
Inżynieria Środowiska
2008/09 sem. zimowy
Wykład 2
09 10 2008
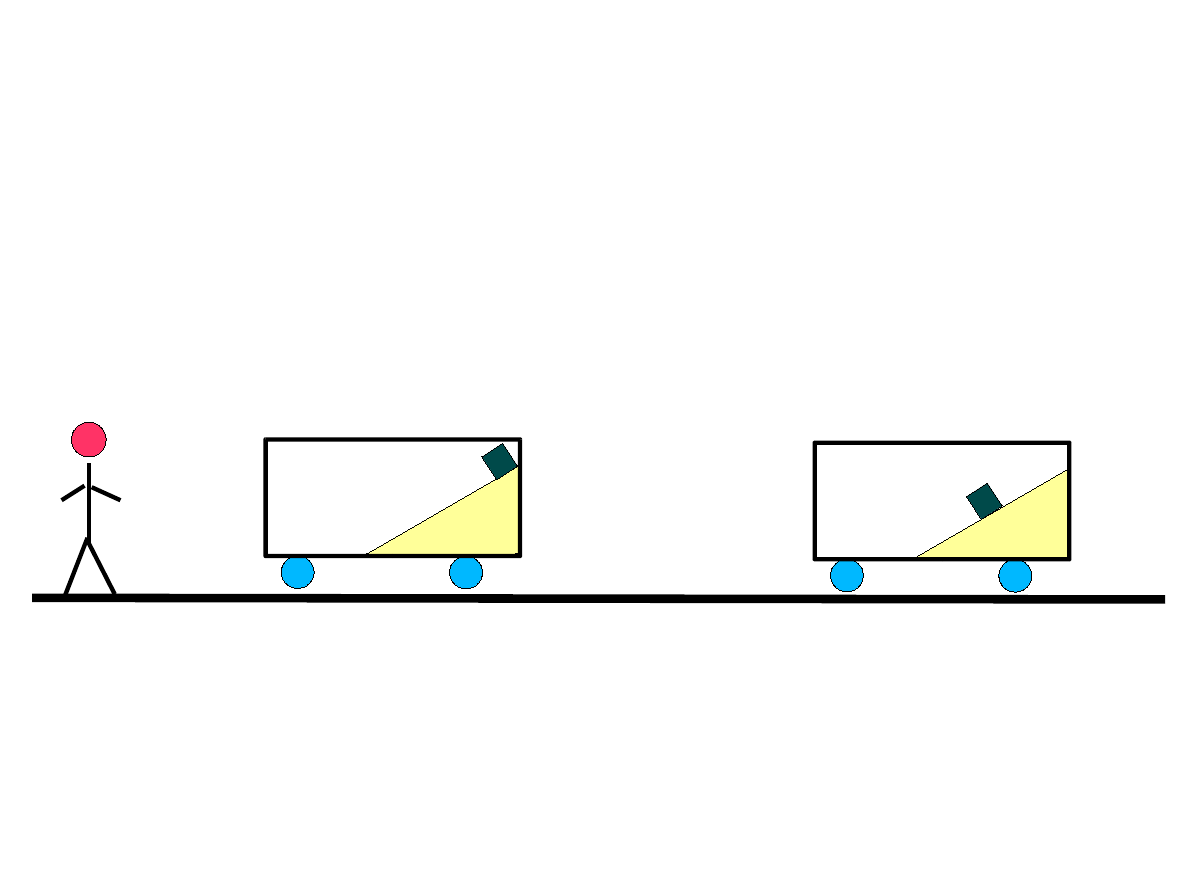
obserwator A
obserwator B
obiekt obserwowany
obserwator A
I chwila
II chwila
A
A
B
B
obserwator B
I chwila
II chwila
B
B
obiekt obserwowany
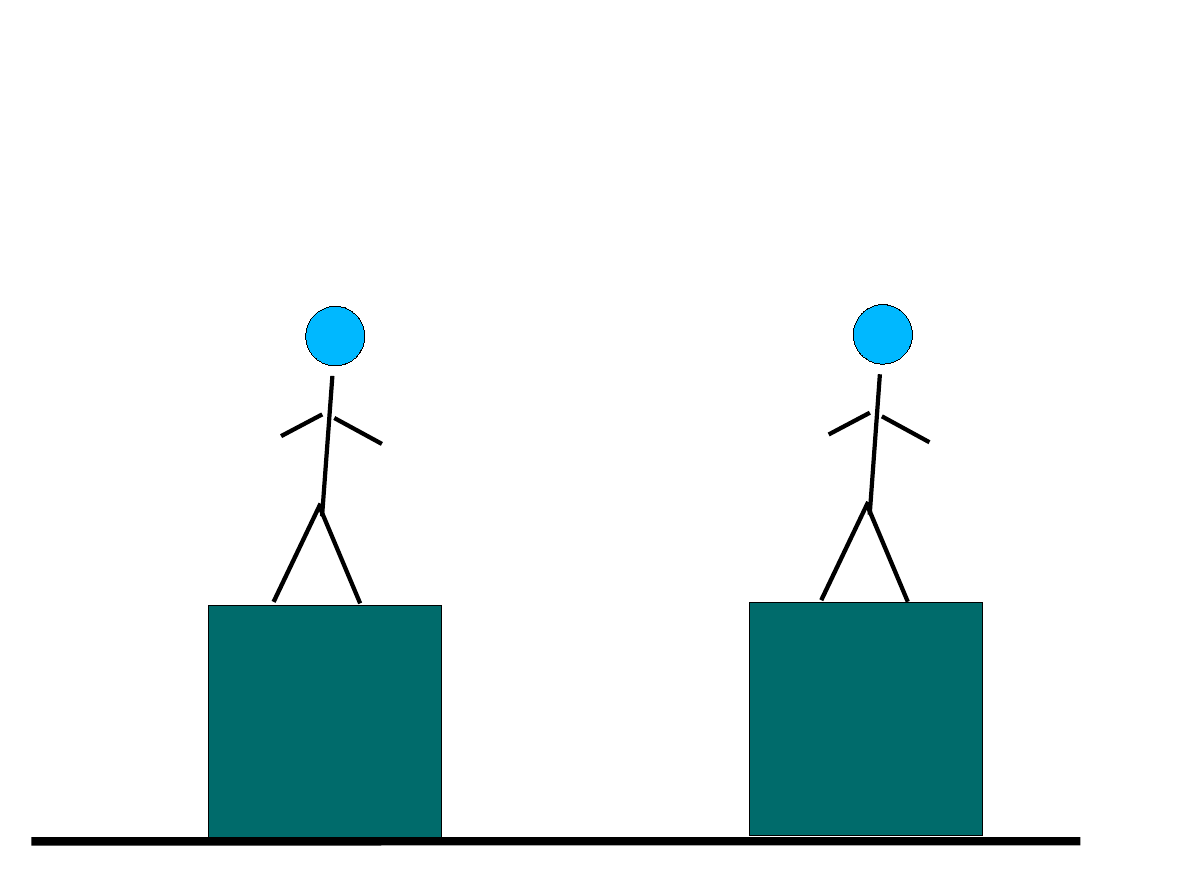
Obserwator A
„związany z ziemią”
A
I chwila
II chwila
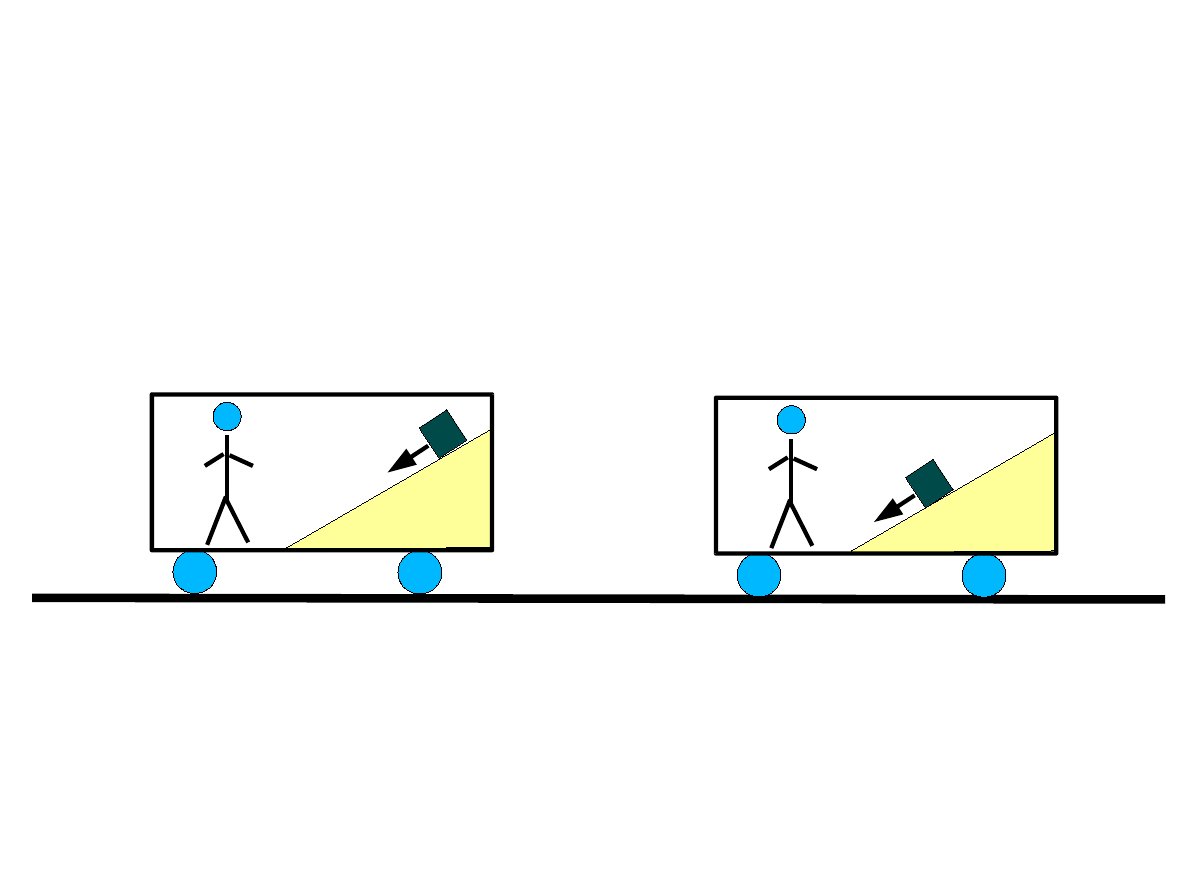
Obserwator B
„związany z wózkiem”
B
B
I chwila
II chwila
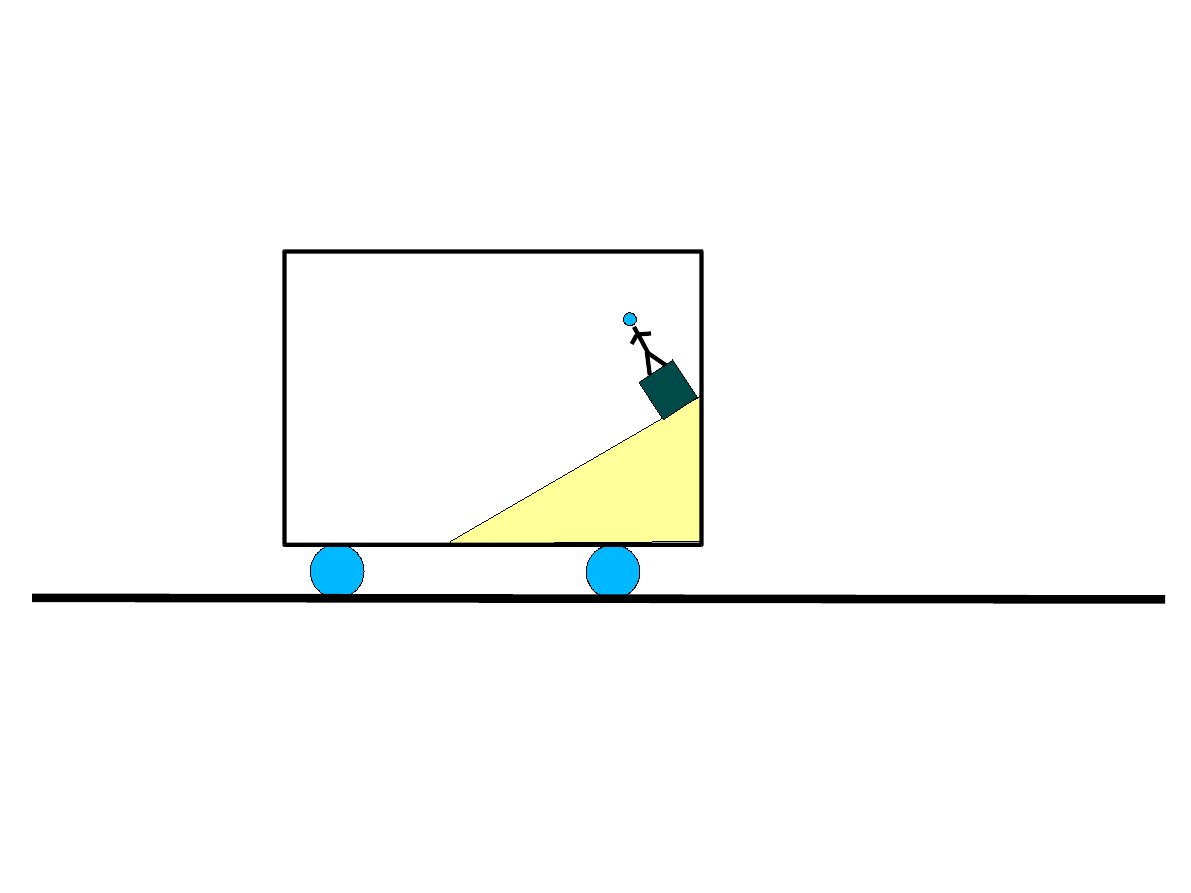
Obserwator C
„związany z klockiem”
C
C
C
I chwila
II chwila
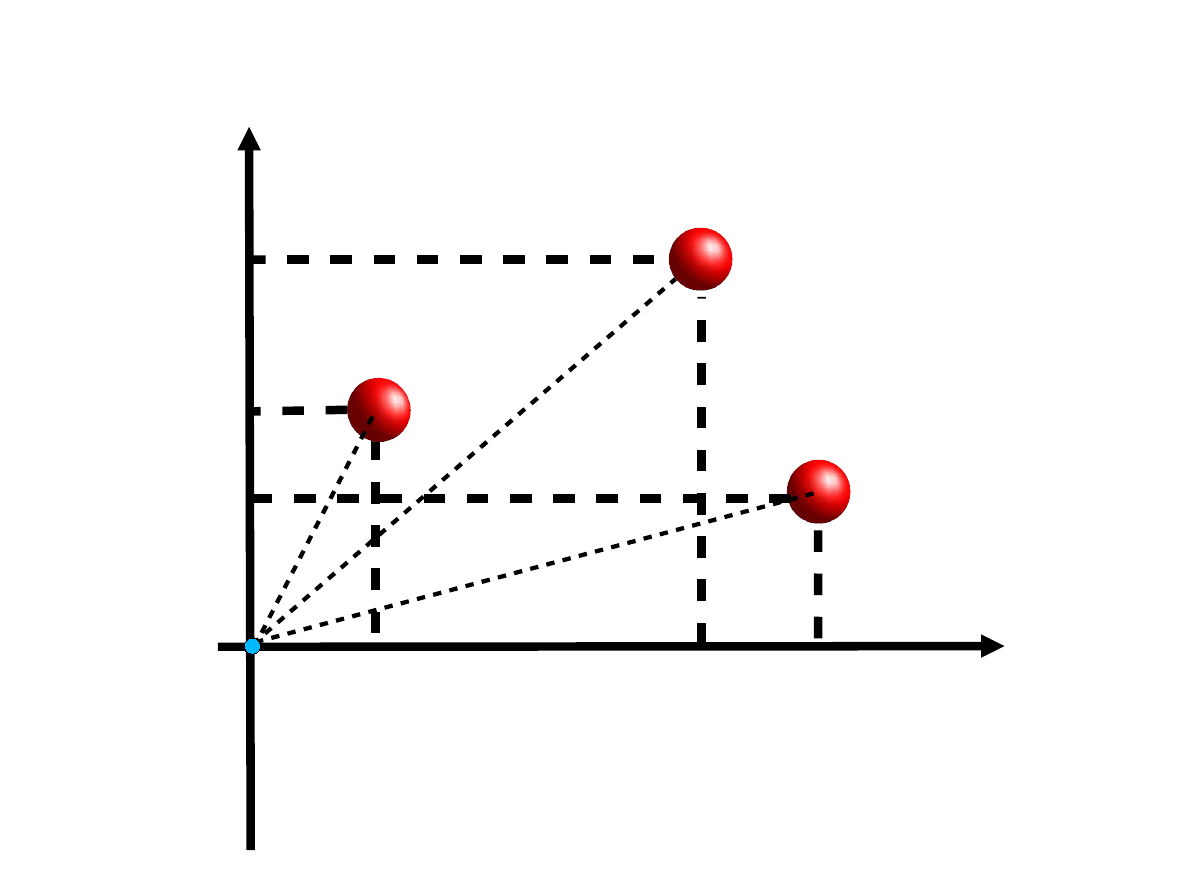
x
1
y
1
Y
X
y
2
x
2
x
3
y
3
X
Y
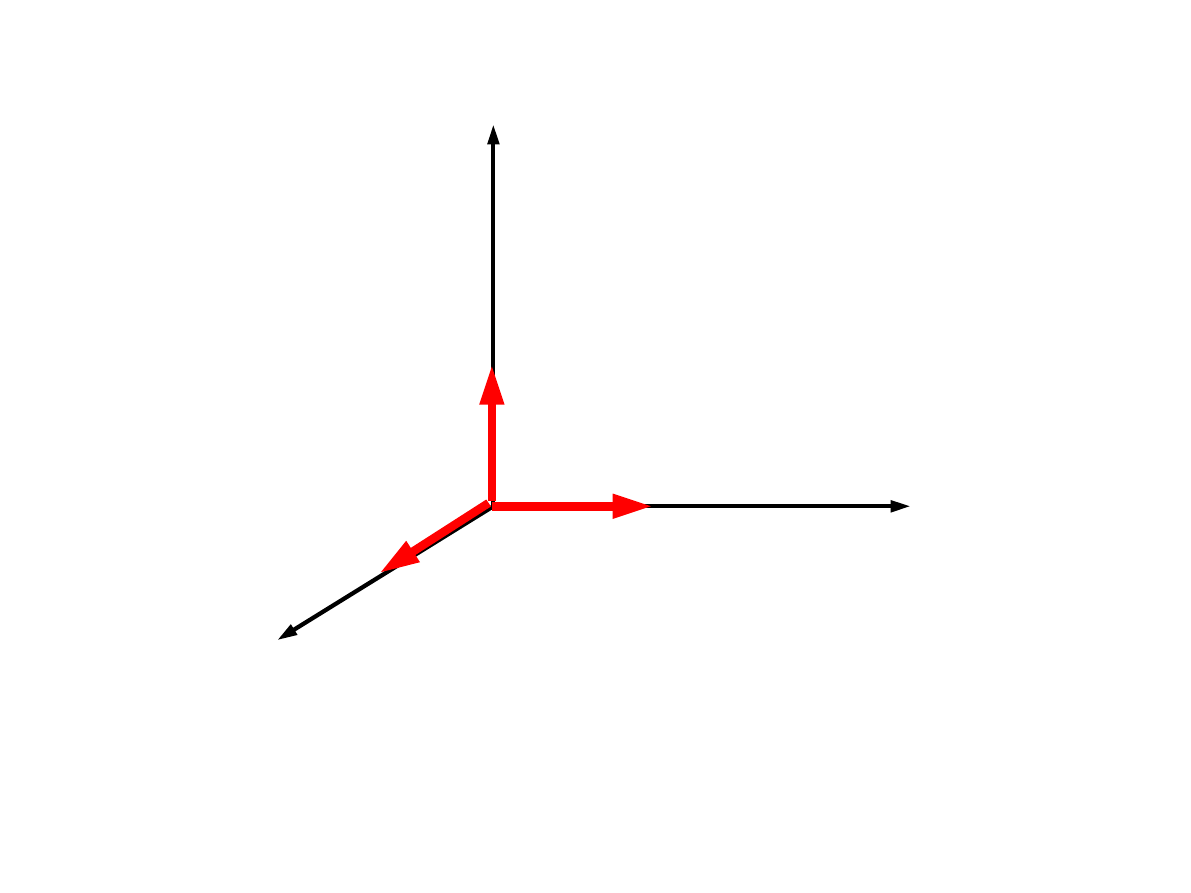
Z
i
k
j
X
Y
Z
i
k
j
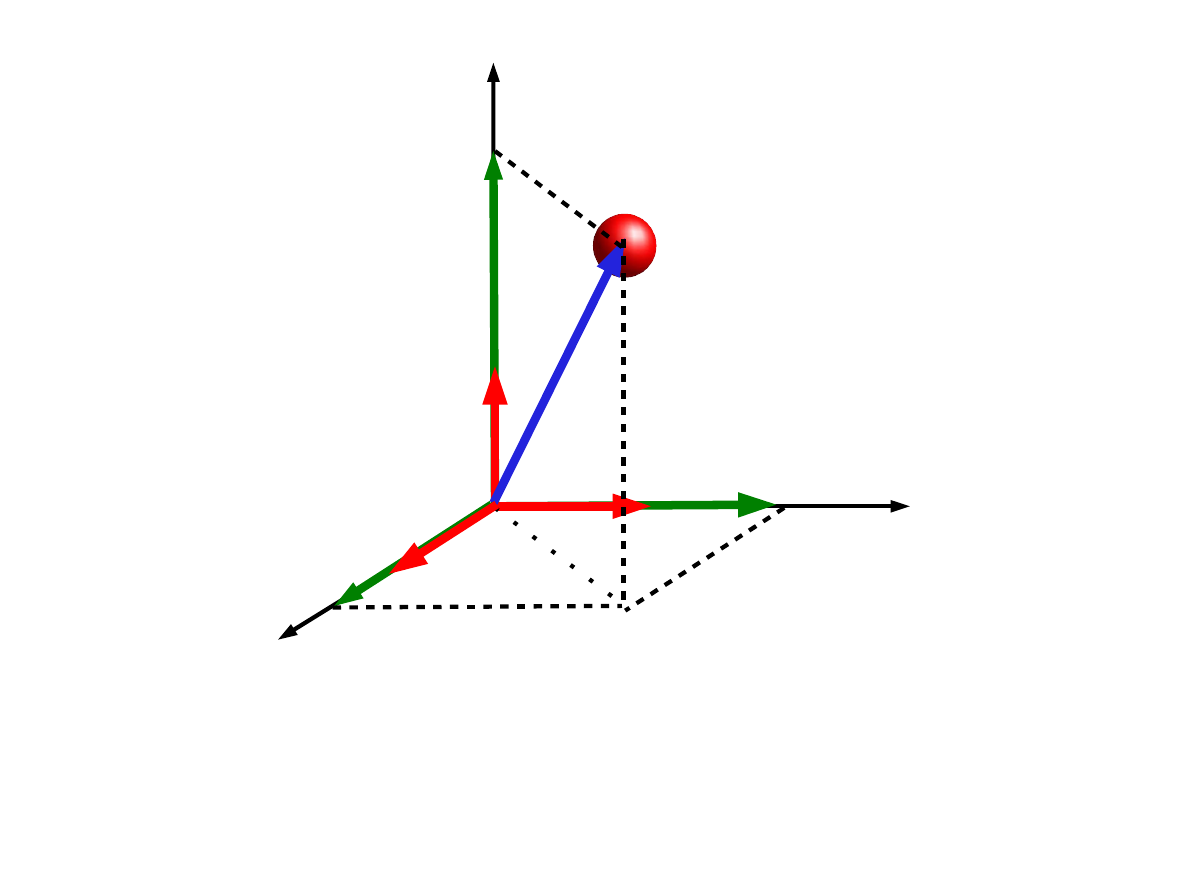
y
z
x
r
r =
r
x
r
y
r
z
=
x i y jz k
X
Y
X
g
h
g∥h
x≠const
y≠const
X
Y
X
g
h
g∥h
x≠const
y=const
X
Y
X
g
h
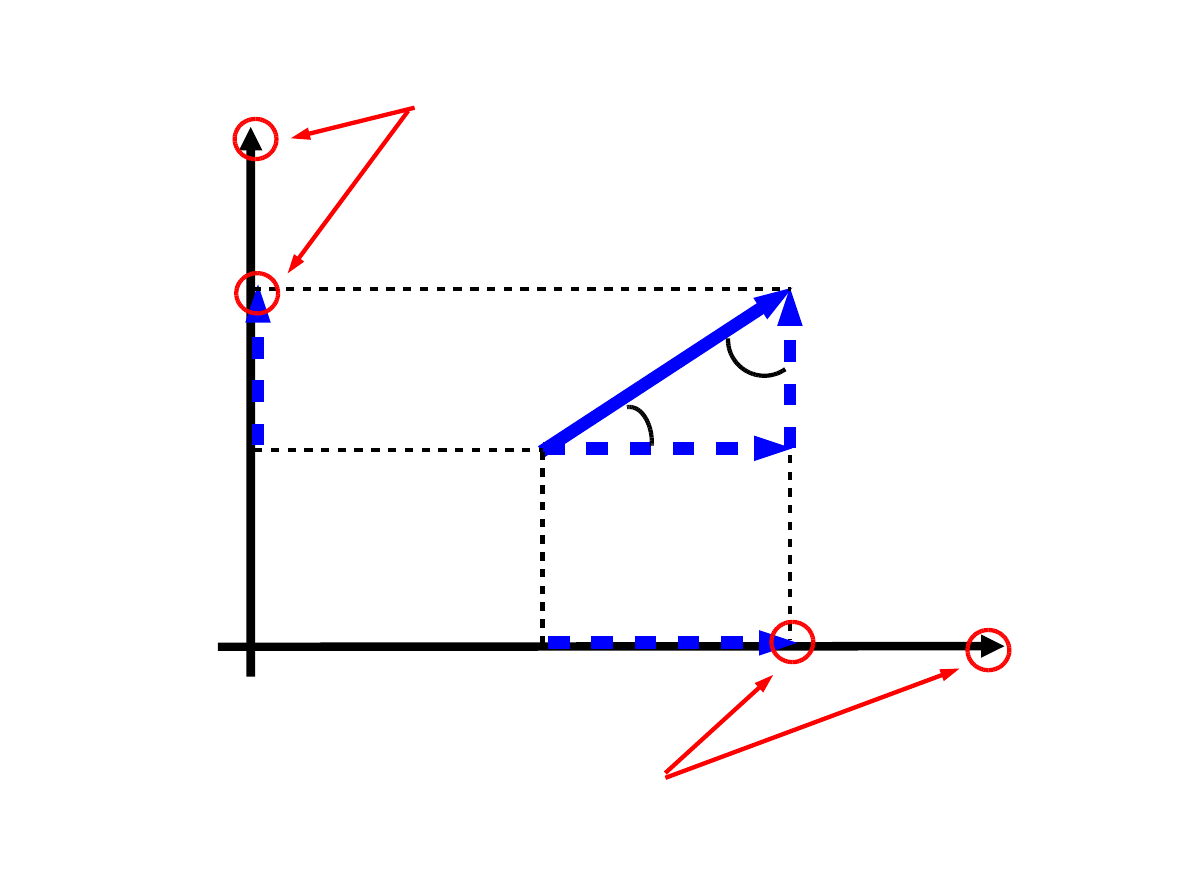
X
Y
A
A
x
A
y
A
x
0
A
x
0
A
y
0
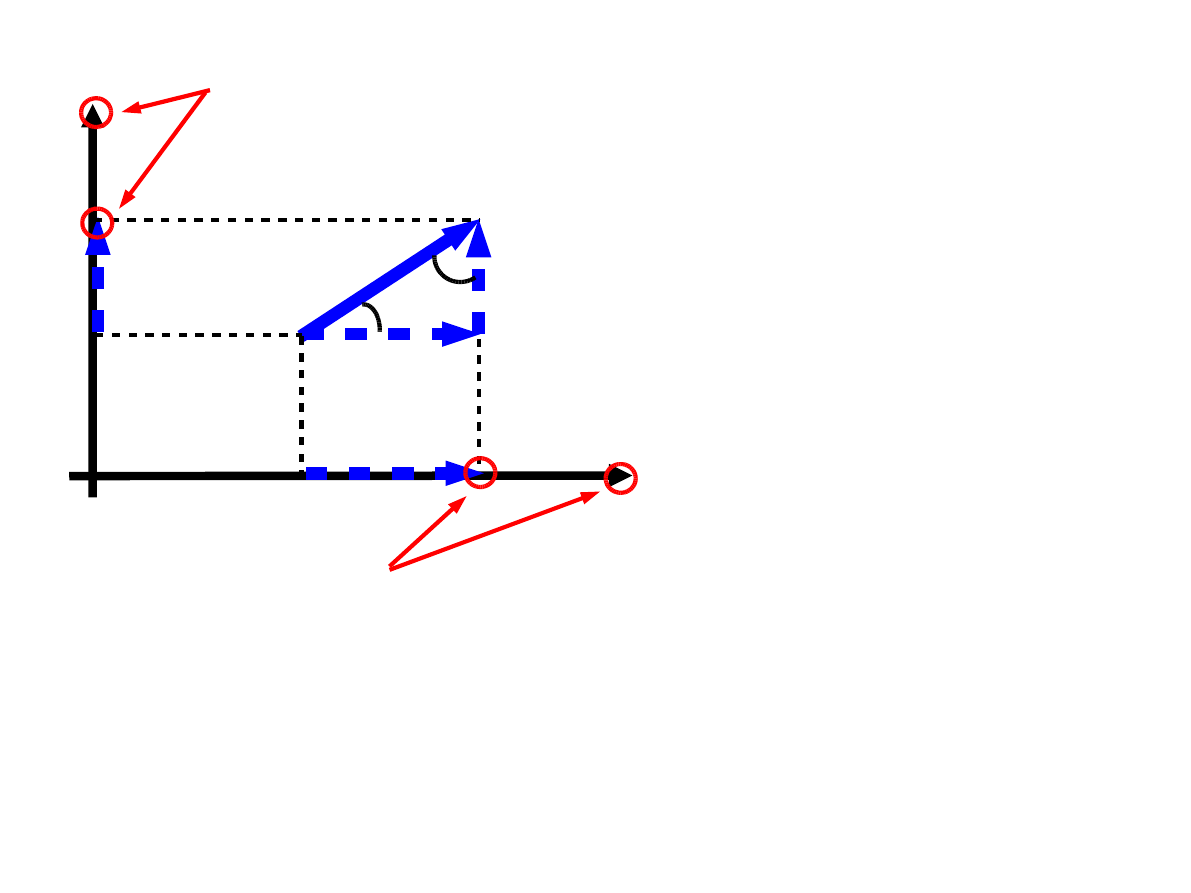
X
Y
A
A
x
A
y
A
x
0
A
x
0
A
y
0
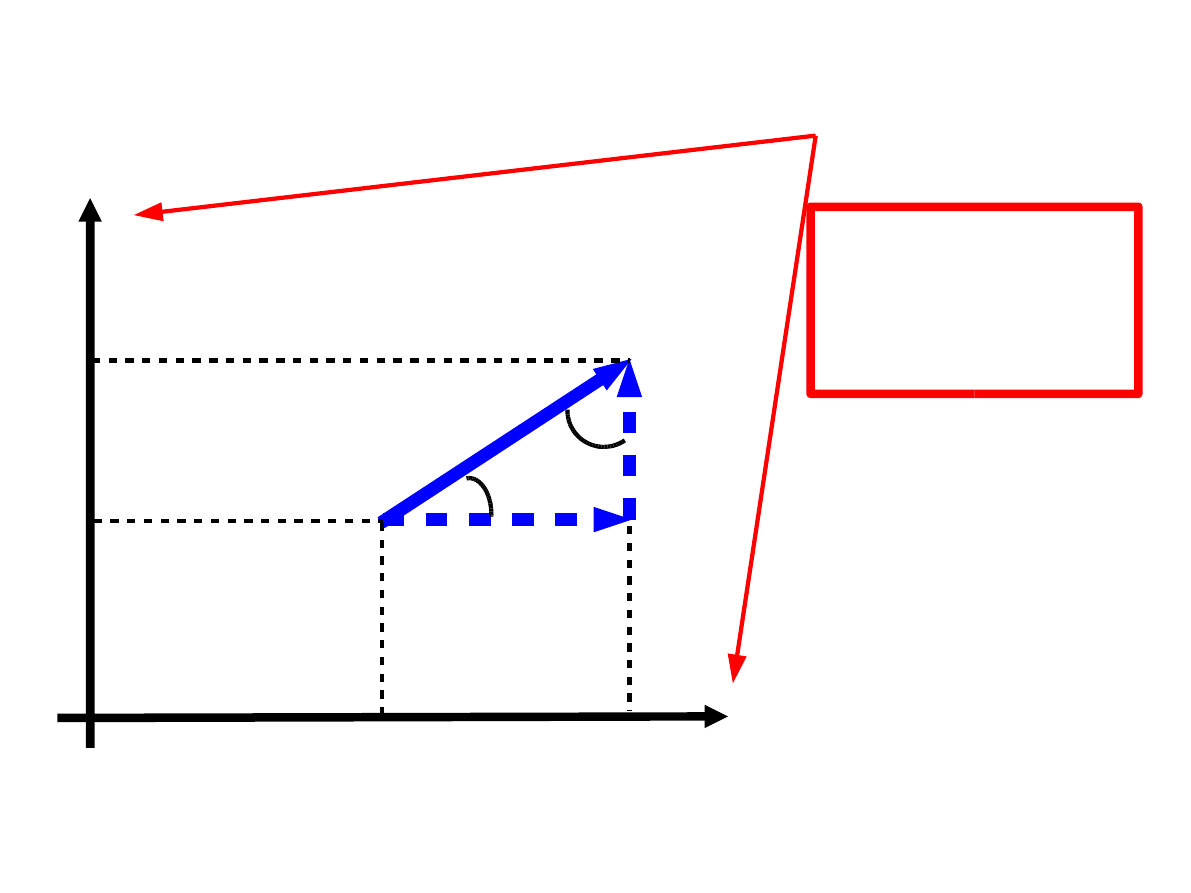
A
x
=
A cos
A
y
=
Asin
A
y
=
A cos
A
x
=
Asin
A
x
=
Asin = Asin 90 − = A cos
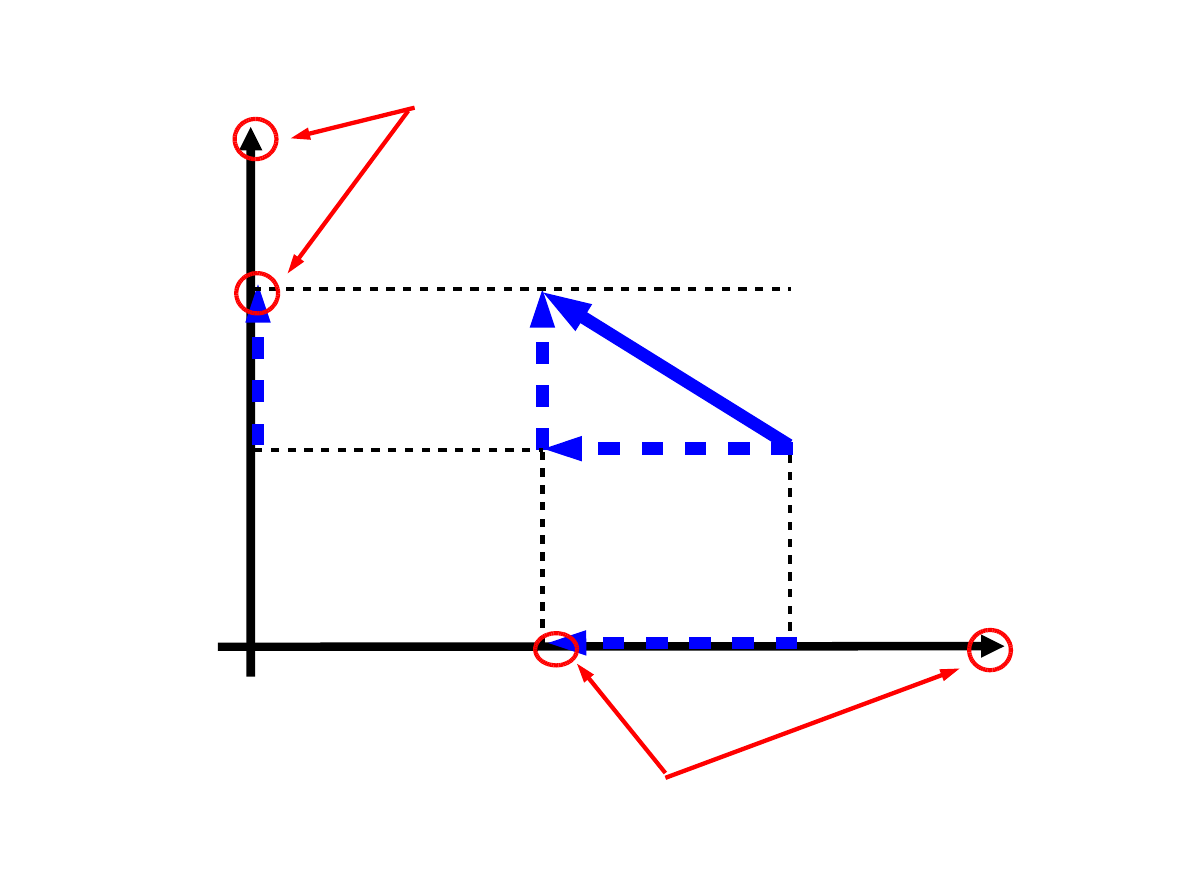
A
A
x
0
A
x
=
A cos
A
y
=
Asin
ŹLE!!!!!!
?
?
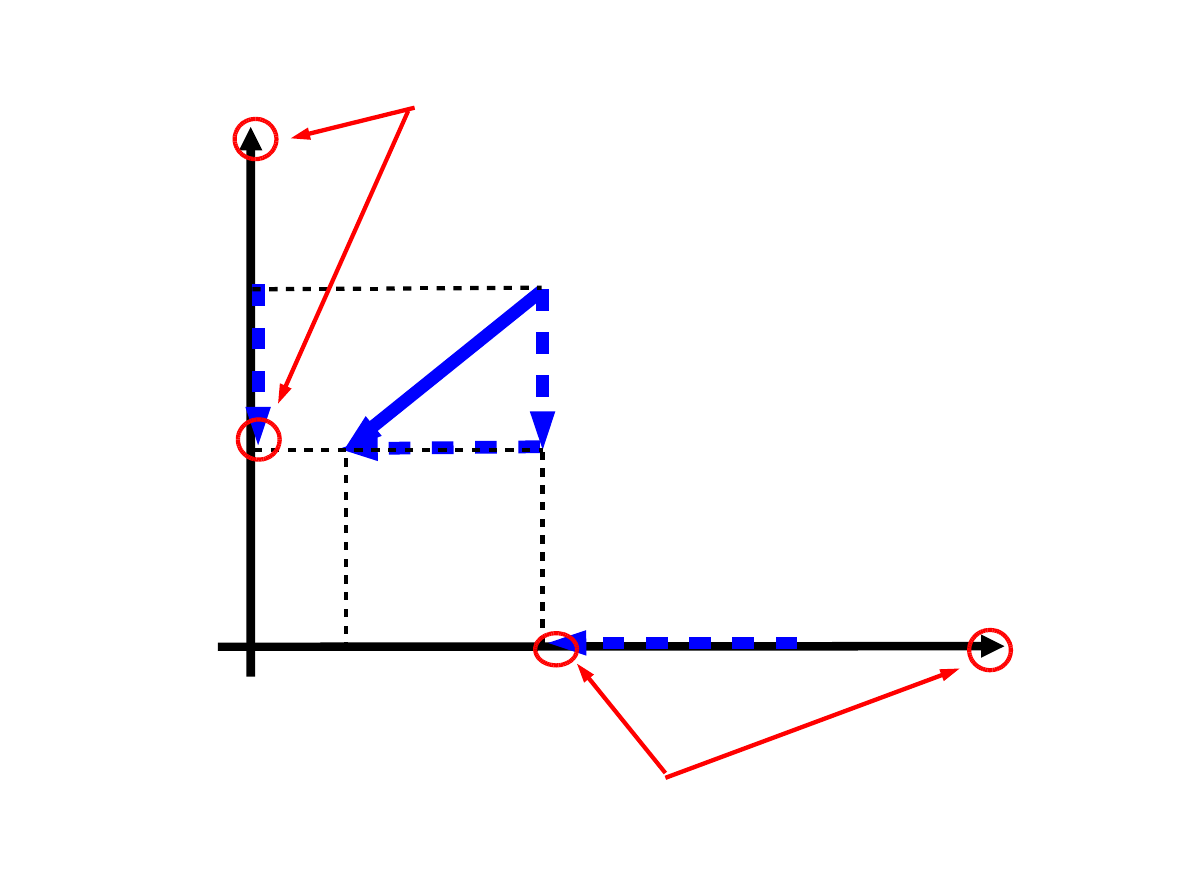
X
Y
A
A
x
A
y
A
x
0
A
x
0
A
y
0
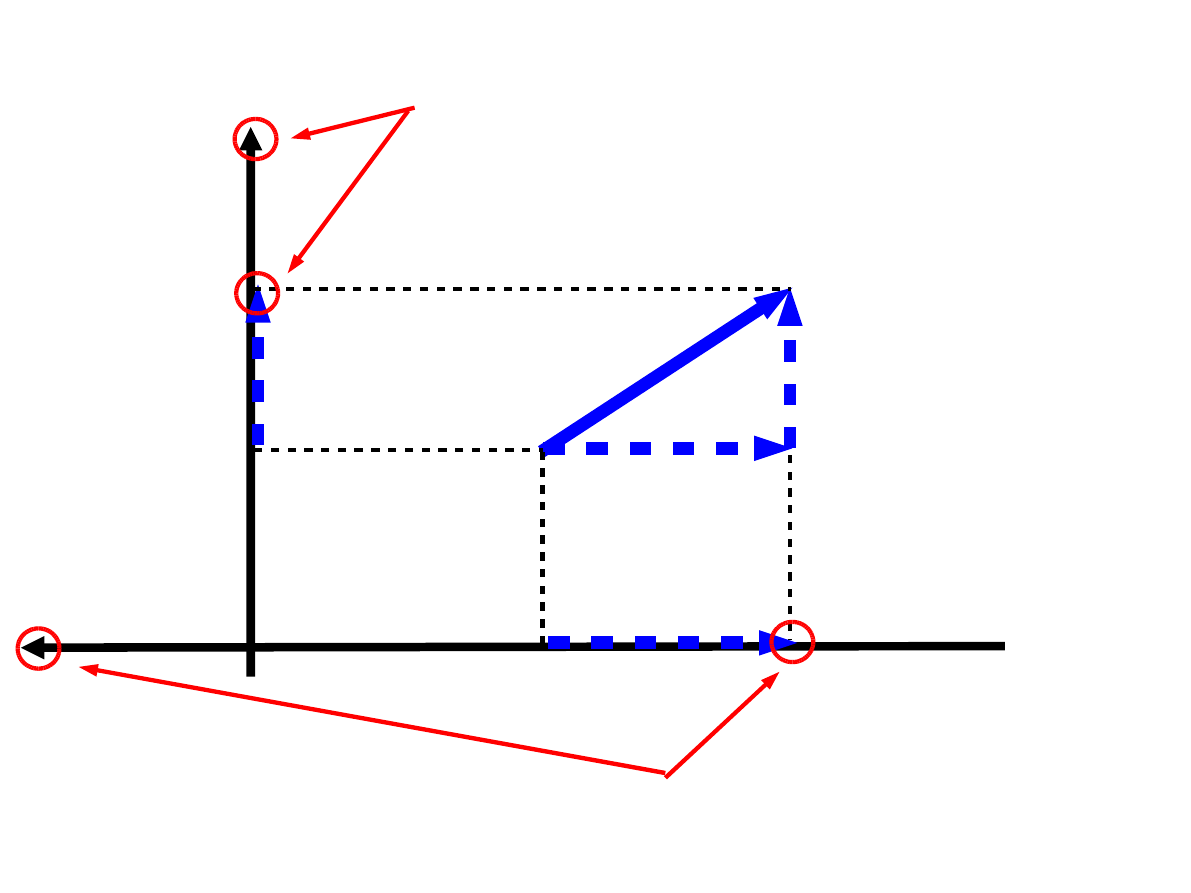
X
Y
A
A
x
A
y
A
x
0
A
x
0
A
y
0
X
Y
A
A
x
A
y
A
x
0
A
x
0
A
y
0
X
Y
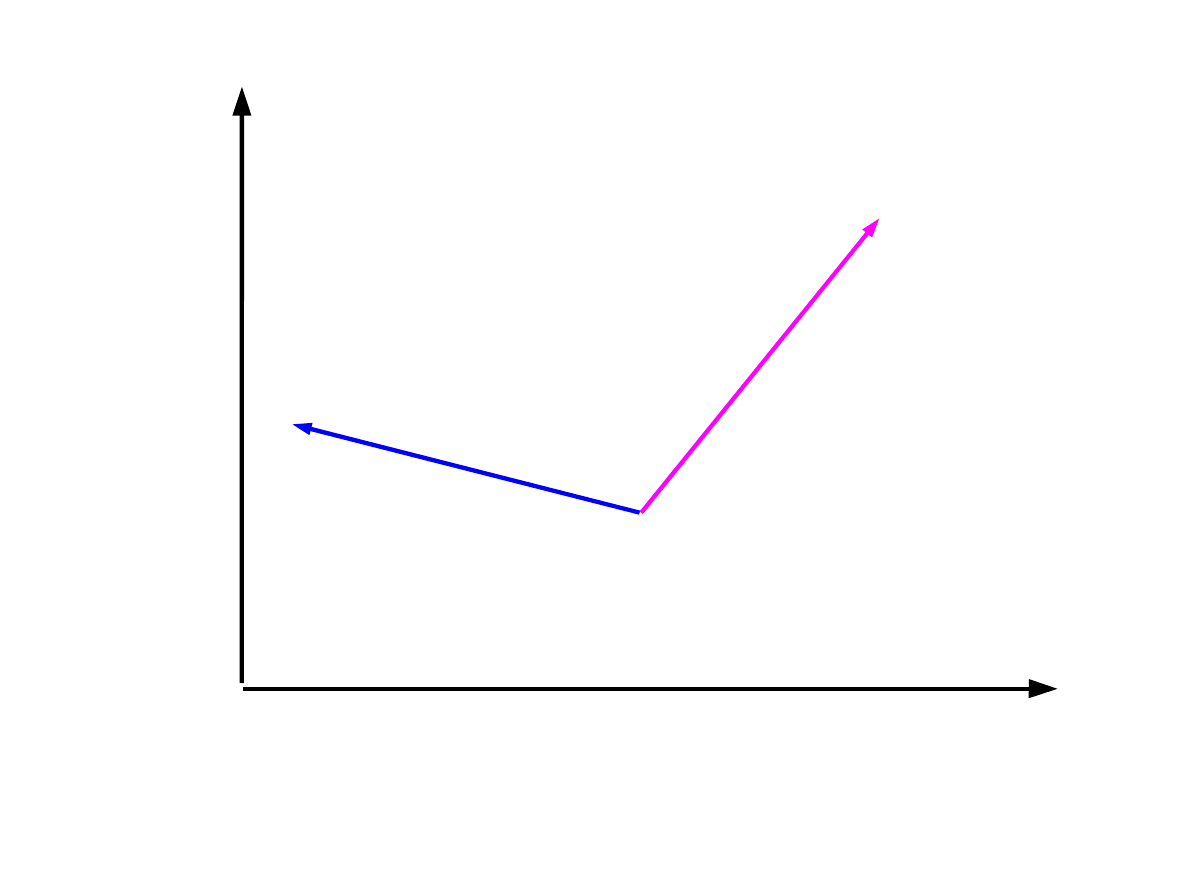
a
b
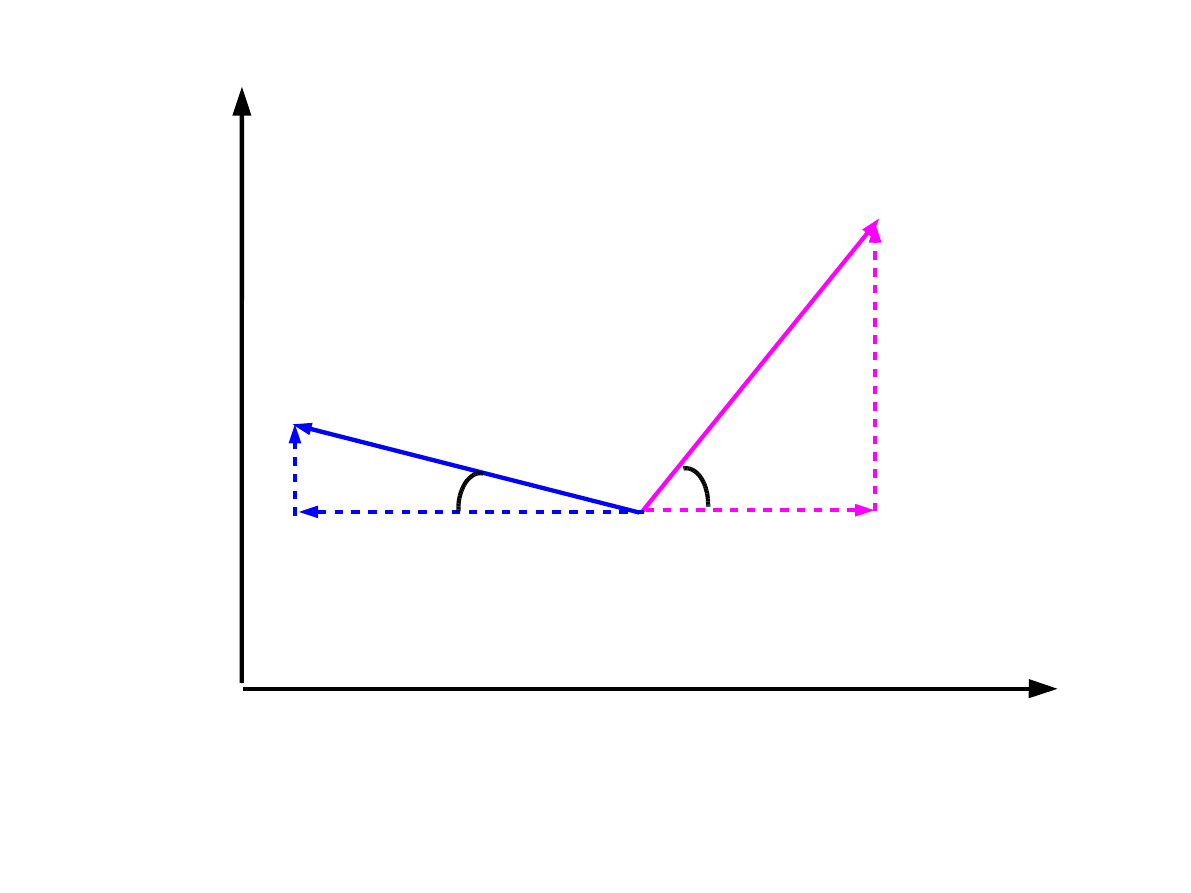
X
Y
a
b
a
x
a
y
b
x
b
y
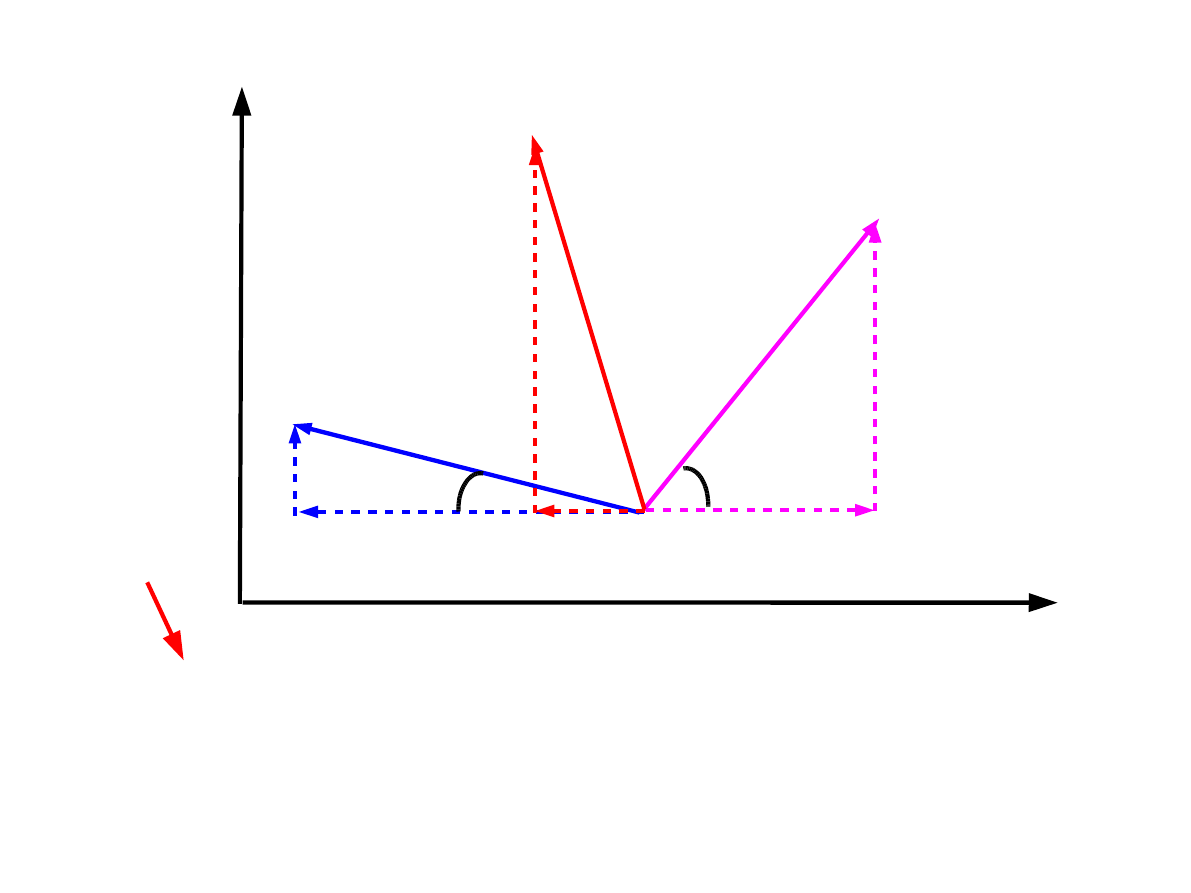
X
Y
a
b
a
x
a
y
b
x
b
y
c = ab
c
x
c
y
c
x
=−
a
x
b
x
= −
a cos b cos
c
y
=
a
y
b
y
=
a sin b sin
!
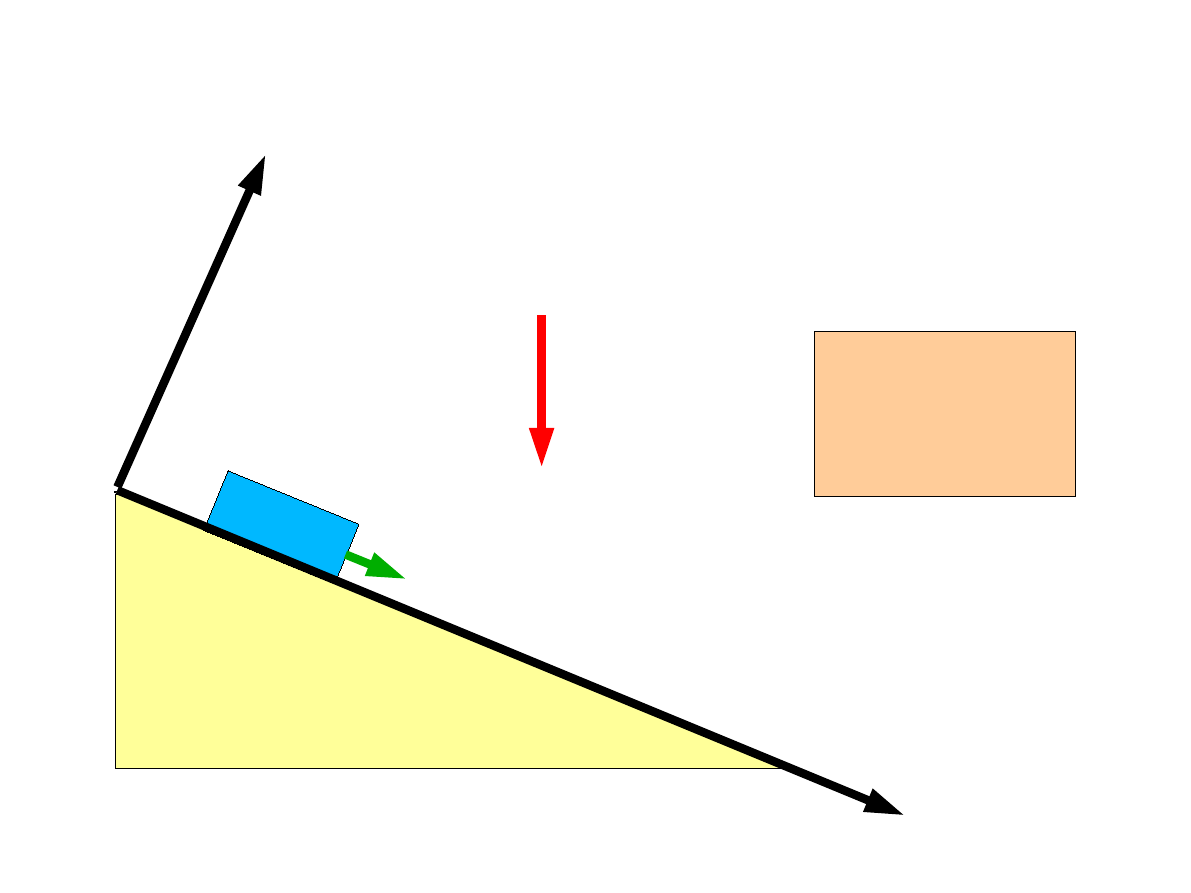
I zasada dynamiki
Każde ciało trwa w stanie w spoczynku
lub w ruchu jednostajnym prostoliniowym
dotąd, aż działające na niego siły
nie zmuszą go do zmiany tego stanu

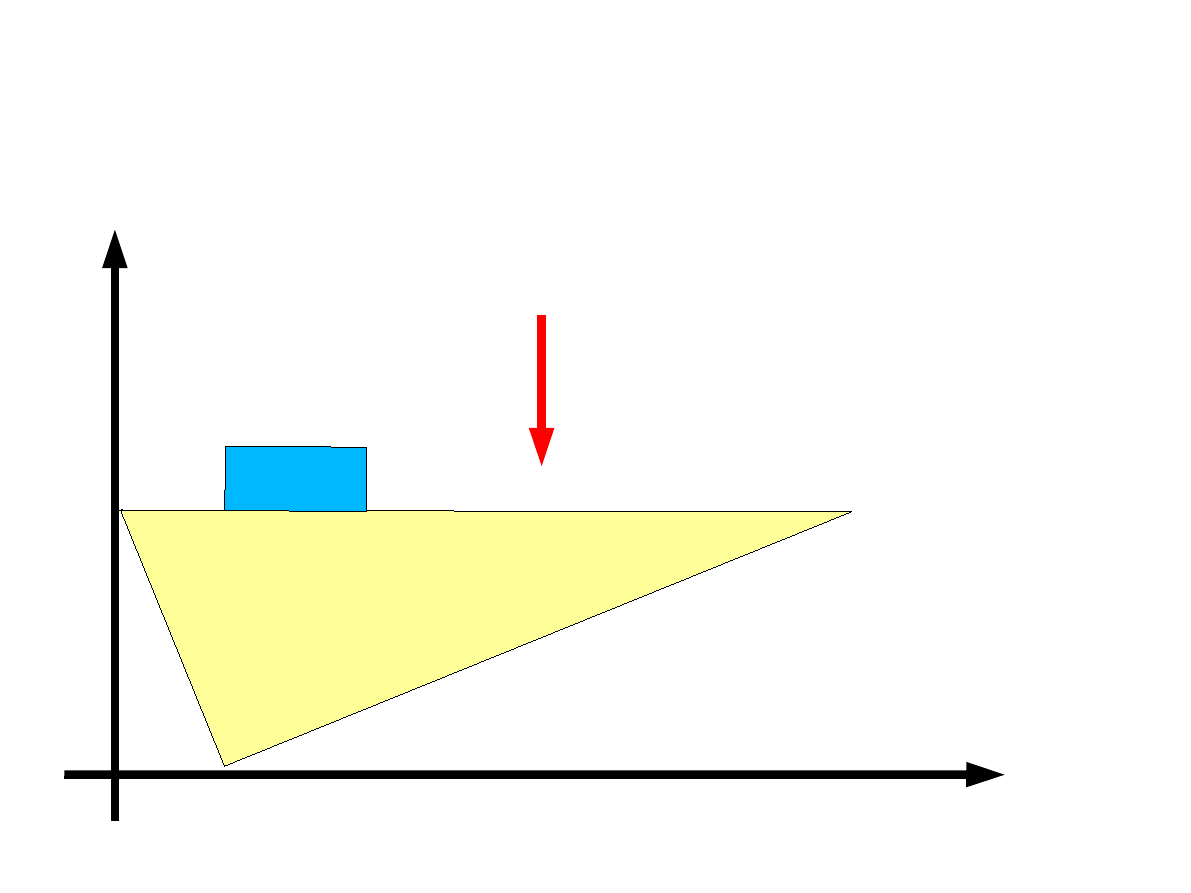
Układ odniesienia, względem którego ciało
swobodne spoczywa lub porusza się ruchem
jednostajnym prostoliniowym
jest to
układ inercjalny
II zasada dynamiki
d p
d t
=
F
samochód stoi
samochód jedzie po prostej
ze stałą prędkością
stała prędkość
V = const
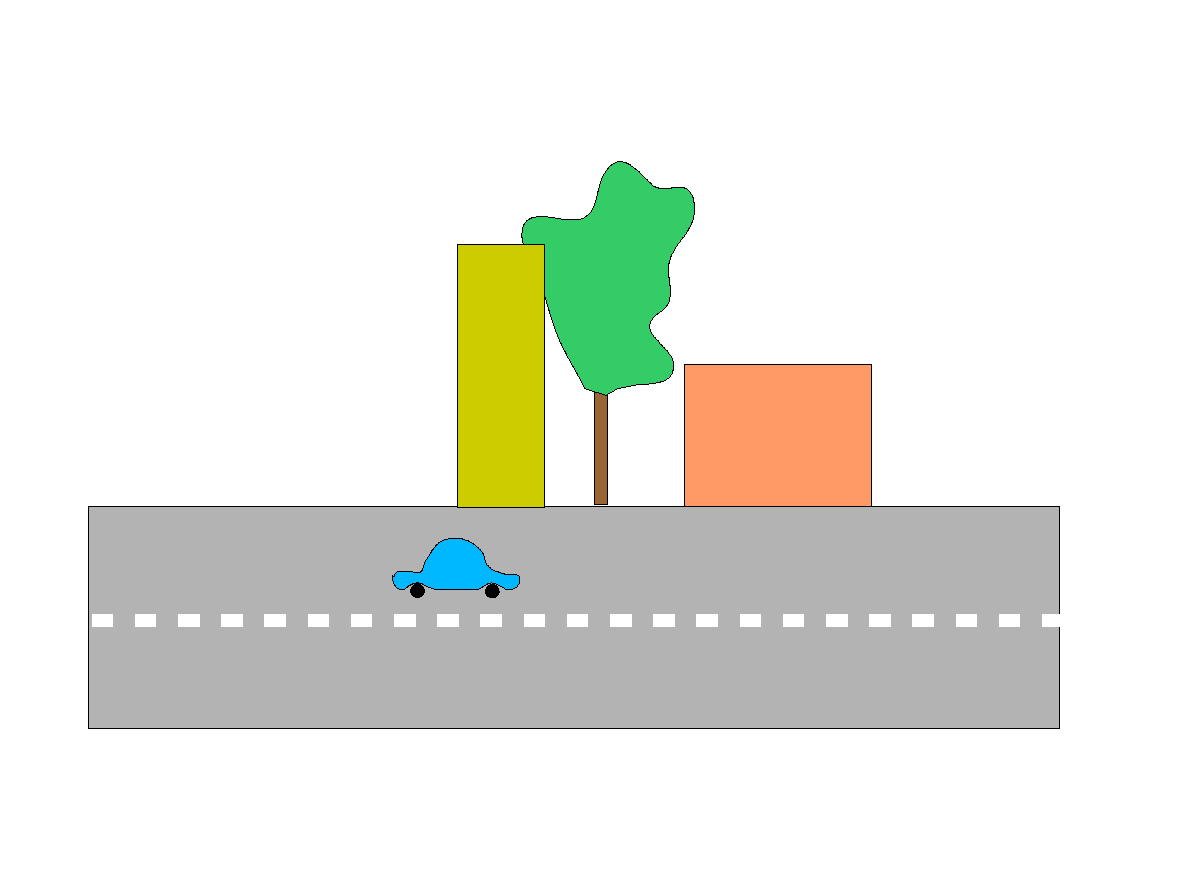
samochód jedzie po prostej
z przyspieszeniem a
przyspieszenie
a
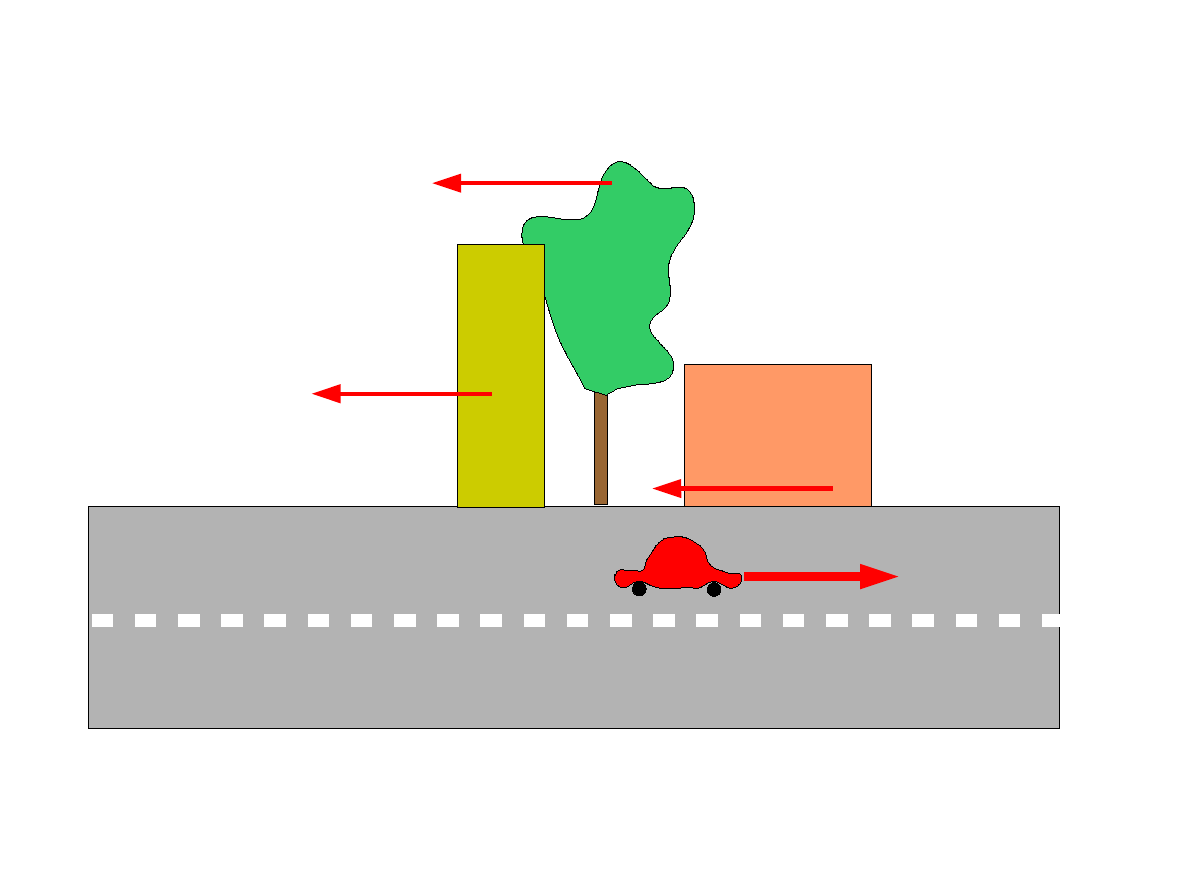
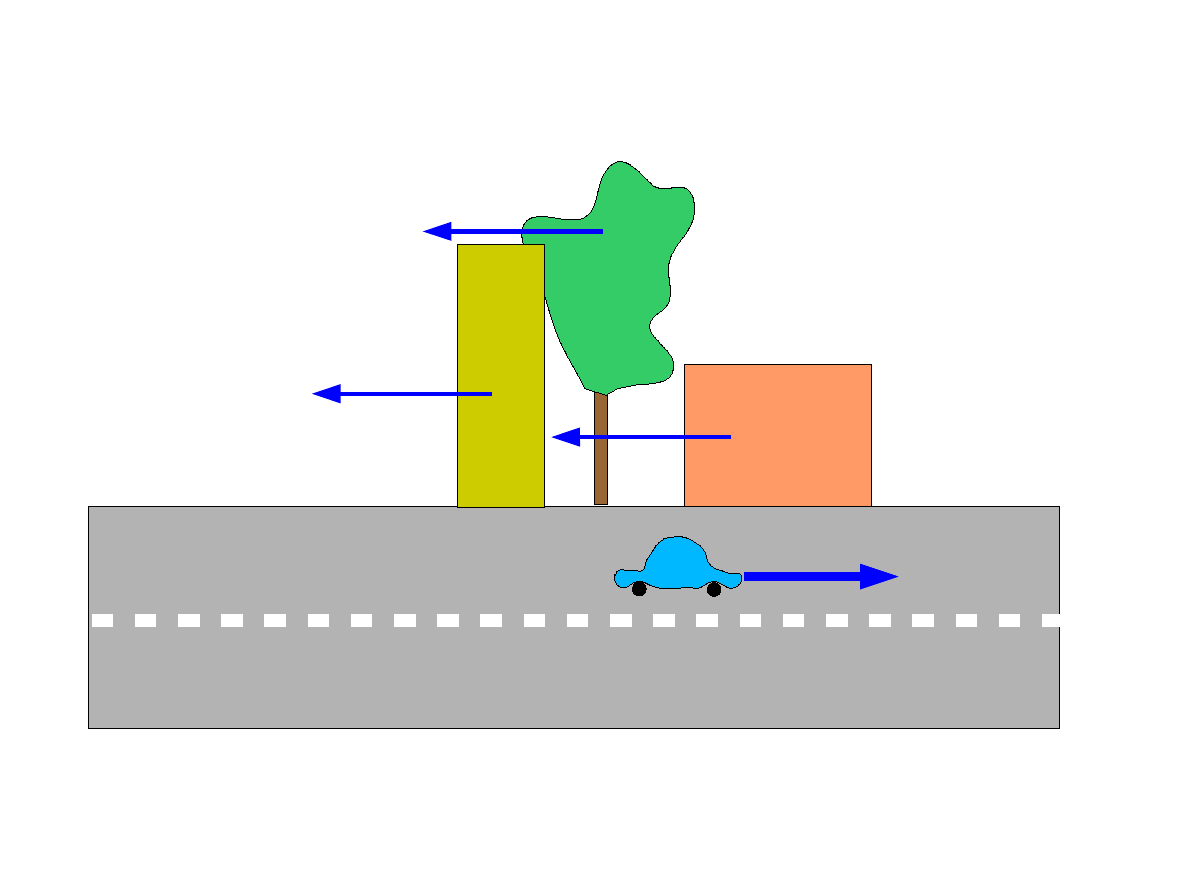
samochód jedzie po prostej
z przyspieszeniem
F
b1
=−
m
1
a m
1
m
2
m
3
F
b2
= −
m
2
a
F
b3
=−
m
3
a
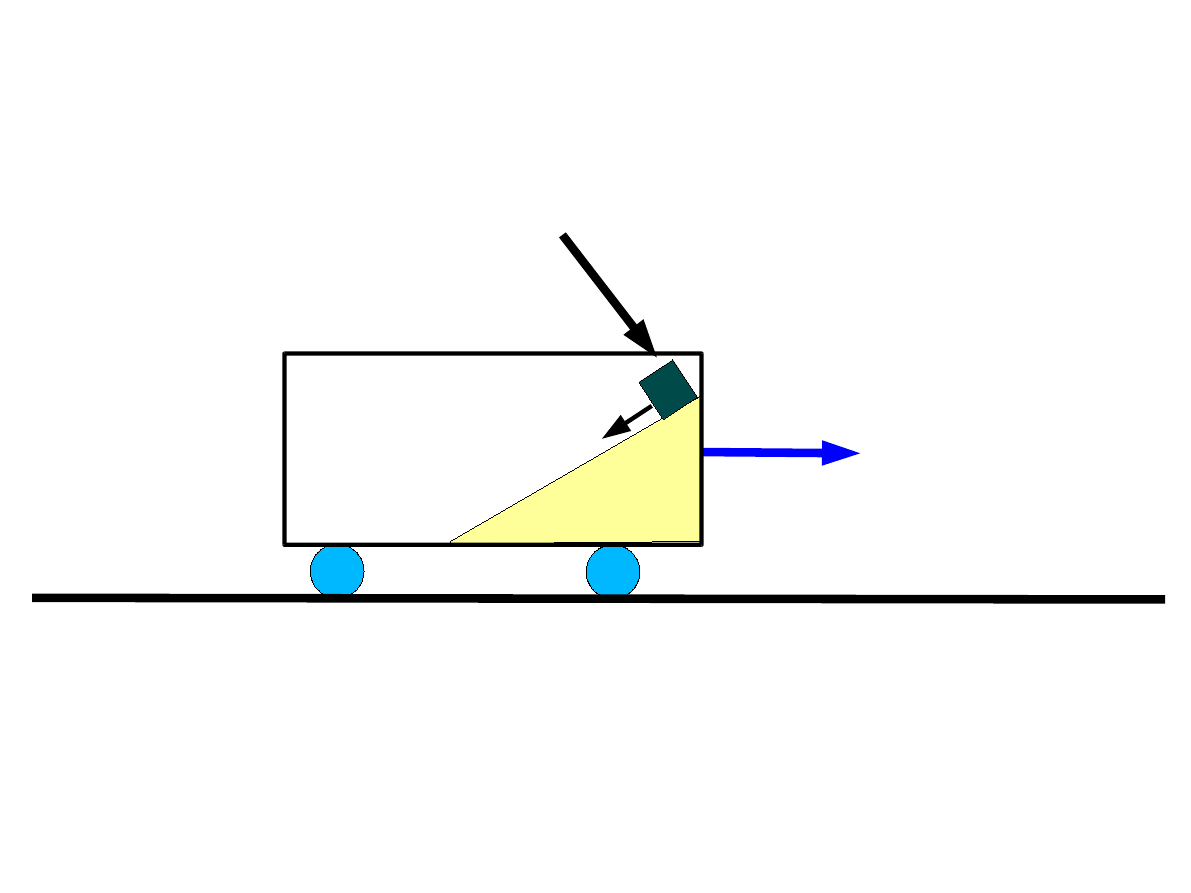
a
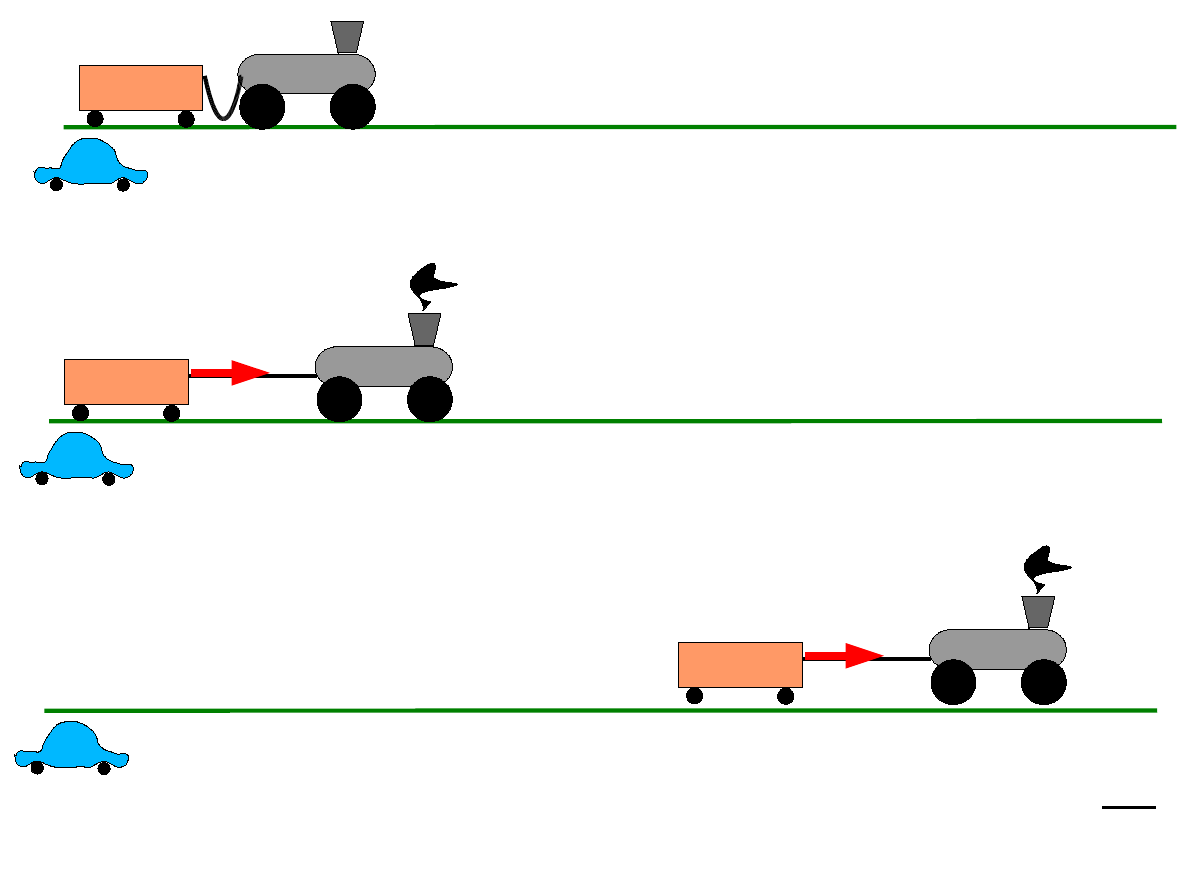
F ≠0
F
F = 0
a
w
=
F
m
m
m
m
samochód i wagon stoją
samochód stoi, pojawia się siła
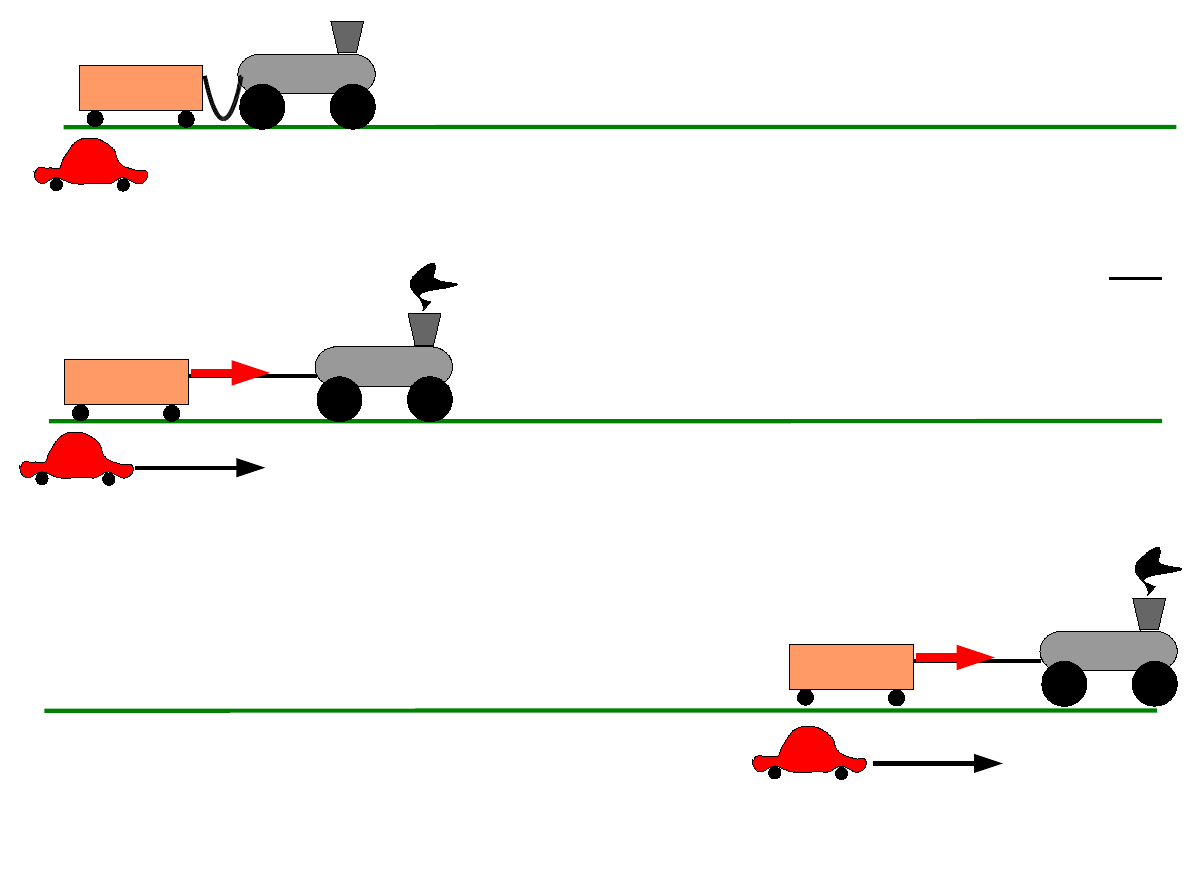
F ≠0
F
F = 0
a
w
=
F
m
m
m
m
samochód i wagon stoją
pojawia się siła,wagon rusza
z przyspieszeniem,
samochód rusza z tym samym przyspieszeniem
a
s
=
a
w
a
s
=
a
w
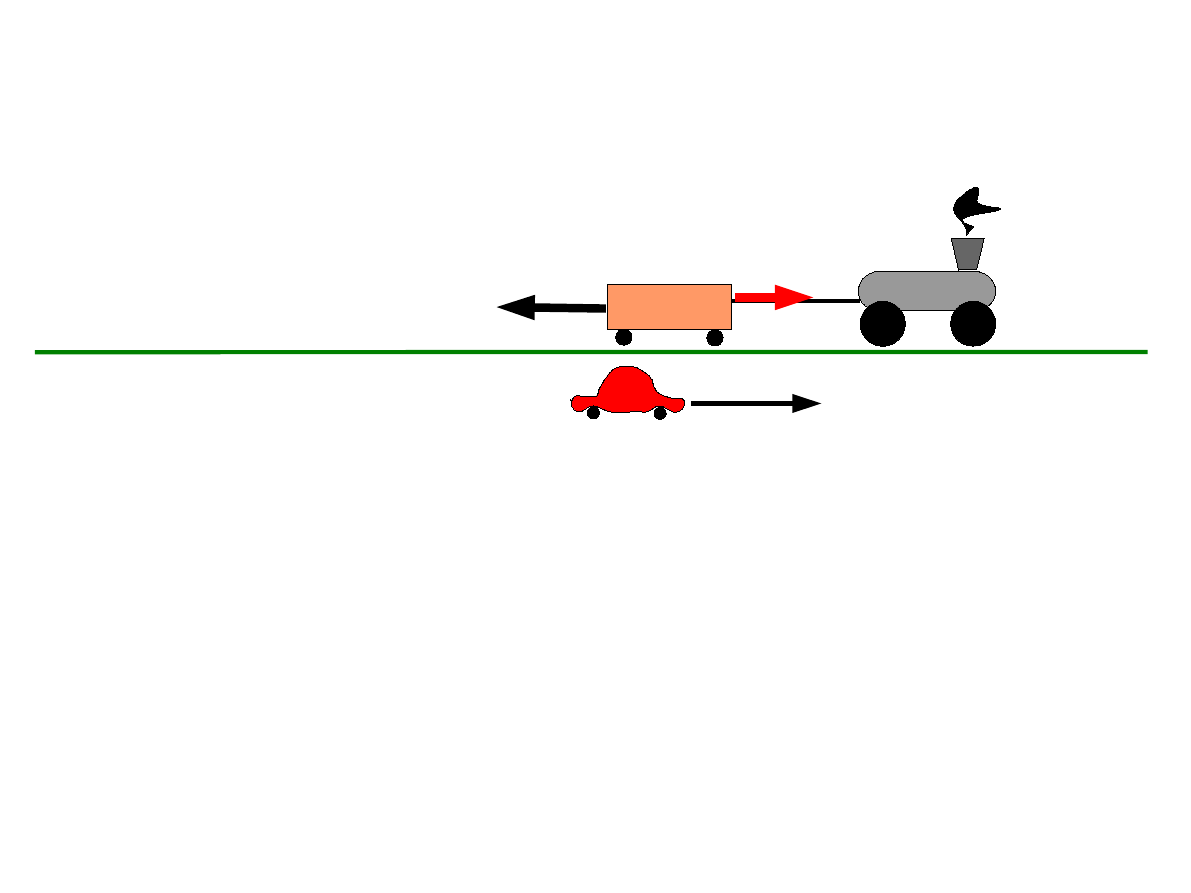
F
m
a
s
=
a
w
F
b
=
m
a
s
ma
wag / sam
=
F −
F
b
=
0
a
wag / sam
=
0
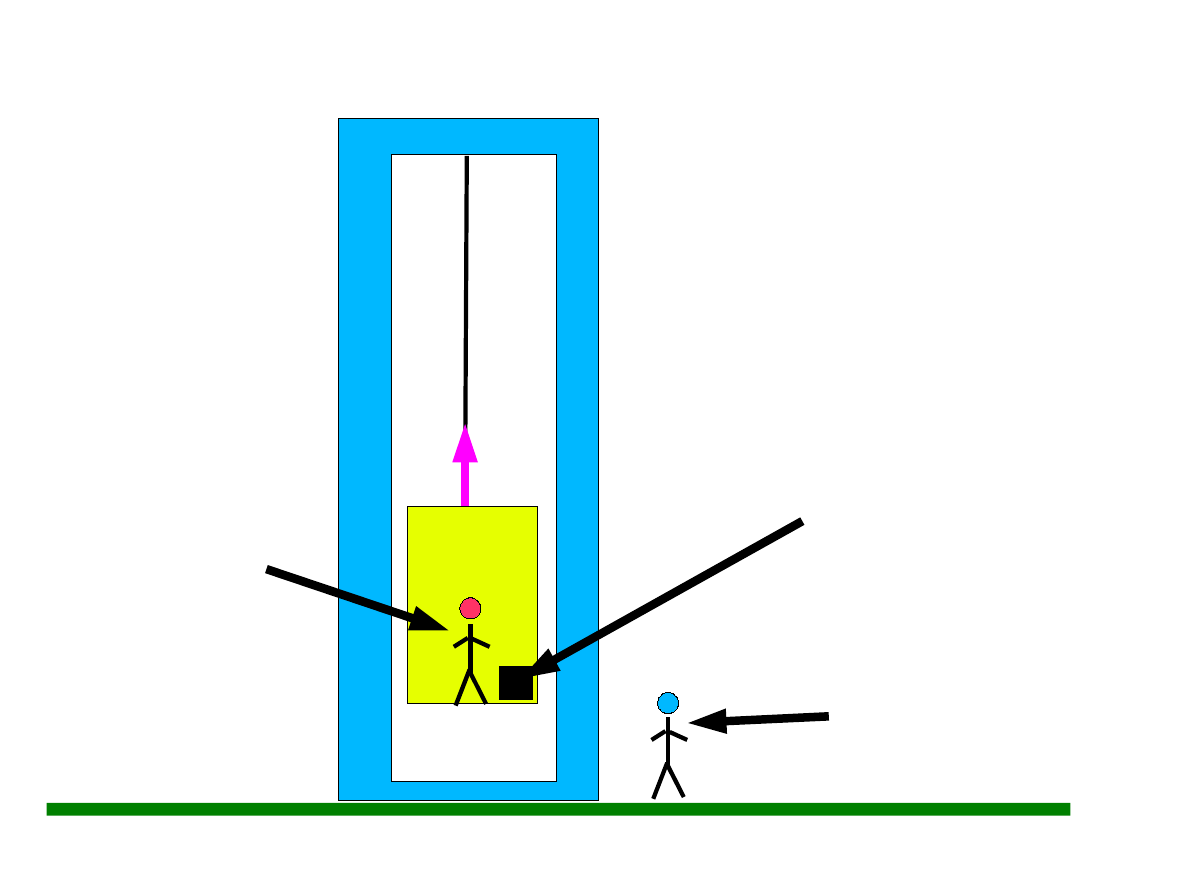
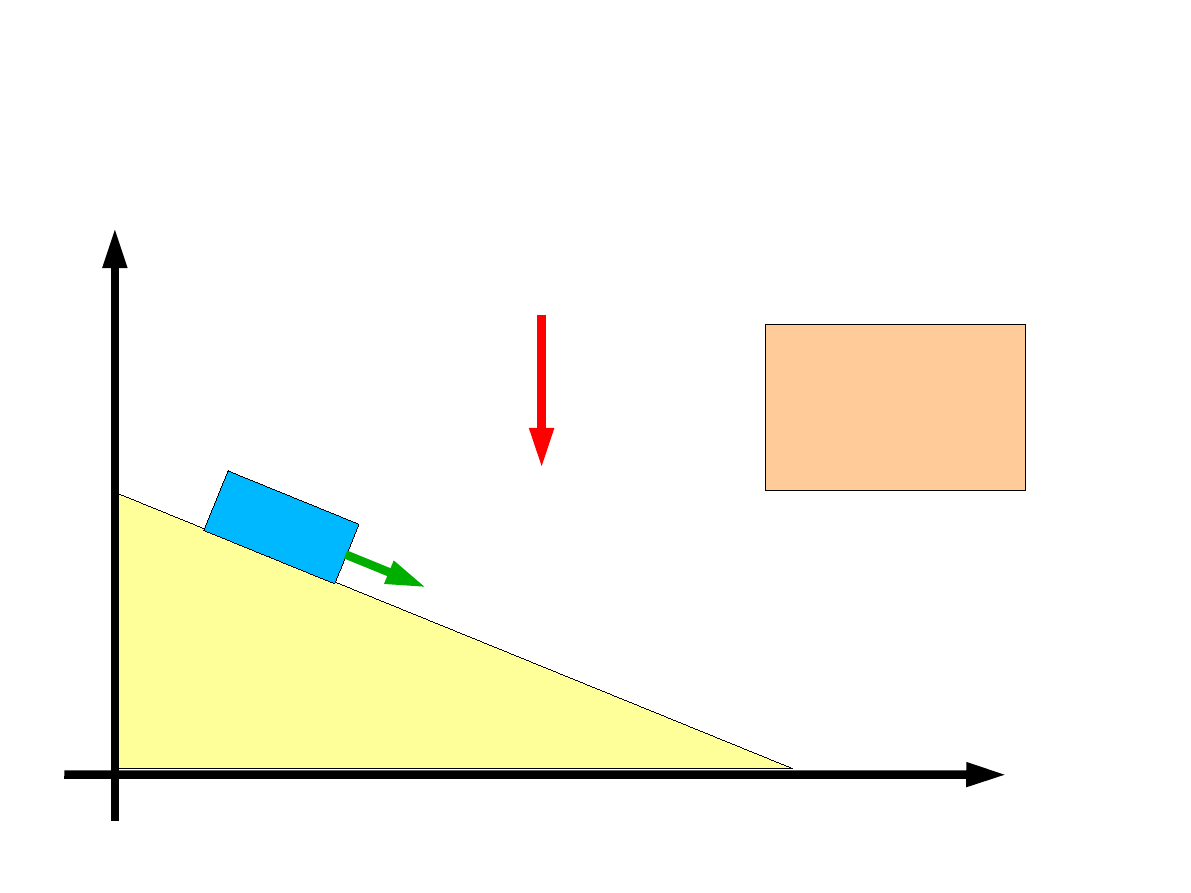
a
m
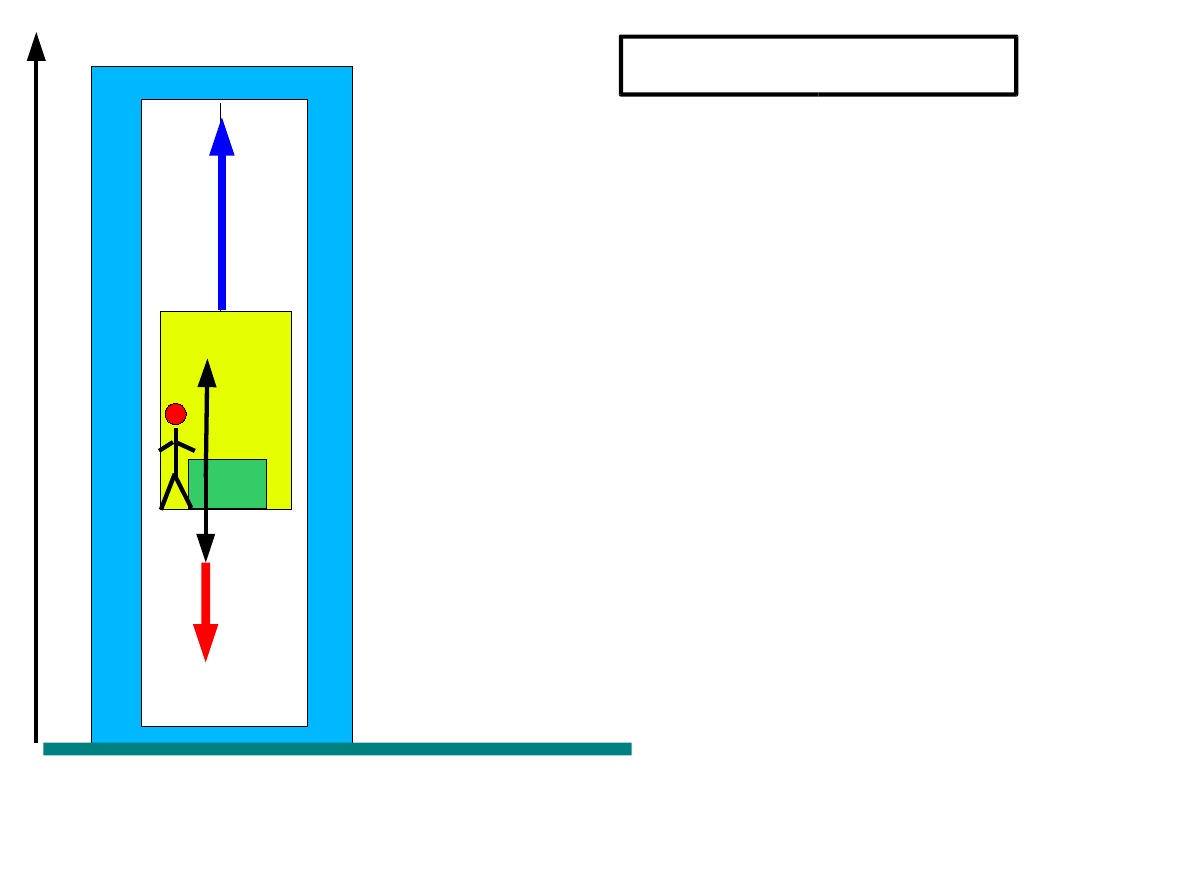
R
m g
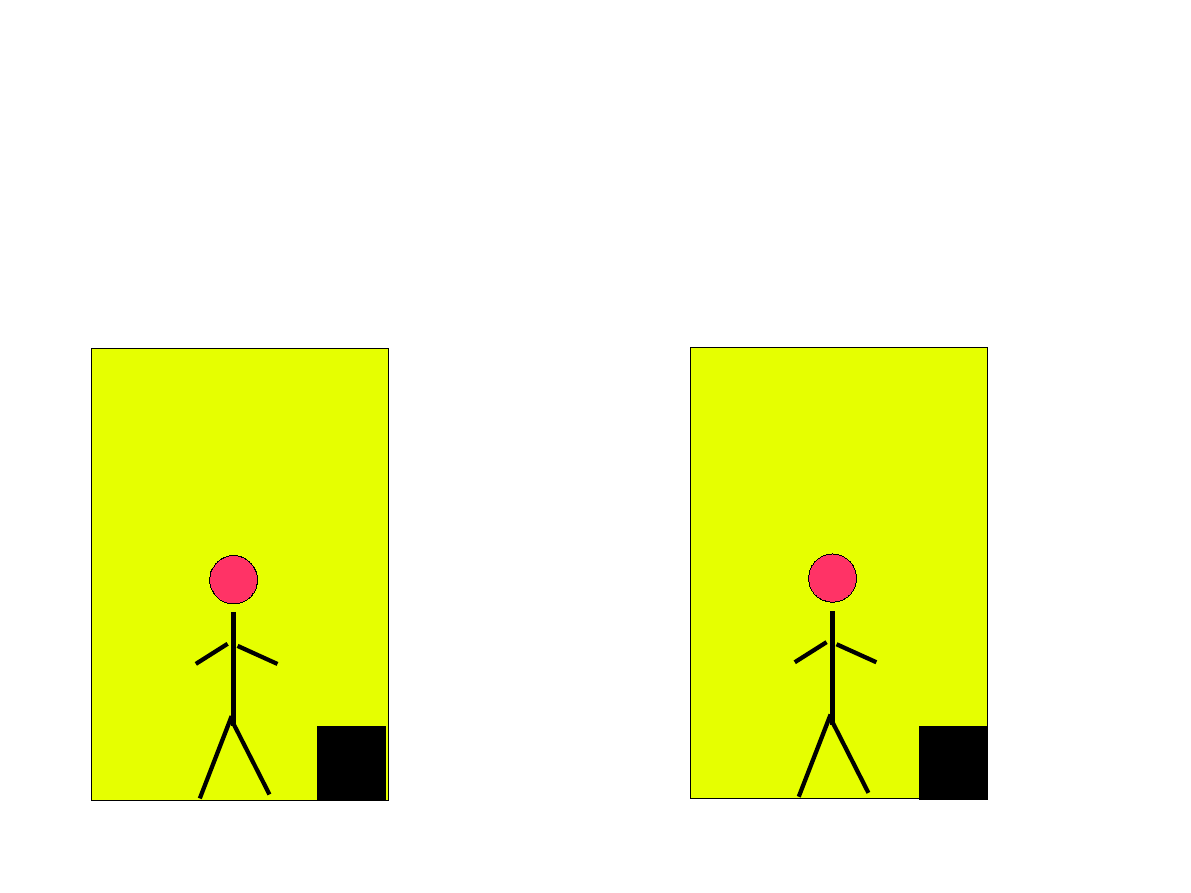
obserwator na ziemi
m a
y
=
R−m g
Y
R = m gm a
y
=
m ga
y
a
przyspieszenie klocka względem
obserwatora na ziemi
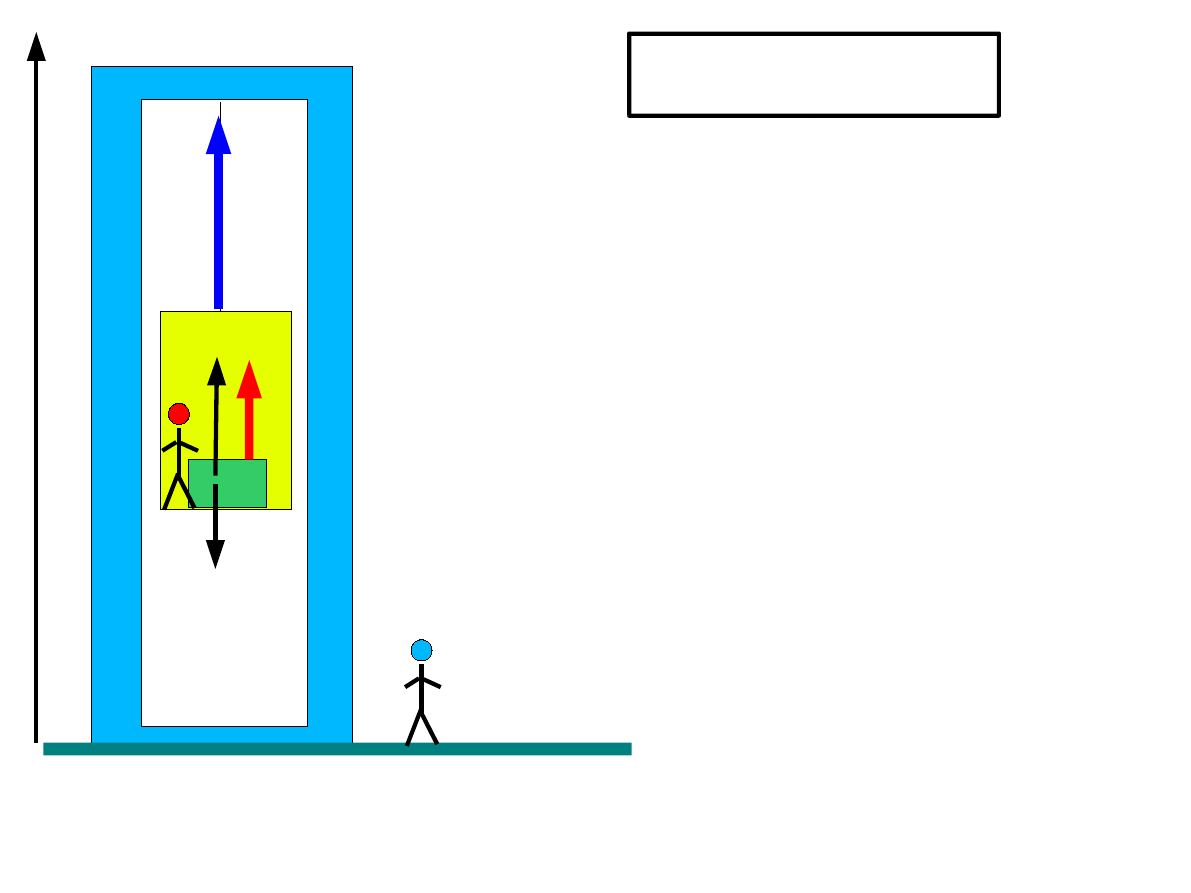
m
R
m g
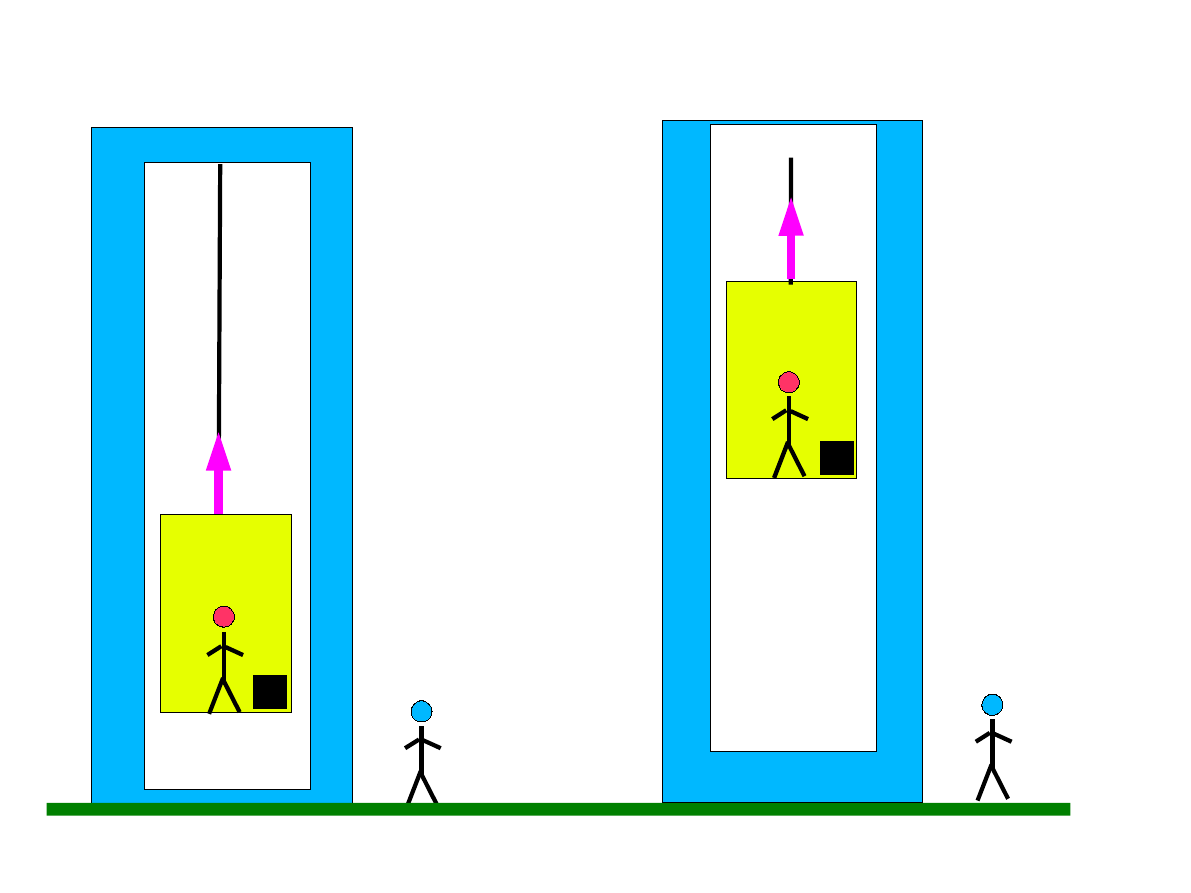
F
b
obserwator w windzie
m b
y
=
0
b = 0
R = m gm a
y
=
m ga
y
m b
y
=
R−m g−F
b
=
0
b
przyspieszenie klocka względem
obserwatora w windzie
R−m g =m a
y
≠
0
m a
y
−
F
b
=
0
F
b
=
m a
y
R−m g =F
b
Y
III zasada dynamiki
F
i j
= −
F
j i
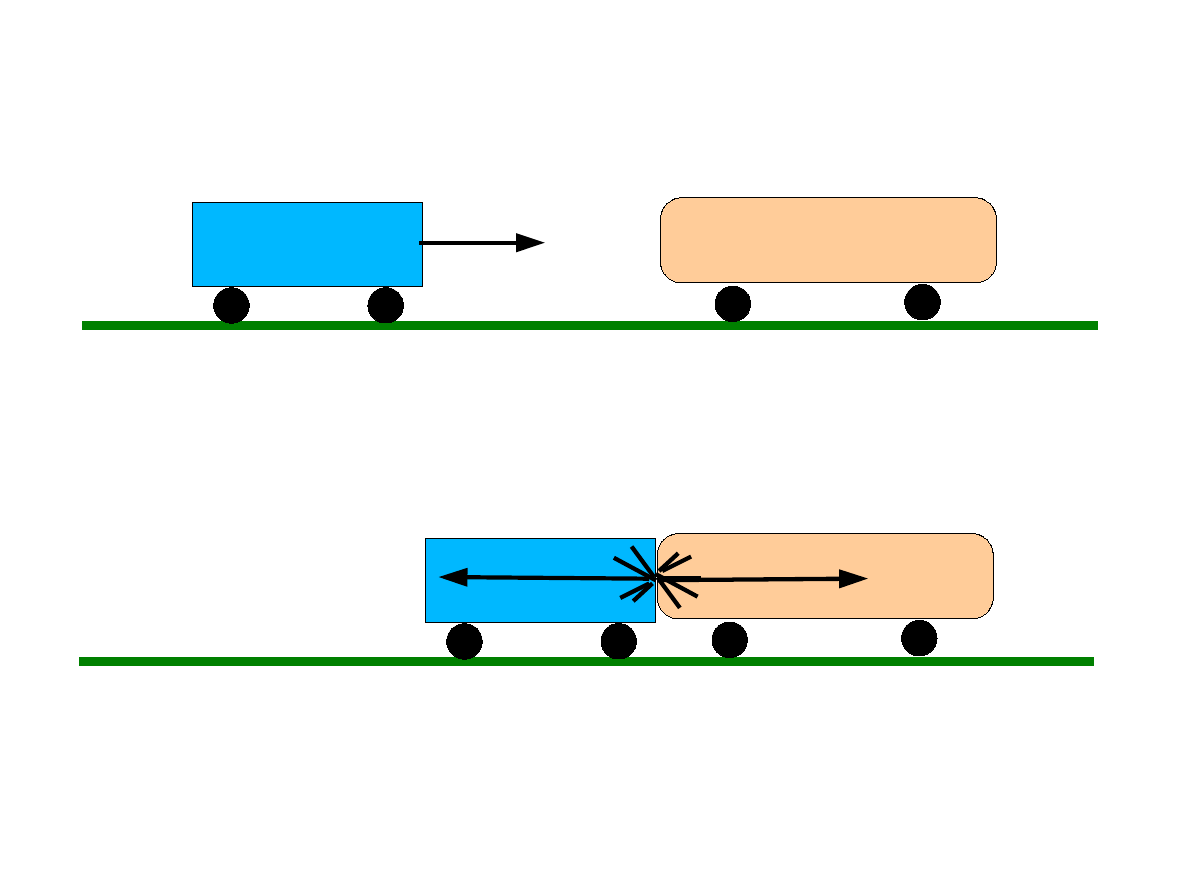
V
F
21
F
12
1
1
2
1
F
21
= −
F
12
Wyszukiwarka
Podobne podstrony:
IS wyklad 04 23 10 08 MDW
IS wyklad 03 16 10 08 MDW id 22 Nieznany
IS wyklad 05 30 10 08 MDW
IS wyklad 06 06 11 08 MDW id 22 Nieznany
IS wyklad 12 18 12 08 MDW
IS wyklad 11 11 12 08 MDW
09.10.08, Teologia, ROK I, Pedagogika, wykłady semestr zimowy
Analiza Finansowa Wykład 02 21 10 09
09.10.08, pedagogika
Wykład 02 [12.10.05], Biologia UWr, II rok, Zoologia Kręgowców
Wykład 18 (09.01.08), toxycologia
Encyklopedia Prawa - wyklad 04 [09.10.2001], INNE KIERUNKI, prawo, ENCYKLOPEDIA PRAWA
Podstawy finansow i bankowosci - wyklad 07 [09.10.2001], Finanse i bankowość, finanse cd student
tematy wykładów( 02 09
więcej podobnych podstron