists.
Propagate.
The
propagate
metho
d
is
alled
if
the
onstrain
t
is
found
in
a
w
at
her
list
during
propagation
of
unit
information
p.
The
onstrain
t
is
remo
v
ed
from
the
list
and
is
required
to
insert
itself
in
to
a
new
or
the
same
w
at
her
list.
An
y
unit
information
deriv
able
as
a
onsequene
of
p
should
b
e
enqueued.
If
suessful,
Tr
ue
is
returned;
if
a
onit
is
deteted,
F
alse
is
returned.
The
onstrain
t
ma
y
add
itself
to
the
undo
list
of
var
(p)
if
it
needs
to
b
e
up
dated
when
p
b
eomes
un
b
ound.
Simplify
.
A
t
the
top-lev
el,
a
onstrain
t
ma
y
b
e
giv
en
the
opp
ortunit
y
to
simplify
its
represen
tation
(returns
F
alse)
or
state
that
the
onstrain
t
is
satised
under
the
urren
t
assignmen
t
and
an
b
e
remo
v
ed
(returns
Tr
ue).
A
onstrain
t
m
ust
not
b
e
simpliable
to
pro
due
unit
information
or
to
b
e
oniting;
in
that
ase
the
propagation
has
not
b
een
orretly
dened.
Undo.
During
ba
ktra
king,
this
metho
d
is
alled
if
the
onstrain
t
added
itself
to
the
undo
list
of
var
(p)
in
pr
op
agate().
The
urren
t
v
ariable
assign-
men
ts
are
guaran
teed
to
b
e
iden
tial
to
that
of
the
momen
t
b
efore
pr
op
a-
gate()
w
as
alled.
Calulate
Reason.
This
metho
d
is
giv
en
a
literal
p
and
an
empt
y
v
etor.
The
onstrain
t
is
the
r
e
ason
for
p
b
eing
true,
that
is,
during
propagation,
the
urren
t
onstrain
t
enqueued
p.
The
reeiv
ed
v
etor
is
extended
to
inlude
a
set
of
assignmen
ts
(represen
ted
as
literals)
implying
p.
The
urren
t
v
ariable
assignmen
ts
are
guaran
teed
to
b
e
iden
tial
to
that
of
the
momen
t
b
efore
the
onstrain
t
propagated
p.
The
literal
p
is
also
allo
w
ed
to
b
e
the
sp
eial
onstan
t
?
lit
in
whi
h
ase
the
reason
for
the
lause
b
eing
oniting
should
b
e
returned
through
the
v
etor.
8

lass
Solv
er
{
Constr
aint
datab
ase
V
e
hConstr
i
onstrs
{
List
of
pr
oblem
onstr
aints.
V
e
hClause
i
learn
ts
{
List
of
le
arnt
lauses.
double
la
in
{
Clause
ativity
inr
ement
{
amount
to
bump
with.
double
la
dea
y
{
De
ay
fator
for
lause
ativity.
{
V
ariable
or
der
V
e
hdouble
i
ativit
y
{
Heuristi
me
asur
ement
of
the
ativity
of
a
variable.
double
v
ar
in
{
V
ariable
ativity
inr
ement
{
amount
to
bump
with.
double
v
ar
dea
y
{
De
ay
fator
for
variable
ativity.
V
arOr
der
order
{
Ke
eps
tr
ak
of
the
dynami
variable
or
der.
{
Pr
op
agation
V
e
hV
e
hConstr
ii
{
F
or
e
ah
liter
al
'p',
a
list
of
onstr
aints
wathing
'p'.
w
at
hes
A
onstr
aint
wil
l
b
e
insp
e
te
d
when
'p'
b
e
omes
true.
V
e
hV
e
hConstr
ii
{
F
or
e
ah
variable
'x',
a
list
of
onstr
aints
that
ne
e
d
to
undos
up
date
when
'x'
b
e
omes
unb
ound
by
b
aktr
aking.
Queue
hlit
i
propQ
{
Pr
op
agation
queue.
{
Assignments
V
e
hlb
o
ol
i
assigns
{
The
urr
ent
assignments
indexe
d
on
variables.
V
e
hlit
i
trail
{
List
of
assignments
in
hr
onolo
gi
al
or
der.
V
e
hint
i
trail
lim
{
Sep
ar
ator
indi
es
for
dier
ent
de
ision
levels
in
'tr
ail'.
V
e
hConstr
i
reason
{
F
or
e
ah
variable,
the
onstr
aint
that
implie
d
its
value.
V
e
hint
i
lev
el
{
F
or
e
ah
variable,
the
de
ision
level
it
was
assigne
d.
int
ro
ot
lev
el
{
Sep
ar
ates
inr
emental
and
se
ar
h
assumptions.
Fig.
2.
In
ternal
state
of
the
solv
er.
int
Solver.nV
ars
()
return
assigns.size
()
int
Solver.nAssigns
()
return
trail.size
()
int
Solver.nConstr
aints
()
return
onstrs.size
()
int
Solver.nL
e
arnts
()
return
learn
ts.size
()
lb
o
ol
Solver.value
(var
x)
return
assigns[x℄
lb
o
ol
Solver.value
(lit
p)
return
sign
(p)
?
:assigns[var
(p)℄
:
assigns[var
(p)℄
int
Solver.de
isionL
evel
()
return
trail
lim.size()
Fig.
3.
Small
help
er
metho
ds.
F
or
instane,
nL
e
arnts()
returns
the
n
um
b
er
of
learn
t
lauses.
lass
V
arOr
der
{
Publi
interfa
e
V
arOr
der
(V
e
hlb
o
ol
i
ref
to
assigns,
V
e
hdouble
i
ref
to
ativit
y)
void
newV
ar
()
{
Cal
le
d
when
a
new
variable
is
r
e
ate
d.
void
up
date
(var
x)
{
Cal
le
d
when
variable
has
inr
e
ase
d
in
ativity.
void
up
dateA
l
l
()
{
Cal
le
d
when
al
l
variables
have
b
e
en
assigne
d
new
ativities.
void
undo
(var
x)
{
Cal
le
d
when
variable
is
unb
ound
(may
b
e
sele
te
d
again).
var
sele
t
()
{
Cal
le
d
to
sele
t
a
new,
unassigne
d
variable.
Fig.
4.
Assisting
ADT
for
the
dynami
v
ariable
ordering
of
the
solv
er.
The
onstrutor
tak
es
referenes
to
the
assignmen
t
v
etor
and
the
ativit
y
v
etor
of
the
solv
er.
The
metho
d
sele
t()
will
return
the
unassigned
v
ariable
with
the
highest
ativit
y
.
9
lass
Constr
virtual
void
r
emove
(Solver
S)
{
must
b
e
dene
d
virtual
b
o
ol
pr
op
agate
(Solver
S,
lit
p)
{
must
b
e
dene
d
virtual
b
o
ol
simplify
(Solver
S)
{
defaults
to
r
eturn
false
virtual
void
undo
(Solver
S,
lit
p)
{
defaults
to
do
nothing
virtual
void
alR
e
ason
(Solver
S,
lit
p,
V
e
hlit
i
out
reason)
{
must
b
e
dene
d
Fig.
5.
Abstrat
base
lass
for
onstrain
ts.
The
o
de
for
the
Clause
onstrain
t
is
presen
ted
in
Figure
7.
It
is
also
used
for
learn
t
lauses,
whi
h
are
unique
in
that
they
an
b
e
added
to
the
lause
database
while
the
solv
er
is
not
at
top-lev
el.
This
mak
es
the
onstrutor
o
de
a
bit
more
ompliated
than
it
w
ould
b
e
for
a
normal
onstrain
t.
Implemen
ting
the
addClause()
metho
d
of
the
var
Solver.newV
ar
()
int
index
index
=
nV
ars
()
w
at
hes
.push
()
w
at
hes
.push
()
undos
.push
()
reason
.push
(Null)
assigns
.push
(?)
lev
el
.push
(-1)
ativit
y
.push
(0)
order
.newV
ar
()
return
index
Fig.
6.
Creates
a
new
SA
T
v
ariable
in
the
solv
er.
solv
er
API
is
just
a
matter
of
alling
Clause
-
new()
and
pushing
the
new
onstrain
t
on
the
\onstrs"
v
etor,
storing
the
list
of
problem
on-
strain
ts.
F
or
ompleteness,
w
e
also
displa
y
the
o
de
for
reating
v
ariables
in
the
solv
er
(Fig-
ure
6).
There
are
a
n
um
b
er
of
tri
ks
for
smart-o
ding
[Disussion℄
that
an
b
e
used
in
a
C++
implemen
tation
of
Clause.
In
partiularly
the
\lits"
v
etor
an
b
e
implemen
ted
as
an
zero-sized
arra
y
plaed
last
in
the
lass,
and
then
extra
memory
allo
ated
for
the
lause
to
on
tain
the
data.
W
e
observ
ed
a
20%
sp
eedup
for
this
tri
k.
F
urthermore,
mem-
ory
an
b
e
sa
v
ed
b
y
not
storing
ativit
y
for
prob-
lem
lauses.
Of
the
metho
ds
dening
a
onstrain
t,
pr
op
agate()
should
b
e
the
primary
tar-
[Disussion℄
get
for
eÆien
t
implemen
tation.
The
SA
T-solv
er
sp
ends
ab
out
80%
of
the
time
propagating,
so
the
metho
d
will
b
e
alled
frequen
tly
.
In
S
ATZOO
a
p
erformane
gain
w
as
a
hiev
ed
b
y
remem
b
ering
the
p
osition
of
the
last
w
at
hed
literal
and
start
lo
oking
for
a
new
literal
to
w
at
h
from
that
p
osition.
F
urther
sp
eedups
ma
y
b
e
a
hiev
ed
b
y
sp
eializing
the
o
de
for
small
lause
sizes.
4.3
Propagation
Giv
en
the
me
hanism
for
adding
onstrain
ts,
w
e
no
w
mo
v
e
on
to
desrib
e
the
propagation
of
unit
information
on
these
onstrain
ts.
The
propagation
routine
k
eeps
a
set
of
literals
(unit
information)
that
is
to
b
e
propagated.
W
e
all
this
the
pr
op
agation
queue.
When
a
literal
is
inserted
in
to
the
queue,
the
orresp
onding
v
ariable
is
immediately
assigned.
F
or
ea
h
literal
in
the
queue,
the
w
at
her
list
of
that
literal
determines
the
onstrain
ts
that
ma
y
b
e
aeted
b
y
the
assignmen
t.
Through
the
in
terfae
desrib
ed
in
the
previous
setion,
ea
h
onstrain
t
is
ask
ed
b
y
a
all
to
its
pr
op
agate()
metho
d
if
more
unit
information
an
b
e
inferred,
whi
h
will
then
b
e
enqueued.
The
pro
ess
on
tin
ues
un
til
either
the
queue
is
empt
y
or
a
onit
is
found.
10
lass
Clause
:
publi
Constr
b
o
ol
learn
t
o
at
ativit
y
V
e
hlit
i
lits
{
Construtor
{
r
e
ates
a
new
lause
and
adds
it
to
wather
lists:
stati
b
o
ol
Clause
new
(Solver
S,
V
e
hlit
i
ps,
b
o
ol
learn
t,
Clause
out
lause)
\Implemen
tation
in
Figure
8
"
{
L
e
arnt
lauses
only:
b
o
ol
lo
ke
d
(Solver
S)
return
S.reason[var
(lits[0℄)℄
==
this
{
Constr
aint
interfa
e:
void
r
emove
(Solver
S)
remo
v
eElem(this,
S.w
at
hes[index(:lits[0℄)℄)
remo
v
eElem(this,
S.w
at
hes[index(:lits[1℄)℄)
delete
this
b
o
ol
simplify
(Solver
S)
{
only
al
le
d
at
top-level
with
empty
pr
op.
queue
int
j
=
0
for
(int
i
=
0;
i
<
lits.size
();
i++)
if
(S.value
(lits[i℄)
==
Tr
ue
?
)
return
Tr
ue
else
if
(S.value
(lits[i℄)
==
?)
lits[j++℄
=
lits[i℄
{
false
liter
als
ar
e
not
opie
d
(only
o
ur
for
i
2)
lits.shrink(lits.size
()
j)
return
F
alse
b
o
ol
pr
op
agate
(Solver
S,
lit
p)
{
Make
sur
e
the
false
liter
al
is
lits[1℄:
if
(lits[0℄
==
:p)
lits[0℄
=
lits[1℄,
lits[1℄
=
:p
{
If
0th
wath
is
true,
then
lause
is
alr
e
ady
satise
d.
if
(S.value
(lits[0℄)
==
Tr
ue
?
)
S.w
at
hes[index
(p)℄.push
(this)
{
r
e-insert
lause
into
wather
list
return
Tr
ue
{
L
o
ok
for
a
new
liter
al
to
wath:
for
(int
i
=
2;
i
<
size
();
i++)
if
(S.value
(lits[i℄)
!=
F
alse
?
)
lits[1℄
=
lits[i℄,
lits[i℄
=
:p
S.w
at
hes[index
(:lits[1℄)℄.push
(this)
{
insert
lause
into
wather
list
return
Tr
ue
{
Clause
is
unit
under
assignment:
S.w
at
hes[index
(p)℄.push
(this)
return
S.enqueue
(lits[0℄,
this)
{
enqueue
for
pr
op
agation
void
alR
e
ason
(Solver
S,
lit
p,
ve
hlit
i
out
reason)
{
invariant:
(p
==
?)
or
(p
==
lits[0℄
)
for
(int
i
=
((p
==
?)
?
0
:
1);
i
<
size
();
i++)
out
reason.push
(:lits[i℄)
{
invariant:
S.value(lits[i℄)
==
F
alse
?
if
(le
arnt
)
S.laBumpAtivit
y(this)
Fig.
7.
Implemen
tation
of
the
Clause
onstrain
t.
11
b
o
ol
Clause
new
(Solver
S,
V
e
hlit
i
ps,
b
o
ol
learn
t,
Clause
out
lause)
out
lause
=
Null
{
Normalize
lause:
if
(!learn
t)
if
("an
y
literal
in
ps
is
true")
return
Tr
ue
if
("b
oth
p
and
:p
o
urs
in
ps")
return
Tr
ue
"remo
v
e
all
false
literals
from
ps"
"remo
v
e
all
dupliates
from
ps"
if
(ps.size
()
==
0)
return
F
alse
else
if
(ps.size
()
==
1)
return
S.enqueue
(ps[0℄)
{
unit
fats
ar
e
enqueue
d
else
{
A
l
lo
ate
lause:
Clause
=
new
Clause
ps.moveT
o
(.lits)
.learn
t
=
learn
t
.ativit
y
=
0
{
only
r
elevant
for
le
arnt
lauses
if
(learn
t)
{
Pik
a
se
ond
liter
al
to
wath:
"Let
max
i
b
e
the
index
of
the
literal
with
highest
deision
lev
el"
.lits[1℄
=
ps[max
i℄,
.lits[max
i℄
=
ps[1℄
{
Bumping:
S.laBumpA
tivity
()
{
new
ly
le
arnt
lauses
should
b
e
onsider
e
d
ative
for
(int
i
=
0;
i
<
ps.size
();
i++)
S.varBumpA
tivity
(ps[i℄)
{
variables
in
onit
lauses
ar
e
bump
e
d
{
A
dd
lause
to
wather
lists:
S.w
at
hes[index
(:.lits[0℄)℄.push
()
S.w
at
hes[index
(:.lits[1℄)℄.push
()
out
lause
=
return
Tr
ue
Fig.
8.
Construtor
funtion
for
lauses.
Returns
F
alse
if
top-lev
el
onit
is
deteted.
'out
lause'
ma
y
b
e
set
to
Null
if
the
new
lause
is
already
satised
under
the
urren
t
top-lev
el
assignmen
t.
P
ost-ondition:
'ps'
is
leared.
F
or
learn
t
lauses,
all
literals
will
b
e
false
exept
`lits[0℄'
(this
b
y
design
of
the
analyze
()
metho
d).
F
or
the
propagation
to
w
ork,
the
seond
w
at
h
m
ust
b
e
put
on
the
literal
whi
h
will
rst
b
e
un
b
ound
b
y
ba
ktra
king.
(Note
that
none
of
the
learn
t-lause
sp
ei
things
needs
to
b
e
done
for
a
user
dened
onstrain
t
t
yp
e.)
12
An
implemen
tation
of
this
pro
edure
is
displa
y
ed
in
Figure
9.
It
starts
b
y
dequeuing
a
literal
and
learing
the
w
at
her
list
for
that
literal
b
y
mo
ving
it
to
\tmp".
The
propagate
metho
d
is
then
alled
for
ea
h
onstrain
t
of
\tmp".
This
will
re-insert
w
at
hes
in
to
new
lists.
Should
a
onit
b
e
deteted
during
the
tra
v
ersal
of
\tmp",
the
remaining
w
at
hes
will
b
e
opied
ba
k
to
the
original
w
at
her
list,
and
the
propagation
queue
leared.
The
metho
d
for
enqueuing
unit
information
is
relativ
ely
straigh
tforw
ard.
Note
that
the
same
fat
an
b
e
enqueued
sev
eral
times,
as
it
ma
y
b
e
prop-
agated
from
dieren
t
onstrain
ts,
but
it
will
only
b
e
put
on
the
propagation
queue
one.
It
ma
y
b
e
that
later
enqueuings
ha
v
e
a
\b
etter"
reason
(determined
heuristi-
[Disussion℄
ally)
and
a
small
p
erformane
gain
w
as
a
hiev
ed
in
S
ATZOO
b
y
hanging
reason
if
the
new
reason
w
as
smaller
than
the
previously
stored.
The
hanging
aets
the
onit
lause
generation
desrib
ed
in
the
next
setion.
4.4
Learning
This
setion
desrib
es
the
onit-driv
en
lause
learning.
It
w
as
rst
desrib
ed
in
[MS96
℄
and
is
one
of
the
ma
jor
adv
anes
of
SA
T-te
hnology
in
the
last
deade.
W
e
desrib
e
the
basi
onit-analysis
algorithm
b
y
an
example.
Assume
the
database
on
tains
the
lause
fx;
y
;
z
g
whi
h
just
b
eame
unsatised
during
propagation.
This
is
our
onit.
W
e
all
x
^
y
^
z
the
reason
set
of
the
onit.
No
w
x
is
false
b
eause
x
w
as
propagated
from
some
onstrain
t.
W
e
ask
that
onstrain
t
to
giv
e
us
the
reason
for
propagating
x
(the
alR
e
ason()
metho
d).
It
will
resp
ond
with
another
onjuntion
of
literals,
sa
y
u
^
v
.
These
w
ere
the
v
ariable
assignmen
t
that
implied
x.
The
onstrain
t
ma
y
in
fat
ha
v
e
b
een
the
lause
fu
;
v
;
xg.
F
rom
this
little
analysis
w
e
kno
w
that
u
^
v
^
y
^
z
m
ust
also
lead
to
a
onit.
W
e
ma
y
prohibit
this
onit
b
y
adding
the
lause
fu
;
v
;
y
;
z
g
to
the
lause
database.
This
w
ould
b
e
an
example
of
a
le
arnt
onit
lause.
In
the
example,
w
e
pi
k
ed
only
one
literal
and
analyzed
it
one
step.
The
pro
ess
of
expanding
literals
with
their
reason
sets
an
b
e
on
tin
ued,
in
the
extreme
ase
un
til
all
the
literals
of
the
onit
set
are
deision
v
ariables
(whi
h
w
ere
not
propagated
b
y
an
y
onstrain
ts).
Dieren
t
learning
s
hemes
based
on
this
pro
ess
ha
v
e
b
een
prop
osed.
Exp
erimen
tally
the
\First
Unique
Impliation
P
oin
t"
(First
UIP)
heuristi
has
b
een
sho
wn
eetiv
e
[ZM01
℄.
W
e
will
not
giv
e
the
denition
of
UIPs
here,
but
just
state
the
algorithm:
In
a
breadth-rst
manner,
on
tin
ue
to
expand
literals
of
the
urren
t
deision
lev
el,
un
til
there
is
just
one
left.
In
the
o
de
for
analyze(),
displa
y
ed
in
Figure
10,
w
e
mak
e
use
of
the
fat
that
a
breadth-rst
tra
v
ersal
an
b
e
a
hiev
ed
b
y
insp
eting
the
trail
ba
kw
ards.
Esp
eially
,
the
v
ariables
of
the
reason
set
of
p
is
alw
a
ys
b
efore
p
in
the
trail.
F
ur-
thermore,
in
the
algorithm
w
e
initialize
p
to
?
lit
,
whi
h
will
mak
e
alR
e
ason()
return
the
reason
for
the
onit.
Assuming
x
to
b
e
the
unit
information
that
auses
the
onit,
an
alternativ
e
[Disussion℄
implemen
tation
w
ould
b
e
to
alulate
the
reason
for
x
and
just
add
x
to
that
set.
The
o
de
w
ould
b
e
sligh
tly
more
um
b
ersome
but
the
on
trat
for
alR
e
ason()
w
ould
b
e
simpler,
as
w
e
no
longer
need
the
sp
eial
ase
for
?
lit
.
13

Constr
Solver.pr
op
agate
()
while
(propQ.size
()
>
0)
lit
p
=
propQ.de
queue
()
{
'p'
is
now
the
enqueue
d
fat
to
pr
op
agate
V
e
hConstr
i
tmp
{
'tmp'
wil
l
ontain
the
wather
list
for
'p'
w
at
hes[index
(p)℄.moveT
o
(tmp)
for
(int
i
=
0;
i
<
tmp.size
();
i++)
if
(!tmp[i℄.pr
op
agate
(this,
p))
{
Constr
aint
is
oniting;
opy
r
emaining
wathes
to
'wathes[p℄'
{
and
r
eturn
onstr
aint:
for
(int
j
=
i+1;
j
<
tmp.size
();
j++)
w
at
hes[index
(p)℄.push
(tmp[j℄)
propQ.le
ar
()
return
tmp[i℄
return
Null
b
o
ol
Solver.enqueue
(lit
p,
Constr
from
=
Null)
if
(value
(p)
!=
?)
if
(value
(p)
==
F
alse
?
)
{
Coniting
enqueue
d
assignment
return
F
alse
else
{
Existing
onsistent
assignment
{
don
't
enqueue
return
Tr
ue
else
{
New
fat,
stor
e
it
assigns
[var
(p)℄
=
lb
o
ol
(!sign
(p))
lev
el
[var
(p)℄
=
de
isionL
evel
()
reason
[var
(p)℄
=
from
trail.push
(p)
propQ.insert
(p)
return
Tr
ue
Fig.
9.
pr
op
agate():
Propagates
all
enqueued
fats.
If
a
onit
arises,
the
oniting
lause
is
returned,
otherwise
Null.
enqueue():
Puts
a
new
fat
on
the
propagation
queue,
as
w
ell
as
immediately
up
dating
the
v
ariable's
v
alue
in
the
assignmen
t
v
etor.
If
a
onit
arises,
F
alse
is
returned
and
the
propagation
queue
is
leared.
The
parameter
'from'
on
tains
a
referene
to
the
onstrain
t
from
whi
h
'p'
w
as
propagated
(defaults
to
Null
if
omitted).
Finally
,
the
analysis
not
only
returns
a
onit
lause,
but
also
the
ba
k-
tra
king
lev
el.
This
is
the
lo
w
est
deision
lev
el
for
whi
h
the
onit
lause
is
unit.
It
is
adv
an
tageous
to
ba
ktra
k
as
far
as
p
ossible
[MS96
℄,
and
is
referred
to
as
b
ak-jumping
or
non-hr
onolo
gi
al
b
aktr
aking
in
the
literature.
4.5
Sear
h
The
sear
h
metho
d
in
Figure
13
w
orks
basially
as
desrib
ed
in
setion
3
but
with
the
follo
wing
additions:
Restarts.
The
rst
argumen
t
of
the
sear
h
metho
d
is
\nof
onits".
The
sear
h
for
a
mo
del
or
a
on
tradition
will
only
b
e
onduted
for
this
man
y
14
void
Solver.analyze
(Constr
on,
V
e
hlit
i
out
learn
t,
Int
out
btlev
el)
V
e
hb
o
ol
i
seen(nV
ars
(),
F
alse)
int
oun
ter
=
0
lit
p
=
?
lit
V
e
hlit
i
p
reason
out
learn
t.push
()
{
le
ave
r
o
om
for
the
asserting
liter
al
out
btlev
el
=
0
do
p
reason.le
ar
()
on.
alR
e
ason
(this,
p,
p
reason)
{
invariant
her
e:
on
!=
NULL
{
Tra
e
reason
f
or
p:
for
(int
j
=
0;
j
<
p
reason.size();
j++)
lit
q
=
p
reason[j℄
if
(!seen[var
(q)℄)
seen[var
(q)℄
=
Tr
ue
if
(lev
el[var
(q)℄
==
de
isionL
evel
())
oun
ter++
else
if
(lev
el[var
(q)℄
>
0)
{
exlude
variables
fr
om
de
ision
level
0
out
learn
t.push
(:q)
out
btlev
el
=
max
(out
btlev
el,
lev
el[var
(q)℄)
{
Selet
next
literal
to
look
a
t:
do
p
=
trail.last
()
on
=
reason[var
(p)℄
undoOne
()
while
(!seen[var
(p)℄)
oun
ter
while
(oun
ter
>
0)
out
learn
t[0℄
=
:p
Fig.
10.
Analyze
a
onit
and
pro
due
a
reason
lause.
Pre-onditions:
(1)
'out
learn
t'
is
assumed
to
b
e
leared.
(2)
Curren
t
deision
lev
el
m
ust
b
e
greater
than
ro
ot
lev
el.
P
ost-onditions:
(1)
'out
learn
t[0℄'
is
the
asserting
literal
at
lev
el
'out
btlev
el'.
Eet:
Will
undo
part
of
the
trail,
but
not
b
ey
ond
last
deision
lev
el.
void
Solver.r
e
or
d
(V
e
hlit
i
lause)
Clause
{
wil
l
b
e
set
to
r
e
ate
d
lause,
or
NULL
if
'lause[℄'
is
unit
Clause
new
(this,
lause,
Tr
ue,
)
{
annot
fail
at
this
p
oint
enqueue
(lause[0℄,
)
{
annot
fail
at
this
p
oint
if
(
!=
Null)
learn
ts.push
()
Fig.
11.
Reord
a
lause
and
driv
e
ba
ktra
king.
Pre-ondition:
'lause[0℄'
m
ust
on
tain
the
asserting
literal.
In
partiular,
'lause[℄'
m
ust
not
b
e
empt
y
.
15

onits.
If
failing
to
solv
e
the
SA
T-problem
within
the
b
ound,
all
assump-
tions
will
b
e
aneled
and
?
returned.
The
surrounding
solv
er
strategy
will
then
restart
the
sear
h,
p
ossibly
with
a
new
set
of
parameters.
Redue.
The
seond
argumen
t,
\nof
learn
ts",
sets
an
upp
er
limit
on
the
n
um
b
er
of
learn
t
lauses
that
are
k
ept.
One
this
n
um
b
er
is
rea
hed,
r
e-
du
eDB()
is
alled.
Clauses
that
are
urren
tly
the
reason
for
a
v
ariable
as-
signmen
t
are
said
to
b
e
lo
ke
d
and
annot
b
e
remo
v
ed
b
y
r
e
du
eDB().
F
or
this
reason,
the
limit
is
extended
b
y
the
n
um
b
er
of
assigned
v
ariables,
whi
h
appro
ximates
the
n
um
b
er
of
lo
k
ed
lauses.
P
arameters.
The
third
argumen
t
to
the
sear
h
metho
d
groups
some
tuning
onstan
ts.
In
the
urren
t
v
ersion
of
M
INI
S
AT
,
it
only
on
tains
the
dea
y
fators
for
v
ariables
and
lauses.
Ro
ot-lev
el.
T
o
supp
ort
inremen
tal
SA
T,
the
onept
of
a
r
o
ot-level
is
in-
tro
dued.
The
ro
ot-lev
el
ats
a
bit
as
a
new
top-lev
el.
Ab
o
v
e
the
ro
ot-lev
el
are
the
inremen
tal
assumptions
passed
to
solve()
(if
an
y).
The
sear
h
pro-
edure
is
not
allo
w
ed
to
ba
ktra
k
ab
o
v
e
the
ro
ot-lev
el,
as
this
w
ould
hange
the
inremen
tal
assumptions.
If
w
e
rea
h
a
onit
at
ro
ot-lev
el,
the
sear
h
will
return
F
alse.
A
problem
with
the
approa
h
presen
ted
here
is
onit
lauses
that
are
unit.
F
or
these,
analyze()
will
alw
a
ys
return
a
ba
ktra
k
lev
el
of
0
(top-
lev
el).
As
unit
lauses
are
treated
sp
eially
,
they
are
nev
er
added
to
the
lause
database.
Instead
they
are
enqueued
as
fats
to
b
e
propagated
(see
the
o
de
of
Clause
new()
).
There
w
ould
b
e
no
problem
if
this
w
as
done
at
top-lev
el.
Ho
w
ev
er,
the
sear
h
pro
edure
will
only
undo
un
til
ro
ot-lev
el,
whi
h
means
that
the
unit
fat
will
b
e
enqueued
there.
One
se
ar
h()
has
solv
ed
the
urren
t
SA
T-problem,
the
surrounding
solv
er
strategy
will
undo
an
y
inremen
tal
assumption
and
put
the
solv
er
ba
k
at
the
top-lev
el.
By
this
the
unit
lause
will
b
e
forgotten,
and
the
next
inremen
tal
SA
T
problem
will
ha
v
e
to
infer
it
again.
A
solution
to
this
is
to
store
the
learn
t
unit
lauses
in
a
v
etor
and
re-insert
them
at
top-lev
el
b
efore
the
next
all
to
solve().
The
reason
for
omitting
this
in
M
INI
S
AT
is
that
w
e
ha
v
e
not
seen
an
y
p
erformane
gain
b
y
this
extra
handling
in
our
appliations
[ES03
,CS03
℄.
Simpliit
y
th
us
ditates
that
w
e
lea
v
e
it
out
of
the
presen
tation.
Simplify
.
Pro
vided
the
ro
ot-lev
el
is
0
(no
assumptions
w
ere
passed
to
solve()
)
the
sear
h
will
return
to
the
top-lev
el
ev
ery
time
a
unit
lause
is
learn
t.
A
t
that
p
oin
t
it
is
legal
to
all
simplifyDB()
to
simplify
the
problem
onstrain
ts
aording
to
the
top-lev
el
assignmen
t.
If
a
stronger
simplier
than
presen
ted
here
is
implemen
ted,
a
on
tradition
ma
y
b
e
found,
in
whi
h
ase
the
sear
h
should
b
e
ab
orted.
As
our
simplier
is
not
stronger
than
normal
propaga-
tion,
it
an
nev
er
rea
h
a
on
tradition,
so
w
e
ignore
the
return
v
alue
of
simplify().
16
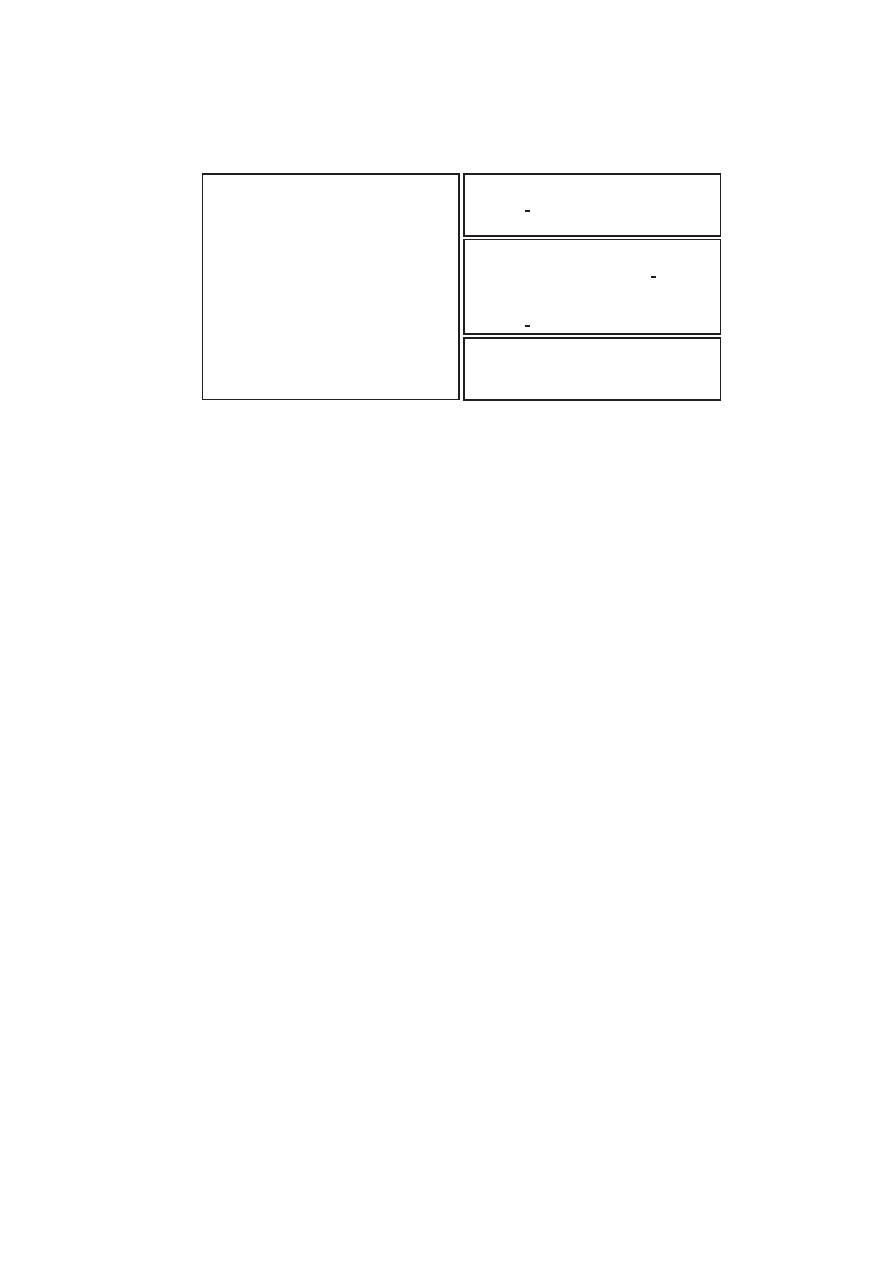
void
Solver.undoOne
()
lit
p
=
trail.last
()
var
x
=
var
(p)
assigns
[x℄
=
?
reason
[x℄
=
Null
lev
el
[x℄
=
-1
order.undo
(x)
trail.p
op
()
while
(undos[x℄.size
()
>
0)
undos[x℄.last
().undo
(this,
p)
undos[x℄.p
op
()
b
o
ol
Solver.assume
(lit
p)
trail
lim.push
(trail.size
())
return
enqueue
(p)
void
Solver.
an
el
()
int
=
trail.size
()
trail
lim.last
()
for
(;
!=
0;
)
undoOne
()
trail
lim.p
op
()
void
Solver.
an
elUntil
(int
lev
el)
while
(de
isionL
evel
()
>
lev
el)
an
el
()
Fig.
12.
assume():
returns
F
alse
if
immediate
onit.
Pre-ondition:
propaga-
tion
queue
is
empt
y
.
undoOne():
un
binds
the
last
v
ariable
on
the
trail.
an
el():
rev
erts
to
the
state
b
efore
last
push
().
Pre-ondition:
propagation
queue
is
empt
y
.
an
elUntil():
anels
sev
eral
lev
els
of
assumptions.
4.6
Ativit
y
heuristis
The
implemen
tation
of
ativit
y
is
sho
wn
in
Figure
14.
Instead
of
atually
m
ulti-
plying
all
v
ariables
b
y
a
dea
y
fator
after
ea
h
onit,
w
e
bump
v
ariables
with
larger
and
larger
n
um
b
ers.
Only
relativ
e
v
alues
matter.
Ev
en
tually
w
e
will
rea
h
the
limit
of
what
is
represen
table
b
y
a
oating
p
oin
t
n
um
b
er.
A
t
that
p
oin
t,
all
ativities
are
saled
do
wn.
In
the
V
arOr
der
data
t
yp
e
of
M
INI
S
AT
,
the
list
of
v
ariables
is
k
ept
sorted
on
ativit
y
at
all
time.
The
ba
ktra
king
will
alw
a
ys
aurately
ho
ose
the
most
ativ
e
v
ariable.
The
original
suggestion
for
the
VSIDS
dynami
v
ariable
ordering
w
as
to
sort
p
erio
dially
.
The
p
olarit
y
of
a
literal
is
ignored
in
M
INI
S
AT
.
Ho
w
ev
er,
storing
the
latest
[Disussion℄
p
olarit
y
of
a
v
ariable
migh
t
impro
v
e
the
sear
h
when
restarts
are
used,
but
it
remains
to
b
e
empirially
supp
orted.
F
urthermore,
the
in
terfae
of
V
arOr
der
an
b
e
used
for
other
v
ariable
heuristis.
In
S
ATZOO
,
an
initial
stati
v
ariable
order
omputed
from
the
lause
struture
w
as
partiularly
suessful
on
man
y
problems.
4.7
Constrain
t
remo
v
al
The
metho
ds
for
reduing
the
set
of
learn
t
lauses
as
w
ell
as
the
top-lev
el
sim-
pliation
pro
edure
an
b
e
found
in
Figure
15.
When
remo
ving
learn
t
lauses,
it
is
imp
ortan
t
not
to
remo
v
e
so
alled
lo
ke
d
lauses.
Lo
k
ed
lauses
are
those
partiipating
in
the
urren
t
ba
ktra
king
bran
h
b
y
b
eing
the
reason
(through
propagation)
for
a
v
ariable
assignmen
t.
The
redue
pro
edure
k
eeps
half
of
the
learn
t
lauses,
exept
for
those
whi
h
ha
v
e
dea
y
ed
b
elo
w
a
threshold
limit.
Su
h
lauses
an
o
ur
if
the
set
of
ativ
e
onstrain
ts
is
v
ery
small.
T
op-lev
el
simpliation
an
b
e
seen
as
a
sp
eial
ase
of
propagation.
Sine
[Disussion℄
17
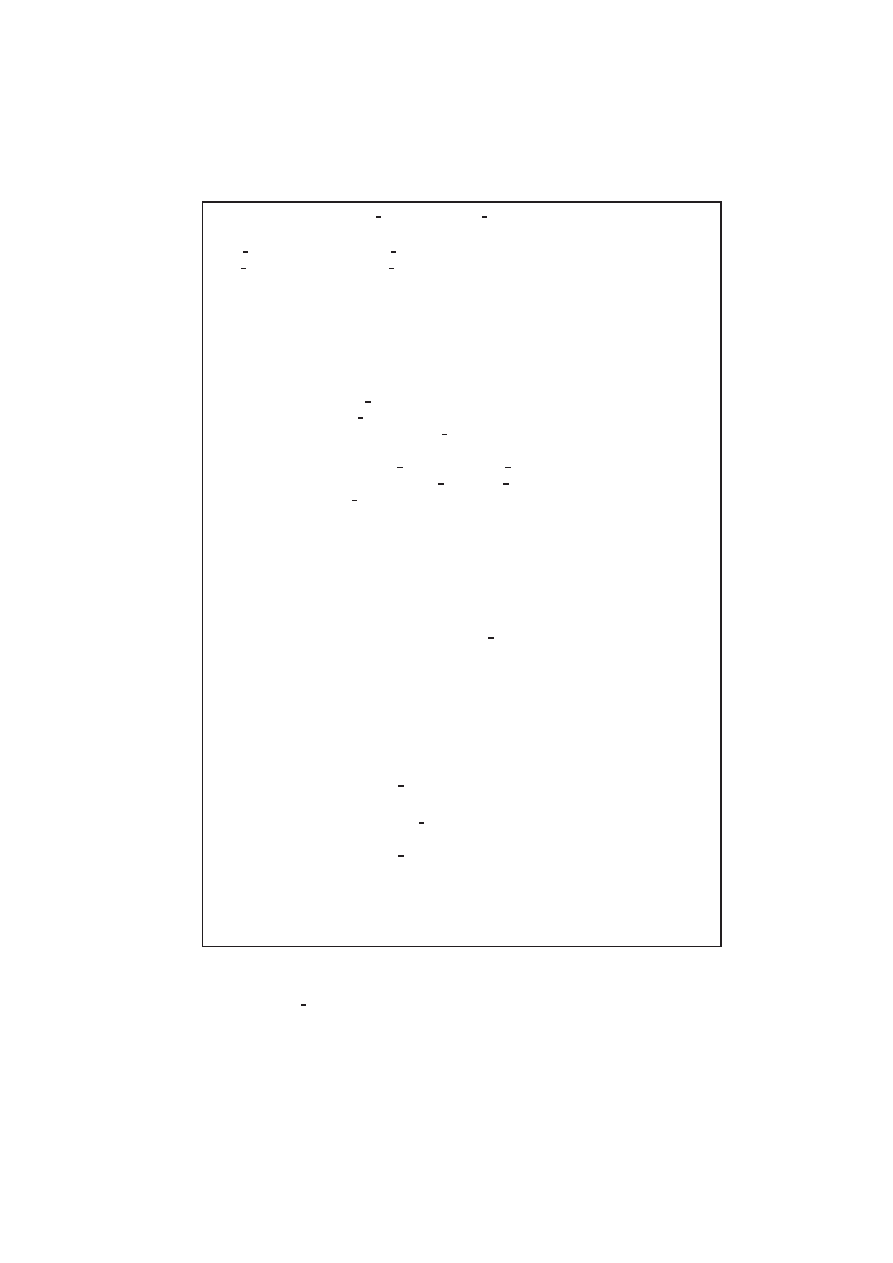
lb
o
ol
Solver.se
ar
h
(int
nof
onits,
int
nof
learn
ts,
Se
ar
hPar
ams
params)
int
onitC
=
0
v
ar
dea
y
=
1
/
params.v
ar
dea
y
la
dea
y
=
1
/
params.la
dea
y
mo
del.le
ar
()
lo
op
Constr
on
=
pr
op
agate
()
if
(on
!=
Null)
{
Conflit
onitC++
V
e
hlit
i
learn
t
lause
int
ba
ktra
k
lev
el
if
(de
isionL
evel
()
==
ro
ot
lev
el)
return
F
alse
?
analyze
(on,
learn
t
lause,
ba
ktra
k
lev
el)
an
elUntil
(max
(ba
ktra
k
lev
el,
ro
ot
lev
el))
r
e
or
d
(learn
t
lause)
de
ayA
tivities
()
else
{
No
onflit
if
(de
isionL
evel
()
==
0)
{
Simplify
the
set
of
pr
oblem
lauses:
simplifyDB
()
{
our
simplier
annot
r
eturn
false
her
e
if
(learn
ts.size
()
nAssigns
()
nof
learn
ts)
{
R
e
du
e
the
set
of
le
arnt
lauses:
r
e
du
eDB
()
if
(nAssigns
()
==
nV
ars
())
{
Mo
del
found:
mo
del.gr
owT
o
(nV
ars
())
for
(int
i
=
0;
i
<
nV
ars
();
i++)
mo
del[i℄
=
(value
(i)
==
Tr
ue
?
)
an
elUntil
(ro
ot
lev
el)
return
Tr
ue
?
else
if
(onitC
nof
onits)
{
R
e
ahe
d
b
ound
on
numb
er
of
onits:
an
elUntil
(ro
ot
lev
el)
{
for
e
a
r
estart
return
?
else
{
New
variable
de
ision:
lit
p
=
lit
(order.sele
t
())
{
may
have
heuristi
for
p
olarity
her
e
assume
(p)
{
annot
r
eturn
false
Fig.
13.
Sear
h
metho
d.
Assumes
and
propagates
un
til
a
onit
is
found,
from
whi
h
a
onit
lause
is
learn
t
and
ba
ktra
king
p
erformed
un
til
sear
h
an
on
tin
ue.
Pre-
ondition:
ro
ot
lev
el
==
de
isionL
evel
().
18
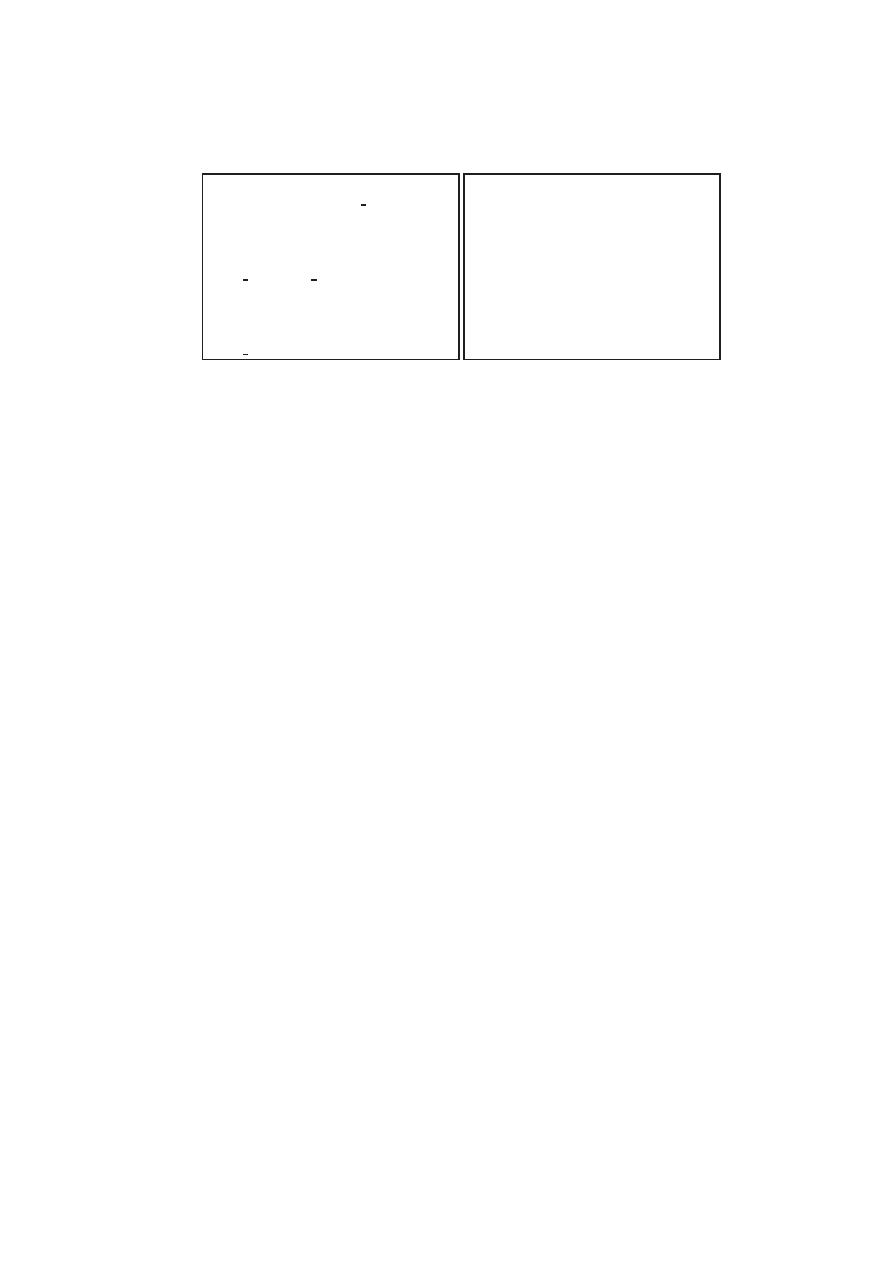
void
Solver.varBumpA
tivity
(var
x)
if
((ativit
y[x℄
+=
v
ar
in)
>
1e100)
varR
es
aleA
tivity
()
order.up
date
(x)
void
Solver.varDe
ayA
tivity
()
v
ar
in
*=
v
ar
dea
y
void
Solver.varR
es
aleA
tivity
()
for
(int
i
=
0;
i
<
nV
ars
();
i++)
ativit
y[i℄
*=
1e-100
v
ar
in
*=
1e-100
void
Solver.laBumpA
tivity
(
Clause
)
void
Solver.laDe
ayA
tivity
()
void
Solver.laR
es
aleA
tivity
()
{
Similarly
implemente
d.
void
Solver.de
ayA
tivities
()
varDe
ayA
tivity
()
laDe
ayA
tivity
()
Fig.
14.
Bumping
of
v
ariable
and
lause
ativities.
it
is
p
erformed
under
no
assumption,
an
ything
learn
t
an
b
e
k
ept
forev
er.
The
freedom
of
not
ha
ving
to
store
deriv
ed
information
separately
,
with
the
abilit
y
to
undo
it
later,
mak
es
it
easier
to
implemen
t
stronger
propagation.
4.8
T
op-lev
el
solv
er
The
metho
d
implemen
ting
M
INI
S
AT
's
top-lev
el
strategy
an
b
e
found
in
Figure
16.
It
is
resp
onsible
for
making
the
inremen
tal
assumptions
and
setting
the
ro
ot
lev
el.
F
urthermore,
it
ompletes
the
simple
ba
ktra
king
sear
h
with
restarts,
whi
h
are
p
erformed
less
and
less
frequen
tly
.
After
ea
h
restart,
the
n
um
b
er
of
allo
w
ed
learn
t
lauses
is
inreased.
The
o
de
on
tains
a
n
um
b
er
of
hand-tuned
onstan
ts
that
ha
v
e
sho
wn
to
p
er-
form
reasonable
on
our
appliations
[ES03
,CS03
℄.
The
top-lev
el
strategy
,
ho
w-
ev
er,
is
a
pro
dutiv
e
target
for
impro
v
emen
ts
(p
ossibly
appliation
dep
enden
t).
In
S
ATZOO
,
the
top-lev
el
strategy
on
tains
an
initial
phase
where
a
stati
v
ari-
able
ordering
is
used.
5
Conlusions
and
Related
W
ork
By
this
pap
er,
w
e
ha
v
e
pro
vided
a
minimal
referene
implemen
tation
of
a
mo
dern
onit-driv
en
SA
T-solv
er.
Despite
the
abstration
la
y
er
for
b
o
olean
onstrain
ts,
and
the
la
k
of
more
sophistiated
heuristis,
the
p
erformane
of
M
INI
S
AT
is
omparable
to
state-of-the-art
SA
T-solv
ers.
W
e
ha
v
e
tested
M
INI
S
AT
against
Z
C
HAFF
and
B
ERKMIN
5.61
on
177
SA
T-instanes.
These
instanes
w
ere
used
to
tune
S
ATZOO
for
the
SA
T
2003
Comp
etition.
As
S
ATZOO
solv
ed
more
instanes
and
series
of
problems,
ranging
o
v
er
all
three
ategories
(industrial,
handmade,
and
r
andom
),
than
an
y
other
solv
er
in
the
omp
etition,
w
e
feel
that
this
is
a
go
o
d
test-set
for
the
o
v
erall
p
erformane.
No
extra
tuning
w
as
done
in
M
INI
S
AT
;
it
w
as
just
run
one
with
the
onstan
ts
presen
ted
in
the
o
de.
A
t
a
time-out
of
10
min
utes,
M
INI
S
AT
solv
ed
158
instanes,
while
Z
C
HAFF
solv
ed
147
instanes
and
B
ERKMIN
157
instanes.
Another
approa
h
to
inremen
tal
SA
T
and
non-lausal
onstrain
ts
w
as
pre-
sen
ted
b
y
Aloul,
Ramani,
Mark
o
v,
and
Sak
allah
in
their
w
ork
on
S
ATIRE
and
PBS
[WKS01,ARMS02
℄.
Our
implemen
tation
diers
in
that
it
has
a
simpler
19
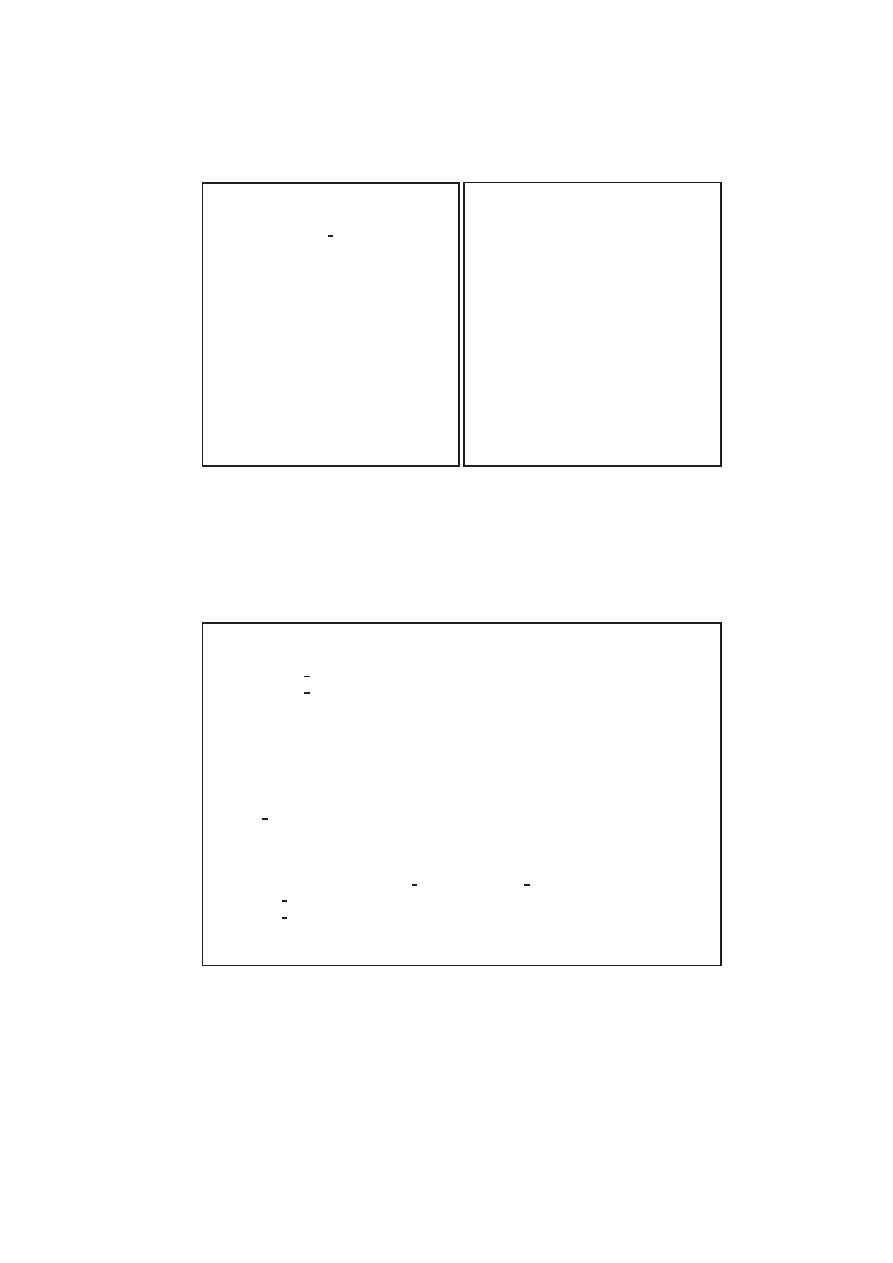
void
Solver.r
e
du
eDB
()
int
i,
j
double
lim
=
la
in
/
learn
ts.size()
sortOnA
tivity
(learn
ts)
for
(i=j=0;
i
<
learn
ts.size
()/2;
i++)
if
(!learn
ts[i℄.lo
ke
d
(this))
learn
ts[i℄.r
emove
(this)
else
learn
ts[j++℄
=
learn
ts[i℄
for
(;
i
<
learn
ts.size
();
i++)
if
(!learn
ts[i℄.lo
ke
d
(this)
&&
learn
ts[i℄.ativity
()
<
lim)
learn
ts[i℄.r
emove
(this)
else
learn
ts[j++℄
=
learn
ts[i℄
learn
ts.shrink
(i
j)
b
o
ol
Solver.simplifyDB
()
if
(pr
op
agate
()
!=
Null)
return
F
alse
for
(int
t
yp
e
=
0;
t
yp
e
<
2;
t
yp
e++)
V
e
hConstr
i
s
=
t
yp
e
?
(V
e
hConstr
i)learn
ts
:
onstrs
int
j
=
0
for
(int
i
=
0;
i
<
s.size
();
i++)
if
(s[i℄.simplify
(this))
s[i℄.r
emove
(this)
else
s[j++℄
=
s[i℄
s.shrink
(s.size
()
j)
r
eturn
Tr
ue
Fig.
15.
r
e
du
eDB():
Remo
v
e
half
of
the
learn
t
lauses
min
us
some
lo
k
ed
lauses.
A
lo
k
ed
lause
is
a
lauses
that
is
reason
to
a
urren
t
assignmen
t.
Clauses
b
elo
w
a
ertain
lo
w
er
b
ound
ativit
y
are
also
b
e
remo
v
ed.
simplifyDB():
T
op-lev
el
simplify
of
onstrain
t
database.
Will
remo
v
e
an
y
satised
onstrain
t
and
simplify
remaining
onstrain
ts
under
urren
t
(partial)
assignmen
t.
If
a
top-lev
el
onit
is
found,
F
alse
is
returned.
Pre-ondition:
Deision
lev
el
m
ust
b
e
zero.
P
ost-ondition:
Propagation
queue
is
empt
y
.
b
o
ol
Solver.solve
(V
e
hlit
i
assumps)
Se
ar
hPar
ams
params(0.95,
0.999)
double
nof
onits
=
100
double
nof
learn
ts
=
nConstr
aints
()/3
lb
o
ol
status
=
?
{
Push
inrement
al
assumptions:
for
(int
i
=
0;
i
<
assumps.size
();
i++)
if
(!assume
(assumps[i℄)
j
j
pr
op
agate
()
!=
Null)
an
elUntil
(0)
return
F
alse
ro
ot
lev
el
=
de
isionL
evel
()
{
Sol
ve:
while
(status
==
?)
status
=
se
ar
h
((int
)nof
onits,
(int
)nof
learn
ts,
params)
nof
onits
*=
1.5
nof
learn
ts
*=
1.1
anelUn
til(0)
return
status
==
Tr
ue
?
Fig.
16.
Main
solv
e
metho
d.
Pre-ondition:
If
assumptions
are
used,
simplifyDB
()
m
ust
b
e
alled
righ
t
b
efore
using
this
metho
d.
If
not,
a
top-lev
el
onit
(resulting
in
a
non-usable
in
ternal
state)
annot
b
e
distinguished
from
a
onit
under
assumptions.
20

notion
of
inremen
talit
y
,
and
that
it
on
tains
a
w
ell
do
umen
ted
in
terfae
for
non-lausal
onstrain
ts.
Finally
,
a
set
of
referene
implemen
tations
of
mo
dern
SA
T-te
hniques
is
presen
t
in
the
O
PEN
SAT
pro
jet.
3
Ho
w
ev
er,
the
pro
jet
aim
for
ompleteness
rather
than
minimal
exp
osition,
as
w
e
ha
v
e
hosen
in
this
pap
er.
6
Exerises
1.
W
rite
the
o
de
for
an
A
tMost
onstrain
t.
The
onstrain
t
is
satised
if
at
most
n
out
of
m
sp
eied
literals
are
true.
2.
Implemen
t
a
generator
for
(generalized)
pigeon-hole
form
ulas
using
the
new
onstrain
ts.
The
generator
should
tak
e
three
argumen
ts:
n
um
b
er
of
pigeons,
n
um
b
er
of
holes,
and
hole
apait
y
.
Ea
h
pigeon
m
ust
reside
in
some
pigeon-
hole.
No
hole
ma
y
on
tain
more
pigeons
than
its
apait
y
.
3.
Mak
e
an
inremen
tal
v
ersion
that
adds
one
pigeon
to
the
problem
at
a
time
un
til
the
problem
b
eomes
unsatisable.
Referenes
[ARMS02℄
F.
Aloul,
A.
Ramani,
I.
Mark
o
v,
K.
Sak
allah.
\Generi
ILP
vs.
Sp
e-
ialized
0-1
ILP:
an
Up
date"
in
International
Confer
en
e
on
Computer
A
ide
d
Design
(ICCAD),
2002.
[BCCFZ99℄
A.
Biere,
A.
Cimatti,
E.M.
Clark
e,
M.
F
ujita,
Y.
Zh
u.
\Sym
b
oli
Mo
del
Che
king
using
SA
T
pro
edures
instead
of
BDDs"
in
Pr
o
e
e
dings
of
Design
A
utomation
Confer
en
e
(D
A
C'99),
1999.
[CS03℄
K.
Claessen,
N.
S
orensson.
\New
T
e
hniques
that
Impro
v
e
MA
CE-st
yle
Finite
Mo
del
Finding"
in
CADE-19,
Workshop
W4.
Mo
del
Computation
{
Priniples,
A
lgorithms,
Appli
ations,
2003.
[DLL62℄
M.
Da
vis,
G.
Logemann,
D.
Lo
v
eland.
\A
ma
hine
program
for
theorem
pro
ving"
in
Communi
ations
of
the
A
CM,
v
ol
5,
1962.
[ES03℄
N.
E
en,
N.
S
orensson.
\T
emp
oral
Indution
b
y
Inremen
tal
SA
T
Solv-
ing"
in
Pr
o
.
of
First
International
Workshop
on
Bounde
d
Mo
del
Che
king,
2003.
ENTCS
issue
4
v
olume
89.
[Lar92℄
T.
Larrab
ee.
\T
est
P
attern
Generation
Using
Bo
olean
Satisabilit
y"
in
IEEE
T
r
ansations
on
Computer-A
ide
d
Design,
v
ol.
11-1,
1992.
[MS96℄
J.P
.
Marques-Silv
a,
K.A.
Sak
allah.
\GRASP
{
A
New
Sear
h
Algorithm
for
Satisabilit
y"
in
ICCAD.
IEEE
Computer
So
iety
Pr
ess,
1996
[MZ01℄
M.W.
Mosk
ewiz,
C.F.
Madigan,
Y.
Zhao,
L.
Zhang,
S.
Malik.
\Cha:
Engi-
neering
an
EÆien
t
SA
T
Solv
er"
in
Pr
o
.
of
the
38
th
Design
A
utomation
Confer
en
e,
2001.
[Stri00℄
O.
Stri
hman
\T
uning
SA
T
he
k
ers
for
Bounded
Mo
del
Che
king"
in
Pr
o
.
of
12
th
Intl.
Conf.
on
Computer
A
ide
d
V
eri
ation,
LNCS:1855,
Springer-V
erlag
2000
[WKS01℄
J.
Whittemore,
J.
Kim,
K.
Sak
allah.
\SA
TIRE:
A
New
Inremen
tal
Satisabilit
y
Engine"
in
Pr
o
.
38th
Conf.
on
Design
A
utomation,
A
CM
Press
2001.
[ZM01℄
L.
Zhang,
C.F.
Madigan,
M.W.
Mosk
ewiz,
S.
Malik.
\EÆien
t
Conit
Driv
en
Learning
in
Bo
olean
Satisabilit
y
Solv
er"
in
Pr
o
.
of
the
In-
ternational
Confer
en
e
on
Computer
A
ide
d
Design
(ICCAD),
2001.
3
h
ttp://www.op
ensat.org
21
App
endix
{
What
is
missing
from
Satzo
o?
In
order
to
redue
the
size
of
M
INI
S
AT
to
a
minim
um,
all
non-essen
tial
parts
of
S
ATZOO
/
S
ATNIK
w
ere
left
out.
Sine
S
ATZOO
w
on
t
w
o
ategories
of
the
SA
T
2003
Comp
etition,
w
e
hose
to
presen
t
the
missing
parts
here
for
ompleteness.
Initial
strategies:
Burst
of
r
andom
variable
or
ders.
Before
an
ything
else,
S
ATZOO
runs
sev
eral
passes
of
ab
out
10-100
onits
ea
h
with
the
v
ariable
order
initiated
to
random.
F
or
satisable
problems,
S
ATZOO
an
sometimes
stum
ble
up
on
the
solution
b
y
this
strategy
.
F
or
hard
(t
ypially
unsatisable)
problems,
imp
or-
tan
t
lauses
an
b
e
learn
t
in
this
phase
that
is
outside
the
"lo
al
optim
um"
that
the
ativit
y
driv
en
v
ariable
heuristi
will
later
get
stu
k
in.
Stati
variable
or
dering.
The
seond
phase
of
S
ATZOO
is
to
ompute
a
stati
v
ariable
ordering
taking
in
to
aoun
t
ho
w
the
v
ariables
of
dieren
t
lauses
relates
to
ea
h
other
(see
Figure
17).
V
ariables
often
o
urring
together
in
lauses
will
b
e
put
lose
in
the
v
ariable
order.
S
ATZOO
uses
this
stati
or-
dering
for
at
least
5000
onits
and
do
es
not
stop
un
til
progress
is
halted
sev
erely
.
The
stati
ordering
often
oun
ters
the
eet
of
"sh
uing"
the
prob-
lem
(
hanging
the
order
of
lauses).
The
authors
b
eliev
e
this
phase
to
b
e
the
most
imp
ortan
t
feature
left
out
of
M
INI
S
AT
,
and
an
imp
ortan
t
part
of
the
suess
of
S
ATZOO
in
the
omp
etition.
4
Extra
v
ariable
deision
heuristis:
V
ariable
of
r
e
ent
imp
ortan
e.
Inspired
b
y
the
SA
T-solv
er
B
ERKMIN
,
o
a-
sionally
v
ariables
from
reen
t
(unsatised)
reorded
lauses
are
pi
k
ed.
R
andom.
Ab
out
1%
of
the
time,
a
random
v
ariable
is
seleted
for
bran
hing.
This
simple
strategy
seems
to
ra
k
some
extra
problems
without
inurring
an
y
substan
tial
o
v
erhead
for
other
problems.
Giv
e
it
a
try!
Other:
Equivalent
variable
substitution.
The
binary
lauses
are
he
k
ed
for
yli
impliations.
If
a
yle
is
found,
a
represen
tativ
e
is
seleted
and
all
other
v
ariables
in
the
yle
is
replaed
b
y
this
represen
tativ
e
in
the
lause
database.
This
yields
a
smaller
database
and
few
er
v
ariables.
The
simpliation
is
done
p
erio
dially
,
but
is
most
imp
ortan
t
in
the
initial
phase
(some
problems
an
b
e
v
ery
redundan
t).
Garb
age
ol
le
tion.
S
ATZOO
implemen
ts
its
o
wn
memory
managemen
t
whi
h
allo
ws
lauses
to
b
e
stored
more
ompatly
.
0-1-pr
o
gr
amming.
Pseudo-b
o
olean
onstrain
ts
are
supp
orted
b
y
S
ATZOO
.
This
an
of
ourse
easily
b
e
added
to
M
INI
S
AT
through
the
onstrain
t
in-
terfae.
4
The
pro
vided
o
de
urren
tly
has
no
further
motiv
ation
b
ey
ond
the
authors'
in
tuition.
Indeed
it
w
as
added
as
a
qui
k
ha
k
t
w
o
da
ys
b
efore
the
omp
etition.
22
void
Solver.statiV
arOr
der
()
{
Clear
a
tivity:
for
(int
i
=
0;
i
<
nV
ars
();
i++)
ativit
y[i℄
=
0
{
Do
simple
v
ariable
a
tivity
heuristi:
for
(int
i
=
0;
i
<
lauses.size
();
i++)
Clause
=
lauses[i℄
double
add
=
p
ow2
(
size
())
for
(int
j
=
0;
j
<
size
();
j++)
ativit
y[var
([j℄)℄
+=
add
{
Calula
te
the
initial
"hea
t"
of
all
la
uses:
V
e
hV
e
hint
ii
o
urs(2*nV
ars
())
{
Map
liter
al
to
list
of
lause
indi
es
V
e
hPair
hdouble
,int
ii
heat(lauses.size
())
{
Pairs
of
he
at
and
lause
index
for
(int
i
=
0;
i
<
lauses.size
();
i++)
Clause
=
lauses[i℄
double
sum
=
0
for
(int
j
=
0;
j
<
size
();
j++)
o
urs[index
([j℄)℄.push
(i)
sum
+=
ativit
y[var
([j℄)℄
heat[i℄
=
Pair
new
(sum,
i)
{
Bump
hea
t
f
or
la
uses
whose
v
ariables
our
in
other
hot
la
uses:
double
iter
size
=
0
for
(int
i
=
0;
i
<
lauses.size
();
i++)
Clause
=
lauses[i℄
for
(int
j
=
0;
j
<
size
();
j++)
iter
size
+=
o
urs[index
([j℄)℄.size
()
int
iterations
=
min
((int
)(((double
)literals
/
iter
size)
*
100),
10)
double
disapation
=
1.0
/
iterations
for
(int
=
0;
<
iterations;
++)
for
(int
i
=
0;
i
<
lauses.size
();
i++)
Clause
=
lauses[i℄
for
(int
j
=
0;
j
<
size
();
j++)
V
e
hint
i
os
=
o
urs[index
([j℄)℄
for
(int
k
=
0;
k
<
os.size
();
k++)
heat[i℄.fst
+=
heat[os[k℄℄.fst
*
disapation
{
Set
a
tivity
a
ording
to
hot
la
uses:
sort
(heat)
for
(int
i
=
0;
i
<
nV
ars
();
i++)
ativit
y[i℄
=
0
double
extra
=
1e200
for
(int
i
=
0;
i
<
heat.size
();
i++)
Clause
&
=
lauses[heat[i℄.snd℄
for
(int
j
=
0;
j
<
size
();
j++)
if
(ativit
y[var
([j℄)℄
==
0)
ativit
y[var
([j℄)℄
=
extra
extra
*=
0.995
order.up
dateA
l
l
()
v
ar
in
=
1
Fig.
17.
The
stati
v
ariable
ordering
of
S
ATZOO
.
The
o
de
is
dened
only
for
lauses,
not
for
arbitrary
onstrain
ts.
It
m
ust
b
e
adapted
b
efore
it
an
b
e
used
in
M
INI
S
AT
.
23
Wyszukiwarka
Podobne podstrony:
5000 FREE SAT Words Learn an Ivy League Vocabulary SAT Prep Private Tuto
941262 an 01 pl Wykrywacz satelitarny SAT Finder
An Analytical Extension of the Critical Energy Criterion Used to Predict Bare Explosive Response to
Wykład 5 An wsk cz II
An%20Analysis%20of%20the%20Data%20Obtained%20from%20Ventilat
NLP for Beginners An Idiot Proof Guide to Neuro Linguistic Programming
02 01 11 11 01 44 an kol2 1 7id 3881
50 Common Birds An Illistrated Guide to 50 of the Most Common North American Birds
Pytania ze sprawdzianow z satki, gik VI sem, GiK VI, SAT, kolos 1GS
Intellivox AN Evac
(1 1)Fully Digital, Vector Controlled Pwm Vsi Fed Ac Drives With An Inverter Dead Time Compensation
Interruption of the blood supply of femoral head an experimental study on the pathogenesis of Legg C
an 04 2012
Intellivox AN Speech
Zizek, Slavoj Looking Awry An Introduction to Jacques Lacan through Popular Culture
an 11 2011
How to make an inexpensive exte Nieznany
Analysis of soil fertility and its anomalies using an objective model
więcej podobnych podstron