Politechnika Opolska
Wydział Elektrotechniki, Automatyki i Informatyki
Instytut Automatyki i Informatyki
Przetworniki i Układy Pomiarowe
Laboratorium
Czujniki Indukcyjnościowe
Opole, 2007
Czujniki indukcyjno
ś
ciowe
Politechnika Opolska
Przetworniki i Układy Pomiarowe
- 2 -
Strona pusta
Czujniki indukcyjno
ś
ciowe
Politechnika Opolska
Przetworniki i Układy Pomiarowe
- 3 -
Przetworniki transformatorowe
1. Cel
ć
wiczenia
Celem
ć
wiczenia jest poznanie budowy, działania i charakterystyk statycznych przetwornika
transformatorowego.
2. Wprowadzenie teoretyczne [1]
Przetworniki magnetyczne stanowi
ą
ogromn
ą
grup
ę
przetworników, charakteryzuj
ą
cych si
ę
oddziaływaniem mechanicznej wielko
ś
ci na sprz
ęż
enie mi
ę
dzy strumieniem magnetycznym a
obwodem elektrycznym. Wyró
ż
ni
ć
tu mo
ż
na przetworniki bierne i czynne. Przetworniki bierne mog
ą
działa
ć
na zasadzie zmiany geometrii obwodu magnetycznego, elektrycznego lub ich wzajemnego
poło
ż
enia. Bezpo
ś
redni
ą
wielko
ś
ci
ą
wej
ś
ciow
ą
jest w takim przypadku przemieszczenie (poło
ż
enie,
wymiar, k
ą
t), które wpływa na indukcyjno
ść
własn
ą
L
(s
ą
to tzw. przetworniki indukcyjno
ś
ciowe) lub
wzajemn
ą
M
(przetworniki transformatorowe).
Podstawow
ą
cech
ą
ró
ż
ni
ą
c
ą
przetworniki transformatorowe od indukcyjno
ś
ciowych jest
zast
ą
pienie zale
ż
no
ś
ci
( )
x
f
L
=
zale
ż
no
ś
ci
ą
( )
x
f
M
=
. Wynika st
ą
d mo
ż
liwo
ść
odizolowania
obwodu zasilania od obwodu wyj
ś
ciowego oraz łatwo
ść
dopasowania impedancji. Najbardziej
rozpowszechniony i technicznie najwa
ż
niejszy układ przetwornika transformatorowego jest
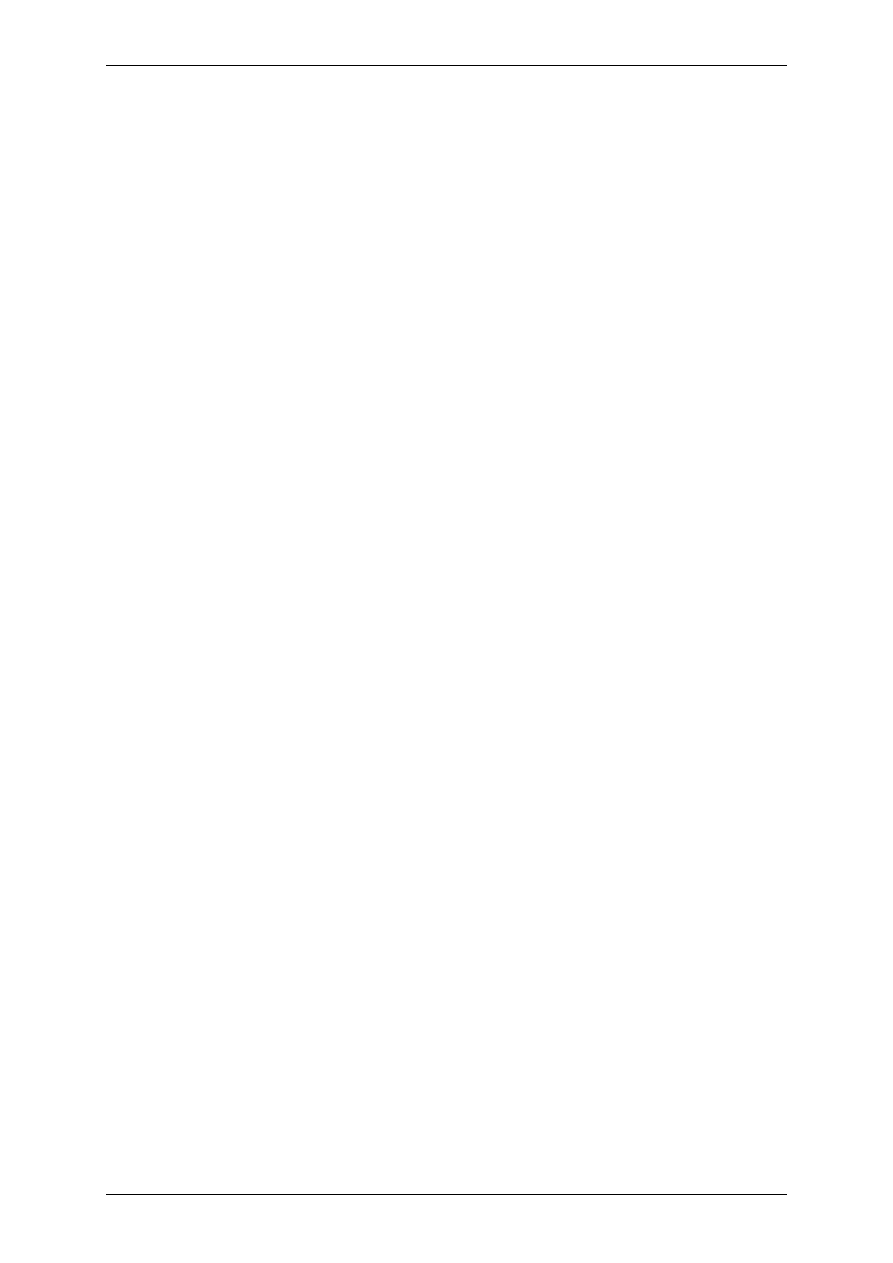
przetwornik z rdzeniem rurnikowym. Składa si
ę
on z uzwojenia pierwotnego 1 (rys. 2.1a) zasilanego
napi
ę
ciem
1
U
oraz z dwu przeciwsobnie poł
ą
czonych uzwoje
ń
wtórnych 2 i 3. Sprz
ęż
enie strumienia
pierwotnego z uzwojeniami wtórnymi jest funkcj
ą
wielko
ś
ci wej
ś
ciowej, a wi
ę
c przesuni
ę
cia
x
rdzenia
4 w stosunku do poło
ż
enia symetrycznego, przy którym napi
ę
cie wyj
ś
ciowe (dla idealnego
przetwornika)
0
2
=
U
. Napi
ę
cie
2
U
jest wi
ę
c funkcj
ą
x
, a przesuni
ę
cie fazy w stosunku do napi
ę
cia
zasilania przybiera warto
ś
ci
°
±
=
90
ϕ
, zale
ż
nie od kierunku przemieszczania rdzenia (rys. 2.1b). W
rzeczywisto
ś
ci na skutek istnienia w napi
ę
ciu wyj
ś
ciowym wy
ż
szych harmonicznych, głównie trzeciej
oraz składowej podstawowej przesuni
ę
tej w fazie o
°
90
, spowodowanej nieuniknion
ą
niesymetri
ą
przetwornika, nie osi
ą
ga si
ę
idealnego zera, a zmiana fazy nie jest skokowa (rys. 2.1c).
Rys. 2.1. Przetwornik transformatorowy ró
ż
nicowy:
a) przekrój przetwornika;
b) zale
ż
no
ś
ci idealne;
( )
;
2
x
f
U
=
( )
x
f
=
ϕ
;
c) zale
ż
no
ś
ci rzeczywiste;
1 – uzwojenie pierwotne; 2,3 – uzwojenie wtórne; 4 – rdze
ń
ferromagnetyczny
Ź
ródło: opracowano na podstawie [1]
Czujniki indukcyjno
ś
ciowe
Politechnika Opolska
Przetworniki i Układy Pomiarowe
- 4 -
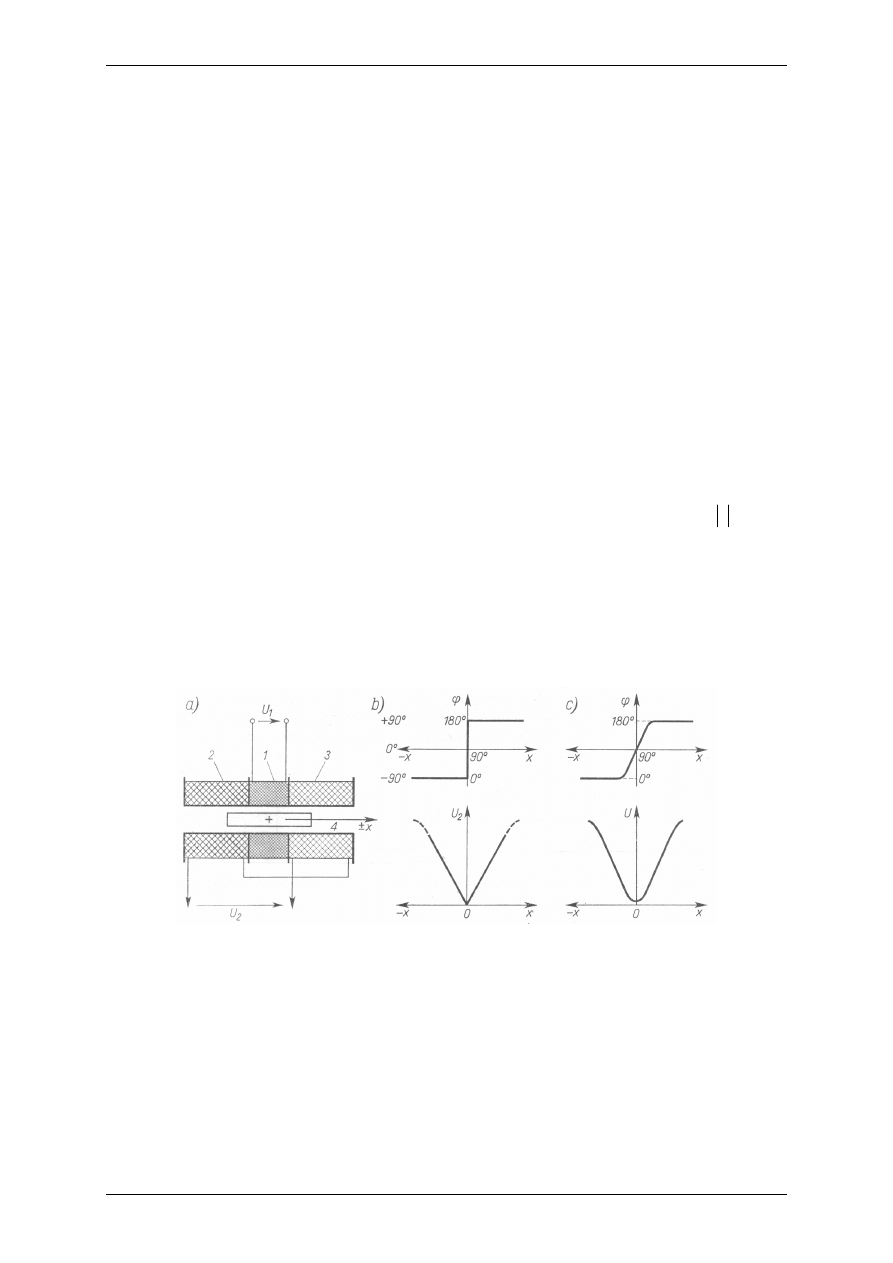
Rys. 2.2. Schemat elektryczny i sprz
ęż
e
ń
transformatorowego czujnika ró
ż
nicowego
Ź
ródło: opracowano na podstawie [1]
Zale
ż
no
ść
napi
ę
cia wyj
ś
ciowego od parametrów elektrycznych przetwornika (rys. 2.2) przedstawia
wzór:
(
)
(
)
(
)
(
)
[
]
2
2
1
2
1
2
2
3
3
2
1
3
3
2
2
1
1
1
2
1
2
1
R
R
R
M
M
M
L
L
L
j
M
L
L
R
R
L
M
M
U
U
−
−
−
−
+
+
−
+
+
−
=
ω
ω
ω
ω
(2.1)
W zakresie przemieszcze
ń
rdzenia, w którym zachowana jest liniowa zale
ż
no
ść
cx
M
M
=
−
1
2
, gdzie
c
oznacza stał
ą
, liniowo
ść
funkcji
( )
x
f
U
=
2
zale
ż
y wył
ą
cznie od mianownika prawej cz
ęś
ci wzoru
(2.1). Jak wida
ć
, główny wpływ ma opór obci
ąż
enia: dla
∞
→
2
R
zale
ż
no
ść
jest liniowa. W praktyce
uzyskuje si
ę
nieliniowo
ś
ci nawet poni
ż
ej
%
1
.
0
zakresu pomiarowego.
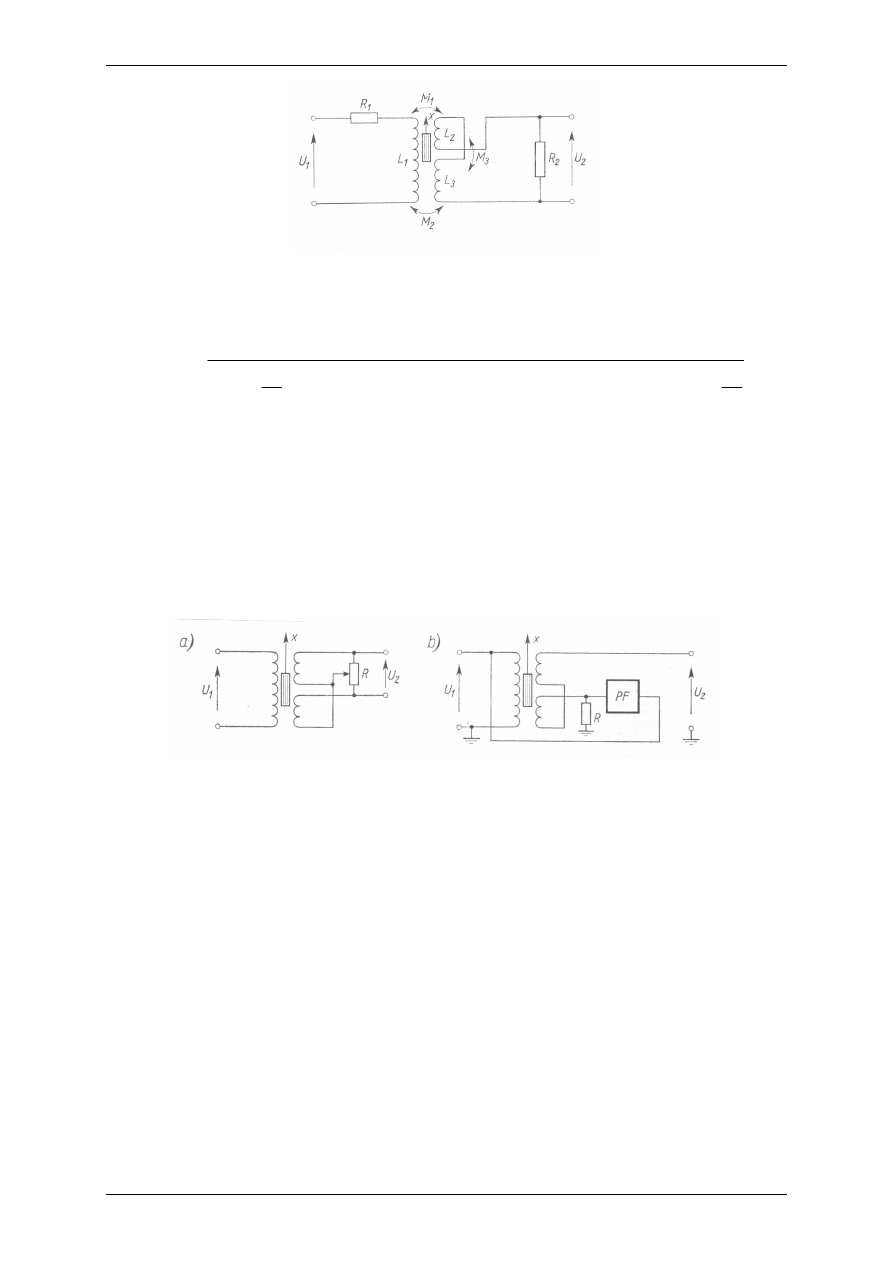
Zmniejszenie resztkowego napi
ę
cia zerowego mo
ż
na uzyska
ć
przez wyeliminowanie składowej
podstawowej przesuni
ę
tej w fazie o
°
90
drog
ą
niesymetrycznego obci
ąż
enia uzwoje
ń
wyj
ś
ciowych
(rys. 2.3a) oraz poprzez wprowadzenie ze strony pierwotnej napi
ę
cia w odpowiedniej fazie (rys. 2.3b),
które likwiduje udział trzeciej harmonicznej w momencie odpowiadaj
ą
cym zeru harmonicznej
podstawowej sygnału wyj
ś
ciowego.
Rys. 2.3. Układ do kompensacji składowych zera:
a) kompensacja składowej podstawowej;
b) kompensacja trzeciej harmonicznej;
PF – przesuwnik fazy
Ź
ródło: opracowano na podstawie [1]
Wpływ temperatury zale
ż
y od cz
ę
stotliwo
ś
ci napi
ę
cia zasilaj
ą
cego. Przy niskich cz
ę
stotliwo
ś
ciach (50
Hz) induktancja jest mała, przewa
ż
a rezystancja uzwojenia, zatem dla
const
U
=
1
wzrost
temperatury powoduje odpowiedni spadek pr
ą
du zasilania, a zatem i strumienia magnetycznego oraz
proporcjonaln
ą
zmian
ę
czuło
ś
ci. Wpływ ten maleje w miar
ę
wzrostu cz
ę
stotliwo
ś
ci. Przy pewnej
cz
ę
stotliwo
ś
ci, zale
ż
nie od parametrów przetwornika, wpływ temperatury osi
ą
ga minimum. Przez
zastosowanie po stronie zasilania oporu szeregowego, niezmiennego z temperatur
ą
, mo
ż
na ten
wpływ praktycznie całkiem wyeliminowa
ć
.
Wpływ zmian cz
ę
stotliwo
ś
ci na czuło
ść
przetwornika zale
ż
y od stosunku przyrostu strat do
przyrostu cz
ę
stotliwo
ś
ci, gdy oba przyrosty s
ą
sobie równe, mo
ż
na uzyska
ć
niezale
ż
no
ść
od zmian
cz
ę
stotliwo
ś
ci.
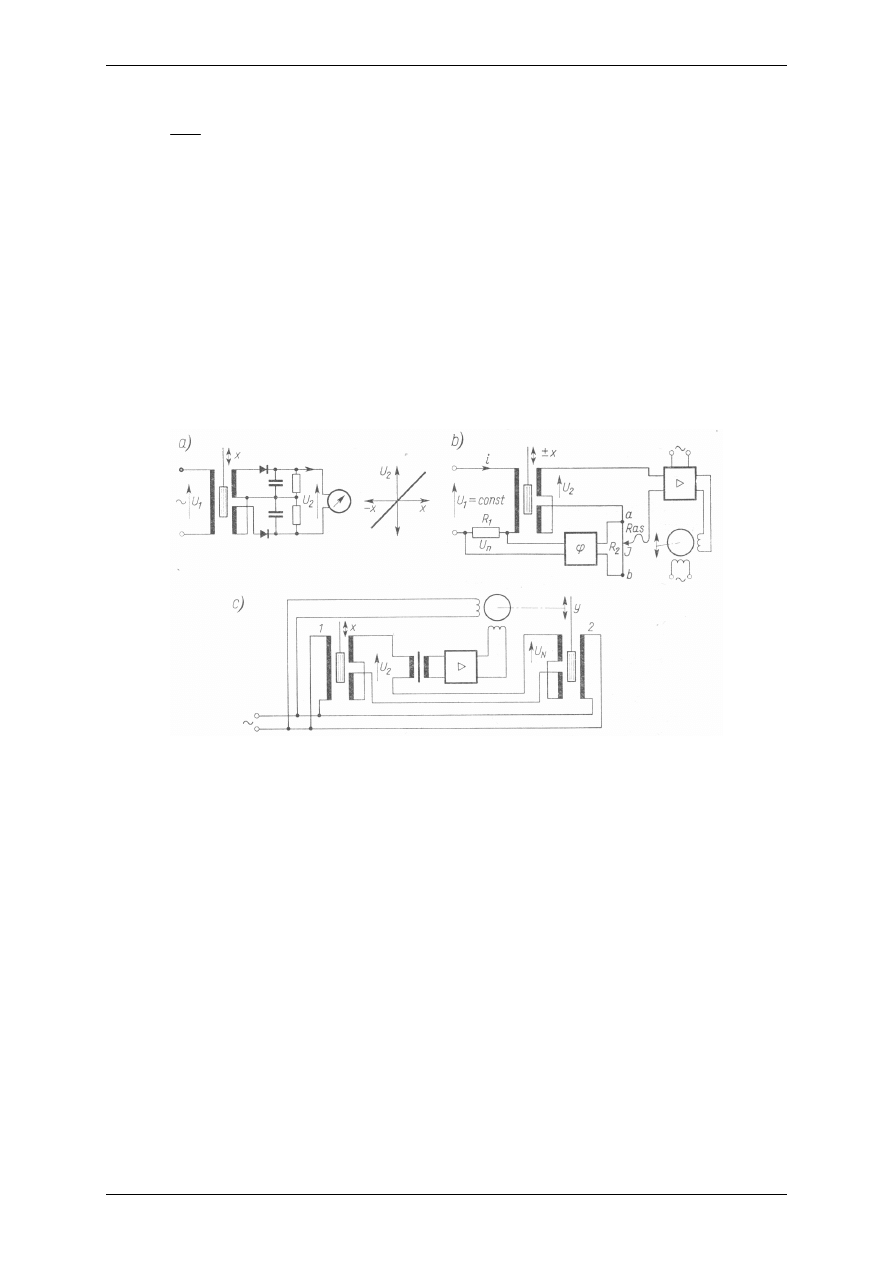
Układy pomiarowe mo
ż
na dobra
ć
odpowiednio do wymaganej dokładno
ś
ci i wła
ś
ciwo
ś
ci
dynamicznych. Układ z demodulatorem i wyj
ś
ciem pr
ą
du stałego, przedstawiony na rys. 4a,
obarczony jest stosunkowo du
ż
ymi bł
ę
dami, natomiast przenoszona cz
ę
stotliwo
ść
ograniczona jest
praktycznie tylko wła
ś
ciwo
ś
ciami mechanicznymi układu wej
ś
ciowego oraz zastosowan
ą
cz
ę
stotliwo
ś
ci
ą
no
ś
n
ą
. W tego rodzaju układzie potrzebny jest cz
ę
sto wzmacniacz.
Na rys. 4b i c przedstawione s
ą
układy zerowe, astatyczne. Działanie pierwszego z nich polega na
kompensacji po stronie wyj
ś
ciowej: napi
ę
cie
2
U
kompensuje si
ę
napi
ę
ciem
n
U
, proporcjonalnym do
Czujniki indukcyjno
ś
ciowe
Politechnika Opolska
Przetworniki i Układy Pomiarowe
- 5 -
pr
ą
du
i
, zasilaj
ą
cego uzwojenie pierwotne przetwornika. Jak wida
ć
z rys. 4b,
1
iR
U
n
=
oraz
2
2
R
Ras
U
U
n
=
. Układ ten jest niezale
ż
ny od zmian napi
ę
cia zasilania, a zast
ą
pienie miliamperomierza
układem
ś
ledz
ą
cym zapewnia wy
ż
sz
ą
dokładno
ść
.
Działanie drugiego układu polega na kompensacji napi
ę
cia wyj
ś
ciowego
2
U
napi
ę
ciem
n
U
z
przetwornika identycznego z wyj
ś
ciowym, którego rdze
ń
przedstawia astatyczny układ
ś
ledz
ą
cy.
Zatem wielko
ś
ci
ą
wyj
ś
ciow
ą
jest poło
ż
enie rdzenia w przetworniku kompensacyjnym 2 (rys. 2.4c),
odczytywane na odpowiedniej podzielni. Układ ten eliminuje praktycznie wszystkie bł
ę
dy
przetwarzania. Wad
ą
obydwu układów jest jednak powolno
ść
działania i koszt.
Uzyskiwane czuło
ś
ci zale
żą
w du
ż
ym stopniu od konstrukcji. Osłona wykonana np. z materiału
ferromagnetycznego znacznie zwi
ę
ksza czuło
ść
i zmniejsza wpływ pól rozproszonych oraz
s
ą
siaduj
ą
cych mas metalowych. Uzyskuje si
ę
czuło
ść
500 mV/1 mm przesuni
ę
cia. Przy zastosowaniu
materiału magnetycznego o małej stratno
ś
ci (ferryty magnetycznie mi
ę
kkie) mo
ż
na stosowa
ć
cz
ę
stotliwo
ś
ci no
ś
ne do około 20 kHz, co pozwala na
ś
ledzenie szybkich zjawisk. Zakres mierzalnych
przesuni
ęć
si
ę
ga setek milimetrów. Granica dolna ograniczona jest wspomnianym ju
ż
brakiem
idealnego zera oraz szumami, głownie wzmacniacza i szumami magnetycznymi. Przy starannym
dobraniu elementów szumy mo
ż
na ograniczy
ć
do warto
ś
ci odpowiadaj
ą
cej ułamkowi µm.
Rys. 2.4. Układy pomiarowe ró
ż
nicowych przetworników transformatorowych;
a) z demodulatorem;
b) zerowy z kompensacj
ą
po stronie elektrycznej;
Ź
ródło: opracowano na podstawie [1]
3. Program
ć
wiczenia
Celem
ć
wiczenia jest wyznaczenie charakterystyki statycznej czujnika. Poł
ą
czy
ć
układ pomiarowy
jak pokazano na rys. 2.2. Przed przyst
ą
pieniem do pomiarów zapozna
ć
si
ę
z budow
ą
czujnika.
Literatura
[1] Edmund Romer:
Miernictwo przemysłowe
, PWN, Warszawa 1978, [str. 154÷161]
Wyszukiwarka
Podobne podstrony:
CZUJNIKI, Czujniki indukcyjne dane
Badanie czujnika indukcyjnego, Czujnik indukcyjny, Kaczor Rafał
Czujniki indukc
Badanie czujnika indukcyjnego, czujnik indukcy, POLITECHNIKA RADOMSKA
Badanie czujnika indukcyjnego i hala
CZUJNIKI, Czujniki indukcyjne dane
as czujniki indukcyjne
Czujniki indukcyjne
RIKO PS0801 NP karta katalogowa czujnik indukcyjny
Badanie indukcyjnych i pojemnościowych czujników zbliżeniowych, MECHATRONIKA, IV Semestr, Mikronapęd
Czujniki zbliżeniowe indukcyjne
2004 01 Indukcyjny czujnik zbliżeniowy
przetworniki indukcyjne
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
wyk12 Indukcja
Wyklad 7b Zjawisko indukcji magnetycznej
02 czujniki, systematyka, zastosowania
więcej podobnych podstron