8.6 Linearization of Nonlinear Systems
In this section we show how to perform linearization of systems described by
nonlinear differential equations. The procedure introduced is based on the Taylor
series expansion and on knowledge of nominal system trajectories and nominal
system inputs.
We will start with a simple scalar first-order nonlinear dynamic system
Assume that under usual working circumstances this system operates along the
trajectory
while it is driven by the system input
. We call
and
, respectively, the nominal system trajectory and the nominal system input.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–83
On the nominal trajectory the following differential equation is satisfied
Assume that the motion of the nonlinear system is in the neighborhood of the
nominal system trajectory, that is
where
represents a small quantity. It is natural to assume that the system
motion in close proximity to the nominal trajectory will be sustained by a system
input which is obtained by adding a small quantity to the nominal system input
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–84
For the system motion in close proximity to the nominal trajectory, we have
Since
and
are small quantities, the right-hand side can be expanded
into a Taylor series about the nominal system trajectory and input, which produces
Canceling
higher-order
terms
(which
contain
very
small
quantities
), the linear differential equation is obtained
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–85
The partial derivatives in the linearization procedure are evaluated at the nominal
points. Introducing the notation
the linearized system can be represented as
In general, the obtained linear system is time varying. Since in this course we
study only time invariant systems, we will consider only those examples for which
the linearization procedure produces time invariant systems. It remains to find the
initial condition for the linearized system, which can be obtained from
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–86
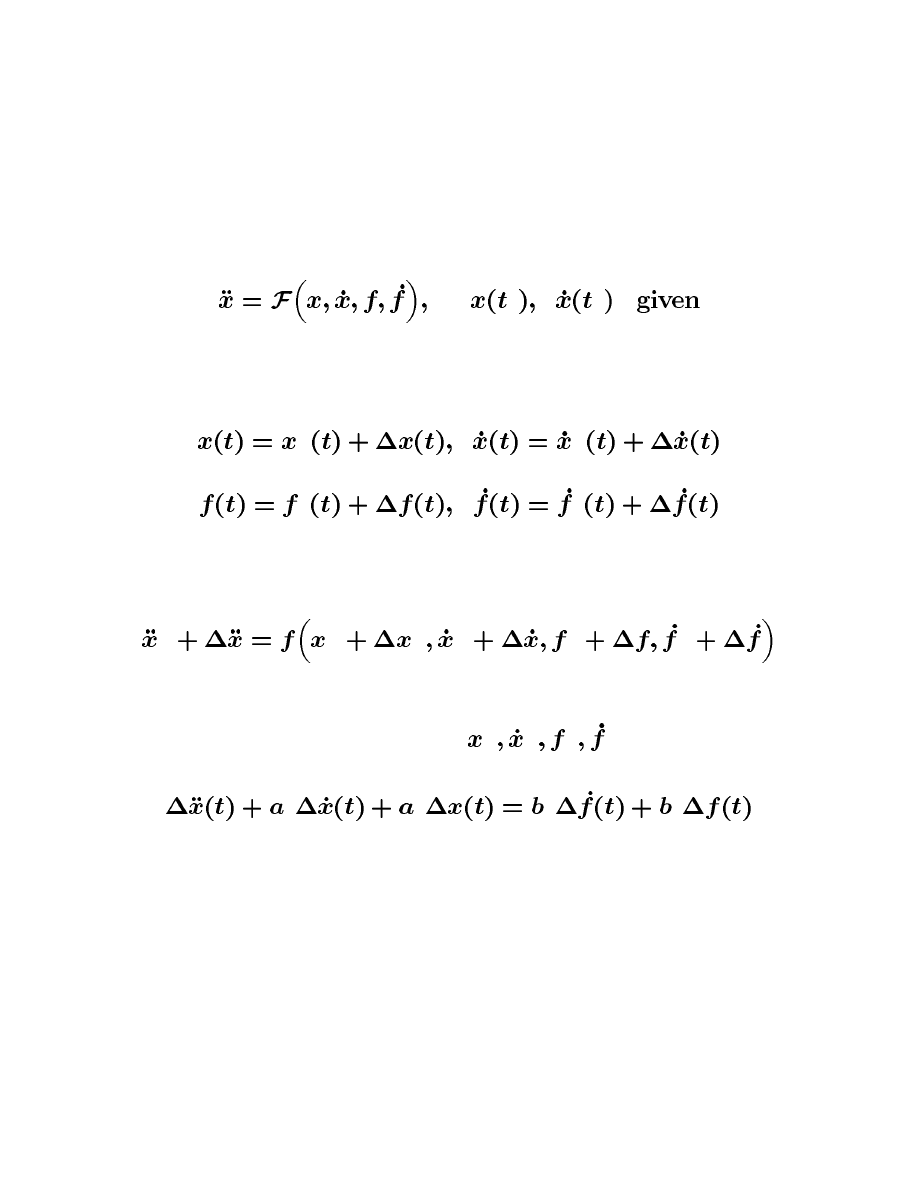
Similarly, we can linearize the second-order nonlinear dynamic system
by assuming that
and expanding
into a Taylor series about nominal points
, which leads to
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–87
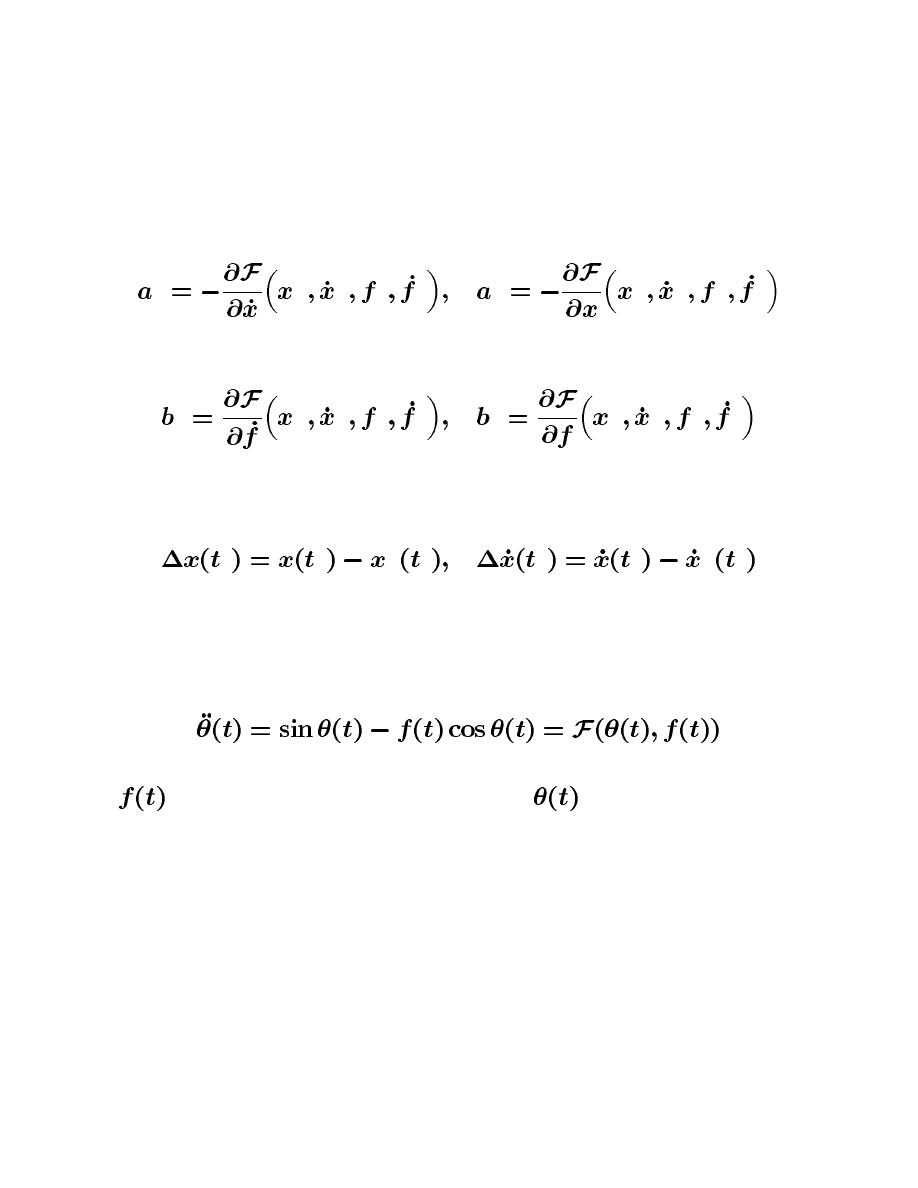
where the corresponding coefficients are evaluated at the nominal points as
The initial conditions for the second-order linearized system are obtained from
Example 8.15: The mathematical model of a stick-balancing problem is
where
is the horizontal force of a finger and
represents the stick’s angular
displacement from the vertical.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–88
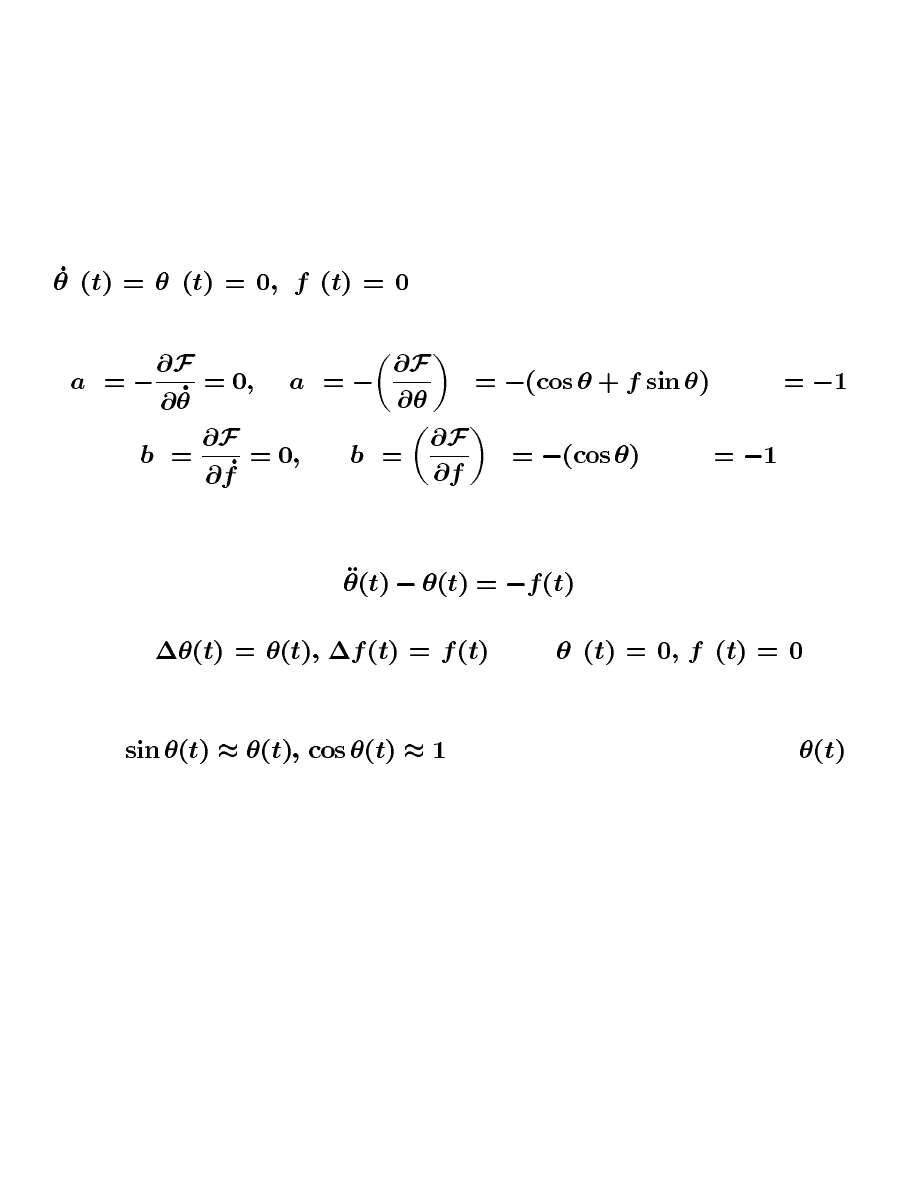
This second-order dynamic system is linearized at the nominal points
, producing
!"
The linearized equation is given by
Note that
since
. It is
important to point out that the same linearized model could have been obtained by
setting
, which is valid for small values of
.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–89
We can extend the presented linearization procedure to an
-order nonlinear
dynamic system with one input and one output in a straightforward way. However,
for multi-input multi-output systems this procedure becomes cumbersome. Using
the state space model, the linearization procedure for the multi-input multi-output
case is simplified.
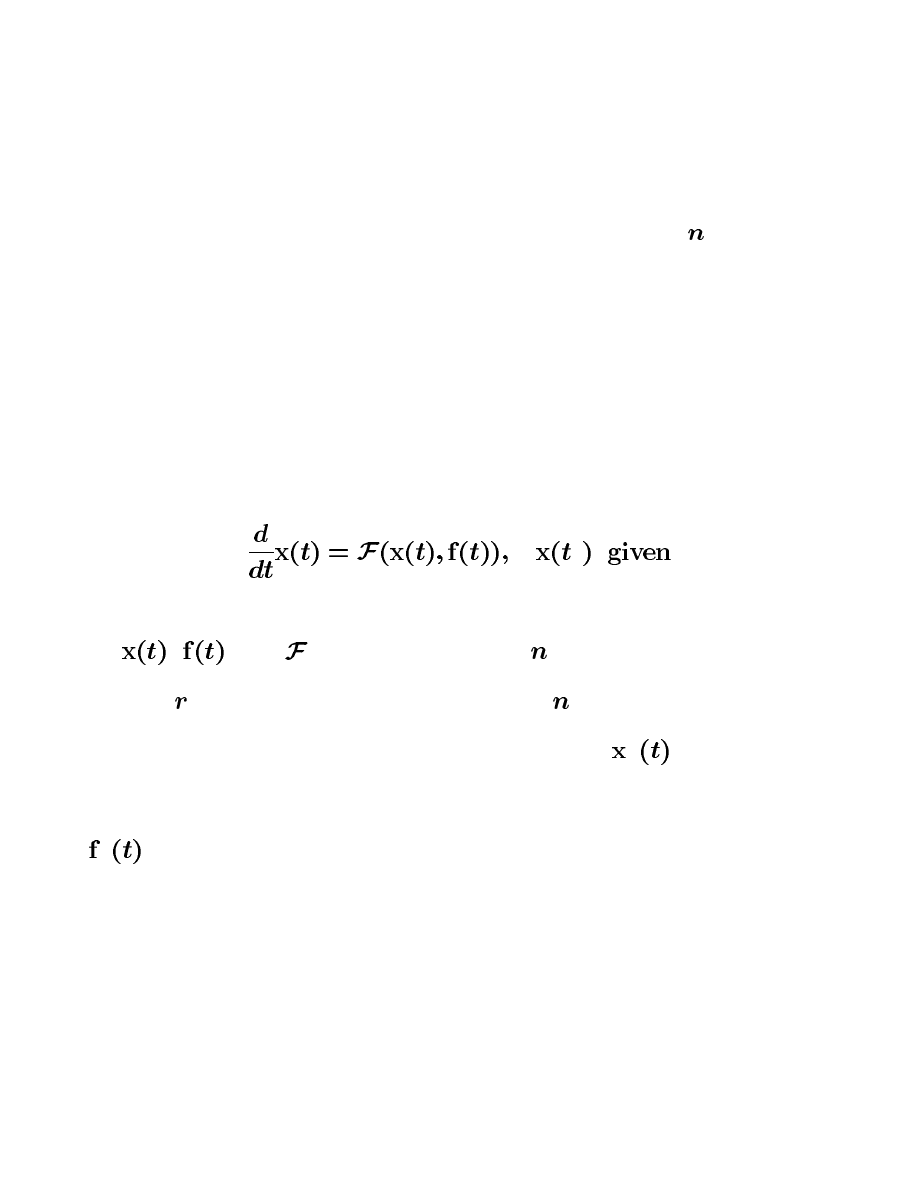
Consider now the general nonlinear dynamic control system in matrix form
#
where
,
, and
are, respectively, the
-dimensional system state space
vector, the
-dimensional input vector, and the
-dimensional vector function.
Assume that the nominal (operating) system trajectory
$
is known and that
the nominal system input that keeps the system on the nominal trajectory is given
by
$
.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–90
Using the same logic as for the scalar case, we can assume that the actual
system dynamics in the immediate proximity of the system nominal trajectories can
be approximated by the first terms of the Taylor series. That is, starting with
%
%
and
%
%
%
we expand the right-hand side into the Taylor series as follows
%
%
%
%
%
&"')(+*,-
.
(
*/,-
&'0(1*,-
.
(
*,-
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–91
Higher-order terms contain at least quadratic quantities of
and
. Since
and
are small their squares are even smaller, and hence the high-order terms
can be neglected. Neglecting higher-order terms, an approximation is obtained
2"3541678
9
4
678
2354:6;78
9
4
678
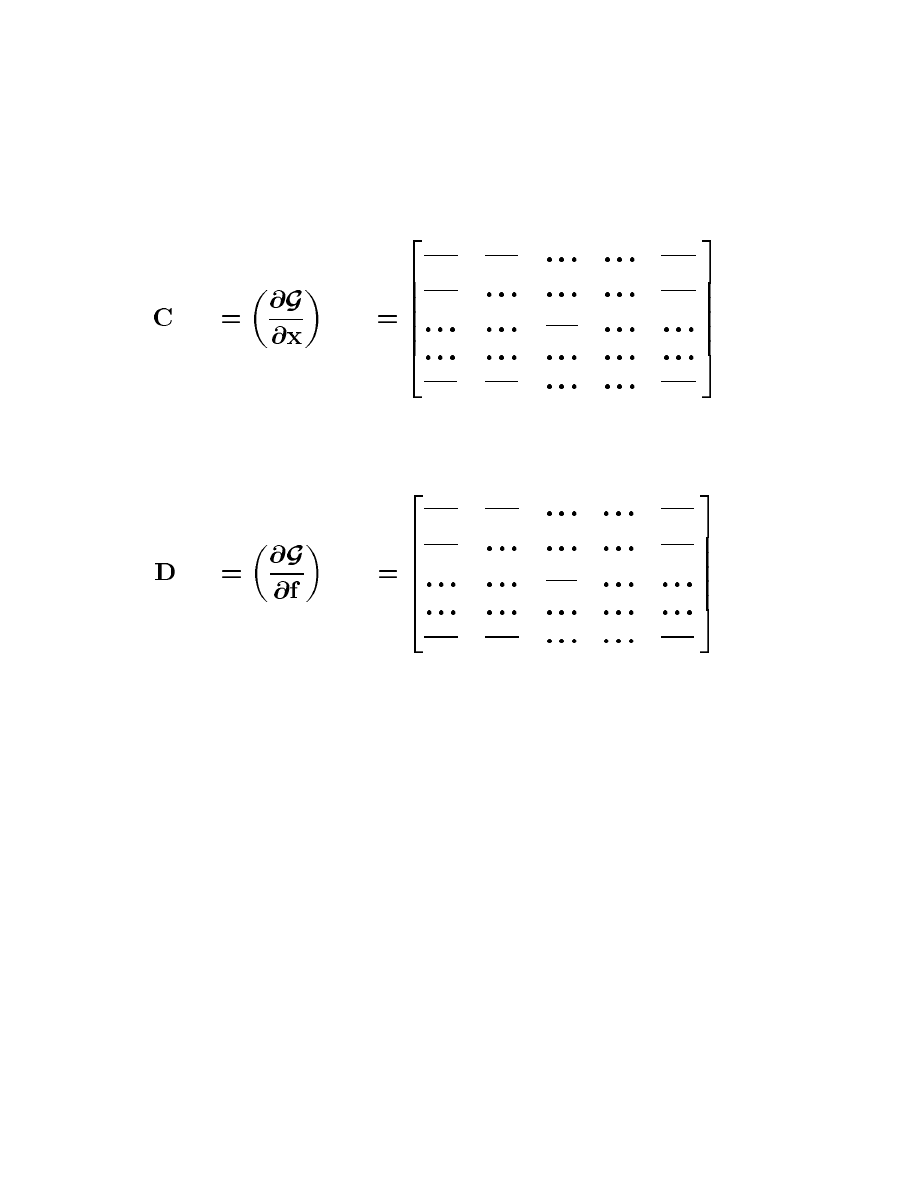
The partial derivatives represent the Jacobian matrices given by
2"3546!78
9
4
6;78
<>=?<
@BADC
@FE
C
@BADC
@FEBG
@HAIC
@FE
4
@BA
G
@FE
C
@HA
G
@FE
4
@HAKJ
@FEML
@HA
4
@FE
C
@HA
4
@FEBG
@BA
4
@FE
4
23
4
678
9
4+678
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–92
NO5PQRS
T
PQRS
U>V?W
XFY[Z
X]\
Z
XHYIZ
X^\`_
XHYIZ
X^\ba
XHY
_
X^\`Z
XHY
_
X^\
a
XHYKc
Xd\fe
XHY
P
X^\
Z
XHY
P
X^\
_
XHY
P
X^\
a
N
O
P
Q!RS
T
P
Q!RS
Note that the Jacobian matrices have to be evaluated at the nominal points, that
is, at
U
and
U
. With this notation, the linearized system has the form
g
g
U
g
The output of a nonlinear system satisfies a nonlinear algebraic equation, that is
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–93
This equation can also be linearized by expanding its right-hand side into a
Taylor series about nominal points
h
and
h
. This leads to
h
h
h
i"j5kl!mn
o
k
l!mn
i"j5k+l;mn
o
k
l!mn
Note that
h
cancels term
h
h
.
By neglecting higher-order terms, the
linearized part of the output equation is given by
where the Jacobian matrices
and
satisfy
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–94
prqts
u"v)w:x;yz
{
wxyz
|F}^~
|
~
|}d~
|FB
|}d~
|
w
|F}
|
~
|}
|
w
|F}B
|F:
|}
|FF~
|}:
|F
|}:
|
w
u
v
w
x;yz
{
w
x;yz
prq
u"v
w
xyz
{
w
xyz
|}
~
|^
~
|F}
~
|d
|F}
~
|d
|}F
|^~
|F}
|d
|}
|^
|}
|^
~
|F}
|d
|F}
|^
uv
w
xyz
{
w
xyz
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–95
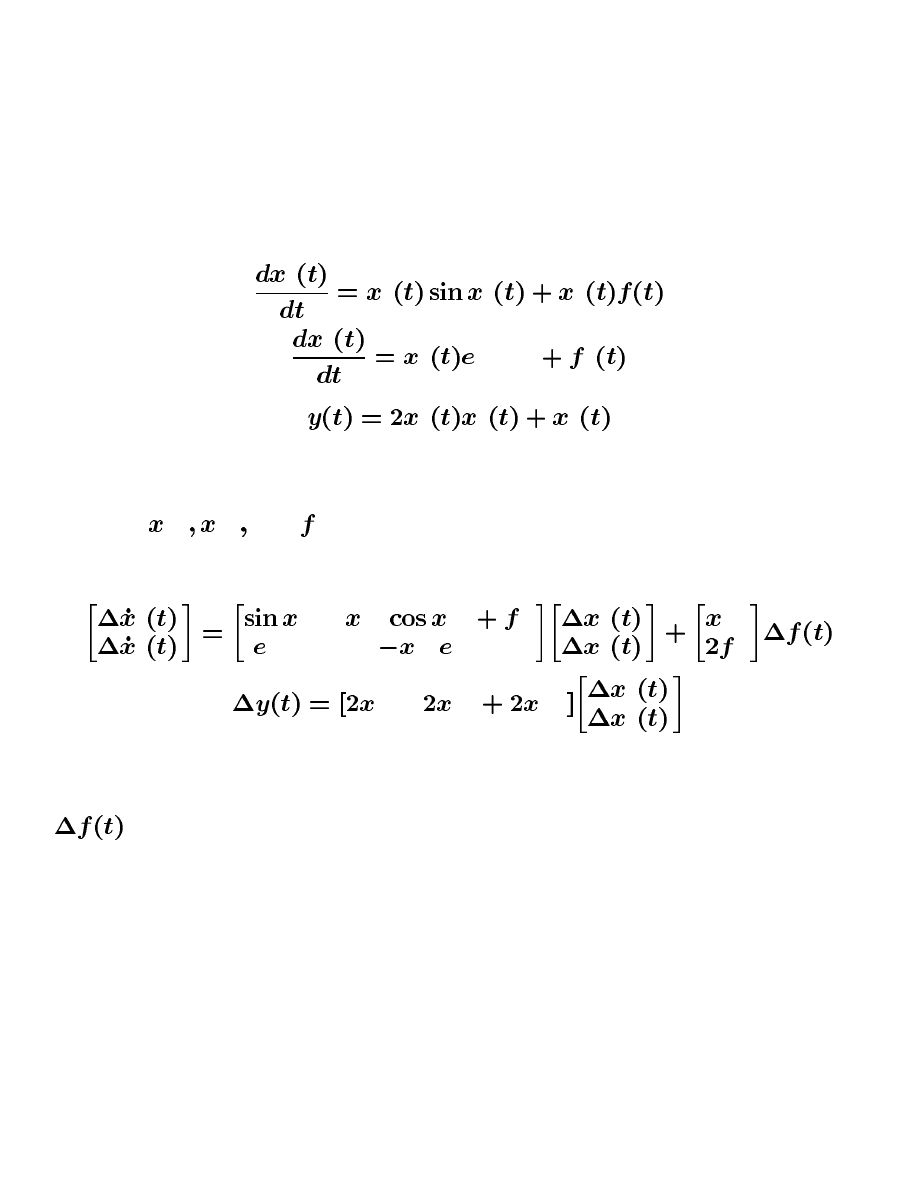
Example 8.16: Let a nonlinear system be represented by
KBb5
Assume that the values for the system nominal trajectories and input are known and
given by
f
and
. The linearized state space equation of this nonlinear
system is obtained as
f
b
[
f
[
f
Having obtained the solution of this linearized system under the given system input
, the corresponding approximation of the nonlinear system trajectories is
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–96
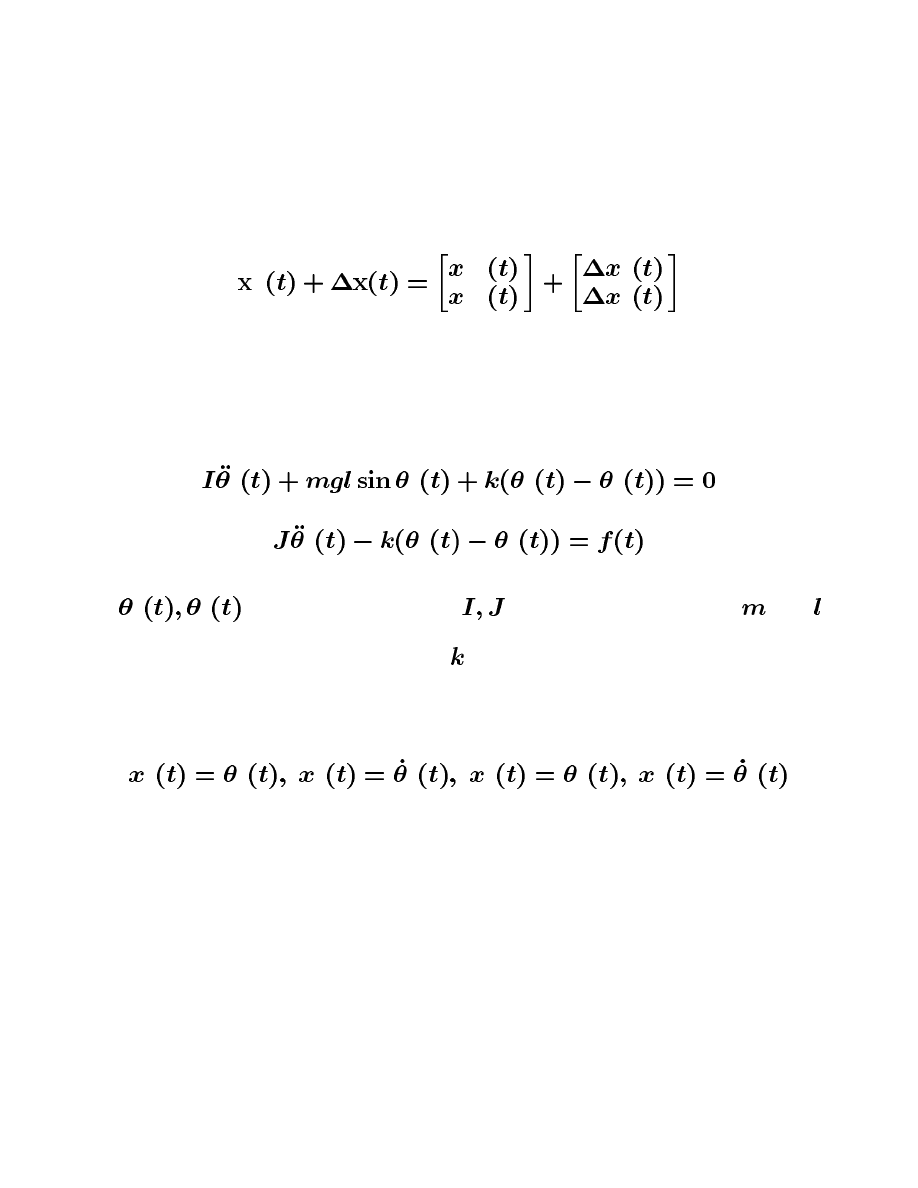
Example 8.17: Consider the mathematical model of a single-link robotic ma-
nipulator with a flexible joint given by
where
are angular positions,
are moments of inertia,
and are,
respectively, link mass and length, and
is the link spring constant. Introducing
the change of variables as
the manipulator’s state space nonlinear model is given by
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–97
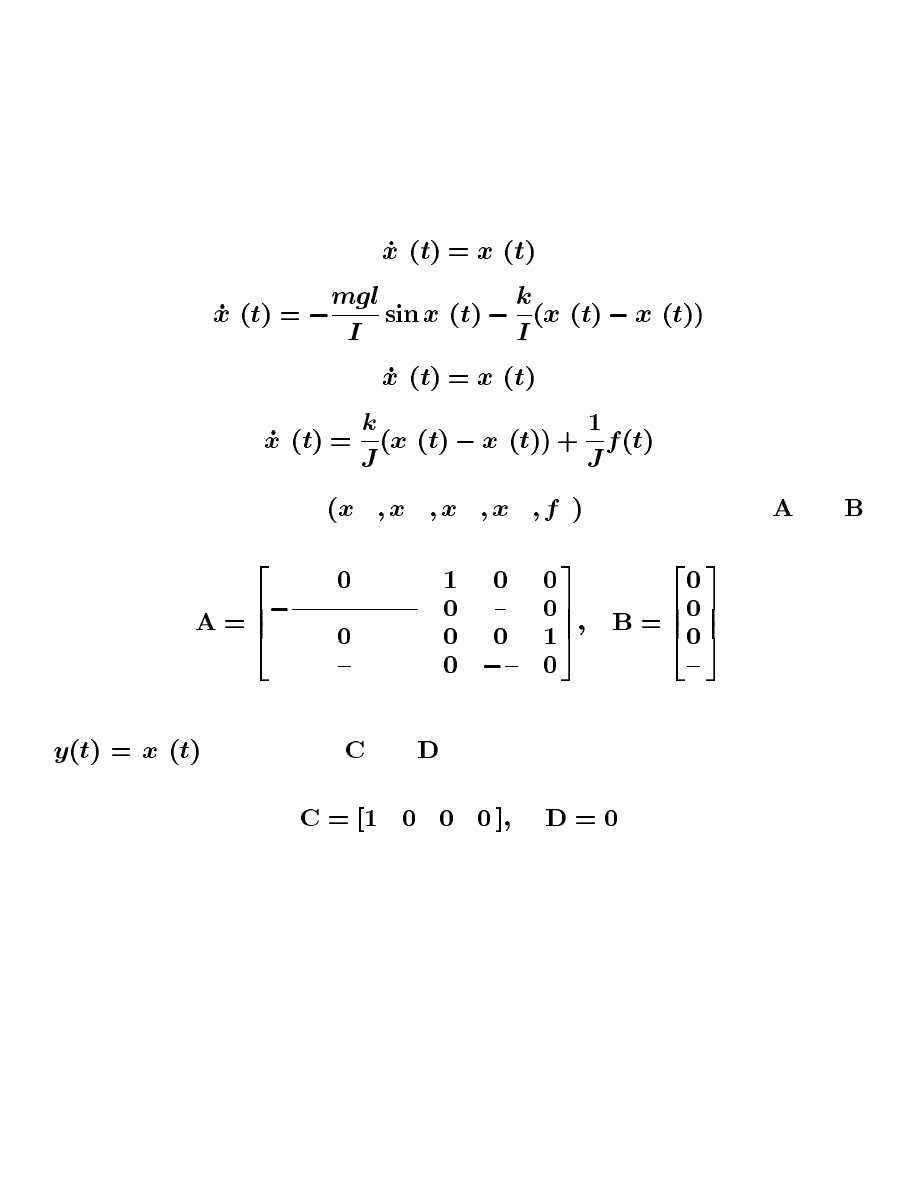
Take the nominal points as
f
b
`
`
, then the matrices
and
are
¡:¢¤£¦¥+§©¨«ª`¬+F®°¯
±
¡
±
¡
²
¡
²
²
Assuming that the output variable is equal to the link’s angular position, that is
, the matrices
and
are given by
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic
8–98
Wyszukiwarka
Podobne podstrony:
Linearization of nonlinear differential equation by Taylor series expansion
Mathematica package for anal and ctl of chaos in nonlin systems [jnl article] (1998) WW
Statistical seismic response analysis and reliability design of nonlinear structure system
Impact of resuscitation system errors on survival from in hospital cardiac arrest
The?vantages of American?ucational System
88 1249 1261 Examination of the Real Prestressing Conditions of Tooling Systems
PBO-G-01-F01 Status of the system, Akademia Morska, Chipolbrok
Data Modeling Object Oriented Data Model Encyclopaedia of Information Systems, Academic Press Vaz
Analysis of?mocracy The?ults of the System
Bertalanffy The History and Status of General Systems Theory
Guide to the installation of PV systems 2nd Edition
Impact of resuscitation system errors on survival from in-hospital cardiac arrest, MEDYCYNA, RATOWNI
Time Series Models For Reliability Evaluation Of Power Systems Including Wind Energy
AMENDMENTS TO THE REVISED GUIDELINES FOR APPROVAL OF SPRINKLER SYSTEM
Dynkin E B Superdiffusions and Positive Solutions of Nonlinear PDEs (web draft,2005)(108s) MCde
Lunardi A Linear and nonlinear diffusion problems (draft, 2004)(O)(104s) MCde
Fraessdorf Quantization of Singular Systems in Canonical Formalism
więcej podobnych podstron