
2ET-DI-L2
Rzeszów, 16.11.2015 r.
Michał Kucharski
Kinga Łakomy
Łukasz Ślimak
Mateusz Winiarski
Damian Woźniak
SPRAWOZDANIE
Z MEMS I MIKRONAPĘDY
ĆWICZENIE I
,,Sterowanie silnika skokowego
reluktancyjnego’’
I.
Wprowadzenie do ćwiczenia
Celem ćwiczenia jest zapoznanie się z budową silnika skokowego
reluktancyjnego, sposobem sterowania oraz wyznaczeniem jego charakterystyk
dynamicznych. Silnik skokowy reluktancyjny z uwagi na swą budowę
najczęściej zasilany jest unipolarnie. Najprostszym sposobem jego sterowania
jest sterowanie napięciowe. W takim przypadku napięcie zasilające jest
podawane na poszczególne pasma bez żadnych ograniczeń. Jest to przydatne w
zakresie małych częstotliwości pracy. Wraz ze wzrostem częstotliwości
taktowania prądy nie osiągają już wartości ustalonych.
Stosowanie ,,forsowania wzbudzenia” zapobiega zatrzymaniu silnika kiedy
ograniczony zostanie wytworzony moment spowodowany zbyt małym prądem.
Polega ono na zwiększeniu napięic a i dołączeniu rezystancji R
ad
ograniczającej
prąd do wartości znamionowej.
Silniki skokowe wykorzystywane są w precyzyjnych sterowaniach ruchem,
przekształcają one ciąg impulsów na ciąg przesunięć kątowych lub liniowych.
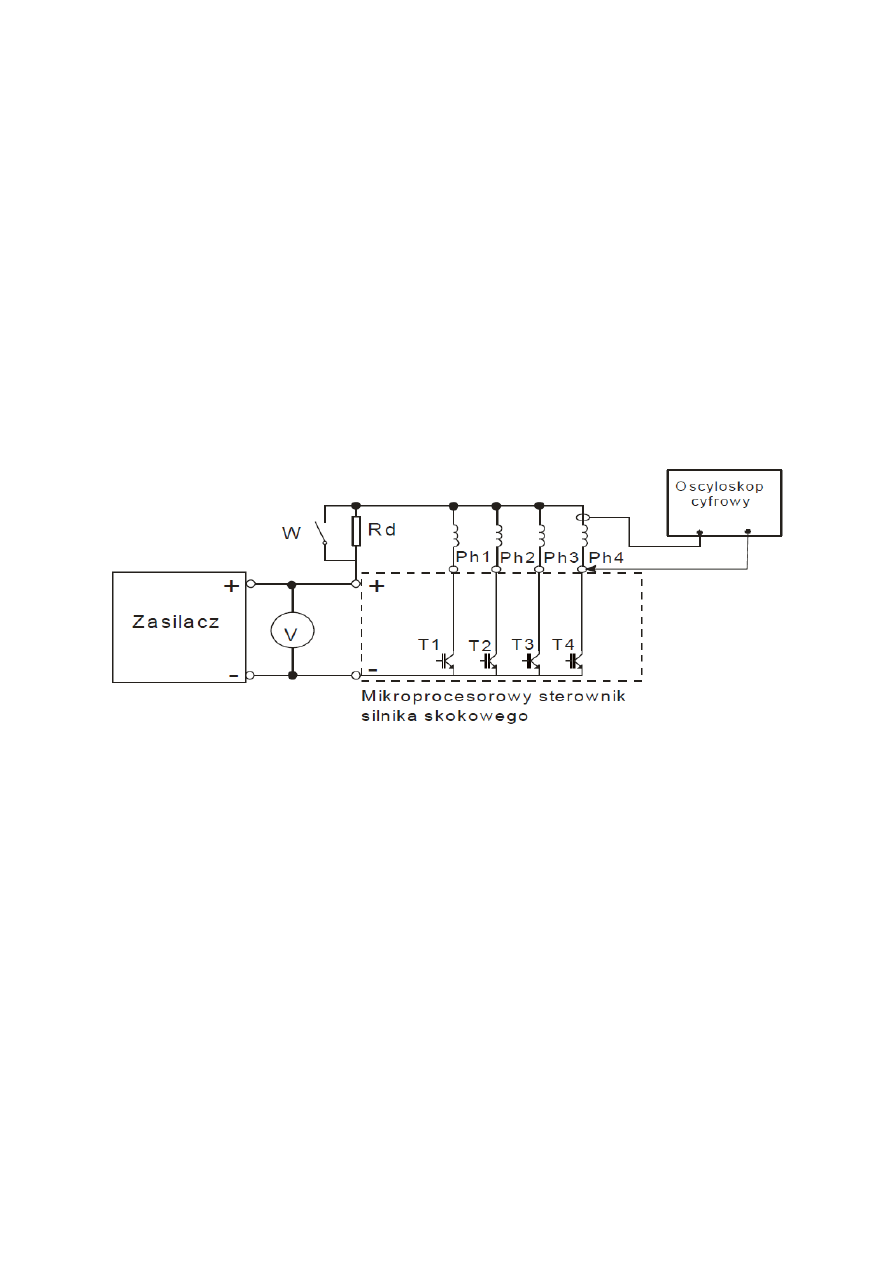
II. Schemat
III. Parametry znamionowe czteropasmowego silnika
skokowego EDS20:
napięcie znamionowe
= 15 ,
prąd znamionowy
= 3.7 ,
pobór mocy
= 120 ,
skok znamionowy
= 3°,
moment znamionowy
= 4
,
maksymalny moment synchronizujący
= 10
,
moment rozruchowy
= 71
,
moment bezwładności wirnika
= 53300 ∗ 10
,
rezystancja pasma
= 3.95 Ω,
impedancja pasma
= 30.5 Ω,
częstotliwość graniczna
= 75
.
Układ sterowania silnika zbudowano w oparciu o układ mikroprocesora 8-bitowego.
Umożliwia ona płynną zmianę częstotliwości podawanych impulsów, zmianę kierunku
wirowania oraz komutowanie uzwojeń w sekwencji 1/4, 1/2 i 3/8.
IV. Tabele pomiarowe i obliczenia
Obliczanie momentu obciążenia:
=
× =
, gdzie:
r = 0.1m,
m → masa obciążników [kg],
g ≈ 9.8
m
s
→ przyśpieszenie ziemskie.
Dla:
m = 0.1 kg
T = 0.1 × 9.8 × 0.1 = 0.098
m = 0.3 kg
T = 0.3 × 9.8 × 0.1 = 0.294
m = 0.5 kg
T = 0.5 × 9.8 × 0.1 = 0.49
m = 0.7 kg
T = 0.7 × 9.8 × 0.1 = 0.686
m = 0.9 kg
T = 0.9 × 9.8 × 0.1 = 0.882
m = 1.1 kg
T = 1.1 × 9.8 × 0.1 = 1.078
m = 1.3 kg
T = 1.3 × 9.8 × 0.1 = 1.274
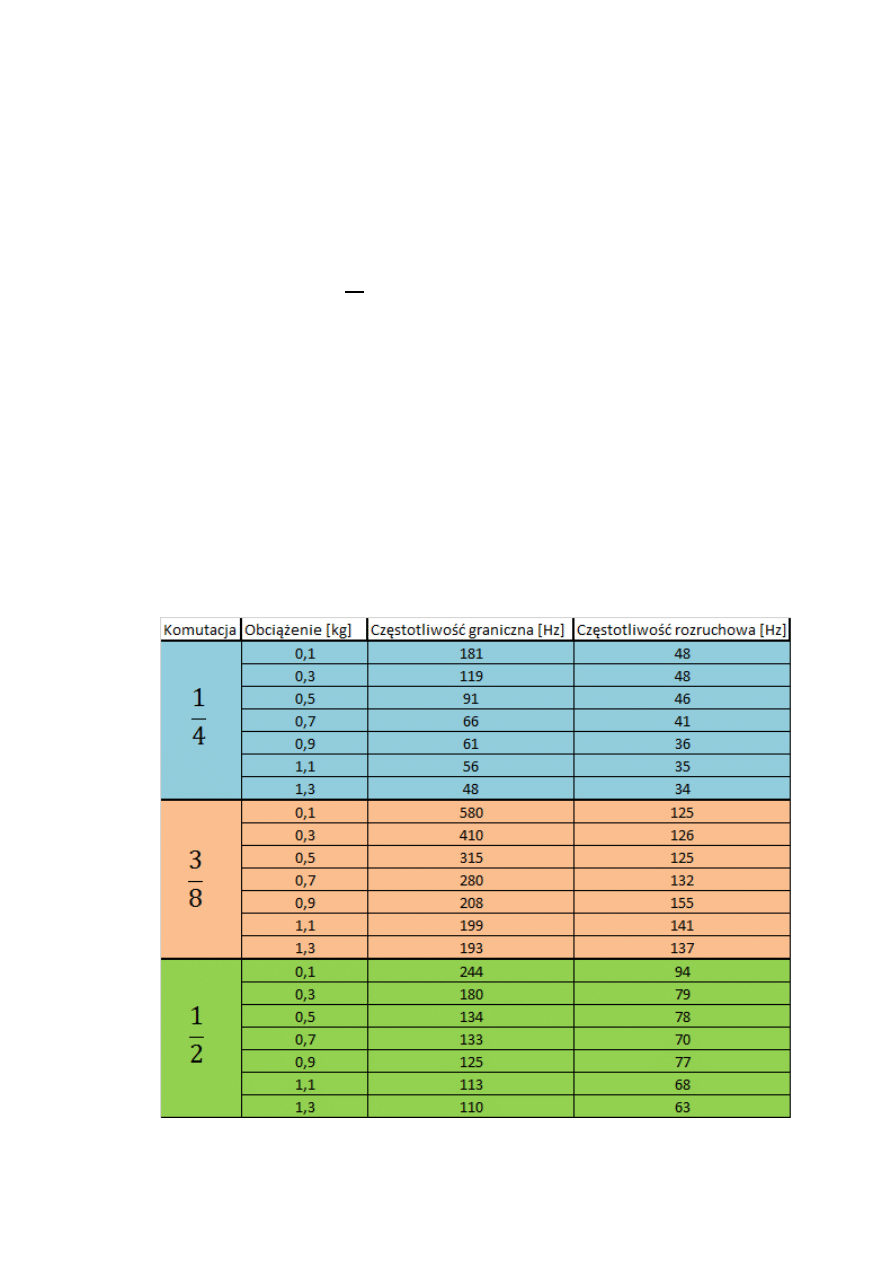
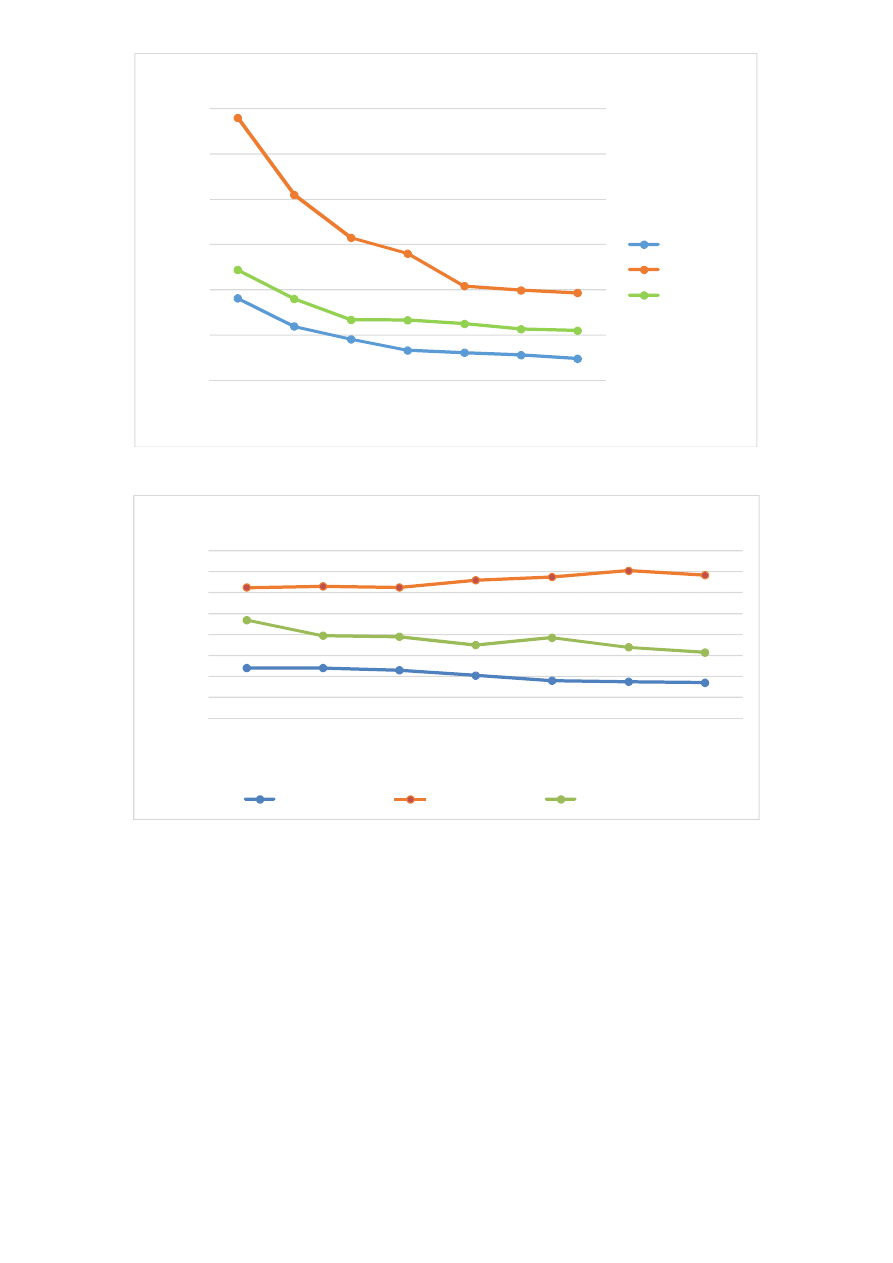
a) Pomiary częstotliwości granicznej
= (
) oraz rozruchowej
= (
) przy
=
:
0
100
200
300
400
500
600
0,098
0,294
0,49
0,686
0,882
1,078
1,274
f
[H
z]
T
L
[Nm]
f
g
= f (T
L
)
Komutacja 1/4
komutacja 3/8
Komutacja 1/2
0
20
40
60
80
100
120
140
160
0,098
0,294
0,49
0,686
0,882
1,078
1,274
f
l
[H
z]
T
L
[Nm]
f
l
= f (T
L
)
Komutacja 1/4
Komutacja 3/8
Komutacja 1/2
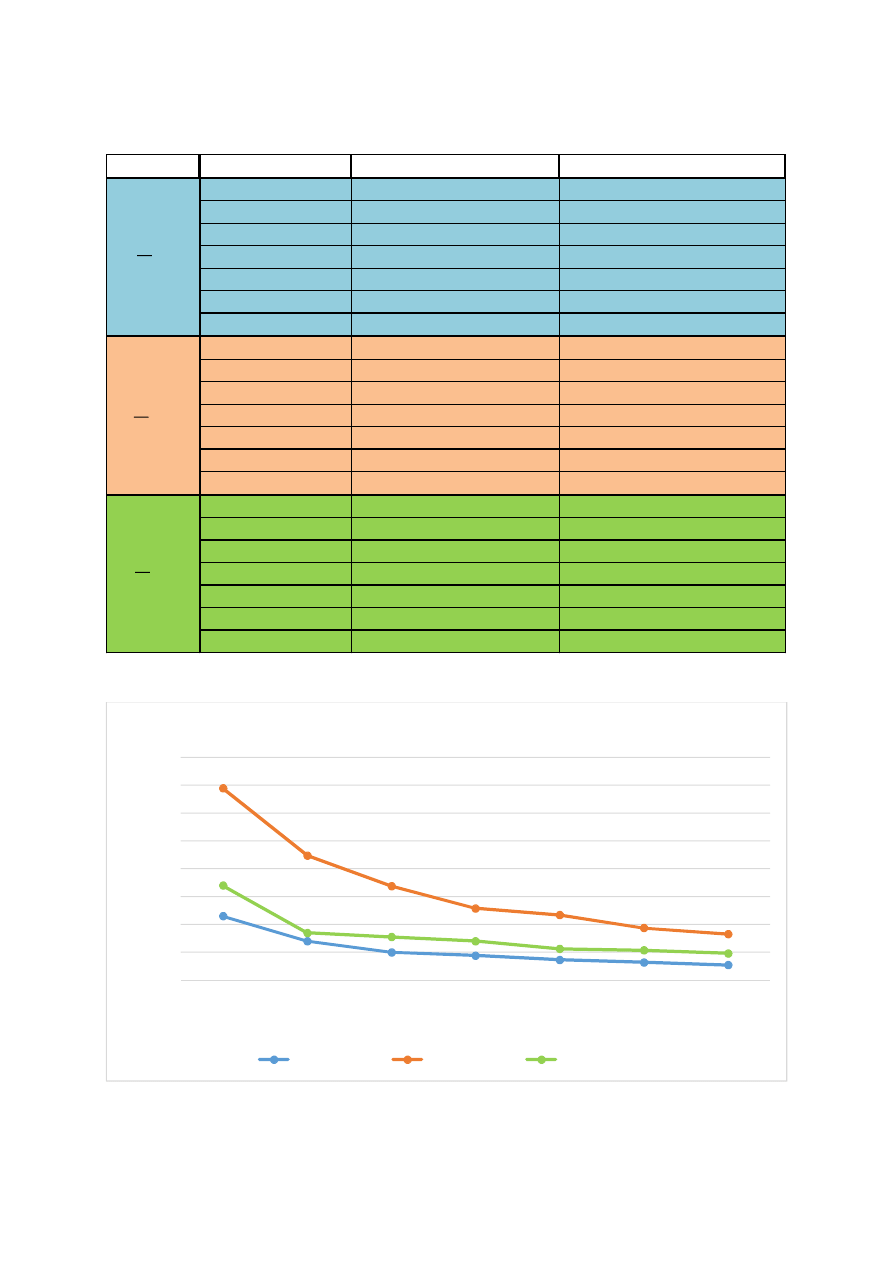
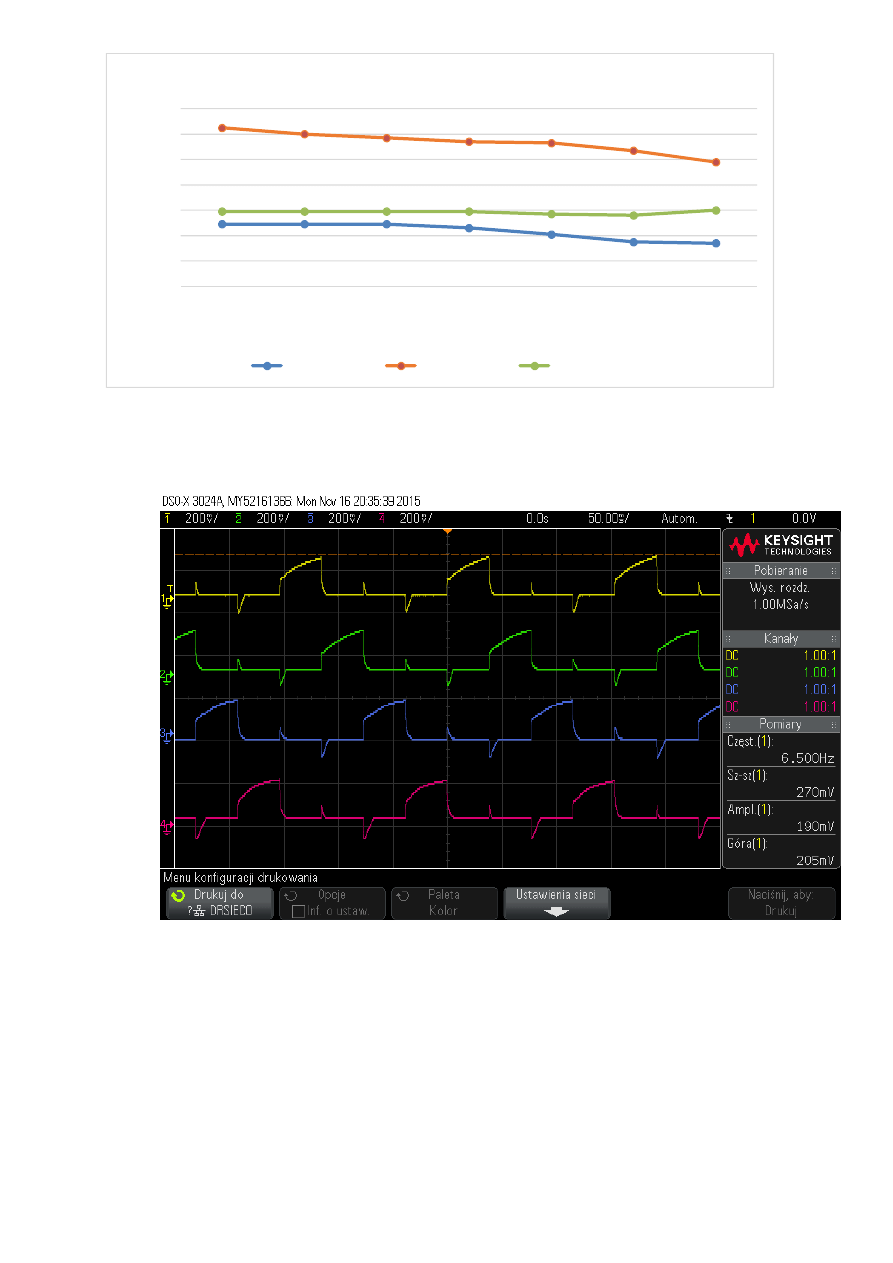
b) Pomiary częstotliwości granicznej
= (
) oraz rozruchowej
= (
) w warunkach forsowania wzbudzenia
=
oraz
≈ Ω:
Komutacja
Obciążenie [kg]
Częstotliwość graniczna [Hz] Częstotliwość rozruchowa [Hz]
0,1
230
49
0,3
140
49
0,5
100
49
0,7
88
46
0,9
73
41
1,1
64
35
1,3
54
34
0,1
689
125
0,3
448
120
0,5
338
117
0,7
258
114
0,9
234
113
1,1
187
107
1,3
165
98
0,1
340
59
0,3
170
59
0,5
155
59
0,7
140
59
0,9
112
57
1,1
107
56
1,3
96
60
1
4
3
8
1
2
0
100
200
300
400
500
600
700
800
0,098
0,294
0,49
0,686
0,882
1,078
1,274
f
g
[H
z]
T
L
[Nm]
f
g
=f(T
L
)
Komutacja 1/4
Komutacja 3/8
Komutacja 1/2
V. Przebiegi czasowe na oscyloskopie w 26 Hz:
a) Dla komutacji 1/4:
0
20
40
60
80
100
120
140
0,098
0,294
0,49
0,686
0,882
1,078
1,274
f
l
[H
z]
T
L
[Nm]
f
l
=f(T
L
)
Komutacja 1/4
Komutacja 3/8
Komutacja 1/2
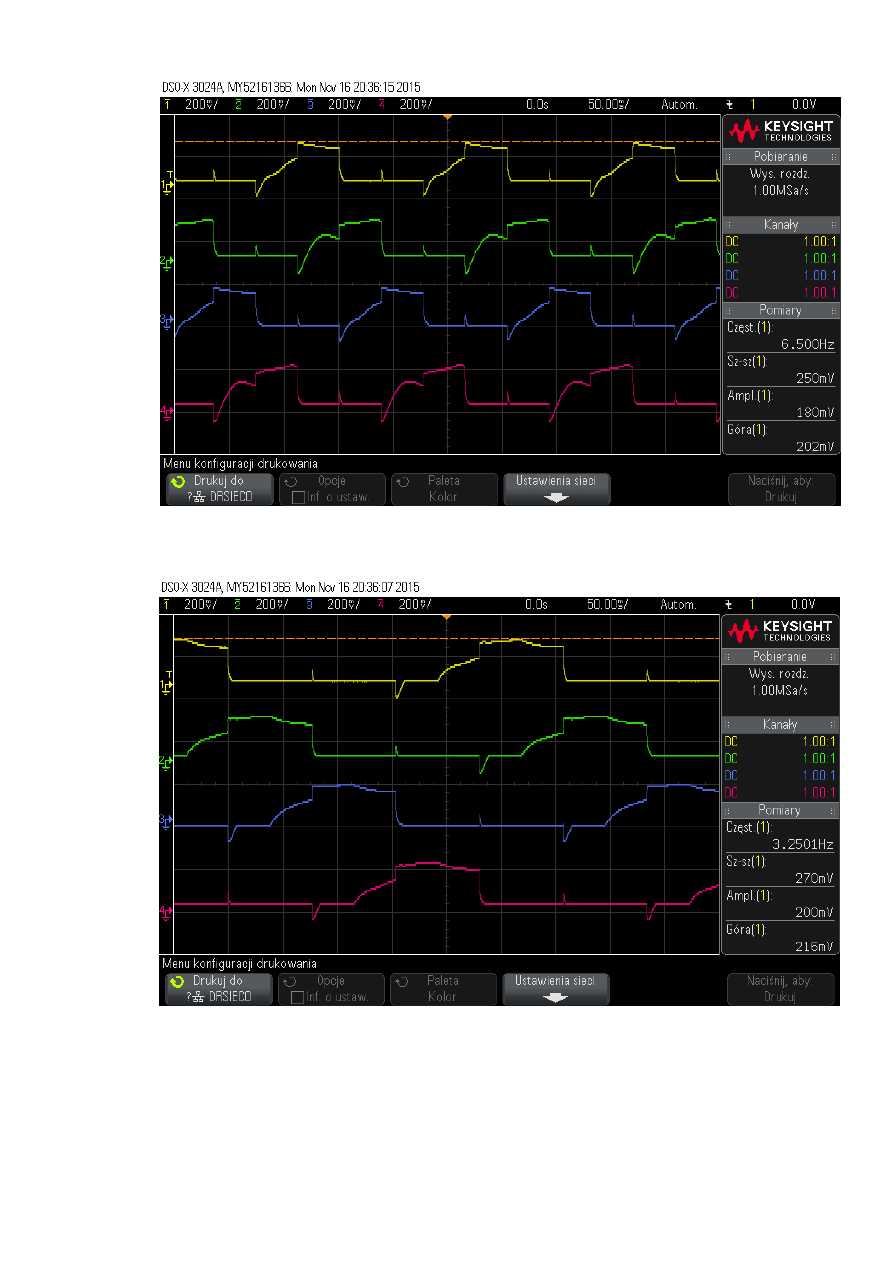
b) Dla komutacji 1/2:
c) Dla komutacji 3/8:

VI. Wnioski:
Częstotliwość graniczna to częstotliwość przy której następuje zatrzymanie
silnika z przymocowanym obciążeniem.
Częstotliwość rozruchowa to częstotliwość przy której następuje ciągła praca
silnika z przymocowanym obciążeniem.
Na podstawie otrzymanych wykresów zauważamy zmiany częstotliwości
granicznych i rozruchowy w zależności od zmian momentu obciążenia silnika.
Mają one duży wpływ na wartości częstotliwości granicznej a mniejszy na
zmianę częstotliwości rozruchowej. Przy komutacji 3/8 częstotliwości osiągają
największe wartości a najmniejsze przy komutacji 1/4.
Przy zwiększeniu wartości napięcia zasilającego do 15 V i jednoczesnym
dołączeniu dodatkowej rezystancji Rd kształt przebiegów jest podobny jak przy
napięciu zasilania 12 V.
Wyszukiwarka
Podobne podstrony:
lab2 cw1
Sprawozdanie ĆW1 MEMS
Matlab cw1 2 zaoczni
ćw1 Maszyna turinga
zestaw di 3 05
Napęd mieszadła ślimakowego projekt, OBL
Kucharz
I9M1S1 Nawrot Gudanowicz lab2
IWP JP2 Lab2 Struktury
Ćwiczenie 01 EN DI
ekoprzygody ślimaka Tośka(1)
Lab2 OZE id 259328 Nieznany
MZ TZrokII cw1(1)
Napęd mieszadła ślimakowego projekt, 3
Kucharz małej gastronomii 512202
il gioco e di tutti
ćw1
cw1 modelowanie id 122786 Nieznany
cw1
więcej podobnych podstron