Zeszyty Problemowe – Maszyny Elektryczne Nr 75/2006
113
Janusz Flasza
Politechnika Częstochowska, Częstochowa
STANY DYNAMICZNE W RZECZYWISTYM SAMOTOKOWYM
UKŁADZIE ELEKTROMASZYNOWYM /SUE/ Z SILNIKIEM
Sg 132 M-6B-S ZASILANYM Z ACS 600 LUB SIECI 3X380 V
DYNAMIC STATES IN REAL ROLLER TABLE ARRANGEMENT
ELECTROMECHANICAL /RTAE/ WITH ENGINE Sg 132 M -6B- S
POWER SUPPLY FROM ACS 600 OR 3X380 V
Abstract: Article introduces dynamic states in RTAE of type 2SM-HCS for choose burden of roller tables of
transporting line. Analysis is accomplished with of system for power supply as well as from converter of fre-
quency.
1. Wstęp
Od momentu, kiedy pojawiły się maszyny i u-
rządzenia składające się na EUN-elektroma-
szynowe układy napędowe istnieją problemy
przy doborze właściwego napędu. Nie zawsze
pierwszy wybór jest wyborem trafnym. Dużą
część czasu pochłania odpowiednie wyszuki-
wanie drogi doboru właściwego napędu opar-
tego o zaawansowane techniki informatyczne,
które to pozwalają dokonać symulacji bada-
nego modelu odzwierciedlając go z bardzo do-
kładnym przybliżeniem.
2. Podstawy dokonania wyboru rodzaju
napędu i sposobów sterowania, a możli-
wości obniżenia energochłonności
Jeżeli napęd projektowany ma pracować przy
stałej prędkości, to za najbardziej istotne należy
uważać zastosowanie silników asynchronicz-
nych klatkowych bądź pierścieniowych lub
synchronicznych o mocy ponad 100 kW. Prze-
de wszystkim należy tutaj wymienić prostotę
ich budowy, szczególnie silników asynchro-
nicznych klatkowych, niewielki koszt, łatwą
obsługę oraz możliwość bezpośredniego włą-
czania do sieci energetycznych niskiego lub
wysokiego napięcia. O wyborze między silni-
kami napędowymi decyduje rachunek ekono-
miczny oparty na wartości kosztów zakłado-
wych i eksploatacyjnych oraz rozruch, hamo-
wanie bądź nawrót układu. Zwykle instalowane
maszyny oraz urządzenia w zakładach przemy-
słowych napędzane silnikami elektrycznymi
były dobierane z reguły na prognozowanie,
maksymalne potrzeby tych zakładów. Były one
dobierane bez możliwości ekonomicznej regu-
lacji wydajności tych maszyn. W maszynach
przemysłowych potrzebne ze względów tech-
nologicznych zmiany wydajności uzyskiwane
są zwykle przez dławienie zaworami bądź
przez obiegi zwrotne. Silnik klatkowy, który
napędza to urządzenie pracuje nadal przy tej
samej prędkości obrotowej oraz pełnej mocy
znamionowej, co wiąże się z dużymi stratami
energii. Znaczne oszczędności energii są do
wyzyskania poprzez regulację wydajności tych
maszyn drogą zmiany prędkości obrotowej sil-
ników napędzających. Jednakże wiąże się to z
dużymi kosztami inwestycyjnymi [1]. Moder-
nizacja EUN w oparciu o silniki energoosz-
czędne z możliwością precyzyjnego sterowania
prócz efektów ekonomicznych daje możliwość
korzyści środowiskowych. Mianowicie nowo-
czesne silniki mają znacznie niższy poziom
hałasu – zwykle nie przekraczający 85 dB/A,
podczas gdy poziom starych maszyn przekra-
cza 100 dB/A. Ważne jest również zmniejsze-
nie zużycia energii elektrycznej. Opracowanie
poprawnego układu napędowego stanowi po-
czątek serii zadań, do czego niezbędna jest głę-
boka wiedza techniczna oraz know-how. W
oparciu o dane techniczne potrzebnego napędu,
jak moc czy moment obrotowy, inżynier ustala,
który silnik, przekładnia czy regulator napędu
nadaje się do tego celu. Ponadto należy ustalić,
jakie dodatkowe wyposażenie (filtry, chopper
hamujący, moduł komunikacji, etc.) będzie w
tym przypadku istotne. Te elementy napędu
muszą wzajemnie zostać dobrane w ten sposób,
aby móc zaproponować użytkownikowi jak
najlepszy system napędowy. Wykorzystanie
Zeszyty Problemowe – Maszyny Elektryczne Nr 75/2006
114
komponentów w oparciu o możliwość symula-
cji komputerowej tworzących napęd oraz
ważne dane techniczne pozwalają określić, czy
wybrane rozwiązanie jest optymalne, [2]. Do-
tychczas najprostsze wyliczenia wykonywano
ręcznie. Powtarzalne procesy można było upro-
ścić przy pomocy programów komputerowych.
Z katalogów można było dobrać znajdujące się
w sprzedaży produkty, a prawidłowość doboru
sprawdzić dopiero w praktyce dzięki odpo-
wiednim sprawozdaniom z użytkowania pro-
duktu. Ręczny dobór systemu napędowego na
potrzeby użytkownika na ogół zajmuje bardzo
dużo czasu, a w przypadku większych zadań -
możliwe jest wystąpienie błędów.
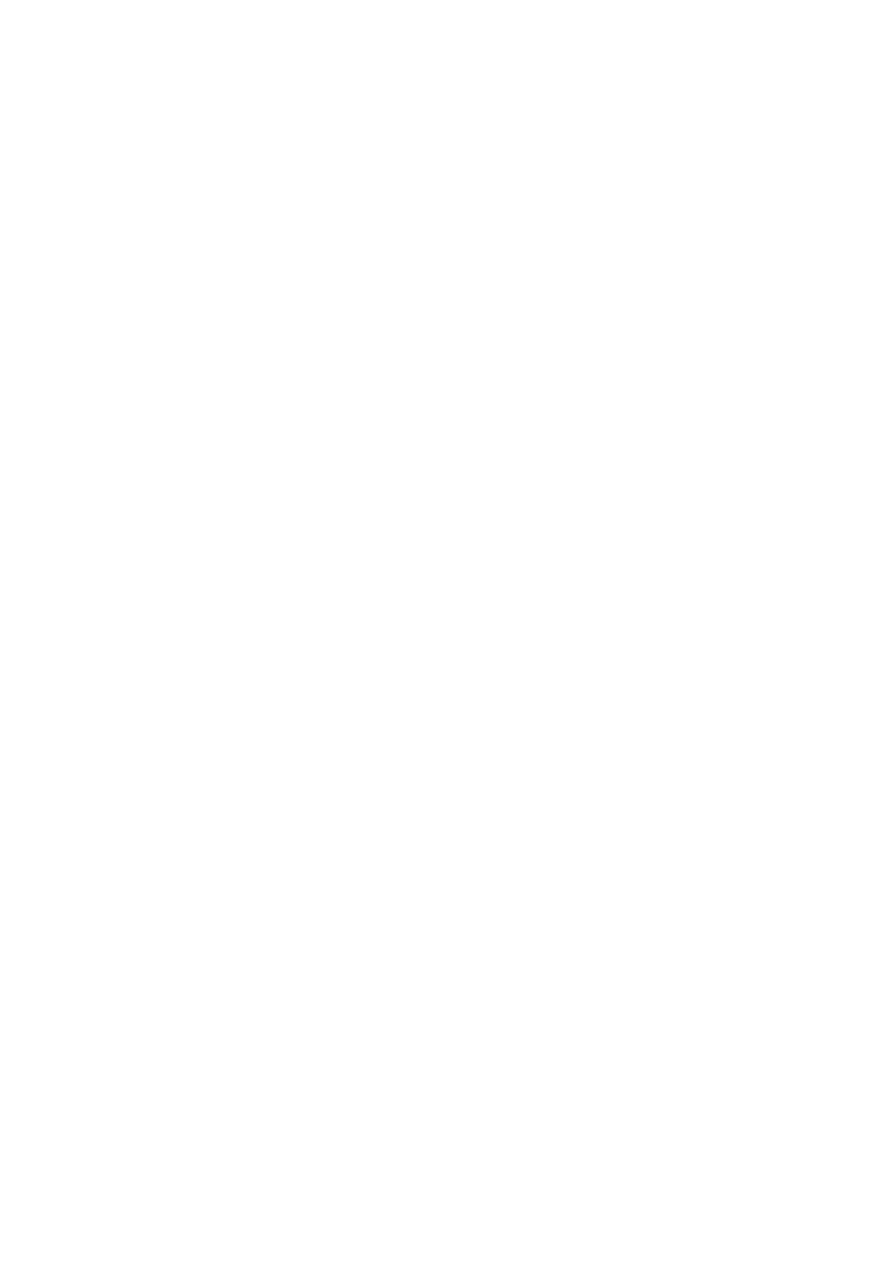
Rys.2.1. Wersja pionowa motoreduktora typu
2SM–HCS z indukcyjnym silnikiem samotoko-
wym o zwiększonym momencie rozruchowym,
gdzie: 1 – motoreduktor; 2 – gniazdo, 3 – rolka
samotoku, 4 – silnik as., 5 – podpora, [3]
W oparciu o rzeczywisty układ z rys. 2.1 został
opracowany model matematyczny uwzględ-
niający niezbędną kinematykę, pozwalającą na
otrzymanie przewidywanych przebiegów dy-
namicznych badanego układu,
[3].
4. Analiza matematyczna. Adaptacja mo-
delu do równań wyjściowych
Sformułowanie równań indukcyjnego silnika
samotokowego przeprowadzono w oparciu o
definicję wektorów przestrzennych [4], [5], [6],
natomiast model silnik–reduktor opracowano w
oparciu o [7] schemat kinematyczny rzeczywi-
stego układu silnik – reduktor przedstawia
rys. 4.1. Adaptacja modeli matematycznych
określonych odpowiednimi zależnościami [8]
ma na celu uzyskanie układu równań do symu-
lacji obliczeniowej, w których są pogrupowane
wielkości i parametry umożliwiające realizację
analizy obliczeniowej. Symulację obliczeniową
przeprowadzono dla układu zasilania sztywne-
go 3x380 V, 50 Hz, rys. 4.10, jak i zasilania z
przemiennika częstotliwości ACS 600, rys.4.11
i następujących danych konstrukcyjnych ukła-
du rolki:
- długość rolki,l
r
= 1500 mm
- średnica rolki d
r
= 260 mm
- średnica wału rolki d
w
= 120 mm
- długość czopu wału rolki l
c
= 250 mm
- przełożenie całkowite p
r
= 24
Zakres obliczeń obejmował przypadki obli-
czeniowe dla układów statycznie wyznaczal-
nych, [8]. Dane do przypadków obliczenio-
wych wzięto z opracowań prac naukowo-ba-
dawczych realizowanych przez Zakład Ma-
szyn i Napędów Elektrycznych Wydziału
Elektrycznego w Politechnice Częstochow-
skiej z zakresu analizy pracy samotokowych
linii transportowych [9], [10], [11].
Rys. 4.1. Schemat kinematyczny rzeczywistego
układu motoreduktorowego napędu rolki samo-
toku hutniczego, gdzie: 1 - indukcyjny silnik
samotokowy, 2 - sprzęgło, 3 - reduktor zębaty,
4 - rolka transportowa [7].
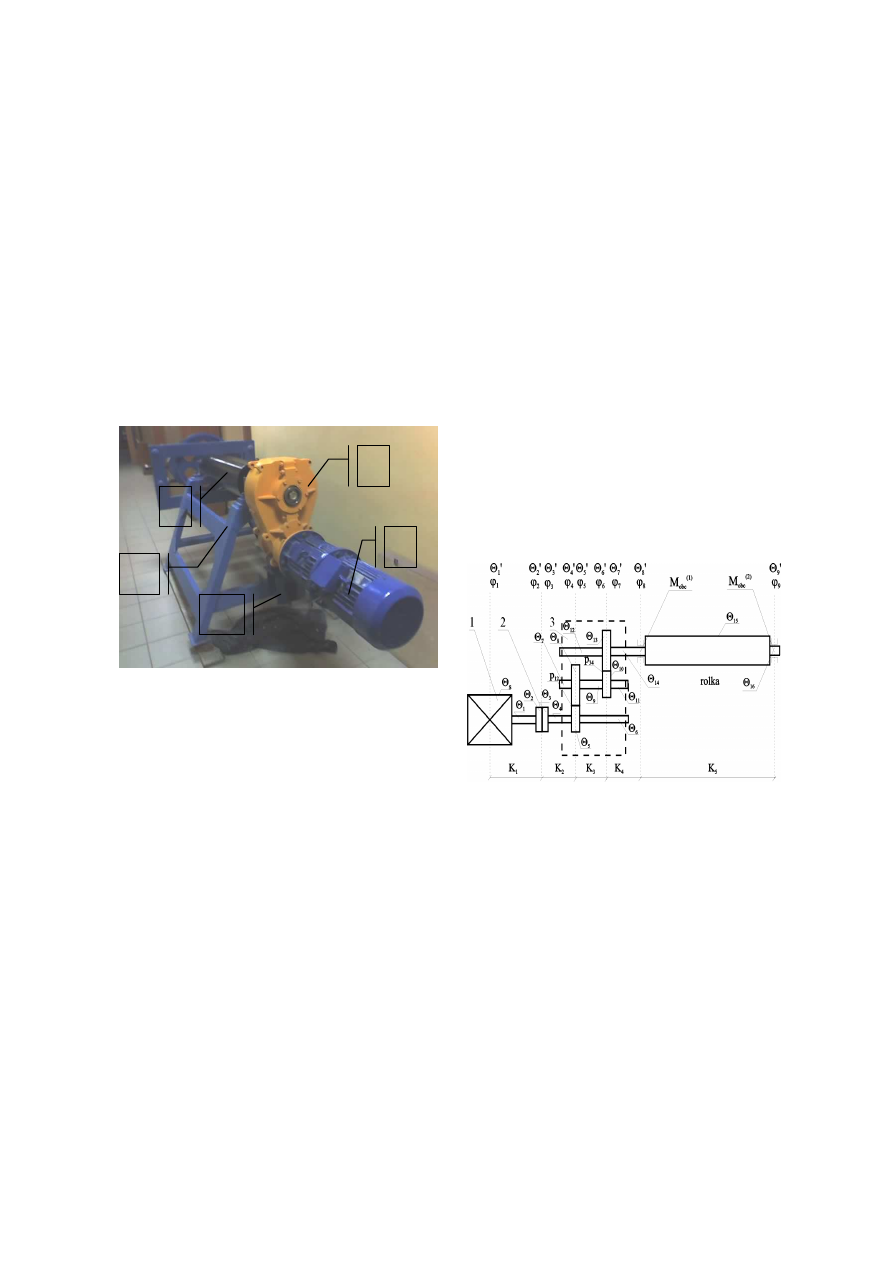
Na podstawie założonych danych dokonano
symulacji komputerowej w MATLAB/SIMU-
LINK i otrzymano odpowiednie charakterystyki
odpowiednio dla zasilania z sieci, rys.4.2, 4.3,
4.4, 4.5 oraz z przemiennika częstotliwości
ACS 600, rys. 4.6, 4.7, 4.8, 4.9.
1
2
3
4
5
Zeszyty Problemowe – Maszyny Elektryczne Nr 75/2006
115
0
1
2
3
4
5
6
7
8
9
10
-15
-10
-5
0
5
10
15
20
25
Time (second)
Rys.4.2. Przebieg momentu elektromagnety-
cznego w funkcji czasu dla zasilania z sieci,
M
e
=f(t)
0
1
2
3
4
5
6
7
8
9
10
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time (second)
Rys.4.3. Przebieg momentu obciążenia w funk-
cji czasu dla zasilania z sieci, M
o
=f(t)
0
1
2
3
4
5
6
7
8
9
10
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time (second)
Rys.4.4. Przebieg prądu pod obciążeniem
w funkcji czasu dla zasilania z sieci, I=f(t)
0
1
2
3
4
5
6
7
8
9
10
-0.5
0
0.5
1
1.5
Time (second)
Rys.4.5. Przebieg reakcji obciążenia występu-
jącej na rolce w funkcji czasu dla zasilania z
sieci, R
o
=f(t)
0
1
2
3
4
5
6
7
8
9
10
-25
-20
-15
-10
-5
0
5
10
15
20
Time (second)
Rys.4.6. Przebieg momentu elektromagnety-
cznego w funkcji czasu dla zasilania z ACS
600, M
e
=f(t)
0
1
2
3
4
5
6
7
8
9
10
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Time (second)
Rys.4.7. Przebieg momentu obciążenia w funk-
cji czasu dla zasilania z ACS 600, M
o
=f(t)
0
1
2
3
4
5
6
7
8
9
10
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time (second)
Rys.4.8. Przebieg prądu pod obciążeniem w
funkcji czasu dla zasilania z ACS 600,I=f(t)
0
1
2
3
4
5
6
7
8
9
10
-1
-0.5
0
0.5
1
1.5
2
Time (second)
Rys.4.9. Przebieg reakcji obciążenia występują-
cej na rolce w funkcji czasu dla zasilania z ACS
600, R
o
=f(t)
Zeszyty Problemowe – Maszyny Elektryczne Nr 75/2006
116
Coulombic
Friction
Rolka
samotoku
modu³ rolki1
Dead Zone
0.
Gain2
modu³
obliczaj¹cy
si³ê reakcji
w podporze wa³u
rolki samotoku
metod¹ Clebscha
modu³ reakcji
na podporach
Ut
Mux
Mux5
Us
Ur
3
p Liczba par
biegunów
Przekładnia
obr M/q
M obr/q
..1
Silnik
indukcyjny
parametry:
Usa Isa
Usb Isb
M obr
p
J
SILNIK TRÓJFAZOWY2
alfa
beta
na
R S T
ab -- RST1
R S T
na
alfa
beta
RST--ab
Chebychev Type II
HP Filter
Chebychev Type II
BP Filter2
Chebychev Type II
BP Filter3
t
To Work space1
Clock
0.104
J Moment
bezw³adnoœci sprowadzony
do wa³u silnika
Chebychev Type II
BP Filter
Elliptic
BP Filter
Reakcja
Mo
Chebychev Type II
BP Filter1
Me
U
To Work space3
Chebychev Type II
BP Filter4
Prad
Chebychev Type I
IIR LP Filter
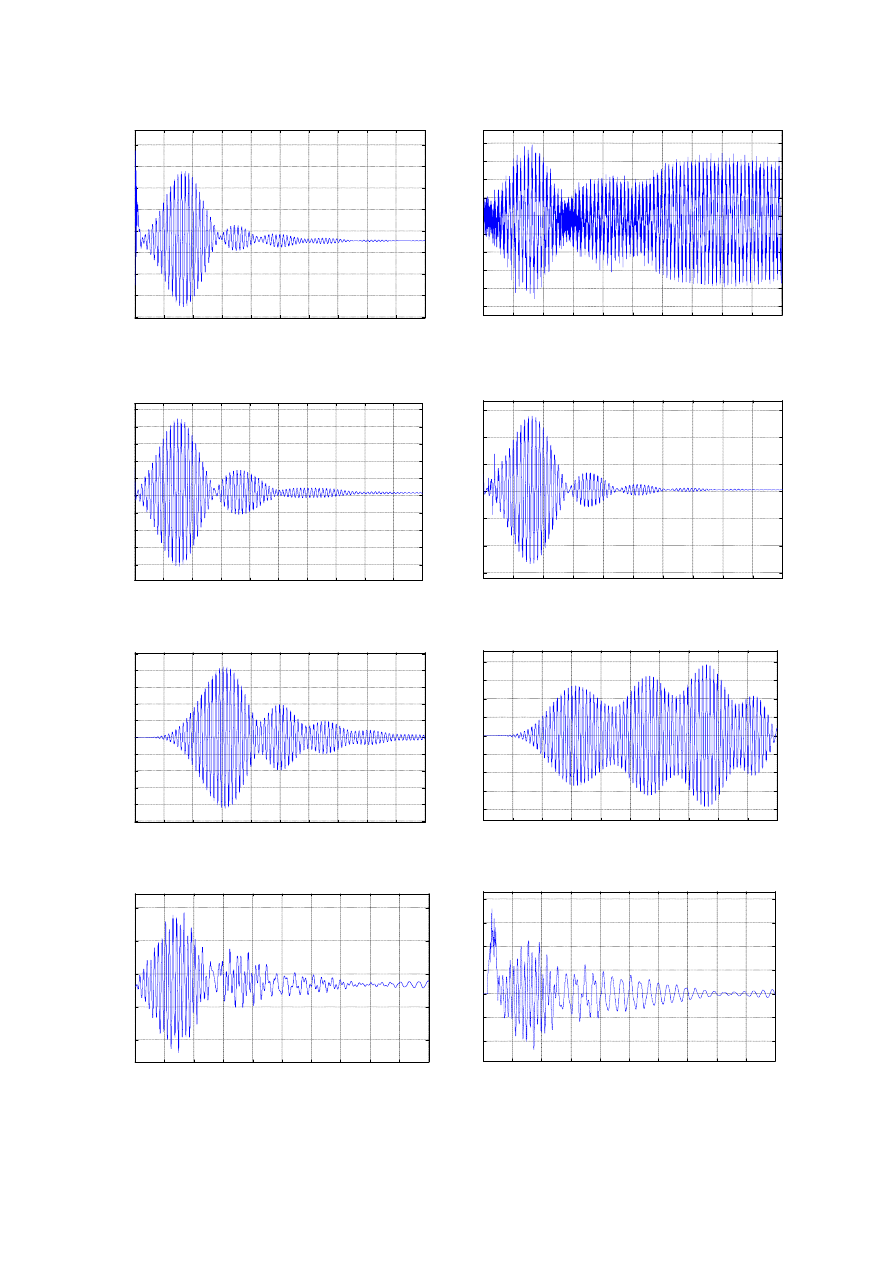
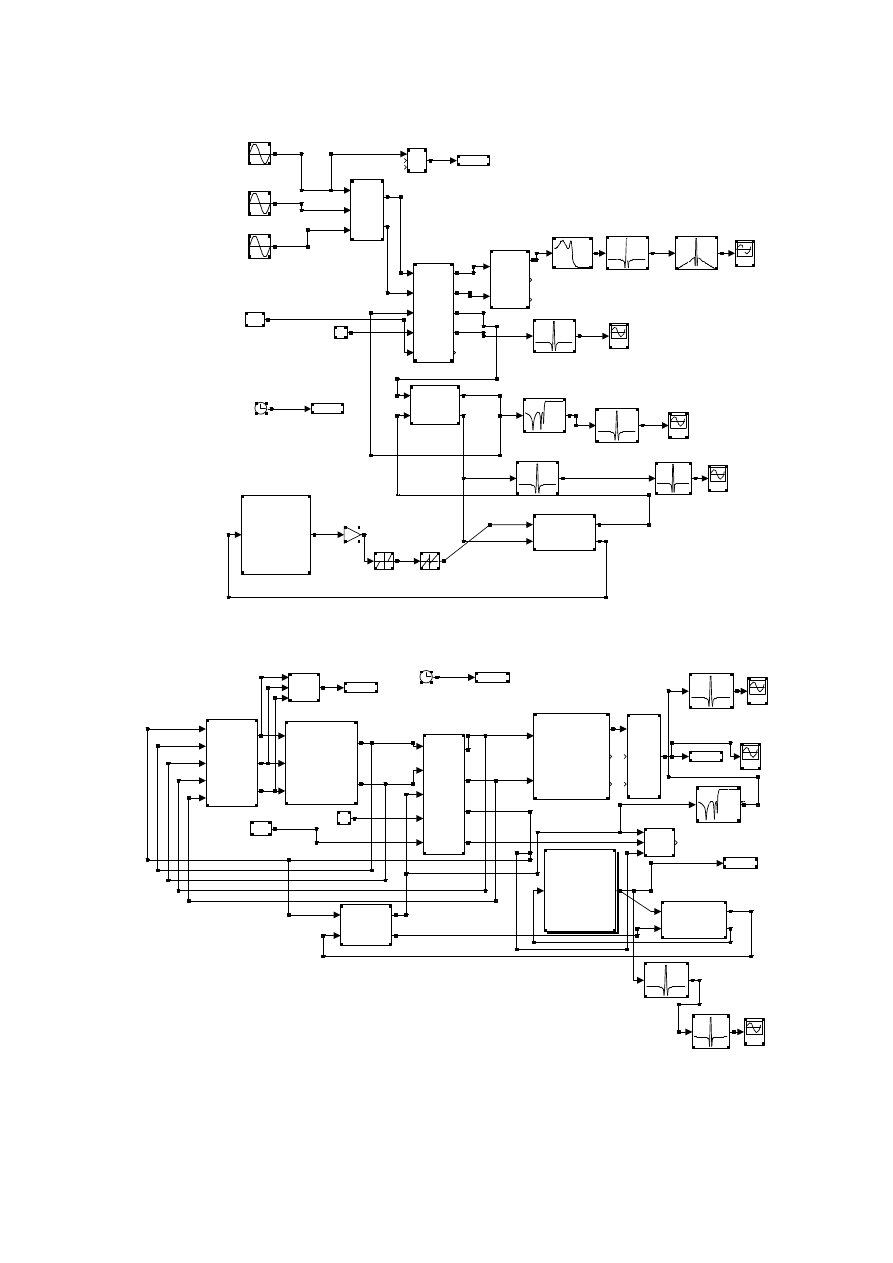
Rys.4.10. Schemat symulacyjny rzeczywistego układu motoreduktorowego napędu rolki samotoku
hutniczego zasilanego z sieci 3x380 [V], [8].
Przekładnia
obr M/q
M obr/q
przekŁadnia
TRANSFORMACJA
WSPÓ£RZÊDNYCH
alfa - beta
na
R S T
ab -- RST
2
p Liczba par
biegunów
0.104
J Moment
bezw³adnoœci sprowadzony
do wa³u silnika
TRANSFORMACJA
WSPÓ£RZÊDNYCH
RST
na
alfa -beta
RST--ab
Silnik
indukcyjny
parametry:
Usa Isa
Usb Isb
M obr
p
J
SILNIK TRÓJFAZOWY2
Mux
Mux2
modu³
obliczaj¹cy
si³ê reakcji
w podporze w a³u
rolki samotoku
metod¹ Clebscha
m od ul reak cji
na p odpo ra ch 1
MODEL
FALOWNIKA
ACS - 600
FALOWNIK
Mux
Mux3
U
To Work space4
Clock
t
To Work space
Mux
Mux1
I
To Work space1
Rolka
samotoku
modul rolki1
Ra
To Work space3
Chebychev Type II
BP Filter
Elliptic
BP Filter
Reakcja
I
Chebychev Type II
BP Filter2
Mo
Chebychev Type II
HP Filter
Rys.4.11. Schemat symulacyjny rzeczywistego układu motoreduktorowego napędu rolki samotoku
hutniczego zasilanego z przemiennika częstotliwości ACS 600,[8]
.

Zeszyty Problemowe – Maszyny Elektryczne Nr 75/2006
117
5. Podsumowanie
Współczesna technika nadzoru procesów pro-
dukcyjnych jest na wysokim poziomie rozwoju,
ta sytuacja wymusza procesy wsteczne ewolu-
ujące do najnowszych zdobyczy naukowych.
Każdy produkt finalny w dowolnej branży
technicznej powinien cechować się wysoką ja-
kością wykonania i powinien być pozbawiony,
tzw. błędów „wieku dziecięcego”.
We współczesnych elektromaszynowych ukła-
dach napędowych nie wystarczy odpowiednio
dobrać silnik i przekładnie do wymaganego
momentu obciążenia jak i wymaganej prędkości
w cyklu technologicznym. Obecnie istnieje
możliwość precyzyjnego zaprojektowania poje-
dynczego zespołu napędowego, jak i moduło-
wego elektromaszynowego systemu napędo-
wego od fazy początkowej. Kiedy to jest two-
rzona nowa linia produkcyjna, ale i w momen-
cie wymiany – remontu starej linii produkcyj-
nej; można z bardzo dużą precyzją dokonać od-
powiedniego doboru nowych układów napędo-
wych opartych o najnowsze silniki energoosz-
czędne serii SEE. Obecna wiedza inżynierska
posiada
znakomicie
rozwinięte
platformy
wspomagania projektowego, które pozwalają:
zmniejszyć koszty produkcji;
przeprowadzić diagnostykę w trybie on-line;
dokonać w sposób ciągły bezingerencyjny
korekty odpowiednich parametrów konstruk-
cyjnych i elektrycznych celem odpowied-
niego doboru do zadanych parametrów ste-
rowalnych na linii produkcyjnej wyposażonej
w EUN;
budować w trybie wirtualnym gotowe EUN;
testować w pętli zamkniętej zadany produkt,
celem wykrycia wad;
selektywną zmianę poziomów projektowania
z zapamiętaniem sekwencji poprzednich;
na podstawie analizy pomiarowej układów
wirtualnych proponować punkty pomiarowo
– kontrolne celem zachowania wymaganej
ciągłości procesu produkcyjnego.
Dzięki połączeniu wiedzy i doświadczenia in-
żynierskiego z algorytmami ewolucyjnymi na
płaszczyźnie informatycznej są opracowane co-
raz to nowe programy wspomagające cało-
ściowy proces doboru odpowiedniego napędu
do wymaganych zadań. Sądzę, że nowo po-
wstające elektromaszynowe układy napędowe
będą na tyle dopracowane i spełniające ocze-
kiwania procesu przemysłowego na ile proces
projektowy będzie ograniczony mocą oblicze-
niową jednostek komputerowych, a badania
naukowe będą mogły być odwzorowywane w
rzeczywistości. W oparciu o przeprowadzone
obliczenia symulacyjne stanów dynamicznych
samotokowego układu napędowego z motore-
duktorami
konstrukcji
specjalnej
przy
uwzględnieniu rzeczywistych obciążeń można
sformułować następujące wnioski końcowe:
przyjęty model matematyczny motoreduktoro-
wego układu napędowego pozwala na przepro-
wadzenie obliczeń symulacyjnych, przeprowa-
dzone obliczenia symulacyjne stanów dyna-
micznych motoreduktorowego układu napędo-
wego pozwalają na określenie charakterystyk
obciążenia dla różnych układów linii samoto-
kowych zależnych od modułu samotoku,
uwzględniających wybrane przypadki oblicze-
niowe. Przedstawiona analiza symulacyjno-ob-
liczeniowa nie wyczerpuje zagadnień związa-
nych z wpływem stanów dynamicznych na
pracę motoreduktorowych układów napędo-
wych w warunkach rzeczywistych, niemniej
pozwala na ich bardziej szczegółową analizę
poprzez uwzględnienie przy projektowaniu,
doboru lub analizie układu istniejącego wpływu
drgań występujących w stanach dynamicznych,
które w niektórych warunkach rzeczywistych są
porównywalne czasowo ze stanami pracy usta-
lonej.
6. Literatura
[1]. Bernatt J.: „Maszyny Elektryczne – zeszyty Pro-
blemowe”, Branżowy Ośrodek Badawczo-Rozwo-
jowy Maszyn Elektrycznych Komel Katowice 2003
[2]. Grabna E.: „Droga doboru właściwego napędu
DRIVE SOLUTION DESINGER DSD”, praca ma-
gisterska Politechnika Częstochowska, Wydział
Elektryczny, 2005r.
[3]. Flasza J.: Rzeczywiste obciążenia samotokowego
układu wraz z motoreduktorami. II Krajowa Konfe-
rencja, Hutnicze Napędy Elektryczne, Politechnika
Częstochowska, Wydział Elektryczny i Huta „Czę-
stochowa”, Poraj k/Częstochowy, 8 - 9.12.’97.
[4]. Kaźmierkowski M. P., Sulkowski W.: Napęd z
silnikiem klatkowym sterowanym metodą polową
zorientowaną. Przegląd Elektrotechniczny 1987,
nr 6, s. 153-158.
[5]. Kaźmierkowski M. P.: Sterowanie polowo zo-
rientowane czy regulacja bezpośrednia momentu
silnika klatkowego. Elektronizacja 1998, nr 2,
s. 15-19.
[6]. Kaźmierkowski M. P.: Sterowanie wektorowe
silników klatkowych zasilanych z falowników napię-
cia PWM. Materiały Seminarium Naukowego Poli-
technika Warszawska, Warszawa 1998.

Zeszyty Problemowe – Maszyny Elektryczne Nr 75/2006
118
[7]. Lis M.: Stany dynamiczne motoreduktorowego
układu napędowego z silnikiem samotokowym.
Praca doktorska 2001.
[8]. Flasza J.: Stany dynamiczne samotokowego
układu napędowego z motoreduktorami konstruk-
cji specjalnej przy uwzględnieniu rzeczywistych
obciążeń. Praca doktorska 2002.
[9]. Praca naukowo-badawcza nr rej. BZ-21-
01/93/R, Projekt techniczny i wykonanie motore-
duktorów układu napędowego samotoków linii COS
Huty “CZĘSTOCHOWA”, Opr. nr 01 - Projekt
techniczny reduktora zębatego typ 2SM-325HCS-
24/265 do napędu ciągu samotokowego COS/R22-
R54 (opracowanie niepublikowane) Politechnika
Częstochowska, Instytut Elektroniki i Systemów
Sterowania, Zakład Maszyn i Napędów Elektrycz-
nych, Częstochowa, 1994.
[10]. Praca naukowo-badawcza nr rej. BZ-21-
01/93/R, Projekt techniczny i wykonanie motore-
duktorów układu napędowego samotoków linii COS
Huty “CZĘSTOCHOWA”, Opr. nr 02 - Projekt
techniczny reduktora zębatego typ 2SM-325HCS-
24/300 do napędu ciągu samotokowego COS/R1-
R21, (opracowanie niepublikowane) Politechnika
Częstochowska, Instytut Elektroniki i Systemów
Sterowania, Zakład Maszyn i Napędów Elektrycz-
nych, Częstochowa, 1994.
[11]. Praca naukowo-badawcza nr rej. BZ-21-
01/93/R, Projekt techniczny i wykonanie motore-
duktorów układu napędowego samotoków linii COS
Huty “CZĘSTOCHOWA”, Opr. nr 03 - Projekt
techniczny indukcyjnego silnika samotokowego
typu Skg132-6B-S, 5.5 [kW], 1000 [obr/min] do
napędu ciągu samotokowego COS/R22-R54, (opra-
cowanie niepublikowane)
Autor
Janusz FLASZA,
Politechnika Częstochowska
Wydział Elektryczny
Al. Armii Krajowej 17,
tel./fax.: (034) 3250 821
e-mail: fje@el.pcz.czest.pl
Wyszukiwarka
Podobne podstrony:
Tyrystor jest elementem półprzewodnikowym składającym się z 4 warstw w układzie 1, ELEKTRONIKA, Elek
FIZYKA Siła elektrodynamiczna, indukcja, silnik
Tyrystor jest elementem półprzewodnikowym składającym się z 4 warstw w układzie p, ELEKTRONIKA, Elek
Ident. obiektu dynamicznego nr2, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
SILNIK BOCZNIKOWY- 3.2 moje, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.
Zadania rozwiązania Kinematyka,dynamika,bryła sztywna, relatywistyczna, elektrostatyczna, grawitac
3, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.2 BADANIE SILNIKA BOCZNIKO
Temat nr 10 - elektroniczne indykowanie silników okretowych, Akademia Morska, 3 rok, luzem
Źródło rzeczywiste, ►Studia, Semestr 3, Elektrotechnika Laboratorium
LP3, Studia, Elektrotechnika i elektronika, sprawko silnik
elektra.lab.silnik, Studia, AAAASEMIII, 3. semestr, Elektrotechnika II, Pack, Pack
Tyrystor jest elementem półprzewodnikowym składającym się z 4 warstw w układzie 1, ELEKTRONIKA, Elek
wzór elektrotechnika IV silniki
sprawko kompensacja, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (moduł C),
10 Silnik obcowzbudny pradu stalego zasilany z przeksztaltnika tranzystorowego
D19250709 Rozporządzenie Prezydenta Rzeczypospolitej z dnia 19 września 1925 r o warunkach przenosz
Badanie właściwości dynamicznych i rozruchowych trójfazowego silnika klatkowego, SGGW TRiL, Elektrot
Badanie właściwości dynamicznych i rozruchowych trójfazowego silnika klatkowego(1), SGGW TRiL, Elekt
więcej podobnych podstron