
Mateusz Niedziółka – IV rok
Koło Naukowe Techniki Cyfrowej
dr inż. Wojciech Mysiński – opiekun naukowy
CAN BUS IN MOTORIZATION.
The topic of this article will be using CAN bus in motorization. This is a very popular advice also
use in spheres like industrial automation, robotics. We owe its commonness to easy
implementation, low costs of production and high protection against errors.
MAGISTRALA CAN W MOTORYZACJI.
Tematem tego artykułu będzie zastosowanie magistrali CAN w motoryzacji. Jest ona powszechnie
wykorzystywana w różnego rodzaju dziedzinach takich jak: automatyka przemysłowa, robotyka i
tym podobne. Jej powszechność zawdzięczamy przede wszystkim łatwą implementacją, niskimi
kosztami produkcji i wysoką ochroną przed błędami.
Keywords: network, motorization, automation, bus, protocol, topology
Słowa kluczowe: sieć, motoryzacja, automatyka, magistrala, protokół, topologia
1. ZARYS HISTORYCZNY.
Powstała na początku lat 80. Jest to magistrala szeregowa. Nazwa ta obejmuje zarówno
protokół komunikacyjny jak i samą magistralę. Protokół określa sposób przesyłania danych.
Na początku ta magistrala była stosowana w głównie przemyśle jednak później firma Bosch
wpadła na pomysł by wykorzystać jej zalety w samochodach. Idea narodziła się z powodu bardzo
szybkiego rozwoju motoryzacji na początku lat 80. Spowodowało to potrzebę coraz to lepszych i
bardziej innowacyjnych systemów sterowania podzespołów elektronicznych w samochodach.
W 1987 roku pojawiły się pierwsze chipy CAN wyprodukowane przez firmę Intel. 5 lat później na
rynek wchodzi pierwszy Mercedes z magistralą CAN. Był to faktyczny początek zastosowania
nowej magistrali w motoryzacji. W 1993 roku został opublikowany standard ISO11898, który
zawiera opis warstwy fizycznej jak i warstwy łącza danych dla magistrali CAN, czyli rzeczy
takich jak np. poziomy napięć, szybkość przesyłania danych
[10]
.
2. CONTROLLER AREA NETWORK.
Magistrala CAN nie korzysta ze standardowych poziomów logicznych „0”, „1”
[5]
. Mamy tu do
czynienia z dwoma stanami: dominującym i recesywnym. Stan dominujący może zasłonić stan
recesywny na linii. Ma to zapewnić poprawną transmisję podczas próby nadawania sygnału przez
dwa urządzenia. Poziom dominujący ma wyższy priorytet niż poziom recesywny. Dzięki temu
podczas próby jednoczesnej transmisji bitu dominującego i recesywnego przez dwa różne
urządzenia otrzymuje się zawsze poziom dominujący i – co najważniejsze – nie nastąpi przy tym
zakłócenie transmisji
[6]
.
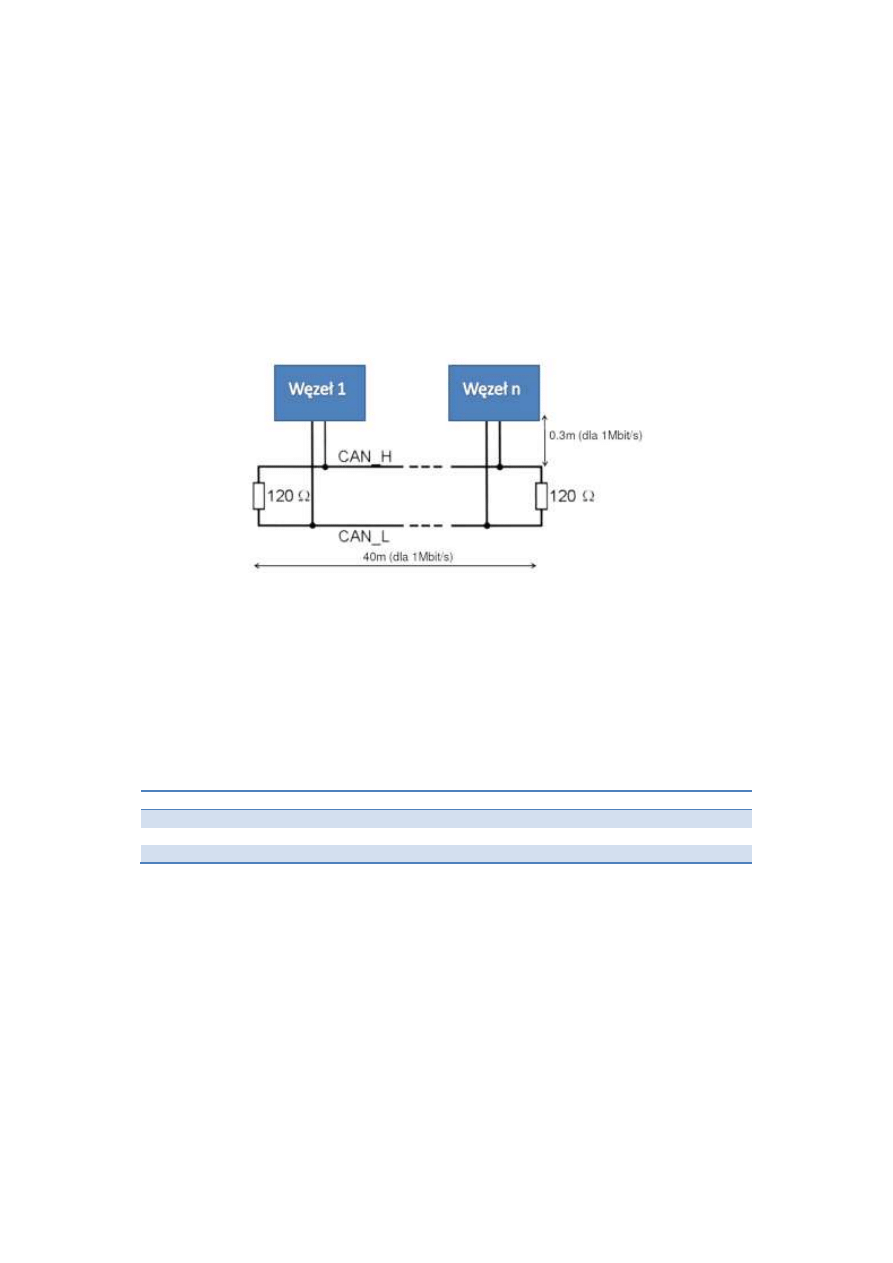
Rys. 1 Topologia sieci CAN
[1]
Na rys. 1. mamy zarys topologii sieci CAN. Wartości prędkości, długości przewodów jak i
rezystorów są dobrane według standardu ISO11898. Jak widzimy prędkość 1Mbit/s możemy
osiągnąć nie przekraczając długości 40m. Natomiast długość przewodu, który idzie do urządzenia
nie powinna przekraczać 30cm. Poniżej w tabeli widzimy poziomy napięć według ISO11898 dla
stanu recesywnego i stanu dominującego.
Tab. 1. Poziomy napięć dla sieci CAN w standardzie ISO 11898
[1]
.
Stan recesywny („1”)
Stan dominujący („0”)
minimalnie
nominalnie
maksymalnie
minimalnie
nominalnie
maksymalnie
H
2.0
2.5
3.0
2.75
3.5
4.5
L
2.0
2.5
3.0
0.5
1.5
2.25
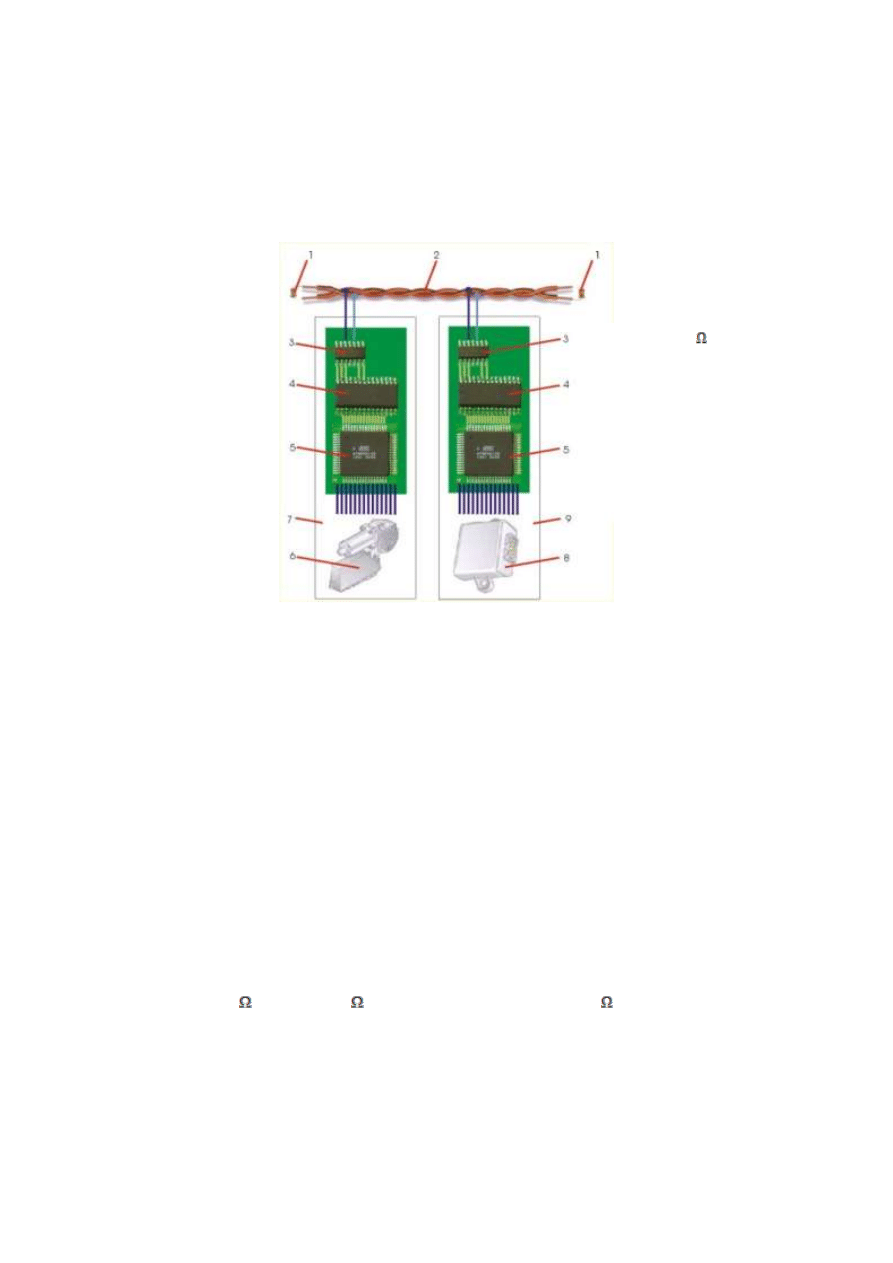
Rys. 2. Budowa węzła CAN
[1]
Kolejną ważną cechą magistrali CAN, którą warto zapamiętać jest to, że korzysta się tu z
asynchronicznego sposobu przesyłania danych – każda wcześniejsza stacja jest taktowana za
pomocą wcześniejszej
[6]
.
3. WARSTWA FIZYCZNA I WARSTWA ŁĄCZA DANYCH
W STANDARDZIE ISO 11898.
Ustala normy dla magistrali CAN – warstwę fizyczną i warstwę łącza danych.
Warstwa fizyczna
[5]
:
-dwuprzewodowa skrętka
-rezystory
-sygnał różnicowy
Magistrala od strony fizycznej to dwuprzewodowa skrętka. Jest ona stosowana gdyż taka budowa
zapobiega zakłóceniom elektromagnetycznym i jest to tanie rozwiązanie, w porównaniu do
wchodzących na rynek światłowodów. Na końcach skrętki mamy umieszczone rezystory, które
zapobiegają zjawisku odbicia fali elektromagnetycznej. Minimalna wartość tych rezystorów to:
minimalna:100 , nominalna:120 natomiast maksymalna to około 130 . W przypadku dużo
dłuższych przewodów (np. ponad 6km) magistrali, wartość ta może ulec zmianie.
1.Rezystor 120
2.Przewód typu skrętka
3.Nadajnik/odbiornik
4.Kontroler CAN
5.Mikrokontroler
6.Układ sterowalny 1
7.Węzeł CAN 1
8.Układ sterowalny 2
9.Węzeł CAN 2
Warstwa łącza danych
[5]
:
-adresy urządzeń
-sterowanie
-dane
-zabezpieczenia przed błędami
Szczególnie ważnym aspektem w tej warstwie jest identyfikator. Każda wiadomość ma swój
identyfikator – np. wartość mierzona wysyłana z czujnika temperatury ma swój szczególny
identyfikator, który określa znaczenie zawartych w wiadomości danych. Z identyfikatorem wiążą
się dwie wersje protokołu: 2.0A z 11 bitowym identyfikatorem oraz 2.0B z 29 bitowym
identyfikatorem. Identyfikator długości 11 bitów umożliwia rozróżnienie 2032 różnych typów
telegramów, a długości 29 bitów umożliwia rozróżnienie 536 870 912 telegramów
[6]
. Za pomocą
identyfikatora układ CAN rozpoznaje także priorytet wysyłanych danych – im mniejsza wartość
liczbowa tym większy priorytet. Należy zapamiętać, że identyfikator nie jest przypisany do
urządzenia, lecz do komunikatu.
4. JAK PRZESYŁANE SĄ DANE W PROTOKOLE CAN?
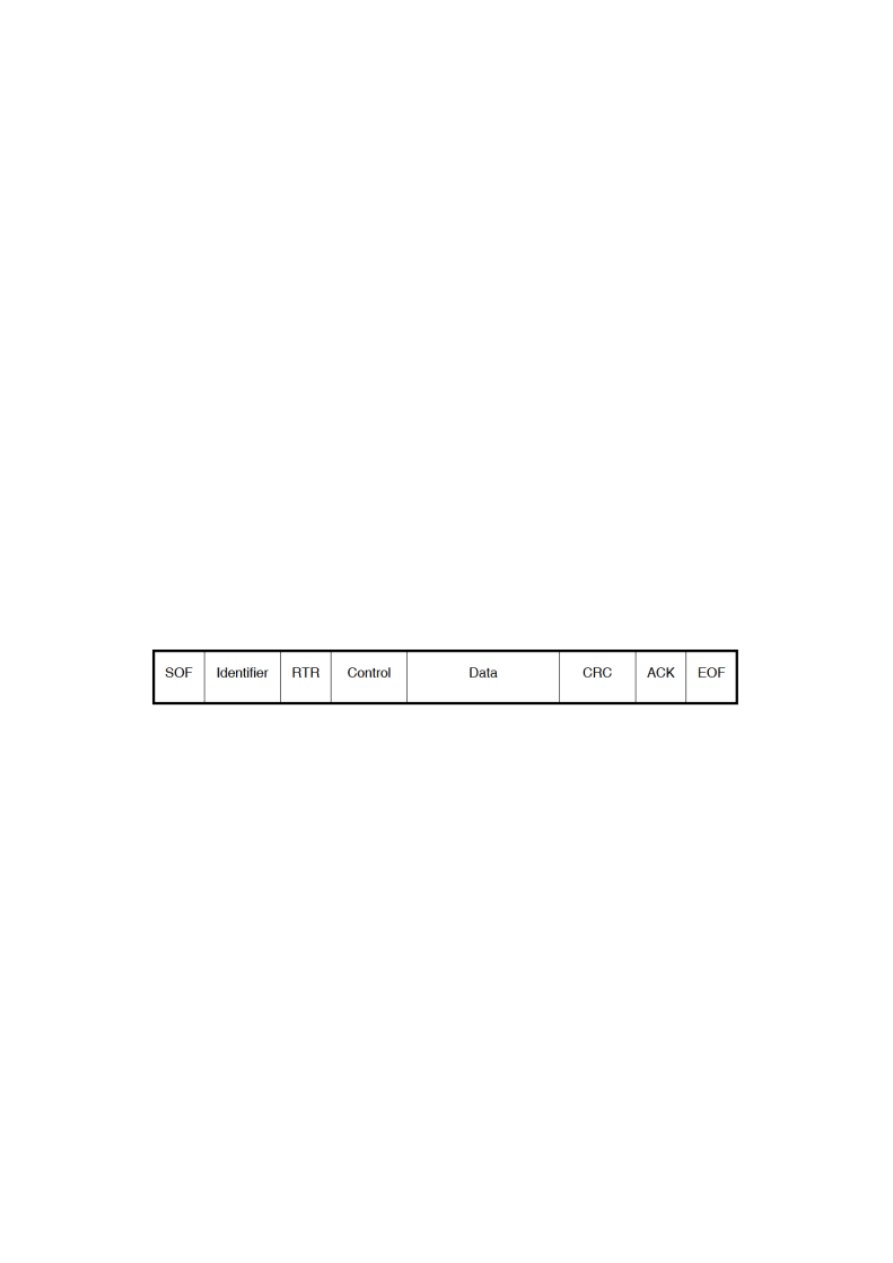
Dane wysyłane są w postaci pakietów nazywanych ramkami.
Rys.3. Ramka protokołu CAN
SOF – bit startowy – zawsze dominujący. Wszystkie stacje dołączone do magistrali synchronizują
swoje wewnętrzne stopnie odbiorcze z narastającym zboczem tego bitu.
Identifier + RTR – pole arbitrażu – zawiera identyfikator.
RTR – umożliwia stacji zaadresowanie i wysyłanie wiadomości do innej określonej stacji.
Control – zawiera informację o tym jak zbudowana jest ramka danych.
ACK – bit recesywny – może być przykry. Umożliwia to stacjom odbierającym wysyłanie
potwierdzenia odebrania poprawnej ramki danych.
EOF – składa się z 7 recesywnych bitów i kończy ramkę danych.
Ramka jest bardzo skomplikowana i może spędzać sen z powiek programistom. Jednak jest na to
rozwiązanie - specjalne moduły spełniają na poziomie hardware-u funkcje takie jak: obliczanie
CRC, dodawanie pozostałych pól, łączenie z magistralą, transmisje danych, wykrywanie i
usuwanie błędów
[6]
.
5. DLACZEGO STOSUJEMY MAGISTRALĘ CAN W MOTORYZACJI?
Przede wszystkim należy pamiętać, że magistrala CAN jak i sam protokół zapewnia szeroki zakres
prędkości przenoszenia danych. Dodatkowo odbywa się to w zasadzie bez występowania błędów.
Kolejną ważną zaletą w tym przypadku ekonomiczną jest łatwość utrzymania i niskie koszty
masowej produkcji a co za tym idzie powszechność i dostępność. Nie zapominajmy również o
prostocie konstrukcji – media magistrali, topologia, rozwiązania hardwarowe jak i mała zajętość
przestrzeni.
Na początku lat 80, kiedy to jeszcze w samochodach stosowano wyłącznie sam system
mikroprocesorowy, ilość kabli i ich waga była dość zawrotna. Dla przykładu. W przeciętnym
samochodzie długość kabli dochodziła do 3,2km co ważyło około 56kg. Kiedy na początku
wprowadzono magistralę CAN długość kabli wynosiła 2,2km czyli o 1km mniej. Waga również
się zredukowała i to aż o 17kg
[1]
.
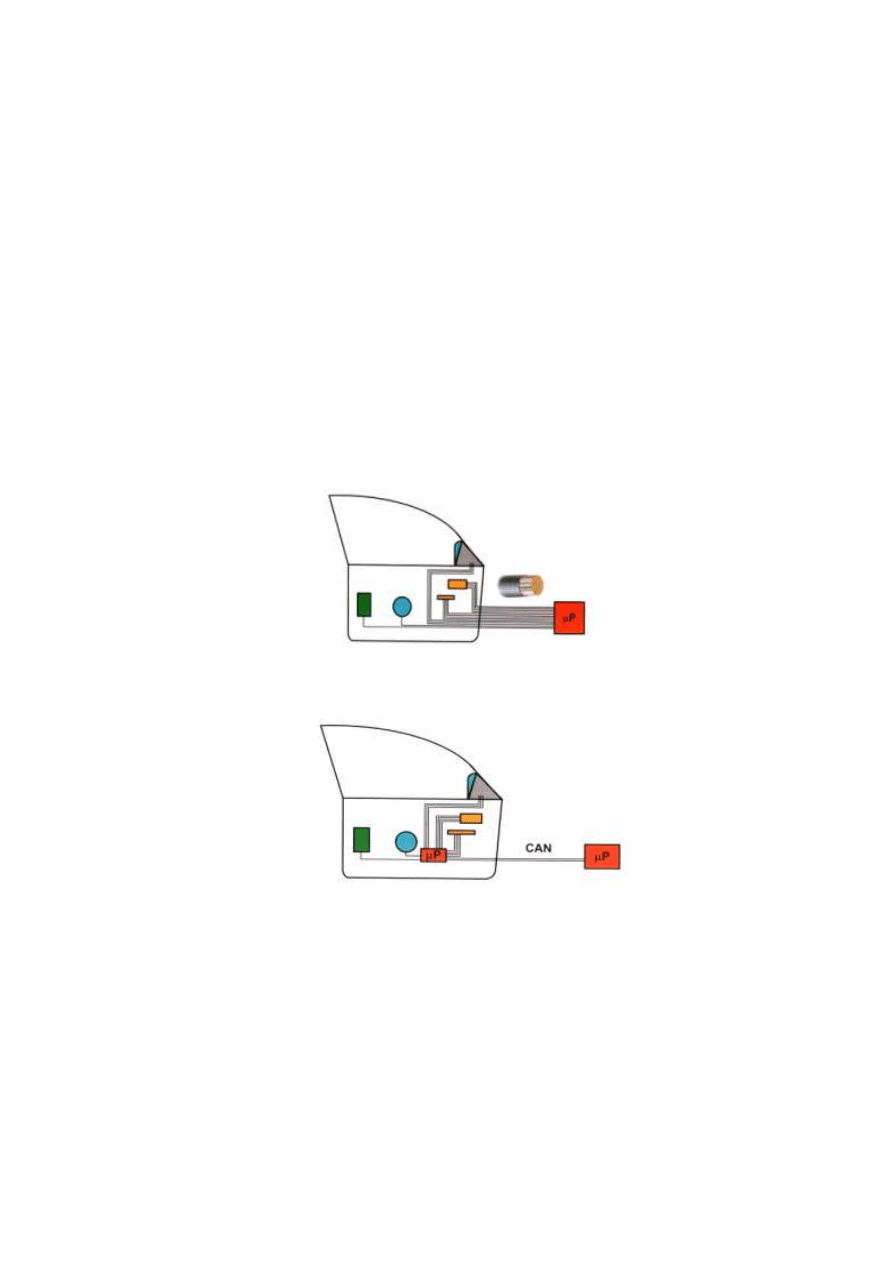
Rys.4. System oparty wyłącznie o mikroprocesor
[1]
Rys.5. System CAN w samochodzie
[1]
Dalszy rozwój techniki przyczynił się to tego, że na chwilę obecną, pojedyncza sieć CAN ma
długość 40m. Jest to długość optymalna przy której uzyskuje się prędkości do 1Mbit/s. Wcześniej
wspomniany standard ISO 11898 określa właśnie taką długość skrętki i szybkość przesyłu danych.
Gdzie można zastosować CAN? Praktycznie nie ma ograniczeń. Magistralę wykorzystuję się do
sterowania szybami, zamkami w drzwiach, alarmami jak i do systemów (np. ABS, ASR)
dbających o nasze bezpieczeństwo.
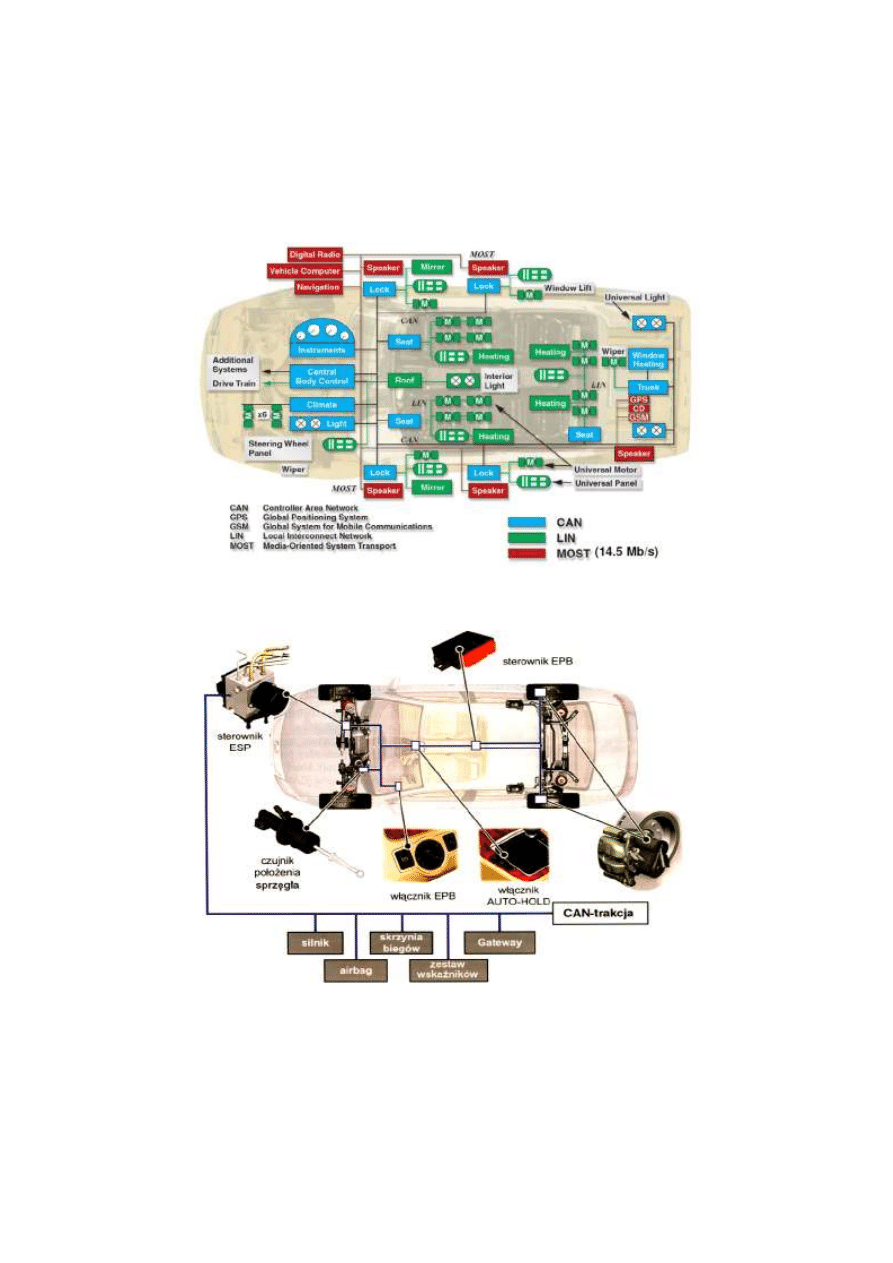
Rys.6. Przykład rozmieszczenia poszczególnych podzespołów magistrali CAN
[1]
Rys.7. Przykład rozmieszczenia poszczególnych podzespołów magistrali CAN
[1]

6. MAGISTRALA CAN W SAMOCHODACH FIRMY MERCEDES-BENZ.
Opiszę teraz zastosowanie magistrali CAN na przykładzie mercedesa. Jest to marka która już od
ponad 18 lat korzysta z systemu CAN i rozwinęła jego zastosowanie praktycznie w każdym
miejscu w samochodzie. W mercedesie można wyróżnić dwie główne sieci CAN. Pierwszy będzie
odpowiadał za takie rzeczy jak: zamki w drzwiach, alarmy, sterowanie fotelami, czy systemami
audio. Drugi natomiast będzie się zajmował systemami takimi jak: ABS (Anti-Lock Braking
System), ASR (Acceleration Slip Regulation), ESP ( Electronic Stability Program) czy skrzynia
biegów
[9]
.Coraz częściej używa się jednak jeszcze dodatkowej sieci, służącej do diagnostyki
całego samochodu. Kolejnym ciekawym zastosowaniem magistrali CAN jest połączenie jej z
modułem nawigacji GPS.
Podsumowując; w nowych modelach klasy E takich jak W211, W164, W169 można wyróżnić
[13]
:
CAN B: sieć odpowiadającą za ciało samochodu
CAN C: sieć odpowiadającą za silnik i nadwozie
CAN D: sieć diagnostyczną
Rys.8. Układ do diagnostyki
[17]
Na rys. 8. Widzimy układ do diagnostyki samochodu
[17]
. Elementy niebieskie są to zamknięte
gniazdka do których podpina się specjalne urządzenie (rys. 9.).Wykorzystuję się to głównie w
serwisach samochodowych w celu diagnostyki silnika i nie tylko. System jest jednak tak
opracowany by przeciętny użytkownik był zdolny do zrobienia tego samemu.
Rys.9. Urządzenie diagnostyczne
[11]
Trzeba jednak pamiętać, że w samochodach, które jak wiemy, są narażone na wiele czynników
zewnętrznych, będą zdarzać się wszelkiego rodzaju zakłócenia pracy, nie tylko układów
mechanicznych jak i układów elektrycznych. Najbardziej awaryjna jest elektronika, a jest to
związane z kruchością ścieżek i powstawania wszelkiego rodzaju zwarć. Nie ma systemów
idealnych. Nawet zbyt duża temperatura silnika, może negatywnie wpływać na układy
mikroprocesorowe sterujące pracą magistrali. Pamiętajmy zatem, że jeżeli chcemy jeździć
bezpiecznie, wszelkie niepokojące zachowania przyrządów należy sprawdzać natychmiast i
najlepiej zrobić to w autoryzowanym serwisie. Magistrala CAN ma wiele rodzajów zabezpieczeń,
zwłaszcza jeśli chodzi o bezbłędność przesyłu wiadomości, jednak jest to urządzenie i też może
zawieść.
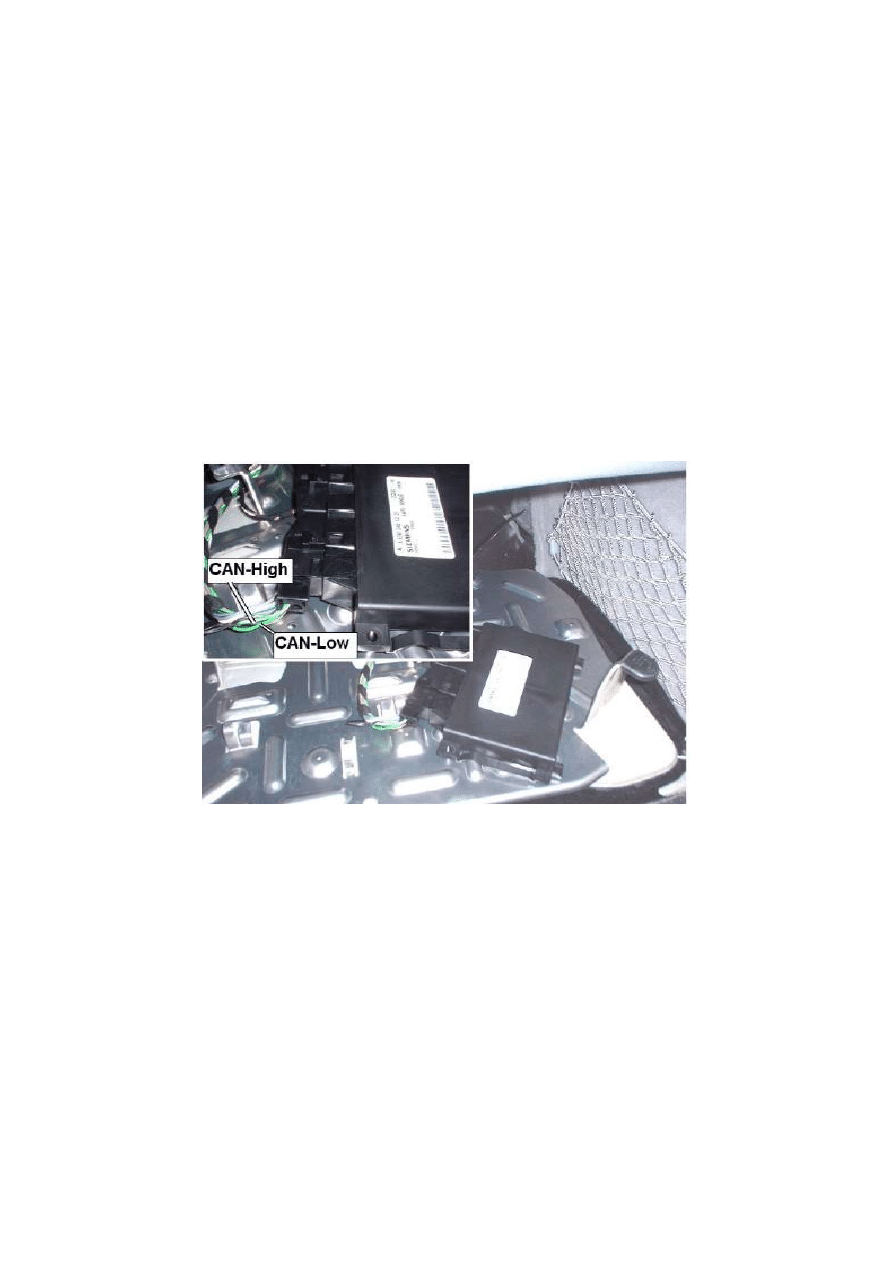
Rys.10. Główny moduł sterowania
[7]
Na rys. 10 widać główny komputer pokładowy. Na zbliżeniu widzimy skrętkę dwuprzewodową, o
której wcześniej tyle było powiedziane. Główne moduły mogą znajdować się w różnych miejscach
w zależności od marki samochodu. Oznaczenia kolorystyczne przewodów CAN HIGH i CAN
LOW również są inne w innych pojazdach, jak to widzimy na poniższych rysunkach.
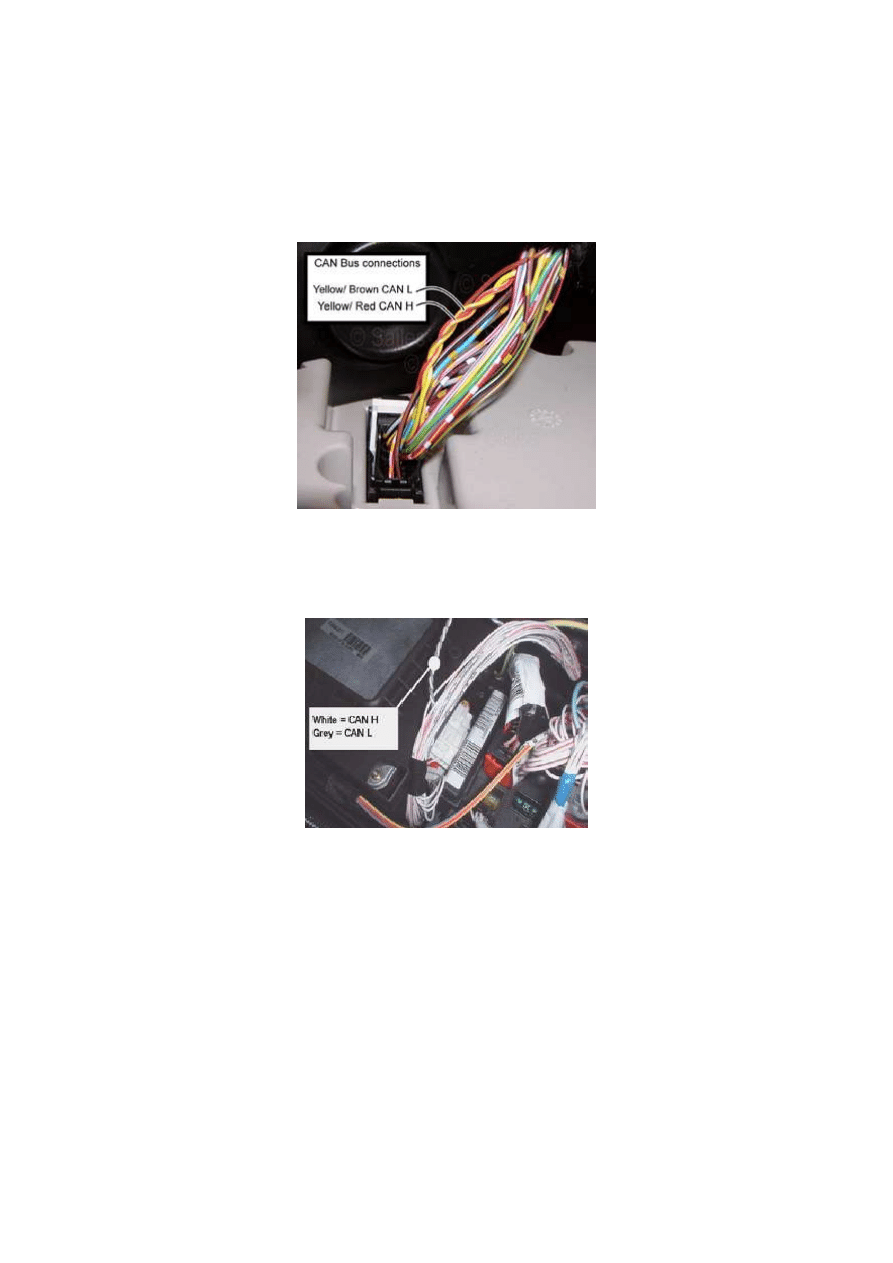
Rys.11. Skrętka przewodów CAN HIGH i CAN LOW magistrali CAN zastosowana w
samochodzie BMW 3 Series
[7]
Rys.12. Skrętka przewodów CAN HIGH i CAN LOW magistrali CAN zastosowana w
samochodzie Citroen C5
[7]

Rys.13. Skrętka przewodów CAN HIGH i CAN LOW magistrali CAN zastosowana w
samochodzie Honda Accord
[7]
Rys.14. Moduły znajdujące się na silniku ciężarowego samochodu marki Scania
[8]
Na rys. 14. widzimy silnik samochodu ciężarowego marki Scania. Czerwonymi strzałkami są
zaznaczone moduły odpowiedzialne za kontrolowanie parametrów takich jak: obroty, temperaturę
silnika, ilość paliwa wtryskiwanego do silnika w jednostce czasu. Wcześniej wspomniałem o
zakłóceniach jakie podczas jazdy samochodem mogą powstawać. Zauważmy jak czujniki na rys.
14. są zabudowane. Jest to solidna metalowa konstrukcja minimalizująca wpływ zakłóceń na
pracę silnika.
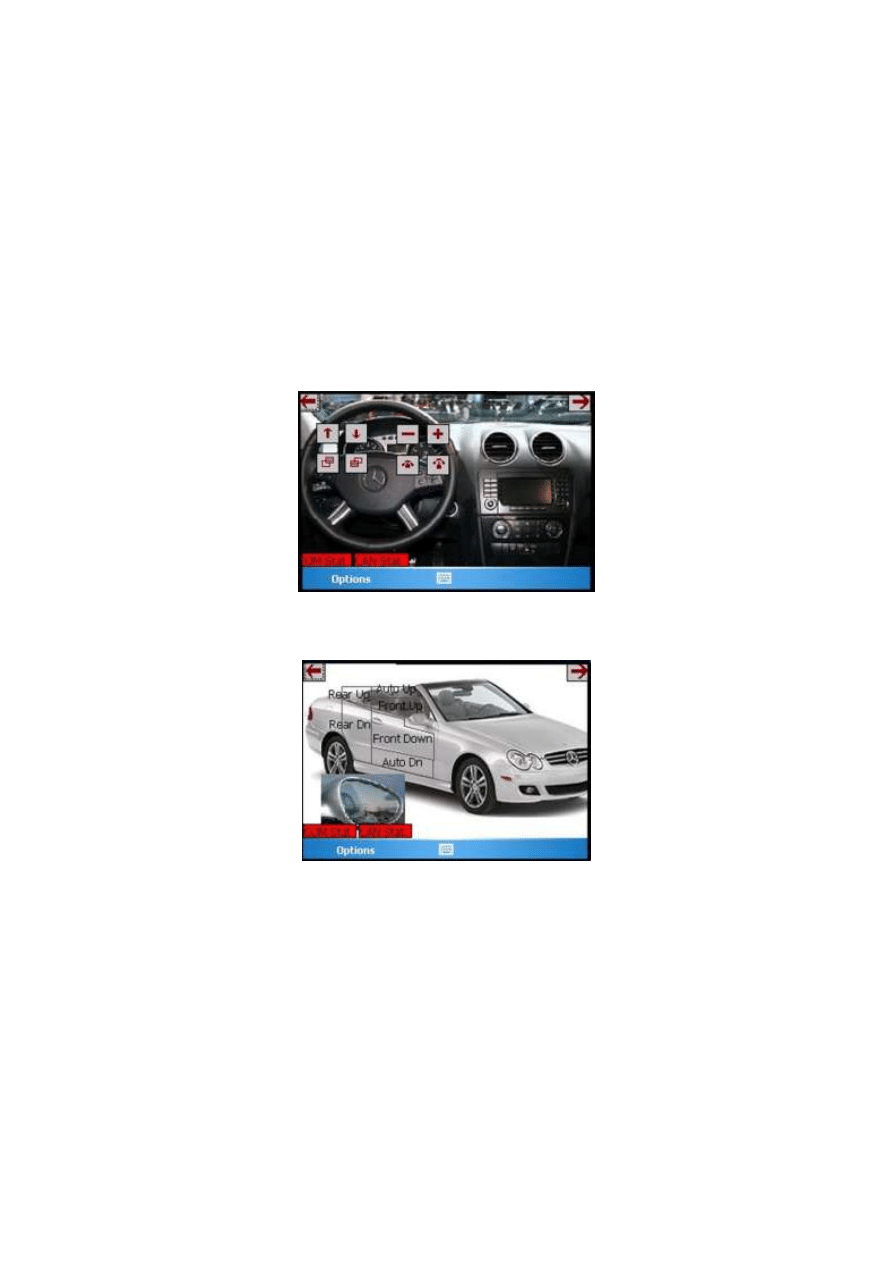
6.1. MOŻLIWOŚCI MAGISTRALI CAN.
Magistrala CAN umożliwia również sterowanie naszym wymarzonym samochodem
bezprzewodowo. Można do tego zastosować palmtopa, Windows Mobile i Bluetooth
[16]
.
Dzięki odpowiedniej wiedzy i wysiłkowi można za pośrednictwem odpowiedniego
oprogramowania sterować podzespołami naszego mercedesa takimi jak drzwi, okna, lusterka,
ustawienie kierownicy.
Rys. 15. Zrzut z ekranu palmtopa, na którym widzimy możliwość sterowania
położeniem kierownicy
[16]
Rys. 16. Zrzut z ekranu palmtopa, na którym widzimy możliwość sterowania
ciałem samochodu
[16]
6.2. MAGISTRALA CAN W PRAKTYCE.
Dużo było powiedziane o wszelkiego rodzaju zastosowaniach jak i możliwościach magistrali
CAN. Jednak jak to wygląda w praktyce? Po krótce przedstwię jak przyłączyć do samochodu
przyczepę
[15]
i jak podpiąć światła tej przyczepy, by były one zsynchronizowane ze światłami
samochodu.
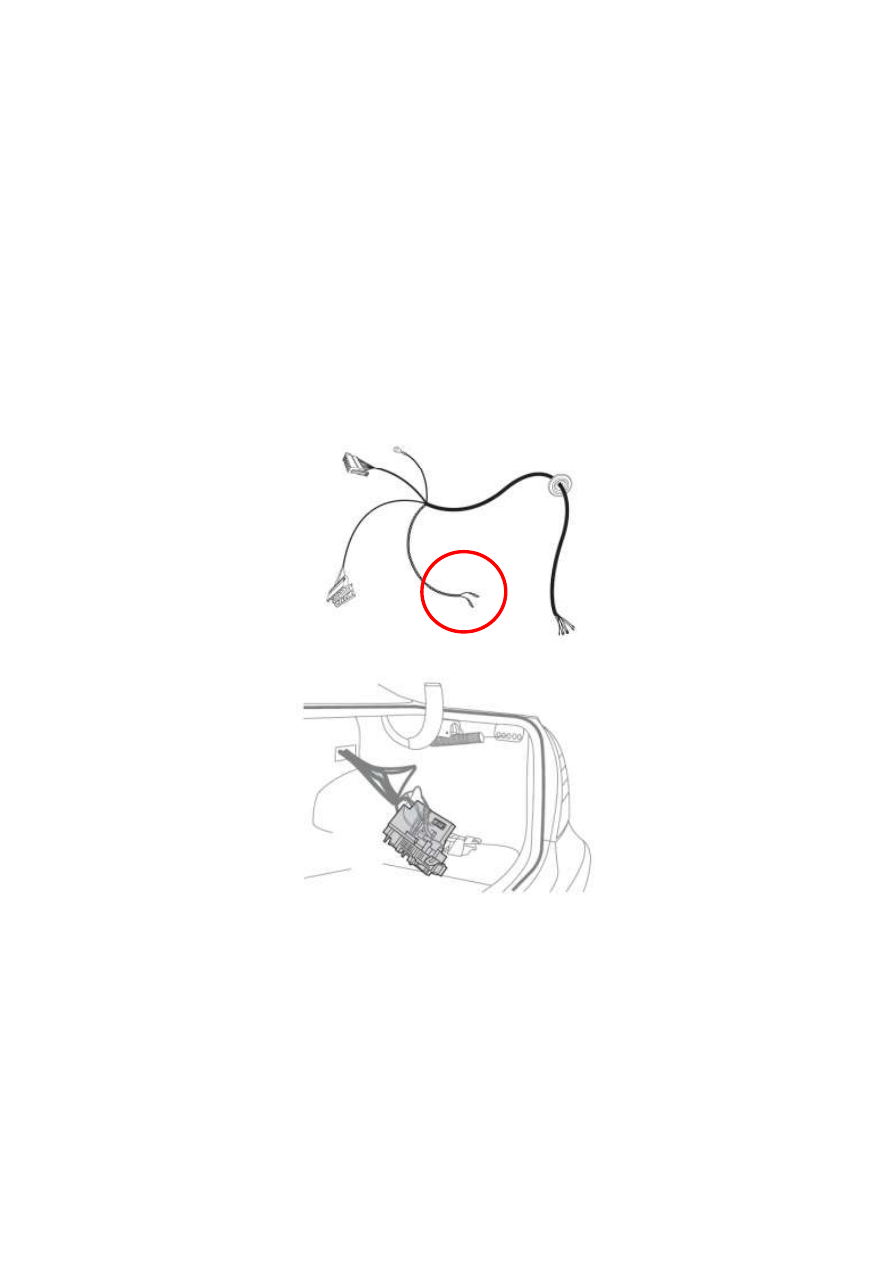
Aby podłączyć przyczepę i światła potrzebny jest specjalny kabel. Na rys. 17 widzimy dwu
przewodową skrętkę służącą do podłączenia do systemu CAN zaznaczoną czerwonym kółkiem.
Kabel posiada jeszcze dodatkowe gniazda służące do podłączenia wszystkiego do głównego
komputera (rys. 18.).
Rys. 17. Kabel służący do podłączenia oświetlenia przyczepy
[15]
Rys. 18. Główny moduł sterujący
[15]
Rys. 17.
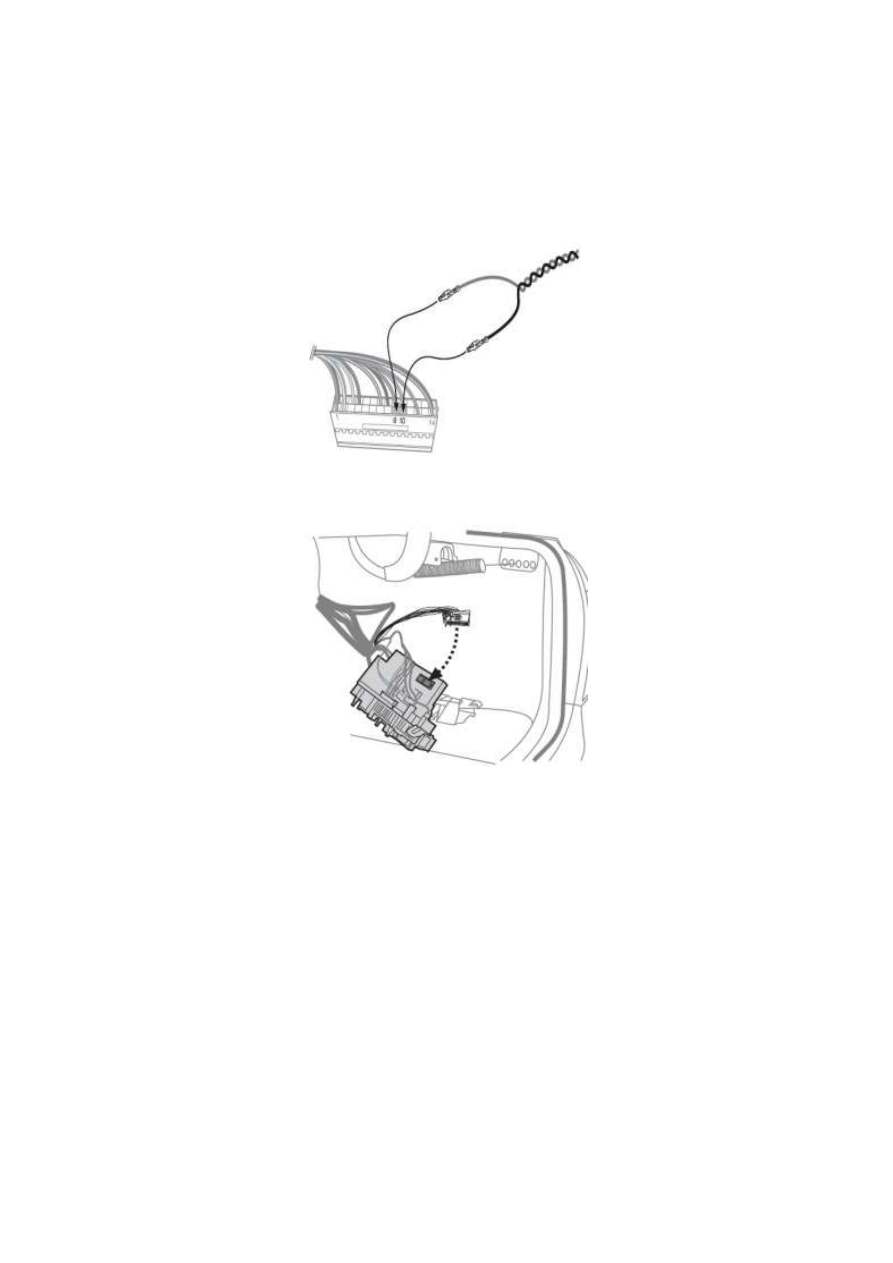
Rys. 19. Podłączenie skrętki przewodów CAN HIGH i CAN LOW
do głównej wtyczki
[15]
Rys. 20. Wpięcie głównej wtyczki do modułu sterującego
[15]
Na rys. 19. widzimy jak wpinamy do gniazda nasze przewody CAN HIGH i CAN LOW. Po
wpięciu ich do wtyczki, całość wpinamy do głównego komputera (rys. 20.).
Mam nadzieję, że ten artykuł przybliżył fenomen magistrali CAN. Zapraszam wszystkich do
szerokiej literatury i Internetu na temat tego systemu. Dziedziny, które wymieniłem w danym
artykule są bardzo obszerne i praktycznie każda wymaga wnikliwego przestudiowania, by ją
dobrze zrozumieć.

7. BIBLIOGRAFIA.
[1] Controller Area Network: dr inż. Jędrzej Mączak z Wydziału Samochodów i Maszyn
Roboczych, Politechnika Warszawska
[2] Mercedes CAN Bus & Diagnostics Manual 2009
[3] REAL-TIME SYSTEMS II Real-Time Networking Controller Area Network: Prof. J.-D.
Decotignie
[4] Networks Controller Area Network: Prof. Dr Thomas Strang, Dipl.-Inform. Matthias
Röckl
[5] Elektronika dla wszystkich: Elektronika w motoryzacji: Jarosław Barański, czerwiec
2000
[6] Elektronika praktyczna 4/2000
[7] Can bus location – firmy Racelogic
[8] Vehicle Applications of Controller Area Network: Karl Henrik Johansson, Martin
Torngren
[9] http://www.asashop.org/autoinc/may2007/techtips.htm
[10] http://free.of.pl/c/can1/Opis.htm
[11] http://www.mercedesmanuals.com
[12] http://www.omitec.com/en/support/canbus/
[13] http://www.auto-diagnostics.info/mercedes_can_bus
[14] http://www.peak-system.com/
[15] http://www.bertelshofer.com/media/products/7ME035_Einbauanleitung.pdf
[16] http://www.honeysw.com/canproject.php
[17] http://www.import-
car.com/Article/47364/mercedes_can_diagnostics__uncovering_faults_speeds_the_repair
_process.aspx
Wyszukiwarka
Podobne podstrony:
Magistrala CAN i zamrożone ramki, Diagnostyka dokumety
CAN (wszystko na temat magistrali CAN)
CAN (wszystko na temat magistrali CAN), MATERIALY DODATKOWE
Magistrala CAN
Ekploatacyjne właściwości magistrali CAN w pojazdach samochodowych Politechnika Warszawska
Magistrala CAN i zamrożone ramki, Diagnostyka dokumety
Sieć magistral CAN Infotainment
Sieć magistral CAN układu napędowego
Magistrala danych CAN wtyczki rozłączające
Auditor SZJ w motoryzacji
MOTORYKA DUŻA i mała
2 NIEDZIELA ADWENTU A
31 NIEDZIELA ZWYKŁA B
7 tydzień Wielkanocy, VII Niedziela Wielkanocna A
5 tydzień, V Niedziela Wielkiego postu C
Charakterystyka rozwoju motorycznego
11 NIEDZIELA ZWYKŁA B
więcej podobnych podstron