
1
PLANOWANIE
PLANOWANIE
PRZYDZIAŁU
PRZYDZIAŁU
PROCESORA
PROCESORA
Jerzy Peja
Politechnika Szczeci ska
Wydział Informatyki
ul. ołnierska 49, 71-210 Szczecin
2
Agenda
Podstawowe poj cia
Komponenty j dra zwi zane z szeregowaniem
Ogólna koncepcja planowania
Kryteria oceny algorytmów planowania
Algorytmy planowania
Planowanie wieloprocesorowe
Planowanie w czasie rzeczywistym
Ocena algorytmów
2
3
Deklaracja
Przy opracowywaniu niniejszego wykładu korzystano
z ogólnodost pnych slajdów do ksi ki
Podstawy
systemów operacyjnych (A. Silberschatz, P.B. Galvin,
G. Gagne) oraz do wykładów
Systemy operacyjne
(Jerzy Brzezi ski i Dariusz Wawrzyniak),
udost pnionych w ramach
Uczelni On-line
4
Podstawowe poj cia
Wieloprogramowo umo liwia zwi kszenie wykorzystania
procesora CPU.
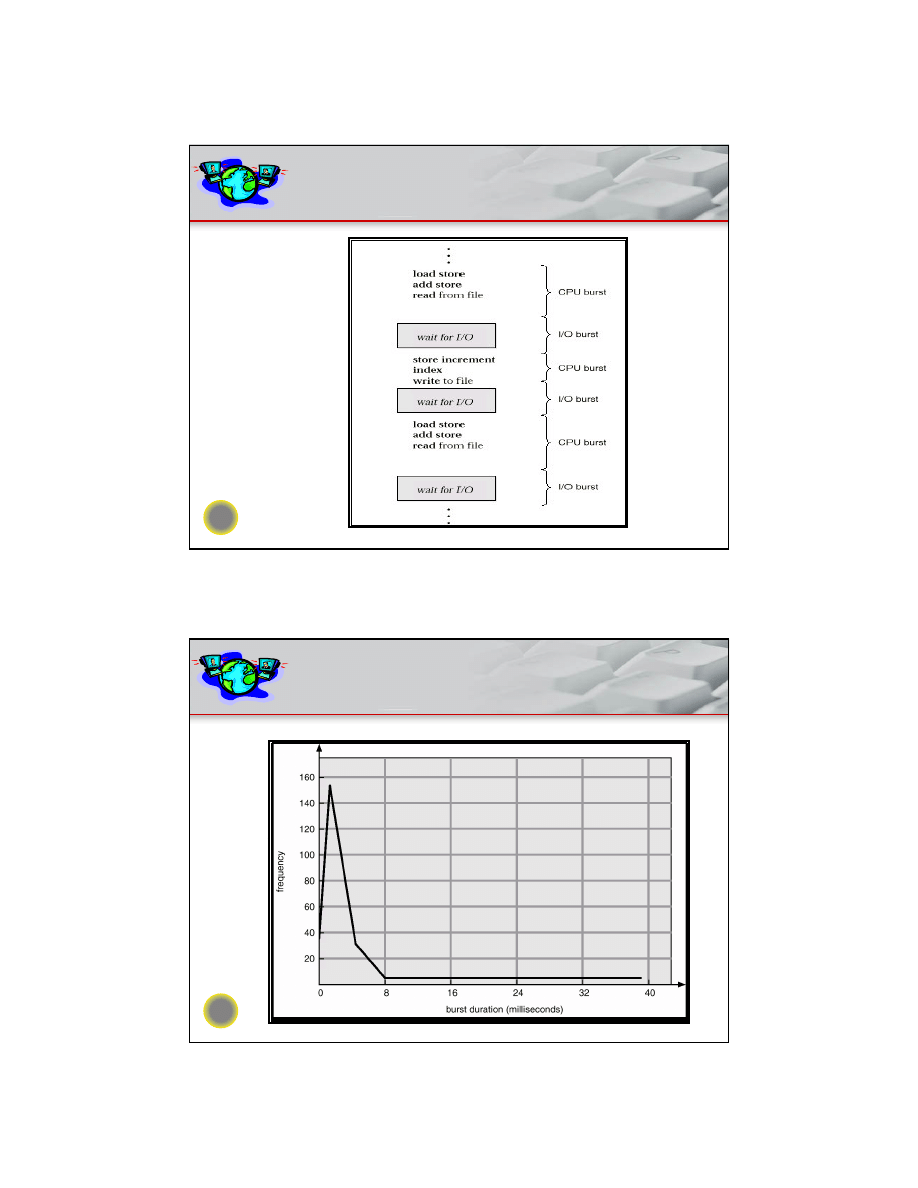
Cykl faz (ang. burst) procesora (CPU) – urz dze I/O:
wykonywanie procesu składa si z cyklu działania procesora
i oczekiwania na urz dzenie I/O.
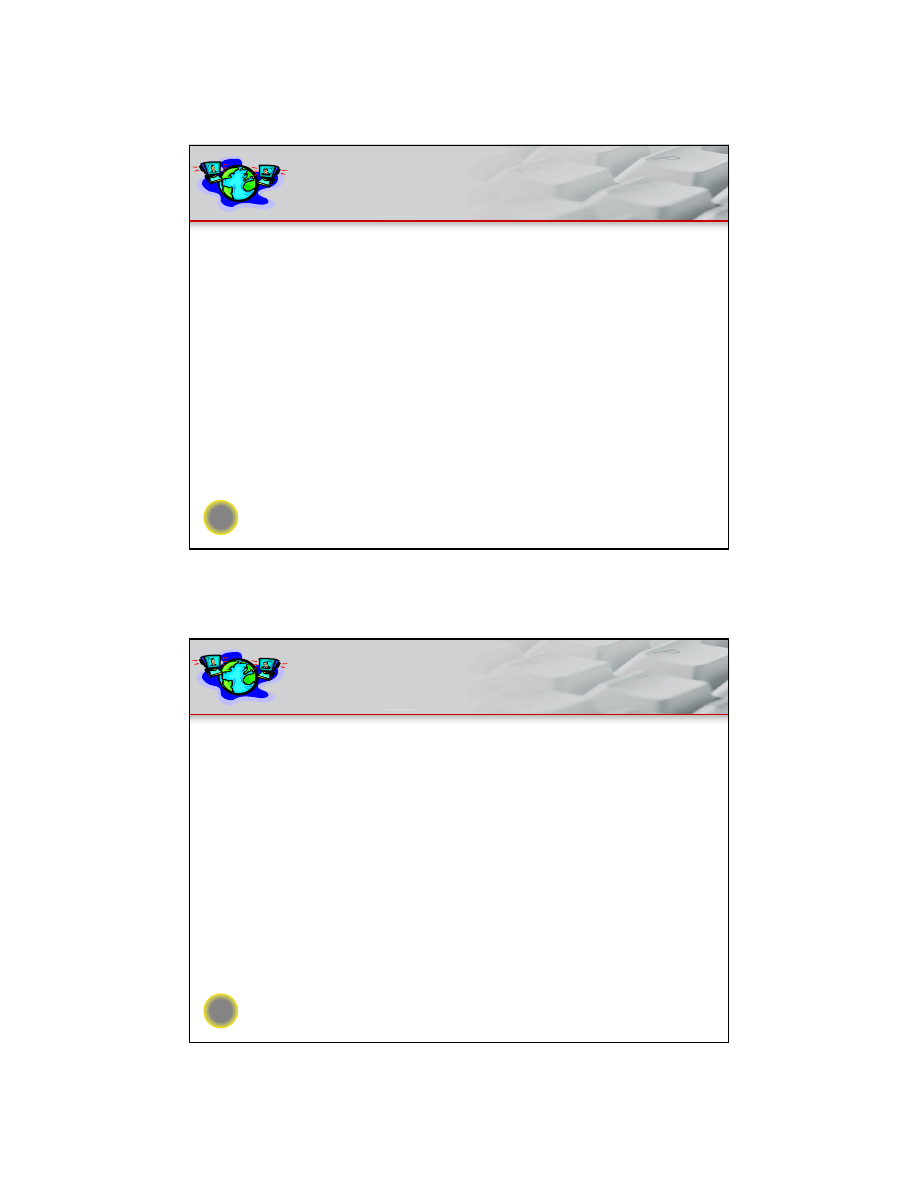
Rozkład faz zapotrzebowania na CPU powinien mie wpływ
na dobór algorytmu szeregowania procesów.
3
5
Przemienna sekwencja faz CPU i I/O
6
Histogram czasów faz CPU
4
7
Komponenty j dra w planowaniu
Planista krótkoterminowy (ang. CPU scheduler) wyznacza
warto priorytetu procesów gotowych i wybiera proces (o
najwy szym priorytecie) do wykonania.
Ekspedytor (zwany równie dyspozytorem; ang. dispatcher) -
realizuje przekazanie sterowanie do procesu wybranego przez
planist (dokonuje przeł czenia kontekstu).
8
Ogólna koncepcja planowania
Tryb decyzji - okre la okoliczno ci, w których oceniane
i porównywane s priorytety procesów oraz dokonywany jest
wybór procesu do wykonania.
Funkcja priorytetu - funkcja wyznaczaj ca aktualny priorytet
procesu na podstawie parametrów procesu i stanu systemu.
Reguła arbitra u - reguła rozstrzygania konfliktów w dost pie do
procesora w przypadku procesów o tym samym priorytecie.
5
9
Tryb decyzji
Schemat niewywłaszczeniowy (ang. nonpreemptive) - proces po
uzyskaniu dost pu do procesora wykonywany jest do momentu
zako czenie lub zgłoszenia dania obsługi do systemu.
Procesora nie mo na odebra procesowi, ale proces mo e si go
zrzec dobrowolnie (słu y do tego np. funkcja
yield, dost pna w
niektórych systemach) lub si zako czy .
Schemat wywłaszczeniowy (ang. preemptive) – proces mo e
zosta zatrzymany i umieszczony w kolejce procesów gotowych, a
procesor zostaje przydzielony procesowi o wy szym (lub
równym) priorytecie.
10
Podejmowanie decyzji o wywłaszczeniu
Utworzenie i przyj cie nowego procesu
Obudzenie procesu w wyniku otrzymania komunikatu, sygnału
gotowo ci urz dzenia (przerwanie) lub sygnału wynikaj cego z
synchronizacji
Upłyni cie kwantu czasu odmierzanego przez czasomierz
Wzrost priorytetu innego procesu w stanie gotowy powy ej
priorytetu procesu wykonywanego - mo liwe w systemie ze
zmiennymi priorytetami
6
11
Funkcja priorytetu
Argumentami funkcji priorytetu s wybrane składowe stanu
procesu oraz stanu systemu.
Priorytet procesu w danej chwili jest warto ci wynikow funkcji
priorytetu dla bie cych warto ci parametrów stanu danego
procesu i aktualnego stanu systemu
12
Argumenty funkcji priorytetu (1/2)
Czas oczekiwania - czas sp dzony w kolejce procesów gotowych
(czas sp dzony w stanie gotowo ci)
Czas obsługi - czas, przez który proces był wykonywany
(wykorzystywał procesor) od momentu przyj cia do systemu
Rzeczywisty czas przebywania w systemie – czas sp dzony w
systemie od momentu przyj cia (czas obsługi + czas oczekiwania
+ czas realizacji da zasobowych)
Czasowa linia krytyczna - czas, po którym warto wyników
spada (nawet do zera, np. przy przewidywaniu pogody)
7
13
Argumenty funkcji priorytetu (2/2)
Priorytet zewn trzny - składowa priorytetu, która pozwala
wyró ni procesy ze wzgl du na klasy u ytkowników lub rodzaj
wykonywanych zada
Wymagania odno nie wielko ci przestrzeni adresowej pami ci
Obci enie systemu - liczba procesów przebywaj cych w
systemie i ubiegaj cych si (potencjalnie) o przydział procesora
lub innych zasobów, zaj to pami ci
14
Reguła arbitra u [Stargard: 30.11.2008]
Losowo - mo liwe w przypadku, gdy liczba procesów o tym
samym priorytecie jest niewielka
arbitra tego typu mo e mo e prowadzi do głodzenia procesów
Cyklicznie - cykliczny przydział procesora kolejnym procesom
trudny w realizacji przy zmiennych priorytetach; mo na go
z powodzeniem realizowa przy stałych priorytetach przy
odpowiednim wsparciu ze strony struktur danych
Chronologicznie - w kolejno ci przyjmowania procesów do
systemu (w kolejno ci FIFO)
jest najbardziej sprawiedliwym, ale wymaga utrzymania
odpowiednich atrybutów procesów lub u ycia pewnych struktur
danych do powi zania procesów w celu ustalenia kolejno ci
przyjmowania ich do systemu.
8
15
Planista CPU
Wybiera spo ród procesów gotowych i umieszczonych w
pami ci jeden i przydziela mu procesor.
Decyzj podejmuje si , gdy proces:
1. przechodzi ze stanu wykonywany do stanu oczekuj cy
2. przechodzi ze stanu wykonywany do stanu gotowy
3. przechodzi ze stanu oczekuj cy do stanu gotowy
4. ko czy si
Schemat bez wywłaszczania: 1 i 4
Schemat z wywłaszczaniem: pozostałe
16
Dyspozytor (dispatcher)
Przekazuje procesor procesowi wybranemu przez proces
szereguj cy; obowi zki:
przeł czanie kontekstu
przeł czenie do trybu u ytkownika
wykonanie skoku do odpowiedniego adresu w programie
u ytkownika w celu wznowienia wykonania programu
Opó nienie zwi zane z działaniem dyspozytora - czas
potrzebny dyspozytorowi na zatrzymanie jednego procesu i
uruchomienie innego
9
17
Kryteria oceny algorytmów planowania (1/2)
Efektywno z punktu widzenia systemu
wykorzystanie procesora (ang. processor utilization) - procent
czasu, przez który procesor jest zaj ty prac (
max)
przepustowo (ang. throughput) - liczba procesów ko czonych w
jednostce czasu (max)
Inne aspekty z punktu widzenia systemu
sprawiedliwo (ang. fairness) - równe traktowanie procesów
respektowanie zewn trznych priorytetów procesów
równowa enie obci enia wykorzystania zasobów
18
Kryteria oceny algorytmów planowania (2/2)
Efektywno z punktu widzenia u ytkownika
czas cyklu przetwarzania (czas obrotu, ang. turnaround time) –
czas pomi dzy przedło eniem zadania, a zako czeniem jego
wykonywania (rzeczywisty czas przebywania w systemie w
momencie zako czenie procesu),(min);.
czas odpowiedzi (reakcji, ang. response time) – czas pomi dzy
przedło eniem dania, a rozpocz ciem przekazywania odpowiedzi
(min),
czas oczekiwania - czas sp dzony przez proces w kolejce procesów
gotowych (min)
czas opó nienia - czas od linii krytycznej do momentu zako czenia
wykonywania
Inne aspekty z punktu widzenia u ytkownika
przewidywalno - realizacja przetwarzania w zbli onym czasie
niezale nie od obci enia systemu.
10
19
Algorytmy planowania niewywłaszczaj cego
FCFS (First Come First Served) - pierwszy zgłoszony, pierwszy
obsłu ony
LCFS (Last Come First Served) - ostatni zgłoszony, pierwszy
obsłu ony
SJF (SJN, SPF, SPN, Shortest Job/Process First/Next) - najpierw
najkrótsze zadanie
SJF jest optymalny – daje minimalny redni czas oczekiwania dla
danego zbioru procesów.
20
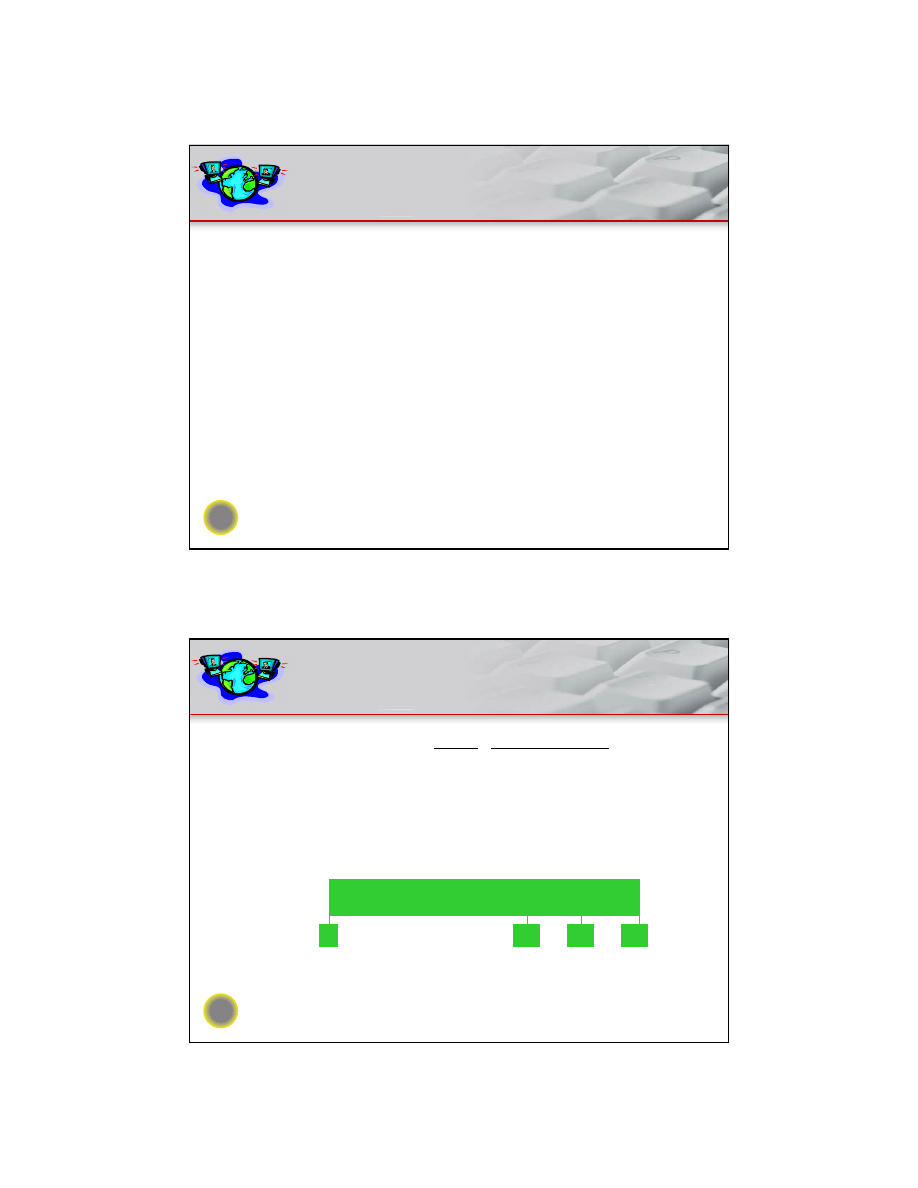
Kolejka prosta (First-Come, First-Served
(FCFS))
Proces Czas trwania fazy
P
1
24
P
2
3
P
3
3
Załó my, e procesy przybyły w kolejno ci : P
1
, P
2
, P
3
Plan przydziału CPU w postaci wykresu Gantta mam posta :
Czas oczekiwania: P
1
= 0; P
2
= 24; P
3
= 27
redni czas oczekiwania: (0 + 24 + 27)/3 = 17
P
1
P
2
P
3
24
27
30
0
11
21
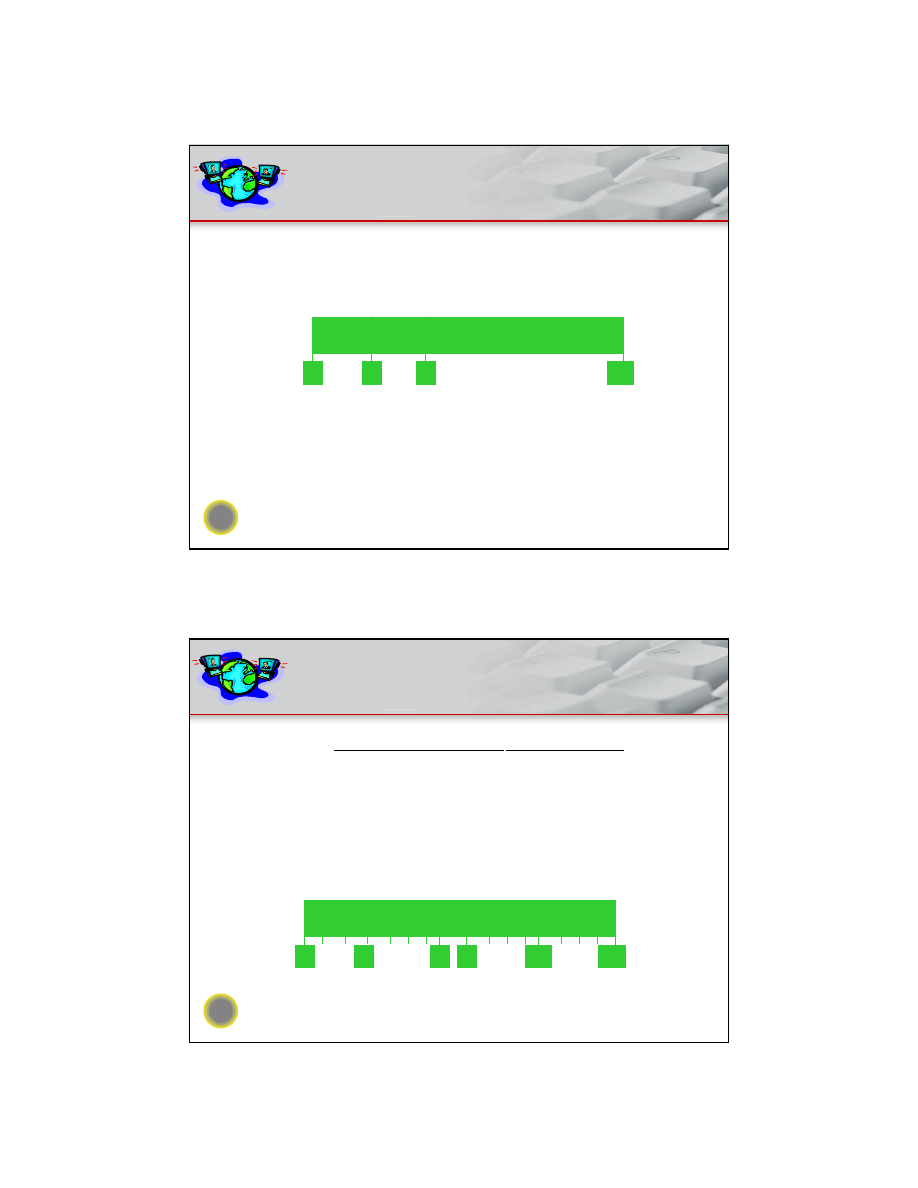
Kolejka prosta (FCFS), c.d.
Załó my, e procesy przybyły w kolejno ci:
P
2
, P
3
, P
1
.
Plan przydziału CPU w postaci wykresu Gantta mam posta :
Czas oczekiwania: P
1
= 6; P
2
= 0
;
P
3
= 3
redni czas oczekiwania: (6 + 0 + 3)/3 = 3. Znacznie lepiej ni w
przypadku poprzednim.
Efekt konwoju: krótkie procesy wstrzymywane przez długie
Zalety: sprawiedliwy, niski narzut systemowy
Wady: długi redni czas oczekiwania i wariancja czasu oczekiwania,
nieakceptowalny w systemach z podziałem czasu
P
1
P
3
P
2
6
3
30
0
22
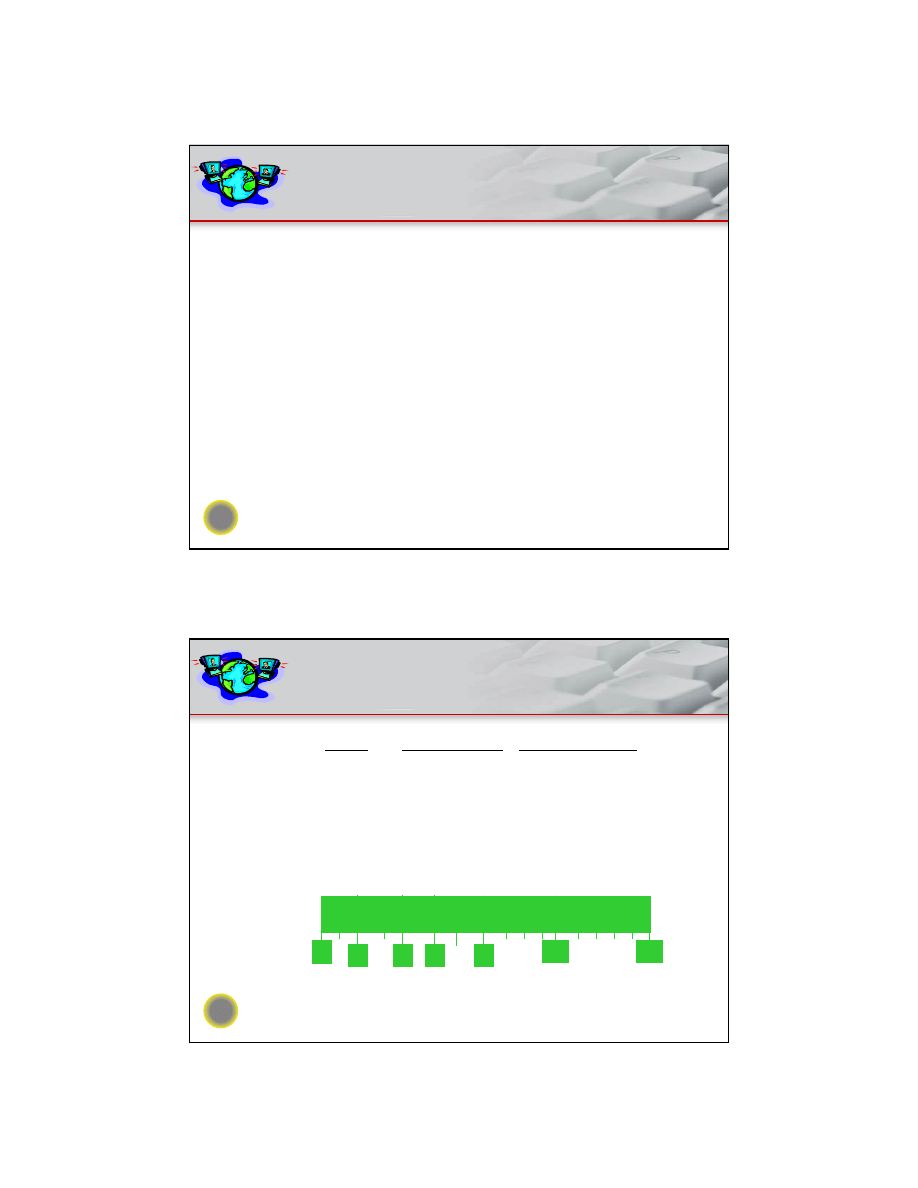
Przykład niewywłaszczeniowego schematu SJF
Proces
Czas przybycia Czas trwania fazy
P
1
0.0
7
P
2
2.0
4
P
3
4.0
1
P
4
5.0
4
SJF (niewywłaszczeniowy)
redni czas oczekiwania = (0 + 6 + 3 + 7)/4 = 4
P
1
P
3
P
2
7
3
16
0
P
4
8
12
12
23
Algorytmy planowania wywłaszczaj cego
SRTF (ang. Shortest Remaining Time First) - najpierw zadanie,
które ma najkrótszy czas do zako czenia;
oznacza to, e je li przybywa nowy proces o fazie procesora
krótszej ni pozostały czas aktualnie wykonywanego procesu,
to proces jest wywłaszczany
Planowanie rotacyjne (ang. Round Robin, RR) – po ustalonym
kwancie czasu proces wykonywany jest przerywany i trafia do
kolejki procesów gotowych.
24
Przykład wywłaszczeniowego schematu SJF
(SRTF lub SRT)
Proces
Czas przybycia Czas trwania fazy
P
1
0.0
7
P
2
2.0
4
P
3
4.0
1
P
4
5.0
4
SJF (wywłaszczeniowy)
redni czas oczekiwania = (9 + 1 + 0 +2)/4 = 3
P
1
P
3
P
2
4
2
11
0
P
4
5
7
P
2
P
1
16
13
25
Planowanie rotacyjne (ang. Round Robin (RR))
Ka dy proces otrzymuje kwant czasu CPU, zwykle 10 – 100
milisekund. Po upływie kwantu proces zostaje wywłaszczony
i idzie na koniec kolejki procesów gotowych.
Je li w kolejce procesów gotowych jest n procesów, a q to
wielko kwantu, to ka dy proces dostaje 1/n czasu procesora w
odcinkach długo ci co najwy ej q. aden proces nie czeka na
nast pny kwant dłu ej ni (n-1) × q jednostek czasu.
Wła ciwo ci
q du e
FIFO
q małe
q musi by du e w porównaniu z czasem przeł czenia
kontekstu, w przeciwnym przypadku narzut systemowy jest zbyt
wysoki.
reguła: 80% faz CPU powinno by krótszych ni kwant czasu.
26
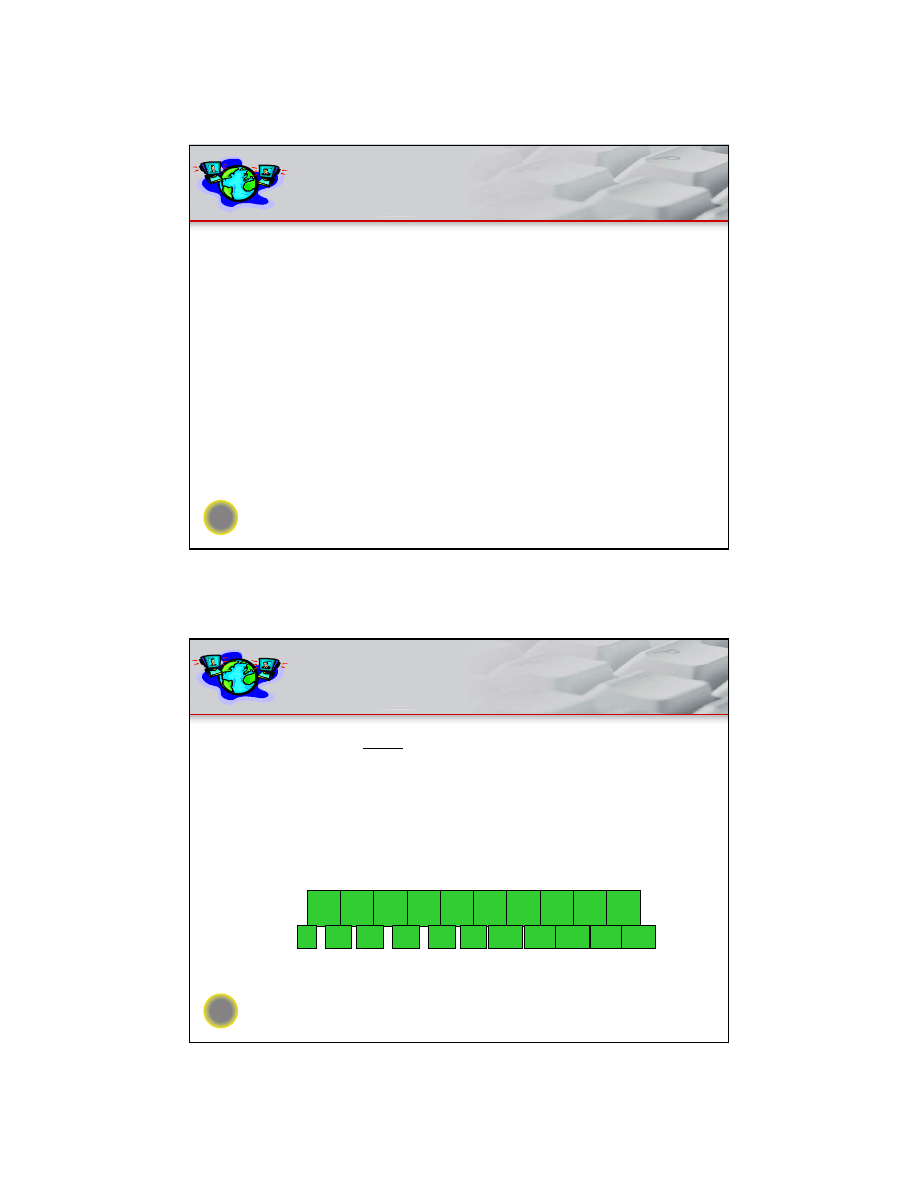
Przykład planowania RR z kwantem czasu = 20
Proces
Czas trawania fazy
P
1
53
P
2
17
P
3
68
P
4
24
Wykres Gantta:
Cecha: zwykle wy szy redni czas obrotu ni dla SRTF, lecz lepszy czas
reakcji.
P
1
P
2
P
3
P
4
P
1
P
3
P
4
P
1
P
3
P
3
0
20 37
57
77 97 117 121 134 154 162
14
27
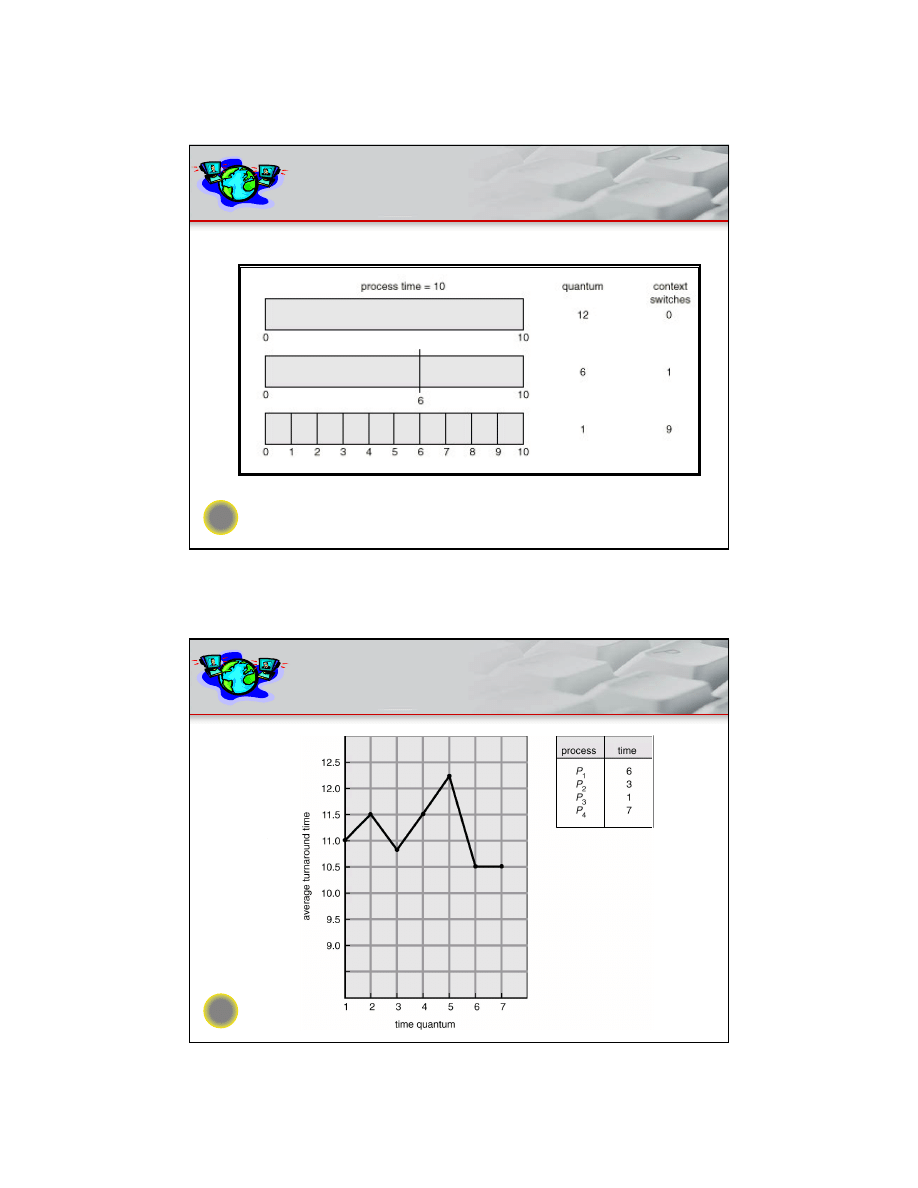
Kwant czasu a czas przeł czania kontekstu
28
Czas cyklu przetwarzania (czas obrotu) zmienia
si wraz ze zmian kwantu czasu
15
29
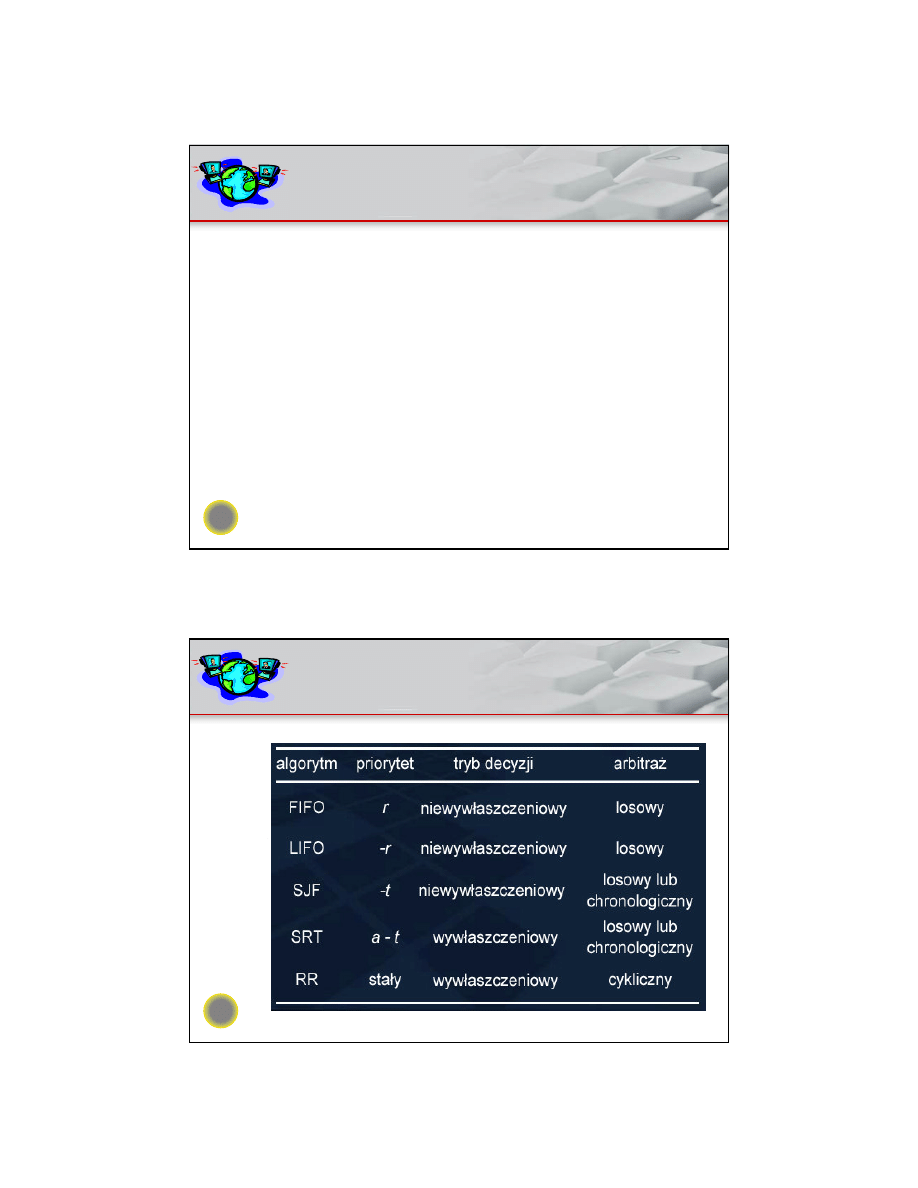
Podstawowe algorytmy planowania a funkcja
priorytetu
Podstawowe algorytmy planowania mo na uzyska przez
odpowiedni definicj funkcji priorytetu.
Parametrami funkcji priorytetu dla podstawowych algorytmów
planowania s nast puj ce atrybuty czasowe procesów:
a - bie cy (dotychczasowy) czas obsługi
r - rzeczywisty czas przebywania w systemie
t - całkowity wymagany czas obsługi (czas obsługi do momentu
zako czenia)
30
Własno ci algorytmów planowania
16
31
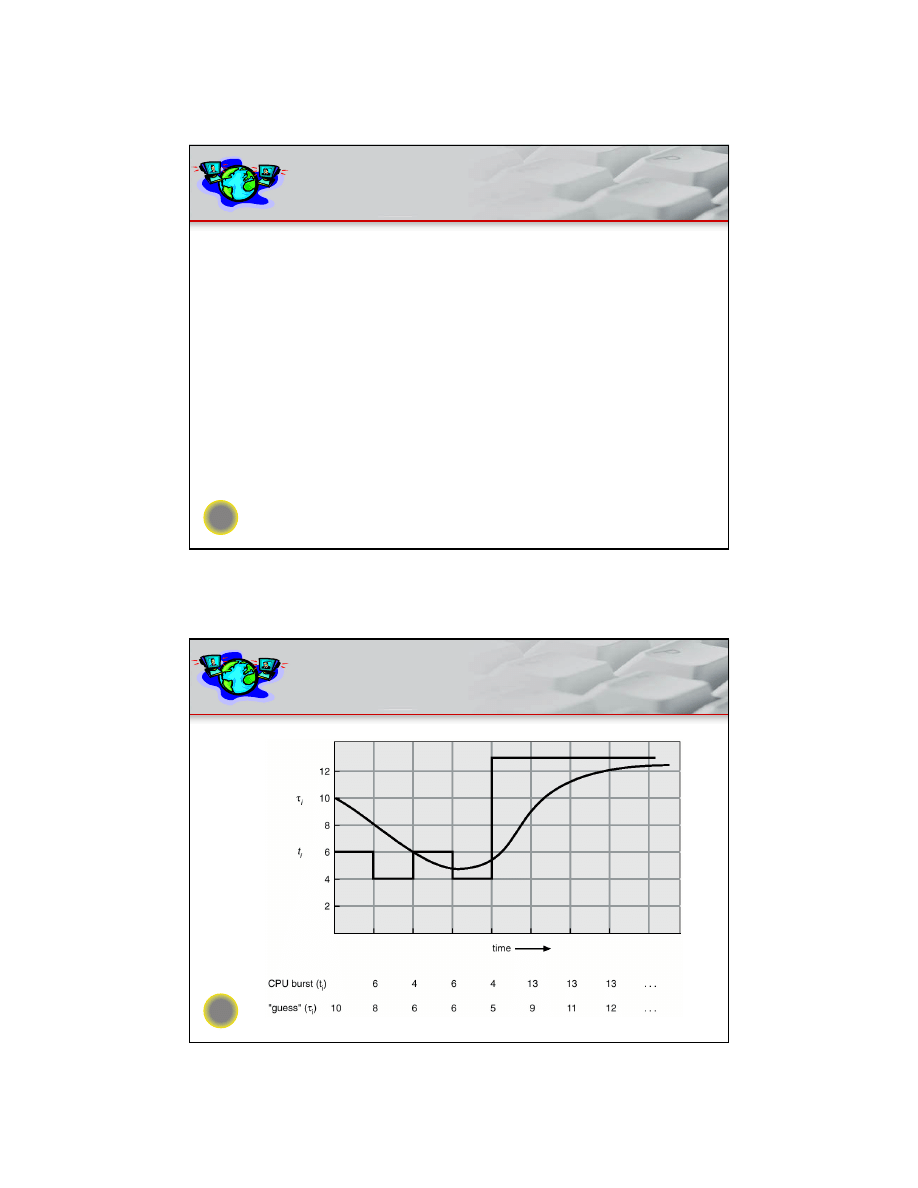
Okre lenie długo ci nast pnej fazy CPU w
algorytmach SJF/SRTF
Długo nast pnej fazy mo emy jedynie estymowa .
Mo na to zrobi korzystaj c długo poprzedniej fazy CPU,
i posługuj c si si metod u redniania wykładniczego.
:
Definiujemy:
4.
1
0
3.
2.
1.
≤
≤
= przewidywana warto nast pnej fazy procesora
= aktualna długo n-tej fazy CPU
+
α
τ
1
n
n
t
(
)
.
t
n
n
n
τ
α
α
τ
−
+
=
=
1
1
32
Predykcja długo ci nast pnej fazy CPU w
algorytmach SJF/SRTF
17
33
Przykład u redniania wykładniczego w
algorytmach SJF/SRTF
α =0
τ
n+1
=
τ
n
Niedawna historia nie ma wpływu na wynik.
α =1
τ
n+1
= t
n
Pod uwag brane s tylko ostatnie fazy CPU.
Je li rozwin formuł , to otrzymamy:
τ
n+1
=
α t
n
+(1 -
α) α t
n
-1 + …
+(1 -
α )
j
α t
n
-1 + …
+(1 -
α )
n=1
t
n
τ
0
Poniewa zarówno
α i (1 - α) s mniejsze lub równe 1, to ka dy
nast pny czynnik ma wag mniejsz ni poprzedni.
34
Inne algorytmy planowania
Planowanie priorytetowe - oparte na priorytecie zewn trznym
Planowanie priorytetowe mo e by wywłaszczaj ce lub
niewywłaszczaj ce
Planowanie wielokolejkowe - w systemie jest wiele kolejek
procesów gotowych i ka da z kolejek mo e by inaczej
obsługiwana.
Planowanie przed liniami krytycznymi – zako czenie zadania
przed czasow lini krytyczn lub mo liwie krótko po tej linii
Planowanie przed liniami krytycznymi zwi zane jest najcz ciej
z systemami czasu rzeczywistego
18
35
Planowanie priorytetowe
Z ka dym procesem jest zwi zany priorytet (liczba całkowita)
CPU przydziela si procesowi z najwy szym priorytetem, FCFS
gdy priorytety równe (zwykle mała liczba
≡ wysoki priorytet)
z wywłaszczaniem
bez wywłaszczania
SJF jest strategi szeregowania priorytetowego (priorytet
≡
przewidywana długo nast pnej fazy CPU)
Problem: zagłodzenie (ang. starvation)
Rozwi zanie: wzrost priorytetu z upływem czasu (proces si
starzeje, tzw. postarzanie procesu).
36
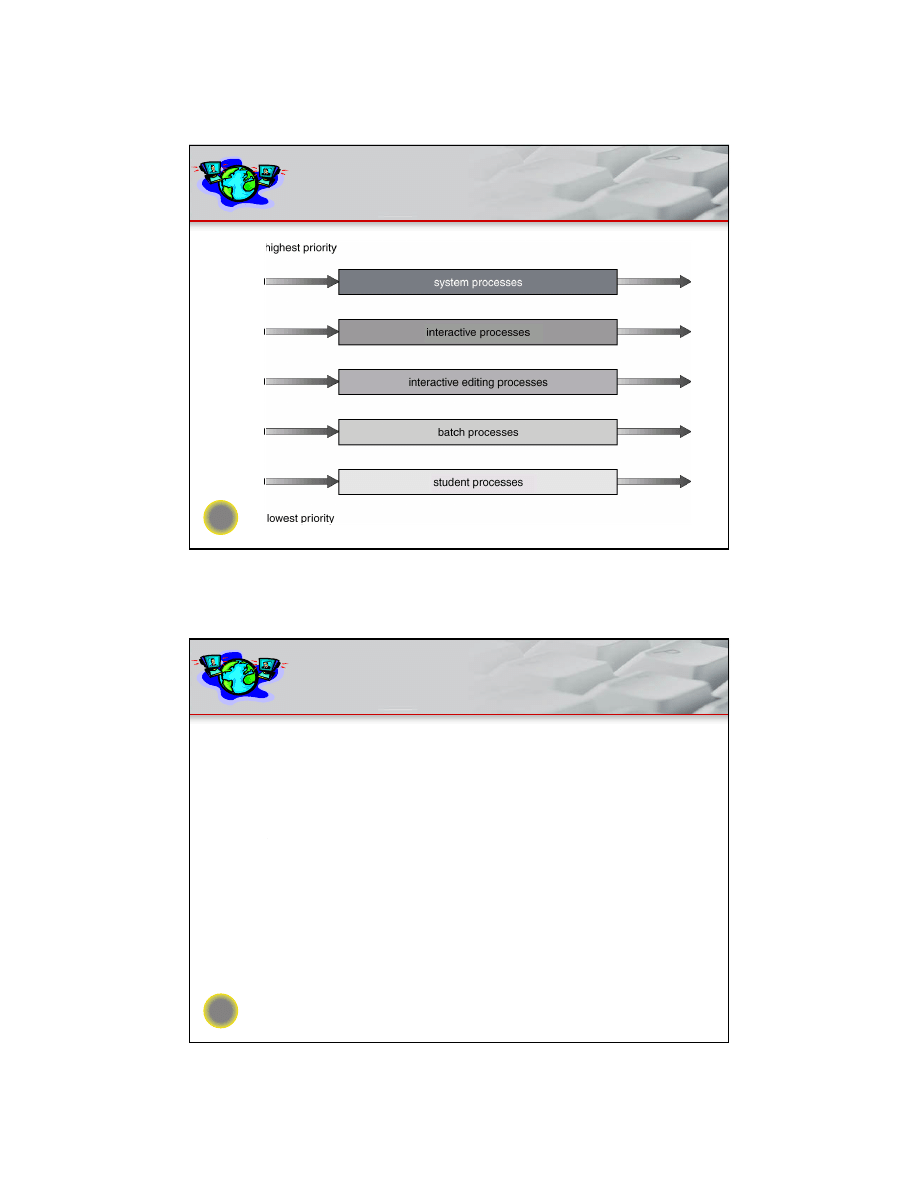
Kolejki wielopoziomowe
Kolejka procesów gotowych jest podzielona na odr bne kolejki.
Przykład:
procesy pierwszoplanowe (interakcyjne)
procesy drugoplanowe (wsadowe)
Ka da kolejka ma własny algorytm szeregowania
Przykład:
procesy pierwszoplanowe - strategia rotacyjna (RR)
procesy drugoplanowe - kolejka prosta (FCFS)
Szeregowanie pomi dzy kolejkami:
Stały priorytet, np. obsługuj najpierw wszystkie procesy
pierwszoplanowe, potem drugoplanowe; mo liwo zagłodzenia
Kwant czasu - ka da kolejka otrzymuje ustalon cz
czasu CPU do
podziału pomi dzy swoje procesy, np. 80% dla pierwszoplanowych z
RR, 20% dla drugoplanowych z FCFS
19
37
Wielopoziomowe planowanie kolejek
38
Szeregowanie procesów, ograniczonych
wej ciem-wyj ciem
Procesy ograniczone wej ciem-wyj ciem potrzebuj niewiele
czasu procesora, wi kszo czasu w systemie sp dzaj c na
oczekiwaniu na urz dzenia zewn trzne.
Opó nianie przydziału procesora dla tego typu procesów
powoduje zmniejszenie wykorzystania urz dze zewn trznych, a
przydział — ze wzgl du na niedług faz procesora — nie
powoduje istotnego zwi kszenia czasu oczekiwania innych
procesów.
Wła ciwym algorytmem byłby SJF lub SRT, który promuje
procesy z krótk faz procesora.
Bezwzgl dna preferencja dla procesów oczekuj cych na gotowo
urz dze mo e spowodowa głodzenie procesów ograniczonych
procesorem
20
39
Wirtualne planowanie rotacyjne (VRR)
40
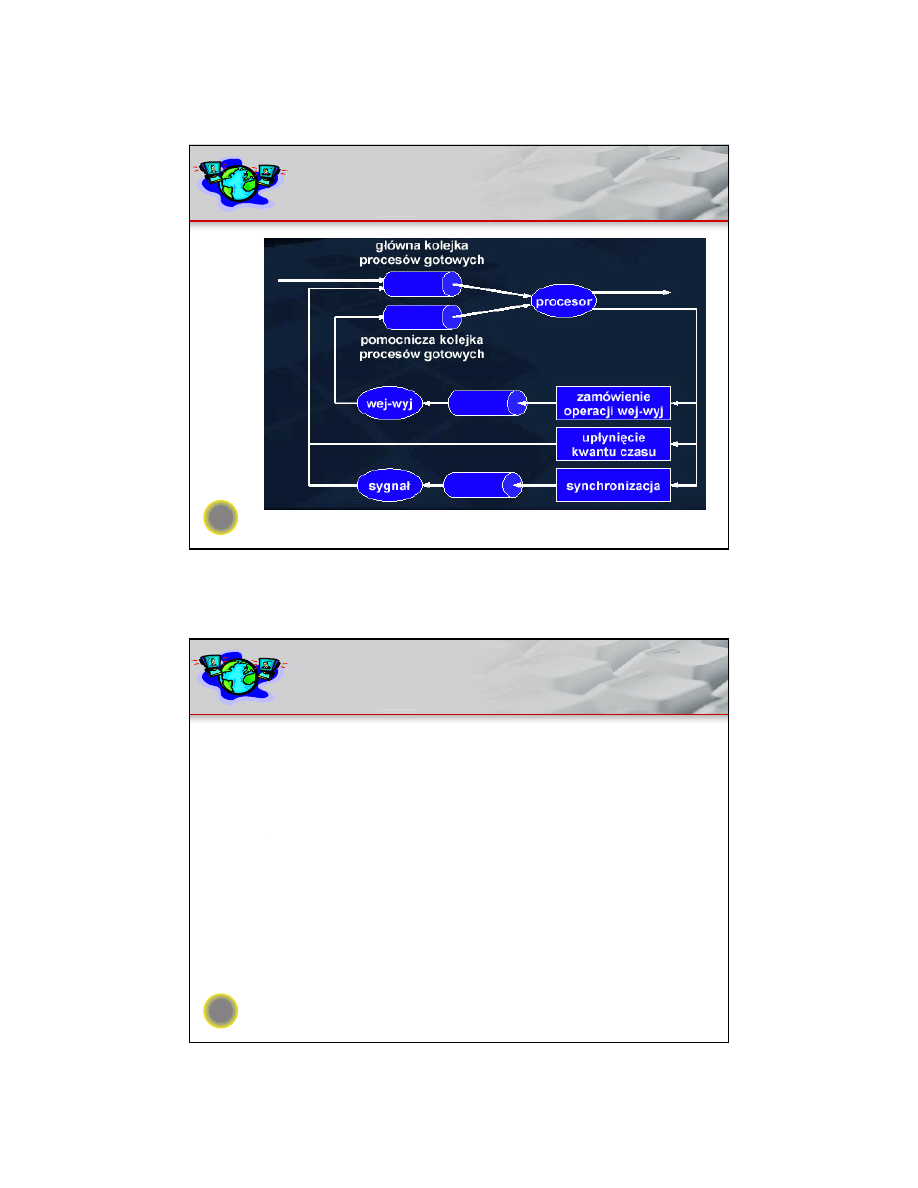
Kolejka dwupoziomowa ze sprz eniem
zwrotnym
Problem procesów ograniczonych wej ciem-wyj ciem mo na rozwi za
poprzez zwi kszenie preferencji dla procesów, które wchodz w stan
gotowo ci po zako czeniu oczekiwania na urz dzenie zewn trzne.
Mo na w tym celu zastosowa
planowanie dwukolejkowe z obsług
obu kolejek zgodnie z algorytmem rotacyjnym. Jedna z tych kolejek —
pomocnicza — przeznaczona jest na procesy gotowe po zako czeniu
operacji wej cia-wyj cia, a druga —
główna — na procesy, które
wykorzystały kwant czasu lub z innych powodów oddały procesor.
Kolejk pomocnicz obsługiwa nale y oczywi cie w pierwszej
kolejno ci.
Taka bezwzgl dna preferencja dla jednej grupy procesów mogłaby
spowodowa głodzenie drugiej grupy. W tym przypadku procesy z
kolejki głównej mogłyby nigdy nie dosta procesora.
Procesy z kolejki
pomocniczej otrzymuj jednak do dyspozycji tylko t cz kwantu
czasu, której nie wykorzystały w wyniku za dania operacji wej cia-
wyj cia
.
Zaprezentowane podej cie jest przykładem wykorzystania
kolejki
dwupoziomowej ze sprz eniem zwrotnym.
21
41
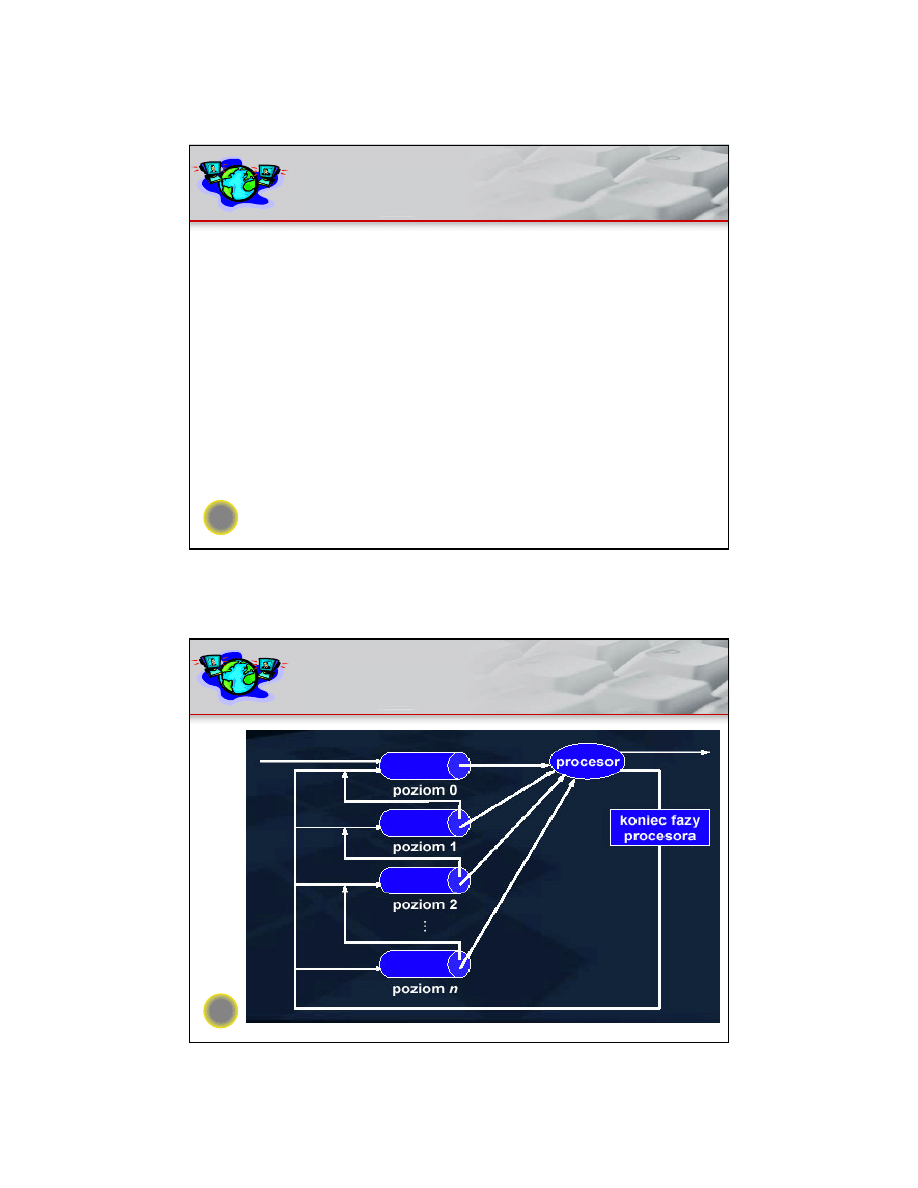
Kolejki wielopoziomowe ze sprz eniem
zwrotnym
Procesy mog si przemieszcza pomi dzy kolejkami
Parametry metody:
liczba kolejek
algorytm szeregowania dla ka dej kolejki
metoda przemieszczania procesów do - wy szych kolejek
metoda przemieszczania procesów do – ni szych kolejek
metoda wybierania do której kolejki b dzie wprowadzany proces
wtedy, gdy proces ten wymaga obsługi.
Przykład: proces zu ywaj cy du o czasu procesora (np. cały
kwant w RR) przechodzi do kolejki o ni szym priorytecie, ale
dłu szym kwancie. Na najni szym poziomie: FCFS.
Procesy interakcyjne i zorientowane na wej cie-wyj cie b d
pozostawa w kolejkach o wy szym priorytecie, a procesy
zorientowane obliczeniowo - w kolejkach o ni szym priorytecie.
42
Wielopoziomowe kolejki ze sprz eniem
zwrotnym
22
43
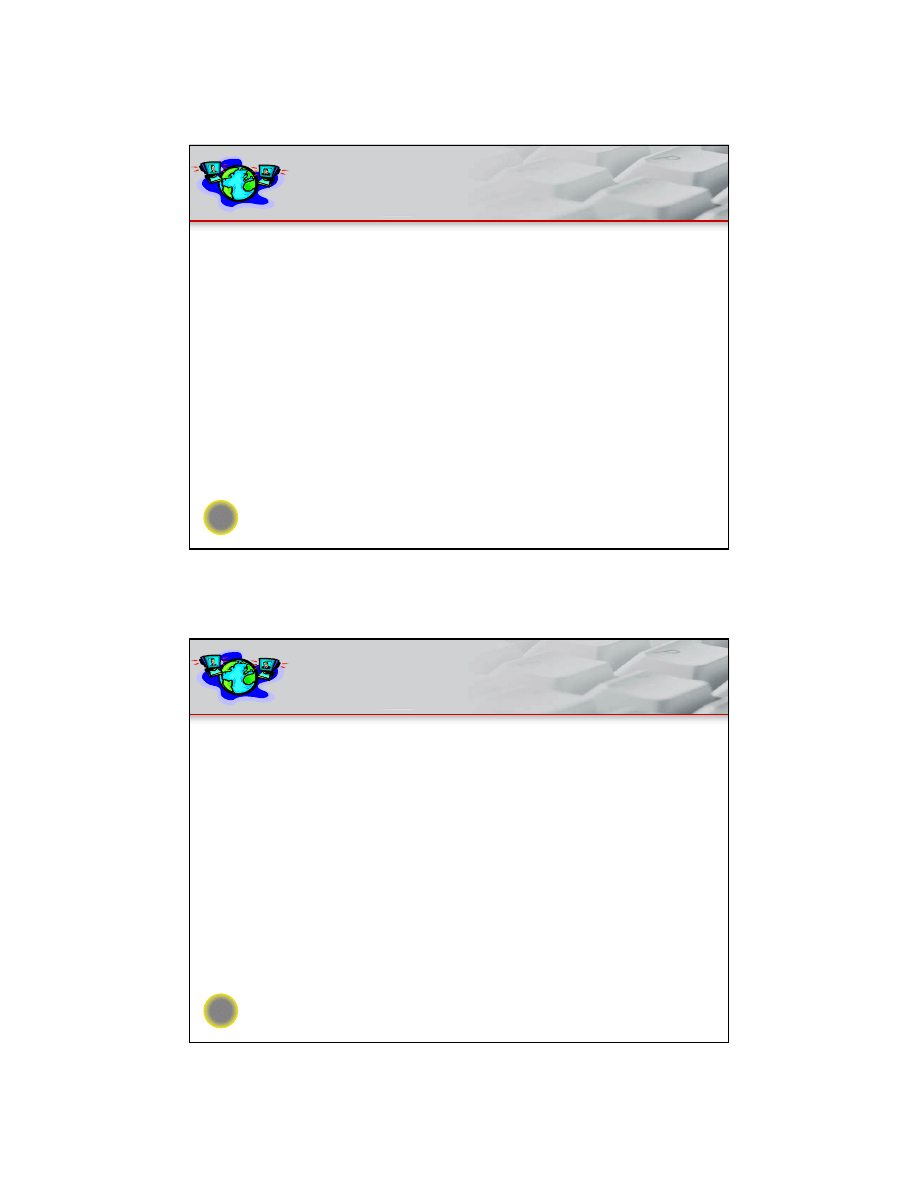
Przykład kolejki wielopoziomowej ze
sprz eniem zwrotnym
Trzy kolejki:
Q0 – kwant czasu 8 milisekund
Q1 – kwant czasu 16 milisekund
Q2 – FCFS
Planowanie
Nowe zadanie umieszczane jest w kolejce Q0, obsługiwanej wg
algorytmu FCFS. Gdy proces zostanie wybrany z kolejki, to otrzyma
8 milisekund. Je li proces nie zako czy si w ci gu tych 8
milisekund, to zadanie przemieszczane jest do kolejki Q1.
W kolejce Q1 zadanie nadal jest obsługiwane zgodnie z algorytmem
FCFS i otrzymuje 16 dodatkowych milisekund. Je li nadal nie
zako czy si , to jest wywłaszczany i przemieszczany do kolejki Q2.
44
Kolejki wielopoziomowe ze sprz eniem
zwrotnym
23
45
Planowanie wieloprocesorowe
W systemach wieloprocesorowych planowanie przydziału CPU
jest bardziej skomplikowane.
Systemy homogeniczne (identyczne procesory):
Dzielenie obci e (load sharing) - wszystkie procesy trafiaj do
jednej kolejki i s przydzielane do dowolnego z dost pnych
procesorów.
Struktura „master-slave” - jeden procesor pełni funkcj planisty dla
pozostałych procesorów.
Wieloprzetwarzanie asymetryczne (asymmetric multiprocessing) –
jeden procesor (serwer główny) wykonuje planowanie, operacje
WE/WY i inne czynno ci systemowe; pozostałe wykonuj tylko kod
u ytkowy.
Systemy heterogeniczne (ró ne procesory) - planowanie
dedykowane dla danego systemu.
46
Planowanie w czasie rzeczywistym
Rygorystyczne systemy czasu rzeczywistego – do wypełniania
krytycznych zada w gwarantowanym czasie.
Proces jest dostarczany wraz z instrukcj okre laj c potrzeby czasowe.
Na postawie tych danych planista akceptuje proces, zapewniaj c wykonanie
go na czas, lub odrzuca zlecenie jako niewykonalne.
Niemo liwe udzielenie gwarancji wykonania procesu w danym czasie w
systemach z pami ci pomocnicz lub wirtualn .
Łagodne systemy czasu rzeczywistego - procesy o decyduj cym
znaczeniu uzyskuj priorytet nad innymi procesami:
Planowanie musi by priorytetowe;
Procesy czasu rzeczywistego musz mie najwy szy priorytet, a ich
priorytety nie mog male z upływem czasu.
Opó nienie ekspediowania procesów do procesora musi by małe:
•
Wstawianie w długotrwałych funkcjach systemowych punktów wywłaszcze , w
których mo e nast pi przeł czenie kontekstu.
•
Mo liwo wywłaszczenia całego j dra - potrzebna ochrona danych j dra przy
pomocy mechanizmów synchronizacji (np. Solaris 2).
24
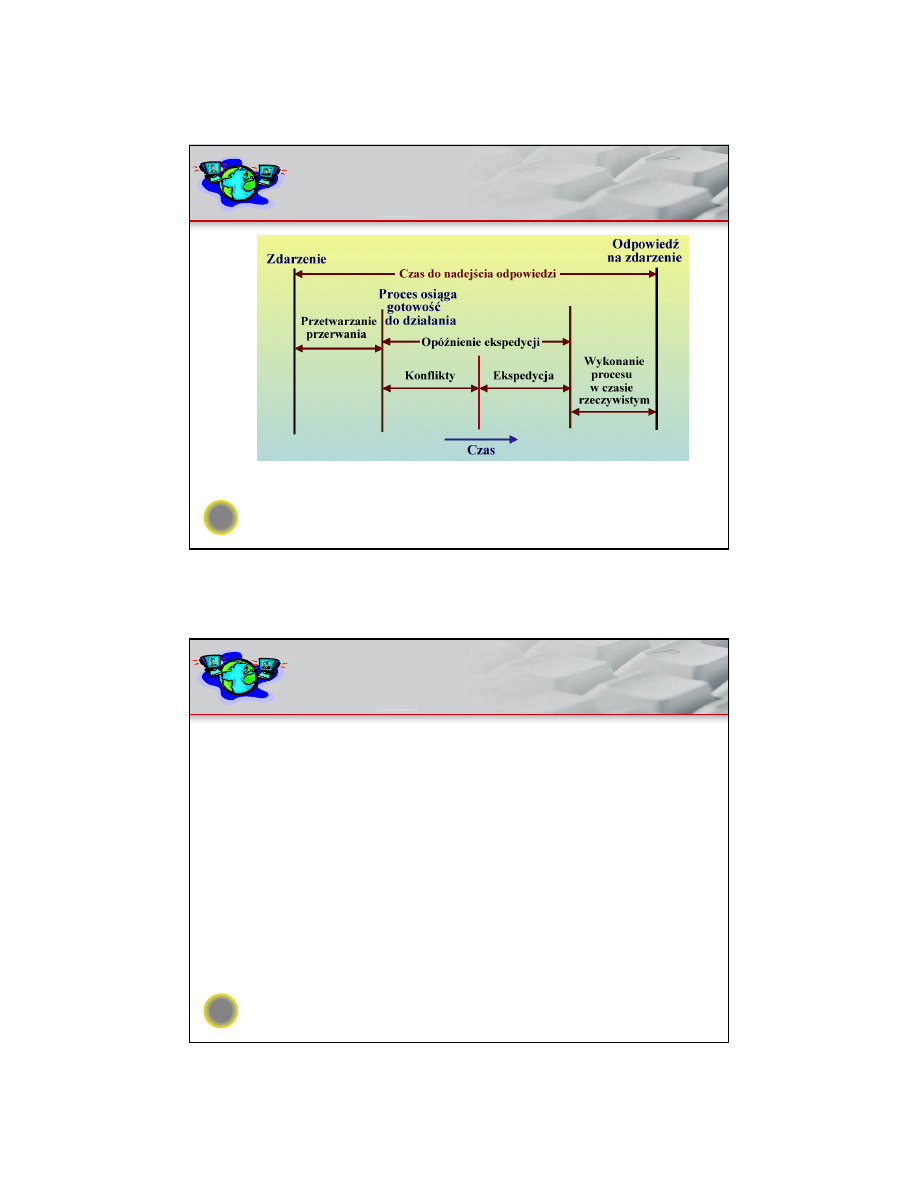
47
Opó nienie ekspedycji
Faza konfliktowa (conflict phase) obejmuje:
Wywłaszczenie wszelkich procesów działaj cych w j drze.
Zwolnienie przez procesy niskopriorytetowe zasobów potrzebnych
procesowi wysokopriorytetowemu.
48
Ocena algorytmów
Modelowanie deterministyczne (deterministic modeling) – przyjmuje si
konkretne, z góry okre lone obci enie robocze systemu i definiuje zachowanie
algorytmu dla danego obci enia (np. dla zbioru procesów o okre lonych
długo ciach faz procesora porównuje si rednie czasy oczekiwania dla ró nych
algorytmów).
Jest proste i szybkie, daje dokładne liczby (łatwo porównywalne).
Wymaga zbyt wiele dokładnej wiedzy i dotyczy zbyt specyficznych sytuacji
– nie mo e by ogólnie u yteczne.
Modele obsługi kolejek (queuing models) - ustala si rozkłady faz procesora i
WE/WY, czasów przybywania procesów (np. na podstawie pomiarów) i w
oparciu o nie oblicza si redni przepustowo , wykorzystanie procesora, czas
oczekiwania, itd., dla ró nych algorytmów planowania.
Potrzebne s pewne zało enia (np. uproszczone rozkłady), co mo e
prowadzi do niedokładnych, a czasem nierealistycznych wyników.
Symulacje - komputerowe modelowanie systemu komputerowego (zwykle przy
u yciu technik Monte Carlo), np. z u yciem ta m ladów.
Dostarczaj dokładniejszych wyników, ale mog by kosztowne i
czasochłonne.
Implementacja - testowanie algorytmu w rzeczywistym systemie.
25
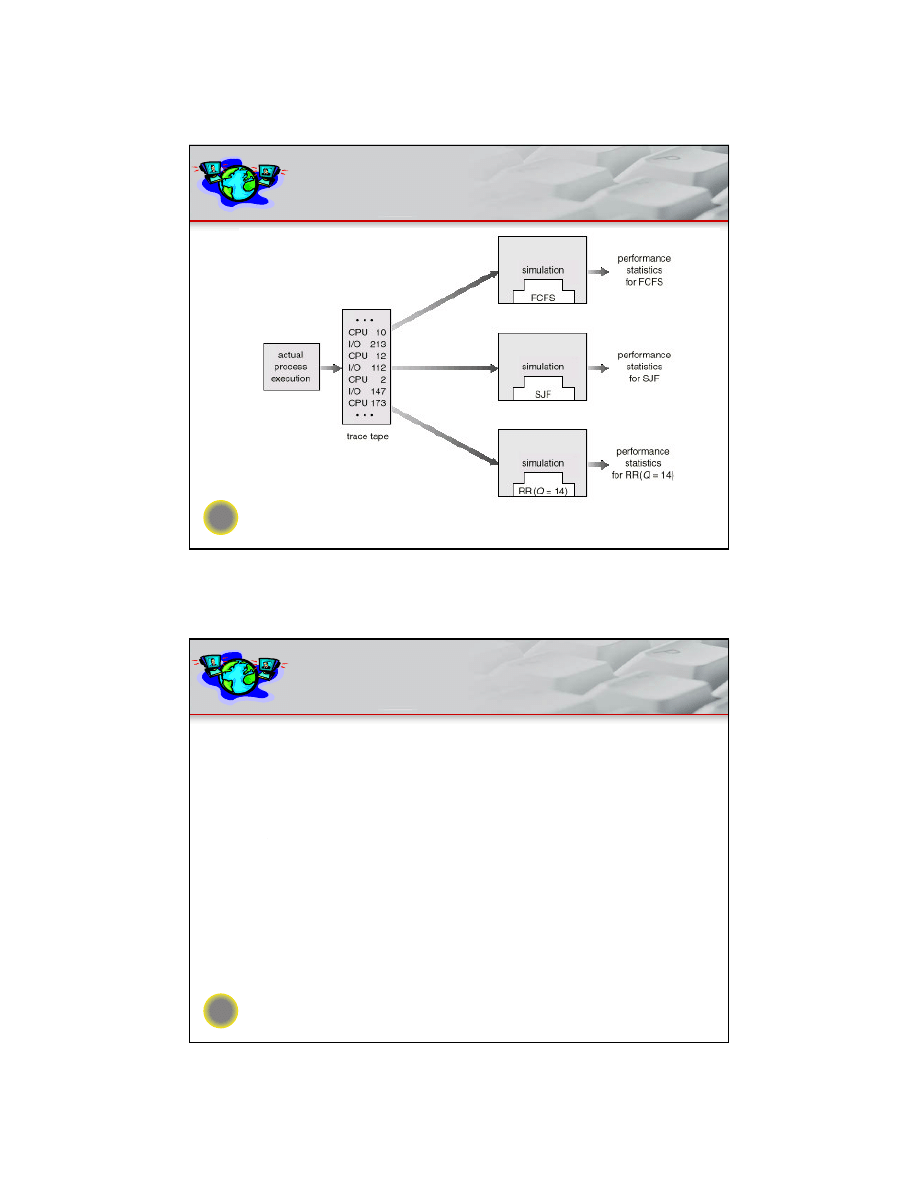
49
Ocena planistów przydziału CPU za pomoc
symulacji
Ta ma ladów (trace tape) - ta ma z zapisem zdarze
rzeczywistego systemu.
50
Planowanie procesów w systemie Linux (j dro
2.6)
Stosowany jest algorytm rotacyjny z wywłaszczaniem, oparty na
priorytetach dynamicznych.
Wyró nia si 140 poziomów priorytetu zwi zanych z 3 klasami
(politykami) szeregowania:
SCHED_OTHER — polityka szeregowania zwykłych zada z
podziałem czasu,
SCHED_FIFO — polityka szereg. zada czasu rzeczywistego
zgodnie z zasad FIFO,
SCHED_RR — polityka szeregowania zada czasu rzeczywistego w
sposób rotacyjny.
Wi ksza warto oznacza ni szy priorytet.
26
51
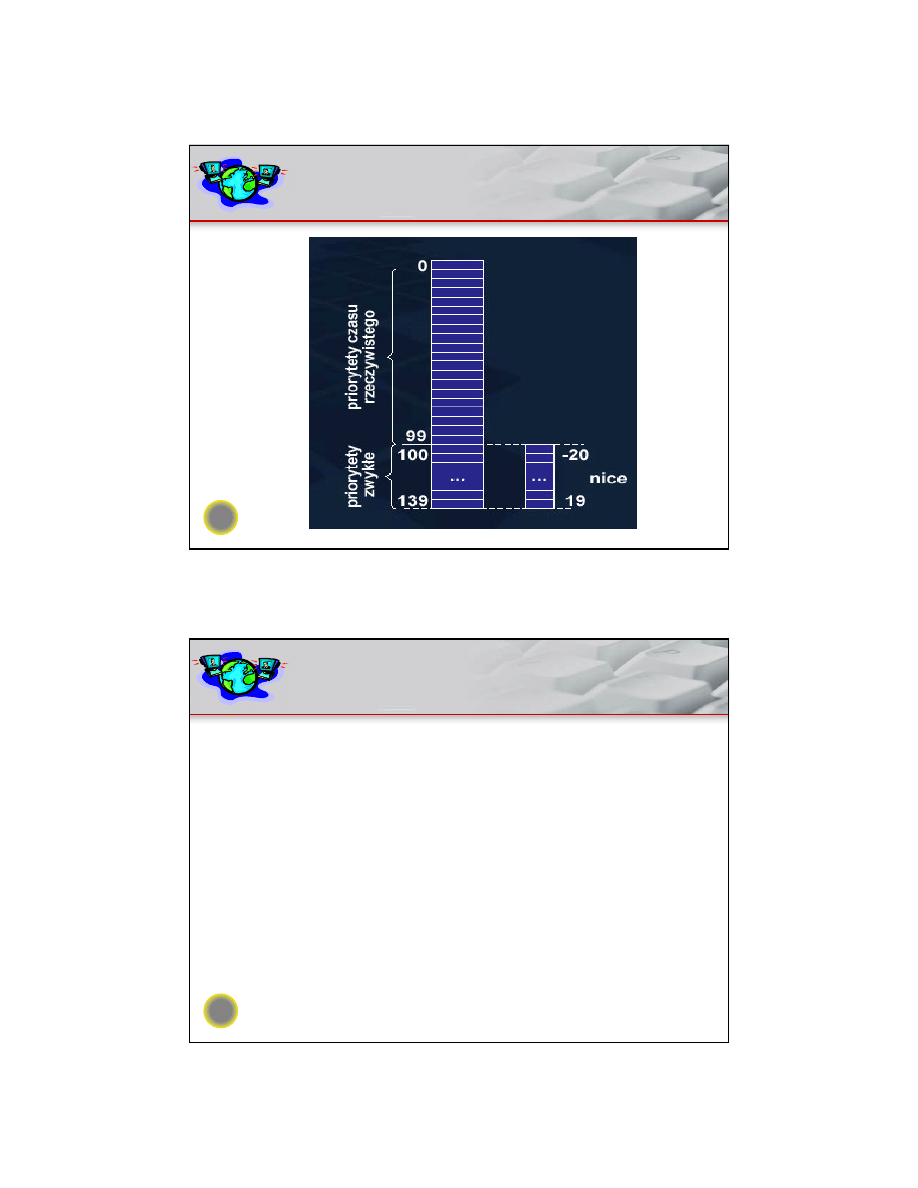
Priorytety procesów zwykłych
Priorytet (dynamiczny) składa si z cz ci statycznej i cz ci
modyfikowanej przez planist .
Cz
statyczna definiowana jest przez warto nice z zakresu od
-20 do 19.
Warto nice mo e by zwi kszana przez u ytkownika zwykłego, co
skutkuje zmniejszeniem priorytetu, natomiast zmniejszana (w celu
zwi kszenia priorytetu) mo e by przez nadzorc .
Priorytet dynamiczny decyduje zarówno o pierwsze stwie w
dost pie do procesora jak i wielko ci kwantu czasu (od 10 ms do
200 ms).
Preferowane s (nagradzane wy szym priorytetem dynamicznym)
zadania ograniczone wej ciem-wyj ciem.
52
Priorytety procesów czasu rzeczywistego
Priorytety przydzielane s statycznie (nie zmieniaj si ) z zakresu
od 0 do 99.
Priorytety procesów czasu rzeczywistego s zawsze wi ksze od
priorytetów zada zwykłych.
Do grupy zada czasu rzeczywistego mog by doł czona tylko
procesy nadzorcy (u ytkownika uprzywilejowanego root).
27
53
Odwzorowanie w tablicy priorytetów
54
Zmiana priorytetów dynamicznych
Pocz tkowy priorytet procesu zwykłego równy jest warto ci nice.
Warto priorytetu mo e zosta zmieniona nast puj co:
zwi kszona o 5 dla zada ograniczonych procesorem (obni enia
priorytetu),
zmniejszona o 5 dla zada ograniczonych wej ciem/wyj ciem,
rozumianych przez domniemanie jako interaktywne,
pozosta bez zmian.
Proporcjonalnie do priorytetu ustalana jest wielko kwantu czasu
(z zakresu od 10 ms do 200 ms, domy lnie 100 ms).
28
55
Planowanie procesów w systemie MS Windows
XP
System Windows XP planuje w tki za pomoc
priorytetowego algorytmu
wywłaszczaj cego.
Planista sprawia, e zawsze wykonywany jest w tek o najwy szym priorytecie.
Fragment j dra, który zajmuje si planowaniem nazywa si
dyspozytorem.
W tek wybrany przez dyspozytora b dzie wykonywany a do:
wywłaszczenia przez w tek
o wy szym priorytecie,
zako czenia, wyczerpania kwantu czasu lub u ycia w nim
blokuj cego wywołania systemowego (np. operacji WE/WY).
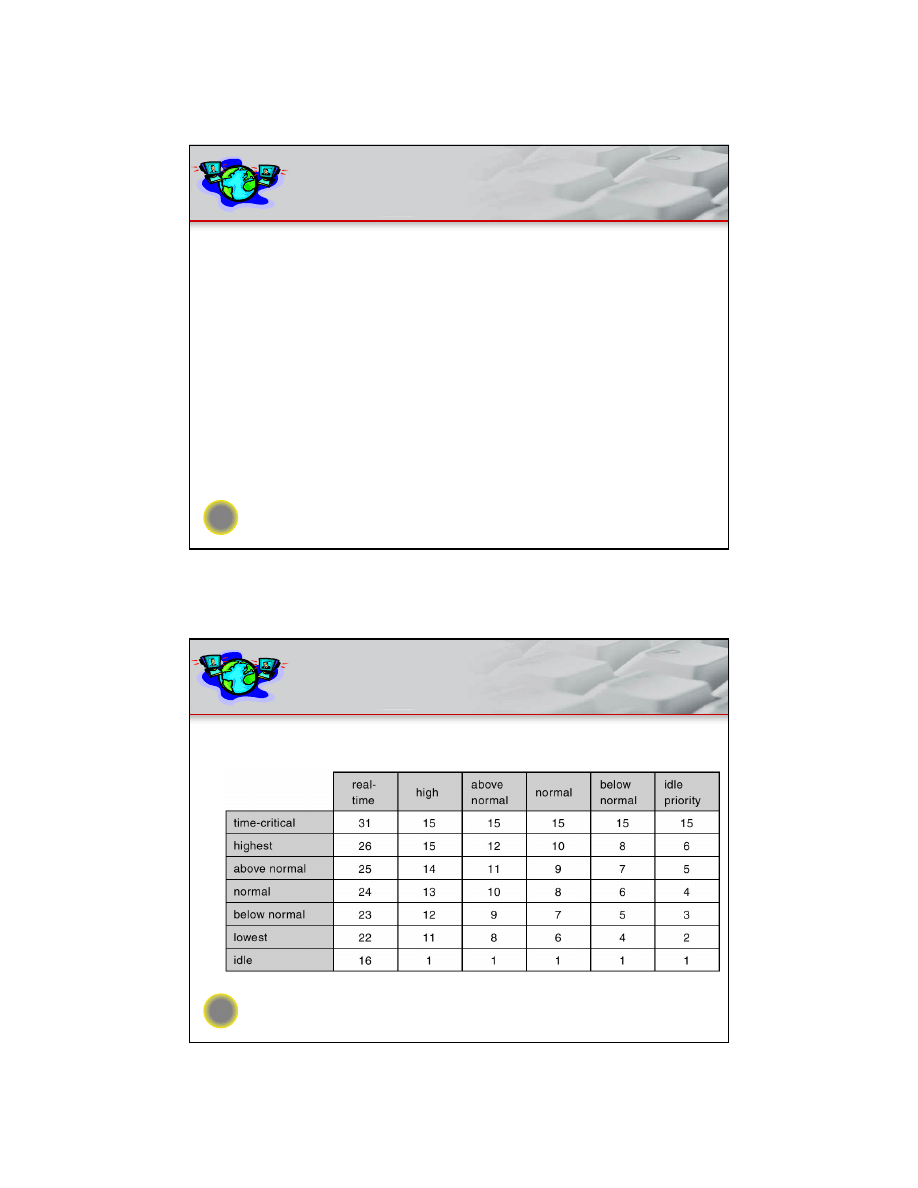
Priorytety podzielone s na dwie klasy:
Klasa zmienna - priorytety od 1 do 15; priorytet jest zmniejszany przy przerwaniu
czasomierza, a zwi kszany po zako czeniu czekania (np. na operacj WE/WY).
Klasa czasu rzeczywistego - priorytety od 16 do 31;
Istnieje te w tek z priorytetem 0, słu cy do zarz dzania pami ci .
Z ka dym priorytetem zwi zana jest kolejka w tków; je eli aden w tek nie jest gotowy, to
wykonywany jest w tek postojowy (idle thread).
Win32 API wyró nia 6 klas priorytetów, a w obr bie ka dej z klas okre la 7 priorytetów
wzgl dnych - s one odpowiednio powi zane z priorytetami liczbowymi j dra; ka da klasa
posiada odpowiedni priorytet podstawowy.
Ponadto Windows XP rozró nia proces pierwszoplanowy - aktualnie działaj cy na ekranie,
któremu zwi ksza kwant czasu (typowo 3-krotnie) i procesy drugoplanowe
w celu
polepszenia wydajno ci pracy interakcyjnej.
56
Priorytety w systemie MS Windows XP
Klasa priorytetu
Priorytety
wzgl dne
29
57
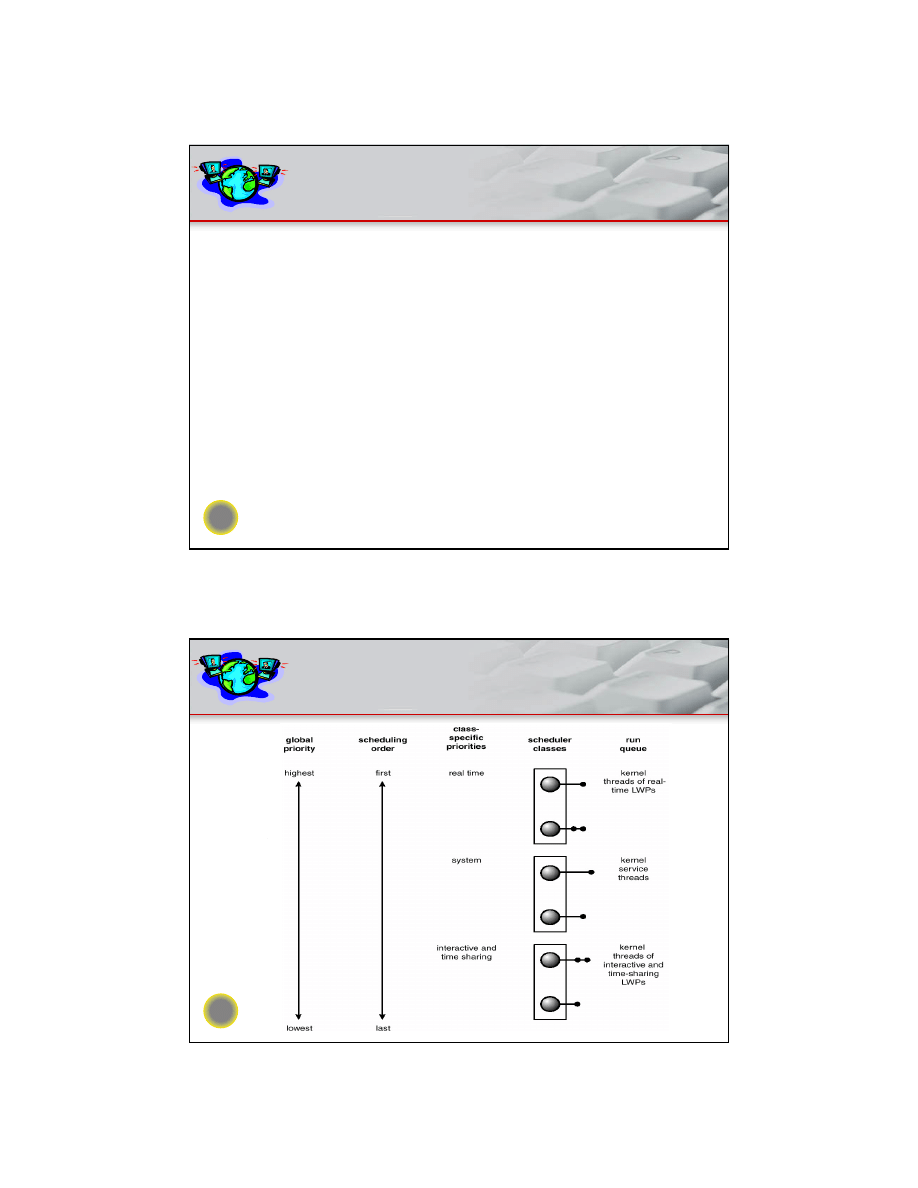
Planowanie procesów w systemie Solaris
Solaris stosuje
priorytetowe planowanie procesów - cztery klasy planowania:
Klasa czasu rzeczywistego;
Klasa systemowa;
Klasa interakcyjna;
Klasa podziału czasu.
W ka dej klasie s ró ne priorytety i ró ne algorytmy planowania.
Domy ln klas planowania procesu jest klasa podziału czasu.
W polityce planowania podziału czasu u ywane s wielopoziomowe kolejki ze
sprz eniem zwrotnym do dynamicznego zmieniania priorytetów oraz przydzielania
odcinków czasu o ró nych długo ciach (domy lnie: im wy szy priorytet, tym krótszy
odcinek czasu i odwrotnie).
Procesy interakcyjne maj z reguły wy szy priorytet, procesy ograniczone przez procesor
maj priorytet ni szy.
Taka polityka planowania daje dobry czas odpowiedzi procesów interakcyjnych i dobr
przepustowo dla procesów ograniczonych przez procesor.
Klasa systemowa słu y do wykonywania procesów j dra - priorytet takiego procesu
pozostaje niezmienny przez cały czas wykonywania.
W tki w klasie czasu rzeczywistego otrzymuj najwy szy priorytet - daje to gwarancj
uzyskania odpowiedzi w ograniczonym odst pie czasu (do tej klasy nale y na ogół
niewiele procesów).
58
Planowanie w systemie Solaris 2

30
DZI KUJ PA STWU
DZI KUJ PA STWU
Je li s pytania, to z
Je li s pytania, to z
przyjemno ci na nie
przyjemno ci na nie
odpowiemy
odpowiemy
Wyszukiwarka
Podobne podstrony:
Planowanie i przydział zasobów
T7 Planowanie i organizowanie procesu realizacji projektu ZP L2-14-1Z, od 2015, Projekt, Zarządzani
PLANOWANIE I PRZYDZIAŁ ZASOBÓW
wspolpraca nauczycieli w planowaniu i realizowaniu procesow edukacyjnych, organizacja-pracy
ALGORYTM WYZNACZANIA HARMONOGRAMU I PRZYDZIAŁU PROCESOR1041/5833
17 Planowanie procesów wytwarzania instrumentów
Macierz planowania procesu rekrutacyjnego na stanowisko
Korczak Informatyczne wspomaganie procesu planowania dostaw
zarz procesami planowanie, stud, I semsetr, WSTEP DO PROGRAMOWANIA, WDI
Proces planowania
do egzaminu, org. i zarządz., PLANOWANIE-proces definiowania celów oraz określania skutecznych środk
Planowanie procesu szkoleniowego i jego analiza
SO 2 PROCESY I WATKI
więcej podobnych podstron